Настоящее изобретение относится к устройствам для сообщения движения того типа, которые способны сообщать движение грузу с целью позиционирования его или же с целью управления или модификации его движения. Настоящее изобретение может найти применение в широком диапазоне устройств, например в позиционирующих устройствах производственного оборудования. В общем случае такое оборудование требует не того, чтобы устройство выполняло механическую обработку материала (например, резание или деформирование его), а чтобы оно управляло позицией массы, которая двигается на системе опор низкого трения. От таких машин часто требуется выполнять операции точно заданного позиционирования при высокой частоте повторений и с пренебрежимо малой случайной погрешностью. В таких машинах преимущество перед другими типами исполнительных органов имеют электромагнитные цилиндры, поскольку они в силу своей природы просты по конструкции, имеют нулевой свободный ход и нулевое запаздывание управления транспортировкой. Эти ценные свойства позволяют электромагнитному исполнительному органу создавать быстрое движение с чрезвычайной точностью и надежностью. Возможно прикладывать усилия более 20 тонн (200 кН) при скоростях, исчисляемых метрами в секунду, с точностью позиционирования в единицы микрометров.
Такие устройства применяются также, например, в имитаторах для тренировок или развлечения. Обычно в таких случаях применения некую платформу перемещают относительно неподвижной конструкции, чтобы вызвать ощущение непрерывного движения у людей, занимающих капсулу, которая закреплена на этой подвижной платформе. Такие механизмы применяют также при испытании систем подвески и стабилизирующих устройств - в подобных случаях подвижную платформу используют для создания калиброванных возмущающих ускорений, на устойчивость к которым необходимо испытать стабилизирующий механизм.
Подвижная платформа устройства для сообщения движения обычно приводится несколькими исполнительными органами или "силовыми цилиндрами", которые могут действовать от гидравлической жидкости или газа под давлением, или же подобными цилиндрам устройствами с электрическим приводом и шариковым винтовым механизмом. Недавно было разработано устройство, использующее кривошип, соединенный через понижающую передачу с вращательным двигателем, или прямое электромагнитное взаимодействие между подвижным якорем в форме поршня и цилиндрическим статором. В случае применения таких электрических и электромагнитных машин на устройствах для сообщения движения возникает необходимость какими-то средствами поддерживать капсулу с ее обитателями против действия гравитационных сил. Это важно, поскольку в противном случае в электрической машине будет постоянно расходоваться энергия, чтобы создавать усилие, необходимое для противодействия постоянной гравитационной силе, воздействующей на капсулу. Это быстро вызовет перегрев двигателя. С таким же эффектом сталкиваются и в других случаях применения.
Одна попытка решить эту проблему описана в Международной заявке, опубликованной под номером WO 93/01577. Этот документ описывает техническое устройство, которое несет нагрузку от подвижной платформы на механизме уравновешивания, имеющем низкую эффективную жесткость упругих элементов. В качестве конкретного примера в нем описана система коленчатых газовых рессор. Опыт работы с механизмами, сконструированными согласно рекомендациям WO 93/01577, показал, что описанный там принцип уравновешивания не обеспечивает оптимальной поддержки для электромагнитной базы движения. Настоящее изобретение в одном из своих аспектов исходит из понимания, что для оптимальной поддержки требуется управляемая рессора (или набор управляемых рессор) со значительной жесткостью.
К настоящему времени было создано много электромагнитных исполнительных органов или линейных двигателей. Различные конфигурации известных машин были описаны в документах, таких, например, как WO 93/01646, который раскрывает электромагнитное устройство, выполненное так, чтобы работать с цилиндрической симметрией как поршневая машина. Принципиальное достоинство такого типа конструкции состоит в том, что большие силы притяжения между постоянными магнитами внутри машины и окружающими их магнитными материалами уравновешены относительно центральной оси, так что опорам машины не нужно воспринимать сколько-нибудь значительные магнитные силы. Дальнейшее достоинство цилиндрической конструкции состоит в том, что магнитные поля машины заключены внутри наружного стального кожуха исполнительного органа или цилиндра и что они могут быть организованы так, чтобы пересекать витки электрических катушек машины с высокой степенью эффективности.
Еще одно достоинство цилиндрической конструкции состоит в том, что якорь цилиндра может иметь скользящее уплотнение между собой и внутренней поверхностью статора цилиндра, чтобы образовать поршень гидравлического или пневматического исполнительного устройства. Это выгодно, когда необходимо создавать быстродействующие электромагнитные силы, наложенные на постоянные или медленно изменяющиеся усилия или перемежающиеся с ними. Усилия последнего типа лучше создавать посредством гидравлического или пневматического исполнительного органа. В противном случае электромагнитные элементы будут непрерывно потреблять электрическую энергию, если они должны сами обеспечивать статическое или медленно изменяющееся усилие.
Далее, цилиндрические поршневые конструкции пригодны для применения в качестве цилиндров во многих вариантах промышленного использования для управления, где сейчас применяются гидравлические или пневматические цилиндры. Это объясняется тем, что магнитное поле такого цилиндра полностью заключено внутри цилиндрической оболочки, так что цилиндр спокойно переносит присутствие металлической стружки или другой магнитной пыли, которое составляет проблему для других типов электромагнитных линейных исполнительных органов.
Настоящее изобретение имеет целью предложить конструкцию, в которой полость цилиндрического статора электромагнитного исполнительного органа разделена на две части уплотнением на поршневом (якорном) элементе и включает в себя средство, с помощью которого узел якоря может также действовать как создающий силу элемент системы, управляемый давлением текучей среды, например как часть газовой рессоры.
Необходимо отметить, что заявка WO 93/01646 и связанная с ней одновременно рассматриваемая заявка WO 93/01577 описывают конструкцию цилиндра для применения в машинах типа базы движения, где способность цилиндра выполнять функции газовой рессоры рассматривается как действующая только в одну сторону, например для поддержания груза, то есть восприятия гравитационной силы. С этой целью заявка WO 93/01646 описывает конструкцию подвода для соединения потока текучей среды только от одной части цилиндра толкателя (а именно от полости под поршнем) с резервуаром текучей среды, находящейся под давлением, который образует часть газовой рессоры. В обеих заявках WO 93/01646 и WO 93/01577 указано, что верхняя часть цилиндра имеет возможность сообщаться с атмосферным давлением напрямую или через выпускной резервуар.
Желательно иметь более эффективный способ управления движением исполнительного органа имитационного механизма, чем по заявке WO 93/01577, использующий сочетание давления воздуха и электромагнитных сил, в котором отдельные усилия и градиенты усилий газовых рессор оптимизированы по отношению к размерам груза так, чтобы потребление механизмом энергии было минимальным. С этой целью газовые рессоры, действующие под поршнем каждого цилиндра, должны быть сконструированы не только для поддержания груза, как в заявке WO 93/01577, но должны функционировать как временные резервуары, в которых накапливается потенциальная энергия, образующаяся в результате электромагнитного действия цилиндров, и откуда она может быть вновь отобрана через короткое время. Этот метод повторного использования энергии приводит к экономии потребляемой мощности, что улучшает характеристики и снижает затраты на создание и работу электромагнитного исполнительного органа.
Итак, в одном аспекте настоящее изобретение имеет целью предложить систему сообщения движения, в которой постоянная составляющая нагрузки воспринимается особенно эффективным образом. Особенностью вариантов осуществления данного изобретения является то, что при применении к так называемым базам движения они имеют форму, которая легко приспосабливается для поддержания капсул различной формы, которая физически устойчива и прочна, которая имеет улучшенные возможности создания больших углов "килевой качки" и "бортовой качки" (т.е. продольного и поперечного углового колебательного движения) и которая легко доступна для контроля и обслуживания.
Согласно одному аспекту настоящего изобретения предложено устройство для сообщения движения грузу, включающее в себя средство для приложения возмущающей силы к грузу и податливую опору для груза, в котором предусмотрено средство для выполнения динамических вариаций податливости опоры во время работы устройства.
В одном варианте осуществления изобретения средство для приложения силы представляет собой электромагнитный исполнительный орган. Для многих случаев применения линейный электромагнитный исполнительный орган может оказаться предпочтительным, хотя альтернативно может быть использован и вращательный исполнительный орган.
В любом таком случае вариацией податливости можно управлять с помощью сигналов, генерируемых как интеграл от сигнала ошибки, подаваемого к электромагнитному исполнительному органу.
С этой целью предпочтительно, чтобы вариация податливости управлялась в зависимости от силы электрического тока, необходимой для перемещения электромагнитного исполнительного органа против направления действия нагрузки.
Податливое средство может представлять собой газовую рессору, а вариация податливости может быть достигнута путем варьирования массы газа, заключенного внутри камеры переменного объема.
Такая вариация может быть достигнута путем управления клапанами, которые пропускают газ в указанную камеру и (или) из нее.
Альтернативно, податливая опора может включать в себя исполнительный орган, работающий на текучей среде, например гидравлический исполнительный орган, рабочую жидкость которого можно направлять к исполнительному органу или от него с целью варьирования его податливости.
Вариация податливости может быть достигнута, например, регулировкой давлений в отдельных газовых рессорах. В одном варианте осуществления изобретения это выполняется в соответствии с интегралом по времени сил тока, потребляемого электромагнитным исполнительным органом во время движения. Посредством этого характеристики податливого опорного средства оптимизированы так, чтобы позволить электромагнитным цилиндрам работать в пределах своих номиналов и снизить мощность, потребляемую механизмом в целом.
В одном варианте осуществления настоящего изобретения, включающем в себя электромагнитный исполнительный орган, якорь и статор электрической машины содержат устройство типа "поршень в цилиндре", этот поршень или якорь короче в длину, чем цилиндр или статор, и все время полностью заключен внутри него, цилиндр закрыт с обоих концов концевыми элементами, поршень снабжен штоком или толкающим элементом, выходящим через по крайней мере один из концевых элементов, причем указанный концевой элемент (элементы) снабжен уплотнением (уплотнениями) для воздуха, якорный или поршневой элемент также снабжен уплотнением для воздуха, предназначенным, чтобы разделить цилиндр на две камеры, якорь включает в себя первое средство для создания картины магнитного поля, содержащей по крайней мере два магнитных полюса противоположной полярности, а если больше, чем два полюса, тогда содержащей магнитные поля, организованные так, чтобы иметь меняющуюся полярность вдоль по крайней мере части осевой длины якоря, а статор снабжен вторым средством для создания дальнейшей картины магнитного поля с по крайней мере двумя полюсами противоположной полярности, а если больше, чем два магнитных полюса, тогда полюса организованы так, чтобы иметь меняющуюся полярность вдоль по крайней мере части осевой длины статора, причем вторая картина поля организована так, чтобы взаимодействовать с первой картиной магнитного поля с целью создания аксиально направленной силы.
Предпочтительно физические и электрические параметры устройства подобраны так, что электрические выводы могут быть присоединены к одному или более обыкновенным электронным блокам возбуждения для управления фазой и амплитудой по крайней мере одной из картин магнитного поля с целью вызвать создание желаемой аксиально направленной электромагнитной силы между поршнем и статором.
Предпочтительно две камеры, расположенные по одной с каждой стороны поршня и имеющие объем, варьирующий в соответствии с положением поршня в цилиндрическом статоре, снабжены подсоединениями для труб, чтобы можно было управлять массой текучей среды внутри них. Это позволяет цилиндру работать одновременно как электромагнитному устройству и как силовому цилиндру двойного действия.
Согласно другому аспекту настоящего изобретения, предложено устройство для управления относительным движением с несколькими степенями свободы платформы относительно отсчетной плоскости, содержащее податливое средство для поддержания веса платформы, один или более исполнительных органов для приложения возмущающих сил между платформой и отсчетной плоскостью и управляющее средство для управления одним или каждым исполнительным органом с целью перемещения в том или ином направлении и тем самым смещения платформы относительно отсчетной плоскости, отличающееся тем, что податливость податливого опорного средства переменна, а также тем, что предусмотрено средство для динамического варьирования его податливости в зависимости от управляющих сигналов, поданных к нему.
В вариантах осуществления изобретения, оформленных как база движения, могут использоваться три исполнительных органа между подвижной платформой и неподвижной отсчетной плоскостью, которая может быть неподвижной частью механизма. Исполнительные органы имеют шарниры или проушины, присоединяющие их к той части устройства, которая определяет неподвижную отсчетную плоскость так, чтобы замкнуть область движений исполнительного органа в соответствующей плоскости. Определенные таким образом три плоскости пересекаются по вертикальной линии, соединяющей центроид нижнего треугольника, образованного шарнирами исполнительных органов, с центроидом треугольника подвижной платформы, образованного точками присоединения верхних концов исполнительных органов. Верхние концы исполнительных органов имеют присоединения, обеспечивающие универсальную подвижность, так что, выбирая три отдельные длины исполнительных органов, можно заставить платформу принять любое выбранное положение в разумных пределах движений "вертикальной качки" (т.е. линейных колебаний по вертикали), "килевой качки" и "бортовой качки". Центр масс груза преимущественно позиционируют так, чтобы он лежал над центроидом подвижной платформы и близко к нему, причем платформа имеет опорный элемент, присоединенный с универсальной подвижностью между центроидом нижнего неподвижного треугольника и центроидом верхнего (подвижного) треугольника, причем податливость опорного элемента оптимизирована согласно размерам подвижной платформы.
В предпочтительном варианте компоновки верхний подвижный треугольник, образованный концами исполнительных органов, меньше по размеру, чем соответствующий треугольник на неподвижной части механизма, определяющей отсчетную плоскость, чтобы дать возможность исполнительным органам с ограниченным ходом создавать приемлемые отклонения подвижной платформы в продольном и поперечном колебаниях и упростить решение проблем прикрепления капсулы к подвижной платформе.
Предпочтительно угол между исполнительным органом и горизонтальной плоскостью при прямом и горизонтальном (рабочем) положении подвижной платформы составляет приблизительно 45°. Центральная опора может быть простой деталью или сборочной единицей и может представлять собой металлическую или пластмассовую пружину, пневматический цилиндр или цилиндр, в котором жидкость действует на поршень в исполнительном органе, причем на поверхность жидкости, удаленную от поршня, воздействует давление газа внутри резервуара.
Альтернативно податливая опора может представлять собой сильфон, с тем преимуществом, что на стыках сильфона с неподвижной и подвижной платформами не требуются универсальные шарниры и что длина сильфона в сжатом состоянии может быть меньше, чем половина его длины в раздвинутом состоянии. Далее, для сильфона не требуется внутреннее скользящее уплотнение, как для скользящего поршня. Как другая альтернатива или же дополнительно центральная опора может быть образована несколькими заполненными сжатым газом (пневматическими) стойками, расположенными так, чтобы обеспечить над центром перекладку усилий, которая устраняет большую часть поддерживающей силы, когда подвижная платформа опускается на минимальную высоту или в положение погрузки.
Предпочтительно исполнительные органы представляют собой электромагнитные исполнительные органы и сконструированы так, чтобы иметь достаточный резерв усилия и иметь возможность приспосабливаться к практическим отклонениям позиции центра масс подвижной платформы от идеальной позиции, близкой к точному центроиду верхнего подвижного треугольника.
Понятно, что когда система сообщения движения (здесь и далее именуемая "база движения") находится в работе, существует центральное, прямое и горизонтальное положение, к которому капсула должна постоянно возвращаться. Лицо или лица, находящиеся в закрытой капсуле, не осознают этого постоянного возврата к центру, который тщательно контролируется, чтобы завуалировать его на фоне прочих движений. Для возврата капсулы в ее исходное положение расходуется столько же энергии, сколько для предшествующего вывода ее из этого положения, и эта энергия может быть сохранена в упругой системе. Далее, поскольку центр масс полезного груза неизменно находится над центроидом подвижной платформы, существует значительный крутящий момент, который помогает любому движению в направлении "килевой" или "бортовой качки", и ему приходится противодействовать каким-то средством, например, упругим действием. Тем не менее восстанавливающие силы, создаваемые упругой подвеской, не должны быть слишком большими, иначе они потребуют непропорционально больших усилий на исполнительных органах, чтобы вызвать начальные смещения.
Когда делались попытки применить принципы заявки W093/01577 к обычной форме платформы с шестью цилиндрами и движением по шести осям (называемой "Платформа Стьюарта" [Stewart] по фамилии ее разработчика), возник ряд трудностей. В частности, было показано, что, если статическая нагрузка превышает некоторый строго определенный предел, зависящий от ее высоты над центроидом подвижной платформы, механизм имеет тенденцию "клевать носом" в смешанном движении вперед и продольном наклоне, из чего он не может быть выведен действием одних только электромагнитных сил. Этот недостаток накладывает строгое ограничение на полезную грузоподъемность, а следовательно, и практические возможности машины.
Вследствие описанного, в другом аспекте настоящее изобретение предлагает систему сообщения движения, имеющую шесть степеней свободы и использующую шесть исполнительных органов, расположенных как впервые описано Стьюартом, в которой концепция, описанная в Международной заявке WO 93/01577, а именно система уравновешивания веса, не применена, но в которой силы для поддержания статического груза прикладываются другим, специфическим и эффективным способом, который значительно снижает требуемую электромагнитную мощность на исполнительных органах для любой данной полезной нагрузки, тем самым повышая предел полезной нагрузки и улучшая динамические характеристики устройства.
Согласно другому аспекту настоящего изобретения, в соответствии со сказанным, предложено устройство для управления относительным движением в нескольких степенях свободы подвижной платформой относительно отсчетной плоскости, содержащее средство для поддержания веса подвижной платформы, один или более исполнительных органов для приложения прерывистых или возмущающих сил между подвижной платформой и отсчетной плоскостью, и управляющее средство для управления этим или каждым исполнительным органом, чтобы тем самым изменять положение и (или) ориентацию платформы относительно отсчетной плоскости, отличающееся тем, что средство для поддержания веса подвижной платформы содержит соответственные податливые опорные элементы, каждый из которых связан с соответственным указанным исполнительным органом.
В настоящем изобретении, в идеализированном варианте платформы Стыоарта, три точки подвижной платформы, которые лежат на треугольнике, соединены с тремя соответствующими точками, определяющими треугольник на той части механизма, которая определяет отсчетную плоскость, посредством шести электромагнитных исполнительных органов, имеющих шарниры, обеспечивающие универсальную подвижность, в местах соединения между исполнительными органами и неподвижной платформой и подобные же шарниры между исполнительными органами и подвижной платформой, так что, выбирая шесть индивидуальных длин исполнительных органов, можно двигать подвижную платформу так, чтобы сообщать ей разную ориентацию в широком диапазоне движения, которое может быть одним из или любым сочетанием нижеперечисленных движений, известных под названиями "вертикальная качка", "продольный снос" (линейные колебания в продольном направлении), "поперечный снос" (линейные колебания в поперечном направлении), "рыскание" (угловые колебания в горизонтальной плоскости), "килевая качка" и "бортовая качка". Центр масс груза преимущественно размещен так, чтобы лежать над центроидом подвижной платформы и близко к нему, а диаметр окружности подвижной платформы преимущественно имеет оптимальное отношение к диаметру окружности неподвижной отсчетной плоскости. Здесь термин "окружность" платформы или плоскости означает окружность, описанную вокруг точек присоединения концов исполнительных органов к платформе или отсчетной плоскости. Каждый электромагнитный цилиндр может быть связан с отдельной рессорой или может быть так сконструирован и собран с базой движения, чтобы действовать также как выводной исполнительный орган отдельной рессоры, а рессоры выполнены так, чтобы поддерживать вес подвижной платформы (и любого груза на ней) в центральном прямом и горизонтальном положении.
Особенностью настоящего изобретения является то, что жесткости рессор оптимизированы по мощности, потребляемой устройством, и силы, создаваемые каждой отдельной рессорой, преимущественно можно регулировать с помощью следящей системы так, чтобы снизить до нуля интеграл сил тока в связанных исполнительных органах на протяжении выбранного интервала времени.
Преимущественно верхняя подвижная окружность меньше, чем соответствующая окружность на неподвижной части механизма, определяющей отсчетную плоскость, и соотношение двух радиусов выбрано так, чтобы оптимизировать потребляемую мощность. Оптимальное соотношение базовых размеров близко к 1:1,5.
Преимущественно фактические значения двух радиусов выбраны так, чтобы угол между исполнительными органами и горизонтальной плоскостью составлял приблизительно 45 градусов, когда все шесть исполнительных органов выдвинуты на 50%.
Если использована подвеска на пневматических рессорах, то предпочтительно отношение запертого объема каждой пневморессорной системы, когда исполнительный орган полностью раздвинут, к запертому объему, когда исполнительный орган полностью вдвинут, также выбрано так, чтобы минимизировать потребление устройством рабочей мощности. Мы считаем, что оптимальное соотношение объемов пневматической рессоры должно быть близко к 1,8.
Преимущественно предусмотрено средство для слежения за величиной и направлением потребляемого электрического тока для каждого исполнительного органа и организована частая регулировка давления в каждой пневматической рессоре во время работы в зависимости от тока, чтобы поддерживать интегральную симметрию потребляемой электрической мощности на протяжении выбранного периода времени.
В вариантах осуществления настоящего изобретения три точки подвижной платформы могут быть соединены с тремя соответствующими точками на неподвижной части механизма, определяющей отсчетную плоскость, исполнительными органами, имеющими универсальную подвижность в соединениях исполнительных органов с отсчетной плоскостью и с подвижной платформой, так, чтобы путем выбора индивидуальных длин этих трех цилиндров можно было двигать платформу и она занимала любое выбранное положение в движениях вертикальной, килевой и бортовой качки. Центр масс груза преимущественно размещен так, чтобы лежать над центроидом подвижной платформы и близко к нему и преимущественно имеет опорный элемент, присоединенный с универсальной подвижностью между центроидом отсчетной плоскости и центроидом подвижной платформы. В этом контексте считается, что центроид платформы или плоскости представляет собой центроид окружности, описанной вокруг треугольника, определенного тремя точками подсоединения трех (или шести) исполнительных органов. Жесткость опоры преимущественно оптимизирована по параметрам платформы и груза.
В предпочтительном варианте осуществления изобретения окружность, описанная вокруг треугольника подсоединении исполнительных органов к подвижной платформе, меньше по размеру, чем соответствующая окружность, описанная вокруг треугольника на неподвижной части механизма, определяющей отсчетную плоскость, чтобы позволить цилиндрам исполнительных органов с ограниченным ходом создавать приемлемые отклонения верхней платформы при килевой и бортовой качке и упростить проблемы присоединения капсулы к подвижной платформе. Предпочтительно отношение этого размера неподвижной (базовой) платформы, определяющей отсчетную плоскость, к размеру подвижной платформы составляет приблизительно 1,5:1.
Предпочтительно угол между исполнительными органами и горизонтальной плоскостью, когда все три исполнительных органа находятся в положении, соответствующем прямой и горизонтальной (рабочей) позиции подвижной платформы, составляет приблизительно 45°.
Предпочтительно центральная опора представляет собой сильфонный блок. Это имеет то преимущество, что верхний и нижний концы сильфона могут быть прикреплены прямо к подвижной платформе и к неподвижной базе, определяющей отсчетную плоскость. Длина сильфона в сжатом состоянии может быть меньше, чем половина его длины в раздвинутом состоянии, и для него не требуется внутреннее скользящее уплотнение. Понятно, что одной из особенностей сильфонного узла является то, что при прямой, т.е. вертикальной, ориентации оси он допускает вертикальное движение, и верхний конец сильфона может быть наклонен на любой продольный угол (угол тангажа) или поперечный угол (угол крена) относительно нижнего конца, но с трудом допускает горизонтальное перемещение (продольный или поперечный снос) и совсем не допускает поворота вокруг оси (рыскания). Следовательно, сильфонный узел может функционировать и как блок пневматической рессоры, и как ограничительный механизм.
Предпочтительно исполнительные органы представляют собой электромагнитные цилиндры, сконструированные так, чтобы иметь достаточный резерв усилия и иметь возможность приспосабливаться к практическим отклонениям позиции центра масс подвижной платформы от идеальной позиции, близкой к точному центроиду верхнего подвижного треугольника.
Различные варианты осуществления настоящего изобретения описаны более конкретно на примерах, со ссылками на прилагаемые чертежи, где:
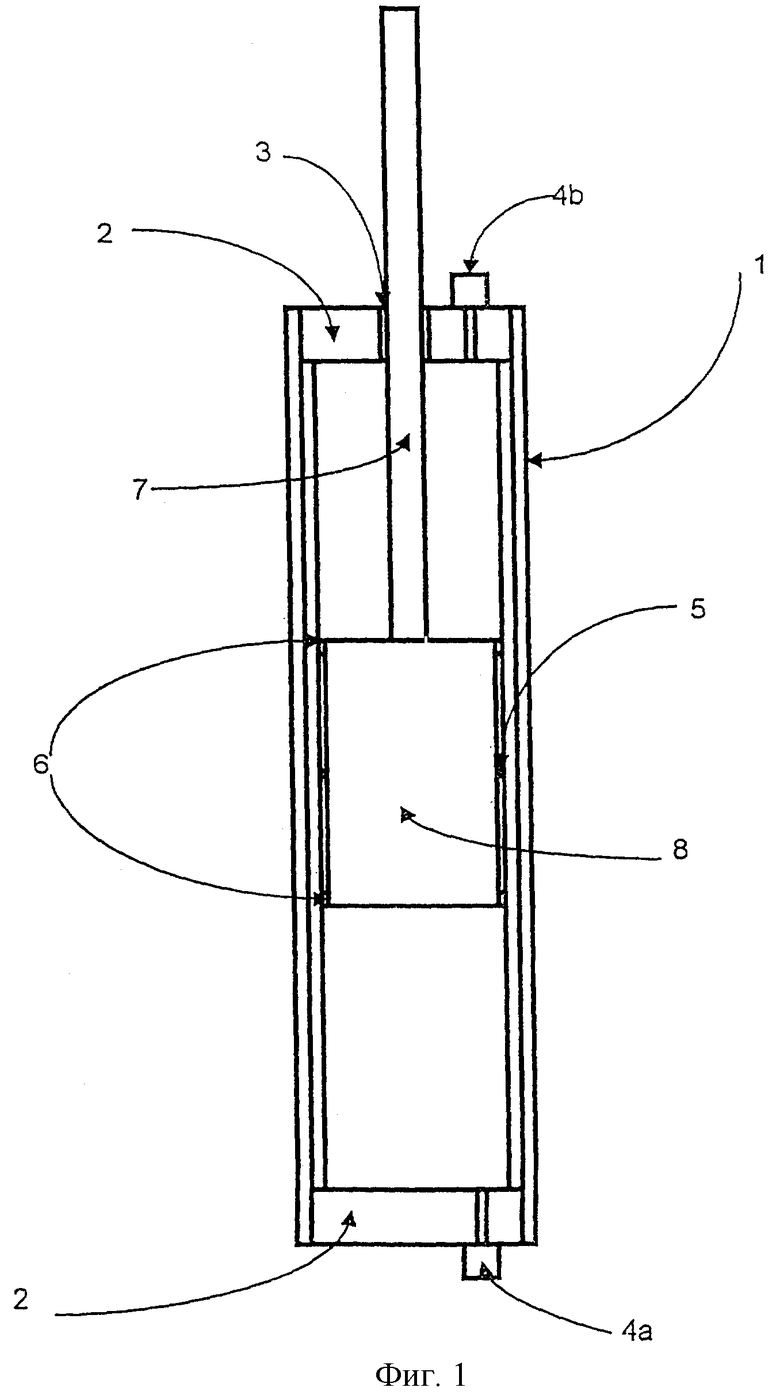
Фиг.1 представляет собой вид в разрезе по оси исполнительного органа, выполненного как один вариант осуществления настоящего изобретения;
Фиг.2 представляет собой схематическое изображение исполнительного органа с управляющими компонентами, выполненного как второй вариант осуществления настоящего изобретения;
Фиг.3 представляет собой схематическое изображение альтернативного варианта конфигурации управления для исполнительного органа;
Фиг.4 представляет собой схему, иллюстрирующую дальнейшую конфигурацию управления;
Фиг.5 представляет собой схематическое перспективное изображение известной конфигурации устройства для сообщения движения;
Фиг.6 представляет собой схематическое перспективное изображение альтернативной конфигурации устройства для сообщения движения, известного из аналогов;
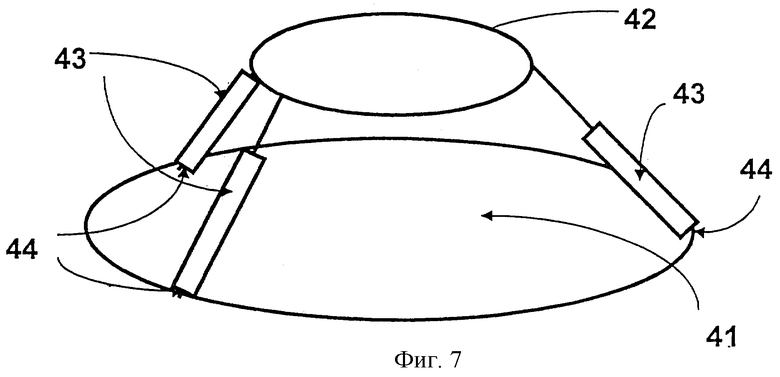
Фиг.7 представляет собой схематическое перспективное изображение устройства для сообщения движения, выполненного в соответствии с принципами настоящего изобретения;
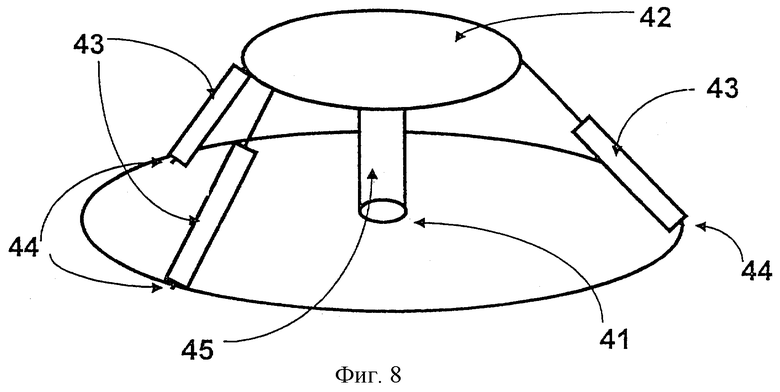
Фиг.8 представляет собой схематическое перспективное изображение дальнейшего варианта осуществления настоящего изобретения;
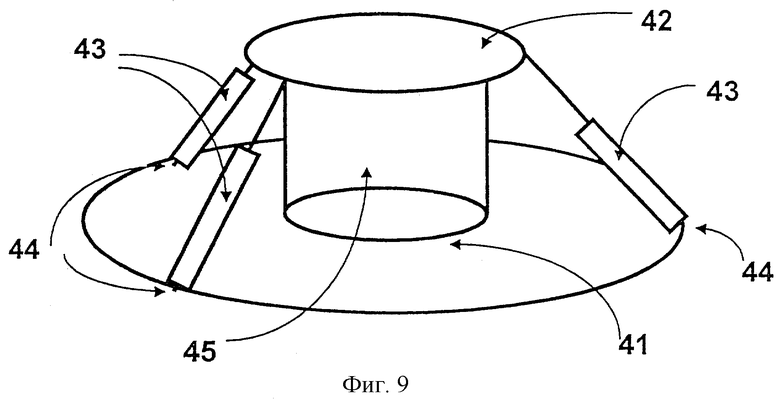
Фиг.9 представляет собой схематическое перспективное изображение дальнейшего варианта осуществления настоящего изобретения;
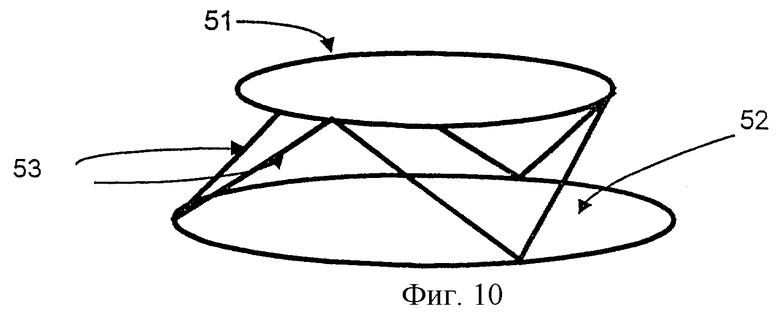
Фиг.10 представляет собой упрощенную схему платформы Стьюарта, выполненной как дальнейший вариант осуществления настоящего изобретения;
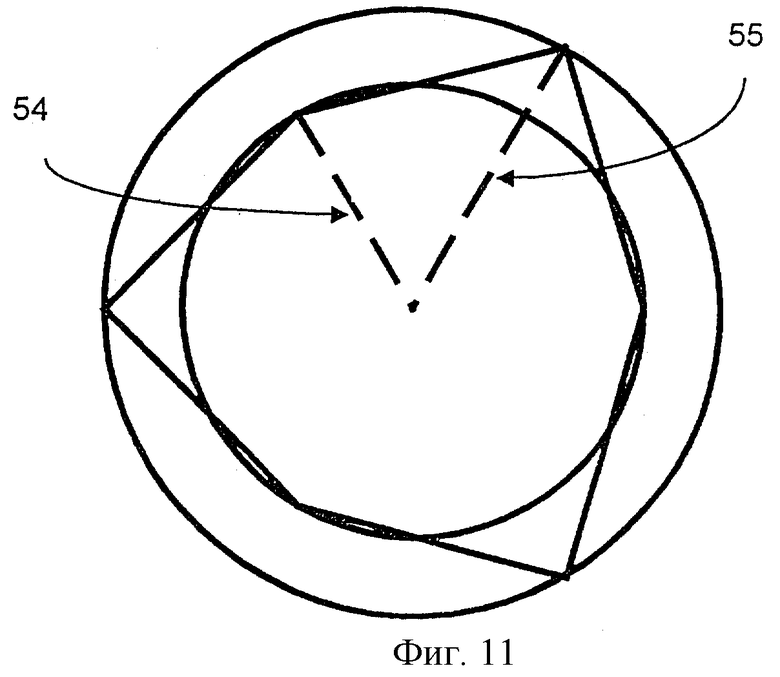
Фиг.11 представляет собой изображение в плане (вид сверху) платформы, показанной на фиг.10;
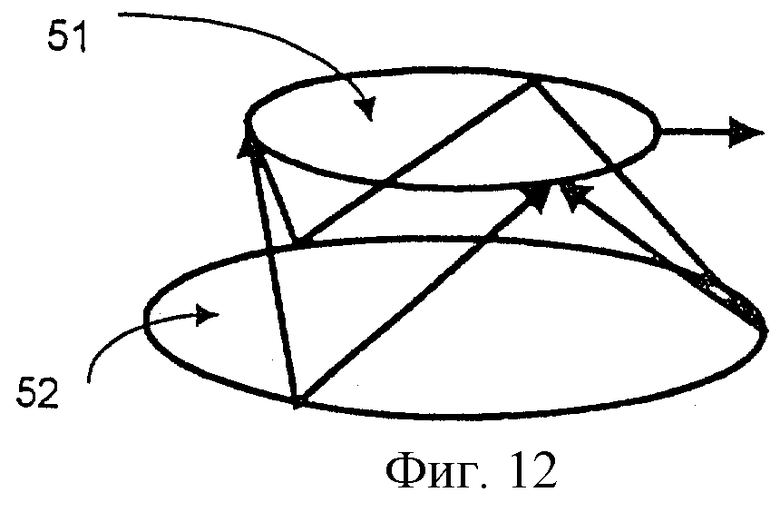
Фиг.12 представляет собой схематическое изображение варианта осуществления с фиг.10, показанного в первой рабочей конфигурации;
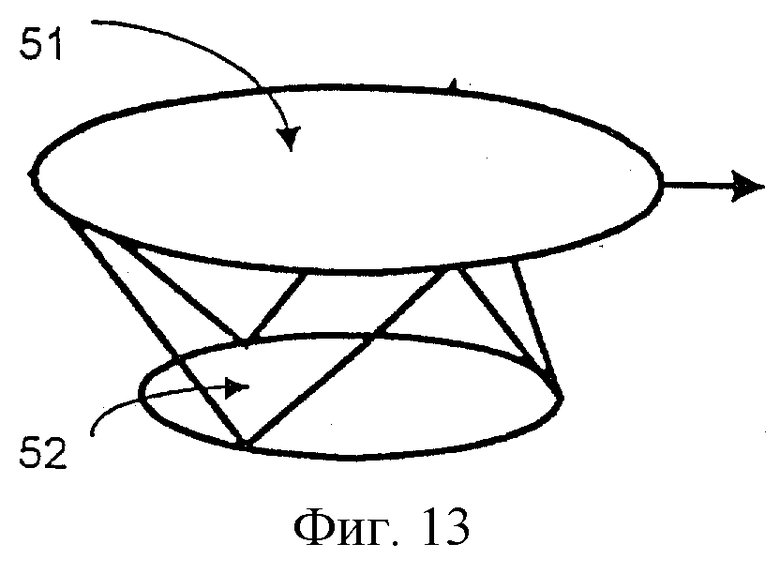
Фиг.13 представляет собой схематическое изображение дальнейшего варианта осуществления, в котором отсчетная плоскость меньше, чем подвижная платформа;
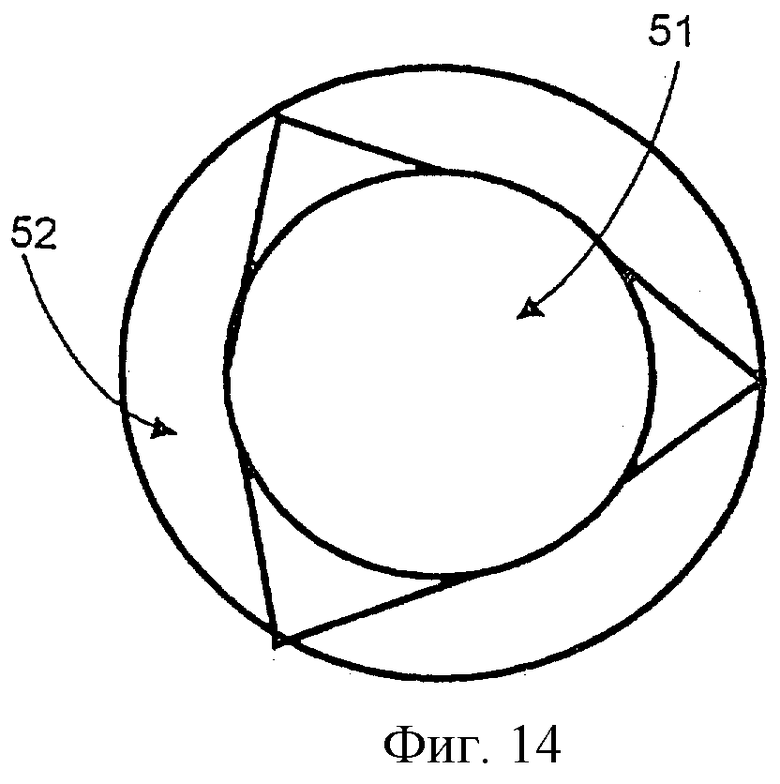
Фиг.14 представляет собой изображение в плане (вид сверху) варианта осуществления, показанного на фиг.12;
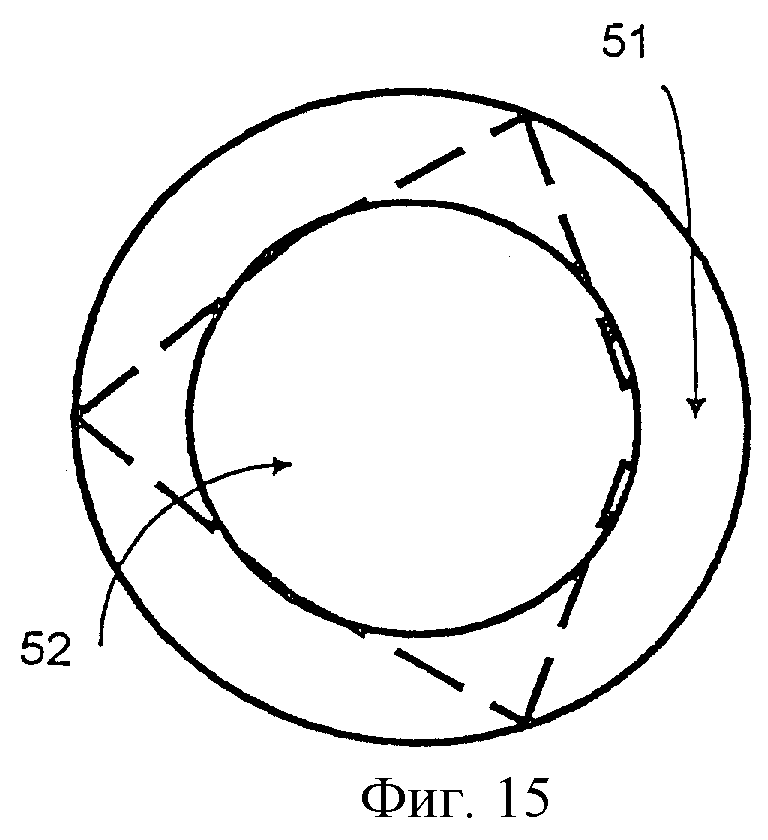
Фиг.15 представляет собой изображение в плане (вид сверху) варианта осуществления, показанного на фиг.13;
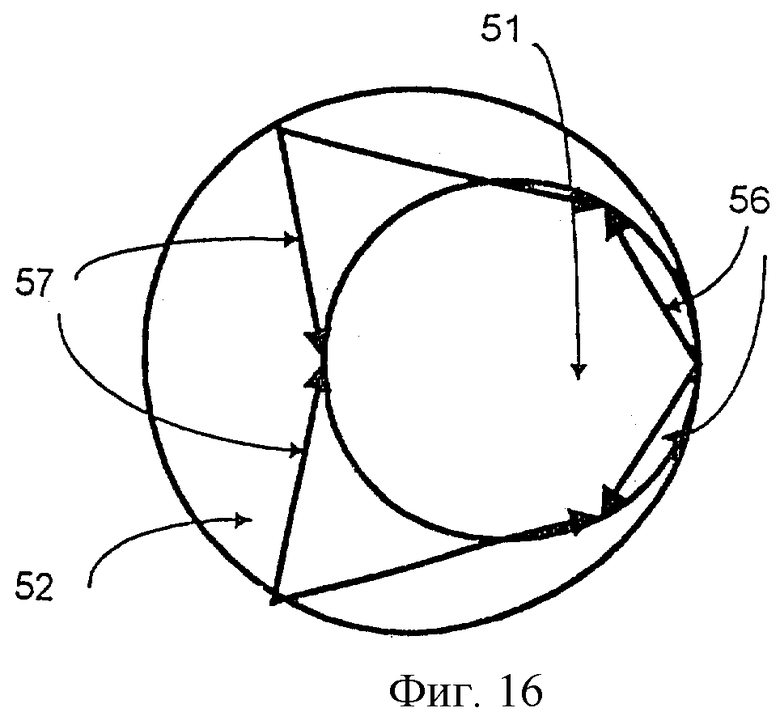
Фиг.16 представляет собой изображение в плане (вид сверху) варианта осуществления с фиг.12, показанного с подвижной платформой, смещенной вправо;
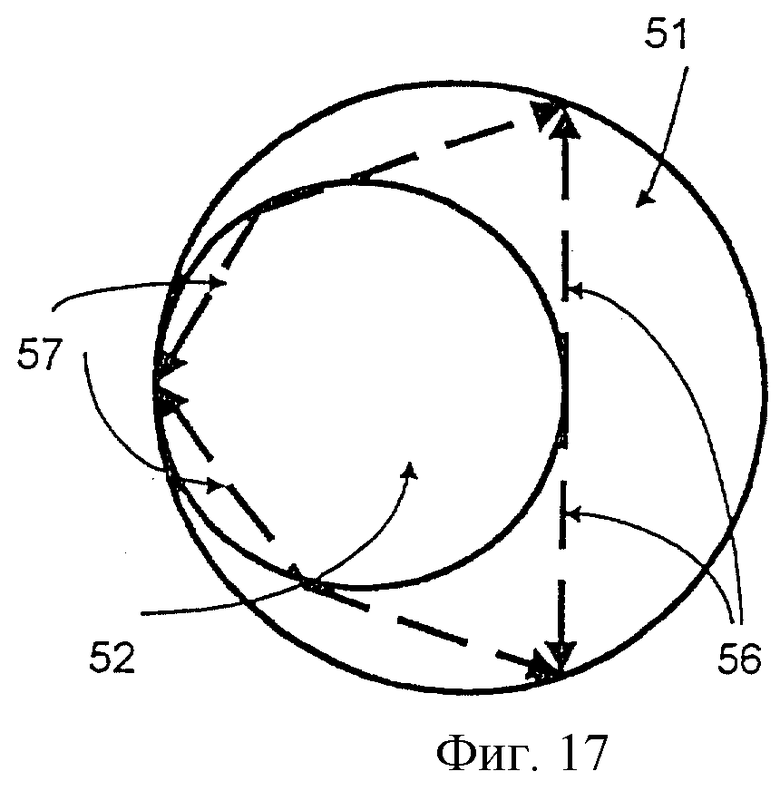
Фиг.17 представляет собой изображение в плане (вид сверху) варианта осуществления с фиг.13, показанного с подвижной платформой, смещенной вправо, с позициями, соответствующими конфигурации, показанной на фиг.15;
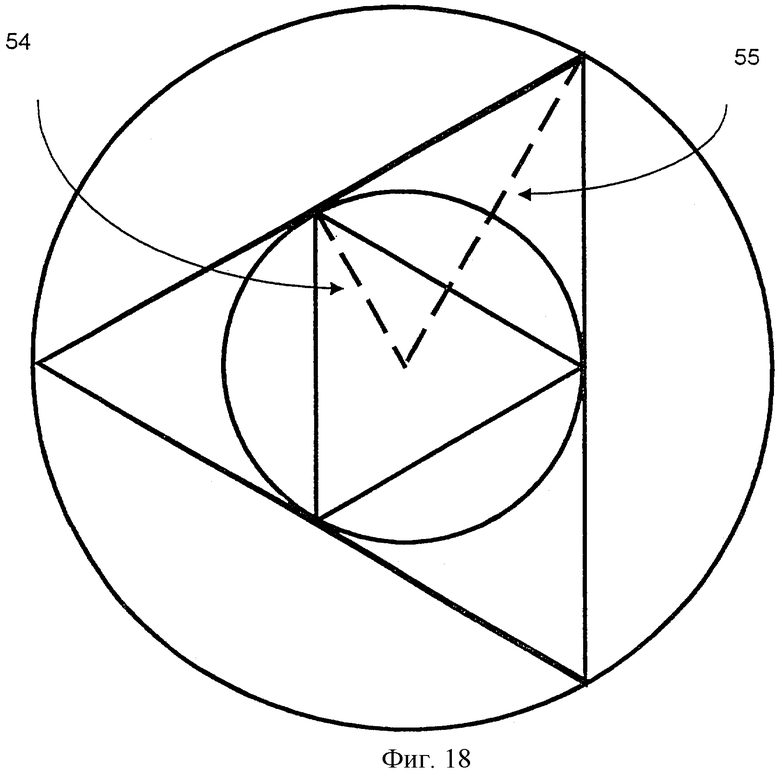
Фиг.18 представляет собой схематическое изображение в плане, иллюстрирующее предполагаемые оптимальные размеры платформы Стьюарта, выполненной как вариант осуществления настоящего изобретения;
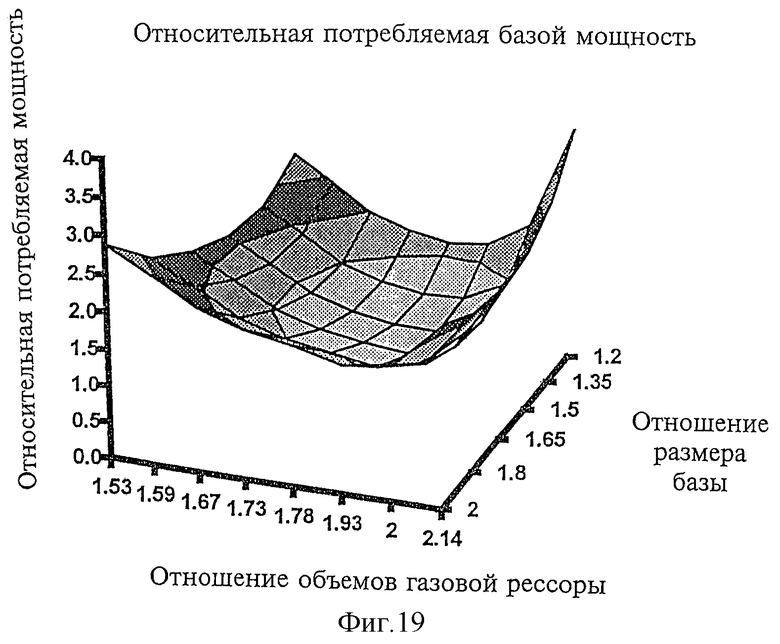
Фиг.19 представляет собой трехмерную диаграмму потребления мощности устройством для сообщения движения типа платформы Стьюарта, выполненной как вариант осуществления настоящего изобретения;
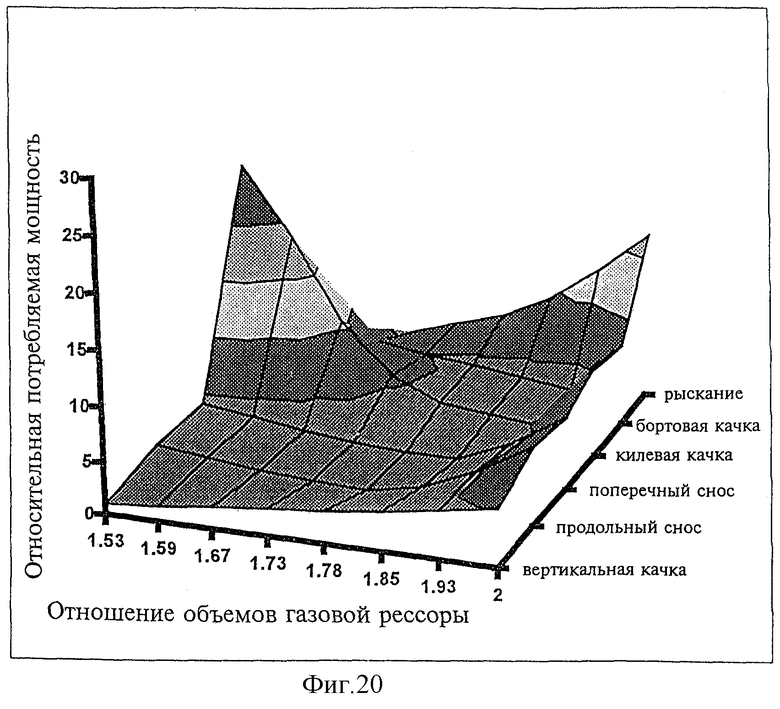
Фиг.20 представляет собой диаграмму, показывающую как потребляемая исполнительными органами мощность меняется в зависимости от типа движения; и
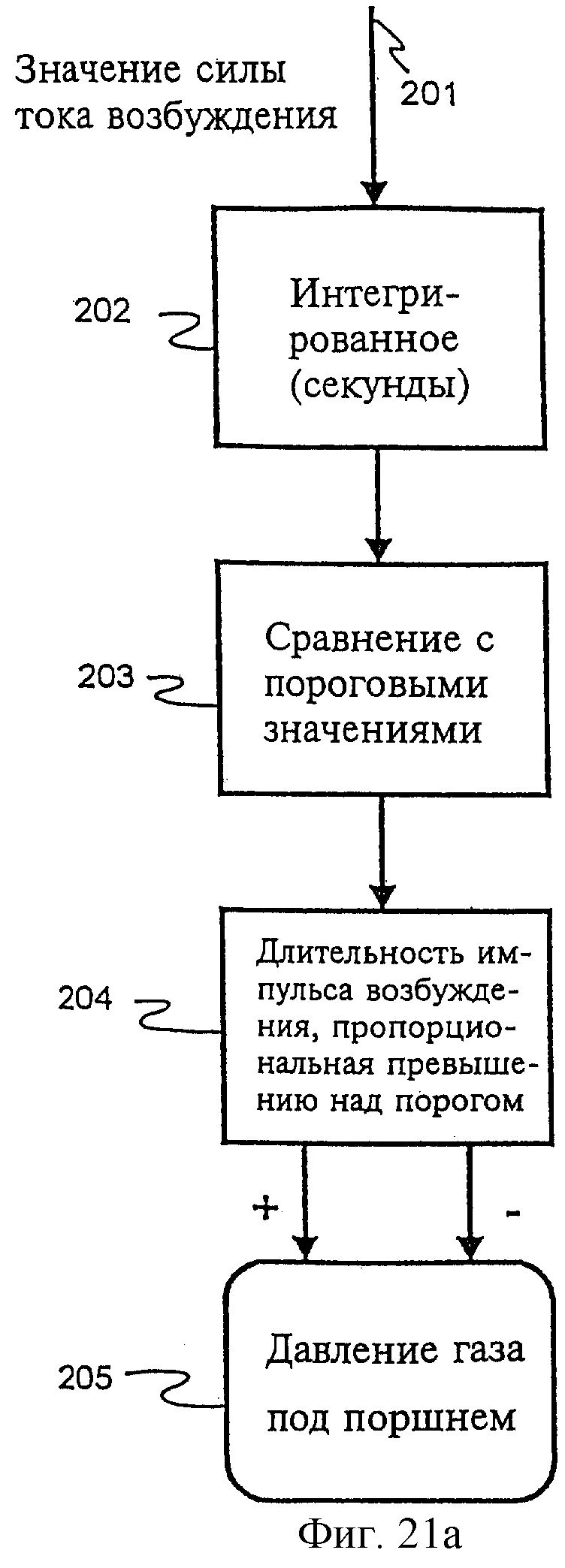
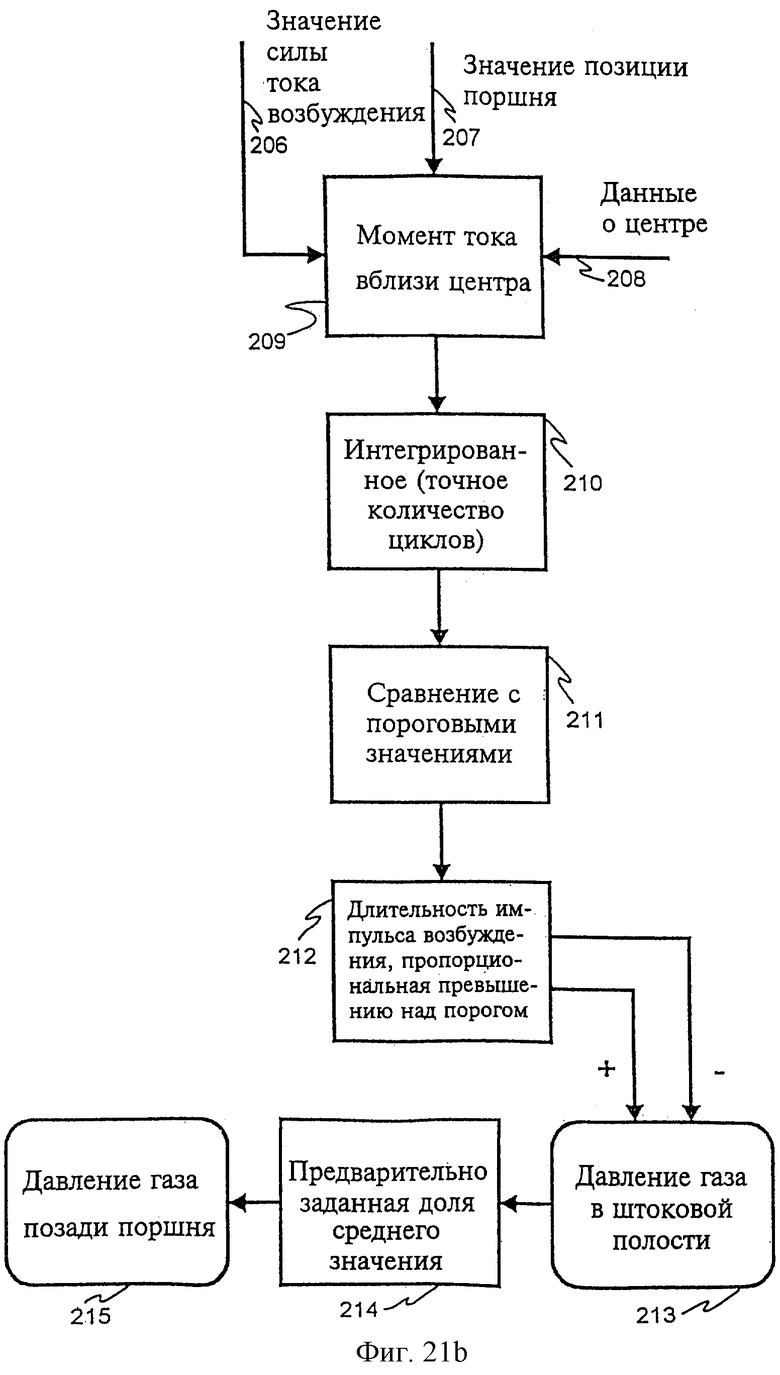
Фиг.21А и 21В представляют собой блок-схемы, иллюстрирующие алгоритмы управления исполнительными органами, выполненными как вариант осуществления настоящего изобретения.
Обратимся теперь к чертежам. Исполнительный орган, изображенный на фиг.1, содержит поршень или якорь 8, двигающийся внутри цилиндра или статора 1. Поршень соединен со штоком или толкающей трубой 7, который проходит сквозь одну из концевых деталей 2, через уплотнение для воздуха 3. Уплотнительное кольцо 5 установлено на поршне 8 так, чтобы разделять цилиндр на две камеры, воздух в которые подается под давлением или удаляется через подсоединения для труб (штуцеры) 4а, 4b. Поршень также снабжен опорными кольцами 6, функция которых состоит в том, чтобы ограничивать позицию поршня таким образом, чтобы он плавно двигался вдоль центральной оси устройства.
Легко понять, что когда окна 4 закрыты, действие воздушного уплотнения 5 будет вызывать движение поршня в цилиндре, сжимая газ в одной из камер и позволяя газу в противоположной камере расширяться. В любом случае будет создана сила, которая стремится вернуть поршень в его заданное положение в отсутствие электрической мощности. Путем регулировки массы газа, запертого в двух камерах, могут быть заранее заданы силы, создаваемые двумя упругими элементами (т.е. газом в двух камерах), а путем выбора соотношения между двумя объемами может быть заранее установлена заданная (или равновесная) позиция (поршня). Когда нужно снизить жесткости газовых упругих элементов до малых значений, конструкция концевых деталей 2 модифицируется, чтобы позволить подсоединение внешнего резервуара к каждой камере.
Средства, с помощью которых можно управлять пневматическими клапанами (не показаны) в трубопроводах, подсоединенных к окнам 4, в соответствии с силой электрических токов, потребляемых цилиндром, когда он приводится блоком возбуждения для циклического или псевдослучайного позиционирования груза, будут описаны ниже. Предусмотрев оборудование для квазинепрерывной регулировки параметров противолежащих газовых упругих элементов, в зависимости от симметрии электрических токов возбуждения в цилиндре можно минимизировать мощность, потребляемую цилиндром, тем самым осуществляя значительное уменьшение его габаритов.
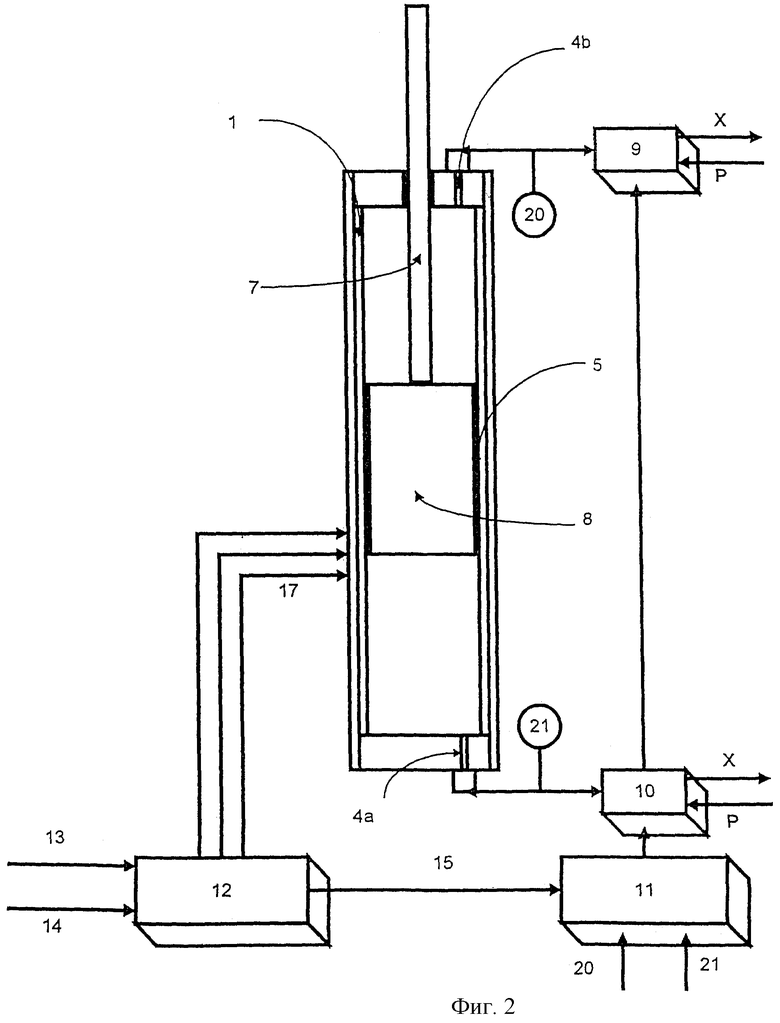
На фиг.2 изобретения показано, когда оно применено в электромагнитном цилиндре. Поршень 8 несет на себе уплотнение 5, которым внутренний объем цилиндра 1 разделен на две камеры А и В. Массой газа в каждой камере управляют клапаны 9 и 10, которые запитываются от блока управления давлением 11. Электромагнитными силами, создаваемыми цилиндром, управляет блок 12, который получает команды позиционирования 13 и позиционные сигналы обратной связи 14 от подходящего датчика (не показан), связанного с выходным штоком цилиндра или толкающей трубой 7. Блок 12 подает мощность к цилиндру по линиям управления 17. Сигнал 15, создаваемый контроллером позиционирования цилиндра 12, является важным параметром процесса, и блок управления давлением 11 сконструирован так, чтобы работать на его основании, - это описано ниже в качестве примера.
Если цилиндр используют как часть базы движения того типа, о котором говорилось выше, объему камеры В (верхняя, т.е. штоковая полость) позволяют оставаться под атмосферным давлением. Клапанный блок 9 отсутствует, окно 4b в камере В устроено так, чтобы иметь большое отверстие, через которое воздух может свободно проходить в окружающее пространство и из него. Фактически цилиндр может быть сконструирован так, чтобы вообще исключить камеру В, имея конфигурацию с открытым концом. Чтобы получить достаточно низкую жесткость (воздушного упругого элемента), может оказаться необходимым соединить камеру А через трубу большого проходного сечения с внешним резервуаром. Подобные же соображения приложимы к промышленным применениям, в которых цилиндр должен нести груз на вертикальной или близкой к вертикали оси, или к другим применениям, таким как подъемники, например.
Тогда контроллер 11 действует через клапанный блок 10 с целью увеличения массы газа в камере А, когда параметр 15 указывает, что ток, потребляемый исполнительным органом, преимущественно протекает в направлении, которое увеличивает объем камеры А, и наоборот. Легко понять, что таким путем пневматическая система снижает до минимума силу тока, потребляемого цилиндром, и увеличивает КПД системы. Легко также понять, что устройство невосприимчиво к утечкам в пневмосистеме в обоих направлениях, к изменениям температуры и к изменениям в рабочем цикле или же к квазислучайной последовательности движений, выполняемых цилиндром. Оно само компенсирует изменения значения статической нагрузки и в любой момент приспосабливается к движению цилиндра в "парковочную" позицию. Математический анализ системы показывает также, что регулировка давления невосприимчива к ошибкам в области окончательного уравновешивания и что замкнутая система автоматического управления весьма стабильна.
Теперь рассмотрим случай, когда цилиндр не испытывает действия постоянной (например, гравитационной) силы, которая стремится уменьшить объем камеры А. Например, цилиндр может быть использован для позиционирования в повторяющихся циклах инертного груза на горизонтальной направляющей, которая имеет малый коэффициент трения.
Тогда контроллер 12 должен вычислять среднюю позицию цилиндра по значениям сигналов 14 от позиционного датчика, усредненных по крайней мере на протяжении одного полного цикла движений, или, в случае псевдослучайного движения, на протяжении значительного интервала времени. Контроллер 12 должен тогда измерять мгновенную силу тока, потребляемого цилиндром, и умножать это значение на расстояние цилиндра от вычисленной средней позиции в это время. Текущая сумма этих произведений (или "токовые моменты") затем передается на контроллер клапана 11 как параметр процесса 15.
Далее контроллер 11 действует так, чтобы увеличить массу газа в камере А, когда параметр 15 указывает, что преобладает потребление тока в направлении силы, которая стремится сдвинуть цилиндр к его центральной позиции, увеличивая объем камеры А. Контроллер 11 устроен так, чтобы снижать массу газа в камере А, если отмечено преобладание противоположной тенденции.
Система устроена так, чтобы давление в камере В было таким, что усилия на двух противоположных сторонах поршня 8 уравновешены, когда цилиндр находится в вычисленной средней позиции.
Как показано на фиг.2, система включает в себя датчики давления 20 и 21, подключенные через тройники к линиям от клапанных узлов 9 и 10 через низкочастотные фильтры (не показаны). Датчик 20 указывает среднее давление в камере В, а датчик 21 указывает среднее давление в камере А. Далее контроллер 11 воздействует на клапаны 9 так, чтобы произведение значения давления 20 на площадь поверхности поршня в камере В равнялось произведению значения давления 21 на площадь поверхности поршня в камере А. Легко понять, что эту функцию уравновешивания можно выполнять более просто, используя диафрагменные пневматические контроллеры давления, имеющие заранее установленное соотношение, что может быть предпочтительным устройством в некоторых вариантах применения машины.
Внешние резервуары, функцией которых является снижение жесткости газовых упругих элементов, могут быть присоединены или не присоединены к камерам А и В, в зависимости от требуемых законов изменения динамических сил в системе.
На фиг.3 показано изобретение в случае применения его в приводе с электрическим линейным двигателем, который не сконструирован в форме, позволяющей прикладывать пневматические силы прямо к выходному органу привода. Например, линейный двигатель может иметь открытую плоскую конфигурацию, использующую якорь с постоянным магнитом и пригодную для соединения с трехфазным сервоприводом. В этом случае линейный двигатель 25 и его выходной элемент 26 присоединены подходящим средством 28 к пневматическому цилиндру 27, имеющему поршень 8 и камеры А и В - и т.д., как описано ранее.
Режим работы тот же самый. Если нагрузка преимущественно постоянная (например, гравитационная), камера В цилиндра 27 (который образует собой выходной элемент газовой рессорной системы), сообщается с атмосферой, а массой газа в камере А управляют так, чтобы уравновесить силу требуемого тока для усилий в противоположных направлениях. Если же нагрузка преимущественно инерционная, давлением в одной из камер управляют так, чтобы уравновесить требуемые токовые моменты относительно средней позиции исполнительного органа, а давление в другой камере регулируют так, чтобы уравновесить усилия на поршне 8 в средней позиции системы.
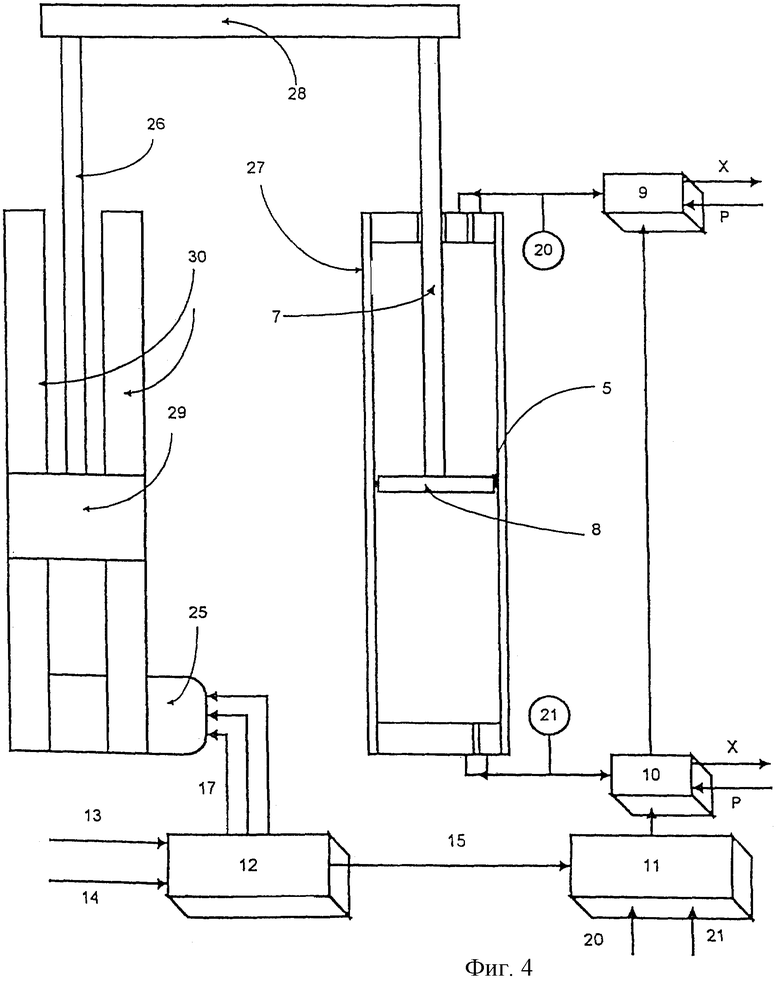
На фиг.4 показано изобретение в случае применения его в линейном позиционирующем устройстве, приводимом вращательным двигателем. В этом примере мы выбрали конструкцию с ременным приводом, но изобретение точно так же может быть применено в кривошипном приводе с понижающей передачей или, например, в исполнительном органе с шариковой винтовой передачей.
Здесь вращательный двигатель 25 перемещает каретку 29 с помощью ремней 30. Выходной элемент 26 присоединен к газовой рессоре подходящим соединителем 28. Работа системы с гравитационной и инерционной нагрузками такая же, как описано ранее, различные элементы имеют такие же самые позиционные номера, как прежде.
Понятно, что изобретение не ограничено машинами, в которых вся упругая сила обеспечивается газовой рессорой или рессорами, управляемыми блоком 11 и клапанами 9 и 10. Оно может оказаться предпочтительным для машины, в которой позиционирующий механизм образует собой часть, которая должна быть оснащена дополнительными пружинами, газовыми или металлическими, характеристики которых установлены заранее, чтобы обеспечить часть резервуара для сохранения энергии механизма.
Понятно, что вся упругая сила, необходимая для эффективной работы машины, может быть обеспечена металлическими пружинами или газовыми рессорами, которые устанавливает вручную на правильные значения обученный работник, ведущий наблюдение за текущими характеристиками потребления тока электрическим двигателем, чтобы выполнять эту регулировку.
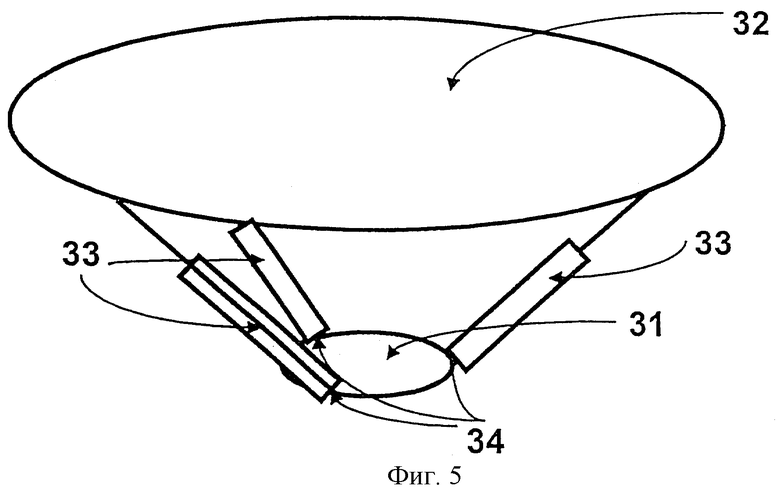
Обратимся теперь к фиг.5. Стационарная, или базовая, платформа обозначена позицией 31, а подвижная платформа обозначена позицией 32. Цилиндры 33 образуют соединение между стационарными и подвижными элементами. Понятно, что принудительно внося соответствующие вариации в длины цилиндров, можно менять положение и позицию подвижной платформы относительно стационарной платформы. Понятно также, что по мере того, как каждый цилиндр раздвигается или укорачивается, угол между этим цилиндром и горизонтальной поверхностью должен меняться. Цилиндры поворачиваются в вертикальных плоскостях вокруг своих нижних проушин 34.
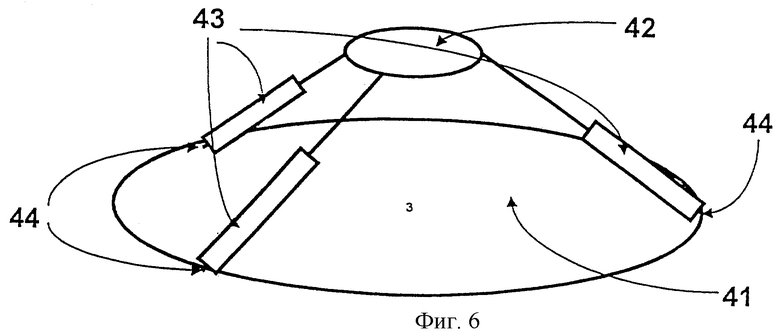
Чтобы усовершенствовать способность платформы к продольным и поперечным угловым колебаниям и улучшить доступность механизма при сборке, обслуживании и ремонте, это изобретение отличается той особенностью, что треножник сконструирован так, что он принимает более обычную форму, показанную на фиг.6. На этой иллюстрации верхняя платформа 42 теперь меньше, чем нижняя платформа 41. Можно заметить, что проушины или шарниры на нижних концах цилиндров 43 (которые являются элементами машины, испытывающими самые большие напряжения) находятся на внешних краях базы движения, что делает их и главные корпуса цилиндров более доступными для сборки, контроля и обслуживания. Можно также заметить, что поверхность неподвижной платформы не занята и не загромождена ограничивающими рамами, что обеспечивает свободный доступ к центральной зоне, если это необходимо. Дальнейшее достоинство такой конфигурации состоит в том, что площадь стыка между подвижной платформой и капсулой имитатора уменьшена, что накладывает меньше ограничений на конструкцию пола капсулы и устройства для доступа к капсуле.
Механизм, показанный на фиг.6, имеет, однако, тот недостаток, что в некоторых крайних точках движения угол между подвижной платформой 42 и горизонталью может быть больше, чем угол между по крайней мере одним из цилиндров 43 и горизонталью - так что в результате механизм перекладывается в запертое положение. Чтобы предотвратить это, относительные размеры верхней подвижной платформы 42, нижней неподвижной платформы 41 и длины цилиндров подобраны так, чтобы перекладка не могла произойти. В общем случае отношение размера неподвижной платформы 41 к размеру подвижной платформы 42 уменьшено. Фиг.7 иллюстрирует это усовершенствование, элементы механизма имеют те же позиционные номера, что и в варианте осуществления, показанном на фиг.6.
На фиг.8 показан вариант осуществления изобретения, имеющий центральный, вертикальный податливый опорный элемент или узел 45, с помощью которого осуществляется противодействие статическому весу подвижной платформы 42, чтобы избавить электромагнитные цилиндры 43 от необходимости генерировать постоянную силу. Понятно, что вертикальная жесткость центрального податливого опорного элемента должна быть оптимизирована в соответствии с общей конструкцией базы движения и ее рабочими параметрами. Если опорный элемент представляет собой исполнительный орган с газовой рессорой, может оказаться необходимым соединить его с расположенным поблизости резервуаром сжатого газа (не показан) соответствующего объема.
Альтернативно, единственный вертикальный исполнительный орган может быть заменен или дополнен двумя или более исполнительными органами, наклоненными внутрь по направлению к центроиду подвижного треугольника, причем их пропорции выбраны так, чтобы они поворачивались на некоторый угол в вертикальной плоскости, когда подвижная платформа поднимается и опускается. Наклонные исполнительные органы могут представлять собой пневматические стойки с предварительно сжатым газом, такие как те, что используются для поддержания крышки автомобильного багажника, расположенные так, чтобы линии их действия сходились над центром, что может быть использовано для укладки платформы в позицию загрузки, когда это необходимо.
На фиг.9 показан вариант осуществления изобретения с центральным вертикальным сильфонным блоком, с помощью которого осуществляется противодействие статическому весу подвижной платформы 42, чтобы избавить электромагнитные цилиндры 43 от необходимости генерировать постоянную силу. Понятно, что вертикальная жесткость центрального сильфона должна быть оптимизирована в соответствии с общей конструкцией базы движения и ее рабочими параметрами. Это означает, что гибкая часть сильфона должна быть смонтирована на центральном жестком цоколе выбранной высоты (Жесткий цоколь не показан отдельно на фиг.9).
Упругое действие сильфона может быть усовершенствовано двумя или более патентованными пневматическими стойками (не показаны), расположенными так, чтобы они поворачивались на некоторый угол в вертикальной плоскости, когда подвижная платформа поднимается и опускается. Стойки могут быть установлены так, чтобы линии их действия сходились над центром, что может быть использовано для укладки платформы в позицию загрузки (то есть самую низкую), когда это необходимо, без необходимости сбрасывать давление в сильфонном блоке, чем снижается потребление сжатого воздуха.
Понятно, что использование сильфонного блока в качестве центрального ограничительного элемента не мешает применению любых устройств для монтажа и подсоединения электромагнитных исполнительных органов, так что они тоже могут работать в качестве индивидуальных газовых рессор, вместо или в сочетании с силами, создаваемыми сильфоном и (или) пневматическими стойками. Когда электромагнитные исполнительные органы используются дополнительно в качестве газовых упругих элементов, предпочтительно должно быть предусмотрено средство для частой регулировки давления, чтобы минимизировать долговременный интеграл токов исполнительных органов, а следовательно, и потребляемую мощность.
Устройство для сообщения движения согласно настоящему изобретению содержит механизм, в котором один из элементов (базовая платформа) может рассматриваться как стационарный, а другой элемент (подвижная платформа) может рассматриваться как часть, позиционируемая с помощью исполнительных органов.
Фиг.10 представляет собой упрощенную схему платформы Стьюарта, показывающую подвижную платформу 51, поддерживаемую цилиндрами 53 над базовой платформой 52. На этой схеме радиус 54 окружности подвижной платформы меньше, чем радиус 55 базовой платформы. На фиг.11 это показано в горизонтальной проекции.
Фиг.12 и 13 показывают принципиальное различие между платформой Стьюарта, у которой радиус 54 меньше, чем радиус 55, как на фиг.12, и платформой Стьюарта, у которой радиус 54 больше, чем радиус 55, как на фиг.13. Рассмотрим силы в газовых рессорах, когда подвижная платформа смещается вперед (вправо на фиг.16). Для случая, когда подвижная платформа меньше, чем базовая платформа, цилиндры 56 "впереди" подвижной платформы сжаты и создают силы, которые стремятся толкать край платформы вверх, а цилиндры 57 "сзади" платформы растянуты, что снижает направленный вверх компонент их усилий и позволяет заднему краю платформы опускаться. Следовательно, можно ожидать, что такая компоновка будет заставлять подвижную платформу поворачиваться вверх (кабрироватъ) при линейном перемещении вперед (фиг.16). И наоборот, как показывают аналогичные рассуждения, поведение механизма, в котором радиус подвижной платформы больше, чем радиус базовой платформы, позволит ожидать, что эта компоновка будет заставлять подвижную платформу поворачиваться вниз {клевать) при линейном перемещении вперед (фиг.17).
Отсюда вытекает, следовательно, что между двумя крайними вариантами должна существовать оптимальная конфигурация, в которой смещение вперед не создает тенденций ни к кабрированию, ни к клевку. Если принять в расчет любое данное сочетание размеров цилиндров, то можно ожидать, что оптимальное отношение размера нижней платформы к размеру верхней платформы составит 2:1, как показано в виде упрощенной схемы на фиг.18.
Фиг.19 представляет собой трехмерную диаграмму потребления мощности типичной базы движения типа платформы Стьюарта для разумного одновременного сочетания всех шести возможных движений (вертикальная качка, продольный снос, поперечный снос, килевая качка, бортовая качка и рыскание). По одной оси показано, как потребление мощности базой движения меняется в зависимости от соотношения размеров неподвижной и подвижной платформ, а по другой оси показано, как оно меняется в зависимости от соотношения объемов газовой рессорной системы (или от жесткости эквивалентной системы твердых пружин).
Из диаграммы можно видеть, что наилучшее соотношение размеров платформ лежит в области 1,5, а наилучшее соотношение объемов газовой рессоры лежит в области 1,8. Это справедливо для всех типов цилиндров и баз движения, изученных до настоящего времени.
На фиг.20 показано, как потребляемая мощность меняется в зависимости от типа движения и "упругости" механизма, определенной соотношением объемов газовой рессоры. Следует отметить, что мягкая или "уравновешенная" база движения должна иметь большой резервуар для газовой рессоры и низкое соотношение объемов, занимая левую часть диаграммы, в то время как "жесткая" база движения занимает правую часть диаграммы. Как и ожидалось, потребление мощности резко возрастает для всех типов движения по мере того, как жесткость подвески увеличивается, приближаясь к краю диаграммы.
Тем не менее следует отметить, что потребление мощности при "килевой качке" очень велико, когда подвеска оптимизирована для "вертикальной качки", т.е. когда механизм "уравновешен". Также следует отметить, что потребляемая мощность при "килевой качке" может быть очень сильно снижена увеличением упругости системы до оптимальной величины, которая меньше, чем в том случае, когда начинают преобладать силы "жесткого" подвешивания. Существуют подобные же оптимальные характеристики подвешивания для других режимов движения, но основным является килевая качка. (Необходимо помнить, что концепция заявки WO 93/01577 принципиально неудовлетворительна в режиме килевой качки.)
Следует понимать, что, хотя принципы настоящего изобретения разъяснены на примере системы шестиосного движения, известной как платформа Стьюарта, они в равной степени относятся к базам движения других типов, таких как трехосная система, о которой идет речь в заявке WO 93/01577, и к различным другим конструкциям баз движения, описанных в наших одновременно рассматриваемых заявках.
Следует далее понимать, что механизм имитатора имеет свой зеркальный эквивалент в виде стабилизированной платформы, где (например) нижняя платформа испытывает перемещения, которые должны быть погашены относительными движениями цилиндров так, чтобы удерживать верхнюю платформу в неподвижном состоянии. Следовательно, оптимизированная конструкция механизма базы движения, которая описана здесь, в равной степени распространяется и на стабилизированные платформы, базирующиеся на конфигурации Стьюарта, а принципы в целом распространяются на стабилизированные платформы других типов.
Обратимся теперь к фиг.21А, которая показывает основную последовательность функций управления электромагнитным исполнительным органом со связанной с ним или встроенной податливой опорой, в которой податливость может изменяться с учетом вариации параметров, таких как мгновенная позиция, требуемая позиция, нагрузка, ускорение, скорость и т.п. В этом варианте осуществления изобретения податливость варьирует в зависимости от мгновенной нагрузки, которая определяется как функция от силы тока, потребляемого электромагнитным исполнительным органом в ответ на сигналы потребления. На фиг.21А показана последовательность шагов, выполняемых для варьирования податливости газовой рессоры. На шаге 201 сила тока возбуждения, воспринимаемая подходящими датчиками, подается на вход системы управления. Этот сигнал интегрируется на шаге 202 как текущий интеграл на протяжении последовательных периодов сканирования, длительность которых зависит от конкретных обстоятельств, но которая может составлять, например, величину порядка трех секунд в случае базы движения для развлечений.
Полученный таким образом интеграл сравнивается затем с заранее установленными пороговыми значениями на шаге 203. Далее превышение порога (если оно существует) управляет генерированием управляющего сигнала или "импульса возбуждения", длительность которого пропорциональна этому превышению. Этот сигнал управляет открытием клапана с целью впустить газ или выпустить его из закрытой камеры газовой рессоры (не показана), связанной с электромагнитным исполнительным органом по любому из способов, описанных выше. Это изменяет поддержку, создаваемую для груза газовой рессорой, путем непрерывного варьирования или "настройки" ее податливости на динамическое состояние исполнительного органа. Если, например, исполнительный орган быстро раздвигается, клапан открывается, чтобы позволить поступление газа в камеру, объем которой увеличивается, чтобы таким путем снизить сопротивление движению, которое проявлялось бы в противном случае. Пороговые значения выбирают так, чтобы "настройка" газовой рессоры учитывала возможность краткосрочного обратного движения, чтобы не надо было впускать в камеру газ, который тут же потребуется выпускать обратно, а определение необходимости впуска или выпуска газа вычислялось для достаточного периода времени, чтобы сгладить быстрые переходные процессы.
На фиг.21В показаны основные шаги работы системы поддержания массы, совершающей возвратно-поступательное движение, перемещение которой осуществляется электромагнитным исполнительным органом. Как и для базы движения, ток возбуждения электромагнитного исполнительного органа 206 детектируется и подается на вход, но в этом случае детектируется позиция движущегося возвратно-поступательно поршня или другого движущегося возвратно-поступательно элемента исполнительного органа 207 и, далее, на шаге 209 подается также сигнал данных о центре 208. По этим сигналам производится вычисление токового момента вблизи центральной позиции движущегося элемента, после чего на шаге 210 формируется интеграл значений силы тока возбуждения для периода времени, который представляет некое точное количество циклов движущейся возвратно-поступательно массы, с перекрытием времени, чтобы учесть приостановки движения.
Как и раньше, этот интеграл сравнивается с пороговыми значениями на шаге 211, а на шаге 212 определяется сигнал длительности импульса возбуждения, подаваемый на клапан. Этот сигнал подается на одну сторону поршня, в данном случае находящуюся под давлением газа штоковую полость, как представлено прямоугольником 213, а на шаге 214 определяется давление как заранее определенная доля среднего значения давления с целью определения требуемого давления газа на другой стороне поршня на шаге 215, чтобы сбалансировать вариации, которые вводятся в камеру на первой стороне поршня.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРАВЛИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ПОВЫШЕНИЯ УСТОЙЧИВОСТИ ТРАНСПОРТНЫХ СРЕДСТВ | 2003 |
|
RU2249521C1 |
| Устройство для взвешивания жидкого металла в ковше | 1990 |
|
SU1722684A1 |
| ХОДОВАЯ ЧАСТЬ РЕЛЬСОВЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2003 |
|
RU2329908C2 |
| ТЕЛЕЖКА ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2573100C1 |
| ХОДОВАЯ ЧАСТЬ РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА С УЛУЧШЕННОЙ СИСТЕМОЙ ПОПЕРЕЧНОГО РЕССОРНОГО ПОДВЕШИВАНИЯ | 2004 |
|
RU2331536C2 |
| Вибрационный плоскорез | 2023 |
|
RU2830133C1 |
| Система регулирования уроавня портального транспортного средства | 1975 |
|
SU563308A1 |
| Устройство для сборки деталей | 1980 |
|
SU1057228A1 |
| МАХОЛЕТ | 2010 |
|
RU2451623C1 |
| ХОДОВАЯ ЧАСТЬ РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА, ОБОРУДОВАННОГО, ПО МЕНЬШЕЙ МЕРЕ, ОДНОЙ МАШИНОЙ ДЛЯ МЕХАНИЧЕСКОЙ ОБРАБОТКИ РЕЛЬСОВ | 2007 |
|
RU2364536C1 |

Изобретение относится к устройствам для позиционирования или управления движением груза, в частности устройствам позиционирования, может быть использовано в позиционирующих устройствах производственного оборудования. Устройство содержит средство для обеспечения податливого опирания груза и для приложения к грузу сил, чтобы тем вызывать изменение его позиции. При этом средство для приложения сил к грузу действует независимо от указанного податливого опорного средства с целью приложения к грузу возмущающих сил. Податливое опорное средство действует с целью отбора энергии от груза или подачи ее к нему в результате движения, сообщенного ему указанным средством для приложения возмущающих сил. Также в устройстве предусмотрено средство для варьирования податливости указанного податливого опорного средства, которое может действовать с целью варьирования указанной податливости во время работы устройства совместно или отдельно от работы указанного средства для приложения к грузу возмущающих сил. Технический результат заключается в экономии потребляемой мощности и обеспечении выполнения устройством заданного ему движения. 2 н. и 15 з.п. ф-лы, 22 ил.
| ENGSTRAND В: "PNEUMATICS: A FORCE BEYOND VIRTUAL REALITY", HYDRAULICS AND PNEUMATICS, vol.49, no.7, 1 July 1996, pages 35-38, XP000595310 | |||
| WO 9301577 A 21.01.1993 | |||
| ЕР 0761266 А 12.03.1997 | |||
| US 5656903 А 12.08.1997 | |||
| DE 19543876 А1 28.05.1997 | |||
| US 3952979 А 27.04.1976 | |||
| ЦЕНТРОБЕЖНЫЙ ДИСКОВЫЙ ИЗМЕЛЬЧИТЕЛЬ | 2020 |
|
RU2739428C1 |
| US 5568993 А 29.10.1996. | |||

