Настоящее раскрытие касается систем и способов для наклона медицинских устройств, предназначенных для ухода за детьми раннего возраста, в частности для поддержания целостности окружающей среды вокруг детей в процессе регулировки угла наклона несущего ребенка устройства.
Известно, что дети раннего возраста подвержены инфекциям, воздействию бактерий, вирусов и других патогенных организмов, способных вызывать инфекции. По меньшей мере, в некоторых случаях они могут передаваться воздушным путем через окружающий воздух, содержащий зараженные частицы. Известно применение инкубатора, системы обогрева новорожденных, устройства для поддержания ребенка и/или медицинского устройства для ухода за детьми раннего возраста, например новорожденными, в реанимационном отделении или ином месте, например для поддержания окружающей среды, обладающей соответствующей температурой, воздушным потоком, влажностью, стерильными условиями и/или другими условиями окружающей среды. Окружающая среда, в которой обычно используются инкубаторы и/или системы обогрева новорожденных, например в больницах, как правило, заражена различными патогенными организмами. Известно, что на некоторых детей раннего возраста при определенных условиях может благоприятно воздействовать размещение под наклоном, а не на плоской поверхности. Например, приподнятая верхняя часть тела может предотвратить гастроэзофагеальный рефлюкс (GER) у недоношенных детей. Приподнятая нижняя часть тела может благоприятно сказываться на новорожденных, страдающих сердечной недостаточностью.
Таким образом, задача одного или более вариантов осуществления настоящего изобретения заключается в создании системы для наклона несущего ребенка устройства, имеющего терморегулируемую зону. Система содержит наклонную платформу, корпус, опорное звено, привод, а также ручной соединитель. Наклонная платформа выполнена с возможностью расположения под устройством для поддержания ребенка. Наклонная платформа выполнена с возможностью наклона вокруг оси наклона. Корпус расположен под наклонной платформой. Опорное звено удерживается корпусом, при этом опорное звено обеспечивает опору наклонной платформе для поддержания ориентации наклонной платформы вокруг оси наклона. Опорное звено удерживается корпусом так, что положение опорного звена относительно корпуса регулируется. Регулировка положения опорного звена относительно корпуса регулирует поворотное положение наклонной платформы вокруг оси наклона. Привод выполнен с возможностью регулировки положения опорного звена относительно корпуса, тем самым регулируя поворотное положение наклонной платформы. Привод расположен и активируется за пределами терморегулируемой зоны устройства для поддержания ребенка. Ручной соединитель соединяет наклонную платформу с опорным звеном. Регулировка положения опорного звена осуществляется посредством ручного соединителя. Ручной соединитель выполнен с возможностью отсоединения наклонной платформы от опорного звена путем восприятия манипуляции.
Еще один аспект одного или более вариантов осуществления настоящего изобретения заключается в создании способа для поддержания ребенка с помощью несущего ребенка устройства, используя систему, имеющую наклонную платформу, расположенную под устройством для поддержания ребенка, привод, опорное звено, корпус, расположенный под наклонной платформой, а также ручной соединитель, соединяющий наклонную платформу с опорным звеном. Способ содержит удерживание опорного звена корпусом так, что положение опорного звена относительно корпуса регулируется посредством активации, воспринимаемой приводом, при этом регулировка положения опорного звена относительно корпуса регулирует поворотное положение наклонной платформы вокруг оси наклона, при этом регулировка положения опорного звена осуществляется посредством ручного соединителя; обеспечение опоры для наклонной платформы с помощью опорного звена для поддержания поворотного положения наклонной платформы вокруг оси наклона; а также отсоединение наклонной платформы от опорного звена путем восприятия манипуляции посредством ручного соединителя.
Еще один аспект одного или более вариантов осуществления заключается в создании системы, выполненной с возможностью поддержания ребенка с помощью несущего ребенка устройства. Система содержит средство наклона, корпусное средство, подъемное средство, опорное средство, приводное средство, а также соединительное средство. Средство наклона, расположенное под устройством для поддержания ребенка, предназначено для наклона устройства для поддержания ребенка вокруг оси наклона. Подъемное средство занимает некоторое положение относительно корпусного средства, расположенного ниже средства наклона. Положение подъемного средства регулируется. Регулировка положения относительно корпусного средства регулирует поворотное положение средства наклона вокруг оси наклона. Опорное средство обеспечивает опору средству наклона для поддержания поворотного положения средства наклона вокруг оси наклона. Приводное средство служит для восприятия активации. Активация приводного средства регулирует положение подъемного средства относительно корпусного средства, тем самым регулируя поворотное положение средства наклона. Соединительное средство предназначено для соединения средства наклона с опорным средством. Регулировка положения подъемного средства относительно корпусного средства осуществляется через соединительное средство. Соединительное средство выполнено с возможностью отсоединения средства наклона от опорного средства путем восприятия манипуляции.
Еще один аспект одного или более вариантов осуществления настоящего изобретения заключается в создании системы для наклона устройства для поддержания ребенка. Система содержит наклонную платформу, корпус, невращающийся ходовой винт, а также привод. Наклонная платформа выполнена с возможностью расположения под устройством для поддержания ребенка. Наклонная платформа выполнена с возможностью наклона вокруг оси наклона. Корпус расположен под наклонной платформой. Невращающийся ходовой винт удерживается корпусом, при этом невращающийся ходовой винт обеспечивает опору наклонной платформе для поддержания поворотного положения наклонной платформы вокруг оси наклона. Невращающийся ходовой винт удерживается корпусом так, что положение невращающегося ходового винта относительно корпуса регулируется. Регулировка положения невращающегося ходового винта относительно корпуса регулирует поворотное положение наклонной платформы вокруг оси наклона. Привод выполнен с возможностью регулировки положения невращающегося ходового винта относительно корпуса, тем самым регулируя поворотное положение наклонной платформы.
Эти и другие задачи, признаки и характеристики настоящего изобретения, а также способы работы и функции соответствующих элементов конструкции и сочетаний деталей, как и экономические аспекты производства, станут более очевидными после рассмотрения нижеследующего описания и прилагаемой формулы изобретения со ссылкой на сопроводительные чертежи, составляющие часть описания, при этом одинаковые ссылочные позиции обозначают соответствующие детали на различных фигурах. Следует, однако, ясно понимать, что чертежи приведены лишь в иллюстративных и описательных целях и не определяют границы изобретения.
На ФИГ. 1 показаны различные компоненты системы для наклона согласно одному или более вариантам осуществления;
на ФИГ. 2 показан вид в изометрии несущего ребенка устройства согласно одному или более вариантам осуществления;
на ФИГ. 3 показано сечение несущего ребенка устройства согласно одному или более вариантам осуществления;
на ФИГ. 4 показаны различные компоненты системы для наклона согласно одному или более вариантам осуществления;
на ФИГ. 5-7 показаны различные компоненты, связанные с деблокирующим механизмом для отсоединения наклонной платформы от опорного звена согласно одному или более вариантам осуществления;
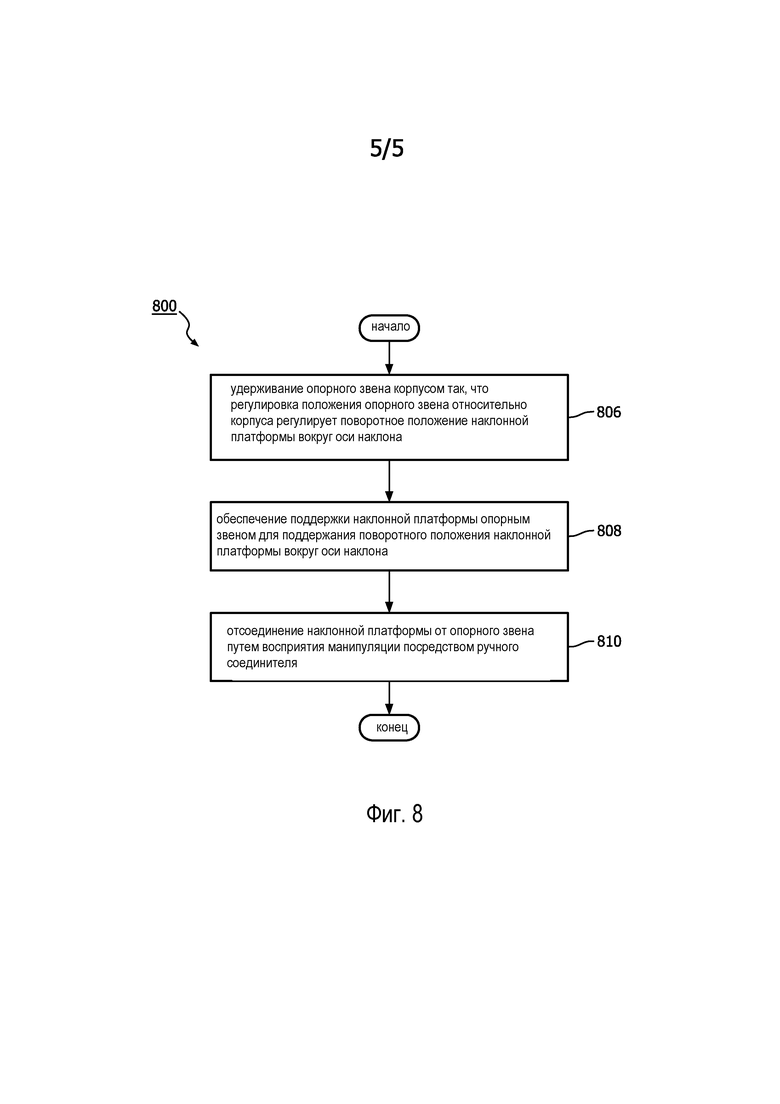
на ФИГ. 8 показан способ наклона несущего ребенка устройства согласно одному или более вариантам осуществления.
В настоящем описании утверждение о том, что две или более частей или компонент «соединены» означает, что эти части соединены или работают совместно прямо или косвенно, т.е. посредством одной или более промежуточных частей или компонент, если присутствует соединительное звено. В настоящем описании словосочетание «непосредственно соединены» означает, что два элемента находятся непосредственно в контакте друг с другом. В настоящем описании словосочетание «неподвижно соединены» или «зафиксированы» означает, что два компонента соединены так, чтобы перемещаться как одно целое, сохраняя постоянную ориентацию относительно друг друга.
В настоящем описании термин «цельный» означает, что компонент создан в виде единого целого или блока. Иными словами, компонент, включающий в себя детали, созданные по отдельности, а затем соединенные вместе в виде блока, не является «цельным» компонентом или телом. В настоящем описании утверждение о том, что две или более частей или компонент «входят в зацепление» друг с другом, означает, что эти части оказывают силовое воздействие друг на друга либо непосредственно, либо посредством одной или более промежуточных частей или компонент. В настоящем описании термин «число» означает один или целое число больше единицы (т.е. множество).
Фразы, обозначающие направление, используемые в настоящем описании, например, но не ограничиваясь перечисленным, верх, низ, левый, правый, верхний, нижний, передний, задний, а также их производные, относятся к ориентации элементов, показанных на чертежах, и не накладывают ограничений на формулу изобретения, если в ней это явно не оговорено.
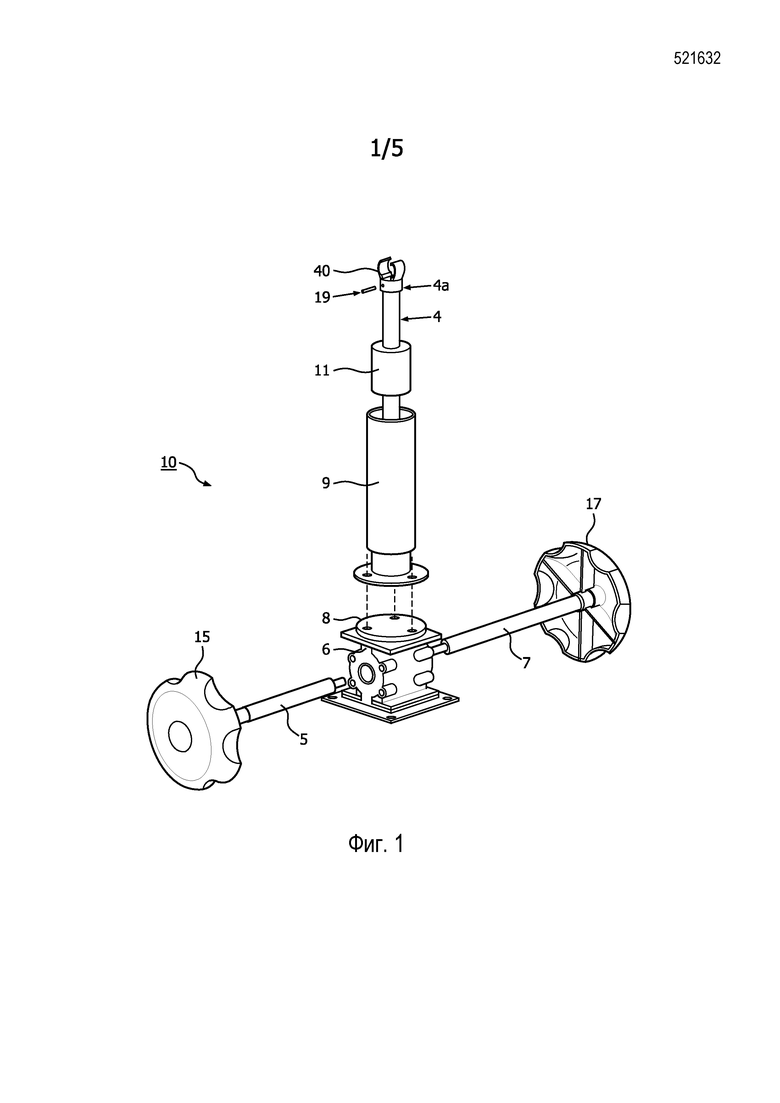
На ФИГ. 1 показан покомпонентный вид различных составных частей системы 10 наклона, предназначенной для наклона согласно одному или более вариантам осуществления, в вертикальном положении. Система 10 наклона включает в себя один или более из следующих элементов: первый привод 15, второй привод 17, корпус 9, опорное звено 4, первый стержень 5, второй стержень 7, редуктор 6, монтажную плиту 8, гайку 11, установочный палец 19, скобу 40 и/или другие компоненты.
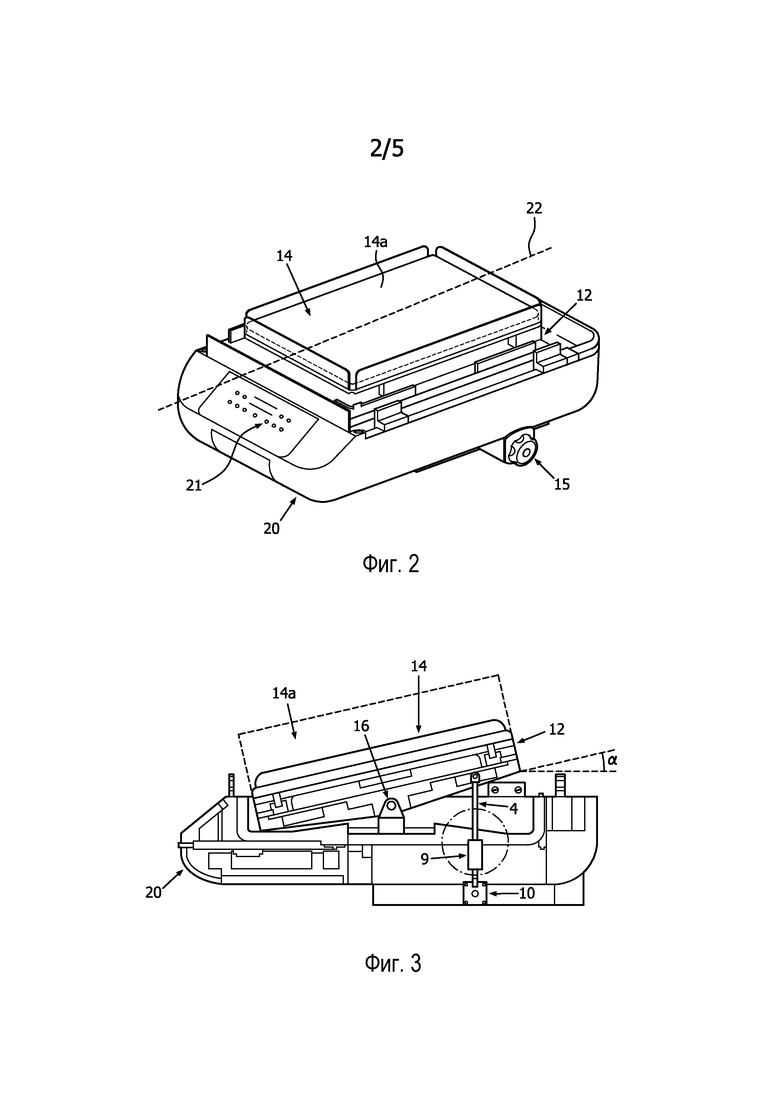
Как показано на ФИГ. 3, система 10 наклона может быть интегрирована с медицинским устройством 20 для ухода за детьми, например инкубатором или системой обогрева новорожденных. Медицинское устройство 20 для ухода за детьми и/или система 10 наклона может включать в себя один или более из следующих элементов: наклонную платформу 12, несущее ребенка устройство 14 и/или другие компоненты. В контексте настоящего раскрытия термин «ребенок» может относиться к ребенку в возрасте до одного месяца, ребенку раннего возраста, новорожденному, младенцу и/или другому субъекту, который достаточно мал, чтобы помещаться в инкубатор или систему обогрева новорожденных. Наклонная платформа 12 выполнена с возможностью наклона вокруг оси 16 наклона в ответ на регулировку положения опорного звена 4. Например, отрегулированное положение может представлять собой продольное положение. Несущее ребенка устройство 14 может включать в себя один или более из следующих элементов: кровать, матрас, подкладку, одеяло, и/или другую пригодную структуру для поддержания ребенка. Наклонная платформа 12 расположена под несущим ребенка устройством 14, так что наклон наклонной платформы 12 соответствующим образом наклоняет несущее ребенка устройство 14. Корпус 9 расположен под наклонной платформой 12. Медицинское устройство 20 для ухода за детьми и/или несущее ребенка устройство 14 включают в себя зону 14a, которая может представлять собой терморегулируемую зону, стерильную зону и/или зону, в пределах которой должна поддерживаться подходящая окружающая среда в интересах ребенка. Эту подходящую окружающую среду можно назвать микросредой для инкубаторов, а также макросредой для систем обогрева новорожденных. Зона 14a может содержать трехмерную зону или трехмерный объем. В число факторов окружающей среды могут входить температура, воздушный поток, газовый состав вблизи ребенка, влажность, условия освещения, защита от патогенных организмов, вредоносные частицы и/или заражение. Например, в некоторых вариантах осуществления система 10 наклона может быть встроена в инкубатор, так что терморегулируемая зона может содержать зону, объем и/или замкнутое пространство, огороженное колпаком инкубатора, и/или зону под наклонной платформой 12. Благодаря компактности системы 10 наклона, работа системы 10 наклона может иметь малое или ничтожное влияние на терморегулирование в зоне 14a, в отличие от существующих систем наклона. Кроме того, благодаря компактности и размещению относительно медицинского устройства 20 для ухода за детьми использование системы 10 наклона по настоящему описанию позволяет проводить «подповерхностную» фототерапию для лечения гипербилирубинемии. В настоящем описании понятие «подповерхностная» может относиться к поверхности несущего ребенка устройства 14, например системы обогрева новорожденных.
Как показано на ФИГ. 1, регулировка (продольного) положения опорного звена 4 начинается тогда, когда первый привод 15 и/или второй привод 17 приводится в действие. В некоторых вариантах осуществления первый привод 15 и/или второй привод 17 могут быть выполнены в виде ручек, способных приводиться в действие, например в виде вращательного движения, например человеком, осуществляющим уход. Активация первого привода 15 и/или второго привода 17 может передаваться и/или преобразовываться в регулировку положения опорного звена 4 относительно корпуса 9. Опорное звено 4 удерживается, например, механически, корпусом 9, например, так, что опорное звено 4 проходит через корпус 9. В некоторых вариантах осуществления опорное звено 4 представляет собой ходовой винт. Возможны и другие (механические) соединения между корпусом 9 и опорным звеном 4. Опорное звено 4 может включать в себя дистальный конец 4a, обеспечивающий опору наклонной платформе для поддержания поворотного положения вокруг оси наклона. Опорное звено 4 может удерживаться корпусом 9 так, что продольное положение опорного звена 4 относительно корпуса 9 регулируется продольно. Регулировка положения опорного звена 4 регулирует поворотное положение наклонной платформы вокруг своей оси наклона.
В некоторых вариантах осуществления первый привод 15 может соединяться посредством стержня 5 с редуктором 6, так что приведение в действие первого привода 15 передается и/или преобразуется посредством стержня 5 в перемещение в редукторе 6, а затем передается и/или преобразуется в перемещение монтажной плиты 8, соединенной с редуктором 6. В качестве альтернативы и/или одновременно второй привод 17 может соединяться посредством стержня 7 с редуктором 6, так что приведение в действие второго привода 17 передается и/или преобразуется посредством стержня 7 в перемещение в редукторе 6, а затем передается и/или преобразуется в перемещение монтажной плиты 8, соединенной с редуктором 6. Редуктор 6 может представлять собой, например, T-образный конический редуктор. Соединения, участвующие в работе редуктора 6, могут представлять механические соединения. В некоторых вариантах осуществления система 10 наклона может включать в себя два привода, соединенных с одним стержнем. Перемещение монтажной плиты 8 может представлять собой поворотное перемещение. Корпус 9 может соединяться с редуктором 6 посредством монтажной плиты 8 так, что поворотное перемещение монтажной плиты 8 может передаваться и/или преобразовываться в поворотное перемещение корпуса 9. Гайка 11 может крепиться в корпусе 9 и/или быть встроена в него, так что перемещение корпуса 9 передается и/или преобразуется в регулировку положения, например продольного положения, опорного звена 4 посредством сопряжения резьбы между гайкой 11 и опорным звеном 4. В некоторых вариантах осуществления, не показанных на ФИГ. 1, перемещение монтажной плиты 8 может передаваться и/или преобразовываться в поворотное перемещение опорного звена 4, а не в «невращательное» перемещение. Гайка 11 может быть не видна на неразобранном виде системы 10 наклона. Опорное звено 4 может перемещаться поступательно, например, перемещаться без углового смещения, как винт, совершающий поступательное перемещение. В качестве альтернативы и/или одновременно опорное звено 4 может быть неповоротным. Опорное звено 4 может представлять собой трапецеидальный винт. Различные варианты осуществления опорного звена 4 могут быть объединены, например опорное звено 4 может представлять собой неповоротный трапецеидальный ходовой винт, совершающий поступательное перемещение.
На ФИГ. 2 показан вид в изометрии медицинского устройства 20 для ухода за детьми и несущего ребенка устройства 14 согласно одному или более вариантам осуществления. Ребенок может быть помещен на несущее ребенка устройство 14 или поддерживаться им, так что зона 14a может представлять собой терморегулируемую зону, стерильную зону и/или зону, в которой должна поддерживаться подходящая окружающая среда в интересах ребенка. Наклонная платформа 12 может иметь центральную ось 22, разделяющую наклонную платформу 12 на левую половину и правую половину. Центральная ось 22 может составлять часть центральной плоскости, разделяющей медицинское устройство 20 для ухода за детьми и несущее ребенка устройство 14 на левую половину и правую половину. Медицинское устройство 20 для ухода за детьми может включать в себя панель 21 управления, которая, например, может быть выполнена с возможностью управления температурой и/или другими факторами соответствующей окружающей среды зоны 14a. Первый привод 15 расположен вне зоны 14a и приводится в действие за пределами зоны 14a, как и второй привод, аналогичный второму приводу 17, показанному на ФИГ. 1, при этом второй привод не виден на ФИГ. 2.
Если объединить ФИГ. 1 и ФИГ. 2, первый привод 15 и второй привод 17 расположены на противоположных сторонах относительно несущего ребенка устройства 14, так что, например, человек, осуществляющий уход, может легко наклонить наклонную платформу 12 с обеих сторон несущего ребенка устройства 14, сохраняя при этом целостность окружающей среды зоны 14a. В целях удобства система 10 наклона предусматривает регулировку одной рукой угла наклона наклонной платформы 12.
Если объединить ФИГ. 1, ФИГ. 2 и ФИГ. 3, опорное звено 4 может располагаться с заданным смещением от центра по отношению к центральной оси 22. Заданное смещение от центра может составлять около 50 мм, около 60 мм, около 70 мм, около 80 мм, около 90 мм, около 100 мм, около 110 мм, около 120 мм, по меньшей мере, 80 мм, по меньшей мере, 100 мм, по меньшей мере, 120 мм и/или другое пригодное расстояние, так что опорное звено 4 позволяет провести и/или не вносит искажений в подповерхностную фототерапию для субъекта 106 и/или (рентгенографическое) фотографическое исследование зоны по центральной оси 22 или вблизи нее. В качестве альтернативы и/или одновременно опорное звено 4 может располагаться с заданным аксиальным смещением от оси 16 наклона. Заданное аксиальное смещение может составлять около 150 мм, около 160 мм, около 170 мм, около 180 мм, около 190 мм, около 200 мм, около 210 мм, около 220 мм, по меньшей мере, 180 мм, по меньшей мере, 190 мм, по меньшей мере, 200 мм, по меньшей мере, 220 мм и/или другое пригодное расстояние, так что опорное звено 4 позволяет провести и/или не вносит искажений в подповерхностную фототерапию для субъекта 106 и/или (рентгенографическое) фотографическое исследование зоны по центральной оси 22 или вблизи нее. Например, известные устройства, обеспечивающие проведение подповерхностной фототерапии, могут иметь длину в диапазоне от около 50 см до около 75 см, ширину от около 28 см до около 44 см и высоту от около 11 см до около 16 см. В то время как будущие устройства для проведения подповерхностной фототерапии могут быть более компактными, чем известные устройства, использование для опорного звена 4 аксиального смещения от оси 16 наклона и/или смещения от центра по отношению к центральной оси 22 позволит улучшить проведение подповерхностной фототерапии по сравнению с использованием механизма наклона, расположенного по центру под наклонной платформой, несущим ребенка устройством и/или медицинским устройством для ухода за детьми. В некоторых вариантах осуществления системы 10 наклона, такой как может использоваться с определенными общими типами систем обогрева новорожденных, расположенное по центру опорное звено 4, например на центральной оси 22 или вблизи нее и/или на центрально расположенной оси 16 наклона или вблизи нее, не оставляет достаточно пространства, чтобы позволить провести подповерхностную фототерапию, по меньшей мере, для некоторых из описанных известных устройств.
В некоторых вариантах осуществления ось 6 наклона может располагаться на одном конце наклонной платформы 12 или вблизи него. В этих случаях опорное звено 4 может располагаться на противоположном конце наклонной платформы 12 или вблизи него, при заданном аксиальном смещении, составляющем около 300 мм, около 325 мм, около 350 мм, около 375 мм, около 400 мм, около 450 мм и/или другое пригодное расстояние, так чтобы позволить проводить подповерхностную фототерапию, например для системы обогрева новорожденных.
Как показано на ФИГ. 3, представленное опорное звено 4 полностью выдвинуто вверх за пределы корпуса 9, так что угол α наклона наклонной платформы 12 принимает свое максимальное положительное значение в диапазоне углов, определяемых для работы системы 10 наклона. В различных вариантах осуществления диапазон углов может составлять от около -30 градусов до около +30 градусов, от около -20 градусов до около +20 градусов, от около -15 градусов до около +15 градусов, от около -12 градусов до около +12 градусов, от около -10 градусов до около +10 градусов и/или другое количество градусов, пригодное для реализации одного или более конкретных преимуществ для детей в процессе эксплуатации. Диапазон углов может быть асимметричен относительно нуля градусов. Диапазон углов, а также расстояние между опорным звеном 4 и осью 16 наклона являются факторами, определяющими требуемую длину опорного звена 4.
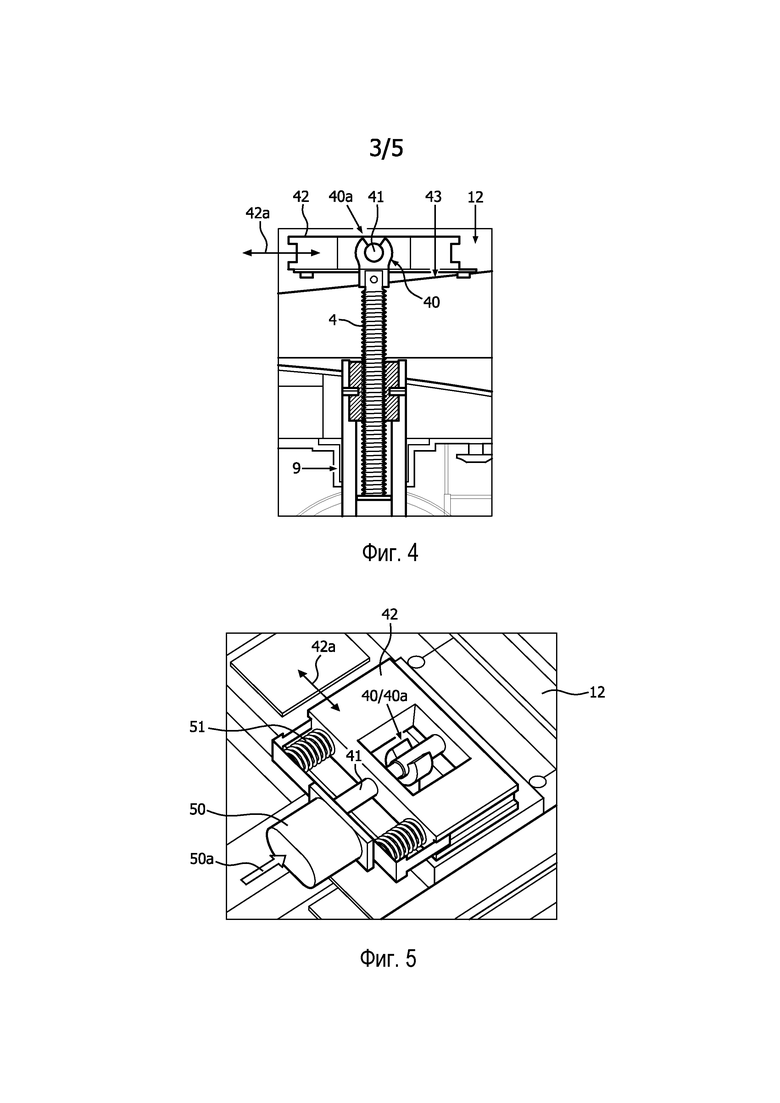
Как показано на ФИГ. 1, система 10 наклона может включать в себя скобу 40, механически соединенную с дистальным концом 4a опорного звена 4, например, посредством установочного пальца 19. Опорное звено 4 может механически соединяться с наклонной платформой и/или ее компонентом посредством шарнирного пальца, сопряженного со скобой 40. По мере регулировки положения опорного звена 4 относительно корпуса 9, например, продольно без углового смещения, точка зацепления с наклонной платформой перемещается горизонтально и/или латерально относительно наклонной платформы. В качестве иллюстрации на ФИГ. 4 показаны различные компоненты, которые могут использоваться для соединения, например механического, опорного звена 4 с наклонной платформой 12 и обеспечения возможности перемещения точки зацепления с наклонной платформой 12. В частности, скоба 40 входит в механическое зацепление с шарнирным пальцем 41. Скоба 40 и шарнирный палец 41 образуют один из возможных вариантов ручного соединителя или разъединителя, поскольку палец 41 может выводиться из зацепления со скобой 40 без использования оснастки или инструмента. Шарнирный палец 41 удерживается внутри или как-то иначе связан с горизонтально-подвижным направляющим блоком 42, способным перемещаться в направлении 42a относительно положения в наклонной платформе 12. В некоторых вариантах осуществления горизонтально-подвижный направляющий блок 42 удерживается в полости, камере и/или другом подходящем замкнутом пространстве наклонной платформы 12 с помощью неподвижно закрепленной стопорной пластины 43. По мере перемещения опорного звена 4, например, вверх за пределы корпуса 9, регулировка поворотного положения наклонной платформы 12 заставляет горизонтально-подвижный направляющий блок 42 перемещаться вдоль направления 42a. В некоторых вариантах осуществления шарнирный палец может быть соединен с дистальным концом опорного звена 4, при этом сопряженная скоба может удерживаться в направляющем блоке, соединенном с наклонной платформой и/или удерживаемом в ней, по аналогии с наклонной платформой 12.
Как показано на ФИГ. 1, в некоторых вариантах осуществления опорное звено 4 выполнено так, что система 10 наклона жестко фиксируется при некоторых, большинстве или всех углах наклона в диапазоне углов наклона, определенных для работы системы 10 наклона, с учетом одного или более из следующих параметров: конкретный коэффициент трения между опорным звеном 4 и гайкой 11 и/или корпусом 9, максимальная длина хода опорного звена 4 в процессе эксплуатации, средний диаметр опорного звена 4, заданное число оборотов опорного звена 4 до полной регулировки наклона наклонной платформы 12, максимальный вес, действующий на опорное звено 4, и/или других соображений, которые могут представлять собой факторы учета при жестком фиксировании опорного звена 4, так чтобы опорное звено 4 не совершало обратного хода. Фиксацию таким способом можно назвать самоблокировкой. В некоторых вариантах осуществления самоблокирующаяся система наклона может не требовать внешнего и/или дополнительного механизма торможения в процессе работы. Примерами внешних и/или дополнительных механизмов торможения служат тормозные колодки, пружинные тормоза, блокируемые газовые пружины, пошаговая блокировка и/или другие механизмы торможения. В предпочтительном варианте осуществления угол наклона винтовой линии опорного звена 4 лежит в диапазоне от около 6 до около 9 градусов, от около 7 до около 8 градусов и/или в пределах другого диапазона, пригодного для жесткой фиксации по настоящему описанию. Заданное число оборотов, необходимое для осуществления полного наклона, составляющего +12 градусов, может лежать в диапазоне от около 6 до около 9 оборотов, от около 8 до около 10 оборотов, от около 9 до около 11 оборотов и/или другом подходящем диапазоне числа оборотов. В некоторых вариантах осуществления может потребоваться меньшее число оборотов путем регулировки передаточного отношения редуктора 6, например, при передаточном отношении 1:2.
Максимальная длина хода опорного звена 4 зависит от заданного расстояния между точкой зацепления опорного звена 4 с наклонной платформой 12 и осью 16 наклона, а также требуемого диапазона углов наклона и/или других факторов. Расстояние между точкой зацепления опорного звена 4 с наклонной платформой 12 и осью 16 наклона может составлять около 160 мм, около 180 мм, около 190 мм, около 200 мм, около 220 мм, от около 170 мм до около 200 мм, от около 190 мм до около 210 мм, и/или другое пригодное расстояние для центрально расположенной оси 16 наклона, либо вдвое большее расстояние для вариантов осуществления, в которых ось 16 наклона расположена на противоположном конце наклонной платформы 12 относительно опорного звена 4. Максимальная длина хода опорного звена 4 в процессе эксплуатации в заданном диапазоне углов может составлять около 80 мм, около 90 мм, около 100 мм, около 120 мм, от около 80 мм до около 110 мм, от около 90 мм до около 130 мм, и/или другой пригодный диапазон максимальных длин хода опорного звена 4 для центрально расположенной оси 16 наклона, либо вдвое большую длину для вариантов осуществления, в которых ось 16 наклона расположена на противоположном конце наклонной платформы 12 относительно опорного звена 4. Шаг опорного звена 4 может составлять около 5 мм, около 6 мм, около 7 мм, около 8 мм, и/или другой пригодный шаг для самоблокировки. Средний диаметр опорного звена 4 может составлять около 12 мм, около 14 мм, около 15 мм, около 16 мм, около 18 мм, от около 12 мм до около 14 мм, и/или другой пригодный диаметр. Коэффициент трения, который также может называться μ, опорного звена 4 может составлять около 0,08, около 0,1, около 0,12, около 0,14 и/или другой пригодный коэффициент трения. В предпочтительном варианте осуществления опорное звено 4 может иметь диаметр около 13 мм, шаг около 5 мм, коэффициент трения около 0,13, максимальный наклон 12 градусов и длину хода около 90 мм. Более низкий коэффициент трения, например, около 0,1, может компенсироваться различными способами, в том числе путем использования опорного звена 4, имеющего шаг около 4 мм для поддержания самоблокировки. Максимальный вес, действующий на опорное звено 4 в процессе нормальной работы системы 10 наклона, может составлять около 10 фунтов, около 15 фунтов, около 20 фунтов, около 25 фунтов, около 30 фунтов, от около 15 фунтов до 25 фунтов и/или другой пригодный предельный вес, включающий в себя наклонную платформу, все или некоторую часть несущего ребенка устройства, одного или более детей и/или другие объекты/компоненты.
Для удобства использования максимальный крутящий момент, необходимый для управления системой 10 наклона посредством первого привода 15 или второго привода 17, может составлять около 0,1 Нм, около 0,2 Нм, около 0,3 Нм, около 0,4 Нм, около 0,5 Нм и/или другую пригодную величину крутящего момента для управления (вручную).
В некоторых вариантах осуществления система наклона может приводиться в движение двигателем, например управляемым с помощью панели 21 управления. В этих случаях максимальный крутящий момент, необходимый для управления вручную, может не рассматриваться в качестве фактора удобства использования.
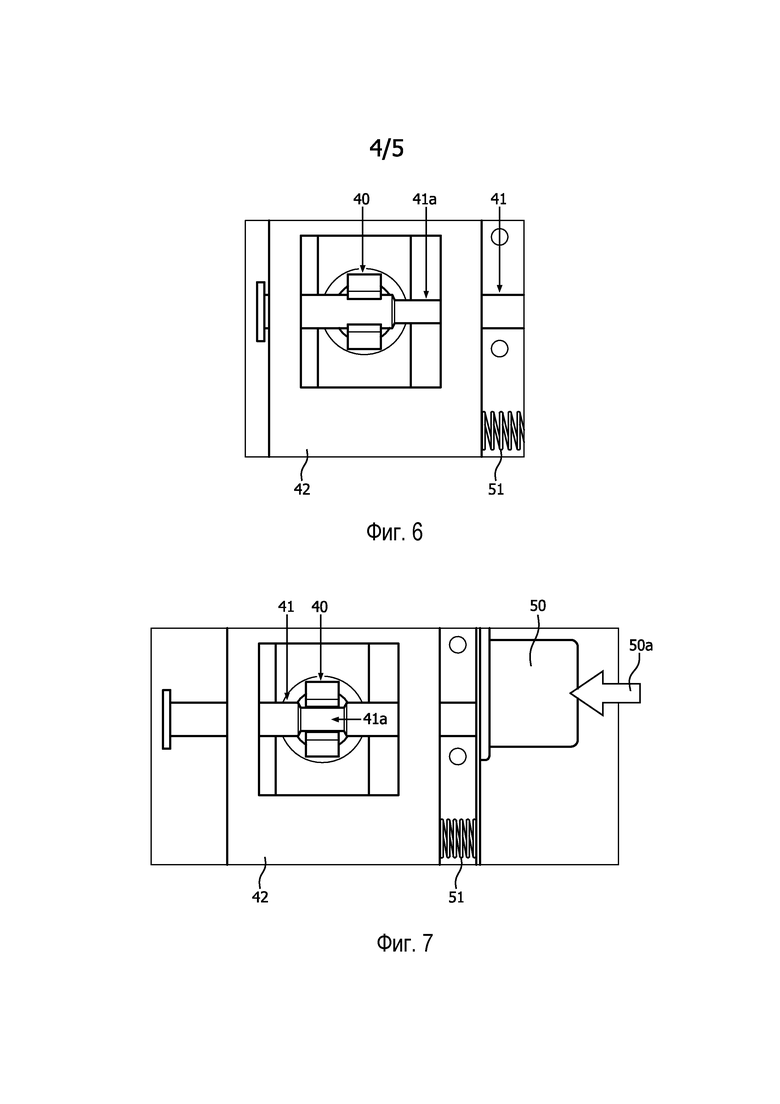
На ФИГ. 5-7 показаны различные компоненты, связанные с деблокирующим механизмом для отсоединения наклонной платформы 12 от опорного звена 4. Как показано на ФИГ. 5, скоба 40 может включать в себя открытый конец 40a. Как показано на ФИГ. 6, шарнирный палец 41 может включать в себя сегмент 41a меньшего диаметра. Как показано на ФИГ. 7, шарнирный палец 41 может быть механически соединен, например посредством одной или более пружин 51, с деблокирующим приводом 50, так что деблокирующий привод 50 способен перемещаться в направлении 50a. Перемещение деблокирующего привода 50 приводит к соответствующему перемещению шарнирного пальца 41, так что сегмент 41a шарнирного пальца 41 может совмещаться с открытым концом 40a скобы 40. В результате такого совмещения скоба 40 может механически отсоединяться от наклонной платформы 12, например, путем подъема наклонной платформы 12 вручную. Как показано на ФИГ. 6, в ходе обычной операции наклона сегмент 41a и открытый конец 40a могут не быть совмещены. Как показано на ФИГ. 7, при приведении в действие деблокирующим приводом 50 сегмент 41a и открытый конец 40a могут совмещаться, чтобы обеспечить отсоединение, как описано выше. Легкий доступ к системе 10 наклона и/или любой из ее составных частей может потребоваться для санитарной обработки, очистки и/или обслуживания для обеспечения должного функционирования.
На ФИГ. 8 показан способ 800 поддержания ребенка в терморегулируемой зоне несущего ребенка устройства, используя систему наклона, имеющую наклонную платформу, расположенную под несущим ребенка устройством, наклоняющуюся вокруг оси наклона, первый привод, второй привод, корпус, расположенный под наклонной платформой, а также опорное звено. Реализацию представленного ниже способа 800 следует рассматривать как приведенную в качестве примера. В определенных вариантах осуществления способ 800 может осуществляться с использованием одной или более дополнительных операций, которые не описаны, и/или без одной или более рассмотренных операций. Кроме того, порядок следования операций способа 800, проиллюстрированный на ФИГ. 8 и описанный ниже, не является ограничивающим.
В определенных вариантах осуществления способ 800 может быть реализован с использованием одного или более устройств обработки информации (например, цифрового процессора, аналогового процессора, цифровой схемы, выполненной с возможностью обработки информации, аналоговой схемы, выполненной с возможностью обработки информации, машины состояний и/или других механизмов для электронной обработки информации). Одно или более устройств обработки информации могут включать в себя одно или более устройств, выполняющих некоторые или все операции способа 800 по инструкциям, хранящимся в электронном виде на электронном носителе. Одно или более устройств обработки информации могут включать в себя одно или более устройств, выполненных с возможностью осуществления одной или более операций способа 800 с использованием аппаратного обеспечения, аппаратно-программного обеспечения и/или программного обеспечения.
При выполнении операции 806 опорное звено удерживается корпусом так, что положение опорного звена относительно корпуса регулируется, при этом регулировка положения опорного звена относительно корпуса регулирует поворотное положение наклонной платформы вокруг оси наклона. Регулировка положения опорного звена осуществляется посредством ручного соединителя, соединяющего наклонную платформу с опорным звеном. В некоторых вариантах осуществления операция 806 выполняется корпусом и гайкой, идентичными или аналогичными корпусу 9 и гайке 11 (показанным на ФИГ. 1 и представленным в настоящем описании). В качестве альтернативы и/или одновременно в некоторых вариантах осуществления операция 806 выполняется ручным соединителем, идентичным или аналогичным комбинации скобы 40 и шарнирного пальца 41 (показанной на ФИГ. 4 и представленной в настоящем описании).
При выполнении операции 808 поддержка наклонной платформы осуществляется опорным звеном для поддержания поворотного положения наклонной платформы вокруг оси наклона. В некоторых вариантах осуществления операция 808 выполняется опорным звеном, идентичным или аналогичным опорному звену 4 (показанному на ФИГ. 1 и представленному в настоящем описании).
При выполнении операции 810 наклонная платформа отсоединяется от опорного звена путем восприятия манипуляции посредством ручного соединителя. В некоторых вариантах осуществления операция 810 выполняется ручным соединителем, идентичным или аналогичным комбинации скобы 40, шарнирного пальца 41 и деблокирующего привода 50 (показанной на ФИГ. 5 и представленной в настоящем описании).
В формуле изобретения ни одну из ссылочных позиций, помещенную в скобки, не следует рассматривать как ограничивающую объем притязаний формулы изобретения. Термин «содержащий» или «включающий в себя» не исключает наличия элементов или этапов помимо тех, что перечислены в формуле изобретения. В пункте формулы изобретения, касающемся устройства, в котором перечислены различные средства, некоторые из этих средств могут быть осуществлены одним и тем же элементом аппаратного обеспечения. Неопределенный артикль «a» или «an», предшествующий элементу, не исключает наличия множества таких элементов. В любом пункте формулы изобретения, касающемся устройства, в котором перечислены различные средства, некоторые из этих средств могут быть осуществлены одним и тем же элементом аппаратного обеспечения. Тот факт, что определенные элементы перечислены во взаимноотличных зависимых пунктах формулы изобретения, не указывает на то, что эти элементы не могут быть использованы в сочетании между собой.
Хотя изобретение подробно описано с целью иллюстрации на основе того, что в настоящее время считается наиболее практичными и предпочтительными вариантами осуществления, следует понимать, что такие подробности служат исключительно этой цели, при этом изобретение не ограничено раскрытыми вариантами осуществления, а, наоборот, охватывает модификации и эквивалентные конструкции, не выходящие за границы сущности и объема изобретения. Например, следует понимать, что настоящее изобретение предполагает, что, насколько это возможно, один или более признаков любого варианта осуществления могут быть объединены с одним или более признаками любого другого варианта осуществления.
Группа изобретения относится к медицинской технике и касается систем и способов для наклона медицинских устройств, предназначенных для ухода за детьми раннего возраста, в частности для поддержания целостности окружающей среды вокруг детей в процессе регулировки угла наклона несущего ребенка устройства. Система для наклона несущего ребенка устройства, имеющего терморегулируемую зону, содержит наклонную платформу, выполненную с возможностью расположения под несущим ребенка устройством, корпус, расположенный под наклонной платформой, опорное звено, обеспечивающее опору для наклонной платформы для поддержания угловой ориентации наклонной платформы вокруг оси наклона, привод, выполненный с возможностью регулировки положения опорного звена относительно корпуса, тем самым регулируя угловую ориентацию наклонной платформы, и ручной соединитель, соединяющий наклонную платформу с опорным звеном. Наклонная платформа выполнена с возможностью наклона вокруг оси наклона. Опорное звено удерживается корпусом так, что положение опорного звена относительно корпуса регулируется. Регулировка положения опорного звена относительно корпуса регулирует угловую ориентацию наклонной платформы вокруг оси наклона. Привод расположен и приводится в действие за пределами терморегулируемой зоны несущего ребенка устройства. Ручной соединитель шарнирно соединен с наклонной платформой с помощью шарнирной конструкции. Регулировка положения опорного звена активируется с помощью ручного соединителя, выполненного с возможностью отсоединения наклонной платформы от опорного звена путем восприятия манипуляции. Способ поддержания ребенка с помощью несущего ребенка устройства, используя вышеуказанную систему наклона, заключается в том, что удерживают опорное звено с помощью корпуса так, что положение опорного звена относительно корпуса регулируется посредством активации, воспринимаемой приводом; создают опору для наклонной платформы с помощью опорного звена для поддержания углового положения наклонной платформы вокруг оси наклона; и отсоединяют наклонную платформу от опорного звена путем восприятия манипуляции с помощью ручного соединителя. Регулировка положения опорного звена относительно корпуса регулирует поворотное положение наклонной платформы вокруг оси наклона и активируется посредством ручного соединителя, шарнирно соединенного с наклонной платформой с помощью шарнирной конструкции. Система, выполненная с возможностью поддержания ребенка с помощью несущего ребенка устройства, содержит средство наклона, расположенное под несущим ребенка устройством для наклона несущего ребенка устройства вокруг оси наклона; подъемное средство, занимающее некоторое положение относительно корпуса, расположенного под средством наклона; опорное звено для обеспечения опоры средству наклона для поддержания угловой ориентации средства наклона вокруг оси наклона; привод для восприятия активации; и соединитель для соединения средства наклона с опорным звеном. Положение подъемного средства регулируется, и регулировка положения относительно корпуса регулирует угловую ориентацию средства наклона вокруг оси наклона. Активация привода активирует регулировку положения подъемного средства относительно корпуса, тем самым регулируя угловую ориентацию средства наклона. Соединитель шарнирно соединен со средством наклона с помощью шарнирной конструкции. Регулировка положения подъемного средства относительно корпуса активируется через соединитель, выполненный с возможностью отсоединения средства наклона от опорного звена путем восприятия манипуляции. Изобретения обеспечивают наклон несущего ребенка устройства, имеющего терморегулируемую зону. 3 н. и 12 з.п. ф-лы, 8 ил.
1. Система (10) для наклона несущего ребенка устройства, имеющего терморегулируемую зону, при этом система содержит:
наклонную платформу (12), выполненную с возможностью расположения под несущим ребенка устройством (14), причем наклонная платформа выполнена с возможностью наклона вокруг оси (16) наклона;
корпус (9), расположенный под наклонной платформой;
опорное звено (4), обеспечивающее опору для наклонной платформы для поддержания угловой ориентации наклонной платформы вокруг оси наклона, причем опорное звено удерживается корпусом так, что положение опорного звена относительно корпуса регулируется, при этом регулировка положения опорного звена относительно корпуса регулирует угловую ориентацию наклонной платформы вокруг оси наклона;
привод (15), выполненный с возможностью регулировки положения опорного звена относительно корпуса, тем самым регулируя угловую ориентацию наклонной платформы, причем привод расположен и приводится в действие за пределами терморегулируемой зоны несущего ребенка устройства; и
ручной соединитель (40, 41), соединяющий наклонную платформу с опорным звеном, причем ручной соединитель шарнирно соединен с наклонной платформой с помощью шарнирной конструкции (41),
при этом регулировка положения опорного звена активируется с помощью ручного соединителя, выполненного с возможностью отсоединения наклонной платформы от опорного звена путем восприятия манипуляции.
2. Система по п. 1, в которой ручной соединитель содержит:
скобу (40), соединенную с опорным звеном;
шарнирную конструкцию (41), выполненную с возможностью установки через скобу,
при этом регулировка положения опорного звена активируется посредством механического зацепления между шарнирной конструкцией и скобой.
3. Система по п. 2, дополнительно содержащая горизонтально-подвижный направляющий блок (42), соединенный с наклонной платформой и выполненный с возможностью горизонтального перемещения относительно наклонной платформы, при этом шарнирная конструкция соединена с наклонной платформой посредством соединения с горизонтально-подвижным направляющим блоком, причем горизонтальное перемещение основано на наклоне наклонной платформы.
4. Система по п. 3, в которой скоба включает в себя открытый конец (40а), а шарнирная конструкция включает в себя сегмент (41а) уменьшенного диаметра, причем уменьшенный диаметр выполнен с возможностью прохождения через открытый конец скобы, при этом отсоединение наклонной платформы от опорного звена осуществляется вручную после совмещения сегмента шарнирной конструкции, имеющего уменьшенный диаметр, со скобой.
5. Система по п. 4, дополнительно содержащая деблокирующий привод (50), соединенный с шарнирной конструкцией и выполненный с возможностью совмещения сегмента шарнирной конструкции, имеющего уменьшенный диаметр, со скобой путем восприятия активации.
6. Способ поддержания ребенка с помощью несущего ребенка устройства, используя систему наклона, имеющую наклонную платформу, расположенную под несущим ребенка устройством и наклоняющуюся вокруг оси наклона, привод, опорное звено, ручной соединитель, соединяющий наклонную платформу с опорным звеном, и корпус, расположенный под наклонной платформой, при этом согласно способу:
удерживают опорное звено с помощью корпуса так, что положение опорного звена относительно корпуса регулируется посредством активации, воспринимаемой приводом, при этом регулировка положения опорного звена относительно корпуса регулирует поворотное положение наклонной платформы вокруг оси наклона и активируется посредством ручного соединителя, шарнирно соединенного с наклонной платформой с помощью шарнирной конструкции;
создают опору для наклонной платформы с помощью опорного звена для поддержания углового положения наклонной платформы вокруг оси наклона; и
отсоединяют наклонную платформу от опорного звена путем восприятия манипуляции с помощью ручного соединителя.
7. Способ по п. 6, согласно которому ручной соединитель содержит скобу и шарнирную конструкцию, выполненную с возможностью установки через скобу, соединенную с опорным звеном, при этом регулировка положения опорного звена активируется посредством механического зацепления между шарнирной конструкцией и скобой.
8. Способ по п. 7, согласно которому система наклона дополнительно имеет горизонтально-подвижный направляющий блок, соединенный с наклонной платформой и выполненный с возможностью горизонтального перемещения относительно наклонной платформы, при этом шарнирная конструкция соединена с наклонной платформой посредством соединения с горизонтально-подвижным направляющим блоком, и горизонтальное перемещение горизонтально-подвижного направляющего блока основано на наклоне наклонной платформы.
9. Способ по п. 8, согласно которому скоба включает в себя открытый конец (40а), а шарнирная конструкция включает в себя сегмент (41а) уменьшенного диаметра, выполненный с возможностью установки через открытый конец скобы, при этом наклонную платформу отсоединяют от опорного звена путем совмещения сегмента шарнирной конструкции, имеющего уменьшенный диаметр, со скобой.
10. Способ по п. 9, согласно которому система наклона дополнительно имеет деблокирующий привод, соединенный с шарнирной конструкцией, и совмещение сегмента шарнирной конструкции уменьшенного диаметра со скобой осуществляют путем восприятия активации с помощью деблокирующего привода.
11. Система, выполненная с возможностью поддержания ребенка с помощью несущего ребенка устройства и содержащая:
средство (12) наклона, расположенное под несущим ребенка устройством, для наклона несущего ребенка устройства вокруг оси (16) наклона;
подъемное средство (4), занимающее некоторое положение относительно корпуса (9), расположенного под средством наклона, причем положение подъемного средства регулируется, и регулировка положения относительно корпуса регулирует угловую ориентацию средства наклона вокруг оси наклона;
опорное звено (4) для обеспечения опоры средству наклона для поддержания угловой ориентации средства наклона вокруг оси наклона;
привод (15) для восприятия активации, при этом активация привода активирует регулировку положения подъемного средства относительно корпуса, тем самым регулируя угловую ориентацию средства наклона; и
соединитель (40, 41) для соединения средства наклона с опорным звеном, причем соединитель шарнирно соединен со средством наклона с помощью шарнирной конструкции (41), при этом регулировка положения подъемного средства относительно корпуса активируется через соединитель, выполненный с возможностью отсоединения средства наклона от опорного звена путем восприятия манипуляции.
12. Система по п. 11, в которой соединитель включает в себя скобу, соединенную с подъемным средством, и шарнирную конструкцию, выполненную с возможностью установки через скобу, при этом регулировка положения подъемного средства относительно корпуса активируется посредством механического зацепления между шарнирной конструкцией и скобой.
13. Система по п. 12, дополнительно содержащая горизонтально-подвижный направляющий блок (42), соединенный со средством наклона и выполненное с возможностью горизонтального перемещения относительно средства наклона, при этом шарнирная конструкция соединена со средством наклона посредством соединения с горизонтально-подвижным направляющим блоком, горизонтальное перемещение которого основано на наклоне средства наклона.
14. Система по п. 13, в которой скоба включает в себя открытый конец (40а), и шарнирная конструкция включает в себя сегмент (41а) уменьшенного диаметра, выполненный с возможностью прохождения через открытый конец скобы, при этом отсоединение средства наклона от опорного звена осуществляется вручную путем совмещения сегмента шарнирной конструкции, имеющего уменьшенный диаметр, со скобой.
15. Система по п. 14, дополнительно содержащая деблокирующий привод (50), соединенный с шарнирной конструкцией и выполненный с возможностью совмещения сегмента шарнирной конструкции, имеющего уменьшенный диаметр, со скобой.
| US 6880188 B2, 19.04.2005 | |||
| МАШИНА ДЛЯ ОБВЯЗЫВАНИЯ ТЮКОВ ПОЛОСОВЫМ ЖЕЛЕЗОМ | 1930 |
|
SU38583A1 |
| US 6071228 A, 06.06.2000 | |||
| JP 2001070365 A, 21.03.2001. | |||

