Общая область техники и контакт изобретения
Настоящее изобретение относится к области передачи сигнала, в частности к приему сигнала, модулированного по Q состояниям посредством частотной манипуляции с использованием фильтра Гаусса. В частности, изобретение касается способа демодуляции и декодирования по меньшей мере одного такого принятого сигнала.
При модуляции посредством частотной манипуляции по двум состояниям, называемой также сокращением FSK от английского Frequency-Shift-Keying, логический 0 представляет собой сигнал с частотой f0, и логическая 1 представляет собой сигнал с частотой f1. При модуляции посредством частотной манипуляции по четырем состояниям, называемой также сокращением QFSK от английского Quaternary Frequency-Shift-Keying, каждую из четырех частот, распределенных по ширине полосы, связывают с одним символом.
При модуляции посредством частотной манипуляции с постоянной фазой генератор, управляемый напряжением, задает битовый сигнал. В этом применении между межбитовыми переходами не происходит изменения фазы, откуда выражение «постоянная фаза». Однако, учитывая двоичный характер модулируемого сигнала, происходят быстрые изменения частоты, которые вынуждают использовать широкую полосу.
Для уменьшения этой ширины полосы модуляцию посредством частотной манипуляции предварительно фильтруют при помощи фильтра Гаусса, откуда название «модуляция посредством частотной манипуляции с использованием фильтра Гаусса», обозначаемая также сокращением GFSK от английского Gaussian-Frequency-Shift-Keying.
Фильтр Гаусса уменьшает ширину полосы модулируемого сигнала, а также ширину полосы модулированного сигнала. Следовательно, модуляция GFSK обладает лучшей спектральной эффективностью, чем нормальная модуляция посредством частотной манипуляции. Модуляцию GFSK применяют в рамках стандарта, такого как стандарт Bluetooth или DECT (от английского Digital Enhanced Cordless Telephone, что значит «усовершенствованный цифровой беспроводной телефон»).
Однако модулятор с фильтром Гаусса, а также многопутевой эффект в канале связи, по которому проходит сигнал, приводят к взаимным помехам между символами, поэтому демодуляция сигнала принимает нелинейный характер, который усложняет ее реализацию.
Были предложены различные способы для демодуляции GFSK-модулированных сигналов. Например, в статье "MLSE Based Detection for GFSK Signals with Arbitrary Modulation Index", Michael Speth et al. описан способ декодирования GFSK-сигналов, имеющих случайные индексы модуляции.
Авторы отталкиваются от модели линейной передачи сигнала GFSK, в частности, с моделированием переходной функции h, моделирующей влияние канала передачи. Принятым сигналом GFSK является
с переданной функцией фазы
На практике функцию фазы заменяют ее оценочной величиной аk-1, которую рассчитывают при помощи сетки Витерби и которая основана на решениях, принимаемых на каждом этапе алгоритма Витерби. Метрика для перехода основана на разности между принятым сигналом и сигналом, воспроизведенным на основании ранее рассчитанных состояний.
В статье "A 1mm2 1.3mW GSM/EDGE Digital Baseband Receiver ASIC in 0.1 μm CMOS", Benseker et al. описана демодуляция сигналов типа GMSK (Gaussian minimum-shift keying) при помощи уравнителя MLSE и ставится задача уменьшения сложности вычисления метрик. В этом способе производят оценку импульсной характеристики канала передачи и к принятому сигналу применяют полученный предфильтр с использованием оценочной функции DFSE (Decision-Feedback Sequence Estimator).
В статье "Demodulation of Cochannel FSK Signals Using Joint Maximum Likelihood Sequence Estimation", Michael Ready et al. описан демодулятор JMLSE MEFSK (Joint Maximum Likelihood Sequence Estimation Manchester-encoded frequency-shift-keying) с использованием алгоритма Витерби.
Однако эти способы не являются вполне удовлетворительными, в частности, по причине требований, предъявляемых к материальному обеспечению этих способов. В частности, эти способы не позволяют детектировать сигналы, модулированные по четырем состояниям посредством частотной манипуляции с использованием фильтра Гаусса (QGFSK).
Раскрытие изобретения
Задачей изобретения является обеспечение демодуляции сигналов, модулированных по Q состояниям посредством частотной манипуляции с использованием фильтра Гаусса, например, посредством модуляции GSFK или QGSFK, которая требует минимума материальных ресурсов для осуществления демодуляции при сохранении нормального качества демодуляции и декодирования. Демодулятор используется вместе с уравнителем для наилучшей дискриминации принимаемых символов, искажаемых взаимными помехами между символами.
В связи с этим первым объектом изобретения является способ демодуляции и декодирования по меньшей мере одного принятого сигнала, модулированного по Q состояниям посредством частотной манипуляции с использованием фильтра Гаусса, при этом указанный сигнал принимают из канала связи, и он содержит сообщение, состоящее из символов сообщения, при этом указанный способ отличается тем, что для определения символа сообщения
- производят оценку множества возможных фазовых инкрементов посредством применения линейного фильтра к множеству последовательностей М результатов модуляции по Q состояниям посредством фазовой манипуляции возможных последовательных символов сообщения,
- совокупную фазу предыдущих итераций способа добавляют к каждому из указанных возможных фазовых инкрементов для получения оценочной фазы,
- определяют символ сообщения путем выбора возможных последовательных символов, оценочная фаза которых является наиболее близкой к принятому сигналу.
Согласно первому объекту, изобретение имеет также следующие различные предпочтительные признаки, взятые отдельно или в различных возможных комбинациях:
- когда модуляция посредством частотной манипуляции является модуляцией по двум состояниям посредством частотной манипуляции с использованием фильтра Гаусса, модуляция посредством фазовой манипуляции является модуляцией посредством двоичной фазовой манипуляции BPSK, или
- когда модуляция посредством частотной манипуляции является модуляцией по четырем состояниям посредством частотной манипуляции с использованием фильтра Гаусса, модуляция посредством фазовой манипуляции является модуляцией посредством квадратурной фазовой манипуляции QPSK;
- выбор возможных последовательных символов осуществляют путем применения критерия максимума правдоподобия;
- выбор возможных последовательных символов, оценочная фаза которых является наиболее близкой к принятому сигналу, осуществляют при помощи алгоритма Витерби, сетку которого определяют при помощи линейного фильтра;
- новую совокупную фазу определяют путем добавления к совокупной фазе предыдущих итераций способа фазового инкремента, соответствующего модуляции посредством фазовой манипуляции (В) определенного таким образом символа сообщения, при этом указанная новая совокупная фаза является совокупной фазой для последующей итерации способа;
- линейный фильтр получают путем минимизации, в рамках метода наименьших квадратов, критерия квадратурной погрешности, выражающей разность между результатами модуляции посредством фазовой манипуляции известной последовательности символов сообщения и частью принятого сигнала, соответствующей указанной известной последовательности символов сообщения;
- линейный фильтр является оценкой импульсной характеристики канала связи, моделированного по М коэффициентов;
- моделирование импульсной характеристики канала связи производят с учетом перехода модуляции символов от модуляции посредством фазовой манипуляции (PSK) к модуляции посредством частотной манипуляции (FSK);
- импульсную характеристику канала связи оценивают на основании известной последовательности символов, присутствующей в принятом сигнале, при этом указанный способ содержит следующие этапы:
- выделяют символы, соответствующие известной последовательности символов, содержащейся в принятом сигнале,
- формируют опорный сигнал R при помощи результата модуляций посредством фазовой манипуляции символов известной последовательности,
- формируют матрицу Р на основании составляющих опорного сигнала R,
- определяют матрицу Н, моделирующую импульсную характеристику канала связи путем применения указанной матрицы Р к вектору V, составляющие которого соответствуют символам известной последовательности;
- матрица Р соответствует псевдообращению Пенроуза матрицы Ганкеля М размером (L-M)×M, образованной составляющими опорного сигнала R, где L является числом символов известной последовательности.
Вторым объектом изобретения является также демодулятор-уравнитель, предназначенный для демодуляции и декодирования по меньшей мере одного принятого сигнала, модулированного по Q состояниям посредством частотной манипуляции с использованием фильтра Гаусса, содержащий по меньшей мере одно запоминающее устройство и процессор, при этом указанный процессор выполнен с возможностью осуществления способа, являющегося первым объектом изобретения. Вторым объектом изобретения является также приемник, предназначенный для приема сигнала, GFSK-модулированного по Q состояниям посредством частотной манипуляции с использованием фильтра Гаусса, содержащий вышеупомянутый демодулятор-уравнитель.
Третьим объектом изобретения является компьютерный программный продукт, содержащий программные коды для осуществления этапов вышеупомянутого способа, когда указанную программу исполняет вычислительная система, содержащая по меньшей мере один процессор. Как правило, программный продукт выполнен в виде носителя информации, считываемого компьютером.
Описание чертежей
Другие отличительные признаки, задачи и преимущества изобретения будут более очевидны из нижеследующего описания, представленного исключительно в качестве неограничительного примера, со ссылками на прилагаемые чертежи, на которых:
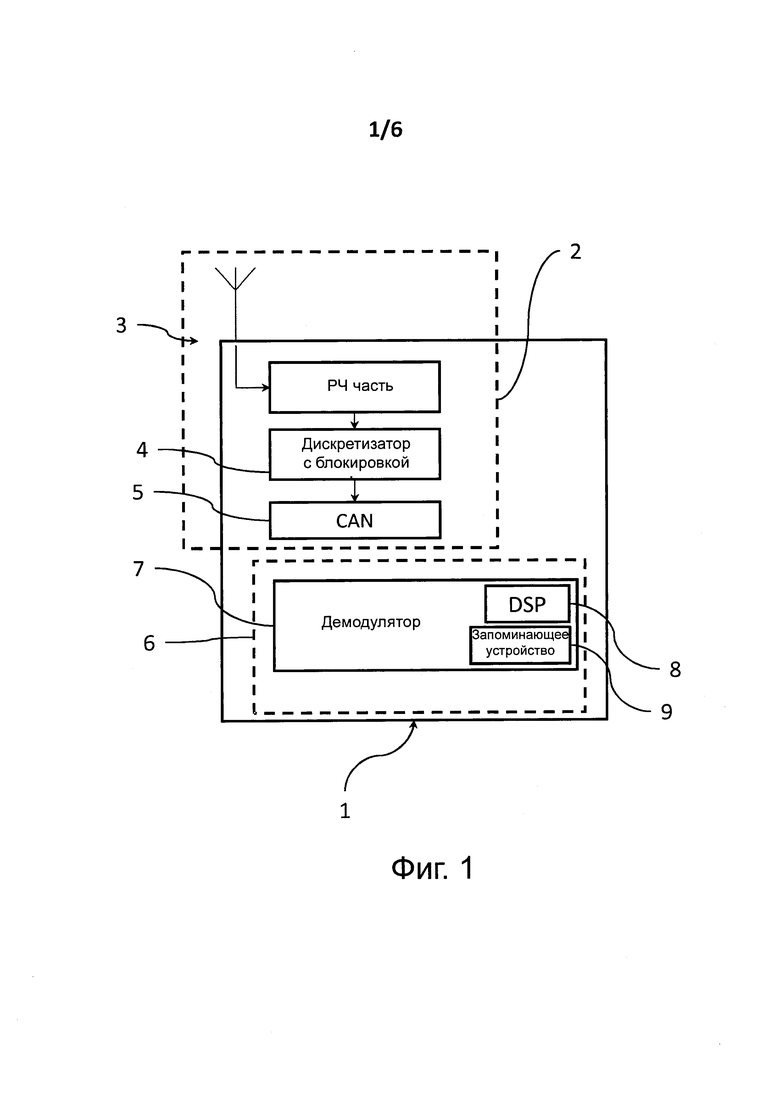
фиг. 1 - схема приемника, оснащенного демодулятором-уравнителем в соответствии с изобретением для осуществления заявленного способа;
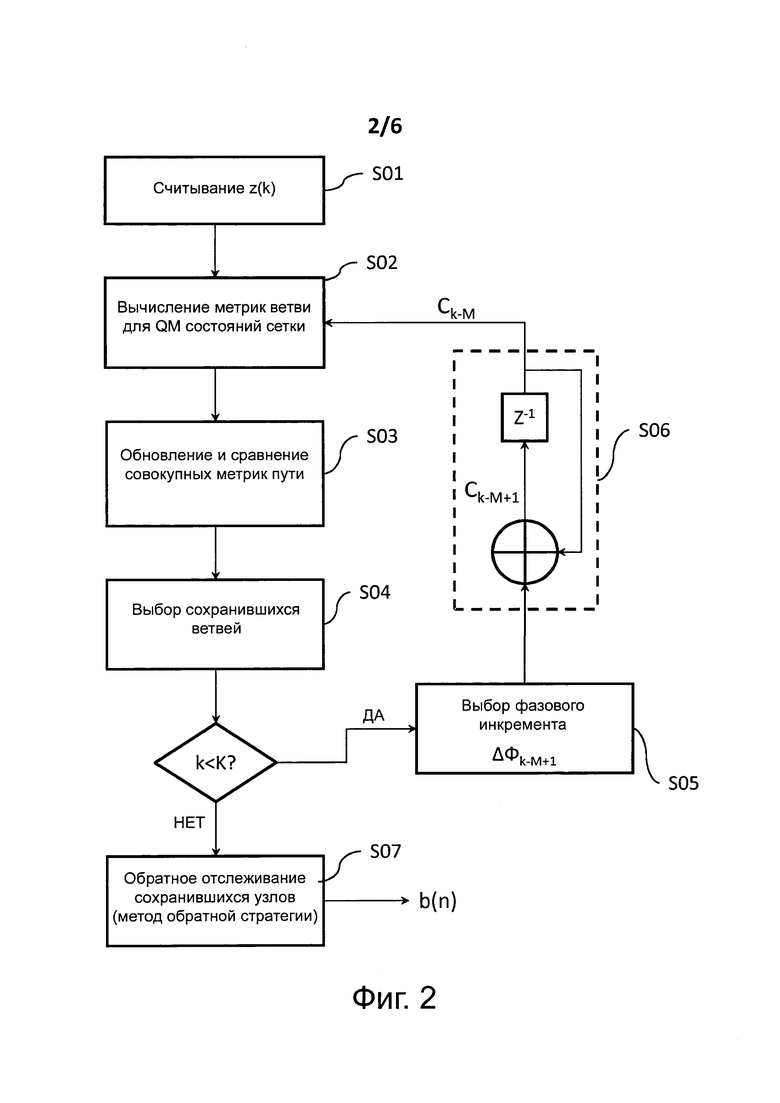
фиг. 2 - принципиальная схема последовательности различных этапов возможного варианта осуществления способа в соответствии с изобретением;
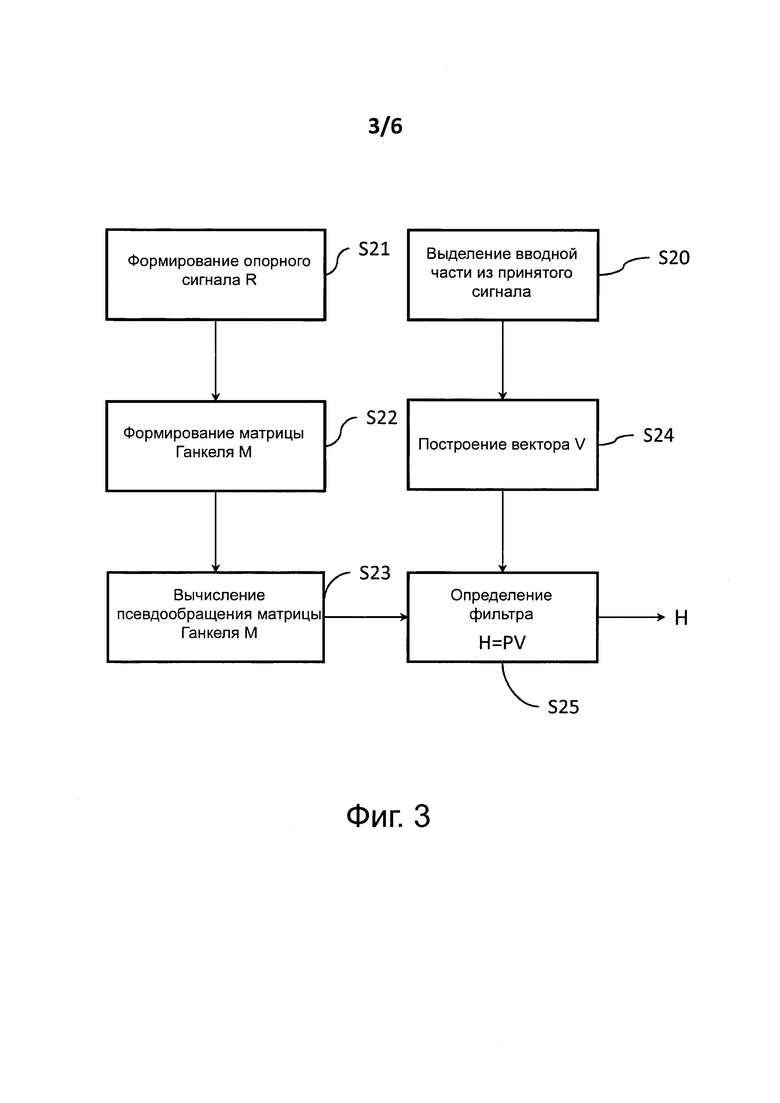
фиг. 3 - принципиальная схема различных этапов возможного варианта определения моделирования канала связи согласно возможному варианту осуществления способа в соответствии с изобретением;
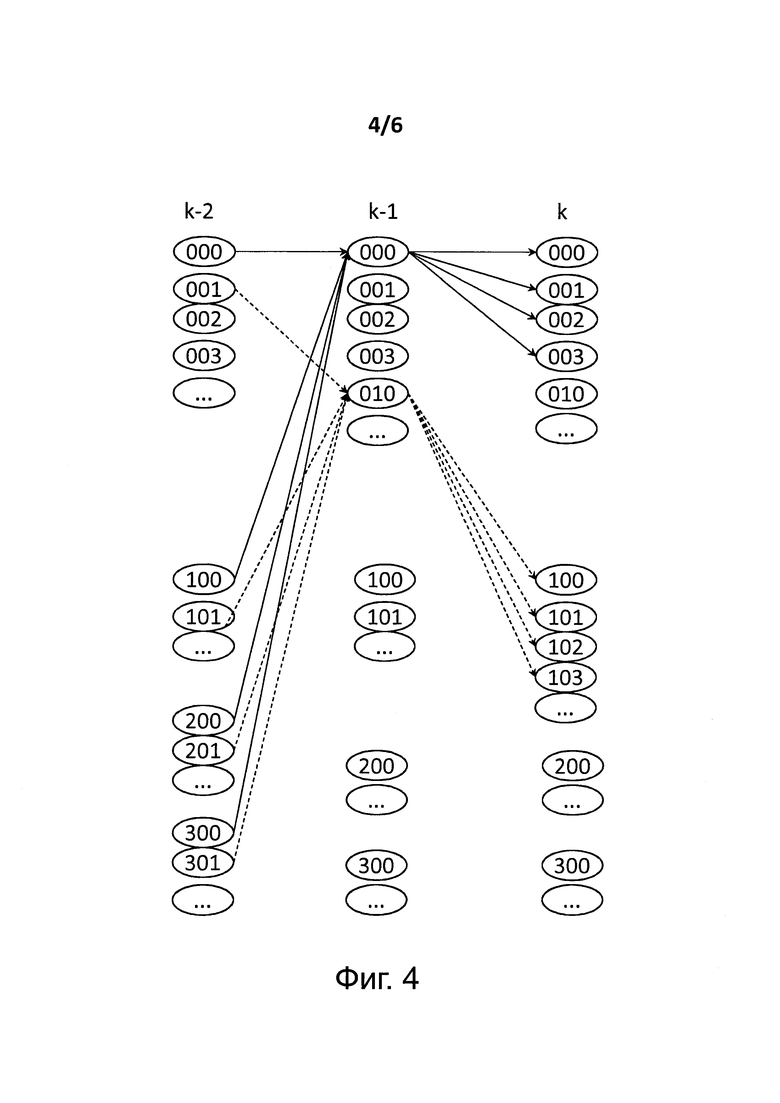
фиг. 4 - схема, частично иллюстрирующая формирование сетки для ее двух узлов;
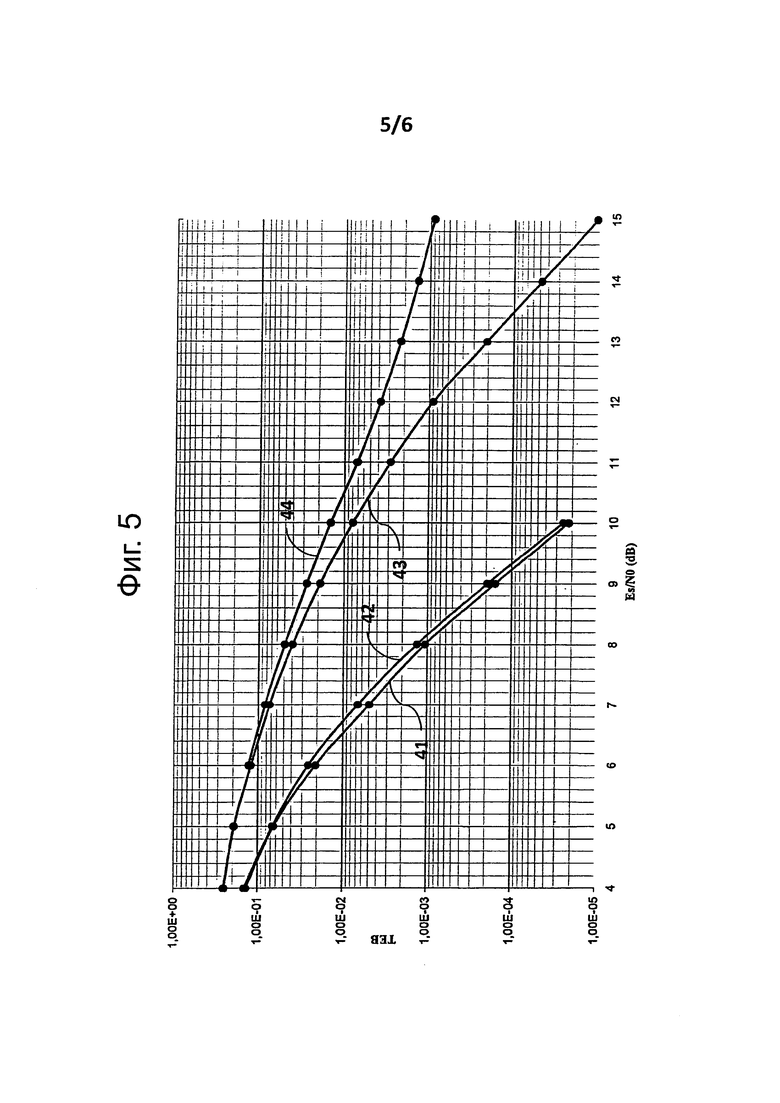
фиг. 5 - график, различные кривые которого иллюстрируют результаты моделирования возможных вариантов осуществления способа в соответствии с изобретением;
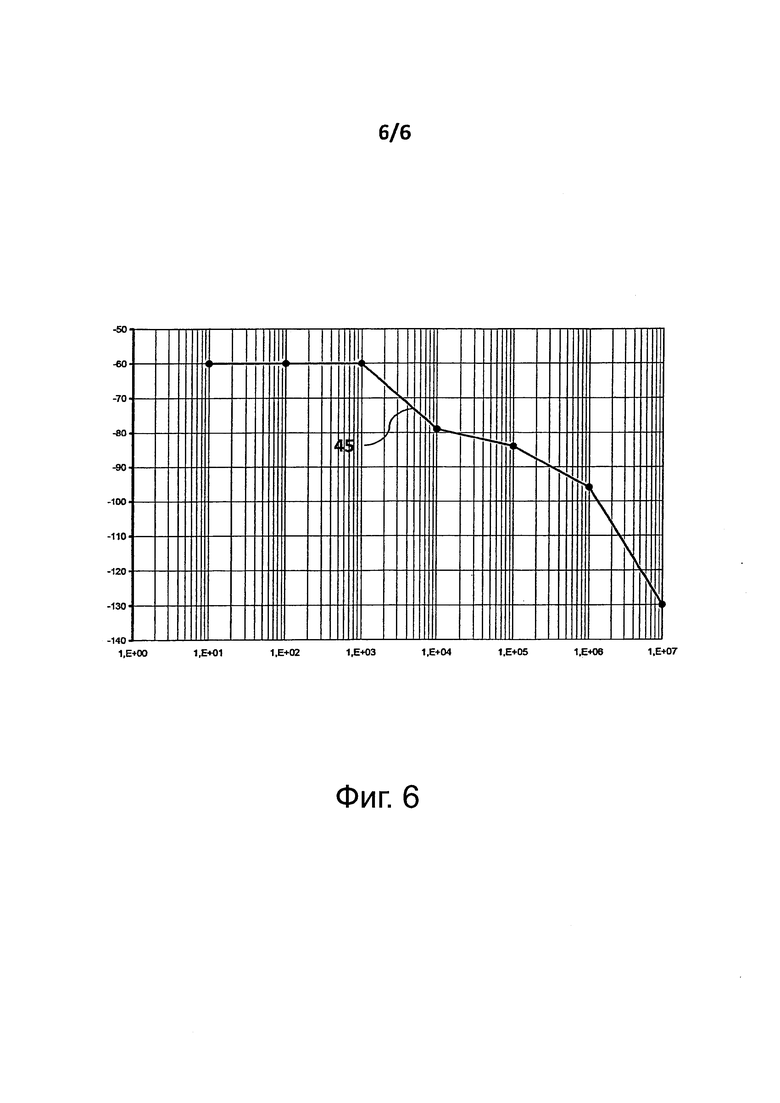
фиг. 6 - график, иллюстрирующий фазовый шум, используемый для некоторых возможных вариантов осуществления способа в соответствии с изобретением, результаты которого показаны на фиг. 5.
Осуществление изобретения
Прием сигнала, модулированного по Q состояниям посредством частотной манипуляции с использованием фильтра Гаусса, осуществляют при помощи приемника 1, имеющего различные функции, необходимые для такого приема. Этот приемник 1 может быть приемопередатчиком, но, поскольку настоящее изобретение относится к приему сигнала, в настоящем описании будет раскрыт только прием при помощи приемника 1, работа которого описана ниже на чисто иллюстративном, хотя и типичном примере.
Сигнал принимают при помощи радиочастотной части 2, содержащей по меньшей мере одну антенну 3, связанную с радиочастотными средствами приема и обработки для приема сигнала, дискретизатор 4 с блокировкой и аналого-цифровой преобразователь 5 для обработки принятого сигнала. Затем принятый сигнал обрабатывают при помощи каскада обработки 6, где он проходит через цифровую фильтрацию, затем обрабатывают, в частности, посредством детектирования фронтов с целью реализации автоматического контроля коэффициента усиления для управления радиочастотной частью.
Приемник осуществляет считывание и поддержание синхронизации и осуществляет при помощи процессора 8 демодулятора-уравнителя 7 демодуляцию сигнала, затем производят расперемежение и декодирование канала, сопровождающееся двоичным подавлением помех, и, наконец, восстанавливают исходный двоичный сигнал.
Демодулятор-уравнитель 7 предназначен для преобразования принятого QGFSK-модулированного сигнала в двоичную последовательность, которая в дальнейшем будет передана в декодер канала. Он содержит по меньшей мере один процессор 8, предпочтительно цифровой процессор обработки сигналов или DSP от английского Digital Signal Processor, и предпочтительно запоминающее устройство 9.
В дальнейшем предполагается, что считывание и частотная и временная синхронизация уже осуществлены и что имеется в наличии фаза принятого сигнала, дискриминированная по частоте символа.
Способ демодуляции в соответствии с изобретением, а также применяющий его демодулятор-уравнитель предназначены для итеративной реконструкции сигнала, модулированного по Q состояниям посредством частотной манипуляции с использованием фильтра Гаусса (GFSK), на основании опорного сигнала, модулированного по Q состояниям посредством частотной манипуляции и фильтрованного при помощи линейного фильтра.
Изобретение использует открытое заявителем уникальное свойство, в соответствии с которым k-й символ сообщения, модулированного посредством частотной манипуляции с использованием фильтра Гаусса, соответствует сумме результатов модуляций посредством фазовой манипуляции этого же сообщения, при этом результаты модуляций взвешивают при помощи коэффициентов линейного фильтра, который моделирует канал связи, включая в него переход от модуляции посредством фазовой манипуляции к модуляции посредством частотной манипуляции.
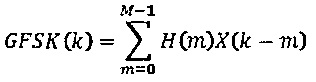
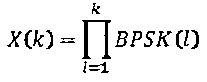
Таким образом, если GFSK(k) обозначает модуляцию посредством частотной манипуляции с использованием фильтра Гаусса по двум состояниям k-го символа сообщения, М обозначает число коэффициентов линейного фильтра, H(m) обозначает m-й коэффициент указанного линейного фильтра, моделирующего импульсную характеристику канала связи, и BPSK(l) обозначает модуляцию посредством двоичной фазовой манипуляции l-го символа исходного сообщения, можно записать следующую формулу:
где

а в случае модуляции по четырем состояниям QGFSK:
где
Таким образом, можно обрабатывать сигнал, модулированный посредством частотной манипуляции с использованием фильтра Гаусса, при помощи модуляции посредством фазовой манипуляции. Знание известной последовательности символов позволяет определить коэффициенты линейного фильтра.
По сути дела, изобретение применяет итеративную реконструкцию принятых сигналов, модулированных посредством частотной манипуляции с использованием фильтра Гаусса, на основании опорных сигналов, модулированных посредством фазовой манипуляции.
Таким образом, согласно изобретению:
- производят оценку множества возможных фазовых инкрементов посредством применения линейного фильтра к множеству последовательностей М результатов модуляции по Q состояниям посредством фазовой манипуляции возможных последовательных символов сообщения,
- совокупную фазу предыдущих итераций способа добавляют к каждому из указанных возможных фазовых инкрементов для получения оценочной фазы,
- определяют символ сообщения путем выбора возможных последовательных символов, оценочная фаза которых является наиболее близкой к принятому сигналу.
Если модуляция посредством частотной манипуляции является модуляцией GFSK по двум состояниям посредством частотной манипуляции с использованием фильтра Гаусса при Q=2, модуляция посредством фазовой манипуляции является модуляцией посредством двоичной фазовой манипуляции BPSK.
Если модуляция посредством частотной манипуляции является модуляцией QGFSK по четырем состояниям посредством частотной манипуляции с использованием фильтра Гаусса при Q=4, модуляция посредством фазовой манипуляции является модуляцией посредством квадратурной фазовой манипуляции QPSK.
Чтобы в достаточной степени учитывать взаимные помехи между символами и в то же время не усложнять способ, выбирают 2≤М≤4. Линейный фильтр с 3 коэффициентами считается достаточным, чтобы предпочтительно М=3.
Предпочтительно выбор возможных последовательных символов осуществляют с применением критерия максимума правдоподобия, например, при помощи алгоритма Витерби, сетку которого определяют при помощи линейного фильтра. Дальнейшее описание относится к варианту осуществления с применением такого критерия.
Как показано на фиг. 2, способ содержит первый этап S01 считывания принятого символа z(k), являющегося частью сигнала, полученного из канала связи.
Демодулятор-уравнитель MLSE (от английского Maximum Likelihood sequence estimation) оценивает переданную последовательность с точки зрения максимума правдоподобия: уравнитель сравнивает принятые последовательности символов с предварительно вычисленными теоретическими последовательностями. Если Q обозначает число состояний используемой схемы модуляции, и N обозначает число принятых символов, то в этом случае необходимо теоретически вычислить евклидовы расстояния между принятой последовательностью и QN последовательностями, которые можно сформировать, и среди последних выбирают последовательность, дающую наименьшее расстояние.
К сожалению сложность этого алгоритма является неприемлемой, поскольку необходимо вычислять QN евклидовых расстояний для каждой принятой последовательности. Вместе с тем, можно значительно уменьшить число необходимых операций, используя алгоритм Витерби (обычно применяемый в сверточных декодерах), если число коэффициентов М линейного фильтра, моделирующего импульсную характеристику канала связи, является таким, что QM≤128.
Действительно, существует аналогия между кодированием канала, осуществляемым на двоичном ряду при помощи сверточного кодера, и прохождением модулированного сигнала через канал связи. Таким образом, аналогично можно создать сетку при помощи коэффициентов моделирования импульсной характеристики канала связи.
Отличительным признаком заявленного способа по сравнению с алгоритмом Витерби является итеративное формирование качественного опорного сигнала параллельно с построением сетки, при этом постепенно получают оценочную двоичную последовательность (она будет полной, только когда будет завершен процесс обновления совокупных метрик пути и выбора сохранившихся ветвей).
В случая модуляции по Q состояниям и канала связи, моделируемого по М состояниям, в каждый момент возможно наличие QM состояний. На основании считывания принятого символа z(k) вычисляют метрики ветвей (этап S02) для QM состояний сетки, которую можно получить при помощи коэффициентов линейного фильтра, моделирующего импульсную характеристику канала связи.
Совокупная фаза в момент k-М, полученная в результате последовательных решений по ранее принятым символам, известна, и ее обозначают Сk-м. Добавив к этой совокупной фазе фазовый инкремент, генерированный при помощи М предварительно фильтрованных возможных последовательных символов с импульсной характеристикой канала связи, демодулятор может вычислить для каждого из М-наборов, которые теоретически можно сформировать, соответствующие значения фазы. Затем с каждым М-набором связывают метрику путем вычисления евклидова расстояния между связанным с ней значением фазы и принятым сигналом.
В качестве примера рассмотрим случай модуляции по четырем состояниями, то есть Q=4, и канала связи, моделируемого при помощи трех коэффициентов (М=3). На фиг. 4 представлен пример построения сетки для трех моментов от k-2 до k, в котором воспроизведены только возможные пути ухода и прихода рядов 000 и 010 в момент k-1.
Для каждого из 64 (QM) рядов из трех символов или триплетов в момент k, таких как 000, 001, каждый из трех коэффициентов, моделирующих канал связи, применяют к одному из трех символов ряда. Если (h0, h1, h2) моделирует канал связи и если (Х1 Х2, Х3) являются тремя символами триплета, образующего ряд, то фазовым инкрементом, создаваемым для трех последних фильтрованных символов с моделированием канала, является ΔФk-2=h0 Х3+h1 Х2+h2 Х1.
В непрерывном режиме работы совокупная фаза Ck-3 известна. К совокупной фазе Сk-3 добавляют соответствующий фазовый инкремент ΔФk-2, чтобы получить связанное с ней значение фазы 


Таким образом, получают метрику, связанную с каждым триплетом.
На этапе S03 обновляют и сравнивают между собой совокупные метрики пути. Затем выбирают сохранившиеся ветви (этап S04). Узел прихода образован последовательностью из М возможных последовательных символов. На Q ветвях, ведущих к каждому узлу прихода, алгоритм Витерби требует сохранения среди них одной и только одной ветви. Сохраняют ветвь, наиболее вероятную с точки зрения критерия максимума правдоподобия (то есть ветвь, для которой сумма метрик ветви и пути от исходного узла является наименьшей). Таким образом, для каждого узла прихода получают новую метрику пути, которую записывают в память для следующей итерации.
Если речь не идет о конце сигнала, то есть если k<K, то выбирают соответствующий фазовый инкремент ΔФk-M+1 (этап S05), чтобы сформировать опорный сигнал Сk-M+1 будущей итерации (этап S06), добавляя указанный фазовый инкремент ΔФk-M+1 к совокупной фазе, образующей использованный перед этим опорный сигнал Сk-м.
Затем выбирают наиболее вероятный узел прихода среди всех узлов прихода. При этом фазовый инкремент, который был использован между итерациями k-М и k-М+1, сразу становится известным, и его используют для формирования будущего опорного сигнала Сk-M+1, на котором будет основана следующая итерация, если речь пойдет о вычислении новых значений фазы, связанных с QM возможными М-наборами.
Наконец, в конце сигнала, k=K, и можно осуществить обратное отслеживание сохранившихся узлов при помощи так называемого метода обратной стратегии ("trace back") (этап S07). Однако этот этап является факультативным. Действительно, особенностью способа по сравнению с алгоритмом Витерби является итеративное формирование качественного опорного сигнала параллельно с выработкой сетки.
Следовательно, постепенно получают оценочную двоичную последовательность (она будет полной, только когда завершится процесс обновления совокупных метрик пути и выбора сохранившихся ветвей), поэтому нет необходимости в осуществлении соответствующего процесса обратного отслеживания сохранившихся узлов.
Для повышения надежности метода "trace back" на конечной сетке и повышения эффективности алгоритма каждый пакет заканчивают известными М символами. Это позволяет с абсолютной уверенностью знать конечный узел, к которому приходят все сохранившиеся пути и, следовательно, выбрать наиболее вероятную ведущую к нему конечную ветвь во время итерации К-М+1. При этом предпочтительно осуществляют полное обратное отслеживание "trace back" сетки с учетом повышения эффективности, обеспечиваемого присутствием известных символов в конце пакета.
Далее со ссылками на фиг. 3 следует описание получения линейного фильтра Н. Линейный фильтр представляет собой моделирование или оценку импульсной характеристики канала связи, через который принят сигнал. Этот канал связи моделируют при помощи М коэффициентов с учетом перехода модуляции символов от модуляции посредством фазовой манипуляции к модуляции посредством частотной манипуляции.
Линейный фильтр получают путем минимизации, в рамках метода наименьших квадратов, критерия квадратурной погрешности, выражающей разность между известной последовательностью символов, модулированных посредством фазовой манипуляции, и частью принятого сигнала, соответствующей указанной известной последовательности символов, модулированных посредством фазовой манипуляции.
Импульсную характеристику канала связи оценивают на основании известной последовательности символов, присутствующей в принятом сигнале, при этом указанная известная последовательность является вводной частью, называемой также полем синхронизации.
Оценка импульсной характеристики начинается (этап S20) с выделения символов вводной части, соответствующей известной последовательности символов, содержащейся в принятом сигнале. Например, вводная часть состоит из L символов b0, b1i, …, bL-1. В случае стандарта DECT: L=32.
Символы узнают при помощи приемника 1, который располагает локальной копией, например, в его запоминающем устройстве 9, или при помощи средства генерирования указанной известной последовательности символов, такого как алгоритм генерирования указанной последовательности.
Эта известная последовательность символов позволяет сформировать (этап S21) опорный сигнал R, сравнение которого с вводной частью позволяет оценить импульсную характеристику канала связи. Этот опорный сигнал формируют при помощи результата модуляций посредством фазовой манипуляции символов известной последовательности
В целом, в случае когда модуляция посредством частотной манипуляции является модуляцией GFSK в сочетании с модуляцией BPSK, Хk оценивают как:
В случае когда модуляция посредством частотной манипуляции является модуляцией QGFSK в сочетании с модуляцией QPSK, Хk оценивают как:
Формируют матрицу Р на основании составляющих опорного сигнала R и определяют матрицу Н, моделирующую импульсную характеристику канала связи, путем применения указанной матрицы Р к вектору V, составляющие которого соответствуют символам вводной части: H=P×V.
Матрица Р соответствует псевдообращению Пенроуза матрицы Ганкеля М размером (L-M)×M, образованной составляющими опорного сигнала R.
Таким образом, на основании составляющих X0-XL-1 формируют (этап S22) матрицу Ганкеля М, состоящую из модулированных символов X0-XL-1 опорного сигнала R. Эта матрица Ганкеля М является не квадратной матрицей, значения которой являются постоянными вдоль восходящих диагоналей. Эта матрица М имеет размер (L-M)×M. Первый столбец этой матрицы М соответствует L-M первых составляющих опорного сигнала, и матрица М имеет следующий вид:
На основании этой матрицы М вычисляют (этап S23) матрицу Р, которая является псевдообращением Пенроуза указанной матрицы Ганкеля М. Матрицу Р вычисляют по следующей формуле Р=(МH×М)-1×МH, где МH является транспонированной сопряженной матрицей.
Таким образом, матрицу Р можно построить путем промежуточных вычислений с использованием матрицы Ганкеля и ее псевдообращения Пенроуза или построить напрямую при помощи модулированных символов X0-XL-1 опорного сигнала R в соответствии с заранее установленной компоновкой, чтобы соответствовать псевдообращению Пенроуза матрицы Ганкеля М.
Затем строят вектор V, составляющие которого соответствуют предварительно выделенным символам вводной части (этап S24).
После этого определяют матрицу Н линейного фильтра, моделирующего канал связи, посредством применения этой матрицы Р к вектору V, составляющие которого соответствуют символам вводной части: H=P×V.
Предпочтительно коэффициенты линейного фильтра, моделирующего канал связи, обновляют для каждого пакета при помощи известной последовательности, используемой в качестве поля синхронизации в начале каждого из пакетов.
Ниже в таблице 1 представлена оценка сложности способа. MIN обозначает использование алгоритма поиска минимума, тогда как CORDIC является аббревиатурой от английского Coordinate Rotation Digital Computer, что значит цифровое вычисление путем вращения координат и соответствует алгоритму вычисления тригонометрической функции.
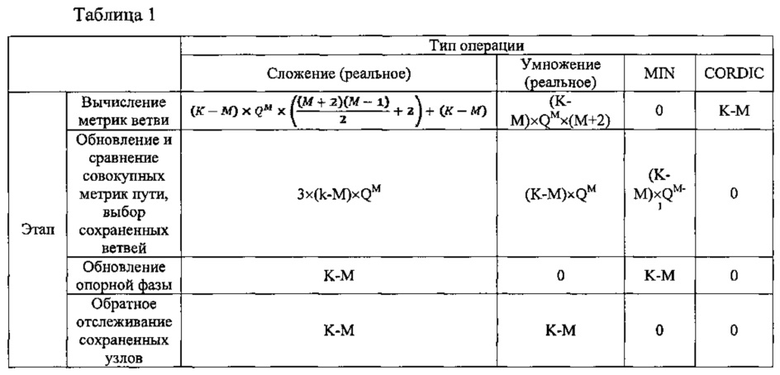
Можно отметить, что способ не является более сложным по сравнению с классическим алгоритмом. Сложность остается в разумных пределах.
Кривые на фиг. 5 иллюстрируют результаты моделирования с применением изобретения. Они показывают степень двоичной погрешности (ТЕВ) в зависимости от отношения сигнала к шуму Es/NO в децибелах.
Кривая 41 соответствует применению изобретения в рамках модуляции GFSK без фазового шума, тогда как кривая 42 соответствует применению изобретения в рамках модуляции GFSK с фазовым шумом. Кривая 43 соответствует применению изобретения в рамках модуляции QGFSK без фазового шума, тогда как кривая 44 соответствует применению изобретения в рамках модуляции QGFSK с фазовым шумом.
Как можно отметить, способ обеспечивает хорошую эффективность, хотя форма модуляции QGFSK является чувствительной к фазовому шуму.
Эти моделирования осуществляют следующим образом:
- используют пакеты по 192 бит, состоящие из вводной части на 32 бит и из полезной нагрузки на 160 бит (взятой случайно согласно стандартному правилу),
- моделируют канал, в случае необходимости, с добавлением белого гауссова шума и фазового шума,
- фазовый шум получают при помощи белого шума, фильтрованного в частотной области при помощи тестируемого профиля фазового шума, показанного на фиг.6 кривой 45, отображающей спектральную плотность мощности (в дБ/Гц) в зависимости от частоты в Гц,
- предполагается, что синхронизация является идеальной,
- демодулятор был применен с плавающей запятой,
- параметрами модуляции являются: h=0,5, ВТ=0,5 для формы GFSK и h=0,25, ВТ=0,5 для формы QGFSK (для этой формы было применено кодирование Грея).
Изобретение относится к области передачи сигнала. Технический результат изобретения заключается в обеспечении демодуляции сигналов, модулированных по Q состояниям посредством частотной манипуляции с использованием фильтра Гаусса, которая требует минимума материальных ресурсов при сохранении хорошего качества демодуляции и декодирования. Способ демодуляции и декодирования принятого из канала связи сигнала, который содержит сообщение, состоящее из символов сообщения, при этом для определения символа сообщения: производят оценку множества возможных фазовых инкрементов посредством применения линейного фильтра к множеству последовательностей М результатов модуляции по Q состояниям посредством фазовой манипуляции возможных последовательных символов сообщения, совокупную фазу предыдущих итераций способа добавляют к каждому из указанных возможных фазовых инкрементов для получения оценочной фазы, определяют символ сообщения путем выбора возможных последовательных символов, оценочная фаза которых является наиболее близкой к принятому сигналу. 4 н. и 9 з.п. ф-лы, 1 табл., 6 ил.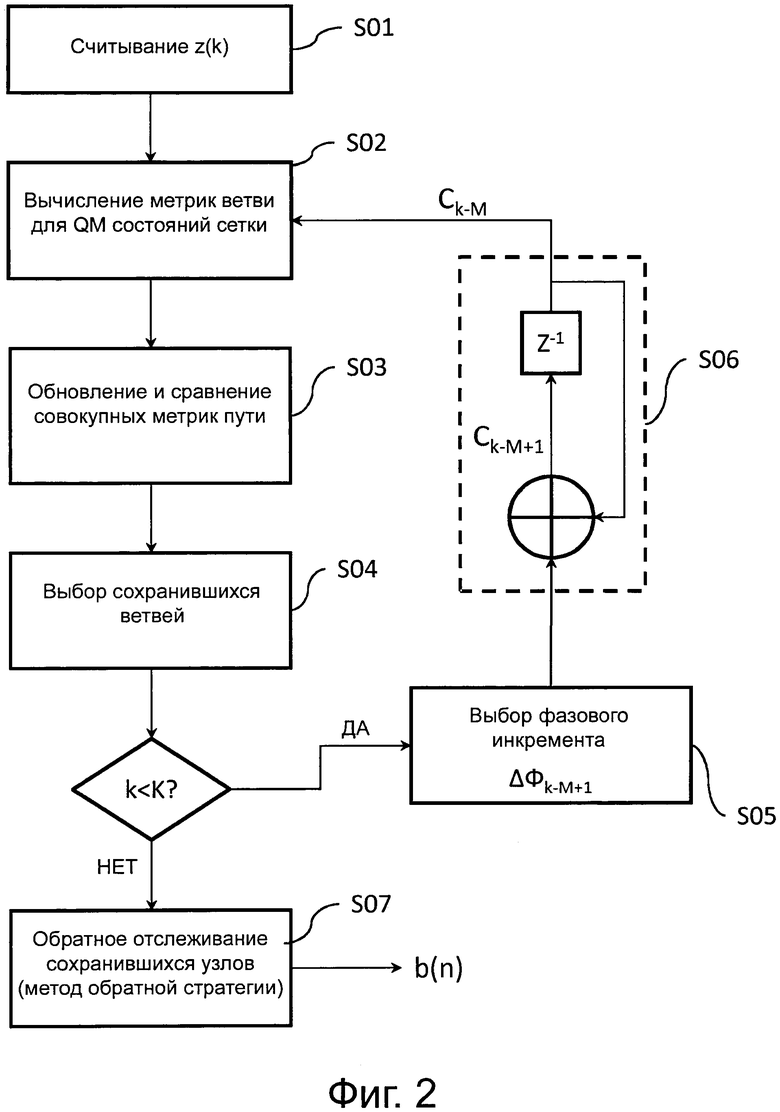
1. Способ демодуляции и декодирования принятого сигнала, модулированного по Q состояниям посредством частотной манипуляции с использованием фильтра Гаусса, при этом указанный сигнал принимают из канала связи, причем сигнал содержит сообщение, состоящее из символов сообщения, при этом для определения символа сообщения:
производят оценку множества возможных фазовых инкрементов посредством применения линейного фильтра к множеству последовательностей М результатов модуляции по Q состояниям посредством фазовой манипуляции возможных последовательных символов сообщения,
совокупную фазу предыдущих итераций способа добавляют к каждому из указанных возможных фазовых инкрементов для получения оценочной фазы,
определяют символ сообщения путем выбора возможных последовательных символов, оценочная фаза которых является наиболее близкой к принятому сигналу,
при этом новую совокупную фазу определяют путем добавления к совокупной фазе предыдущих итераций способа фазового инкремента, соответствующего модуляции посредством фазовой манипуляции определенного таким образом символа сообщения, при этом указанная новая совокупная фаза является совокупной фазой для последующей итерации способа,
причем когда модуляция посредством частотной манипуляции является модуляцией по двум состояниям посредством частотной манипуляции с использованием фильтра Гаусса, модуляция посредством фазовой манипуляции является модуляцией посредством двоичной фазовой манипуляции BPSK, или
когда модуляция посредством частотной манипуляции является модуляцией по четырем состояниям посредством частотной манипуляции с использованием фильтра Гаусса, модуляция посредством фазовой манипуляции является модуляцией посредством квадратурной фазовой манипуляции QPSK.
2. Способ по п. 1, в котором применяют итеративную реконструкцию принятого сигнала, модулированного посредством частотной манипуляции с использованием фильтра Гаусса GFSK или QGFSK, на основании опорных сигналов, модулированных соответственно посредством фазовой манипуляции BPSK или QPSK, при этом k-й символ сообщения, модулированного посредством частотной манипуляции с использованием фильтра Гаусса, соответствует сумме результатов модуляций посредством фазовой манипуляции этого же сообщения, при этом результаты модуляций взвешивают при помощи коэффициентов линейного фильтра, который моделирует канал связи, включая в него переход от модуляции посредством фазовой манипуляции к модуляции посредством частотной манипуляции.
3. Способ по п. 2, в котором
Q=2 и
где
где GFSK(k) обозначает модуляцию посредством частотной манипуляции с использованием фильтра Гаусса по двум состояниям k-го символа сообщения, М обозначает число коэффициентов линейного фильтра, Н(m) обозначает m-й коэффициент указанного линейного фильтра, моделирующего импульсную характеристику канала связи, и BPSK(l) обозначает модуляцию посредством двоичной фазовой манипуляции l-го символа сообщения, или
Q=4 и
где
где QGFSK(k) обозначает модуляцию посредством частотной манипуляции с использованием фильтра Гаусса по четырем состояниям k-го символа сообщения, М обозначает число коэффициентов линейного фильтра, Н(m) обозначает m-й коэффициент указанного линейного фильтра, моделирующего импульсную характеристику канала связи, и QPSK(l) обозначает модуляцию посредством квадратурной фазовой манипуляции l-го символа сообщения.
4. Способ по п. 3, в котором выбор возможных последовательных символов осуществляют путем применения критерия максимума правдоподобия.
5. Способ по любому из пп. 1-4, в котором выбор возможных последовательных символов, оценочная фаза которых является наиболее близкой к принятому сигналу, осуществляют при помощи алгоритма Витерби, сетку которого определяют при помощи линейного фильтра.
6. Способ по любому из пп. 1-4, в котором линейный фильтр получают путем минимизации, в рамках метода наименьших квадратов, критерия квадратурной погрешности, выражающего разность между результатами модуляции посредством фазовой манипуляции известной последовательности символов сообщения и частью принятого сигнала, соответствующей указанной известной последовательности символов сообщения.
7. Способ по любому из пп. 1-4, в котором линейный фильтр является оценкой импульсной характеристики канала связи, моделированного по М коэффициентам.
8. Способ по п. 7, в котором моделирование импульсной характеристики канала связи выполняют с учетом перехода модуляции символов от модуляции посредством фазовой манипуляции к модуляции посредством частотной манипуляции.
9. Способ по п. 7, в котором импульсную характеристику канала связи оценивают на основании известной последовательности символов, присутствующей в принятом сигнале, при этом указанный способ содержит этапы, на которых:
выделяют символы, соответствующие известной последовательности символов, содержащейся в принятом сигнале,
формируют опорный сигнал R при помощи результата модуляций посредством фазовой манипуляции символов известной последовательности,
формируют матрицу Р на основании составляющих опорного сигнала R,
определяют матрицу Н, моделирующую импульсную характеристику канала связи, путем применения указанной матрицы Р к вектору V, составляющие которого соответствуют символам известной последовательности.
10. Способ по п. 9, в котором матрица Р соответствует псевдообращению Пенроуза матрицы Ганкеля М размером (L-M)×M, образованной составляющими опорного сигнала R, где L - число символов известной последовательности.
11. Демодулятор-уравнитель, характеризующийся тем, что выполнен с возможностью демодуляции и декодирования по меньшей мере одного принятого сигнала, модулированного по Q состояниям посредством частотной манипуляции с использованием фильтра Гаусса, содержащий по меньшей мере одно запоминающее устройство и процессор, при этом указанный процессор выполнен с возможностью осуществления способа по любому из пп. 1-10.
12. Приемник, характеризующийся тем, что выполнен с возможностью приема сигнала, GFSK-модулированного по Q состояниям посредством частотной манипуляции с использованием фильтра Гаусса, содержащий демодулятор-уравнитель по п. 11.
13. Считываемый компьютером носитель информации, содержащий команды программного кода для осуществления этапов способа пп. 1-10, когда указанную программу исполняет вычислительная система, содержащая по меньшей мере один процессор.
| SPETH M | |||
| ET AL: "MLSE BASED DETECTION FOR GFSK SIGNALS WITH ARBITRARY MODULATION INDEX", COMMUNICATIONS, 2004 INTERNATIONAL ZURICH SEMINAR ON ZURICH, SWITZERLAND FEB | |||
| Способ использования делительного аппарата ровничных (чесальных) машин, предназначенных для мериносовой шерсти, с целью переработки на них грубых шерстей | 1921 |
|
SU18A1 |
| BENKESER C | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| US 6240142 B1, 29.05.2001 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| ДЕМОДУЛЯТОР ФАЗОМАНИПУЛИРОВАННЫХ СИГНАЛОВ | 2008 |
|
RU2393641C1 |

