[0001] УРОВЕНЬ ТЕХНИКИ
[0002] Данная заявка испрашивает приоритет по предварительной патентной заявке США № 61/624,142, поданной 13 апреля 2012 г., в соответствии с законодательством.
[0003] ОБЛАСТЬ ТЕХНИКИ
[0004] Настоящее изобретение, в целом, относится к оборудованию, используемому в дорогостоящих имущественных объектах, и, в частности, к системам устройств записи данных и событий, используемым в дорогостоящих имущественных объектах.
[0005] ОПИСАНИЕ УРОВНЯ ТЕХНИКИ
[0006] В дорогостоящих имущественных объектах, например локомотивах, горных, грузовых, морских и воинских транспортных средствах и судах, обычно используется бортовое устройство получения и регистрации данных, аналогичное “черному ящику” на самолетах. Типичное бортовое устройство получения и регистрации данных или устройство записи события/данных содержит цифровые и аналоговые вводы, а также мембранные переключатели и датчики давления, которые записывают данные от различных бортовых устройств, содержащих датчики. Эти устройства записи событий/данных регистрируют различные системные параметры, используемые для расследования инцидентов, оценивание производительности бригады, анализа эффективности расходования топлива, планирования обслуживания и прогностической диагностики. Записанные данные могут включать в себя такие параметры, как скорость, пройденное расстояние, местоположение, уровень топлива, обороты двигателя (об/мин), уровни технических жидкостей, параметры операторского управления, давления и внешние условия. Помимо основного события и операционных данных, на многих из упомянутых подвижных имущественных объектов обеспечены также возможности видео- и аудиозаписи событий/данных.
[0007] Основными задачами настоящего изобретения являются обеспечение автоматического обнаружения столкновения, снижение потерь вследствие неправильной работы стрелочных переводов и управления поездом, снижение затрат на топливо за счет исключения избыточного простоя, повышение точность позиционирования, повышение точности прогнозирования расхода топлива на дороге и обеспечение мониторинга колеи в реальном времени.
[0008] Дополнительной задачей настоящего изобретения является дистанционное аварийное предупреждение, объединяющее в себе обнаружение столкновения, обнаружение переворота, видеосъемку и регистрацию действий оператора до и после инцидентов для обеспечения полного анализа инцидентов.
[0009] Другой задачей настоящего изобретения является использование измерений тангажа и крена на основе данных акселерометра для обеспечения точных уровней жидкости в подвижных топливных баках.
[00010] Дополнительной задачей настоящего изобретения является использование неинтрузивного акселерометра для определения состояния запуска/останова двигателя и дополнительных нагрузок на этот двигатель.
[00011] Другой задачей настоящего изобретения является использование данных акселерометра, объединенных с зарегистрированными действиями оператора и GPS-данными местоположения, для точного определения местоположения неблагоприятных условий эксплуатации, например, плохой колеи, бурных морей и плохих дорог.
[00012] Еще одной задачей настоящего изобретения является использование высокоточной GPS, 3-осного цифрового акселерометра, цифрового компаса и 3-осного цифрового гироскопа, объединенных для обеспечения извещений прибытия и отправления на основе счисления пути для подвижных имущественных объектов в условиях, когда сигнал GPS недоступен, например, под тентами или навесами на станциях и в доках.
[00013] СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[00014] Устройство записи и передачи данных на основе ускорения подвижного имущественного объекта варианта осуществления настоящего изобретения, используемое на локомотивах, содержит операционную интеграцию девяти компонентов. Компоненты представляют собой устройство записи событий, аналогичное черному ящику на самолетах, локомотивное устройство записи цифрового видеосигнала, датчик уровня топлива, программное обеспечение датчика уровня топлива, беспроводной блок обработки, плата датчиков инерциальной навигации, программно-аппаратное обеспечение, системное программное обеспечение и систему, охватывающую эти компоненты. Плата датчиков инерциальной навигации включает в себя 3-осный цифровой гироскоп, 3-осный цифровой магнитометр, 3-осный цифровой акселерометр и микроконтроллер. Гироскоп используется для измерения углового ускорения и замедления имущественного объекта, магнитометр используется для измерения магнитных полей, акселерометр используется для измерения линейных ускорений и замедлений, и микроконтроллер используется для обработки данных и осуществления связи между датчиками и беспроводной блок обработки.
[00015] Устройство записи и передачи данных подвижного имущественного объекта осуществляет семь функций: автоматическую ориентацию, автоматическую калибровку компаса, компенсацию топлива с учетом тангажа и крена, экстренное торможение при обнаружении удара, обнаружение неблагоприятных условий эксплуатации, обнаружение работы двигателя и инерциальная навигация (счисление пути).
[00016] Автоматическое обнаружение столкновения предупреждает соответствующий персонал, когда происходит экстренное торможение, и может мгновенно определять, совпадает ли столкновение с событием торможения. Устройство записи и передачи данных подвижного имущественного объекта обеспечивает немедленное извещение о серьезности столкновения, включающее в себя указание события схода с рельсов или переворачивания локомотива.
[00017] Обнаружение неблагоприятных условий эксплуатации снижает потери вследствие неправильной работы стрелочных переводов и управления поездом. Одно обеспечивает предупреждения и сводные отчеты при обнаружении высокоэнергичных ударов при выполнении операций перевода стрелок. Оно также обнаруживает чрезмерное ослабляющее действие, позволяющее контролерам непрерывно оценивать и улучшать движение поездов. Это позволяет снижать загрузку и повреждение оборудование путем идентификации небезопасных тенденций и позволяет пользователям предпринимать немедленные исправительные действия. Непрерывный мониторинг состояния колеи и мониторинг уровней вибрации на всей дороге с целью предупреждения персонала обслуживания колеи о точном местоположении неисправности колеи или стрелки, которая может требовать осмотра и ремонта.
[00018] Обнаружение работы двигателя на основе акселерометра можно использовать как резервный источник, если сигнал работы двигателя еще не доступен из других бортовых систем, как средство снижения затрат на топливо за счет исключения избыточного простоя. Это также повышает точность прогнозирования расхода топлива на дороге путем компенсации наклона локомотива вследствие уклона и чрезмерного возвышения.
[00019] Компенсация топлива с учетом тангажа и крена повышает точность формируемого отчета о расходе топлива. Она обеспечивает простой, универсальный и неинтрузивный способ определения, работает ли двигатель, в то время как локомотив стоит. Повышенная точность обеспечивает улучшенную бизнес-аналитику в реальном времени для поддержки стратегических инициатив, например, интеллектуальной заправки, анализа скорости сгорания, согласования топлива и мониторинг выбросов.
[00020] Инерциальная навигация, или счисление пути, повышает точность позиционирования. Она улучшает высокоточную дифференциальную GPS беспроводного блока обработки за счет усовершенствованного счисления пути при нахождении в депо, на станциях, в туннелях или в любом месте, где сигналы GPS недоступны. Это позволяет с высокой точностью определять время прибытия и отправления на станции, и точное определение местоположения и ориентации локомотива в цеховых зонах повышает эффективность эксплуатации за счет улучшения планирования цеховых работ и производственного потока.
[00021] КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[00022] Настоящее изобретение дополнительно описано со ссылкой на прилагаемые чертежи, в которых:
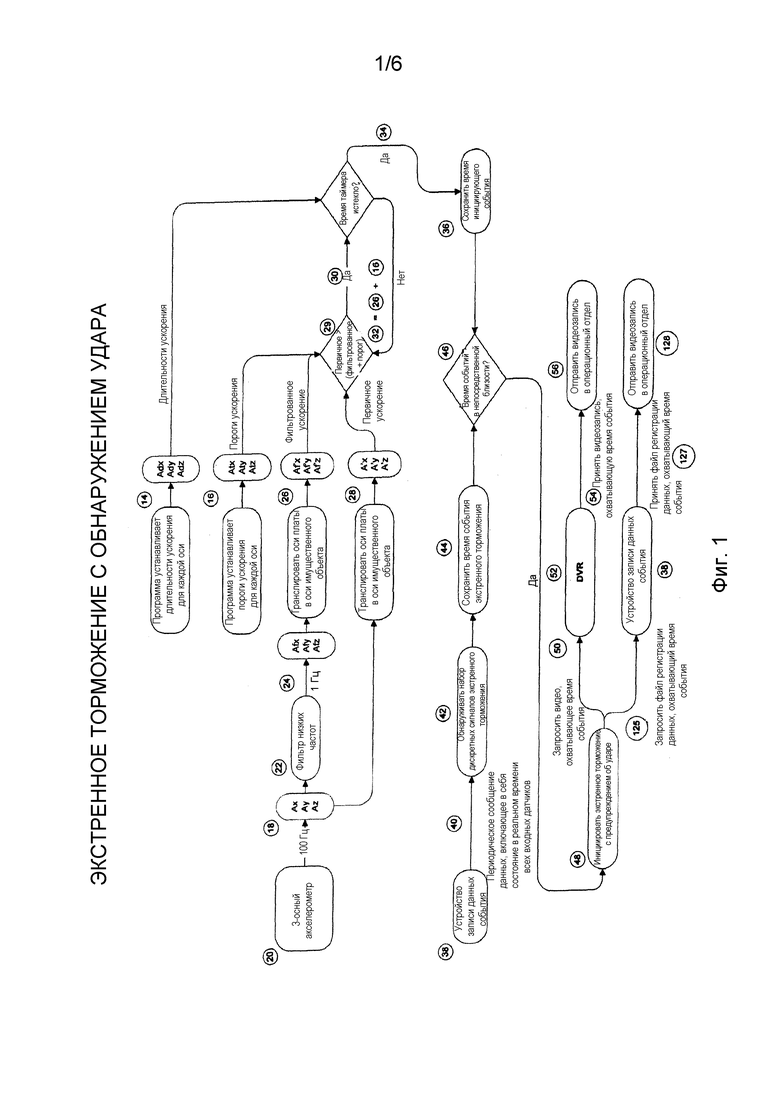
[00023] Фиг. 1 – блок-схема операций, демонстрирующая работу системы экстренного торможения при обнаружении удара настоящего изобретения;
[00024] Фиг. 2 – блок-схема операций, демонстрирующая действие компенсации топлива с использованием тангажа и крена на основе данных акселерометра настоящего изобретения;
[00025] Фиг. 3 – блок-схема операций, демонстрирующая действие обнаружения потенциально неблагоприятных условий эксплуатации с использованием акселерометра настоящего изобретения;
[00026] Фиг. 4 – блок-схема операций, демонстрирующая работу системы обнаружения работающего двигателя с использованием акселерометра настоящего изобретения;
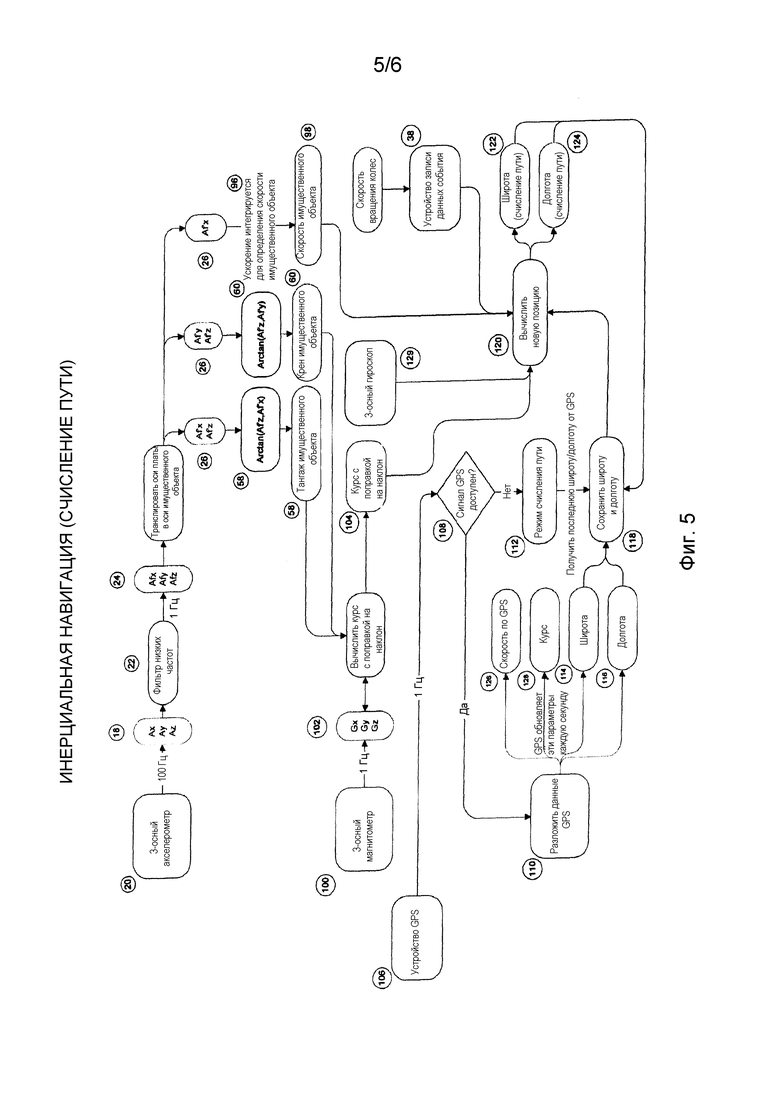
[00027] Фиг. 5 – блок-схема операций, демонстрирующая работу системы инерциальной навигации и счисления пути настоящего изобретения.
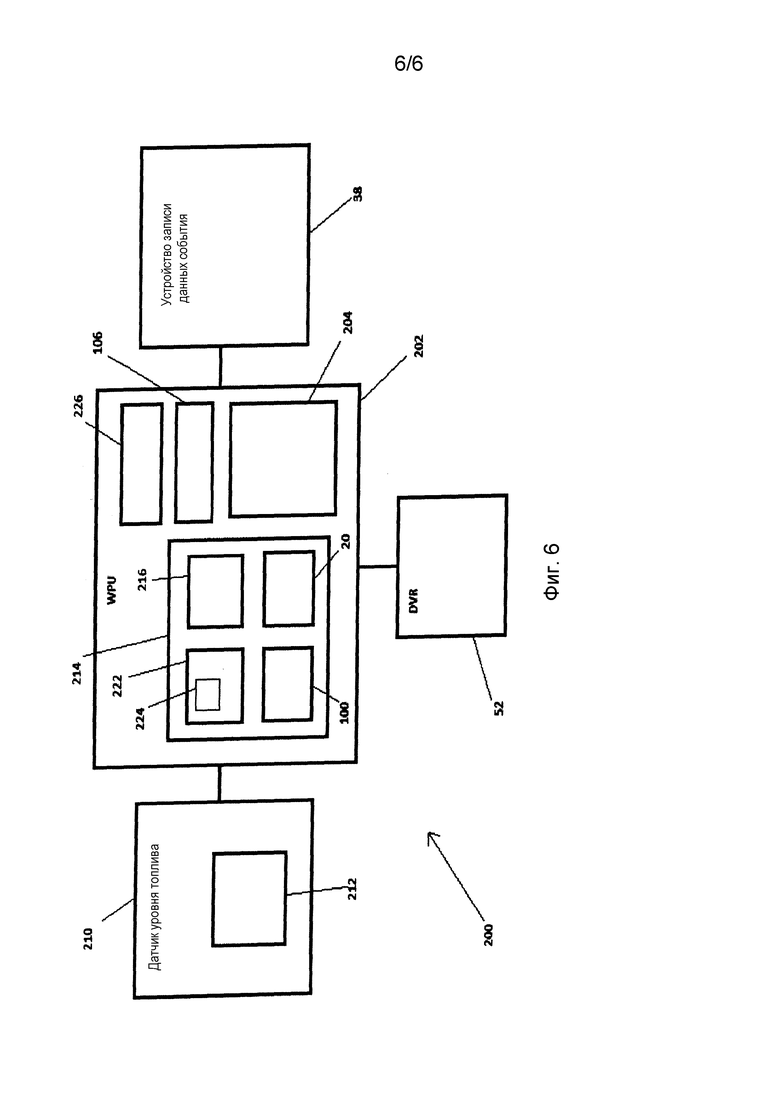
[00028] Фиг. 6 – схема, демонстрирующая системные компоненты варианта осуществления устройства записи и передачи данных подвижного имущественного объекта настоящего изобретения.
[00029] Подробное описание иллюстративных вариантов осуществления
[00030] Система устройства записи и передачи данных подвижного имущественного объекта настоящего изобретения и ее компоненты показаны на Фиг. 6. Система устройства записи и передачи данных подвижного имущественного объекта 200 состоит из десяти взаимосвязанных компонентов: устройства 38 записи данных события, локомотивного устройства 52 записи цифрового видеосигнала (DVR), датчика 210 уровня топлива, программного обеспечения 212 датчика уровня топлива, WPU 202, платы 214 датчиков инерциальной навигации, глобальной системы позиционирования (GPS) 106, программно-аппаратного обеспечения 224, системного программного обеспечения 226 и самой системы 200. Установка WPU 202 на имущественный объект, например локомотив, состоит из монтажа WPU 202 и его внешнего соединения с устройством 38 записи данных события, локомотивным устройством 208 записи цифрового видеосигнала и любыми дополнительными имеющимися устройствами контроля состояния.
[00031] Устройство 38 записи данных события, аналогичное черному ящику на самолетах, является бортовым устройством регистрации данных для локомотивов. Типичное устройство 38 записи данных события состоит из цифровых и аналоговых вводов, а также мембранных переключателей и датчиков давления, которые записывают данные от различных бортовых устройств, например, позицию дросселя, скорость вращения колес и экстренное торможение. WPU 202 принимает и обрабатывает данные от устройства 38 записи данных события каждую секунду по внешнему последовательному соединению.
[00032] Локомотивное устройство 52 записи цифрового видеосигнала (DVR), аналогичное телевизионному DVR, является бортовым устройством видеозаписи. DVR 52 поступает в комплекте с камерой, ориентированной вперед, и микрофоном. Камера смонтирована в такой ориентации, что она видит и записывает то же, что видит машинист. WPU 202 осуществляет доступ к локомотивному DVR 52 через внешнее Ethernet-соединение для загрузки видеозаписи с жесткого диска до, во время и после события.
[00033] Датчик 210 уровня топлива представляет собой датчик, который используется для измерения количества топлива внутри топливного бака. Датчик 210 уровня топлива, используемый в настоящем изобретении, представляет собой ультразвуковой датчик уровня, который использует ультразвуковые акустические волны для определения расстояния между головкой датчика и уровнем топлива. Датчик 210 смонтирован поверх топливного бака с известными размерами и положением монтажа. WPU 202 осуществляет доступ к этим данным через внешнее последовательное соединение.
[00034] Программное обеспечение 212 датчика уровня топлива берет расстояние от уровня топлива до датчика 210 с учетом геометрии топливного бака и преобразует эти данные в устойчивый объем топлива. Это делается путем применения математической фильтрации для снижения шума от колебаний поверхности жидкости и ультразвуковых эффектов в баке. Программное обеспечение 226 также использует интеллектуальные алгоритмы для определений события дозаправки и слива топлива.
[00035] WPU 202 иллюстративного варианта осуществления представляет собой бортовой компьютер повышенной прочности, работающий под Windows XP, предусмотренный, в частности, для промышленного применения. Он имеет много разных особенностей, которые могут быть установлены для адаптации продукта под требования конкретного потребителя. WPU 202 обладает способностью осуществления связи с самыми разнообразными бортовыми системами, включающими в себя, но без ограничения, системы управления транспортного средства, устройства записи данных событий, DVR, датчики уровня топлива и контроллеры двигателя. WPU 202 обладает способностью осуществления связи по самым разнообразным протоколам, включающим в себя, но без ограничения, RS 232, RS 422, RS 485, CAN Bus, LAN, WiFi, сотовый и спутниковый.
[00036] Плата 214 датчиков инерциальной навигации (плата) является аппаратным обновлением для WPU 202. Она установлена внутри и осуществляет связь с WPU 202 через внутренний последовательный порт. Плата 214 состоит из четырех компонентов: 3-осного гироскопа 216, 3-осного магнитометра 100, 3-осного акселерометра 20 и микроконтроллера 222. Гироскоп 216 используется для измерения угловых ускорений, магнитометр 100 используется для измерения магнитных полей, акселерометр 20 используется для измерения линейных ускорений и замедлений, и микроконтроллер 222 используется для обработки данных и осуществления связи между датчиками и WPU 202.
[00037] Программно-аппаратное обеспечение 224 выполняется на микроконтроллере 222 платы 214. Программно-аппаратное обеспечение 224 постоянно вычисляет тангаж и крен с использованием данных 3-осного ускорения 20. Сравнивая данные 3-осного ускорения с программно заданными порогами и длительностями, программно-аппаратное обеспечение 224 может определять, происходит ли инициирующее событие, и если да, отправлять сообщение инициирующего события на WPU 202. Каждую секунду программно-аппаратное обеспечение 224 отправляет на WPU 202 периодическое сообщение данных, содержащее заранее заданное множество значений. Эти данные используется для, но без ограничения, определения курса, внутренней температуры окружающей среды и угловых ускорений.
[00038] Системное программное обеспечение 226 представляет собой приложение, выполняющееся на WPU 202. Это приложение напрямую предписывает 106 GPS и плате 214 собирать соответствующие данные. Помимо этих данных, системное программное обеспечение 226, как и все остальные приложения на WPU 202, использует стандартный протокол связи между процессами для сбора данных из других прикладных программ. Эти другие прикладные программы выполняются на WPU 202 и осуществляют связь с другими устройствами (DVR 52, устройством 38 записи данных события, и т.д.), которые физически подключены к WPU 202. Используя все собранные данные, системное программное обеспечение 226 могут сравнивать данные с заранее заданными порогами и длительностями для определения, произошли ли конкретные события.
[00039] Система 200 состоит из WPU 202 с платой 214, программно-аппаратным обеспечением 224 и установленным системным программным обеспечением 226 и устройством 38 записи данных события, DVR 52 и датчиком 210 уровня топлива. Системное программное обеспечение 226 выполняется на WPU 202, постоянно корректируя уровни топлива и проверяя сообщения события от платы 214 или устройства 38 записи данных события для осуществления действия.
[00040] Система устройства записи и передачи данных подвижного имущественного объекта 200 (Фиг.6) настоящего изобретения осуществляет семь функций: автоматическую ориентацию, автоматическую калибровку компаса, экстренное торможение при обнаружении удара, компенсацию топлива с учетом тангажа и крена, обнаружение неблагоприятных условий эксплуатации, обнаружение работы двигателя и инерциальная навигация (счисление пути). Каждая из этих семи функций проявляется в сигналах, генерируемых 3-осным акселерометром 20.
[00041] Автоматическая ориентация используется для коррелирования осей WPU 202 с осями локомотива, таким образом, что значения, измеренные датчиками, соответствуют осям локомотива. Этот процесс осуществляется программным обеспечением 226 и программно-аппаратным обеспечением 224. Вследствие разных электронных сред на локомотивах компас нужно калибровать для каждого локомотива. Программное обеспечение использует 106 GPS WPU 202 (Фиг. 5, 6) для определения курса локомотива. Затем оно берет измерения из магнитометра 100 и сохраняет их в соответствующей позиции матрицы. Матрица состоит из 360 позиций, по одной на каждый градус курса. Используя эти значения, программное обеспечение 226 WPU 202 может вносить поправку на собственные магнитные поля локомотива и обнаруживать только изменение вследствие магнитного поля земли.
[00042] На Фиг. 1 показана блок-схема операций применения способа для экстренного торможения при обнаружении удара. Программное обеспечение 226 (Фиг. 6) WPU 202 (Фиг. 6) отправляет команды инициализации на программно-аппаратное обеспечение 224 (Фиг. 6) для установления длительностей ускорения по каждой оси (Adx, Ady, Adz) 14, подлежащих использованию для инициирования событий. Эти длительности сохраняются на борту в устройстве, воплощающем систему 200. Программное обеспечение 226 WPU 202 также отправляет команды инициализации на программно-аппаратное обеспечение 224 для установления порогов ускорения по каждой оси (Atx, Aty, Atz) 16, подлежащих использованию для инициирования событий. Эти длительности сохраняются на борту в устройстве, воплощающем систему 200 (Фиг.6). Микроконтроллер 222 (Фиг.6) извлекает первичные данные 3-осного ускорения (Ax, Ay, Az) 18 из акселерометра 20 с частотой 100 Гц. Фильтр 22 низких частот применяется к значениям первичного ускорения (Ax, Ay, Az) 18, что позволяет получить фильтрованные значения ускорения (Afx, Afy, Afz) 24. Оси фильтрованных значений ускорения (Afx, Afy, Afz) 24 платы 214 (Фиг.6) транслируются в оси имущественного объекта (Af’x, Af’y, Af’z) 26. значения первичных значений (Ax, Ay, Az) 18 платы 214 транслируются в оси имущественного объекта (A’x, A’y, A’z) 28. Фильтрованные осевые значения имущественного объекта (Af’x, Af’y, Af’z) 26 суммируются с установленными порогами для каждой оси (Atx, Aty, Atz) 16, и затем этот суммированный порог (Af’tx, Af’ty, Af’tz) 32 непрерывно сравнивается 29 с первичным ускорением по осям имущественного объекта (A’x, A’y, A’z) 28. Когда первичные значения (A’x, A’y, A’z) 28 превышают пороги 32 на одной или более осей, активируется 30 таймер. Когда первичное значение 28 перестает превышать пороги 32 на конкретной оси 30, промежуток времени, в течение которого первичное значение 28 превышает пороги 32, оценивается для определения, превышает ли промежуток времени указанную длительность для этой оси (Adx, Ady, Adz) 14. Если длительность событие не превышает 34 установленной длительности (Adx, Ady, Adz) 14, сохраняется 36 инициирующее событие, включающее в себя особенности, по какой оси, длительность события и время инициирующего события. Параллельно с этим мониторингом, бортовое программное обеспечение 226 (Фиг.6) принимает периодические сообщения 40 данных от бортового устройства 38 записи данных события, которое отслеживает состояние в реальном времени различных входных датчиков. Бортовое программное обеспечение 226 отслеживает периодические сообщения 40 данных и обнаруживает, когда периодическое сообщение 40 данных указывает, что выдан 42 дискретный сигнал экстренного торможения. Бортовое программное обеспечение 226 сохраняет время 44, когда произошло событие экстренного торможения. Если бортовое программное обеспечение 226 сохраняет либо инициирующее событие 36, либо время 44 экстренного торможения, бортовое системное программное обеспечение 226 будет проверять отметку времени каждого события, чтобы посмотреть, находятся ли два последних зарегистрированных события, из инициирующего события 36 или экстренного торможения 44, в непосредственной близости 46. Если обнаружено, что события произошли в непосредственной близости 46, бортовое программное обеспечение 226 инициирует экстренное торможение в связи с предупреждением об ударе 48 и будет запрашивать загрузку 50 устройства записи цифрового видеосигнала, охватывающую время события, у бортового DVR 52 и будет запрашивать файл регистрации данных, охватывающий время события 125 у устройства 38 записи данных события. Бортовое программное обеспечение 226 принимает загруженную видеозапись, охватывающую время 54 события, и файл регистрации данных, охватывающий время 127 события и отправляет оба файла в операционный отдел 56/128.
[00043] Пользователи будут принимать предупреждения, указывающие фактическую силу столкновения, и привело ли столкновение к переворачиванию или сходу с рельсов. Это, совместно с местоположением, определенным с помощью GPS, видеозаписью и непосредственным доступом к информации устройства записи событий, позволяет пользователям точно ретранслировать серьезность и масштаб инцидента первым ответчикам на своем пути к инциденту.
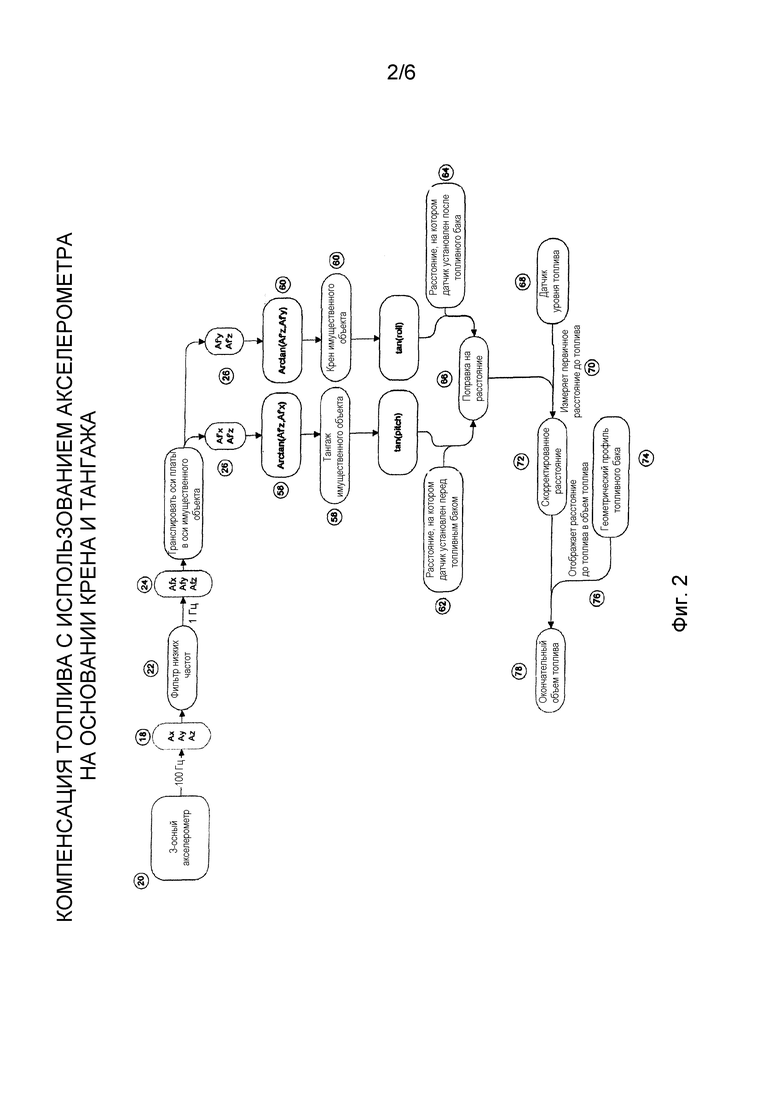
[00044] На Фиг. 2 показана блок-схема операций применения способа для компенсации топлива с использованием тангажа и крена на основе данных акселерометра. Программное обеспечение 226 (Фиг. 6) WPU 202 (Фиг. 6) извлекает первичные данные 3-осного ускорения (Ax, Ay, Az) 18 из акселерометра 20 с частотой 100 Гц. Фильтр 22 низких частот применяется к первичным данным (Ax, Ay, Az) 18, что позволяет получить фильтрованные значения ускорения (Afx, Afy, Afz) 24. Оси фильтрованных значений (Afx, Afy, Afz) 24 платы 214 (Фиг. 6) транслируются в оси имущественного объекта (Af’x, Af’y, Af’z) 26. Тангаж 58 имущественного объекта равен арктангенсу фильтрованной оси x имущественного объекта и фильтрованной оси z имущественного объекта:

Крен 60 имущественного объекта равен арктангенсу фильтрованной оси y имущественного объекта и фильтрованной оси z имущественного объекта:

Для каждой модели имущественного объекта, на котором установлена система, захватывается конкретное местоположение монтажа топливного датчика. В частности, записывается расстояние, на котором датчик смонтирован перед центром топливного бака 62. Кроме того, записывается расстояние, на котором топливный датчик смонтирован за центром топливного бака 64.
[00045] Расстояние перед центром 62 объединяется с тангенсом тангажа имущественного объекта 58 для получения первой поправки на запас топлива. Расстояние за центром 64 объединяется с тангенсом крена имущественного объекта 60 для получения второй поправки на запас топлива. Первая и вторая поправки на запас топлива объединяются для обеспечения единой поправки 66 на запас топлива. Бортовой датчик уровня расстояния записывает расстояние от верхней части бака до уровня топлива, присутствующего в бортовом топливном баке. Первичное расстояние до топлива 70 от топливного датчика 68 объединяется с поправкой 66 на запас топлива для создания скорректированного расстояния 72. Скорректированное расстояние 72 объединяется с ранее заданным геометрическим профилем бака топливного бака 74, который отображает значение расстояния до топлива в объем 76 топлива. Это дает окончательный объем топлива 78, который корректируется по мере перемещения имущественного объекта по различным территориям, в которых тангаж 58 и крен 60 изменяются, компенсируя движение жидкости в баке действующего подвижного имущественного объекта.
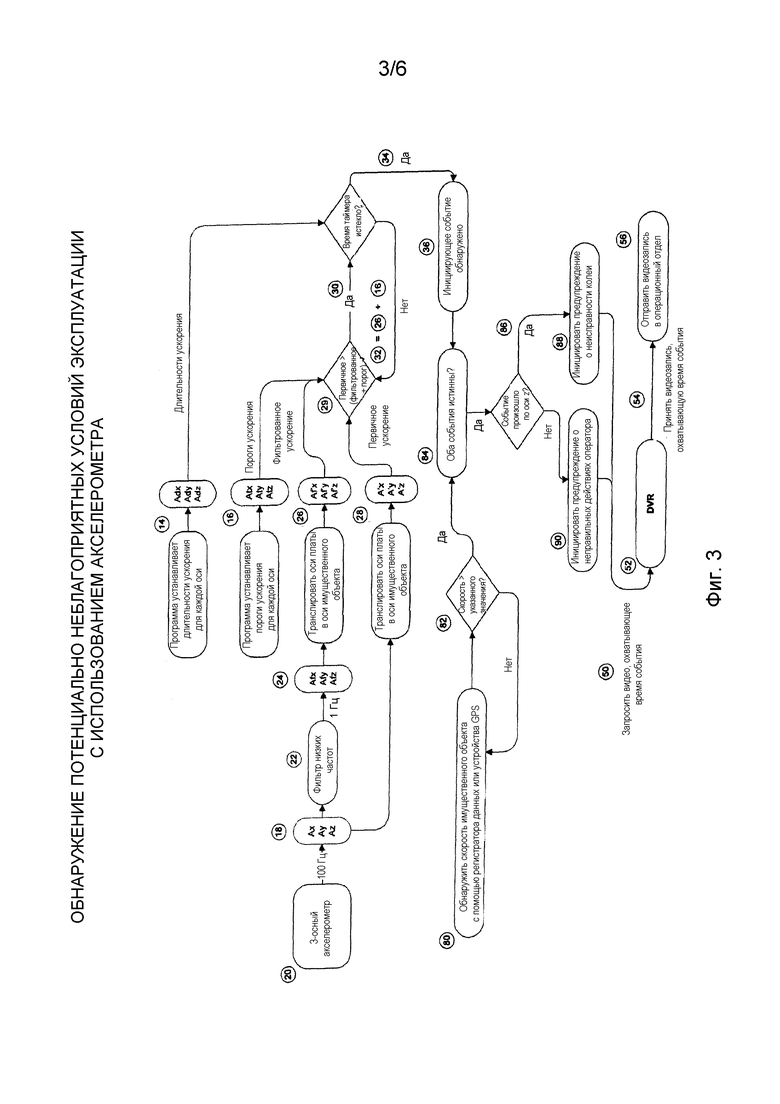
[00046] На Фиг. 3 показана блок-схема операций применения способа для обнаружения потенциально неблагоприятных условий эксплуатации с использованием акселерометра. Программное обеспечение 226 (Фиг. 6) WPU 202 (Фиг. 6) отправляет команды инициализации на программно-аппаратное обеспечение 224 (Фиг. 6) для установления длительностей ускорения по каждой оси (Adx, Ady, Adz) 14, подлежащих использованию для инициирования событий. Эти длительности сохраняются на борту, в устройстве. Программное обеспечение 226 также отправляет команды инициализации на программно-аппаратное обеспечение 224 для установления порогов ускорения по каждой оси (Atx, Aty, Atz) 16, подлежащих использованию для инициирования событий. Эти длительности сохраняются на борту, в устройстве. Микроконтроллер 222 (Фиг. 6) извлекает первичные данные 3-осного ускорения (Ax, Ay, Az) 18 из акселерометра 20 с частотой 100 Гц. Фильтр 22 низких частот применяется к значениям первичного ускорения 18, что позволяет получить фильтрованные значения ускорения (Afx, Afy, Afz) 24. Оси фильтрованных значений 24 платы 214 (Фиг. 6) транслируются в оси имущественного объекта (Af’x, Af’y, Af’z) 26, и оси первичных значений 18 платы 214 транслируются в оси имущественного объекта (A’x, A’y, A’z) 28. Фильтрованные осевые значения имущественного объекта (Af’x, Af’y, Af’z) 26 суммируются с установленными порогами для каждой оси (Atx, Aty, Atz) 16, и затем этот суммированный порог (Af’tx, Af’ty, Af’tz) 32 непрерывно сравнивается 29 с первичным ускорением по осям имущественного объекта (A’x, A’y, A’z) 28. Когда первичное значение 28 превышает порог 32 на одной или более осей, активируется 30 таймер. Когда первичное значение 28 перестает превышать порог 32 на конкретной оси, промежуток времени, в течение которого первичное значение 28 превышает порог 32, оценивается для определения, превышает ли оно указанную длительность для этой оси (Adx, Ady, Adz) 14. Если длительность событие не превышает установленную длительность для этой оси (Adx, Ady, Adz) 14, сохраняется 36 инициирующее событие, включающее в себя особенности, по какой оси, длительность события и время инициирующего события.
[00047] Параллельно с этим мониторингом, бортовое программное обеспечение 226 (Фиг. 6) отслеживает скорость имущественного объекта через периодические сообщения от бортового регистратора 38 данных события (Фиг.1) и/или от бортового устройства 106 GPS (Фиг. 5, 6). Бортовое программное обеспечение 226 отслеживает скорость имущественного объекта 80 и обнаруживает, когда оно превышает указанное значение 82. Если оба события, когда скорость 80 превышает указанное значение 82, и инициирующее событие сохранено 36, происходят одновременно 84, бортовое системное программное обеспечение 226 будет проверять, по какой оси инициировано событие. Если событие инициировано по оси z 86, система будет регистрировать предупреждение 88 о потенциальной неисправности колеи. Если событие инициировано по оси x или y, система будет регистрировать предупреждение 90 о неправильных действиях оператора. При наличии предупреждения 88 о потенциальной неисправности колеи или предупреждения 90 о неправильных действиях оператора, бортовое программное обеспечение 226 будет запрашивать загрузку 50 устройства записи цифрового видеосигнала, охватывающую время события, у бортового DVR 52. Бортовое программное обеспечение 226 принимает загруженную видеозапись 54 и отправляет его в операционный отдел 56.
[00048] Теперь пользователи могут использовать нормальную работу своих подвижных имущественных объектов для точного определения местоположения и предупреждения, в реальном времени, областей, где их имущественные объекты сталкиваются с неблагоприятными условиями эксплуатации, например, плохой колеей/стрелкой, бурными морями и плохими дорогами. Пользователь будет принимать предупреждение, неподвижное или видеоизображение и критические операционные данные черного ящика сразу же после выявления неблагоприятных условий эксплуатации. Ремонтные бригады могут реагировать на точное местоположение плохой дороги или колеи. Морские маршруты можно корректировать во избежание токов стержней или зыбких вод. Эффективность любого ремонта или изменения маршрута можно удостоверить, когда следующий имущественный объект оборудованный системой устройства записи и передачи данных подвижного имущественного объекта, проходит через любую ранее помеченную область.
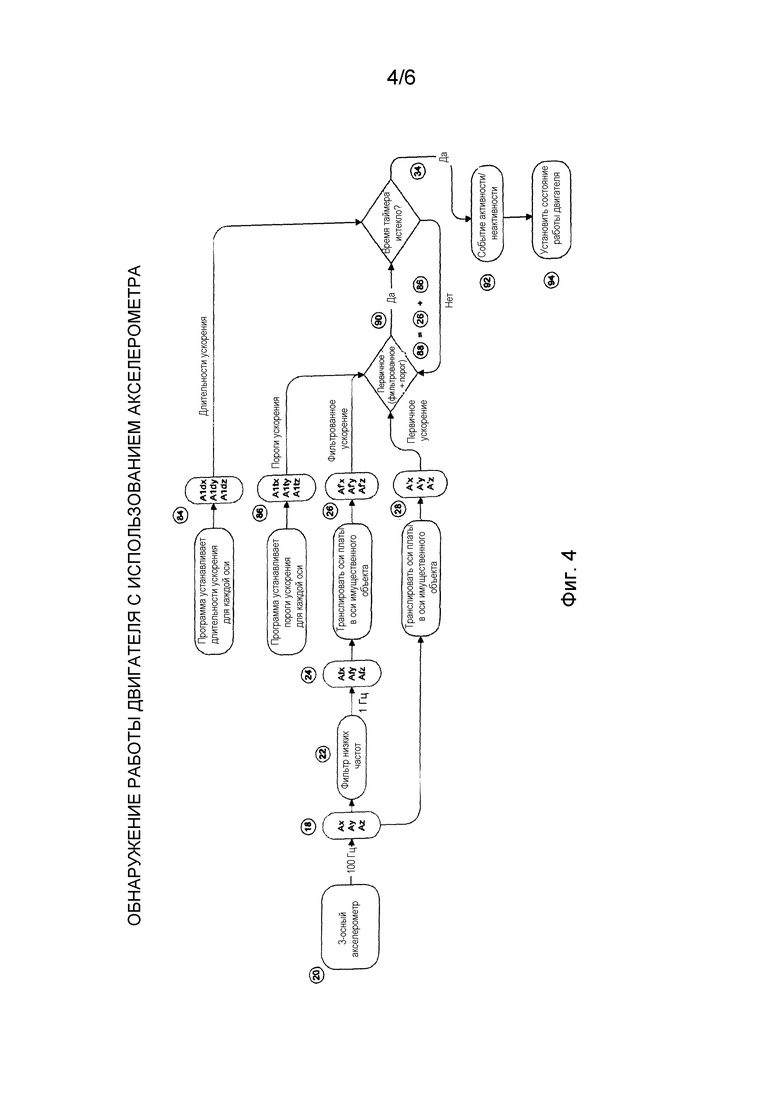
[00049] На Фиг. 4 показана блок-схема операций применения способа для обнаружения работы двигателя с использованием акселерометра. Программное обеспечение 226 (Фиг. 6) WPU 202 (Фиг. 6) отправляет команды инициализации на программно-аппаратное обеспечение 224 (Фиг.6) для установления длительностей активности/неактивности по каждой оси (A1dx, A1dy, A1dz) 84, подлежащих использованию для инициирования событий. Эти длительности сохраняются на борту, в устройстве. программное обеспечение 226 (Фиг. 6) WPU 202 (Фиг. 6) также отправляет команды инициализации на программно-аппаратное обеспечение 224 (Фиг. 6) для установления пороги активности/неактивности по каждой оси (A1tx, A1ty, A1tz) 86, подлежащих использованию для инициирования событий. Эти длительности сохраняются на борту, в устройстве. Микроконтроллер 222 (Фиг. 6) извлекает первичные данные 3-осного ускорения (Ax, Ay, Az) 18 из акселерометра 20 с частотой 100 Гц. Фильтр 22 низких частот применяется к значениям первичного ускорения (Ax, Ay, Az) 18, что позволяет получить фильтрованные значения ускорения (Afx, Afy, Afz) 24. Оси фильтрованных значений 24 платы 214 (Фиг.6) транслируются в оси имущественного объекта (Af’z, Af’y, Af’z) 26, и оси первичных значений 18 платы 214 транслируются в оси имущественного объекта (A’x, A’y, A’z) 28. Фильтрованные осевые значения имущественного объекта (Af’x, Af’y, Af’z) 26 суммируются с установленными порогами активности/неактивности для каждой оси (A1tx, A1ty, A1tz) 86, и затем этот суммированный порог (Af’1tx, Af’1ty, Af’1tz) 88 непрерывно сравнивается с первичным ускорением по осям имущественного объекта (A’x, A’y, A’z) 28. Когда первичное значение 28 превышает порог 88 на одной или более осей, активируется 90 таймер. Если первичное значение 28 перестает превышать порог 88 активности/неактивности на конкретной оси, промежуток времени, в течение которого первичное значение 28 превышает порог 88, оценивается для определения, превышает ли оно указанную длительность для этой оси (A1dx, A1dy, A1dz) 84. Если длительность событие не превышает установленную длительность для этой оси (A1dx, A1dy, A1dz) 84, сохраняется 92 инициирующее событие 34 неактивности/активности, включающее в себя особенности по какой оси, длительность события и время инициирования события. Состояние работы двигатель обновляется 94, когда инициируются события активности/неактивности.
[00050] На Фиг. 5 показана блок-схема операций применения способа для инерциальной навигации (счисления пути). Микроконтроллер 222 (Фиг. 6) извлекает первичные данные 3-осного ускорения (Ax, Ay, Az) 18 из акселерометра 20 с частотой 100 Гц. Фильтр 22 низких частот применяется к значениям первичного ускорения (Ax, Ay, Az) 18, что позволяет получить фильтрованные значения ускорения (Afx, Afy, Afz) 24. Оси фильтрованных значений 24 платы 214 (Фиг. 6) транслируются в оси имущественного объекта (Af’x, Af’y, Af’z) 26. Тангаж 58 имущественного объекта равен арктангенсу фильтрованной оси x имущественного объекта и фильтрованной оси z имущественного объекта:

Крен 60 имущественного объекта равен арктангенсу фильтрованной оси y имущественного объекта и фильтрованной оси z имущественного объекта:

Ускорение по оси x имущественного объекта интегрируется 96 для вычисления скорости 98 имущественного объекта:
 ускорение имущественного объектаось х
ускорение имущественного объектаось х
Параллельно, микроконтроллер 222 (Фиг. 6) извлекает 3-осные гауссовы данные (Gx, Gy, Gz) 102 из магнитометра 100 с частотой 1 Гц. С использованием данных 102 магнитометра и тангажа 58 и крена 60 имущественного объекта, вычисляется курс 104 с поправкой на наклон. Также параллельно, бортовое устройство 106 GPS обеспечивает данные местоположения, обновляемые с частотой 1 Гц. Бортовое программное обеспечение 226 определяет 108, доступны ли верные данные GPS. Если сигнал GPS доступен, бортовое программное обеспечение 226 будет разлагать данные 110 на скорость 126 по GPS, курс 128, широту 114 и долготу 116 каждую секунду и будет сохранять 118 широту 114 и долготу 116. Если определено, что данные GPS недоступны, система 200 (Фиг. 6) входит в режим 112 счисления пути. В режиме 112 счисления пути, последние известные широта 114 и долгота 116 получаются 106 из GPS и сохраняется 118. С использованием последней известной 118 широты 114 и последней долготы 116, совместно со скоростью 98 имущественного объекта, скорость вращения колес из данных 126 устройства записи событий, курса 104 с поправкой на наклон и данных 129 из 3-осного гироскопа, вычисляется новая позиция 120. Новая широта 122 и новая долгота 124 сохраняются и используются, и процесс продолжается, пока снова не будут доступны верные данные GPS.
[00051] Пользователи будут принимать предупреждения о точности и регистрации отправления и прибытия в условиях, когда сигналы GPS блокируются или частично блокируются навесами и тентами. Эта система 200 (Фиг. 6) позволяет пользователям задавать воображаемые ‘разметки указания’ даже в областях, где устройства GPS становятся бесполезными вследствие потерь или помех РЧ сигнала. Возможности инерциальной навигации автоматизируют производительность оператора до матрицы расписания благодаря предупреждению и регистрации точного времени, когда имущественный объект пересекает воображаемая ‘разметка указания’ отправления и прибытия, когда сигнал GPS не позволяет вычислить точные данные местоположения.
[00052] Вышеприведенное описание иллюстративного варианта осуществления изобретения представлено в целях иллюстрации и описания, и не претендует на полноту или ограничение изобретения конкретной раскрытой формой. Описание было выбрано для наилучшего объяснения принципов изобретения и практического применения этих принципов, чтобы другие специалисты в данной области техники могли наилучшим образом использовать изобретение в различных вариантах осуществления и различных модификациях, пригодных для конкретного рассматриваемого использования. Предполагается, что объем изобретения не ограничен описанием изобретения, но задается нижеизложенной формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Телематический прибор | 2019 |
|
RU2736321C1 |
| УСТРОЙСТВО ДЛЯ ОБЛЕГЧЕНИЯ ВОСПОМИНАНИЙ | 2005 |
|
RU2383915C2 |
| СИСТЕМА И СПОСОБ ИСПОЛЬЗОВАНИЯ ОЦЕНОК МЕСТОПОЛОЖЕНИЯ, СКОРОСТИ ИЛИ НАПРАВЛЕНИЯ ПЕРЕДВИЖЕНИЯ ДЛЯ ПОДДЕРЖКИ РЕШЕНИЯ О ПЕРЕДАЧЕ ОБСЛУЖИВАНИЯ | 2004 |
|
RU2387100C2 |
| СИСТЕМА И СПОСОБ ОБРАБОТКИ, СОХРАНЕНИЯ И ПЕРЕДАЧИ ДАННЫХ ОТ ПО МЕНЬШЕЙ МЕРЕ ОДНОГО ПОДВИЖНОГО ОБЪЕКТА | 2021 |
|
RU2839362C1 |
| Способ классификации подвижных объектов наземной техники | 2023 |
|
RU2811811C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ И МОНИТОРИНГА ПРИЧИНЫ ЧРЕЗМЕРНОГО РАСХОДА ТОПЛИВА | 2019 |
|
RU2798078C2 |
| ОПРЕДЕЛЕНИЕ СКОРОСТИ МНОГОМЕРНОГО ПЕРЕМЕЩЕНИЯ В ГЛОБАЛЬНОЙ СИСТЕМЕ КООРДИНАТ | 2013 |
|
RU2629551C2 |
| СИСТЕМА ЗАПИСИ ИНФОРМАЦИИ О ТРАНСПОРТНОМ СРЕДСТВЕ | 2008 |
|
RU2402440C1 |
| Способ контроля пространственного положения участников спортивного события на игровом поле | 2016 |
|
RU2616152C1 |
| СПОСОБ КОНТРОЛЯ КОНТАКТА РЕЛЬСА С КОЛЕСОМ | 2012 |
|
RU2596048C2 |
Техническое решение относится области железнодорожной автоматики и телемеханики. Устройство записи и передачи данных на основе ускорения подвижного имущественного объекта, оборудованное беспроводным блоком обработки, устройством записи событий, устройством записи цифрового видеосигнала, датчиком уровня топлива и платой датчиков инерциальной навигации. Плата датчиков инерциальной навигации включает в себя 3-осный гироскоп, 3-осный акселерометр, 3-осный магнитометр и микроконтроллер. Достигается повышение безопасности движения поезда. 3 н. и 54 з.п. ф-лы, 6 ил.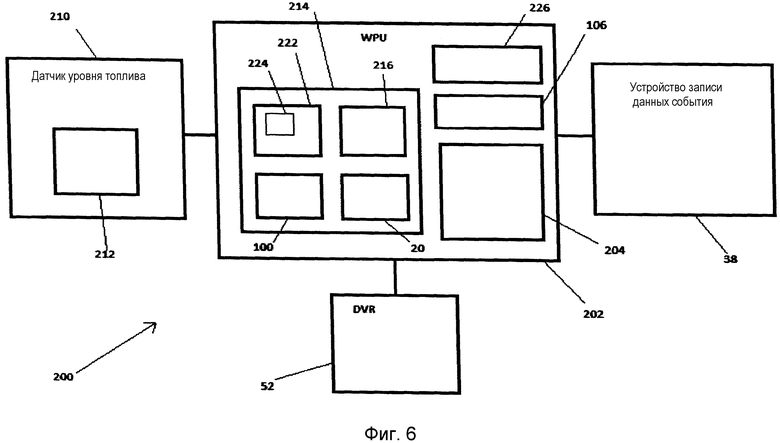
1. Способ записи, обработки и передачи данных от подвижного имущественного объекта, содержащий этапы, на которых:
по меньшей мере одним устройством записи данных события на борту подвижного имущественного объекта отслеживают состояние в реальном времени по меньшей мере одного входного датчика и регистрируют данные, относящиеся к подвижному имущественному объекту;
по меньшей мере одним устройством записи цифрового видеосигнала на борту подвижного имущественного объекта записывают неподвижные изображения, видео и акустические сигналы в реальном времени;
по меньшей мере одну плату датчиков инерциальной навигации устанавливают на борту подвижного имущественного объекта, причем упомянутая плата содержит микроконтроллер, осуществляющий связь с 3-осным акселерометром и обработку данных от него;
считывают первичное значение ускорения по оси х, первичное значение ускорения по оси у и первичное значение ускорения по оси z из 3-осного акселерометра;
фильтруют первичное значение ускорения по оси х, первичное значение ускорения по оси у и первичное значение ускорения по оси z в фильтрованное значение ускорения по оси х, фильтрованное значение ускорения по оси у и фильтрованное значение ускорения по оси z;
транслируют оси платы датчиков инерциальной навигации в оси подвижного имущественного объекта посредством определения транслированного первичного значения ускорения по оси х на основании транслирования первичного значения ускорения по оси х в оси подвижного имущественного объекта, определения транслированного первичного значения ускорения по оси у на основании транслирования первичного значения ускорения по оси у в оси подвижного имущественного объекта и определения транслированного первичного значения ускорения по оси z на основании транслирования первичного значения ускорения по оси z в оси подвижного имущественного объекта; и
транслируют оси платы датчиков инерциальной навигации в оси подвижного имущественного объекта посредством определения транслированного фильтрованного значения ускорения по оси х на основании транслирования фильтрованного значения ускорения по оси х в оси подвижного имущественного объекта, определения транслированного фильтрованного значения ускорения по оси у на основании транслирования фильтрованного значения ускорения по оси у в оси подвижного имущественного объекта и определения транслированного фильтрованного значения ускорения по оси z на основании транслирования фильтрованного значения ускорения по оси z в оси подвижного имущественного объекта.
2. Способ по п. 1, дополнительно содержащий этапы, на которых:
устанавливают длительность ускорения по оси х, длительность ускорения по оси у и длительность ускорения по оси z;
устанавливают порог ускорения по оси х, порог ускорения по оси у и порог ускорения по оси z;
сохраняют длительность ускорения по оси х, длительность ускорения по оси у и длительность ускорения по оси z;
сохраняют порог ускорения по оси х, порог ускорения по оси у и порог ускорения по оси z;
определяют фильтрованное пороговое значение по оси х на основании суммирования транслированного фильтрованного значения ускорения по оси х с порогом ускорения по оси х;
определяют фильтрованное пороговое значение по оси у на основании суммирования транслированного фильтрованного значения ускорения по оси у с порогом ускорения по оси у;
определяют фильтрованное пороговое значение по оси z на основании суммирования транслированного фильтрованного значения ускорения по оси z с порогом ускорения по оси z; и
непрерывно сравнивают фильтрованное пороговое значение по оси х с транслированным первичным значением ускорения по оси х, фильтрованное пороговое значение по оси у с транслированным первичным значением ускорения по оси у и фильтрованное пороговое значение по оси z с транслированным первичным значением ускорения по оси z.
3. Способ по п. 2, дополнительно содержащий этапы, на которых:
активируют таймер, когда происходит по меньшей мере одно из: транслированное первичное значение ускорения по оси х превышает фильтрованное пороговое значение по оси х, транслированное первичное значение ускорения по оси у превышает фильтрованное пороговое значение по оси у, и транслированное первичное значение ускорения по оси z превышает фильтрованное пороговое значение по оси z;
определяют длительность таймера, когда происходит по меньшей мере одно из: транслированное первичное значение ускорения по оси х не превышает фильтрованное пороговое значение по оси х, транслированное первичное значение ускорения по оси у не превышает фильтрованное пороговое значение по оси у, и транслированное первичное значение ускорения по оси z не превышает фильтрованное пороговое значение по оси z, причем упомянутая длительность таймера содержит длительность, в которой по меньшей мере одно из: транслированное первичное значение ускорения по оси х превышало фильтрованное пороговое значение по оси х, транслированное первичное значение ускорения по оси у превышало фильтрованное пороговое значение по оси у, и транслированное первичное значение ускорения по оси z превышало фильтрованное пороговое значение по оси z;
сохраняют инициирующее событие, когда длительность таймера превышает по меньшей мере одно из длительности ускорения по оси х, длительности ускорения по оси у и длительности ускорения по оси z;
отслеживают устройством записи данных события по меньшей мере одно периодическое сообщение данных;
принимают по меньшей мере одно периодическое сообщение данных от устройства записи данных события;
обнаруживают, когда периодическое сообщение данных указывает возникший дискретный сигнал экстренного торможения; и
сохраняют по меньшей мере одно из времени инициирующего события, когда произошло инициирующее событие, и времени торможения и события экстренного торможения, когда возник дискретный сигнал экстренного торможения.
4. Способ по п. 3, дополнительно включающий в себя этапы, на которых:
инициируют экстренное торможение с предупреждением об ударе, когда время инициирующего события и время торможения находятся в непосредственной временной близости;
запрашивают загрузку по меньшей мере одного из файла неподвижного изображения, файла акустического сигнала и цифрового видеосигнала из бортового устройства записи цифрового видеосигнала, причем по меньшей мере один из файла неподвижного изображения, файла акустического сигнала и цифрового видеосигнала записан в заданный период времени до, в течение и после по меньшей мере одного из времени инициирующего события и времени торможения;
принимают по меньшей мере один из файла неподвижного изображения, файла акустического сигнала и цифрового видеосигнала; и
отправляют файл регистрации данных и по меньшей мере один из файла неподвижного изображения, файла акустического сигнала и цифрового видеосигнала в операционный отдел в реальном времени.
5. Способ по п. 4, дополнительно содержащий этап, на котором:
отправляют по меньшей мере одно предупреждение, указывающее по меньшей мере одно из местоположения, определенного с помощью GPS, цифрового видеосигнала, данных от устройства записи данных события, фактической силы, когда произойдет столкновение, и предупреждения переворачивания, когда произойдет переворачивание в результате столкновения, и предупреждения схода с рельсов, когда произойдет сход с рельсов в результате столкновения.
6. Способ по п. 3, в котором инициирующее событие содержит сохранение особенностей по осям, длительности таймера и времени инициирующего события.
7. Способ по п. 3, в котором по меньшей мере одно периодическое сообщение данных содержит по меньшей мере одно состояние в реальном времени по меньшей мере одного входного датчика.
8. Способ по п. 1, дополнительно содержащий этапы, на которых:
по меньшей мере одним датчиком уровня топлива измеряют количество топлива внутри топливного бака;
вычисляют тангаж подвижного имущественного объекта, причем тангаж подвижного имущественного объекта определяется путем применения уравнения:

вычисляют крен подвижного имущественного объекта, причем крен подвижного имущественного объекта определяется путем применения уравнения:

определяют первое расстояние, на котором топливный датчик смонтирован перед центром топливного бака;
определяют второе расстояние, на котором топливный датчик смонтирован слева от центра топливного бака;
вычисляют первую поправку на запас топлива путем объединения первого расстояния с тангенсом тангажа подвижного имущественного объекта;
вычисляют вторую поправку на запас топлива путем объединения второго расстояния с тангенсом крена подвижного имущественного объекта;
вычисляют третью поправку на запас топлива путем объединения первой поправки на запас топлива со второй поправкой на запас топлива;
определяют первичное расстояние от верхней части бака до уровня топлива, присутствующего в топливном баке;
вычисляют скорректированное расстояние путем объединения первичного расстояния с третьей поправкой на запас топлива; и
вычисляют окончательный объем топлива путем объединения скорректированного расстояния с геометрическим профилем топливного бака.
9. Способ по п. 2, дополнительно содержащий этапы, на которых:
по меньшей мере одним датчиком GPS на борту подвижного имущественного объекта принимают сигналы GPS от глобальной системы позиционирования;
по меньшей мере одним устройством записи данных события на борту подвижного имущественного объекта регистрируют данные, относящиеся к подвижному имущественному объекту;
активируют таймер, когда происходит по меньшей мере одно из: транслированное первичное значение ускорения по оси х превышает фильтрованное пороговое значение по оси х, транслированное первичное значение ускорения по оси у превышает фильтрованное пороговое значение по оси у, и транслированное первичное значение ускорения по оси z превышает фильтрованное пороговое значение по оси z;
определяют длительность таймера, когда происходит по меньшей мере одно из: транслированное первичное значение ускорения по оси х не превышает фильтрованное пороговое значение по оси х, транслированное первичное значение ускорения по оси у не превышает фильтрованное пороговое значение по оси у, и транслированное первичное значение ускорения по оси z не превышает фильтрованное пороговое значение по оси z, причем упомянутая длительность таймера содержит длительность, в которой по меньшей мере одно из: транслированное первичное значение ускорения по оси х превышало фильтрованное пороговое значение по оси х, транслированное первичное значение ускорения по оси у превышало фильтрованное пороговое значение по оси у, и транслированное первичное значение ускорения по оси z превышало фильтрованное пороговое значение по оси z;
сохраняют инициирующее событие во время, когда длительность таймера превышает по меньшей мере одно из длительности ускорения по оси х, длительности ускорения по оси у и длительности ускорения по оси z;
принимают по меньшей мере одно периодическое сообщение данных от по меньшей мере одного из устройства записи данных события и датчика GPS, причем по меньшей мере одно периодическое сообщение данных включает в себя скорость подвижного имущественного объекта; и
отслеживают скорость подвижного имущественного объекта, причем скорость имущественного объекта определяется путем применения уравнения:
ƒ ускорение имущественного объектатранслированное фильтрованное значение ускорения по оси х
10. Способ по п. 9, дополнительно содержащий этапы, на которых:
определяют ось инициирования по условию, в котором скорость имущественного объекта превышает указанное значение, во время, когда инициирующее событие было сохранено, причем ось инициирования является осью х, когда длительность таймера превышает длительность ускорения по оси х, ось инициирования является осью у, когда длительность таймера превышает длительность ускорения по оси у, и ось инициирования является осью z, когда длительность таймера превышает длительность ускорения по оси z;
регистрируют предупреждение о потенциальной неисправности колеи, когда ось инициирования является осью z; и
регистрируют предупреждение о неправильных действиях оператора, когда ось инициирования является по меньшей мере одной из оси х и оси у.
11. Способ по п. 10, дополнительно содержащий этап, на котором:
отправляют предупреждения, указывающие любое из неблагоприятных условий эксплуатации, плохих колей и стрелок, бурных морей, плохих дорог, восстановленных маршрутов, местоположения, определенного с помощью GPS, видеозаписей и доступа к информации устройства записи событий.
12. Способ по п. 9, в котором инициирующее событие содержит сохранение особенностей по по меньшей мере одной из оси х, оси у и оси z, длительности таймера и времени, в которое инициирующее событие было сохранено.
13. Способ по п. 9, в котором упомянутое сообщение данных содержит состояние в реальном времени по меньшей мере одного входного датчика.
14. Способ по п. 1, дополнительно содержащий этапы, на которых:
устанавливают длительность активности по оси х, длительность активности по оси у и длительность активности по оси z;
сохраняют длительность активности по оси х, длительность активности по оси у и длительность активности по оси z;
устанавливают порог активности по оси х, порог активности по оси у и порог активности по оси z;
сохраняют порог активности по оси х, порог активности по оси у и порог активности по оси z;
определяют фильтрованное пороговое значение по оси х на основании суммирования транслированного фильтрованного значения ускорения по оси х и порога активности по оси х;
определяют фильтрованное пороговое значение по оси у на основании суммирования транслированного фильтрованного значения ускорения по оси у и порога активности по оси у;
определяют фильтрованное пороговое значение по оси z на основании суммирования транслированного фильтрованного значения ускорения по оси z и порога активности по оси z; и
непрерывно сравнивают фильтрованное пороговое значение по оси х с транслированным первичным значением ускорения по оси х, фильтрованное пороговое значение по оси у с транслированным первичным значением ускорения по оси у и фильтрованное пороговое значение по оси z с транслированным первичным значением ускорения по оси z.
15. Способ по п. 14, дополнительно содержащий этапы, на которых:
активируют таймер, когда происходит по меньшей мере одно из: транслированное первичное значение ускорения по оси х превышает фильтрованное пороговое значение по оси х, транслированное первичное значение ускорения по оси у превышает фильтрованное пороговое значение по оси у, и транслированное первичное значение ускорения по оси z превышает фильтрованное пороговое значение по оси z;
определяют длительность таймера, когда происходит по меньшей мере одно из: транслированное первичное значение ускорения по оси х не превышает фильтрованное пороговое значение по оси х, транслированное первичное значение ускорения по оси у не превышает фильтрованное пороговое значение по оси у, и транслированное первичное значение ускорения по оси z не превышает фильтрованное пороговое значение по оси z, причем упомянутая длительность таймера содержит длительность, в которой по меньшей мере одно из: транслированное первичное значение ускорения по оси х превышало фильтрованное пороговое значение по оси х, транслированное первичное значение ускорения по оси у превышало фильтрованное пороговое значение по оси у, и транслированное первичное значение ускорения по оси z превышало фильтрованное пороговое значение по оси z;
сохраняют одно из инициирующего события активности и инициирующего события неактивности во время, когда длительность таймера превышает по меньшей мере одно из длительности активности по оси х, длительности активности по оси у и длительности активности по оси z; и
обновляют состояние работы двигателя.
16. Способ по п. 15, в котором одно из инициирующего события активности и инициирующего события неактивности содержит сохранение особенностей по по меньшей мере одной из оси х, оси у и оси z, длительности таймера и времени, в которое одно из инициирующего события активности и инициирующего события неактивности было сохранено.
17. Способ по п. 1, дополнительно содержащий этапы, на которых:
осуществляют связь по меньшей мере одного 3-осного магнитометра с микроконтроллером платы датчиков инерциальной навигации, причем упомянутый микроконтроллер обрабатывает данные магнитометра от упомянутого 3-осного магнитометра;
вычисляют тангаж подвижного имущественного объекта, причем тангаж подвижного имущественного объекта определяется путем применения уравнения:

вычисляют крен подвижного имущественного объекта, причем крен подвижного имущественного объекта определяется путем применения уравнения:

вычисляют скорость подвижного имущественного объекта, причем скорость подвижного имущественного объекта определяется путем применения уравнения:
ƒ ускорение имущественного объектатранслированное фильтрованное значение ускорения по оси х
идентифицируют гауссово значение по оси х, гауссово значение по оси у и гауссово значение по оси z на основании данных магнитометра; и
вычисляют курс с компенсацией наклона на основании гауссового значения по оси х, гауссового значения по оси у и гауссового значения по оси z, тангажа подвижного имущественного объекта и крена подвижного имущественного объекта.
18. Способ по п. 17, дополнительно содержащий этапы, на которых:
по меньшей мере одним датчиком GPS на борту подвижного имущественного объекта принимают сигналы GPS от глобальной системы позиционирования;
осуществляют связь по меньшей мере одного 3-осного гироскопа с микроконтроллером платы датчиков инерциальной навигации, причем упомянутый микроконтроллер обрабатывает сигналы данных гироскопа от упомянутого 3-осного гироскопа;
идентифицируют данные GPS, когда сигналы GPS доступны от датчика GPS;
разлагают данные GPS подвижного имущественного объекта на скорость, курс, широту и долготу;
сохраняют упомянутые широту и долготу;
идентифицируют данные гироскопа на основании сигналов данных гироскопа от упомянутого 3-осного гироскопа;
вычисляют новую позицию с использованием упомянутых широты, долготы, скорости подвижного имущественного объекта, по меньшей мере одного из скорости вращения колес и данных события от устройства записи данных события, курса с компенсацией наклона и данных гироскопа, причем новая позиция содержит новую широту и новую долготу; и
сохраняют новую широту и новую долготу.
19. Способ по п. 17, дополнительно содержащий этапы, на которых:
осуществляют связь по меньшей мере одного 3-осного гироскопа с микроконтроллером платы датчиков инерциальной навигации, причем упомянутый микроконтроллер обрабатывает данные гироскопа из упомянутого 3-осного гироскопа;
по меньшей мере одним датчиком GPS на борту подвижного имущественного объекта принимают сигналы GPS от глобальной системы позиционирования;
определяют последнюю известную широту и последнюю известную долготу подвижного имущественного объекта из датчика GPS;
сохраняют последнюю известную широту и последнюю известную долготу подвижного имущественного объекта;
идентифицируют данные гироскопа из 3-осного гироскопа;
вычисляют новую позицию с использованием последней известной широты, последней известной долготы, скорости подвижного имущественного объекта, по меньшей мере одного из скорости вращения колес и данных события от устройства записи данных события, курса с компенсацией наклона и данных гироскопа, причем новая позиция содержит новую широту и новую долготу; и
сохраняют новую широту и новую долготу.
20. Способ по п. 19, дополнительно содержащий этапы, на которых:
регистрируют время новой позиции из новой широты и новой долготы; и
отправляют по меньшей мере одно из предупреждения об отправлении и предупреждения о прибытии.
21. Способ по п. 20, дополнительно содержащий этапы, на которых:
задают по меньшей мере одну из по меньшей мере одной воображаемой разметки указания отправления и по меньшей мере одной воображаемой разметки указания прибытия, причем воображаемая разметка указания отправления содержит
местоположение воображаемой разметки указания отправления, и воображаемая разметка указания прибытия содержит местоположение воображаемой разметки указания прибытия;
регистрируют время отправления, когда новая позиция подвижного имущественного объекта является той же, что и местоположение воображаемой разметки указания отправления, и время прибытия, когда новая позиция подвижного имущественного объекта является той же, что и местоположение воображаемой разметки указания прибытия; и
отправляют предупреждение во время отправления и во время прибытия.
22. Способ по п. 8, в котором датчик уровня топлива представляет собой ультразвуковой датчик уровня, причем
упомянутый ультразвуковой датчик уровня использует ультразвуковые акустические волны для определения расстояния между головкой датчика и уровнем топлива.
23. Способ по п. 1, в котором устройство записи данных события содержит по меньшей мере один цифровой ввод и по меньшей мере один аналоговый ввод.
24. Способ по п. 1, в котором устройство записи данных события содержит по меньшей мере один мембранный переключатель и по меньшей мере один датчик давления.
25. Способ по п. 1, дополнительно содержащий этап, на котором:
по меньшей мере одним датчиком уровня топлива измеряют количество топлива внутри топливного бака.
26. Способ по п. 1, дополнительно содержащий этап, на котором:
калибруют компас на подвижном имущественном объекте.
27. Способ по п. 4, дополнительно включающий в себя этапы, на которых:
запрашивают файл регистрации данных у устройства записи данных события, причем упомянутый файл регистрации данных охватывает по меньшей мере одно из инициирующего события и события экстренного торможения;
принимают файл регистрации данных; и
отправляют файл регистрации данных в операционный отдел в реальном времени.
28. Способ по п. 10, дополнительно включающий в себя этапы, на которых:
запрашивают загрузку цифрового видеосигнала, охватывающую время инициирующего события, из устройства записи цифрового видеосигнала;
принимают загрузку цифрового видеосигнала; и
отправляют загрузку цифрового видеосигнала в операционный отдел.
29. Способ по п. 18, дополнительно включающий в себя этапы, на которых:
регистрируют время новой широты и новой долготы; и
отправляют по меньшей мере одно предупреждение об отправлении и по меньшей мере одно предупреждение прибытии.
30. Способ по п. 29, дополнительно включающий в себя этапы, на которых:
задают по меньшей мере одну из по меньшей мере одной воображаемой разметки указания отправления и по меньшей мере одной воображаемой разметки указания прибытия, причем воображаемая разметка указания отправления содержит местоположение воображаемой разметки указания отправления, и воображаемая разметка указания прибытия содержит местоположение воображаемой разметки указания прибытия;
регистрируют время разметки указания, когда новая позиция подвижного имущественного объекта является той же, что и одно из местоположения воображаемой разметки указания отправления и местоположения воображаемой разметки указания прибытия; и
отправляют предупреждение, когда новая позиция подвижного имущественного объекта является той же, что и одно из местоположения воображаемой разметки указания отправления и местоположения воображаемой разметки указания прибытия.
31. Система для записи, обработки и передачи данных из подвижного имущественного объекта, содержащая:
беспроводной блок обработки, имеющий по меньшей мере одну ось;
по меньшей мере одно устройство записи цифрового видеосигнала на борту подвижного имущественного объекта, причем по меньшей мере одно устройство записи цифрового видеосигнала выполнено с возможностью выполнять по меньшей мере одно из записи и передачи по меньшей мере одного из файла неподвижного изображения, файла видео и файла акустического сигнала в реальном времени;
по меньшей мере одну плату датчиков инерциальной навигации на борту подвижного имущественного объекта, причем упомянутая плата содержит микроконтроллер, осуществляющий связь с 3-осным акселерометром и обработку данных от него;
по меньшей мере одно устройство записи данных события на борту подвижного имущественного объекта, причем по меньшей мере одно устройство записи данных события выполнено с возможностью отслеживать состояние в реальном времени по меньшей мере одного входного датчика и регистрировать данные события, относящиеся к подвижному имущественному объекту;
при этом микроконтроллер выполнен с возможностью выполнять по меньшей мере одного из вычисления тангажа и крена на основании первичного значения ускорения по оси х, первичного значения ускорения по оси у и первичного значения ускорения по оси z из 3-осного акселерометра, определения, когда произойдет по меньшей мере одно инициирующее событие, отправки по меньшей мере одного сообщения об инициирующем событии на беспроводной блок обработки, когда произойдет по меньшей мере одно инициирующее событие, и отправки по меньшей мере одного периодического сообщения данных, содержащего заранее заданное множество значений, на беспроводной блок обработки каждую секунду; и
при этом беспроводной блок обработки выполнен с возможностью выполнять по меньшей мере одного из:
осуществления связи с платой датчиков инерциальной навигации;
автоматической калибровки компаса на подвижном имущественном объекте;
автоматического ориентирования по меньшей мере одной оси беспроводного блока обработки к по меньшей мере одной соответствующей оси подвижного имущественного объекта;
фильтрации первичного значения ускорения по оси х, первичного значения ускорения по оси у и первичного значения ускорения по оси z в фильтрованное значение ускорения по оси х, фильтрованное значение ускорения по оси у и фильтрованное значение ускорения по оси z;
транслирования осей платы датчиков инерциальной навигации в оси подвижного имущественного объекта посредством определения транслированного первичного значения ускорения по оси х на основании транслирования первичного значения ускорения по оси х в оси подвижного имущественного объекта, определения транслированного первичного значения ускорения по оси у на основании транслирования первичного значения ускорения по оси у в оси подвижного имущественного объекта и определения транслированного первичного значения ускорения по оси z на основании транслирования первичного значения ускорения по оси z в оси подвижного имущественного объекта; и
транслирования осей платы датчиков инерциальной навигации в оси подвижного имущественного объекта посредством определения транслированного фильтрованного значения ускорения по оси х на основании транслирования фильтрованного значения ускорения по оси х в оси подвижного имущественного объекта, определения транслированного фильтрованного значения ускорения по оси у на основании транслирования фильтрованного значения ускорения по оси у в оси подвижного имущественного объекта и определения транслированного фильтрованного значения ускорения по оси z на основании транслирования фильтрованного значения ускорения по оси z в оси подвижного имущественного объекта; и
сбора данных из прикладных программ, выполняющихся на беспроводном блоке обработки.
32. Система по п. 31, дополнительно выполненная с возможностью:
отправки команды инициализации для установления длительности ускорения по оси х, длительности ускорения по оси у и длительности ускорения по оси z и для установления порога ускорения по оси х, порога ускорения по оси у и порога ускорения по оси z;
сохранения длительности ускорения по оси х, длительности ускорения по оси у и длительности ускорения по оси z;
сохранения порога ускорения по оси х, порога ускорения по оси у и порога ускорения по оси z;
определения фильтрованного порогового значения по оси х на основании суммирования транслированного фильтрованного значения ускорения по оси х с порогом ускорения по оси х;
определения фильтрованного порогового значения по оси у на основании суммирования транслированного фильтрованного значения ускорения по оси у с порогом ускорения по оси у;
определения фильтрованного порогового значения по оси z на основании суммирования транслированного фильтрованного значения ускорения по оси z с порогом ускорения по оси z; и
непрерывного сравнения фильтрованного порогового значения по оси х с транслированным первичным значением ускорения по оси х, фильтрованного порогового значения по оси у с транслированным первичным значением ускорения по оси у и фильтрованного порогового значения по оси z с транслированным первичным значением ускорения по оси z.
33. Система по п. 32, дополнительно выполненная с возможностью:
активации таймера, когда происходит по меньшей мере одно из: транслированное первичное значение ускорения по оси х превышает фильтрованное пороговое значение по оси х, транслированное первичное значение ускорения по оси у превышает фильтрованное пороговое значение по оси у, и транслированное первичное значение ускорения по оси z превышает фильтрованное пороговое значение по оси z;
определения длительности таймера, когда происходит по меньшей мере одно из: транслированное первичное значение ускорения по оси х не превышает фильтрованное пороговое значение по оси х, транслированное первичное значение ускорения по оси у не превышает фильтрованное пороговое значение по оси у, и транслированное первичное значение ускорения по оси z не превышает фильтрованное пороговое значение по оси z, причем упомянутая длительность таймера содержит длительность, в которой по меньшей мере одно из: транслированное первичное значение ускорения по оси х превышало фильтрованное пороговое значение по оси х, транслированное первичное значение ускорения по оси у превышало фильтрованное пороговое значение по оси у, и транслированное первичное значение ускорения по оси z превышало фильтрованное пороговое значение по оси z;
сохранения инициирующего события, когда длительность таймера превышает по меньшей мере одно из длительности ускорения по оси х, длительности ускорения по оси у и длительности ускорения по оси z;
отслеживания устройством записи данных события по меньшей мере одного периодического сообщения данных;
приема по меньшей мере одного периодического сообщения данных от устройства записи данных события;
обнаружения, когда по меньшей мере одно периодическое сообщение данных указывает возникший дискретный сигнал экстренного торможения; и
сохранения по меньшей мере одного из времени, когда произошло инициирующее событие, и времени торможения и события экстренного торможения, когда возник дискретный сигнал экстренного торможения.
34. Система по п. 33, дополнительно выполненная с возможностью:
инициирования экстренного торможения с предупреждением об ударе, когда время инициирующего события и торможение находятся в непосредственной временной близости;
запроса загрузки по меньшей мере одного из файла неподвижного изображения, файла акустического сигнала и файла видео из бортового устройства записи цифрового видеосигнала, причем по меньшей мере один из файла неподвижного изображения, файла акустического сигнала и файла видео записан в заданный период времени до, в течение и после по меньшей мере одного из времени инициирующего события и времени торможения;
приема по меньшей мере одного из файла неподвижного изображения, файла акустического сигнала и файла видео; и
отправки по меньшей мере одного из файла неподвижного изображения, файла акустического сигнала и файла видео в операционный отдел в реальном времени.
35. Система по п. 34, дополнительно выполненная с возможностью отправки по меньшей мере одного предупреждения, указывающего по меньшей мере одно из местоположения, определенного с помощью GPS, цифрового видеосигнала, данных от устройства записи данных события, фактической силы, когда произойдет столкновение, и предупреждения переворачивания, когда произойдет переворачивание в результате столкновения, и предупреждения схода с рельсов, когда произойдет сход с рельсов в результате столкновения.
36. Система по п. 33, в которой инициирующее событие содержит особенности по осям, длительность таймера и время инициирующего события.
37. Система по п. 33, в которой по меньшей мере одно периодическое сообщение данных содержит по меньшей мере одно состояние в реальном времени по меньшей мере одного входного датчика.
38. Система по п. 31, дополнительно выполненная с возможностью:
измерения количества топлива внутри топливного бака подвижного имущественного объекта после приема сигнала от по меньшей мере одного датчика уровня топлива;
вычисления тангажа подвижного имущественного объекта, причем тангаж подвижного имущественного объекта определяется путем применения уравнения:

вычисления крена подвижного имущественного объекта, причем крен подвижного имущественного объекта определяется путем применения уравнения:

определения первого расстояния, на котором топливный датчик смонтирован перед центром топливного бака;
определения второго расстояния, на котором топливный датчик смонтирован слева от центра топливного бака;
вычисления первой поправки на запас топлива путем объединения первого расстояния с тангенсом тангажа подвижного имущественного объекта;
вычисления второй поправки на запас топлива путем объединения второго расстояния с тангенсом крена подвижного имущественного объекта;
вычисления третьей поправки на запас топлива путем объединения первой поправки на запас топлива со второй поправкой на запас топлива;
определения первичного расстояния от верхней части бака до уровня топлива, присутствующего в топливном баке;
вычисления скорректированного расстояния путем объединения первичного расстояния с третьей поправкой на запас топлива; и
вычисления объема топлива путем объединения скорректированного расстояния с геометрическим профилем топливного бака.
39. Система по п. 32, дополнительно выполненная с возможностью:
приема сигналов глобальной системы позиционирования (GPS) от по меньшей мере одного датчика GPS на борту подвижного имущественного объекта;
активации таймера во время запуска, когда происходит по меньшей мере одно из: транслированное первичное значение ускорения по оси х превышает фильтрованное пороговое значение по оси х, транслированное первичное значение ускорения по оси у превышает фильтрованное пороговое значение по оси у, и транслированное первичное значение ускорения по оси z превышает фильтрованное пороговое значение по оси z;
определения длительности таймера, когда происходит по меньшей мере одно из: транслированное первичное значение ускорения по оси х не превышает фильтрованное пороговое значение по оси х, транслированное первичное значение ускорения по оси у не превышает фильтрованное пороговое значение по оси у, и транслированное первичное значение ускорения по оси z не превышает фильтрованное пороговое значение по оси z, причем упомянутая длительность таймера содержит длительность, в которой по меньшей мере одно из: транслированное первичное значение ускорения по оси х превышало фильтрованное пороговое значение по оси х, транслированное первичное значение ускорения по оси у превышало фильтрованное пороговое значение по оси у, и транслированное первичное значение ускорения по оси z превышало фильтрованное пороговое значение по оси z;
сохранения инициирующего события во время, когда длительность таймера превышает по меньшей мере одно из длительности ускорения по оси х, длительности ускорения по оси у и длительности ускорения по оси z;
определения скорости подвижного имущественного объекта на основании по меньшей мере одного периодического сообщения данных, принятого от по меньшей мере одного из устройства записи данных события и датчика GPS; и
отслеживания скорости подвижного имущественного объекта, причем упомянутая скорость определяется путем применения уравнения:
ƒ ускорение имущественного объектатранслированное фильтрованное значение ускорения по оси х.
40. Система по п. 39, дополнительно выполненная с возможностью:
определения оси инициирования по условию, в котором скорость имущественного объекта превышает указанное значение во время, когда инициирующее событие было сохранено, причем ось инициирования является осью х, когда длительность таймера превышает длительность ускорения по оси х, ось инициирования является осью у, когда длительность таймера превышает длительность ускорения по оси у, и ось инициирования является осью z, когда длительность таймера превышает длительность ускорения по оси z;
регистрации предупреждения о потенциальной неисправности колеи, когда ось инициирования является осью z; и
регистрации предупреждения о неправильных действиях оператора, когда ось инициирования является по меньшей мере одной из оси х и оси у.
41. Система по п. 40, дополнительно выполненная с возможностью:
отправки предупреждений, указывающих любое из неблагоприятных условий эксплуатации, плохих колей и стрелок, бурных морей, плохих дорог, восстановленных маршрутов, местоположения, определенного с помощью GPS, видеозаписей, и доступа к информации устройства записи данных события.
42. Система по п. 39, в которой инициирующее событие содержит особенности по по меньшей мере одной из оси х, оси у и оси z, длительности таймера и времени, в которое инициирующее событие было сохранено.
43. Система по п. 39, в которой по меньшей мере одно периодическое сообщение данных содержит состояние в реальном времени по меньшей мере одного входного датчика на подвижном имущественном объекте.
44. Система по п. 31, дополнительно выполненная с возможностью:
установки длительности активности по оси х, длительности активности по оси у и длительности активности по оси z;
сохранения длительности активности по оси х, длительности активности по оси у и длительности активности по оси z;
установки порога активности по оси х, порога активности по оси у и порога активности по оси z;
сохранения порога активности по оси х, порога активности по оси у и порога активности по оси z;
определения фильтрованного порогового значения по оси х на основании суммирования транслированного фильтрованного значения ускорения по оси х и порога активности по оси х;
определения фильтрованного порогового значения по оси у на основании суммирования транслированного фильтрованного значения ускорения по оси у и порога активности по оси у;
определения фильтрованного порогового значения по оси z на основании суммирования транслированного фильтрованного значения ускорения по оси z и порога активности по оси z; и
непрерывного сравнения фильтрованного порогового значения по оси х с транслированным первичным значением ускорения по оси х, фильтрованного порогового значения по оси у с транслированным первичным значением ускорения по оси у и фильтрованного порогового значения по оси z с транслированным первичным значением ускорения по оси z.
45. Система по п. 44, дополнительно выполненная с возможностью:
активации таймера, когда происходит по меньшей мере одно из: транслированное первичное значение ускорения по оси х превышает фильтрованное пороговое значение по оси х, транслированное первичное значение ускорения по оси у превышает фильтрованное пороговое значение по оси у, и транслированное первичное значение ускорения по оси z превышает фильтрованное пороговое значение по оси z;
определения длительности таймера, когда происходит по меньшей мере одно из: транслированное первичное значение ускорения по оси х не превышает фильтрованное пороговое значение по оси х, транслированное первичное значение ускорения по оси у не превышает фильтрованное пороговое значение по оси у, и транслированное первичное значение ускорения по оси z не превышает фильтрованное пороговое значение по оси z, причем упомянутая длительность таймера содержит длительность, в которой по меньшей мере одно из: транслированное первичное значение ускорения по оси х превышало фильтрованное пороговое значение по оси х, транслированное первичное значение ускорения по оси у превышало фильтрованное пороговое значение по оси у, и транслированное первичное значение ускорения по оси z превышало фильтрованное пороговое значение по оси z;
сохранения одного из инициирующего события активности и инициирующего события неактивности во время, когда длительность таймера превышает по меньшей мере одно из длительности активности по оси х, длительности активности по оси у и длительности активности по оси z; и
обновления состояние работы двигателя.
46. Система по п. 45, в которой одно из инициирующего события активности и инициирующего события неактивности содержит сохранение особенностей по по меньшей мере одной из оси х, оси у и оси z, длительности таймера и времени, в которое одно из инициирующего события активности и инициирующего события неактивности было сохранено.
47. Система по п. 31, дополнительно выполненная с возможностью:
приема сигнала данных магнитометра от по меньшей мере одного 3-осного магнитометра, осуществляющего связь с микроконтроллером платы датчиков инерциальной навигации, причем упомянутый микроконтроллер обрабатывает сигнал данных магнитометра от упомянутого 3-осного магнитометра;
вычисления тангажа подвижного имущественного объекта, причем тангаж подвижного имущественного объекта определяется путем применения уравнения:

вычисления крена подвижного имущественного объекта, причем крен подвижного имущественного объекта определяется путем применения уравнения:

вычисления скорости подвижного имущественного объекта, причем скорость подвижного имущественного объекта определяется путем применения уравнения:
ƒ ускорение имущественного объектатранслированное фильтрованное значение ускорения по оси х;
идентификации гауссового значения по оси х, гауссового значения по оси у и гауссового значения по оси z на основании данных магнитометра; и
вычисления курса с компенсацией наклона на основании гауссового значения по оси х, гауссового значения по оси у и гауссового значения по оси z, тангажа подвижного имущественного объекта и крена подвижного имущественного объекта.
48. Система по п. 47, дополнительно выполненная с возможностью:
приема сигнала глобальной системы позиционирования (GPS) от по меньшей мере одного датчика GPS на борту подвижного имущественного объекта;
приема сигнала данных гироскопа от по меньшей мере одного 3-осного гироскопа, осуществляющего связь с микроконтроллером платы датчиков инерциальной навигации, причем упомянутый микроконтроллер обрабатывает сигнал данных гироскопа от упомянутого 3-осного гироскопа;
идентификации данных GPS, когда сигналы GPS доступны от датчика GPS;
разложения данных GPS на скорость, курс, широту и долготу;
сохранения упомянутых широты и долготы;
идентификации данных гироскопа на основании сигнала данных гироскопа от по меньшей мере одного 3-осного гироскопа;
вычисления новой позиции с использованием упомянутых широты, долготы, скорости подвижного имущественного объекта, по меньшей мере одного из скорости вращения колес и данных события от устройства записи данных события, курса с компенсацией наклона и данных гироскопа, причем новая позиция содержит новую широту и новую долготу; и
сохранения новой широты и новой долготы.
49. Система по п. 47, дополнительно выполненная с возможностью:
приема сигнала данных гироскопа от по меньшей мере одного 3-осного гироскопа, осуществляющего связь с микроконтроллером платы датчиков инерциальной навигации, причем упомянутый микроконтроллер обрабатывает сигнал данных гироскопа из упомянутого 3-осного гироскопа;
приема сигнала глобальной системы позиционирования (GPS) от по меньшей мере одного датчика GPS на борту подвижного имущественного объекта;
определения последней известной широты и последней известной долготы подвижного имущественного объекта из датчика GPS;
сохранения последней известной широты и последней известной долготы имущественного объекта;
считывания данных гироскопа из по меньшей мере одного 3-осного гироскопа;
вычисления новой позиции на основании последней известной широты, последней известной долготы, скорости подвижного имущественного объекта, по меньшей мере одного из скорости вращения колес и данных события от устройства записи данных события, курса с компенсацией наклона и данных гироскопа, причем новая позиция содержит новую широту и новую долготу; и
сохранения новой широты и новой долготы.
50. Система по п. 49, дополнительно выполненная с возможностью:
регистрации времени новой позиции из новой широты и новой долготы; и
отправки по меньшей мере одного из предупреждения об отправлении имущественного объекта и предупреждения о прибытии имущественного объекта.
51. Система по п. 50, дополнительно выполненная с возможностью:
задания по меньшей мере одной из по меньшей мере одной воображаемой разметки указания отправления и по меньшей мере одной воображаемой разметки указания прибытия, причем воображаемая разметка указания отправления содержит местоположение воображаемой разметки указания отправления, и воображаемая разметка указания прибытия содержит местоположение воображаемой разметки указания прибытия;
обнаружения регистрации времени разметки указания, когда новая позиция подвижного имущественного объекта является той же, что и одно из местоположения воображаемой разметки указания отправления и местоположения воображаемой разметки указания прибытия; и
отправки предупреждения, когда новая позиция подвижного имущественного объекта является той же, что и одно из местоположения воображаемой разметки указания отправления и местоположения воображаемой разметки указания прибытия.
52. Система по п. 31, дополнительно содержащая:
по меньшей мере один датчик уровня топлива, выполненный с возможностью измерения количества топлива внутри топливного бака подвижного имущественного объекта.
53. Система по п. 34, дополнительно выполненная с возможностью:
запроса файла регистрации данных, охватывающего по меньшей мере одно из времени инициирующего события и времени торможения, у устройства записи данных события;
приема файла регистрации данных; и
отправки файла регистрации данных в операционный отдел в реальном времени.
54. Система по п. 40, дополнительно выполненная с возможностью:
запроса загрузки цифрового видеосигнала, охватывающего время инициирующего события, от устройства записи цифрового видеосигнала;
приема загрузки цифрового видеосигнала; и
отправки загрузки цифрового видеосигнала в операционный отдел.
55. Система по п. 48, дополнительно выполненная с возможностью:
регистрации времени новой позиции из новой широты и новой долготы; и
отправки по меньшей мере одного из предупреждения об отправлении имущественного объекта и предупреждения о прибытии имущественного объекта.
56. Система по п. 55, дополнительно выполненная с возможностью:
задания по меньшей мере одной из по меньшей мере одной воображаемой разметки указания отправления и по меньшей мере одной воображаемой разметки указания прибытия, причем воображаемая разметка указания отправления содержит местоположение воображаемой разметки указания отправления, и воображаемая разметка указания прибытия содержит местоположение воображаемой разметки указания прибытия;
регистрации времени разметки указания, когда новая позиция подвижного имущественного объекта является той же, что и одно из местоположения воображаемой разметки указания отправления и местоположения воображаемой разметки указания прибытия; и
отправки предупреждения, когда новая позиция подвижного имущественного объекта является той же, что и одно из местоположения воображаемой разметки указания отправления и местоположения воображаемой разметки указания прибытия.
57. Способ записи, обработки и передачи данных от подвижного имущественного объекта, содержащий этапы, на которых:
по меньшей мере одним устройством записи данных события на борту подвижного имущественного объекта отслеживают состояние в реальном времени по меньшей мере одного входного датчика и регистрируют данные, относящиеся к подвижному имущественному объекту;
по меньшей мере одним устройством записи цифрового видеосигнала на борту подвижного имущественного объекта записывают неподвижные изображения, видео и акустические сигналы в реальном времени;
по меньшей мере одну плату датчиков инерциальной навигации устанавливают на борту подвижного имущественного объекта, причем упомянутая плата содержит микроконтроллер, осуществляющий связь с 3-осным акселерометром и обработку данных от него;
устанавливают длительность ускорения по оси х, длительность ускорения по оси у и длительность ускорения по оси z;
устанавливают порог ускорения по оси х, порог ускорения по оси у и порог ускорения по оси х;
считывают первичное значение ускорения по оси х, первичное значение ускорения по оси у и первичное значение ускорения по оси z из 3-осного акселерометра;
считывают гауссово значение по оси х, гауссово значение по оси у и гауссово значение по оси z из 3-осного магнитометра;
считывают значение углового ускорения по оси х, значение углового ускорения по оси у и значение углового ускорения по оси z из 3-осного гироскопа;
фильтруют первичное значение ускорения по оси х, первичное значение ускорения по оси у и первичное значение ускорения по оси z в фильтрованное значение ускорения по оси х, фильтрованное значение ускорения по оси у и фильтрованное значение ускорения по оси z;
транслируют оси платы датчиков инерциальной навигации в оси подвижного имущественного объекта посредством определения транслированного первичного значения ускорения по оси х на основании транслирования первичного значения ускорения по оси х в оси подвижного имущественного объекта, определения транслированного первичного значения ускорения по оси у на основании транслирования первичного значения ускорения по оси у в оси подвижного имущественного объекта и определения транслированного первичного значения ускорения по оси z на основании транслирования первичного значения ускорения по оси z в оси подвижного имущественного объекта; и
транслируют оси платы датчиков инерциальной навигации в оси подвижного имущественного объекта посредством определения транслированного фильтрованного значения ускорения по оси х на основании транслирования фильтрованного значения ускорения по оси х в оси подвижного имущественного объекта, определения транслированного фильтрованного значения ускорения по оси у на основании транслирования фильтрованного значения ускорения по оси у в оси подвижного имущественного объекта и определения транслированного фильтрованного значения ускорения по оси z на основании транслирования фильтрованного значения ускорения по оси z в оси подвижного имущественного объекта;
определяют фильтрованное пороговое значение по оси х на основании суммирования транслированного фильтрованного значения ускорения по оси х с порогом ускорения по оси х;
определяют фильтрованное пороговое значение по оси у на основании суммирования транслированного фильтрованного значения ускорения по оси у с порогом ускорения по оси у;
определяют фильтрованное пороговое значение по оси z на основании суммирования транслированного фильтрованного значения ускорения по оси z с порогом ускорения по оси z; и
непрерывно сравнивают фильтрованное пороговое значение по оси х с транслированным первичным значением ускорения по оси х, фильтрованное пороговое значение по оси у с транслированным первичным значением ускорения по оси у и фильтрованное пороговое значение по оси z с транслированным первичным значением ускорения по оси z.
| US 6373403 B1, 16.04.2002 | |||
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| US 4815323 A, 28.03.1989 | |||
| Колосоуборка | 1923 |
|
SU2009A1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| US 6701276 B2, 02.03.2004 | |||
| Колосоуборка | 1923 |
|
SU2009A1 |
| US 7451549 B1, 18.11.2008. | |||

