Перекрестная ссылка на родственную заявку
[0001] Данная заявка испрашивает приоритет предварительной заявки на патент (США) номер 63/110628, поданной 6 ноября 2020 года, и испрашивает приоритет непредварительной заявки на патент (США) номер 17518868, поданной 4 ноября 2021 года, в части, не противоречащей законодательству, содержимое которых полностью содержится в данном документе по ссылке. Эта заявка также испрашивает приоритет предварительной заявки на патент (США) номер 62/825943, поданной 29 марта 2019 года; предварительной заявки на патент (США) номер 62/829730, поданной 5 апреля 2019 года; непредварительной заявки на патент (США) номер 16/833590, поданной 28 марта 2020 года; предварительной заявки на патент (США) номер 62/337227, поданной 16 мая 2016 года; непредварительной заявки на патент (США) номер 15/595650, поданной 15 мая 2017 года, в настоящее время патента (США) номер 9934623, выданного 3 апреля 2018 года; непредварительной заявки на патент (США) номер 15/907486, поданной 28 февраля 2018 года, в настоящее время патента (США) номер 10445951, выданного 15 октября 2019 года; предварительной заявки на патент (США) номер 62/337225, поданной 16 мая 2016 года; непредварительной заявки на патент (США) номер 15/595689, поданной 15 мая 2017 года, в настоящее время патента (США) номер 10410441, выданного 10 сентября 2019 года; непредварительной заявки на патент (США) номер 16/385745, поданной 16 апреля 2019 года, в настоящее время патента (США) номер 11055935, выданного 6 июля 2021 года; предварительной заявки на патент (США) номер 62/337,228, поданной 16 мая 2016; непредварительной заявки на патент (США) номер 15/595712, поданной 15 мая 2017 года, в настоящее время патента (США) номер 10392038, выданного 27 августа 2019; предварительной заявки на патент (США) номер 62/680907, поданной 5 июня 2018 года; и непредварительной заявки на патент (США) номер 16/431466, поданной 4 июня 2019 года. Раскрытия каждого вышеуказанного документа полностью включаются в данный документ по ссылке. Все заявки на патент, патенты и печатные публикации, процитированные в данном документе, полностью включаются в данный документ по ссылке, за исключением любых определений, правовых оговорок или опровержений сущности изобретения и за исключением случаев, в которых включенный материал является несогласованным с прямо оговоренным раскрытием в данном документе, причем в этом случае преобладает терминология в этом раскрытии.
Область техники, к которой относится изобретение
[0002] Данное раскрытие относится к оборудованию, используемому на особо важных объектах и, в частности, к соединенной системе и способу диагностики, используемым на особо важных подвижных объектах.
Уровень техники
[0003] Особо важные подвижные объекты (активы, средства), такие как локомотивы, самолеты, различные виды общественного транспорта, горное оборудование, транспортабельное медицинское оборудование, груз, морские суда и военные суда, типично используют бортовые системы "черного ящика" для получения и записи данных и/или системы со "средством записи событий". Эти системы получения и записи данных, такие как средства записи данных событий или средства записи полетных данных, регистрируют множество системных параметров, используемых для расследования происшествий, оценки производительности работы бригады, анализа эффективности использования топлива, планирования техобслуживания и прогнозирующей диагностики. Типичная система получения и записи данных содержит цифровые и аналоговые вводы, а также переключатели давления и измерительные преобразователи давления, которые записывают данные из различных бортовых устройств датчиков. Записанные данные могут включать в себя такие параметры, как скорость, пройденное расстояние, местоположение, уровень топлива, число оборотов в минуту (RPM) двигателя, уровни жидкости, данные управления оператора, давления, текущие и спрогнозированные погодные условия и условия окружающей среды. В дополнение к базовым событиям и рабочим данным, возможности записи видео- и аудиособытий / данных также развертываются на многих из этих же подвижных объектов. Типично, данные извлекаются из средств записи данных, после того, как возникает происшествие, затрагивающее объект, и требуется расследование после того, как восстановлено средство записи данных. Могут возникать некоторые ситуации, в которых средство записи данных не может быть восстановлено, или данные являются недоступными по иным причинам. В этих ситуациях, данные, такие как данные событий и рабочие данные, видеоданные и аудиоданные, полученные посредством системы получения и записи данных, требуются быстро независимо от того, есть ли физический доступ к системе получения и записи данных или к этим данным.
Сущность изобретения
[0004] Данное раскрытие, в общем, относится к системам получения и записи данных в реальном времени и к соединенным системам диагностики, используемым на особо важных подвижных объектах. Идеи в данном документе могут предоставлять доступ в реальном времени или почти в реальном времени к данным, таким как данные событий и рабочие данные, видеоданные и аудиоданные, записываемые посредством системы получения и записи данных в реальном времени на особо важном подвижном объекте. Одна реализация способа для обработки, сохранения и передачи данных, по меньшей мере, из одного подвижного объекта включает в себя прием, с использованием бортового блока обработки, данных на основе по меньшей мере одного сигнала данных, по меньшей мере, из одного из следующего: по меньшей мере один источник данных на борту по меньшей мере одного подвижного объекта; и по меньшей мере один источник данных, удаленный, по меньшей мере, от одного подвижного объекта; декодирование данных в декодированные данные; добавление декодированных данных в сжатую структуру данных; отправку, с использованием по меньшей мере одного из канала проводной связи и канала беспроводной связи, сжатой структуры данных, по меньшей мере, в одно из следующего: бортовой дисплей на борту по меньшей мере одного объекта; и по меньшей мере одна, по меньшей мере, из одной бортовой системы на борту, по меньшей мере одного подвижного объекта и по меньшей мере одной бортовой подсистемы на борту по меньшей мере одного подвижного объекта; отправку, с использованием канала беспроводной связи, сжатой структуры данных в удаленную платформу, удаленную, по меньшей мере, от одного подвижного объекта.
[0005] Одна реализация способа для обработки, сохранения и передачи хронологических данных, по меньшей мере, из одного подвижного объекта включает в себя прием запроса на хронологические данные, по меньшей мере, от одного из пользователя на борту по меньшей мере одного подвижного объекта и пользователя не на борту по меньшей мере одного подвижного объекта; получение, с использованием бортового блока обработки на борту по меньшей мере одного подвижного объекта, хронологических данных; отправку, с использованием по меньшей мере одного из канала проводной связи и канала беспроводной связи, хронологических данных, по меньшей мере, в одно из следующего: бортовой дисплей на борту по меньшей мере одного объекта; и по меньшей мере одна, по меньшей мере, из одной бортовой системы на борту по меньшей мере одного подвижного объекта и по меньшей мере одной бортовой подсистемы на борту по меньшей мере одного подвижного объекта; и отображение, с использованием бортового дисплея, хронологических данных.
[0006] Одна реализация способа для обработки, на борту по меньшей мере одного подвижного объекта, запроса от удаленно расположенного пользователя включает в себя прием, с использованием бортового блока обработки на борту по меньшей мере одного подвижного объекта, запроса через канал беспроводной связи; идентификацию, с использованием бортового блока обработки, характера (сущности) запроса; установку, с использованием бортового блока обработки, программного обеспечения на бортовом дисплее на борту по меньшей мере одного подвижного объекта при условии, что характер запроса представляет собой удаленное обновление программного обеспечения бортового дисплея; установку, с использованием бортового блока обработки, программного обеспечения, по меньшей мере, на одной из по меньшей мере одной бортовой системы на борту по меньшей мере одного подвижного объекта и по меньшей мере одной бортовой подсистемы на борту по меньшей мере одного подвижного объекта при условии, что характер запроса представляет собой удаленное обновление программного обеспечения по меньшей мере одной из по меньшей мере одной бортовой системы на борту по меньшей мере одного подвижного объекта и по меньшей мере одной бортовой подсистемы на борту по меньшей мере одного подвижного объекта; и отправку, с использованием бортового блока обработки, запроса в по меньшей мере один из бортового дисплея, по меньшей мере одной бортовой системы на борту по меньшей мере одного подвижного объекта и по меньшей мере одной бортовой подсистемы на борту по меньшей мере одного подвижного объекта при условии, что характер запроса представляет собой команду.
[0007] Одна реализация способа для интегрирования данных, по меньшей мере, из одного источника, удаленного, по меньшей мере, от одного подвижного объекта, включает в себя сохранение данных в удаленное устройство хранения данных, удаленное, по меньшей мере, от одного подвижного объекта; отправку, с использованием канала беспроводной связи, данных в удаленную платформу, удаленную, по меньшей мере, от одного подвижного объекта; отправку, с использованием канала беспроводной связи, данных в бортовой блок обработки; и отправку, с использованием по меньшей мере одного из канала проводной связи и канала беспроводной связи, данных из бортового блока обработки, по меньшей мере, в одно из следующего: бортовой дисплей на борту по меньшей мере одного подвижного объекта; по меньшей мере одна из по меньшей мере одной бортовой системы на борту по меньшей мере одного подвижного объекта и по меньшей мере одной бортовой подсистемы на борту по меньшей мере одного подвижного объекта.
[0008] Одна реализация системы для обработки, сохранения и передачи данных из по меньшей мере одного подвижного объекта включает в себя бортовой блок обработки на борту по меньшей мере одного подвижного объекта, причем бортовой блок обработки выполнен с возможностью по меньшей мере одного из приема данных, с использованием по меньшей мере одного из канала проводной связи и канала беспроводной связи, на основе по меньшей мере одного сигнала данных из по меньшей мере одного из следующего: по меньшей мере, один источник данных на борту по меньшей мере одного подвижного объекта; и по меньшей мере один источник данных, удаленный от по меньшей мере одного подвижного объекта; облачный сервер реального времени, удаленный, по меньшей мере, от одного подвижного объекта, причем облачный сервер реального времени выполнен с возможностью принимать данные из бортового блока обработки с использованием канала беспроводной связи; дисплей на борту подвижного объекта, причем дисплей выполнен с возможностью отображать данные, принимаемые из бортового блока обработки, причем дисплей содержит одно из стороннего бортового дисплея и бортового дисплея системы; и удаленную платформу, удаленную, по меньшей мере, от подвижного объекта, причем удаленная платформа выполнена с возможностью отображать декодированные данные, принимаемые из облачного сервера реального времени.
[0009] Далее подробнее описываются вариации этих и других аспектов раскрытия.
Краткое описание чертежей
[0010] Описание в данном документе ссылается на прилагаемые чертежи, на которых аналогичные ссылки с номерами означают аналогичные части на нескольких видах, и при этом:
[0011] Фиг. 1 иллюстрирует полевую реализацию первого варианта осуществления примерной системы получения и записи данных в реальном времени в соответствии с реализациями этого раскрытия;
[0012] Фиг. 2 иллюстрирует полевую реализацию второго варианта осуществления примерной системы получения и записи данных в реальном времени в соответствии с реализациями этого раскрытия;
[0013] Фиг. 3 является блок-схемой последовательности операций процесса для записи данных и/или информации из подвижного объекта в соответствии с реализациями этого раскрытия;
[0014] Фиг. 4 является блок-схемой последовательности операций процесса для дополнения данных и/или информации из подвижного объекта после прекращения подачи мощности в соответствии с реализациями этого раскрытия;
[0015] Фиг. 5 является схемой, которая иллюстрирует примерные промежуточные блоки записей и полные блоки записей, сохраненные в аварийно-ударозащищенный запоминающий модуль в соответствии с реализациями этого раскрытия;
[0016] Фиг. 6 является схемой, которая иллюстрирует примерные промежуточные блоки записей в аварийно-ударозащищенном запоминающем модуле до прекращения подачи мощности и после восстановления подачи мощности в соответствии с реализациями этого раскрытия;
[0017] Фиг. 7 является схемой, которая иллюстрирует примерный сегмент записей в аварийно-ударозащищенном запоминающем модуле после того, как подача мощности восстановлена в соответствии с реализациями этого раскрытия;
[0018] Фиг. 8 иллюстрирует полевую реализацию первого варианта осуществления средства просмотра системы получения и записи данных в реальном времени в соответствии с реализациями этого раскрытия;
[0019] Фиг. 9 является блок-схемой последовательности операций процесса для записи видеоданных, аудиоданных и/или информации из подвижного объекта в соответствии с реализациями этого раскрытия;
[0020] Фиг. 10 является блок-схемой последовательности операций процесса для записи видеоданных, аудиоданных и/или информации из подвижного объекта в соответствии с реализациями этого раскрытия;
[0021] Фиг. 11 является блок-схемой последовательности операций, которая иллюстрирует примерный вид типа "рыбий глаз" камеры с обзором в 360 градусов средства просмотра системы получения и записи данных в реальном времени в соответствии с реализациями этого раскрытия;
[0022] Фиг. 12 является схемой, которая иллюстрирует примерный панорамный вид камеры с обзором в 360 градусов средства просмотра системы получения и записи данных в реальном времени в соответствии с реализациями этого раскрытия;
[0023] Фиг. 13 является схемой, которая иллюстрирует примерный квадратический вид камеры с обзором в 360 градусов средства просмотра системы получения и записи данных в реальном времени в соответствии с реализациями этого раскрытия;
[0024] Фиг. 14 является схемой, которая иллюстрирует примерный вид без искажений камеры с обзором в 360 градусов средства просмотра системы получения и записи данных в реальном времени в соответствии с реализациями этого раскрытия;
[0025] Фиг. 15 иллюстрирует полевую реализацию первого варианта осуществления системы анализа видеоконтента системы получения и записи данных в соответствии с реализациями этого раскрытия;
[0026] Фиг. 16А является схемой, которая иллюстрирует примерное обнаружение пути в соответствии с реализациями этого раскрытия;
[0027] Фиг. 16В является схемой, которая иллюстрирует примерное обнаружение пути и обнаружение стрелок в соответствии с реализациями этого раскрытия;
[0028] Фиг. 16С является схемой, которая иллюстрирует примерное обнаружение пути, подсчет числа путей и обнаружение сигналов в соответствии с реализациями этого раскрытия;
[0029] Фиг. 16D является схемой, которая иллюстрирует примерное обнаружение переездов и пути в соответствии с реализациями этого раскрытия;
[0030] Фиг. 16Е является схемой, которая иллюстрирует примерное обнаружение двойных воздушных сигналов в соответствии с реализациями этого раскрытия;
[0031] Фиг. 16F является схемой, которая иллюстрирует примерное обнаружение нескольких путей в соответствии с реализациями этого раскрытия;
[0032] Фиг. 16G является схемой, которая иллюстрирует примерное обнаружение стрелок и путей в соответствии с реализациями этого раскрытия;
[0033] Фиг. 16Н является схемой, которая иллюстрирует примерное обнаружение стрелок в соответствии с реализациями этого раскрытия;
[0034] Фиг. 17 является блок-схемой последовательности операций процесса для определения внутреннего состояния подвижного объекта в соответствии с реализациями этого раскрытия;
[0035] Фиг. 18 является блок-схемой последовательности операций процесса для определения обнаружения субъектов и обнаружения преград, возникающих внешне по отношению к подвижному объекту, в соответствии с реализациями этого раскрытия;
[0036] Фиг. 19 является блок-схемой последовательности операций процесса для совместного использования данных и/или информации из подвижного объекта через веб-браузер или устройство виртуальной реальности в соответствии с реализациями этого раскрытия;
[0037] Фиг. 20 иллюстрирует полевую реализацию седьмого варианта осуществления примерной системы получения и записи данных в реальном времени в соответствии с реализациями этого раскрытия;
[0038] Фиг. 21 является схемой, которая иллюстрирует примерное обнаружение сигналов системы автоматизированного мониторинга соответствия сигналов требованиям и выдачи аварийных оповещений в соответствии с реализациями этого раскрытия;
[0039] Фиг. 22 является блок-схемой последовательности операций способа для первого варианта осуществления процесса для определения соответствия требованиям сигналов в соответствии с реализациями этого раскрытия;
[0040] Фиг. 23А является схемой, показывающей компоновку объектов предшествующего уровня техники, показывающей то, как компоненты соединяются через шину транспортного средства;
[0041] Фиг. 23В является схемой, показывающей систему мониторинга и диагностики (MDS) предшествующего уровня техники, установленную на объекте;
[0042] Фиг. 23С является схемой дисплея машиниста железнодорожного состава (TOD) предшествующего уровня техники, установленного в объекте;
[0043] Фиг. 23D является схемой, показывающей ретрансляцию информации между подвижными объектами и центром управления предшествующего уровня техники;
[0044] Фиг. 24 является схемой первого варианта осуществления соединенной системы диагностики, показывающей ретрансляцию информации между подвижными объектами, центром управления и удаленными пользователями, в соответствии с реализациями этого раскрытия;
[0045] Фиг. 25А является схемой первого варианта осуществления соединенной системы диагностики, показывающей конфигурацию множества устройств на подвижном объекте, в соответствии с реализациями этого раскрытия;
[0046] Фиг. 25В является схемой первого варианта осуществления соединенной системы диагностики, показывающей конфигурацию множества устройств на объекте, показывающей экземпляр бортового дисплея и экземпляр удаленного вида бортового дисплея, в соответствии с реализациями этого раскрытия;
[0047] Фиг. 26А является схемой первого варианта осуществления соединенной системы диагностики, показывающей множество объектов, соединенных в состав, в соответствии с реализациями этого раскрытия;
[0048] Фиг. 26В является схемой первого варианта осуществления соединенной системы диагностики, показывающей множество объектов, соединенных в состав, и экземпляр бортового дисплея и/или человеко-машинного интерфейса (HMI) одного из объектов, в соответствии с реализациями этого раскрытия;
[0049] Фиг. 27А является видом в перспективе экземпляра бортового дисплея и/или человеко-машинного интерфейса (HMI) первого варианта осуществления соединенной системы диагностики в соответствии с реализациями этого раскрытия;
[0050] Фиг. 27В является видом в перспективе экземпляра бортового дисплея и/или человеко-машинного интерфейса (HMI) первого варианта осуществления соединенной системы диагностики в соответствии с реализациями этого раскрытия;
[0051] Фиг. 27С является видом в перспективе экземпляра удаленного вида бортового дисплея и/или человеко-машинного интерфейса (HMI) первого варианта осуществления соединенной системы диагностики в соответствии с реализациями этого раскрытия;
[0052] Фиг. 28А является схемой первой проиллюстрированной примерной реализации компоновки объектов, включающей в себя первый вариант осуществления соединенной системы диагностики, показывающей то, как компоненты соединяются через бортовые каналы связи объектов и внебортовые каналы связи, в соответствии с реализациями этого раскрытия;
[0053] Фиг. 28В является схемой второй проиллюстрированной примерной реализации компоновки объектов, включающей в себя первый вариант осуществления соединенной системы диагностики и камеры контактной сети, показывающей то, как компоненты соединяются через бортовые каналы связи объектов и внебортовые каналы связи, в соответствии с реализациями этого раскрытия;
[0054] Фиг. 28С является схемой третьей проиллюстрированной примерной реализации компоновки объектов, включающей в себя первый вариант осуществления соединенной системы диагностики без камеры контактной сети, показывающей то, как компоненты соединяются через бортовые каналы связи объектов и внебортовые каналы связи, в соответствии с реализациями этого раскрытия;
[0055] Фиг. 28D является схемой экземпляра удаленного вида бортового дисплея и/или человеко-машинного интерфейса (HMI) первого варианта осуществления соединенной системы диагностики в соответствии с реализациями этого раскрытия;
[0056] Фиг. 29 является схемой существующей последовательности действий для операций транспортного средства предшествующего уровня техники;
[0057] Фиг. 30 является схемой последовательности действий для операций транспортного средства первого варианта осуществления соединенной системы диагностики в соответствии с реализациями этого раскрытия;
[0058] Фиг. 31А является схемой экземпляра дисплея экрана операций объекта по фиг. 28А на бортовом дисплее и/или в человеко-машинном интерфейсе (HMI), показывающей передаваемые вживую сигналы, первого варианта осуществления соединенной системы диагностики в соответствии с реализациями этого раскрытия;
[0059] Фиг. 31В является схемой экземпляра дисплея экрана загрузок журнала отказов объекта по фиг. 28А на удаленной платформе первого варианта осуществления соединенной системы диагностики в соответствии с реализациями этого раскрытия;
[0060] Фиг. 32А является схемой экземпляра рабочего дисплея экрана объекта по фиг. 28А, включающей в себя первый вариант осуществления соединенной системы диагностики, который может отображаться на бортовом дисплее и/или в человеко-машинном интерфейсе (HMI) и/или в удаленном виде бортового дисплея и/или HMI на удаленной веб-платформе, в соответствии с реализациями этого раскрытия;
[0061] Фиг. 32В является схемой экземпляра дисплея экрана неисправностей объекта по фиг. 28А, включающей в себя первый вариант осуществления соединенной системы диагностики, который может отображаться на бортовом дисплее и/или в человеко-машинном интерфейсе (HMI) и/или в удаленном виде бортового дисплея и/или HMI на удаленной веб-платформе, в соответствии с реализациями этого раскрытия;
[0062] Фиг. 32С является схемой экземпляра дисплея экрана неисправностей объекта, по фиг. 28А, включающей в себя первый вариант осуществления соединенной системы диагностики, который может отображаться на бортовом дисплее и/или в человеко-машинном интерфейсе (HMI) и/или в удаленном виде бортового дисплея и/или HMI на удаленной веб-платформе, в соответствии с реализациями этого раскрытия;
[0063] Фиг. 32D является схемой экземпляра дисплея экрана техобслуживания объекта по фиг. 28В, включающей в себя первый вариант осуществления соединенной системы диагностики, показывающей экран доступа, который может отображаться на бортовом дисплее и/или в человеко-машинном интерфейсе (HMI) и/или в удаленном виде бортового дисплея и/или HMI на удаленной веб-платформе, в соответствии с реализациями этого раскрытия;
[0064] Фиг. 32Е является схемой экземпляра дисплея экрана техобслуживания объекта, по фиг. 28А, включающей в себя первый вариант осуществления соединенной системы диагностики, показывающей экран состояния системы, который может отображаться на бортовом дисплее и/или в человеко-машинном интерфейсе (HMI) и/или в удаленном виде бортового дисплея и/или HMI на удаленной веб-платформе, в соответствии с реализациями этого раскрытия;
[0065] Фиг. 32F является схемой экземпляра дисплея экрана техобслуживания объекта, по фиг. 28А, включающей в себя первый вариант осуществления соединенной системы диагностики, показывающей экран состояния подсистемы, который может отображаться на бортовом дисплее и/или в человеко-машинном интерфейсе (HMI) и/или в удаленном виде бортового дисплея и/или HMI на удаленной веб-платформе, в соответствии с реализациями этого раскрытия;
[0066] Фиг. 32G является схемой экземпляра дисплея экрана техобслуживания объекта, по фиг. 28А, включающей в себя первый вариант осуществления соединенной системы диагностики, показывающей данные по запросу из передаваемых вживую сигналов, которые могут отображаться на бортовом дисплее и/или в человеко-машинном интерфейсе (HMI) и/или в удаленном виде бортового дисплея и/или HMI на удаленной веб-платформе, в соответствии с реализациями этого раскрытия;
[0067] Фиг. 32Н является схемой экземпляра дисплея экрана спидометра объекта по фиг. 28В, включающей в себя первый вариант осуществления соединенной системы диагностики, который может отображаться на бортовом дисплее и/или в человеко-машинном интерфейсе (HMI) и/или в удаленном виде бортового дисплея и/или HMI на удаленной веб-платформе, в соответствии с реализациями этого раскрытия;
[0068] Фиг. 32I является схемой экземпляра дисплея экрана настроек четвертой проиллюстрированной примерной реализации объекта, включающей в себя первый вариант осуществления соединенной системы диагностики, который может отображаться на бортовом дисплее и/или в человеко-машинном интерфейсе (HMI) и/или в удаленном виде бортового дисплея и/или HMI на удаленной веб-платформе, в соответствии с реализациями этого раскрытия;
[0069] Фиг. 32J является схемой экземпляра дисплея экрана настроек четвертой проиллюстрированной примерной реализации объекта, включающей в себя первый вариант осуществления соединенной системы диагностики, показывающей радиокнопку переключения яркости, который может отображаться на бортовом дисплее и/или в человеко-машинном интерфейсе (HMI) и/или в удаленном виде бортового дисплея и/или HMI на удаленной веб-платформе, в соответствии с реализациями этого раскрытия;
[0070] Фиг. 32K является схемой экземпляра рабочего дисплея экрана четвертой проиллюстрированной примерной реализации объекта, включающей в себя первый вариант осуществления соединенной системы диагностики, который может отображаться на бортовом дисплее и/или в человеко-машинном интерфейсе (HMI) и/или в удаленном виде бортового дисплея и/или HMI на удаленной веб-платформе, в соответствии с реализациями этого раскрытия;
[0071] Фиг. 32L является схемой экземпляра рабочего дисплея экрана четвертой проиллюстрированной примерной реализации объекта, включающей в себя первый вариант осуществления соединенной системы диагностики, который может отображаться на бортовом дисплее и/или в человеко-машинном интерфейсе (HMI) и/или в удаленном виде бортового дисплея и/или HMI на удаленной веб-платформе, в соответствии с реализациями этого раскрытия;
[0072] Фиг. 32М является схемой экземпляра дисплея экрана операций объекта, по фиг. 28А, включающей в себя первый вариант осуществления соединенной системы диагностики, который может отображаться на бортовом дисплее и/или в человеко-машинном интерфейсе (HMI) и/или в удаленном виде бортового дисплея и/или HMI на удаленной веб-платформе, в соответствии с реализациями этого раскрытия;
[0073] Фиг. 32N является схемой экземпляра дисплея экрана загрузок объекта по фиг. 28А, включающей в себя первый вариант осуществления соединенной системы диагностики, показывающей передаваемые вживую данные, которые могут отображаться на бортовом дисплее и/или в человеко-машинном интерфейсе (HMI) и/или в удаленном виде бортового дисплея и/или HMI на удаленной веб-платформе, в соответствии с реализациями этого раскрытия;
[0074] Фиг. 33 является схемой существующих технологий в транспортных средствах предшествующего уровня техники;
[0075] Фиг. 34 является блок-схемой последовательности операций процесса для передачи данных в реальном времени между бортовыми системами и внебортовыми системами в соответствии с реализациями этого раскрытия;
[0076] Фиг. 35 является блок-схемой последовательности операций процесса для передачи хронологических данных между бортовыми системами и внебортовыми системами в соответствии с реализациями этого раскрытия;
[0077] Фиг. 36 является блок-схемой последовательности операций процесса для выполнения пользовательских запросов из удаленной платформы в бортовую систему в соответствии с реализациями этого раскрытия; и
[0078] Фиг. 37 является блок-схемой последовательности операций процесса для интегрирования данных со сторонними устройствами в соответствии с реализациями этого раскрытия.
Подробное описание изобретения
[0079] Первый вариант осуществления системы получения и записи данных в реальном времени, описанной в данном документе, предоставляет доступ в реальном времени или почти в реальном времени к широкому диапазону данных, таких как данные событий и рабочие данные, видеоданные и аудиоданные, связанные с особо важным объектом, удаленно расположенным пользователям, таким как владельцы объектов, машинисты и расследователи. Система получения и записи данных записывает данные, через средство записи данных, связанные с объектом, и передает в потоковом режиме данные в удаленный репозиторий данных и удаленно расположенным пользователям до, в ходе и после того, как возникает происшествие. Данные передаются в потоковом режиме в удаленный репозиторий данных в реальном времени или почти в реальном времени, обеспечивая доступность информации, по меньшей мере, вплоть до времени происшествия или аварийной ситуации, за счет этого фактически исключая необходимость находить и загружать "черный ящик", чтобы расследовать происшествие, затрагивающее объект, и исключая необходимость взаимодействовать со средством записи данных в объекте, чтобы запрашивать загрузку конкретных данных, находить и передавать файлы и использовать пользовательское приложение, чтобы просматривать данные. Система настоящего раскрытия сохраняет типичную возможность записи и добавляет способность передавать в потоковом режиме данные в удаленный репозиторий данных и удаленному конечному пользователю до, в ходе и после происшествия. В подавляющем большинстве ситуаций, информация, записываемая в средстве записи данных, является избыточной и не требуется, поскольку данные уже получаются и сохраняются в удаленном репозиторий данных.
[0080] До системы настоящего раскрытия, данные извлекались из "черного ящика" или "средства записи событий" после того, как возникало происшествие, и требовалось расследование. Файлы данных, содержащие временные сегменты, записываемые посредством "черного ящика", должны были загружаться и извлекаться из "черного ящика" и затем просматриваться пользователем с помощью собственного программного обеспечения. Пользователь должен был получать физический или удаленный доступ к объекту, выбирать требуемые данные, которые должны загружаться из "черного ящика", загружать файл, содержащий требуемую информацию, в вычислительное устройство, и размещать соответствующий файл с требуемыми данными с использованием пользовательского приложения, которое работает на вычислительном устройстве. Система настоящего раскрытия исключает необходимость для пользователя выполнять эти этапы, требуя от пользователя только использовать общий веб-браузер, чтобы осуществлять навигацию к требуемым данным. Удаленно расположенный пользователь может осуществлять доступ к общему веб-браузеру, чтобы осуществлять навигацию к требуемым данным, связанным с выбранным объектом или множеством объектов, чтобы просматривать и анализировать эффективность и безопасность работы объектов в реальном времени или почти в реальном времени.
[0081] Удаленно расположенный пользователь, такой как владелец объектов, машинист (оператор) и/или расследователь, может осуществлять доступ к общему веб-браузеру, чтобы осуществлять навигацию к живым и/или хронологическим требуемым данным, связанным с выбранным объектом, чтобы просматривать и анализировать эффективность эксплуатации и безопасность объектов в реальном времени или почти в реальном времени. Способность просматривать операции в реальном времени или почти в реальном времени обеспечивает быструю оценку и регулирование поведения. В ходе происшествия, например, информация и/или данные в реальном времени могут упрощать сортировку ситуации и предоставлять ценную информацию сотрудникам аварийных служб. В нормальном режиме работы, например, информация и/или данные почти в реальном времени могут использоваться, чтобы проводить аудит производительности работы бригады и способствовать общесетевой ситуативной осведомленности.
[0082] Данные могут включать в себя, но не только, аналоговые и частотные параметры, такие как скорость, давление, температура, ток, напряжение и ускорение, которые исходят от объекта и/или близлежащих объектов; булевы данные, такие как позиции стрелок, позиция актуатора, предупредительная световая сигнализация и команды управления актуатором; данные глобальной системы позиционирования (GPS) и/или данные географической информационной системы (GIS), такие как позиция, скорость и высота над уровнем моря; внутренне сформированную информацию, такую как нормативное ограничение скорости для объекта с учетом его текущей позиции, видеоинформацию и информацию изображений из камер, расположенных в различных местоположениях в, на или около объекта; аудиоинформацию из микрофонов, расположенных в различных местоположениях в, на или около объекта; информацию относительно оперативного плана для объекта, который отправляется объекту из центра данных, такую как информация маршрутов, расписаний и грузовых деклараций; информацию относительно окружающих условий, включающих в себя текущие и спрогнозированные погодные условия для области, в которой объект в данный момент работает или планируется для работы; данные состояния и рабочие данные управления объектами, сформированные посредством таких систем, как система точного управления движением железнодорожных составов (РТС) в локомотивах; и данные, извлекаемые из комбинации из любого вышеуказанного, включающие в себя, но не только, дополнительные данные, видео- и аудиоанализ и аналитику.
[0083] Фиг. 1 и 2 иллюстрируют полевую реализацию первого варианта осуществления и второго варианта осуществления, соответственно, примерной системы 100, 200 получения и записи данных (DARS) в реальном времени, в которой могут реализовываться аспекты раскрытия. DARS 100, 200 представляет собой систему, которая доставляет информацию в реальном времени удаленно расположенным конечным пользователям из устройства записи данных. DARS 100, 200 включает в себя средство 154, 254 записи данных, которое устанавливается на транспортном средстве или подвижном объекте 148, 248 и обменивается данными с любым числом различных источников информации через любую комбинацию бортовых проводных и/или беспроводных линий 170, 270 связи для передачи данных, таких как беспроводной шлюз / маршрутизатор, или внебортовых источников информации через центр 150, 250 данных DARS 100, 200 через линии связи для передачи данных, к примеру, через беспроводные линии 146 связи для передачи данных. Средство 154, 254 записи данных содержит бортовой диспетчер 120, 220 данных, кодер 122, 222 данных, детектор 156, 256 событий транспортного средства, репозиторий 158, 258 с постановкой в очередь и беспроводной шлюз / маршрутизатор 172, 272. Дополнительно, в этой реализации, средство 154, 254 записи данных может включать в себя аварийно-ударозащищенный запоминающий модуль 118, 218 и/или Ethernet-коммутатор 162, 262 с/без подачи мощности по Ethernet (РОЕ). Примерный защищенный запоминающий модуль 118, 218, например, может представлять собой аварийно-ударопрочный запоминающий модуль средства записи событий, который соответствует Своду федеральных нормативных актов и нормативным требованиям Федерального управления железных дорог, выживающий при аварии запоминающий блок, который соответствует Своду федеральных нормативных актов и/или нормативным требованиям Федерального управления гражданской авиации, аварийно-ударозащищенный запоминающий модуль в соответствии с любым действующим Сводом федеральных нормативных актов, либо любое другое подходящее защищенное запоминающее устройство, известное в данной области техники. Во втором варианте осуществления, показанном на фиг. 2, средство 254 записи данных дополнительно может включать в себя необязательное не-аварийно-ударозащищенное съемное устройство 219 хранения данных.
[0084] Проводные и/или беспроводные линии 170, 270 связи для передачи данных могут включать в себя любое одно либо комбинацию дискретных сигнальных вводов, стандартных или принадлежащих Ethernet, последовательных соединений и беспроводных соединений. Ethernet-соединенные устройства могут использовать Ethernet-коммутатор 162, 262 средства 154, 254 записи данных и могут использовать РОЕ. Ethernet-коммутатор 162, 262 может быть внутренним или внешним и может поддерживать РОЕ. Дополнительно, данные из удаленных источников данных, таких как картографический компонент 164, 264, компонент 124, 224 обработки деклараций по маршрутам / бригадам и погодный компонент 126, 226 в реализации фиг. 1 и 2, доступны для бортового диспетчера 120, 220 данных и детектора 156, 256 событий транспортного средства из центра 150, 250 данных через беспроводную линию 146, 246 связи для передачи данных и беспроводной шлюз / маршрутизатор 172, 272.
[0085] Средство 154, 254 записи данных собирает данные или информацию из широкого разнообразия источников, которые могут значительно варьироваться на основе конфигурации объекта, через бортовые линии 170, 270 связи для передачи данных. Кодер 122, 222 данных кодирует, по меньшей мере, минимальный набор данных, который типично задается посредством регулирующего органа. В этой реализации, кодер 122, 222 данных принимает данные из широкого разнообразия источников объектов 148, 248 и источников центров 150, 250 данных. Источники информации могут включать в себя любое число компонентов в объекте 148, 248, к примеру, любое из аналоговых вводов 102, 202, цифровых вводов 104, 204, модуля 106, 206 ввода-вывода, контроллера 108, 208 транспортного средства, контроллера 110, 210 двигателя, инерциальных датчиков 112, 212, глобальной системы 114, 214 позиционирования (GPS), камеры 116, 216, сигнальных данных 166, 266 системы точного управления движением железнодорожных составов, данных 168, 268 топливной системы, детекторов сотовой передачи (не показаны), внутренне управляемых данных и любых дополнительных сигналов данных, и любое число компонентов в центре 150, 250 данных, к примеру, любое из компонента 124, 224 обработки деклараций по маршрутам / бригадам, погодного компонента 126, 226, картографического компонента 164, 264 и любых дополнительных сигналов данных. Кодер 122, 222 данных сжимает или кодирует данные и синхронизирует во времени данные, чтобы упрощать эффективную передачу и репликацию в реальном времени в удаленный репозиторий 130, 230 данных. Кодер 122, 222 данных передает кодированные данные в бортовой диспетчер 120, 220 данных, который затем сохраняет кодированные данные в аварийно-ударозащищенном запоминающем модуле 118, 218 и репозиторий 158, 258 с постановкой в очередь для репликации в удаленный репозиторий 130, 230 данных через удаленный диспетчер 132, 232 данных, расположенный в центре 150, 250 данных. Необязательно, бортовой диспетчер 120, 220 данных может сохранять третичную копию кодированных данных в не-аварийно-ударозащищенном съемном устройстве 219 хранения данных по второму варианту осуществления, показанному на фиг. 2. Бортовой диспетчер 120, 220 данных и удаленный диспетчер 132, 232 данных работают согласованно, чтобы управлять процессом репликации данных. Один удаленный диспетчер 132, 232 данных в центре 150, 250 данных может управлять репликацией данных из множества объектов 148, 248.
[0086] Данные из различных компонентов ввода и данные из аудио-/графического пользовательского интерфейса 160, 260 (GUI) в кабине машиниста отправляются в детектор 156, 256 событий транспортного средства. Детектор 156, 256 событий транспортного средства обрабатывает данные, чтобы определять, возникает ли событие, происшествие или другая предварительно заданная ситуация, затрагивающая объект 148, 248. Когда детектор 156, 256 событий транспортного средства обнаруживает сигналы, которые указывают, что предварительно заданное событие возникает, детектор 156, 256 событий транспортного средства отправляет обработанные данные в отношении того, что предварительно заданное событие возникает, наряду с подтверждающими данными, сопровождающими предварительно заданное событие, в бортовой диспетчер 120, 220 данных. Детектор 156, 256 событий транспортного средства обнаруживает события на основе данных из широкого спектра источников, таких как аналоговые вводы 102, 202, цифровые вводы 104, 204, модуль 106, 206 ввода-вывода, контроллер 108, 208 транспортного средства, контроллер 110, 210 двигателя, инерциальные датчики 112, 212, GPS 114, 214, камеры 116, 216, компонент 124, 224 обработки деклараций по маршрутам / бригадам, погодный компонент 126, 226, картографический компонент 164, 264, сигнальные РТС-данные 166, 266 и данные 168, 268 топливной системы, которые могут варьироваться на основе конфигурации объекта. Когда детектор 156, 256 событий транспортного средства обнаруживает событие, обнаруженная информация событий объектов сохраняется в репозиторий 158, 258 с постановкой в очередь и необязательно может представляться бригаде объекта 148, 248 через аудио-/графический пользовательский интерфейс 160, 260 (GUI) в кабине машиниста.
[0087] Бортовой диспетчер 120, 220 данных также отправляет данные в репозиторий 158 с постановкой в очередь. В режиме почти реального времени, бортовой диспетчер 120, 220 данных сохраняет кодированные данные, принимаемые из кодера 122, 222 данных, и любую информацию событий в аварийно-ударозащищенном запоминающем модуле 118, 218 и в репозиторий 158, 258 с постановкой в очередь. Во втором варианте осуществления по фиг. 2, бортовой диспетчер 220 данных необязательно может сохранять кодированные данные в не-аварийно-ударозащищенном съемном устройстве 219 хранения данных. После того, как пять минут кодированных данных накоплены в репозиторий 158, 258 с постановкой в очередь, бортовой диспетчер 120, 220 данных сохраняет пять минут кодированных данных в удаленный репозиторий 130, 230 данных через удаленный диспетчер 132, 232 данных в центре 150, 250 данных по беспроводной линии 146, 256 связи для передачи данных, доступной через беспроводной шлюз / маршрутизатор 172, 272. В режиме реального времени, бортовой диспетчер 120, 220 данных сохраняет кодированные данные, принимаемые из кодера 122, 222 данных, и любую информацию событий в аварийно-ударозащищенный запоминающий модуль 118, 218 и необязательно в не-аварийно-ударозащищенное съемное устройство 219 хранения данных по фиг. 2 и в удаленный репозиторий 130, 230 данных через удаленный диспетчер 132, 232 данных в центре 150, 250 данных по беспроводной линии 146, 246 связи для передачи данных, доступной через беспроводной шлюз / маршрутизатор 172, 272. Бортовой диспетчер 120, 220 данных и удаленный диспетчер 132, 232 данных могут обмениваться данными по множеству линий беспроводной связи, к примеру, через Wi-Fi-, сотовые, спутниковые и частные беспроводные системы с использованием беспроводного шлюза / маршрутизатора 172, 272. Беспроводная линия 146, 246 связи для передачи данных, например, может представлять собой беспроводную локальную вычислительную сеть (WLAN), беспроводную общегородскую вычислительную сеть (WMAN), беспроводную глобальную вычислительную сеть (WWAN), частную беспроводную систему, сотовую телефонную сеть либо любое другое средство передачи данных из средства 154, 254 записи данных DARS 100, 200, в этом примере, в удаленный диспетчер 130, 230 данных из DARS 100, 200. Когда беспроводное соединение для передачи данных не доступно, данные сохраняются в запоминающем устройстве и ставятся в очередь в репозиторий 158, 258 с постановкой в очередь до тех пор, пока беспроводное подключение не восстанавливается, и процесс репликации данных не может возобновляться.
[0088] Параллельно с записью данных, средство 154, 254 записи данных непрерывно и автономно реплицирует данные в удаленный репозиторий 130, 230 данных. Процесс репликации имеет два режима, режим реального времени и режим почти реального времени. В режиме реального времени, данные реплицируются в удаленный репозиторий 130, 230 данных каждую секунду. В режиме почти реального времени, данные реплицируются в удаленный репозиторий 130, 230 данных каждые пять минут. Частоты, используемые для режима почти реального времени и режима реального времени, являются конфигурируемыми, и частота, используемая для режима реального времени, может регулироваться, чтобы поддерживать данные высокого разрешения посредством репликации данных в удаленный репозиторий 130, 230 данных каждые 0,10 секунды. Когда DARS 100, 200 находится в режиме почти реального времени, бортовой диспетчер 120, 220 данных ставит данные в очередь в репозиторий 158, 258 с постановкой в очередь до репликации данных в удаленный диспетчер 132, 232 данных. Бортовой диспетчер 120, 220 данных также реплицирует информацию детектора событий транспортного средства, поставленную в очередь в репозиторий 158, 258 с постановкой в очередь, в удаленный диспетчер 132, 232 данных. Режим почти реального времени используется в нормальном режиме работы, при большинстве условий, чтобы повышать эффективность процесса репликации данных.
[0089] Режим реального времени может инициироваться на основе событий, возникающих и обнаруживаемых посредством детектора 156, 256 событий транспортного средства на борту объекта 148, 248, либо посредством запроса, инициированного из центра 150, 250 данных. Типичный инициированный центром 150, 250 данных запрос на режим реального времени инициируется, когда удаленно расположенный пользователь 152, 252 запрашивает информацию в реальном времени из веб-клиента 142, 242. Типичная причина того, что режим реального времени берет начало на борту объекта 148, 248, заключается в обнаружении события или происшествия посредством детектора 156, 256 событий транспортного средства, такого как инициирование, машинистом, запроса на экстренную остановку, активность по экстренному торможению, быстрое ускорение или замедление по любой оси или потеря входной мощности в средство 154, 254 записи данных. При переходе из режима почти реального времени в режим реального времени, все данные, еще не реплицированные в удаленный репозиторий 130, 230 данных, реплицируются и сохраняются в удаленном репозиторий 130, 230 данных, и после этого репликация вживую инициируется. Переход между режимом почти реального времени и режимом реального времени типично возникает менее чем за пять секунд. После того, как предварительно определенное количество времени прошло с момента события или происшествия, после предварительно определенного количества времени неактивности, либо когда пользователю 152, 252 более не требуется информация в реальном времени из объекта 148, 248, средство 154, 254 записи данных возвращается в режим почти реального времени. Предварительно определенное количество времени, требуемое, чтобы инициировать переход, является конфигурируемым и типично задается равным десяти минутам.
[0090] Когда средство 154, 254 записи данных находится в режиме реального времени, бортовой диспетчер 120, 220 данных пытается непрерывно опустошать свою очередь в удаленный диспетчер 132, 232 данных, сохраняя данные в аварийно-ударозащищенный запоминающий модуль 118, 218 и необязательно в не-аварийно-ударозащищенное съемное устройство 219 хранения данных по фиг. 2 и отправляя данные в удаленный диспетчер 132, 232 данных одновременно. Бортовой диспетчер 120, 220 данных также отправляет обнаруженную информацию транспортного средства, поставленную в очередь в репозиторий 158, 258 с постановкой в очередь, в удаленный диспетчер 132, 232 данных.
[0091] При приеме данных, которые должны реплицироваться, из средства 154, 254 записи данных, наряду с данными из картографического компонента 164, 264, компонента 124, 224 обработки деклараций по маршрутам / бригадам и погодного компонента 126, 226, удаленный диспетчер 132, 232 данных сохраняет сжатые данные в удаленный репозиторий 130, 230 данных в центре 150, 250 данных DARS 100, 200. Удаленный репозиторий 130, 230 данных, например, может представлять собой облачное хранилище данных либо любое другое подходящее удаленное хранилище данных. Когда данные принимаются, инициируется процесс, который инструктирует декодеру 136, 236 данных декодировать последние реплицированные данные для/из удаленного репозитория 130, 230 данных и отправлять декодированные данные в удаленный детектор 134, 234 событий. Удаленный диспетчер 132, 232 данных сохраняет информацию событий транспортного средства в удаленном репозиторий 130, 230 данных. Когда удаленный детектор 134, 234 событий принимает декодированные данные, он обрабатывает декодированные данные, чтобы определять то, обнаружено или нет интересующее событие в декодированных данных. Декодированная информация затем используется посредством удаленного детектора 134, 234 событий, чтобы обнаруживать события, происшествия или другие предварительно заданные ситуации, в данных, возникающих с объектом 148, 248. При обнаружении интересующего события из декодированных данных, удаленный детектор 134, 234 событий сохраняет информацию событий и подтверждающие данные в удаленном репозиторий 130, 230 данных. Когда удаленный диспетчер 132, 232 данных принимает информацию удаленного детектора 134, 234 событий, удаленный диспетчер 132, 232 данных сохраняет информацию в удаленном репозиторий 130, 230 данных.
[0092] Удаленно расположенный пользователь 152, 252 может осуществлять доступ к информации, включающей в себя информацию детектора событий транспортного средства, связанную с конкретным объектом 148, 248 или с множеством объектов, с использованием стандартного веб-клиента 142, 242, такого как веб-браузер или устройство в стиле виртуальной реальности (не показано), которое, в этой реализации, может отображать миниатюрные изображения из выбранных камер. Веб-клиент 142, 242 передает запросы пользователя 152, 252 на предмет информации на вебсервер 140, 240 через сеть 144, 244 с использованием общих веб-стандартов, протоколов и технологий. Сеть 144, 244, например, может представлять собой Интернет. Сеть 144, 244 также может представлять собой локальную вычислительную сеть (LAN), общегородскую вычислительную сеть (MAN), глобальную вычислительную сеть (WAN), виртуальную частную сеть (VPN), сотовую телефонную сеть либо любое другое средство передачи данных из веб-сервера 140, 240, в этом примере, в веб-клиент 142, 242. Веб-сервер 140, 240 запрашивает требуемые данные из декодера 136, 236 данных. Декодер 136, 236 данных получает запрашиваемые данные, связанные с конкретным объектом 148, 248 или с множеством объектов, из удаленного репозитория 130, 230 данных при запросе из веб-сервера 140, 240. Декодер 136, 236 данных декодирует запрашиваемые данные и отправляет декодированные данные в локализатор 138, 238. Локализация представляет собой процесс преобразования данных в форматы, требуемые конечным пользователем, к примеру, преобразования данных в предпочтительный язык и единицы измерения пользователя. Локализатор 138, 238 идентифицирует настройки профиля, заданные пользователем 152, 252, посредством осуществления доступа к веб-клиенту 142, 242, и использует настройки профиля, чтобы подготавливать информацию, отправляемую в веб-клиент 142, 242 для представления пользователю 152, 252 на предпочтительном языке и единицах измерения пользователя, в качестве необработанных кодированных данных, и обнаруженная информация событий сохраняется в удаленный репозиторий 130, 230 данных с использованием всемирного координированного времени (UTC) и международной системы единиц (единиц СИ). Локализатор 138, 238 преобразует декодированные данные в формат, требуемый пользователем 152, 252, такой как предпочтительный язык и единицы измерения пользователя 152, 252. Локализатор 138, 238 отправляет локализованные данные в предпочтительном формате пользователя 152, 252 на веб-сервер 140, 240 по запросу. Вебсервер 140, 240 затем отправляет локализованные данные объекта или множества объектов в веб-клиент 142, 242 для просмотра и анализа, предоставляя воспроизведение и отображение в реальном времени стандартного видео и видео с обзором в 360 градусов. Веб-клиент 142, 242 может отображать, и пользователь 152, 252 может просматривать данные, видео и аудио для одного объекта или одновременно просматривать данные, видео и аудио для множества объектов. Веб-клиент 142, 242 также может предоставлять синхронное воспроизведение и отображение в реальном времени данных наряду с множеством видео- и аудиоданных и как стандартных видеоисточников, так и из видеоисточников с обзором в 360 градусов на, в или около объекта, близлежащих объектов и/или удаленно расположенных площадок.
[0093] Фиг. 3 является блок-схемой последовательности операций способа, показывающей процесс 300 для записи данных и/или информации из объекта 148, 248 в соответствии с реализацией этого раскрытия. Средство 154, 254 записи данных принимает сигналы данных из различных компонентов ввода, которые включают в себя физические или вычисленные элементы данных из объекта 148, 248 и центра 150, 250 данных, такие как скорость, координаты по широте, координаты по долготе, обнаружение гудка, позиция дроссельной заслонки, погодные данные, картографические данные и/или данные маршрута и/или бригады (302). Кодер 122, 222 данных создает запись, которая включает в себя структурированную последовательность битов, используемую, чтобы конфигурировать и записывать информацию сигналов данных (304). Кодированная запись затем отправляется в бортовой диспетчер 120, 220 данных, который последовательно комбинирует последовательность записей в хронологическом порядке в блоки записей, которые включают в себя вплоть до пяти минут данных (306). Промежуточный блок записей включает в себя менее пяти минут данных, в то время как полный блок записей включает в себя полные пять минут данных. Каждый блок записей включает все данные, требуемые, чтобы полностью декодировать включенные сигналы, в том числе и выполнять проверку целостности данных. Как минимум, блок записей должен начинаться с начальной записи и завершаться конечной записью.
[0094] Чтобы обеспечивать, что все кодированные сигнальные данные сохраняются в аварийно-ударозащищенный запоминающий модуль 118 и необязательно в не-аварийно-ударозащищенное съемное устройство 219 хранения данных по фиг. 2, если средство 154, 254 записи данных теряет мощность либо подвергается воздействию экстремальных температур или механических напряжений вследствие столкновения или другого катастрофического события, бортовой диспетчер 120, 220 данных сохраняет промежуточные блоки записей в аварийно-ударозащищенном запоминающем модуле 118 с предварительно определенной частотой (308) и необязательно в не-аварийно-ударозащищенном съемном устройстве 219 хранения данных по фиг. 2, причем предварительно определенная частота является конфигурируемой и/или переменной, как показано на фиг. 5 в примерном представлении. Промежуточные блоки записей сохраняются по меньшей мере один раз в секунду, но также могут сохраняться с частотой один раз каждую десятую часть секунды. Частота, с которой сохраняются промежуточные блоки записей, зависит от частот дискретизации каждого сигнала. Каждый промежуточный блок записей включает в себя полный набор записей с момента последнего полного блока записей. Средство 154, 254 записи данных может чередоваться между двумя временными местоположениями хранения в аварийно-ударозащищенном запоминающем модуле 118, 218 и необязательно в не-аварийно-ударозащищенном съемном устройстве 219 хранения данных по фиг. 2, при записи каждого промежуточного блока записей, чтобы предотвращать повреждение или потерю более одной секунды данных, когда средство 154, 254 записи данных теряет мощность при сохранении данных в аварийно-ударозащищенном запоминающем модуле 118, 218 и/или в необязательном не-аварийно-ударозащищенном съемном устройстве 219 хранения данных средства 254 записи данных по фиг. 2. Каждый раз, когда новый промежуточный блок записей сохраняется во временное местоположение аварийно-ударозащищенного запоминающего устройства, он должен перезаписывать существующий ранее сохраненный промежуточный блок записей в этом местоположении.
[0095] Каждые пять минут, в этой реализации, когда средство 154, 254 записи данных находится в режиме почти реального времени, бортовой диспетчер 120, 220 данных сохраняет полный блок записей, включающий в себя прошлые пять минут кодированных сигнальных данных, в сегмент записей в аварийно-ударозащищенном запоминающем модуле 118, 218, показанном на фиг. 7, и отправляет копию полного блока записей в удаленный диспетчер 132, 232 данных для хранения в удаленном репозиторий 130, 230 данных в течение предварительно определенного периода хранения, к примеру, двух лет (310). Аварийно-ударозащищенный запоминающий модуль 118, 218 и/или необязательное не-аварийно-ударозащищенное съемное устройство 219 хранения данных средства 254 записи данных по фиг. 2 сохраняют сегмент записей с последними блоками записей в течение предписанной продолжительности хранения, которая в этой реализации представляет собой установленную на федеральном уровне длительность, в течение которой средство 154, 254 записи данных должно сохранять рабочие данные или видеоданные в аварийно-ударозащищенном запоминающем модуле 118, 218 с дополнительным 24-часовым буфером, а затем перезаписывать.
[0096] Фиг. 4 является блок-схемой последовательности операций способа, показывающей процесс 400 для дополнения данных и/или информации из объекта 148, 248 после прекращения подачи мощности в соответствии с реализацией этого раскрытия. После того, как подача мощности восстанавливается, средство 154, 254 записи данных идентифицирует последний промежуточный блок записей, который сохранен в одном из двух временных местоположений аварийно-ударозащищенного запоминающего устройства (402), и проверяет достоверность последнего промежуточного блока записей с использованием 32-битового контроля циклическим избыточным кодом, который включается в конечную запись каждого блока записей (404). Прошедший проверку достоверности промежуточный блок записей затем добавляется в конец сегмента записей аварийно-ударозащищенного запоминающего устройства, и сегмент записей, который может содержать вплоть до пяти минут данных до потери мощности, отправляется в удаленный диспетчер 132, 232 данных для хранения в течение периода хранения (406). Кодированные сигнальные данные сохраняются в аварийно-ударозащищенный запоминающий модуль 118, 218 и/или в необязательное не-аварийно-ударозащищенное съемное устройство 219 хранения данных средства 254 записи данных по фиг. 2, в кольцевом буфере с предписанной продолжительностью хранения. Поскольку сегмент записей аварийно-ударозащищенного запоминающего устройства разбивается на несколько блоков записей, средство 154, 254 записи данных удаляет устаревшие блоки записей при необходимости высвобождать пространство запоминающего устройства каждый раз, когда полный блок записей сохраняется в аварийно-ударозащищенный запоминающий модуль 118, 218 и/или в необязательное не-аварийно-ударозащищенное съемное устройство 219 хранения данных средства 254 записи данных по фиг. 2.
[0097] Фиг. 6 является схемой, которая иллюстрирует примерные промежуточные блоки записей до потери мощности и после восстановления подачи мощности в средство 154, 254 записи данных. Когда промежуточный блок записей, сохраненный во временном местоположении 2 в (01.02.2016 10:10:08) (602), является достоверным, этот промежуточный блок записей добавляется в конец сегмента записей (702) (фиг. 7) в аварийно-ударозащищенном запоминающем модуле 118, 218 и/или в необязательном не-аварийно-ударозащищенном съемном устройстве 219 хранения данных средства 254 записи данных по фиг. 2, как показано на фиг. 7. Когда промежуточный блок записей, сохраненный во временном местоположении 2 в (01.02.2016 10:10:08), не является достоверным, промежуточный блок записей во временном местоположении 1 в (01.02.2016 10:10:07) проходит проверку достоверности, и если является достоверным, добавляется в конец сегмента записей в аварийно-ударозащищенном запоминающем модуле 118, 218 и/или в необязательном не-аварийно-ударозащищенном съемном устройстве 219 хранения данных средства 254 записи данных по фиг. 2.
[0098] Каждый раз, когда любой блок записей должен сохраняться в аварийно-ударозащищенном запоминающем модуле 118, 218 и/или в необязательном не-аварийно-ударозащищенном съемном устройстве 219 хранения данных средства 254 записи данных по фиг. 2, сегмент записей сразу сбрасывается на диск. Поскольку средство 154, 254 записи данных чередуется между двумя различными временными местоположениями хранения при сохранении промежуточных блоков записей, всегда имеется одно временное местоположение хранения, которое не модифицируется или сбрасывается в аварийно-ударозащищенное запоминающее устройство или не-аварийно-ударозащищенное съемное устройство хранения данных, за счет этого обеспечивая, что по меньшей мере один из двух промежуточных блоков записей, сохраненных во временных местоположениях хранения, является достоверным, и, что средство 154, 254 записи данных не должно терять более одной секунды для большей части данных каждый раз, когда средство 154, 254 записи данных теряет мощность. Аналогично, когда средство 154, 254 записи данных записывает данные в аварийно-ударозащищенный запоминающий модуль 118, 218 и/или в необязательное не-аварийно-ударозащищенное съемное устройство 219 хранения данных средства 254 записи данных по фиг. 2, каждую десятую часть секунды, средство 154, 254 записи данных не должно терять более одной десятой секунды для большей части данных каждый раз, когда средство 154, 254 записи данных теряет мощность.
[0099] Для простоты пояснения, процесс 300 и процесс 400 иллюстрируются и описываются в качестве последовательности этапов. Тем не менее, этапы в соответствии с этим раскрытием могут осуществляться в других порядках и/или параллельно. Дополнительно, этапы в соответствии с этим раскрытием могут осуществляться с другими этапами, не представленными и описанными в данном документе. Более того, не все проиллюстрированные этапы могут требоваться, чтобы реализовывать технологии в соответствии с заявленным предметом изобретения.
[00100] Третий вариант осуществления системы получения и записи данных в реальном времени и средства просмотра, описанных в данном документе, предоставляет доступ в реальном времени или почти в реальном времени к широкому диапазону данных, таких как данные событий и рабочие данные, видеоданные и аудиоданные особо важного объекта, удаленно расположенным пользователям, таким как владельцы объектов, машинисты и расследователи. Система получения и записи данных записывает данные, через средство записи данных, связанные с объектом, и передает в потоковом режиме данные в удаленный репозиторий данных и удаленно расположенным пользователям до, в ходе и после того, как возникает происшествие. Данные передаются в потоковом режиме в удаленный репозиторий данных в реальном времени или почти в реальном времени, обеспечивая доступность информации, по меньшей мере, вплоть до времени происшествия или аварийной ситуации, за счет этого фактически исключая необходимость находить и загружать "черный ящик", чтобы расследовать происшествие, затрагивающее объект, и исключая необходимость взаимодействовать со средством записи данных в объекте, чтобы запрашивать загрузку конкретных данных, находить и передавать файлы и использовать пользовательское приложение, чтобы просматривать данные. Система настоящего раскрытия сохраняет типичные возможности записи и добавляет способность передавать в потоковом режиме данные в удаленный репозиторий данных и удаленному конечному пользователю до, в ходе и после происшествия. В подавляющем большинстве ситуаций, информация, записываемая в средстве записи данных, является избыточной и не требуется, поскольку данные уже получаются и сохраняются в удаленном репозиторий данных.
[00101] До системы настоящего раскрытия, данные извлекаются из "черного ящика" или "средства записи событий" после того, как возникает происшествие, и требуется расследование. Файлы данных, содержащие временные сегменты, записываемые посредством "черного ящика", должны загружаться и извлекаться из "черного ящика" и затем просматриваться пользователем с помощью собственного программного обеспечения. Пользователь должен получать физический или удаленный доступ к объекту, выбирать требуемые данные, которые должны загружаться из "черного ящика", загружать файл, содержащий требуемую информацию, в вычислительное устройство, и находить соответствующий файл с требуемыми данными с использованием пользовательского приложения, которое работает на вычислительном устройстве. Система настоящего раскрытия исключает необходимость для пользователя выполнять эти этапы, требуя от пользователя только использовать общий веб-браузер, чтобы осуществлять навигацию к требуемым данным. Удаленно расположенный пользователь может осуществлять доступ к общему веб-браузеру, чтобы осуществлять навигацию к требуемым данным, связанным с выбранным объектом или множеством объектов, чтобы просматривать и анализировать эффективность и безопасность работы объектов в реальном времени или почти в реальном времени.
[00102] Удаленно расположенный пользователь, такой как владелец объектов, машинист и/или расследователь, может осуществлять доступ к общему веб-браузеру, чтобы осуществлять навигацию к живым и/или хронологическим требуемым данным, связанным с выбранным объектом, чтобы просматривать и анализировать эффективность эксплуатации и безопасность объектов в реальном времени или почти в реальном времени. Способность просматривать операции в реальном времени или почти в реальном времени обеспечивает быструю оценку и регулирование поведения. В ходе происшествия, например, информация и/или данные в реальном времени могут упрощать сортировку ситуации и предоставлять ценную информацию сотрудникам аварийных служб. В нормальном режиме работы, например, информация и/или данные почти в реальном времени могут использоваться, чтобы проводить аудит производительности работы бригады и способствовать общесетевой ситуативной осведомленности.
[00103] Система получения и записи данных в реальном времени по третьему варианту осуществления использует по меньшей мере одно из или любую комбинацию устройства измерения изображений, устройства измерения видео и устройства измерения дальности в, на или около подвижного объекта в качестве части системы получения и записи данных. Устройства измерения изображений и/или устройства измерения видео включают в себя, но не только, камеры с обзором в 360 градусов, стационарные камеры, узкоугольные камеры, широкоугольные камеры, камеры типа "рыбий глаз" с обзором в 360 градусов и/или другие камеры. Устройства измерения дальности включают в себя, но не только, радар и устройство на основе оптического обнаружения и дальнометрии (лидар). Лидар представляет собой способ наблюдения, который измеряет расстояние до цели посредством освещения цели с помощью импульсного лазерного света и измерения отраженных импульсов с помощью датчика. До системы настоящего раскрытия, "черный ящик" и/или "средства записи событий" не включают в себя камеры с обзором в 360 градусов или другие камеры в, на или около подвижного объекта. Система настоящего раскрытия добавляет способность использовать и записывать видео с использованием камер с обзором в 360 градусов, стационарных камер, узкоугольных камер, широкоугольных камер, камер типа "рыбий глаз" с обзором в 360 градусов, радара, лидара и/или других камер в качестве части системы получения и записи данных, предоставляя виды с обзором в 360 градусов, виды с узким углом обзора, виды с широким углом обзора, виды типа "рыбий глаз" и/или другие виды в, на или около подвижного объекта в удаленный репозиторий данных, удаленным пользователям и расследователю до, в ходе и после того, как возникает происшествие, затрагивающее подвижный объект. Способность просматривать операции, видео с обзором в 360 градусов и/или другие видео в реальном времени или почти в реальном времени обеспечивает быструю оценку и регулирование поведения бригады. Владельцы, машинисты и расследователи могут просматривать и анализировать эффективность эксплуатации, безопасность людей, транспортных средств и инфраструктур и могут расследовать или инспектировать происшествие. Способность просматривать видео с обзором в 360 градусов и/или другие видео из подвижного объекта обеспечивает быструю оценку и регулирование поведения бригады. В ходе происшествия, например, видео с обзором в 360 градусов и/или другие видео могут упрощать сортировку ситуации и предоставлять ценную информацию сотрудникам аварийных служб и расследователям. В нормальном режиме работы, например, видео с обзором в 360 градусов и/или другие видео могут использоваться, чтобы проводить аудит производительности работы бригады и способствовать общесетевой ситуативной осведомленности. Камеры с обзором в 360 градусов, стационарные камеры, узкоугольные камеры, широкоугольные камеры, камеры типа "рыбий глаз" с обзором в 360 градусов, радар, лидар и/или другие камеры предоставляют полную картину для ситуаций, чтобы предоставлять видео системы наблюдения для правоохранительных органов и/или железнодорожной полиции, инспекции критически важной инфраструктуры, мониторинга железнодорожных переездов, просмотра хода проведения путевых работ, аудита бригады внутри кабины машиниста и в депо и удаленного наблюдения в реальном времени.
[00104] Системы предшествующего уровня техники требуют от пользователей загружать видеофайлы, содержащие временные сегменты, чтобы просматривать видеофайлы с использованием собственного программного приложения или других внешних приложений воспроизведения видео. Система получения и записи данных настоящего раскрытия предоставляет видео с обзором в 360 градусов, другое видео, информацию изображений и аудиоинформацию и информацию измерения дальности, что может отображаться удаленному пользователю с помощью устройства в стиле виртуальной реальности и/или через стандартный веб-клиент, за счет этого исключая необходимость загружать и использовать внешние приложения, чтобы просматривать видео. Дополнительно, удаленно расположенные пользователи могут просматривать видео с обзором в 360 градусов и/или другие видео в различных режимах с помощью устройства в стиле виртуальной реальности или через стандартный веб-клиент, к примеру, через веб-браузер, за счет этого исключая необходимость загружать и использовать внешние приложения, чтобы просматривать видео. Предшествующие видеосистемы требуют от пользователя загружать видеофайлы, содержащие временные сегменты данных, которые являются просматриваемыми только с использованием собственного прикладного программного обеспечения или других внешних приложений воспроизведения видео, которые пользователь должен приобретать отдельно.
[00105] Данные могут включать в себя, но не только, видеоинформацию и информацию изображений из камер, расположенных в различных местоположениях в, на или около объекта, и аудиоинформацию из микрофонов, расположенных в различных местоположениях в, на или около объекта. Камера с обзором в 360 градусов представляет собой камеру, которая предоставляет сферическое поле обзора в 360 градусов, полусферическое поле обзора в 360 градусов и/или поле обзора типа "рыбий глаз" в 360 градусов. Использование камер с обзором в 360 градусов, стационарных камер, узкоугольных камер, широкоугольных камер, камер типа "рыбий глаз" с обзором в 360 градусов и/или других камер в, на или около объекта предоставляет возможность использовать и записывать видео с использованием камер с обзором в 360 градусов, стационарных камер, узкоугольных камер, широкоугольных камер, камер типа "рыбий глаз" с обзором в 360 градусов и/или других камер в качестве части DARS, за счет этого обеспечивая доступность вида с обзором в 360 градусов и/или других видов в, на или около объекта для удаленного репозитория данных, удаленно расположенных пользователей и расследователей до, в ходе и после происшествия.
[00106] Фиг. 8 иллюстрирует полевую реализацию третьего варианта осуществления примерной системы 800 получения и записи данных (DARS) в реальном времени, в которой могут реализовываться аспекты раскрытия. DARS 800 представляет собой систему, которая доставляет информацию в реальном времени, видеоинформацию и аудиоинформацию из средства 8 08 записи данных на подвижном объекте 830 удаленно расположенным конечным пользователям через центр 832 данных. Средство 808 записи данных устанавливается на транспортном средстве или подвижном объекте 830 и обменивается данными с любым числом различных источников информации через любую комбинацию проводных и/или беспроводных линий связи для передачи данных, к примеру, через беспроводной шлюз / маршрутизатор (не показан). Средство 808 записи данных содержит аварийно-ударозащищенный запоминающий модуль 810, бортовой диспетчер 812 данных и кодер 814 данных. В четвертом варианте осуществления, средство 808 записи данных также может включать в себя не-аварийно-ударозащищенное съемное устройство хранения данных (не показано). Примерный защищенный запоминающий модуль 810, например, может представлять собой аварийно-ударопрочный запоминающий модуль средства записи событий, который соответствует Своду федеральных нормативных актов и нормативным требованиям Федерального управления железных дорог, выживающий при аварии запоминающий блок, который соответствует Своду федеральных нормативных актов и/или нормативным требованиям Федерального управления гражданской авиации, аварийно-ударозащищенный запоминающий модуль в соответствии с любым действующим Сводом федеральных нормативных актов, либо любое другое подходящее защищенное запоминающее устройство, известное в данной области техники. Проводные и/или беспроводные линии связи для передачи данных могут включать в себя любое одно либо комбинацию дискретных сигнальных вводов, стандартных или собственных Ethernet-, последовательных соединений и беспроводных соединений.
[00107] Средство 808 записи данных собирает видеоданные, аудиоданные и другие данные и/или информацию из широкого спектра источников, которые могут варьироваться на основе конфигурации объекта, через бортовые линии связи для передачи данных. В этой реализации, средство 808 записи данных принимает данные из системы 804 видеоуправления, которая непрерывно записывает видеоданные и аудиоданные из камер с обзором в 360 градусов, стационарных камер, узкоугольных камер, широкоугольных камер, камер типа "рыбий глаз" с обзором в 360 градусов, радара, лидара и/или других камер 802 и стационарных камер 806, которые размещаются в, на или около объекта 830, и система 804 видеоуправления сохраняет видео- и аудиоданные в аварийно-ударозащищенный запоминающий модуль 810 и также может сохранять видео- и аудиоданные в не-аварийно-ударозащищенном съемном устройстве хранения данных по четвертому варианту осуществления. Различные версии видеоданных создаются с использованием различных скоростей передачи битов или пространственных разрешений, и эти версии разделяются на сегменты переменной длины, такие как миниатюры, пятиминутные сегменты низкого разрешения и пятиминутные сегменты высокого разрешения.
[00108] Кодер 814 данных кодирует, по меньшей мере, минимальный набор данных, который типично задается посредством регулирующего органа. Кодер 814 данных принимает видео- и аудиоданные из системы 804 видеоуправления и сжимает или кодирует данные и синхронизирует во времени данные, чтобы упрощать эффективную передачу и репликацию в реальном времени в удаленный репозиторий 820 данных. Кодер 814 данных передает кодированные данные в бортовой диспетчер 812 данных, который затем отправляет кодированные видео- и аудиоданные в удаленный репозиторий 820 данных через удаленный диспетчер 818 данных, расположенный в центре 830 данных в ответ на запрос по требованию удаленно расположенным пользователем 834 либо в ответ на определенные рабочие условия, наблюдаемые на борту объекта 830. Бортовой диспетчер 812 данных и удаленный диспетчер 818 данных работают согласованно, чтобы управлять процессом репликации данных. Удаленный диспетчер 818 данных в центре 832 данных может управлять репликацией данных из множества объектов. Видео- и аудиоданные, сохраненные в удаленном репозиторий 820 данных, доступны для веб-сервера 822 касательно осуществления доступа удаленно расположенным пользователем 834.
[00109] Бортовой диспетчер 812 данных также отправляет данные в репозиторий с постановкой в очередь (не показан). Бортовой диспетчер 812 данных отслеживает видео- и аудиоданные, сохраненные в аварийно-ударозащищенном запоминающем модуле 810 и/или в необязательном не-аварийно-ударозащищенном съемном устройстве хранения данных по четвертому варианту осуществления, посредством системы 804 видеоуправления, и определяет то, находится он в режиме почти реального времени или в режиме реального времени либо нет. В режиме почти реального времени, бортовой диспетчер 812 данных сохраняет кодированные данные, включающие в себя видеоданные, аудиоданные и любые другие данные или информацию, принимаемую из кодера 814 данных, и любую информацию событий, в аварийно-ударозащищенном запоминающем модуле 810 и/или в необязательном не-аварийно-ударозащищенном съемном устройстве хранения данных по четвертому варианту осуществления и в репозиторий с постановкой в очередь. После того, как пять минут кодированных данных накоплены в репозиторий с постановкой в очередь, бортовой диспетчер 812 данных сохраняет пять минут кодированных данных в удаленный репозиторий 820 данных через удаленный диспетчер 818 данных в центре 832 данных через беспроводную линию 816 связи для передачи данных. В режиме реального времени, бортовой диспетчер 812 данных сохраняет кодированные данные, включающие в себя видеоданные, аудиоданные и любые другие данные или информацию, принимаемую из кодера 814 данных, и любую информацию событий в удаленный репозиторий 820 данных через удаленный диспетчер 818 данных в центре 832 данных через беспроводную линию 816 связи для передачи данных каждый конфигурируемый предварительно определенный период времени, к примеру, каждую секунду или каждые 0,10 секунды. Бортовой диспетчер 812 данных и удаленный диспетчер 818 данных могут обмениваться данными по множеству линий беспроводной связи. Беспроводная линия 816 связи для передачи данных, например, может представлять собой беспроводную локальную вычислительную сеть (WLAN), беспроводную общегородскую вычислительную сеть (WMAN), беспроводную глобальную вычислительную сеть (WWAN), частную беспроводную систему, сотовую телефонную сеть либо любое другое средство передачи данных из средства 808 записи данных, в этом примере, в удаленный диспетчер 818 данных. Процесс отправки и извлечения видеоданных и аудиоданных удаленно из объекта 830 требует беспроводного соединения для передачи данных между объектом 830 и центром 832 данных. Когда беспроводное соединение для передачи данных не доступно, данные сохраняются и ставятся в очередь в аварийно-ударозащищенном запоминающем модуле 810 и/или в необязательном не-аварийно-ударозащищенном съемном устройстве хранения данных по четвертому варианту осуществления до тех пор, пока беспроводное подключение не восстанавливается. Процесс извлечения видеоданных, аудиоданных и любых других дополнительных данных возобновляется, как только беспроводное подключение восстанавливается.
[00110] Параллельно с записью данных, средство 808 записи данных непрерывно и автономно реплицирует данные в удаленный репозиторий 820 данных. Процесс репликации имеет два режима, режим реального времени и режим почти реального времени. В режиме реального времени, данные реплицируются в удаленный репозиторий данных 820 каждую секунду. В режиме почти реального времени, данные реплицируются в удаленный репозиторий 820 данных каждые пять минут. Частоты, используемые для режима почти реального времени и режима реального времени, являются конфигурируемыми, и частота, используемая для режима реального времени, может регулироваться, чтобы поддерживать данные высокого разрешения посредством репликации данных в удаленный репозиторий 820 данных каждые 0,10 секунды. Режим почти реального времени используется в нормальном режиме работы, при большинстве условий, чтобы повышать эффективность процесса репликации данных.
[00111] Режим реального времени может инициироваться на основе событий, возникающих на борту объекта 830, либо посредством запроса, инициированного из центра 832 данных. Типичный инициированный центром 832 данных запрос на режим реального времени инициируется, когда удаленно расположенный пользователь 834 запрашивает информацию в реальном времени из веб-клиента 826. Типичная причина того, что режим реального времени берет начало на борту объекта 830, заключается в обнаружении события или происшествия, такого как инициирование, машинистом, запроса на экстренную остановку, активность по экстренному торможению, быстрое ускорение или замедление по любой оси или потеря входной мощности в средство 808 записи данных. При переходе из режима почти реального времени в режим реального времени, все данные, еще не реплицированные в удаленный репозиторий 820 данных, реплицируются и сохраняются в удаленном репозиторий 820 данных, и после этого репликация вживую инициируется. Переход между режимом почти реального времени и режимом реального времени типично возникает менее чем за пять секунд. После того, как предварительно определенное количество времени прошло с момента события или происшествия, после предварительно определенного количества времени неактивности, либо когда пользователю 834 более не требуется информация в реальном времени из объекта 830, средство 808 записи данных возвращается в режим почти реального времени. Предварительно определенное количество времени, требуемое, чтобы инициировать переход, является конфигурируемым и типично задается равным десяти минутам.
[00112] Когда средство 808 записи данных находится в режиме реального времени, бортовой диспетчер 812 данных пытается непрерывно опустошать свою очередь в удаленный диспетчер 818 данных, сохраняя данные в аварийно-ударозащищенный запоминающий модуль 810 и в необязательное не-аварийно-ударозащищенное съемное устройство хранения данных по четвертому варианту осуществления и отправляя данные в удаленный диспетчер 818 данных одновременно.
[00113] При приеме видеоданных, аудиоданных и любых других данных или информации, которая должна реплицироваться, из средства 808 записи данных, удаленный диспетчер 818 данных сохраняет данные в удаленный репозиторий 820 данных в центре 830 данных. Удаленный репозиторий 820 данных, например, может представлять собой облачное хранилище данных либо любое другое подходящее удаленное хранилище данных. Когда данные принимаются, инициируется процесс, который инструктирует декодеру данных (не показан) декодировать последние реплицированные данные из удаленного репозитория 820 данных и отправлять декодированные данные в удаленный детектор событий (не показан). Удаленный диспетчер 818 данных сохраняет информацию событий транспортного средства в удаленном репозиторий 820 данных. Когда удаленный детектор событий принимает декодированные данные, он обрабатывает декодированные данные, чтобы определять то, обнаружено или нет интересующее событие в декодированных данных. Декодированная информация затем используется посредством удаленного детектора событий, чтобы обнаруживать события, происшествия или другие предварительно заданные ситуации в данных, возникающих с объектом 830. При обнаружении интересующего события из декодированных данных, ранее сохраненных в удаленном репозиторий 820 данных, удаленный детектор событий сохраняет информацию событий и подтверждающие данные в удаленном репозиторий 820 данных.
[00114] Видеоданные, аудиоданные и любые другие данные или информация доступны для пользователя 834 в ответ на запрос по требованию пользователем 834 и/или отправляются посредством бортового диспетчера 812 данных в удаленный репозиторий 820 данных в ответ на определенные рабочие условия, наблюдаемые на борту объекта 830. Видеоданные, аудиоданные и любые другие данные или информация, сохраненные в удаленном репозиторий 820 данных, доступны из веб-сервера 822 для осуществления доступа пользователем 834. Удаленно расположенный пользователь 834 может осуществлять доступ к видеоданным, аудиоданным и любым другим данным или информации, связанным с конкретным объектом 830 или с множеством объектов, сохраненным в удаленном репозиторий 820 данных, с использованием стандартного веб-клиента 826, такого как веб-браузер или устройство 828 в стиле виртуальной реальности, которое, в этой реализации, может отображать миниатюрные изображения выбранных камер. Веб-клиент 826 передает запрос пользователя 834 на предмет видео, аудио и/или другой информации на веб-сервер 822 через сеть 824 с использованием общих веб-стандартов, протоколов и технологий. Сеть 824, например, может представлять собой Интернет. Сеть 824 также может представлять собой локальную вычислительную сеть (LAN), общегородскую вычислительную сеть (MAN), глобальную вычислительную сеть (WAN), виртуальную частную сеть (VPN), сотовую телефонную сеть либо любое другое средство передачи данных из веб-сервера 822, в этом примере, в веб-клиент 826. Веб-сервер 822 запрашивает требуемые данные из удаленного репозитория 820 данных. Веб-сервер 822 затем отправляет запрашиваемые данные в веб-клиент 826, который предоставляет воспроизведение и отображение в реальном времени стандартного видео, видео с обзором в 360 градусов и/или другого видео. Веб-клиент 826 воспроизводит видеоданные, аудиоданные и любые другие данные или информацию для пользователя 834, который может взаимодействовать с видеоданными с обзором в 360 градусов и/или другими видеоданными, и/или данными неподвижных изображений для просмотра и анализа. Пользователь 834 также может загружать видеоданные, аудиоданные и любые другие данные или информацию с использованием веб-клиента 826 и затем может использовать устройство 828 в стиле виртуальной реальности, чтобы взаимодействовать с видеоданными с обзором в 360 градусов для просмотра и анализа.
[00115] Веб-клиент 826 может улучшаться за счет программного приложения, которое предоставляет воспроизведение видео с обзором в 360 градусов и/или другого видео во множестве различных режимов. Пользователь 834 может выбирать режим, в котором программное приложение представляет воспроизведение видео, такой как, например, вид типа "рыбий глаз", как показано на фиг. 11, панорамный вид, как показано на фиг. 12, двойной панорамный вид (не показан), квадратический вид, как показано на фиг. 13, и вид без искажений, как показано на фиг. 14.
[00116] Фиг. 9 является блок-схемой последовательности операций способа, показывающей процесс 840 для записи видеоданных, аудиоданных и/или информации из объекта 830 в соответствии с реализацией этого раскрытия. Система 804 видеоуправления принимает сигналы данных из различных компонентов ввода (842), таких как камеры с обзором в 360 градусов, стационарные камеры, узкоугольные камеры, широкоугольные камеры, камеры типа "рыбий глаз" с обзором в 360 градусов, радар, лидар и/или другие камеры 802 и стационарные камеры 806 на, в или около объекта 830. Система 804 видеоуправления затем сохраняет видеоданные, аудиоданные и/или информацию в аварийно-ударозащищенном запоминающем модуле 810 и/или в необязательном не-аварийно-ударозащищенном съемном устройстве хранения данных по четвертому варианту осуществления (844), с использованием любой комбинации стандартизированных форматов, таких как, например, неподвижные изображения, миниатюры, последовательности неподвижных изображений или сжатые видеоформаты. Кодер 814 данных создает запись, которая включает в себя структурированную последовательность битов, используемую , чтобы конфигурировать и записывать информацию сигналов данных (846). В режиме почти реального времени, система 804 видеоуправления сохраняет видеоданные в аварийно-ударозащищенный запоминающий модуль 810 и в необязательное не-аварийно-ударозащищенное съемное устройство хранения данных по четвертому варианту осуществления, при отправке только ограниченных видеоданных, таких как миниатюры или очень короткие видеосегменты низкого разрешения, во внебортовом направлении в удаленный репозиторий 820 данных (848).
[00117] В другой реализации, кодированная запись затем отправляется в бортовой диспетчер 812 данных, который последовательно комбинирует последовательность записей в хронологическом порядке в блоки записей, которые включают в себя вплоть до пяти минут данных. Промежуточный блок записей включает в себя менее пяти минут данных, в то время как полный блок записей включает в себя полные пять минут данных. Каждый блок записей включает в себя все данные, требуемые, чтобы полностью декодировать включенные сигналы, в том числе и выполнять проверку целостности данных. Как минимум, блок записей должен начинаться с начальной записи и завершаться конечной записью.
[00118] Чтобы обеспечивать, что все кодированные сигнальные данные сохраняются в аварийно-ударозащищенный запоминающий модуль 810 и/или в необязательное не-аварийно-ударозащищенное съемное устройство хранения данных по четвертому варианту осуществления, если средство 808 записи данных теряет мощность, бортовой диспетчер 812 данных сохраняет промежуточные блоки записей в аварийно-ударозащищенном запоминающем модуле 810 и/или в необязательном не-аварийно-ударозащищенном съемном устройстве хранения данных по четвертому варианту осуществления, с предварительно определенной частотой, причем предварительно определенная частота является конфигурируемой и/или переменной. Промежуточные блоки записей сохраняются по меньшей мере один раз в секунду, но также могут сохраняться с частотой один раз каждую десятую часть секунды. Частота, с которой сохраняются промежуточные блоки записей, зависит от частот дискретизации каждого сигнала. Каждый промежуточный блок записей включает в себя полный набор записей с момента последнего полного блока записей. Средство 808 записи данных может чередоваться между двумя временными местоположениями хранения в аварийно-ударозащищенном запоминающем модуле 810 при записи каждого промежуточного блока записей, чтобы предотвращать повреждение или потерю более чем одной секунды данных, когда средство 808 записи данных теряет мощность, при одновременном сохранении данных в аварийно-ударозащищенный запоминающий модуль 810 и/или в необязательное не-аварийно-ударозащищенное съемное устройство хранения данных по четвертому варианту осуществления. Каждый раз, когда новый промежуточный блок записей сохраняется во временное местоположение аварийно-ударозащищенного запоминающего устройства, то он должен перезаписывать существующий ранее сохраненный промежуточный блок записей в этом местоположении.
[00119] Каждые пять минут, в этой реализации, когда средство 808 записи данных находится в режиме почти реального времени, бортовой диспетчер 812 данных сохраняет полный блок записей, включающий в себя последние пять минут кодированных сигнальных данных, в сегмент записей в аварийно-ударозащищенном запоминающем модуле 810 и/или в необязательном не-аварийно-ударозащищенном съемном устройстве хранения данных по четвертому варианту осуществления, и отправляет копию полного блока записей, содержащего пять минут видеоданных, аудиоданных и/или информации, в удаленный диспетчер 818 данных для хранения в удаленном репозиторий 820 данных в течение предварительно определенного периода хранения, к примеру, двух лет. Аварийно-ударозащищенный запоминающий модуль 810 и/или необязательное не-аварийно-ударозащищенное съемное устройство хранения данных по четвертому варианту осуществления сохраняют сегмент записей с последними блоками записей в течение предписанной продолжительности хранения, которая в этой реализации представляет собой предписанную на федеральном уровне длительность, в течение которой средство 808 записи данных должно сохранять рабочие данные или видеоданные в аварийно-ударозащищенном запоминающем модуле 810 с дополнительным 24-часовым буфером, а затем перезаписывать.
[00120] Фиг. 10 является блок-схемой последовательности операций способа, показывающей процесс 850 для просмотра данных и/или информации из объекта 830 через веб-браузер 826 или устройство 828 в стиле виртуальной реальности. Когда событие возникает, либо, когда удаленно расположенный авторизованный пользователь 834 запрашивает сегмент видеоданных, сохраненных в аварийно-ударозащищенном запоминающем модуле 810, через веб-клиент 826, бортовой диспетчер 812 данных, в зависимости от события, должен начинать отправку видеоданных во внебортовом направлении в реальном времени с наилучшим доступным разрешением, с учетом полосы пропускания беспроводной линии 816 связи для передачи данных. Удаленно расположенный пользователь 834 инициирует запрос на конкретные видео- и/или аудиоданные в конкретном режиме просмотра (852) через веб-клиент 826, который передает запрос в веб-сервер 822 через сеть 824. Веб-сервер 822 запрашивает конкретные видео- и/или аудиоданные из удаленного репозитория 820 данных и отправляет запрашиваемые видео- и/или аудиоданные в веб-клиент 826 (854) через сеть 824. Веб-клиент 826 отображает видео- и/или аудиоданные в режиме просмотра, указываемом пользователем 834 (856). Пользователь 834 затем может загружать конкретные видео- и/или аудиоданные, чтобы просматривать на устройстве 828 в стиле виртуальной реальности. В другой реализации, в режиме реального времени, сначала отправляются миниатюры с односекундными интервалами, затем короткие сегменты видео более низкого разрешения и после этого короткие сегменты видео более высокого разрешения.
[00121] Для простоты пояснения, процесс 840 и процесс 850 иллюстрируются и описываются в качестве последовательности этапов. Тем не менее, этапы в соответствии с этим раскрытием могут осуществляться в других порядках и/или параллельно. Дополнительно, этапы в соответствии с этим раскрытием могут осуществляться с другими этапами, не представленными и описанными в данном документе. Более того, не все проиллюстрированные этапы могут требоваться, чтобы реализовывать технологии в соответствии с заявленным предметом изобретения.
[00122] Пятый вариант осуществления системы получения и записи данных в реальном времени и системы видеоаналитики, описанной в данном документе, предоставляет доступ в реальном времени или почти в реальном времени к широкому диапазону данных, таких как данные событий и рабочие данные, видеоданные и аудиоданные особо важного объекта, удаленно расположенным пользователям. Система получения и записи данных записывает данные, связанные с объектом, и передает в потоковом режиме данные в удаленный репозиторий данных и удаленно расположенным пользователям до, в ходе и после того, как возникает происшествие. Данные передаются в потоковом режиме в удаленный репозиторий данных в реальном времени или почти в реальном времени, обеспечивая доступность информации, по меньшей мере, вплоть до времени происшествия или аварийной ситуации, за счет этого фактически исключая необходимость находить и загружать "черный ящик", чтобы расследовать происшествие, затрагивающее объект, посредством потоковой передачи информации в удаленный репозиторий данных в реальном времени или почти в реальном времени, и обеспечивая доступность к информации, по меньшей мере, вплоть до времени катастрофического события. DARS выполняет видеоанализ записываемых видеоданных подвижного объекта, чтобы определять, например, занятость кабины машиниста, обнаружение пути и/или обнаружение субъектов около путей. Удаленно расположенный пользователь может использовать общий веб-браузер, чтобы осуществлять навигацию и просматривать требуемые данные, связанные с выбранным объектом или множеством объектов, и не должен обязательно взаимодействовать с системой получения и записи данных на объекте, чтобы запрашивать загрузку конкретных данных, находить или передавать файлы и использовать пользовательское приложение, чтобы просматривать данные.
[00123] DARS предоставляет доступ удаленно расположенным пользователям к видеоданным и видеоанализу, выполняемому посредством системы видеоаналитики, посредством передачи в потоковом режиме данных в удаленный репозиторий данных и удаленно расположенному пользователю до, в ходе и после происшествия, за счет этого исключая необходимость для пользователя вручную загружать, извлекать и воспроизводимое видео, чтобы анализировать видеоданные, чтобы определять занятость кабины машиниста, то, присутствует или нет член бригады или неавторизованный персонал в ходе происшествия, обнаружения пути, обнаружения субъектов около путей, расследования либо в какое-либо другое интересующее время. Дополнительно, система видеоаналитики предоставляет определение состояния занятости кабины машиниста, обнаружение пути, обнаружение субъектов около путей и определение головной и хвостовой части посредством обработки данных изображений и видеоданных в реальном времени, за счет этого обеспечивая, что корректные данные всегда доступны для пользователя. Например, обработка изображения в реальном времени обеспечивает, что локомотив, обозначенный в качестве хвостового локомотива, не эксплуатируется в качестве головного, чтобы повышать безопасность на железной дороге. Системы предшествующего уровня техники предоставляют позицию локомотива в железнодорожном составе посредством использования функциональности формирования железнодорожного состава в диспетчерских системах. Время от времени, информация диспетчерской системы может быть устаревшей, поскольку информация не обновляется в реальном времени, и персонал бригады может сменять локомотив, при необходимости.
[00124] До системы настоящего раскрытия, инспекционные бригады и/или персонал объекта должны вручную инспектировать состояние пути, вручную проверять то, находится транспортное средство в головной или хвостовой позиции, вручную инспектировать местоположения каждого интересующего отдельного субъекта, вручную создавать базу данных географических местоположений всех интересующих субъектов, периодически выполнять полевое наблюдение вручную каждого интересующего субъекта, чтобы верифицировать его местоположение, и идентифицировать все изменения географического местоположения, которые отличаются от исходного инспектирования, вручную обновлять базу данных, когда интересующие субъекты изменяют местоположение вследствие ремонта или дополнительного развития инфраструктуры со времени, когда исходная база данных создана, выбирать и загружать требуемые данные из средства записи цифрового видео и/или средства записи данных и инспектировать загружаемые данные и/или видео оффлайн и проверять пути на предмет любых преград, и машинист транспортного средства должен физически проверять любые преграды и/или смены позиции стрелки. Система настоящего раскрытия исключает необходимость для пользователей выполнять эти этапы, требуя от пользователя только использовать общий веб-браузер, чтобы осуществлять навигацию к требуемым данным. Владельцы объектов и машинисты могут автоматизировать и повышать эффективность и безопасность подвижных объектов в реальном времени и могут активно отслеживать состояние пути и получать предупредительную информацию в реальном времени. Система настоящего раскрытия также исключает необходимость для владельцев объектов и машинистов загружать данные из средства записи данных, чтобы отслеживать состояние пути и расследовать происшествия. В качестве активной (действующей) системы защиты, DARS может помогать машинисту проверять любые преграды, отправлять аварийные оповещения в реальном времени и/или сохранять информацию оффлайн и отправлять аварийную информацию для удаленного мониторинга и хранения. Как текущая, так и прошлая информация обнаружения пути и информация, связанная с обнаружением субъектов около путей, могут сохраняться в удаленном репозиторий данных в реальном времени, чтобы помогать пользователю при просмотре информации при необходимости. Удаленно расположенный пользователь может осуществлять доступ к общему веб-браузеру, чтобы осуществлять навигацию к требуемым данным, связанным с выбранным объектом или множеством объектов, чтобы просматривать и анализировать эффективность и безопасность работы объектов в реальном времени или почти в реальном времени.
[00125] Система получения и записи данных в реальном времени по пятому варианту осуществления может использоваться, чтобы непрерывно отслеживать интересующие субъекты и идентифицировать в реальном времени, когда они движутся или повреждаются, становятся загороженными в силу листвы и/или находятся в неисправном состоянии и требуют техобслуживания. DARS использует видеоинформацию, информацию изображений и/или аудиоинформацию, чтобы обнаруживать и идентифицировать различные инфраструктурные субъекты, такие как железнодорожные пути, в видео, имеет способность следовать по путям по мере продвижения подвижного объекта и имеет способность создавать, проводить аудит и периодически обновлять базу данных интересующих субъектов с географическим местоположением. Система получения и записи данных в реальном времени по пятому варианту осуществления использует по меньшей мере одно из или любую комбинацию устройства измерения изображений, устройства измерения видео и устройства измерения дальности в, на или около подвижного объекта в качестве части системы получения и записи данных. Устройства измерения изображений и/или устройства измерения видео включают в себя, но не только, камеры с обзором в 360 градусов, стационарные камеры, узкоугольные камеры, широкоугольные камеры, камеры типа "рыбий глаз" с обзором в 360 градусов и/или другие камеры. Устройства измерения дальности включают в себя, но не только, радар и устройство на основе оптического обнаружения и дальнометрии (лидар). Лидар представляет собой способ наблюдения, который измеряет расстояние до цели посредством освещения цели с помощью импульсного лазерного света и измерения отраженных импульсов с помощью датчика.
[00126] DARS может автоматически инспектировать состояние пути, к примеру, с подсчетом числа присутствующих путей, идентификацией текущей пути, по которой движется подвижный объект, и обнаружением всех присутствующих преград или дефектов, таких как размытый балласт, сломанные пути, не выдержанные по лекалу пути, неправильно совмещенные стрелки, наползания стрелок, затопление путей, накопления снега и т.д., и планировать профилактическое техобслуживание, с тем, чтобы исключать катастрофические события. DARS также может обнаруживать стрелки железнодорожных путей и отслеживать смены пути. DARS дополнительно может обнаруживать изменение местоположения данных, включающее в себя то, субъект отсутствует, загорожен и/или не присутствует в ожидаемом местоположении либо нет. Обнаружение пути, диагностическая информация инфраструктуры и/или информация мониторинга инфраструктуры могут отображаться пользователю с помощью любого стандартного веб-клиента, такого как веб-браузер, за счет этого исключая необходимость загружать файлы из средства записи данных и использовать собственное прикладное программное обеспечение или другие внешние приложения, чтобы просматривать информацию, как требуют системы предшествующего уровня техники. Этот процесс может расширяться таким образом, чтобы автоматически создавать, проводить аудит и/или обновлять базу данных с географическими местоположениями интересующих субъектов и обеспечивать соответствие Федеральным нормативным требованиям. За счет системы настоящего раскрытия, камеры, заранее установленные, чтобы соблюдать федеральные нормативные требования, используются, чтобы выполнять различные задачи, которые ранее требовали человеческого взаимодействия, специализированных транспортных средств и/или альтернативного оборудования. DARS обеспечивает возможность выполнения этих задач автоматически по мере того, как подвижный объект движется по территории, в качестве части нормальной коммерческой эксплуатации и выполнения ежедневных операций. DARS может использоваться, чтобы сохранять бесчисленные человеко-часы работы вручную посредством использования нормального режима работы транспортных средств и заранее установленных камер, чтобы выполнять задачи, которые ранее требовали усилий вручную. DARS также может выполнять задачи, которые ранее выполнялись с использованием специализированных транспортных средств, предотвращая закрытие сегментов пути, чтобы инспектировать и находить путь и интересующие субъекты, что зачастую приводит к потерям при коммерческой эксплуатации и необходимости приобретать и обслуживать дорогое оборудование. DARS дополнительно уменьшает количество времени, которое люди должны находиться в непосредственной близости от железнодорожных путей, приводя к меньшему общему числу несчастных случаев и возможной гибели людей.
[00127] Данные могут включать в себя, но не только, измеренные аналоговые и частотные параметры, такие как скорость, давление, температура, ток, напряжение и ускорение, которые исходят из подвижных объектов и/или близлежащих подвижных объектов; измеренные булевы данные, такие как позиции стрелки, позиции актуатора, предупредительная световая сигнализация и команды управления актуатором; информацию позиции, скорости и высоты над уровнем моря из данных глобальной системы позиционирования (GPS) и дополнительные данные из географической информационной системы (GIS), такие как широта и долгота различных интересующих субъектов; внутренне сформированную информацию, такую как нормативное ограничение скорости для подвижного объекта с учетом его текущей позиции; данные состояния и рабочие данные системы управления движением железнодорожных составов, сформированные посредством таких систем, как система точного управления движением железнодорожных составов (РТС); параметры транспортного средства и инерционные параметры, такие как скорость, ускорение и местоположение, к примеру, принимаемые из GPS; GIS-данные, такие как широта и долгота различных интересующих субъектов; видеоинформацию и информацию изображений, по меньшей мере, из одной камеры, расположенной в различных местоположениях в, на или около подвижного объекта; аудиоинформацию, по меньшей мере, из одного микрофона, расположенного в различных местоположениях в, на или около подвижного объекта; информацию относительно оперативного плана для подвижного объекта, которая отправляется в подвижный объект из центра данных, такую как информация маршрутов, расписаний и грузовых деклараций; информацию относительно окружающих условий, такую как текущая и спрогнозированная погода области, в которой подвижный объект в данный момент работает или планируется для работы; и данные, извлекаемые из комбинации любого из вышеуказанных источников, включающие в себя дополнительные данные, видео- и аудиоанализ и аналитику.
[00128] "Путь" может включать в себя, но не только, рельсы и шпалы железных дорог, используемых для транспортировки локомотива и/или железнодорожного состава. "Интересующие субъекты" могут включать в себя, но не только, различные субъекты инфраструктуры, установленные и обслуживаемые в непосредственной близости от железнодорожных путей, которые могут идентифицироваться с использованием искусственного интеллекта, такого как контролируемое обучение или стимулированное обучение, для снятых камерой изображений и видео объектов. Контролируемое обучение и/или стимулированное обучение использует заранее помеченные наборы данных, заданные в качестве "обучающих" данных, с тем чтобы обеспечивать возможность удаленной и автономной идентификации субъектов в пределах обзора камеры в, на или около подвижного объекта. Контролируемое обучение и/или стимулированное обучение обучает нейронные сетевые модели, чтобы идентифицировать шаблоны, возникающие в визуальных изображениях, полученных из камер. Эти шаблоны, такие как люди, переездные шлагбаумы, автомобили, деревья, сигналы, стрелки и т.д., содержатся только в одиночных изображениях. Последовательные кадры в видео также могут анализироваться на предмет шаблонов, таких как мигающие сигналы, движущиеся автомобили, заснувшие люди и т.д. DARS может требовать или может не требовать человеческого взаимодействия ни на одной стадии реализации, в том числе, но не только, пометки наборов обучающих данных, требуемых для контролируемого обучения и/или стимулированного обучения. Интересующие субъекты включают в себя, но не только, пути, точки центральной линии путей, путевые знаки, сигналы, переездные шлагбаумы, стрелки, переезды и текстовые знаки. "Видеоаналитика" означает любую понятную информацию, собираемую посредством анализа видео и/или изображений, записываемых из устройств измерения изображений, устройств измерения видео и/или устройств измерения дальности, таких как по меньшей мере одна камера, к примеру, камеры с обзором в 360 градусов, стационарные камеры, узкоугольные камеры, широкоугольные камеры, камеры типа "рыбий глаз" с обзором в 360 градусов, радар, лидар и/или другие камеры, в, на или около подвижного объекта, включающую в себя, но не только, интересующие субъекты, географические местоположения субъектов, преграды на пути, расстояния между интересующими субъектами и подвижным объектом, неправильное совмещение пути и т.д. Система видеоаналитики также может использоваться в любом подвижном объекте, жилом районе, пространстве или помещении, содержащем камеру наблюдения, чтобы улучшать видеонаблюдение. В подвижных объектах, система видеоаналитики экономично и эффективно предоставляет автономное обнаружение событий в занятой кабине машиниста для удаленно расположенных пользователей.
[00129] Фиг. 15 иллюстрирует полевую реализацию пятого варианта осуществления примерной системы 900 получения и записи данных (DARS) в реальном времени, в которой могут реализовываться аспекты раскрытия. DARS 900 представляет собой систему, которая доставляет информацию в реальном времени, видеоинформацию и аудиоинформацию из средства 902 записи данных на подвижном объекте 964 удаленно расположенным конечным пользователям 968 через центр 966 данных. Средство 902 записи данных устанавливается на транспортном средстве или подвижном объекте 964 и обменивается данными с любым числом различных источников информации через любую комбинацию проводных и/или беспроводных линий 942 связи для передачи данных, к примеру, через беспроводной шлюз / маршрутизатор (не показан). Средство 902 записи данных собирает видеоданные, аудиоданные и другие данные или информацию из широкого спектра источников, которые могут варьироваться на основе конфигурации объекта, через бортовые линии 942 связи для передачи данных. Средство 902 записи данных содержит локальный компонент запоминающего устройства, такой как аварийно-ударозащищенный запоминающий модуль 904, бортовой диспетчер 906 данных и кодер 908 данных в объекте 964. В шестом варианте осуществления, средство 902 записи данных также может включать в себя не-аварийно-ударозащищенное съемное устройство хранения данных (не показано). Примерный защищенный запоминающий модуль 904, например, может представлять собой аварийно-ударопрочный запоминающий модуль средства записи событий, который соответствует Своду федеральных нормативных актов и нормативным требованиям Федерального управления железных дорог, выживающий при аварии запоминающий блок, который соответствует Своду федеральных нормативных актов и/или нормативным требованиям Федеральной ассоциации гражданской авиации, аварийно-ударозащищенный запоминающий модуль в соответствии с любым действующим Сводом федеральных нормативных актов, либо любое другое подходящее защищенное запоминающее устройство, известное в данной области техники. Проводные и/или беспроводные линии связи для передачи данных могут включать в себя любое одно либо комбинацию дискретных сигнальных вводов, стандартных или собственных Ethernet-, последовательных соединений и беспроводных соединений.
[00130] DARS 900 дополнительно содержит систему 910 видеоаналитики, которая включает в себя компонент 914 обнаружения пути и/или субъектов и мониторинга инфраструктуры. Компонент 914 обнаружения пути и мониторинга инфраструктуры содержит компонент 924 искусственного интеллекта, такой как компонент контролируемого обучения и/или стимулированного обучения либо другой компонент на основе нейронных сетей или искусственного интеллекта, компонент 926 обнаружения и определения местоположения субъектов и компонент 928 обнаружения преград, который обнаруживает преграды, присутствующие на или около путей, и/или преграды для камер, такие как персонал, блокирующий вид камеры. В этой реализации, живые видеоданные захватываются, по меньшей мере, посредством одной камеры 940, смонтированной в кабине машиниста объекта 964, на объекте 964 или около объекта 964. Камеры 940 размещаются на соответствующей высоте и под углом, чтобы захватывать видеоданные в и вокруг объекта 964 и получать достаточную величину обзора для последующей обработки. Живые видеоданные и данные изображений захватываются перед и/или вокруг объекта 964 посредством камер 940 и подаются в компонент 914 обнаружения пути и/или субъектов и мониторинга инфраструктуры для анализа. Компонент 914 обнаружения пути и мониторинга инфраструктуры системы 910 видеоаналитики обрабатывает живые видеоданные и данные изображений покадрово, чтобы обнаруживать присутствие железнодорожных путей и любых интересующих субъектов. Либо параметры позиций камеры, такие как высота, угол, сдвиг, фокусная длина и поле обзора, могут подаваться в компонент 914 обнаружения пути и/или субъектов и мониторинга инфраструктуры, либо камеры 940 могут быть выполнены с возможностью позволять системе 910 видеоаналитики обнаруживать и определять позицию и параметры камеры.
[00131] Чтобы выполнять определение состояния, к примеру, обнаружение занятости кабины машиниста, система 910 видеоаналитики использует компонент 924 контролируемого обучения и/или стимулированного обучения и/или другие алгоритмы на основе искусственного интеллекта и обучения, чтобы оценивать, например, видеоданные из камер 940, данные 934 объектов, такие как скорость, GPS-данные и данные инерциальных датчиков, данные погодного компонента 936 и данные компонента 938 обработки данных деклараций по маршрутам / бригадам и GIS. Обнаружение занятости кабины машиниста по сути подвержено источникам шума окружающей среды, таким как свет, отражающийся от облаков, и солнечный свет, проходящий через здания и деревья в то время, когда объект перемещается. Чтобы обрабатывать шум окружающей среды, данные компонента 924 контролируемого обучения и/или стимулированного обучения, компонента 926 обнаружения и определения местоположения субъектов, компонента обнаружения преград, компонента 934 объектов, которые могут включать в себя скорость, GPS-данные и данные инерциальных датчиков, данные погодного компонента 936 и другие обучающие алгоритмы, компонуются вместе, чтобы формировать определения внутреннего и/или внешнего состояния, затрагивающие подвижный объект 964. Компонент 914 обнаружения пути и/или субъектов и мониторинга инфраструктуры также может включать в себя систему распознавания лиц, адаптированную с возможностью разрешать авторизацию доступа к локомотиву в качестве части системы безопасности локомотива в этом проиллюстрированном варианте осуществления, компонент обнаружения утомления, выполненный с возможностью отслеживать концентрацию внимания бригады, и компонент обнаружения активности, чтобы обнаруживать неавторизованные действия, такие как курение.
[00132] Дополнительно, система 910 видеоаналитики может принимать информацию местоположения, включающую в себя координаты по широте и по долготе сигнала, такого как столовый сигнал, сигнал светофора, сигнал ограничения скорости и/или сигнал субъекта около путей, от владельца объектов. Система 910 видеоаналитики затем определяет то, является или нет информация местоположения, принимаемая от владельца объектов, корректной. Если информация местоположения является корректной, система 910 видеоаналитики сохраняет информацию и не должна повторно проверять информацию местоположения снова в течение предварительно определенного количества времени, к примеру, выполнять проверку информации местоположения на ежемесячной основе. Если информация местоположения не является корректной, система 910 видеоаналитики определяет корректную информацию местоположения и сообщает корректную информацию местоположения владельцам объектов, сохраняет информацию местоположения и не должна повторно проверять информацию местоположения снова в течение предварительно определенного количества времени, к примеру, выполнять проверку информации местоположения на ежемесячной основе. Сохранение информации местоположения предоставляет более простое обнаружение сигнала, такого как столовый сигнал, сигнал светофора, сигнал ограничения скорости и/или сигналы субъектов около путей.
[00133] Искусственный интеллект, такой контролируемое обучение и/или стимулированное обучение, с использованием компонента 924 контролируемого обучения и/или стимулированного обучения, для путей выполняется посредством использования различной информации, полученной из последовательных кадров видео и/или изображений, а также с использованием дополнительной информации, принимаемой из центра 966 данных и компонента 934 обработки данных транспортного средства, которая включает в себя данные инерциальных датчиков и GPS-данные, чтобы определять обучаемые данные. Компонент 926 обнаружения и определения местоположения субъектов использует обучаемые данные, принимаемые из компонента 924 контролируемого обучения и/или стимулированного обучения, и конкретную информацию относительно подвижного объекта 964 и железной дороги, такую как, например, ширина и искривления путей, позиционирование шпал и скорость транспортного средства, , чтобы отличать железнодорожные пути, знаки, сигналы и т.д. от других субъектов, чтобы определять данные обнаружения субъектов. Компонент 928 обнаружения преград использует данные обнаружения субъектов, принимаемые из компонента 926 обнаружения и определения местоположения субъектов, такие как информация относительно преград, присутствующих на или около путей, и/или преград для камер, таких как персонал, блокирующий вид камер, и дополнительную информацию из погодного компонента 936, компонента 938 обработки деклараций по маршрутам / бригадам и GIS-данных и компонента 934 обработки данных транспортного средства, которые включают в себя данные инерциальных датчиков и GPS-данные, , чтобы повышать точность и определять данные обнаружения преград. Данные подвижных объектов из компонента 934 обработки данных транспортного средства включают в себя, но не только, скорость, местоположение, ускорение, угловую скорость относительно вертикальной оси / скорость наклона в продольном направлении и железнодорожные переезды. Любая дополнительная информация, принимаемая и используемая из центра 966 данных, включает в себя, но не только, круглосуточные сведения и географическую позицию подвижного объекта 964.
[00134] Интересующие инфраструктурные субъекты, информация, обработанная посредством компонента 914 обнаружения пути и/или субъектов и мониторинга инфраструктуры, и информация диагностики и мониторинга отправляется в кодер 908 данных средства 902 записи данных через бортовые линии 942 связи для передачи данных, чтобы кодировать данные. Средство 902 записи данных сохраняет кодированные данные в аварийно-ударозащищенном запоминающем модуле 904 и необязательно в необязательном не-аварийно-ударозащищенном съемном устройстве хранения данных по шестому варианту осуществления и отправляет кодированную информацию в удаленный диспетчер 946 данных в центре 966 данных через беспроводную линию 944 связи для передачи данных. Удаленный диспетчер 946 данных сохраняет кодированные данные в удаленном репозиторий 948 данных в центре 966 данных.
[00135] Чтобы выполнять обнаружение 928 преград или обнаружение 926 субъектов, к примеру, присутствие пути перед объектом, субъектов на и/или около путей, преград на или около путей и/или преград, блокирующих вид камер, 964, аналитическая система 910 транспортного средства использует компонент 924 контролируемого обучения и/или стимулированного обучения или другой искусственный интеллект, компонент 926 обнаружения и определения местоположения субъектов и компонент 928 обнаружения преград и другие алгоритмы обработки изображений, чтобы обрабатывать и оценивать данные изображений и видеоданные камер из камер 940 в реальном времени. Компонент 914 обнаружения пути и/или субъектов и мониторинга инфраструктуры использует обработанные видеоданные наряду с данными компонента 934 объектов, которые могут включать в себя скорость, GPS-данные и данные инерциальных датчиков, данные погодного компонента 936 и данные компонента 938 обработки маршрутов / бригад, деклараций и GIS-данных,, чтобы определять внешние определения состояния, к примеру, головные и хвостовые подвижные объекты, в реальном времени. При обработке данных изображений и видеоданных для обнаружения пути и/или субъектов, например, система 910 видеоаналитики автоматически конфигурирует параметры камер 940, необходимые для обнаружения пути, обнаруживает проезд через стрелки, подсчитывает число путей, обнаруживает все дополнительные пути вдоль стороны объекта 964, определяет путь, по которой в данный момент едет объект 964, обнаруживает дефекты геометрии пути, обнаруживает сценарии размытия пути, к примеру, обнаружение воды около пути в пределах заданных пределов путей, и обнаруживает сценарии отсутствующего ската или пути. Точность обнаружения субъектов зависит от существующего условия освещения в и вокруг объекта 964. DARS 900 должна обрабатывать различные условия освещения посредством использования дополнительных данных, собранных на борту объекта 964 и в центре 966 данных. DARS 900 улучшается с возможностью работать при различных условиях освещения, работать при различных погодных условиях, обнаруживать большее число интересующих субъектов, интегрироваться с существующими системами баз данных, чтобы создавать, проводить аудит и обновлять данные автоматически, обнаруживать несколько путей, работать согласованно с изогнутыми путями, обнаруживать любые преграды, обнаруживать любой дефект пути, который может, возможно, вызывать проблемы безопасности, и работать в недорогих встроенных системах.
[00136] Определение внутреннего и/или внешнего состояния из системы 910 видеоаналитики, такого как занятость кабины машиниста; обнаружение и определение местоположения субъектов, к примеру, обнаружение пути и обнаружение субъектов около путей; и обнаружение преград, таких как преграды на или около путей и преграды, блокирующие камеры, предоставляется в средство 902 записи данных, наряду с любыми данными из системы управления парком транспортных средств (VMS) или компонента 932 цифрового записывающего видеоустройства, через бортовые линии 942 связи для передачи данных. Средство 902 записи данных сохраняет определение внутреннего и/или внешнего состояния, данные компонента 926 обнаружения и определения местоположения субъектов и данные компонента 928 обнаружения преград в аварийно-ударозащищенном запоминающем модуле 904 и необязательно в не-аварийно-ударозащищенном съемном устройстве хранения данных по второму варианту осуществления и удаленном репозиторий 948 данных через удаленный диспетчер 946 данных, расположенный в центре 966 данных. Веб-сервер 958 предоставляет определение внутреннего и/или внешнего состояния, информацию компонента 926 обнаружения и определения местоположения субъектов и информацию компонента 928 обнаружения преград удаленно расположенному пользователю 968 через веб-клиент 962 по запросу.
[00137] Кодер 908 данных кодирует, по меньшей мере, минимальный набор данных, который типично задается посредством регулирующего органа. Кодер 908 данных принимает видеоданные, данные изображений и аудиоданные из любой из камер 940, системы 910 видеоаналитики и системы 932 видеоуправления и сжимает или кодирует и синхронизирует во времени данные, чтобы упрощать эффективную передачу и репликацию в реальном времени в удаленный репозиторий 948 данных. Кодер 908 данных передает кодированные данные в бортовой диспетчер 906 данных, который затем отправляет кодированные видеоданные, данные изображений и аудиоданные в удаленный репозиторий 948 данных через удаленный диспетчер 946 данных, расположенный в центре 966 данных, в ответ на запрос по требованию пользователем 968 либо в ответ на определенные рабочие условия, наблюдаемые на борту объекта 964. Бортовой диспетчер 906 данных и удаленный диспетчер 946 данных работают согласованно, чтобы управлять процессом репликации данных. Удаленный диспетчер 946 данных в центре 966 данных может управлять репликацией данных из множества объектов 964.
[00138] Бортовой диспетчер 906 данных определяет то, должно обнаруженное событие, определение внутреннего и/или внешнего состояния, обнаружение и определение местоположения субъектов и/или обнаружение преград, ставиться в очередь или отправляться сразу, на основе приоритезации обнаруженного события. Например, в нормальной рабочей ситуации, обнаружение преграды на пути является гораздо более срочным, чем обнаружение того, находится или нет кто-либо в кабине машиниста объекта 964. Бортовой диспетчер 906 данных также отправляет данные в репозиторий с постановкой в очередь (не показан). В режиме почти реального времени, бортовой диспетчер 906 данных сохраняет кодированные данные, принимаемые из кодера 908 данных, и любую информацию событий в аварийно-ударозащищенном запоминающем модуле 904 и в репозиторий с постановкой в очередь. После того, как пять минут кодированных данных накоплены в репозиторий с постановкой в очередь, бортовой диспетчер 906 данных сохраняет пять минут кодированных данных в удаленный репозиторий 948 данных через удаленный диспетчер 946 данных в центре 966 данных по беспроводной линии 944 связи для передачи данных. В режиме реального времени, бортовой диспетчер 908 данных сохраняет кодированные данные, принимаемые из кодера 908 данных, и любую информацию событий в аварийно-ударозащищенный запоминающий модуль 906 и в удаленный репозиторий 948 данных через удаленный диспетчер 946 данных в центре 966 данных по беспроводной линии 944 связи для передачи данных каждый конфигурируемый предварительно определенный период времени, к примеру, каждую секунду или каждые 0,10 секунды.
[00139] В этой реализации, бортовой диспетчер 906 данных отправляет видеоданные, аудиоданные, определение внутреннего и/или внешнего состояния, информацию обнаружения и определения местоположения субъектов, информацию обнаружения преград и любые другие данные или информацию событий в удаленный репозиторий 948 данных через удаленный диспетчер 946 данных в центре 966 данных через беспроводную линию 944 связи для передачи данных. Беспроводная линия 944 связи для передачи данных, например, может представлять собой беспроводную локальную вычислительную сеть (WLAN), беспроводную общегородскую вычислительную сеть (WMAN), беспроводную глобальную вычислительную сеть (WWAN), беспроводную виртуальную частную сеть (WVPN), сотовую телефонную сеть либо любое другое средство передачи данных из средства 902 записи данных, в этом примере, в удаленный диспетчер 946 данных. Процесс извлечения данных удаленно из объекта 964 требует беспроводного соединения между объектом 964 и центром 966 данных. Когда беспроводное соединение для передачи данных не доступно, данные сохраняются и ставятся в очередь до тех пор, пока беспроводное подключение не восстанавливается.
[00140] Параллельно с записью данных, средство 902 записи данных непрерывно и автономно реплицирует данные в удаленный репозиторий 948 данных. Процесс репликации имеет два режима, режим реального времени и режим почти реального времени. В режиме реального времени, данные реплицируются в удаленный репозиторий данных 948 каждую секунду. В режиме почти реального времени, данные реплицируются в удаленный репозиторий 948 данных каждые пять минут. Частоты, используемые для режима почти реального времени и режима реального времени, являются конфигурируемыми, и частота, используемая для режима реального времени, может регулироваться, чтобы поддерживать данные высокого разрешения посредством репликации данных в удаленный репозиторий 948 данных каждые 0,10 секунды. Режим почти реального времени используется в нормальном режиме работы, при большинстве условий, чтобы повышать эффективность процесса репликации данных.
[00141] Режим реального времени может инициироваться на основе событий, возникающих на борту объекта 964, либо посредством запроса, инициированного из центра 966 данных. Типичный инициированный центром 966 данных запрос на режим реального времени инициируется, когда удаленно расположенный пользователь 968 запрашивает информацию в реальном времени от веб-клиента 962. Типичная причина того, что режим реального времени берет начало на борту объекта 964, заключается в обнаружении события или происшествия, затрагивающего объект 964, такого как инициирование машинистом запроса на экстренную остановку, активность по экстренному торможению, быстрое ускорение или замедление по любой оси или потеря входной мощности в средство 902 записи данных. При переходе из режима почти реального времени в режим реального времени, все данные, еще не реплицированные в удаленный репозиторий 948 данных, реплицируются и сохраняются в удаленном репозиторий 948 данных, и затем живая репликация инициируется. Переход между режимом почти реального времени и режимом реального времени типично возникает менее чем за пять секунд. После того, как предварительно определенное количество времени прошло с момента события или происшествия, после предварительно определенного количества времени неактивности, либо когда пользователю 968 более не требуется информация в реальном времени из объекта 964, средство 902 записи данных возвращается в режим почти реального времени. Предварительно определенное количество времени, требуемое, чтобы инициировать переход, является конфигурируемым и типично задается равным десяти минутам.
[00142] Когда средство 902 записи данных находится в режиме реального времени, бортовой диспетчер 906 данных пытается непрерывно опустошать свою очередь в удаленный диспетчер 946 данных, сохраняя данные в аварийно-ударозащищенный запоминающий модуль 940 и необязательно в необязательное не-аварийно-ударозащищенное съемное устройство хранения данных по шестому варианту осуществления и отправляя данные в удаленный диспетчер 946 данных одновременно.
[00143] При приеме видеоданных, аудиоданных, определения внутреннего и/или внешнего состояния, информации обнаружения и определения местоположения субъектов, информации обнаружения преград и любых других данных или информации, которая должна реплицироваться, из средства 902 записи данных, удаленный диспетчер 946 данных сохраняет данные, которые он принимает из бортового диспетчера 906 данных, такие как кодированные данные и обнаруженные данные событий, в удаленный репозиторий 948 данных в центре 966 данных. Удаленный репозиторий 948 данных, например, может представлять собой облачное хранилище данных либо любое другое подходящее удаленное хранилище данных. Когда данные принимаются, инициируется процесс, который инструктирует декодеру 954 данных декодировать последние реплицированные данные из удаленного репозитория 948 данных и отправлять декодированные данные в компонент 950 информации обнаружения / определения местоположения пути / субъектов, который проверяет сохраненные данные на предмет дополнительных "постобработанных" событий. Компонент 950 информации обнаружения / определения местоположения пути / субъектов включает в себя компонент обнаружения субъектов/преград для определения определений внутреннего и/или внешнего состояния, информации обнаружения и определения местоположения субъектов и информации обнаружения преград, в этой реализации. При обнаружении внутренней и/или внешней информации, информации обнаружения и определения местоположения субъектов и/или информации обнаружения преград, компонент 950 информации обнаружения / определения местоположения пути / субъектов сохраняет информацию в удаленном репозиторий 948 данных.
[00144] Удаленно расположенный пользователь 968 может осуществлять доступ к видеоданным, аудиоданным, определению внутреннего и/или внешнего состояния, информации обнаружения и определения местоположения субъектов, информации обнаружения преград и любой другой информации, сохраненной в удаленном репозиторий 948 данных, включающей в себя информацию пути, информацию объектов и информацию занятости кабины машиниста, связанную с конкретным объектом 964 или с множеством объектов, с использованием стандартного веб-клиента 962, такого как веб-браузер или устройство в стиле виртуальной реальности (не показано), к примеру, устройство 828 в стиле виртуальной реальности по фиг. 8, которое, в этой реализации, может отображать миниатюрные изображения выбранных камер. Веб-клиент 962 передает запрос пользователя 968 на предмет информации на веб-сервер 958 через сеть 960 с использованием общих веб-стандартов, протоколов и технологий. Сеть 960, например, может представлять собой Интернет. Сеть 960 также может представлять собой локальную вычислительную сеть (LAN), общегородскую вычислительную сеть (MAN), глобальную вычислительную сеть (WAN), виртуальную частную сеть (VPN), сотовую телефонную сеть либо любое другое средство передачи данных из веб-сервера 958, в этом примере, в веб-клиент 962. Веб-сервер 958 запрашивает требуемые данные из удаленного репозитория 948 данных, и декодер 954 данных получает запрашиваемые данные, связанные с конкретным объектом 964, из удаленного репозитория 948 данных при запросе из веб-сервера 958. Декодер 954 данных декодирует запрашиваемые данные и отправляет декодированные данные в локализатор 956. Локализатор 956 идентифицирует настройки профиля, заданные пользователем 968, посредством осуществления доступа к веб-клиенту 962, и использует настройки профиля, чтобы подготавливать информацию, отправляемую в веб-клиент 962 для представления пользователю 968, в качестве необработанных кодированных данных, и обнаруженная информация обнаружения / определения местоположения пути / субъектов сохраняется в удаленный репозиторий 948 данных с использованием всемирного координированного времени (UTC) и международной системы единиц (единиц СИ). Локализатор 956 преобразует декодированные данные в формат, требуемый пользователем 968, такой как предпочтительная единица измерения и язык пользователя 968. Локализатор 956 отправляет локализованные данные в предпочтительном формате пользователя 968 на веб-сервер 958 по запросу. Веб-сервер 958 затем отправляет локализованные данные в веб-клиент 962 для просмотра и анализа, предоставления воспроизведения и отображения в реальном времени стандартного видео и видео с обзором в 360 градусов, наряду с определением внутреннего и/или внешнего состояния, информацией обнаружения и определения местоположения субъектов и информацией обнаружения преград, такой как обнаружение пути и/или субъектов (фиг. 16А), обнаружение пути и стрелок (фиг. 16В), обнаружение пути и/или субъектов, подсчет числа путей и обнаружение сигналов (фиг. 16С), обнаружение переездов и пути и/или субъектов (фиг. 16D), обнаружение двойных воздушных сигналов (фиг. 16Е), обнаружение нескольких путей и/или нескольких субъектов (фиг. 16F), обнаружение стрелок и пути и/или субъектов (фиг. 16G) и обнаружение стрелок (фиг. 16Н).
[00145] Веб-клиент 962 улучшается за счет программного приложения, которое предоставляет воспроизведение видео с обзором в 360 градусов и/или другого видео во множестве различных режимов. Пользователь 968 может выбирать режим, в котором программное приложение представляет воспроизведение видео, такой как, например, вид типа "рыбий глаз", вид без искажений, панорамный вид, двойной панорамный вид и квадратический вид.
[00146] Фиг. 17 является блок-схемой последовательности операций способа, показывающей процесс 970 для определения внутреннего состояния объекта 964 в соответствии с реализацией этого раскрытия. Система 910 видеоаналитики принимает сигналы данных из различных компонентов ввода (972), таких как камеры 940, включающих в себя, но не только, камеры с обзором в 360 градусов, стационарные камеры, узкоугольные камеры, широкоугольные камеры, камеры типа "рыбий глаз" с обзором в 360 градусов, радар, лидар и/или другие камеры, на, в или около объекта 964, компонент 934 обработки данных транспортного средства, погодный компонент 936 и компонент 938 обработки маршрутов / деклараций / GIS-данных. Система 910 видеоаналитики обрабатывает сигналы данных с использованием компонента контролируемого обучения и/или стимулированного обучения (974) и определяет внутреннее состояние (976), такое как занятость кабины машиниста.
[00147] Фиг. 18 является блок-схемой последовательности операций, показывающей процесс 980 для определения местоположения / обнаружения субъектов и обнаружения преград, возникающий внешне и внутренне по отношению к объекту 964 в соответствии с реализацией этого раскрытия. Система 910 видеоаналитики принимает сигналы данных из различных компонентов ввода (982), таких как камеры 940, включающих в себя, но не только, камеры с обзором в 360 градусов, стационарные камеры, узкоугольные камеры, широкоугольные камеры, камеры типа "рыбий глаз" с обзором в 360 градусов, радар, лидар и/или другие камеры, на, в или около объекта 964, компонент 934 обработки данных транспортного средства, погодный компонент 936 и компонент 938 обработки маршрутов / деклараций / GIS-данных. Система 910 видеоаналитики обрабатывает сигналы данных с использованием компонента 924 контролируемого обучения и/или стимулированного обучения, компонента 926 обнаружения / определения местоположения субъектов и компонента 928 обнаружения преград (984) и выполняет обнаружение преград (986) и обнаружение и определение местоположения субъектов (988), такое как присутствие пути.
[00148] Для простоты пояснения, процесс 970 и процесс 980 иллюстрируются и описываются в качестве последовательности этапов. Тем не менее, этапы в соответствии с этим раскрытием могут осуществляться в других порядках и/или параллельно. Дополнительно, этапы в соответствии с этим раскрытием могут осуществляться с другими этапами, не представленными и описанными в данном документе. Более того, не все проиллюстрированные этапы могут требоваться, чтобы реализовывать технологии в соответствии с заявленным предметом изобретения.
[00149] Система совместного использования данных для получения и записи данных в реальном времени работает в сочетании с системой получения и записи данных в реальном времени, такой как, например, DARS 100, 200, и средством просмотра, которое предоставляет доступ в реальном времени или почти в реальном времени к широкому диапазону данных, таких как данные событий и рабочие данные, видеоданные и аудиоданные, особо важного объекта, такого как локомотив, например, для удаленно расположенных пользователей, таких как владельцы объектов, машинисты и расследователи. Система получения и записи данных записывает данные, связанные с объектом, и передает в потоковом режиме данные в удаленный репозиторий данных и удаленно расположенным пользователям до, в ходе и после того, как возникает происшествие. Данные передаются в потоковом режиме в удаленный репозиторий данных в реальном времени или почти в реальном времени, обеспечивая доступность информации, по меньшей мере, вплоть до времени происшествия или аварийной ситуации, за счет этого фактически исключая необходимость находить и загружать "черный ящик", чтобы расследовать происшествие, затрагивающее объект, и исключая необходимость взаимодействовать с системой получения и записи данных на объекте, чтобы запрашивать загрузку конкретных данных, находить и передавать файлы и использовать пользовательское приложение, чтобы просматривать данные. Система получения и записи данных в реальном времени сохраняет типичную возможность записи и добавляет способность передавать в потоковом режиме данные в удаленный репозиторий данных и удаленно расположенным конечным пользователям до, в ходе и после происшествия.
[00150] Удаленно расположенный пользователь, такой как владелец объектов, машинист и/или расследователь, может осуществлять доступ к общему веб-браузеру, чтобы осуществлять навигацию к живым и/или хронологическим требуемым данным, связанным с выбранным объектом, чтобы просматривать и анализировать эффективность эксплуатации и безопасность объектов в реальном времени или почти в реальном времени. Способность просматривать операции в реальном времени или почти в реальном времени обеспечивает быструю оценку и регулирование поведения. В ходе происшествия, например, информация и/или данные в реальном времени могут упрощать сортировку ситуации и предоставлять ценную информацию сотрудникам аварийных служб. В нормальном режиме работы, например, информация и/или данные почти в реальном времени могут использоваться, чтобы проводить аудит производительности работы бригады и способствовать общесетевой ситуативной осведомленности.
[00151] Удаленно расположенный пользователь может осуществлять доступ к общему веб-браузеру, чтобы использовать средство просмотра и осуществлять навигацию к требуемым данным, связанным с выбранным объектом или множеством объектов, чтобы просматривать и анализировать эффективность и безопасность работы объектов в реальном времени или почти в реальном времени. Средство просмотра предоставляет способность просматривать операции и/или видео, в том числе, но не только, видео с обзором в 360 градусов, в реальном времени или почти в реальном времени, что обеспечивает быструю оценку и регулирование поведения бригады. Владельцы, машинисты и расследователи могут просматривать и анализировать эффективность эксплуатации, безопасность людей, транспортных средств и инфраструктуры и могут расследовать или инспектировать происшествие. В ходе происшествия, например, видео с углом обзора в 360 градусов может упрощать сортировку ситуации и предоставлять ценную информацию сотрудникам аварийных служб и расследователям. В нормальном режиме работы, например, видео с углом обзора в 360 градусов может использоваться, чтобы проводить аудит производительности работы бригады и способствовать общесетевой ситуативной осведомленности. Дополнительно, удаленно расположенные пользователи могут просматривать видео с углом обзора в 360 градусов с помощью средства просмотра в различных режимах через использование устройства в стиле виртуальной реальности или через стандартный веб-клиент, к примеру, через веб-браузер, за счет этого исключая необходимость загружать и использовать внешние приложения, чтобы просматривать видео.
[00152] Система совместного использования данных обеспечивает возможность пользователю совместно использовать данные, полученные из системы получения и записи данных, с удаленно расположенными пользователями. Пользователь может совместно использовать данные с удаленными конечными пользователями-получателями, которые имеют доступ в Интернет и современный веб-браузер, защищенным, управляемым, отслеживаемым и аудируемым способом. Пользователь, вместо совместно использования файлов, совместно использует URL-адрес для данных. Совместное использование данных на основе URL-адресов позволяет пользователю управлять, отслеживать и проводить аудит конфиденциальных данных. Пользователь должен иметь возможность совместно использовать данные, чтобы повышать уровень безопасности систем транспортировки в мире без опасности неавторизованного разглашения данных. Данные могут совместно использоваться расследователями с удаленно расположенными пользователями, с использованием веб-клиента, без необходимости находить и загружать "черный ящик".
[00153] Данные могут включать в себя, но не только, аналоговые и цифровые параметры, такие как скорость, давление, температура, ток, напряжение и ускорение, которые исходят из объекта и/или близлежащих объектов; булевы данные, такие как позиции стрелки, позиция актуатора, предупредительная световая сигнализация и команды управления актуатором; данные глобальной системы позиционирования (GPS) и/или данные географической информационной системы (GIS), такие как позиция, скорость и высота над уровнем моря; внутренне сформированную информацию, такую как нормативное ограничение скорости для объекта с учетом его текущей позиции; видеоинформацию и информацию изображений из камер, расположенных в различных местоположениях в, на или около объекта; аудиоинформацию из микрофонов, расположенных в различных местоположениях в, на или около объекта; информацию относительно оперативного плана для объекта, которая отправляется в объект из центра данных, такую как информация маршрутов, расписаний и грузовых деклараций; информацию относительно окружающих условий, включающих в себя текущие и спрогнозированные погодные условия для области, в которой объект в данный момент работает или планируется для работы; данные состояния и рабочие данные управления объектами, сформированные посредством таких систем, как система точного управления движением железнодорожных составов (РТС) в локомотивах; и данные, извлекаемые из комбинации из любого вышеуказанного, включающие в себя, но не только, дополнительные данные, видео- и аудиоанализ и аналитику.
[00154] Фиг. 1 и 2 иллюстрируют полевую реализацию первого варианта осуществления и второго варианта осуществления, соответственно, примерной системы 100, 200 получения и записи данных (DARS) в реальном времени, в которой могут реализовываться аспекты раскрытия. DARS 100, 200 включает в себя средство 154, 254 записи данных, которое устанавливается на транспортном средстве или подвижном объекте 148, 248 и обменивается данными с любым числом различных источников информации через любую комбинацию бортовых проводных и/или беспроводных линий 170, 270 связи для передачи данных, таких как беспроводной шлюз / маршрутизатор, или внебортовых источников информации через центр 150, 250 данных DARS 100, 200 через линии связи для передачи данных, к примеру, через беспроводные линии 146 связи для передачи данных. Средство 154, 254 записи данных содержит бортовой диспетчер 120, 220 данных, кодер 122, 222 данных, детектор 156, 256 событий транспортного средства, репозиторий 158, 258 с постановкой в очередь и беспроводной шлюз / маршрутизатор 172, 272. Дополнительно, в этой реализации, средство 154, 254 записи данных может включать в себя аварийно-ударозащищенный запоминающий модуль 118, 218 и/или Ethernet-коммутатор 162, 262 с/без подачи мощности по Ethernet (РОЕ). Примерный защищенный запоминающий модуль 118, 218, например, может представлять собой аварийно-ударопрочный запоминающий модуль средства записи событий, который соответствует Своду федеральных нормативных актов и нормативным требованиям Федерального управления железных дорог, выживающий при аварии запоминающий блок, который соответствует Своду федеральных нормативных актов и/или нормативным требованиям Федерального управления гражданской авиации, аварийно-ударозащищенный запоминающий модуль в соответствии с любым действующим Сводом федеральных нормативных актов, либо любое другое подходящее защищенное запоминающее устройство, известное в данной области техники. Во втором варианте осуществления, показанном на фиг. 2, средство 254 записи данных дополнительно может включать в себя необязательное не-аварийно-ударозащищенное съемное устройство 219 хранения данных.
[00155] Проводные и/или беспроводные линии 170, 270 связи для передачи данных могут включать в себя любое одно либо комбинацию дискретных сигнальных вводов, стандартных или собственных Ethernet-, последовательных соединений и беспроводных соединений. Ethernet-соединенные устройства могут использовать Ethernet-коммутатор 162, 262 средства 154, 254 записи данных и могут использовать РОЕ. Ethernet-коммутатор 162, 262 может быть внутренним или внешним и может поддерживать РОЕ. Дополнительно, данные из удаленных источников данных, таких как картографический компонент 164, 264, компонент 124, 224 обработки деклараций по маршрутам / бригадам и погодный компонент 126, 226 в реализации фиг. 1 и 2, доступны для бортового диспетчера 120, 220 данных и детектора 156, 256 событий транспортного средства из центра 150, 250 данных через беспроводную линию 146, 246 связи для передачи данных и беспроводной шлюз / маршрутизатор 172, 272.
[00156] Средство 154, 254 записи данных собирает данные или информацию из широкого спектра источников, которые могут значительно варьироваться на основе конфигурации объекта, через бортовые линии 170, 270 связи для передачи данных. Кодер 122, 222 данных кодирует, по меньшей мере, минимальный набор данных, который типично задается посредством регулирующего органа. В этой реализации, кодер 122, 222 данных принимает данные из широкого спектра источников объектов 148, 248 и источников центров 150, 250 данных. Источники информации могут включать в себя любое число компонентов в объекте 148, 248, к примеру, любое из аналоговых вводов 102, 202, цифровых вводов 104, 204, модуля 106, 206 ввода-вывода, контроллера 108, 208 транспортного средства, контроллера 110, 210 двигателя, инерциальных датчиков 112, 212, глобальной системы 114, 214 позиционирования (GPS), камеры 116, 216, сигнальных данных 166, 266 системы точного управления движением железнодорожных составов (РТС), данных 168, 268 топливной системы, детекторов сотовой передачи (не показаны), внутренне управляемых данных и любых дополнительных сигналов данных, и любое число компонентов в центре 150, 250 данных, к примеру, любое из компонента 124, 224 обработки деклараций по маршрутам / бригадам, погодного компонента 126, 226, картографического компонента 164, 264 и любых дополнительных сигналов данных. Камеры 116, 216 или устройства измерения изображений и/или устройства измерения видео включают в себя, но не только, камеры с обзором в 360 градусов, стационарные камеры, узкоугольные камеры, широкоугольные камеры, камеры типа "рыбий глаз" с обзором в 360 градусов и/или другие камеры внутри и снаружи объекта 148. Кодер 122, 222 данных сжимает или кодирует данные и синхронизирует во времени данные, чтобы упрощать эффективную передачу и репликацию в реальном времени в удаленный репозиторий 130, 230 данных. Кодер 122, 222 данных передает кодированные данные в бортовой диспетчер 120, 220 данных, который затем сохраняет кодированные данные в аварийно-ударозащищенном запоминающем модуле 118, 218 и репозиторий 158, 258 с постановкой в очередь для репликации в удаленный репозиторий 130, 230 данных через удаленный диспетчер 132, 232 данных, расположенный в центре 150, 250 данных. Необязательно, бортовой диспетчер 120, 220 данных может сохранять третичную копию кодированных данных в не-аварийно-ударозащищенном съемном устройстве 219 хранения данных по второму варианту осуществления, показанном на фиг. 2. Бортовой диспетчер 120, 220 данных и удаленный диспетчер 132, 232 данных работают согласованно, чтобы управлять процессом репликации данных. Один удаленный диспетчер 132, 232 данных в центре 150, 250 данных может управлять репликацией данных из множества объектов 148, 248.
[00157] Данные из различных компонентов ввода и данные из аудио-/графического пользовательского интерфейса 160, 260 (GUI) в кабине машиниста отправляются в детектор 156, 256 событий транспортного средства. Детектор 156, 256 событий транспортного средства обрабатывает данные, чтобы определять то, возникает либо нет событие, происшествие или другая предварительно заданная ситуация, затрагивающая объект 148, 248. Когда детектор 156, 256 событий транспортного средства обнаруживает сигналы, которые указывают, что предварительно заданное событие возникает, детектор 156, 256 событий транспортного средства отправляет обработанные данные в отношении того, что предварительно заданное событие возникает, наряду с подтверждающими данными, сопровождающими предварительно заданное событие, в бортовой диспетчер 120, 220 данных. Детектор 156, 256 событий транспортного средства обнаруживает события на основе данных из широкого спектра источников, таких как аналоговые вводы 102, 202, цифровые вводы 104, 204, модуль 106, 206 ввода-вывода, контроллер 108, 208 транспортного средства, контроллер 110, 210 двигателя, инерциальные датчики 112, 212, GPS 114, 214, камеры 116, 216, компонент 124, 224 обработки деклараций по маршрутам / бригадам, погодный компонент 126, 226, картографический компонент 164, 264, сигнальные РТС-данные 166, 266 и данные 168, 268 топливной системы, которые могут варьироваться на основе конфигурации объекта. Когда детектор 156, 256 событий транспортного средства обнаруживает событие, обнаруженная информация событий объектов сохраняется в репозиторий 158, 258 с постановкой в очередь и необязательно может представляться бригаде объекта 148, 248 через аудио-/графический пользовательский интерфейс 160, 260 (GUI) в кабине машиниста.
[00158] Бортовой диспетчер 120, 220 данных также отправляет данные в репозиторий 158 с постановкой в очередь. В режиме почти реального времени, бортовой диспетчер 120, 220 данных сохраняет кодированные данные, принимаемые из кодера 122, 222 данных, и любую информацию событий в аварийно-ударозащищенном запоминающем модуле 118, 218 и в репозиторий 158, 258 с постановкой в очередь. Во втором варианте осуществления по фиг. 2, бортовой диспетчер 220 данных необязательно может сохранять кодированные данные в не-аварийно-ударозащищенном съемном устройстве 219 хранения данных. После того, как пять минут кодированных данных накоплены в репозиторий 158, 258 с постановкой в очередь, бортовой диспетчер 120, 220 данных сохраняет пять минут кодированных данных в удаленный репозиторий 130, 230 данных через удаленный диспетчер 132, 232 данных в центре 150, 250 данных по беспроводной линии 146, 256 связи для передачи данных, доступной через беспроводной шлюз / маршрутизатор 172, 272. В режиме реального времени, бортовой диспетчер 120, 220 данных сохраняет кодированные данные, принимаемые из кодера 122, 222 данных, и любую информацию событий в аварийно-ударозащищенный запоминающий модуль 118, 218 и необязательно в не-аварийно-ударозащищенное съемное устройство 219 хранения данных по фиг. 2 и в удаленный репозиторий 130, 230 данных через удаленный диспетчер 132, 232 данных в центре 150, 250 данных по беспроводной линии 146, 246 связи для передачи данных, доступной через беспроводной шлюз / маршрутизатор 172, 272. Бортовой диспетчер 120, 220 данных и удаленный диспетчер 132, 232 данных могут обмениваться данными по множеству линий беспроводной связи, к примеру, через Wi-Fi-, сотовые, спутниковые и частные беспроводные системы с использованием беспроводного шлюза / маршрутизатора 172, 272. Беспроводная линия 146, 246 связи для передачи данных, например, может представлять собой беспроводную локальную вычислительную сеть (WLAN), беспроводную общегородскую вычислительную сеть (WMAN), беспроводную глобальную вычислительную сеть (WWAN), частную беспроводную систему, сотовую телефонную сеть либо любое другое средство передачи данных из средства 154, 254 записи данных DARS 100, 200, в этом примере, в удаленный диспетчер 130, 230 данных из DARS 100, 200. Когда беспроводное соединение для передачи данных не доступно, данные сохраняются в запоминающем устройстве и ставятся в очередь в репозиторий 158, 258 с постановкой в очередь до тех пор, пока беспроводное подключение не восстанавливается, и процесс репликации данных не может возобновляться.
[00159] Параллельно с записью данных, средство 154, 254 записи данных непрерывно и автономно реплицирует данные в удаленный репозиторий 130, 230 данных. Процесс репликации имеет два режима, режим реального времени и режим почти реального времени. В режиме реального времени, данные реплицируются в удаленный репозиторий 130, 230 данных каждую секунду. В режиме почти реального времени, данные реплицируются в удаленный репозиторий 130, 230 данных каждые пять минут. Частоты, используемые для режима почти реального времени и режима реального времени, являются конфигурируемыми, и частота, используемая для режима реального времени, может регулироваться, чтобы поддерживать данные высокого разрешения посредством репликации данных в удаленный репозиторий 130, 230 данных каждые 0,10 секунды. Когда DARS 100, 200 находится в режиме почти реального времени, бортовой диспетчер 120, 220 данных ставит данные в очередь в репозиторий 158, 258 с постановкой в очередь до репликации данных в удаленный диспетчер 132, 232 данных. Бортовой диспетчер 120, 220 данных также реплицирует информацию детектора событий транспортного средства, поставленную в очередь в репозиторий 158, 258 с постановкой в очередь, в удаленный диспетчер 132, 232 данных. Режим почти реального времени используется в нормальном режиме работы, при большинстве условий, чтобы повышать эффективность процесса репликации данных.
[00160] Режим реального времени может инициироваться на основе событий, возникающих и обнаруживаемых посредством детектора 156, 256 событий транспортного средства на борту объекта 148, 248, либо посредством запроса, инициированного из центра 150, 250 данных. Типичный инициированный центром 150, 250 данных запрос на режим реального времени инициируется, когда удаленно расположенный пользователь 152, 252 запрашивает информацию в реальном времени из веб-клиента 142, 242. Типичная причина того, что режим реального времени берет начало на борту объекта 148, 248, заключается в обнаружении события или происшествия посредством детектора 156, 256 событий транспортного средства, такого как инициирование, машинистом, запроса на экстренную остановку, активность по экстренному торможению, быстрое ускорение или замедление по любой оси или потеря входной мощности в средство 154, 254 записи данных. При переходе из режима почти реального времени в режим реального времени, все данные, еще не реплицированные в удаленный репозиторий 130, 230 данных, реплицируются и сохраняются в удаленном репозиторий 130, 230 данных, и после этого репликация вживую инициируется. Переход между режимом почти реального времени и режимом реального времени типично возникает менее чем за пять секунд. После того, как предварительно определенное количество времени прошло с момента события или происшествия, после предварительно определенного количества времени неактивности, либо когда пользователю 152, 252 более не требуется информация в реальном времени из объекта 148, 248, средство 154, 254 записи данных возвращается в режим почти реального времени. Предварительно определенное количество времени, требуемое, чтобы инициировать переход, является конфигурируемым и типично задается равным десяти минутам.
[00161] Когда средство 154, 254 записи данных находится в режиме реального времени, бортовой диспетчер 120, 220 данных пытается непрерывно опустошать свою очередь в удаленный диспетчер 132, 232 данных, сохраняя данные в аварийно-ударозащищенный запоминающий модуль 118, 218 и необязательно в не-аварийно-ударозащищенное съемное устройство 219 хранения данных по фиг. 2 и отправляя данные в удаленный диспетчер 132, 232 данных одновременно. Бортовой диспетчер 120, 220 данных также отправляет обнаруженную информацию транспортного средства, поставленную в очередь в репозиторий 158, 258 с постановкой в очередь, в удаленный диспетчер 132, 232 данных.
[00162] При приеме данных, которые должны реплицироваться, из средства 154, 254 записи данных, наряду с данными из картографического компонента 164, 264, компонента 124, 224 обработки деклараций по маршрутам / бригадам и погодного компонента 126, 226, удаленный диспетчер 132, 232 данных сохраняет сжатые данные в удаленный репозиторий 130, 230 данных в центре 150, 250 данных DARS 100, 200. Удаленный репозиторий 130, 230 данных, например, может представлять собой облачное хранилище данных либо любое другое подходящее удаленное хранилище данных. Когда данные принимаются, инициируется процесс, который инструктирует декодеру 136, 236 данных декодировать последние реплицированные данные для/из удаленного репозитория 130, 230 данных и отправлять декодированные данные в удаленный детектор 134, 234 событий. Удаленный диспетчер 132, 232 данных сохраняет информацию событий транспортного средства в удаленном репозиторий 130, 230 данных. Когда удаленный детектор 134, 234 событий принимает декодированные данные, он обрабатывает декодированные данные, чтобы определять то, обнаружено или нет интересующее событие в декодированных данных. Декодированная информация затем используется посредством удаленного детектора 134, 234 событий, чтобы обнаруживать события, происшествия или другие предварительно заданные ситуации, в данных, возникающих с объектом 148, 248. При обнаружении интересующего события из декодированных данных, ранее сохраненных в удаленном репозиторий 130, 230 данных, удаленный детектор 134, 234 событий сохраняет информацию событий и подтверждающие данные в удаленном репозиторий 130, 230 данных. Когда удаленный диспетчер 132, 232 данных принимает информацию удаленного детектора 134, 234 событий, удаленный диспетчер 132, 232 данных сохраняет информацию в удаленном репозиторий 130, 230 данных.
[00163] Удаленно расположенный пользователь 152, 252 может осуществлять доступ к информации, включающей в себя информацию детектора событий транспортного средства, связанную с конкретным объектом 148, 248 или с множеством объектов, с использованием стандартного веб-клиента 142, 242, такого как веб-браузер или устройство в стиле виртуальной реальности (не показано), которое, в этой реализации, может отображать миниатюрные изображения из выбранных камер. Веб-клиент 142, 242 передает запрос пользователя 152, 252 на предмет информации на веб-сервер 140, 240 через сеть 144, 244 с использованием общих веб-стандартов, протоколов и технологий. Сеть 144, 244, например, может представлять собой Интернет. Сеть 144, 244 также может представлять собой локальную вычислительную сеть (LAN), общегородскую вычислительную сеть (MAN), глобальную вычислительную сеть (WAN), виртуальную частную сеть (VPN), сотовую телефонную сеть либо любое другое средство передачи данных из веб-сервера 140, 240, в этом примере, в веб-клиент 142, 242. Веб-сервер 140, 240 запрашивает требуемые данные из декодера 136, 236 данных. Декодер 136, 236 данных получает запрашиваемые данные, связанные с конкретным объектом 148, 248 или с множеством объектов, из удаленного репозитория 130, 230 данных при запросе из веб-сервера 140, 240. Декодер 136, 236 данных декодирует запрашиваемые данные и отправляет декодированные данные в локализатор 138, 238. Локализация представляет собой процесс преобразования данных в форматы, требуемые конечным пользователем, к примеру, преобразования данных в предпочтительный язык и единицы измерения пользователя. Локализатор 138, 238 идентифицирует настройки профиля, заданные пользователем 152, 252, посредством осуществления доступа к веб-клиенту 142, 242, и использует настройки профиля, чтобы подготавливать информацию, отправляемую в веб-клиент 142, 242 для представления пользователю 152, 252 на предпочтительном языке и единицах измерения пользователя, в качестве необработанных кодированных данных, и обнаруженная информация событий сохраняется в удаленный репозиторий 130, 230 данных с использованием всемирного координированного времени (UTC) и международной системы единиц (единиц СИ). Локализатор 138, 238 преобразует декодированные данные в формат, требуемый пользователем 152, 252, такой как предпочтительный язык и единицы измерения пользователя 152, 252. Локализатор 138, 238 отправляет локализованные данные в предпочтительном формате пользователя 152, 252 на веб-сервер 140, 240 по запросу. Вебсервер 140, 240 затем отправляет локализованные данные объекта или множества объектов в веб-клиент 142, 242 для просмотра и анализа, предоставляя воспроизведение и отображение в реальном времени стандартного видео и видео с углом обзора в 360 градусов через средство просмотра. Веб-клиент 142, 242 может отображать, и пользователь 152, 252 может просматривать данные, видео и аудио для одного объекта или одновременно просматривать данные, видео и аудио для множества объектов. Веб-клиент 142, 242 также может предоставлять синхронное воспроизведение и отображение в реальном времени данных наряду с множеством видео- и аудиоданных и как стандартных видеоисточников, так и из видеоисточников с обзором в 360 градусов на, в или около объекта, близлежащих объектов и/или удаленно расположенных площадок. Веб-клиент 142, 242 может воспроизводить видеоданные на средстве просмотра для пользователя 152, 252, который может взаимодействовать с видео для просмотра и анализа. Пользователь 152, 252 также может загружать видеоданные с использованием веб-клиента 142, 242 и затем может использовать устройство в стиле виртуальной реальности, к примеру, устройство 828 в стиле виртуальной реальности по фиг. 8, , чтобы взаимодействовать с видеоданными на средстве просмотра для просмотра и анализа.
[00164] Веб-клиент 142, 242 улучшается за счет программного приложения, которое предоставляет воспроизведение видеоданных и/или видео с углом обзора в 360 градусов во множестве различных режимов. Пользователь 152, 252 может выбирать режим, в котором программное приложение представляет воспроизведение видео, такой как, например, вид типа "рыбий глаз", панорамный вид без искажений, двойной панорамный вид без искажений и квадратический вид без искажений.
[00165] Пользователь 152, 252 дополнительно может совместно использовать данные с удаленно расположенными конечными пользователями-получателями, которые имеют доступ в Интернет и современный веб-браузер, защищенным, управляемым, отслеженным и аудируемым способом, с использованием системы совместного использования данных настоящего раскрытия. Пользователь 152, 252, вместо совместно использования файлов, совместно использует URL-адрес для данных. Совместное использование данных на основе URL-адресов позволяет пользователю управлять, отслеживать и проводить аудит конфиденциальных данных. Пользователь должен иметь возможность совместно использовать данные, чтобы повышать уровень безопасности систем транспортировки в мире без опасности неавторизованного разглашения данных. Администратор имеет разрешение на, чтобы увеличивать и/или уменьшать собственные разрешения пользователя 152, 252 и каждого удаленно расположенного конечного пользователя-получателя. Собственное разрешение пользователя 152, 252 и каждого удаленно расположенного конечного пользователя-получателя определяет разрешения, которые конкретный удаленно расположенный конечный пользователь-получатель имеет, чтобы просматривать данные на веб-клиенте 142, 242. Система совместного использования данных используется владельцами объектов 148, 248, машинистами и расследователями, чтобы совместно использовать данные в реальном времени относительно эффективности эксплуатации и безопасности транспортных средств. Совместное использование данных обеспечивает быструю оценку и регулирование поведения.
[00166] Фиг. 19 является блок-схемой последовательности операций способа, показывающей процесс 990 для совместного использования данных и/или информации из объекта 148, 248 через веб-браузер, к примеру, через веб-браузер 826 по фиг. 8, или в устройство в стиле виртуальной реальности, к примеру, в устройство 828 в стиле виртуальной реальности по фиг. 8. Типично, пользователь 152, 252 должен запрашивать, что центр 150, 250 данных совместно использует данные объекта 148, 248 с использованием веб-клиента 142, 242 (992) (фиг. 19). Типичная причина совместного использования данных заключается в обнаружении происшествия, такого как инициирование, машинистом, запроса на экстренную остановку, активность по экстренному торможению, быстрое ускорение или замедление по любой оси и/или потеря входной мощности в DARS 100, 200. Файлы не должны загружаться или отправляться удаленно расположенному конечному пользователю-получателю. Пользователь 152, 252 не должен иметь возможность совместно использовать больше, чем позволяет собственное разрешение на веб-клиенте 142, 242. Удаленно расположенный конечный пользователь-получатель должен иметь возможность видеть данные на основе собственных разрешений на веб-клиенте 142, 242. Такая активность по совместному использованию регистрируется посредством веб-клиента 142, 242 в центре 150, 250 данных. Администратор имеет возможность совместно использовать данные с множеством пользователей 152, 252, которые первоначально не имеют доступа к данным через веб-клиент 142, 242, с использованием эскалации разрешений. Такая активность по эскалации разрешений должна регистрироваться посредством веб-клиента 142, 242 в центре 150, 250 данных.
[00167] Как пояснено выше, пользователь 152, 252 осуществляет доступ к информации, включающей в себя информацию детектора 156, 256 событий транспортного средства, с использованием веб-клиента 142, 242. С использованием общих веб-стандартов, протоколов и технологий, таких как Интернет или частная сеть 144, 244, веб-клиент 142, 242 обменивается данными с веб-сервером 140, 240 информацией, требуемой пользователем 152, 252. Веб-сервер 140, 240 запрашивает требуемые данные из декодера 136, 236 данных. Данные извлекаются посредством декодера 136, 236 данных, и затем данные локализуются посредством локализатора 138, 238, преобразующего данные в форматы, требуемые пользователем 152, 252, как описано выше. Веб-сервер 140, 240 затем отправляет локализованные данные в веб-клиент 142, 242 для просмотра и анализа (994) (фиг. 19).
[00168] Совместно использующий конечный пользователь 152, 252 может совместно использовать эту информацию, включающую в себя информацию детектора 156, 256 событий транспортного средства и видеоданные, с множеством удаленно расположенных конечных пользователей-получателей с использованием веб-клиента 142, 242, независимо от того, имеет или нет конечный пользователь-получатель предварительно зарегистрированную учетную запись на веб-клиенте 142, 242. Совместно использующий конечный пользователь 152, 252 может совместно использовать информацию и данные с множеством удаленно расположенных конечных пользователей-получателей независимо от того, имеет или нет конечный пользователь-получатель предварительно зарегистрированную учетную запись на веб-клиенте 142, 242. В ходе этого процесса, веб-клиент 142, 242 формирует почтовое сообщение с URL-адресом, который указывает на данные в центре 150, 250 данных (996) (фиг. 19). Удаленно расположенный конечный пользователь-получатель принимает почтовое сообщение с URL-адресом, чтобы осуществлять доступ к данным. URL-адрес не представляет собой ссылку на файлы. Файлы не используются совместно с конечными пользователями-получателями. Данные представляют собой не дискретный файл, а диапазон данных, извлекаемых из удаленного репозитория 130 данных на основе совместно используемой ссылки на веб-средство просмотра. URL-адрес, отправленный через почтовое сообщение, представляет собой ссылку на веб-средство просмотра, которое обеспечивает возможность конечному пользователю-получателю просматривать конкретный сегмент данных, синхронизированных с неподвижными изображениями и видео, через веб-средство просмотра. Когда удаленно расположенный конечный пользователь-получатель щелкает URL-адрес, он должен иметь возможность осуществлять доступ к совместно используемой информации с использованием собственного веб-клиента 142, 242, и активность по совместному использованию должна регистрироваться посредством веб-клиента 142, 242 в центре 150, 250 данных.
[00169] Для простоты пояснения, процесс 990 иллюстрируется и описывается в качестве последовательности этапов. Тем не менее, этапы в соответствии с этим раскрытием могут осуществляться в других порядках и/или параллельно. Дополнительно, этапы в соответствии с этим раскрытием могут осуществляться с другими этапами, не представленными и описанными в данном документе. Более того, не все проиллюстрированные этапы могут требоваться, чтобы реализовывать технологии в соответствии с заявленным предметом изобретения.
[00170] Седьмой вариант осуществления системы получения и записи данных в реальном времени и системы автоматизированного мониторинга соответствия сигналов требованиям и выдачи аварийных оповещений, описанных в данном документе, предоставляет доступ в реальном времени или почти в реальном времени к широкому диапазону данных, таких как данные событий и рабочие данные, видеоданные и аудиоданные, связанные с особо важным объектом, удаленно расположенным пользователям, таким как владельцы объектов, машинисты и расследователи. Система автоматизированного мониторинга соответствия сигналов требованиям и выдачи аварийных оповещений записывает данные, через средство записи данных, связанные с объектом, и передает в потоковом режиме данные в удаленный репозиторий данных и удаленно расположенным пользователям до, в ходе и после того, как возникает происшествие. Данные передаются в потоковом режиме в удаленный репозиторий данных в реальном времени или почти в реальном времени, обеспечивая доступность информации, по меньшей мере, вплоть до времени происшествия или аварийной ситуации, за счет этого фактически исключая необходимость находить и загружать "черный ящик", чтобы расследовать происшествие, затрагивающее объект, и исключая необходимость взаимодействовать со средством записи данных в объекте, чтобы запрашивать загрузку конкретных данных, находить и передавать файлы и использовать пользовательское приложение, чтобы просматривать данные. Система настоящего раскрытия сохраняет типичные возможности записи и добавляет способность передавать в потоковом режиме данные в удаленный репозиторий данных и удаленным конечным пользователям до, в ходе и после происшествия. В подавляющем большинстве ситуаций, информация, записываемая в средстве записи данных, является избыточной и не требуется, поскольку данные уже получаются и сохраняются в удаленном репозиторий данных.
[00171] Система автоматизированного мониторинга сигналов и выдачи аварийных оповещений также автоматически отслеживает и предоставляет хронологические аварийные оповещения и аварийные оповещения в реальном времени для подвижных объектов, таких как локомотивы, железнодорожные составы, самолеты и автомобили, при нарушении показания сигнала, такого как стоп-сигнал, сигнал светофора и/или сигнал ограничения скорости, либо при небезопасной работе подвижного объекта в попытке поддерживать соответствие требованиям сигнала, такого как стоп-сигнал, сигнал светофора и/или сигнал ограничения скорости. Система автоматизированного мониторинга сигналов и выдачи аварийных оповещений комбинирует использование аналитики по изображениям, определения местоположения по GPS, тормозных сил и скорости транспортных средств, а также автоматизированных электронных уведомлений, чтобы выдавать аварийные оповещения персоналу на борту и/или не на борту подвижного объекта в реальном времени, когда подвижный объект нарушает правила безопасной эксплуатации, к примеру, когда стоп-сигнал передается посредством подвижного объекта до остановки и получения разрешения (нарушение сигнала красного света), когда ограничивающий сигнал, указывающий сниженные ограничения скорости, нарушается посредством подвижного объекта, движущегося на большей скорости, и/или когда подвижный объект прикладывает поздние и/или чрезмерные тормозные силы, чтобы останавливаться перед проездом стоп-/красного сигнала.
[00172] До системы автоматизированного мониторинга сигналов и выдачи аварийных оповещений настоящего раскрытия, персонал центра управления полагался на бригады подвижных объектов, чтобы сообщать, когда нарушается правило безопасной эксплуатации. Иногда в результате возникает катастрофическое лобовое столкновение подвижных объектов, при этом проводятся последующие расследования на предмет понимания нарушения правил безопасной эксплуатации. Дополнительно, чрезмерные тормозные силы могут вызывать механической сбой части подвижного объекта, и в ситуациях, когда подвижный объект представляет собой локомотив и/или железнодорожный состав, чрезмерные тормозные силы могут приводить к крушению, при этом последующие расследования находят нарушение правил безопасной эксплуатации в качестве коренной причины. Система настоящего раскрытия обеспечивает возможность пользователям отслеживать и получать аварийные оповещения, когда возникает нарушение правил безопасной эксплуатации, до возникновения механического сбоя, столкновения, крушения и/или другого аварийного происшествия.
[00173] Конечный пользователь может подписываться на получение аварийных оповещений, когда нарушение правил безопасной эксплуатации возникает, и должен принимать почтовое сообщение, текстовое сообщение и/или электронные уведомления в браузере в течение нескольких минут после возникновения фактического события. Конечный пользователь может использовать хронологические записи, чтобы анализировать данные, с тем чтобы идентифицировать шаблоны, такие как, например, проблемные местоположения, нарушенная линия прямой видимости, неисправное оборудование и неквалифицированные бригады, которые могут быть полезными в реализации новых и более безопасных правил эксплуатации или учебно-образовательных программ бригад для непрерывного совершенствования. Система настоящего раскрытия обеспечивает возможность конечному пользователю использовать непрерывный электронный мониторинг и обширную аналитику по изображениям, чтобы понимать все без исключения случаи, когда подвижный объект работает небезопасно вследствие нарушения правил безопасной эксплуатации и/или несоответствия требованиям сигналов.
[00174] Система автоматизированного мониторинга сигналов и выдачи аварийных оповещений используется владельцами транспортных средств и/или подвижных объектов, машинистами и расследователями, чтобы просматривать и анализировать эффективность и безопасность эксплуатации подвижных объектов в реальном времени. Способность просматривать операции в реальном времени обеспечивает быструю оценку и регулирование поведения. В ходе происшествия, информация в реальном времени может упрощать сортировку ситуации и предоставлять ценную информацию сотрудникам аварийных служб. В нормальном режиме работы, информация почти в реальном времени может использоваться, чтобы проводить аудит эффективности работы бригады и повышать безопасность и компетентность при работе во всей сети.
[00175] Система автоматизированного мониторинга сигналов и выдачи аварийных оповещений использует обращенные наружу камеры и/или другие камеры, определение местоположения по GPS, скорость и ускорение, а также данные датчиков тормозного давления транспортных средств, железнодорожных составов и/или подвижных объектов в полностью интегрированной автоматизированной системе с временной синхронизацией, чтобы идентифицировать практику небезопасной и потенциально катастрофической эксплуатации, с тем чтобы предоставлять обратную связь в реальном времени в бригады и руководящий состав подвижных объектов. Система автоматизированного мониторинга сигналов и выдачи аварийных оповещений также предоставляет автоматизированную загрузку данных и видео пользователям с помощью различных источников данных, с тем чтобы обеспечивать полные сведения относительно рабочей среды во время выдачи аварийных оповещений.
[00176] Данные могут включать в себя, но не только, аналоговые и цифровые параметры, такие как скорость, давление, температура, ток, напряжение и ускорение, которые исходят из объекта и/или близлежащих объектов; булевы данные, такие как позиции стрелки, позиция актуатора, предупредительная световая сигнализация и команды управления актуатором; данные глобальной системы позиционирования (GPS) и/или данные географической информационной системы (GIS), такие как позиция, скорость и высота над уровнем моря; внутренне сформированную информацию, такую как нормативное ограничение скорости для объекта с учетом его текущей позиции; видеоинформацию и информацию изображений из камер, расположенных в различных местоположениях в, на или около объекта; аудиоинформацию из микрофонов, расположенных в различных местоположениях в, на или около объекта; информацию относительно оперативного плана для объекта, которая отправляется в объект из центра данных, такую как информация маршрутов, расписаний и грузовых деклараций; информацию относительно окружающих условий, включающих в себя текущие и спрогнозированные погодные условия для области, в которой объект в данный момент работает или планируется для работы; данные состояния и рабочие данные управления объектами, сформированные посредством таких систем, как система точного управления движением железнодорожных составов (РТС) в локомотивах; и данные, извлекаемые из комбинации из любого вышеуказанного, включающие в себя, но не только, дополнительные данные, видео- и аудиоанализ и аналитику.
[00177] Фиг. 19 иллюстрирует полевую реализацию седьмого варианта осуществления примерной системы 1000 получения и записи данных (DARS) в реальном времени и системы 1080 автоматизированного мониторинга сигналов и выдачи аварийных оповещений, в которых могут реализовываться аспекты раскрытия. DARS 1000 представляет собой систему, которая доставляет информацию в реальном времени удаленно расположенным конечным пользователям из устройства записи данных. DARS 1000 включает в себя средство 1054 записи данных, которое устанавливается на транспортном средстве или подвижном объекте 1048 и обменивается данными с любым числом различных источников информации через любую комбинацию бортовых проводных и/или беспроводных линий 1070 связи для передачи данных, таких как беспроводной шлюз / маршрутизатор или внебортовые источники информации через центр 1050 данных DARS 1000 через линии связи для передачи данных, такие как беспроводные линии 1046 связи для передачи данных. Средство 1054 записи данных содержит бортовой диспетчер 1020 данных, кодер 1022 данных, детектор 1056 событий транспортного средства, репозиторий 1058 с постановкой в очередь и беспроводной шлюз / маршрутизатор 1072. Дополнительно, в этой реализации, средство 1054 записи данных может включать в себя аварийно-ударозащищенный запоминающий модуль 1018 и/или Ethernet-коммутатор 1062 с или без подачи мощности по Ethernet (РОЕ). Примерный защищенный запоминающий модуль 1018, например, может представлять собой аварийно-ударопрочный запоминающий модуль средства записи событий, который соответствует требованиям Свода федеральных нормативных актов и/или нормативным требованиям Федерального управления железных дорог, выживающий при аварии запоминающий блок, который соответствует требованиям Свода федеральных нормативных актов и/или нормативным требованиям Федерального управления гражданской авиации, аварийно-ударозащищенный запоминающий модуль в соответствии с любым действующим Сводом федеральных нормативных актов, либо любое другое подходящее защищенное запоминающее устройство, известное в данной области техники. В восьмом варианте осуществления, средство записи данных дополнительно может включать в себя необязательное не-аварийно-ударозащищенное съемное устройство хранения данных.
[00178] Проводные и/или беспроводные линии 1070 связи для передачи данных могут включать в себя любое одно либо комбинацию дискретных сигнальных вводов, стандартных или собственных Ethernet-, последовательных соединений и беспроводных соединений. Ethernet-соединенные устройства могут использовать Ethernet-коммутатор 1062 средства 1054 записи данных и могут использовать РОЕ. Ethernet-коммутатор 1062 может быть внутренним или внешним и может поддерживать РОЕ. Дополнительно, данные из удаленных источников данных, таких как картографический компонент 1064, компонент 1024 обработки деклараций по маршрутам / бригадам и погодный компонент 1026 в реализации по фиг. 19, доступны для бортового диспетчера 1020 данных и детектора 1056 событий транспортного средства из центра 1050 данных через беспроводную линию 1046 связи для передачи данных и беспроводной шлюз / маршрутизатор 1072.
[00179] Средство 1054 записи данных собирает данные или информацию из широкого спектра источников, которые могут значительно варьироваться на основе конфигурации объекта, через бортовую линию 1070 связи для передачи данных. Кодер 1022 данных кодирует, по меньшей мере, минимальный набор данных, который типично задается посредством регулирующего органа. В этой реализации, кодер 1022 данных принимает данные из широкого спектра источников в объекте 1048 и источников в центре 1050 данных. Источники информации могут включать в себя любое число компонентов в объекте 1048, к примеру, любое из аналоговых вводов 1002, цифровых вводов 1004, модуля 1006 ввода-вывода, контроллера 1008 транспортного средства, контроллера 1010 двигателя, инерциальных датчиков 1012, глобальной системы 1014 позиционирования (GPS), камер 1016, сигнальных данных 1066 системы точного управления движением железнодорожных составов (РТС), данных 1068 топливной системы, детекторов сотовой передачи (не показаны), внутренне обусловленных данных и любых дополнительных сигналов данных, и любое число компонентов в центре 1050 данных, к примеру, любое из компонента 1024 обработки деклараций по маршрутам / бригадам, погодного компонента 1026, картографического компонента 1064 и любых дополнительных сигналов данных. Кроме того, источники информации в объекте 1048 могут соединяться со средством 1054 записи данных через любую комбинацию проводных или беспроводных линий 1070 связи для передачи данных. Кодер 1022 данных сжимает или кодирует данные и синхронизирует во времени данные, чтобы упрощать эффективную передачу и репликацию в реальном времени в удаленный репозиторий 1030 данных. Кодер 1022 данных передает кодированные данные в бортовой диспетчер 1020 данных, который затем сохраняет кодированные данные в аварийно-ударозащищенном запоминающем модуле 1018 и репозиторий 1058 с постановкой в очередь для репликации в удаленный репозиторий 1030 данных через удаленный диспетчер 1032 данных, расположенный в центре 1050 данных. Необязательно, бортовой диспетчер 1020 данных также может сохранять третичную копию кодированных данных в не-аварийно-ударозащищенном съемном устройстве хранения данных по восьмому варианту осуществления. Бортовой диспетчер 1020 данных и удаленный диспетчер 1032 данных работают согласованно, чтобы управлять процессом репликации данных. Один удаленный диспетчер 1032 данных в центре 1050 данных может управлять репликацией данных из множества объектов 1048.
[00180] Данные из различных компонентов ввода и данные из аудио-/графического пользовательского интерфейса 1060 (GUI) в кабине машиниста отправляются в детектор 1056 событий транспортного средства. Детектор 1056 событий транспортного средства обрабатывает данные, чтобы определять то, возникает либо нет событие, происшествие или другая предварительно заданная ситуация, затрагивающая объект 1048. Когда детектор 1056 событий транспортного средства обнаруживает сигналы, которые указывают, что предварительно заданное событие возникает, детектор 1056 событий транспортного средства отправляет обработанные данные касательно того, что предварительно заданное событие возникает, вместе с подтверждающими данными, сопровождающими предварительно заданное событие, в бортовой диспетчер 1020 данных. Детектор 1056 событий транспортного средства обнаруживает события на основе данных из широкого спектра источников, таких как аналоговые вводы 1002, цифровые вводы 1004, модуль 1006 ввода-вывода, контроллер 1008 транспортного средства, контроллер 1010 двигателя, инерциальные датчики 1012, GPS 1014, камеры 1016, компонент 1024 обработки деклараций по маршрутам / бригадам, погодный компонент 1026, картографический компонент 1064, сигнальные РТС-данные 1066 и данные 1068 топливной системы, которые могут варьироваться на основе конфигурации объекта. Когда детектор 1056 событий транспортного средства обнаруживает событие, обнаруженная информация событий объектов сохраняется в репозиторий 1058 с постановкой в очередь и необязательно может представляться бригаде объекта 1048 через аудио-/графический пользовательский интерфейс 1060 (GUI) в кабине машиниста.
[00181] Когда местоположение объекта 1048 указывает, что сигнал 1082 пересечен, чрезмерное торможение возникает, и объект 1048 остановлен очень близко от сигнала 1082, либо ограничения скорости применены посредством показания сигнала, бортовой диспетчер 1020 данных должен инициировать анализ изображений обращенных наружу камер, чтобы определять смысловое значение или показание сигнала 1082, как показано на фиг. 20. С использованием технологий обработки изображений предшествующего уровня техники, видеозапись с помощью обращенных наружу камер может анализироваться посредством предварительно обученной нейронной сети или компонента искусственного интеллекта, чтобы расшифровывать показание сигнала и последствия применения правил эксплуатации. Анализ и/или обработка посредством компонента на основе нейронных сетей или искусственного интеллекта, в этой примерной реализации, выполняется в бэк-офисе. В другом варианте осуществления, анализ и/или обработка посредством компонента на основе нейронных сетей или искусственного интеллекта выполняется в объекте 1048. Вывод декодирования показаний сигналов комбинируется с другими данными датчиков, чтобы определять то, нарушает или нет объект 1048 грубо индикатор сигнала светофора посредством занятия железнодорожных путей, в этой примерной реализации, что может приводить к лобовому столкновению железнодорожных составов, или работает небезопасным способом, чтобы достигать соответствия требованиям сигналов. Когда обнаруживается, что объект 1048 не соответствует требованиям, электронное аварийное оповещение должно сохраняться в бэк-офисе, а также доставляться пользователям, которые подписываются на, чтобы принимать такие аварийные оповещения, после ассоциирования бизнес-правил железной дороги с операциями сигналов и объектов. Эти аварийные оповещения затем могут добываться либо непосредственно через базу данных, либо посредством использования графического пользовательского интерфейса веб-узла или веб-клиента 1042, предоставленного пользователям.
[00182] Дополнительно, в кабину машиниста объекта 1048 может добавляться слышимое аварийное оповещение, которое должно выдавать аварийное оповещение бригаде относительно надвигающегося нарушения запрещающего сигнала, надвигающейся плохой ситуации, на которую бригада может реагировать быстрее в случае, если бригада отвлекается или в силу иных причин не обращает внимания на преграду на пути, стоп-сигнал, и/или если объект 1048 ускоряется в зоне, в которой сигнал требует более низкого ограничения скорости.
[00183] Система 1080 автоматизированного мониторинга сигналов и выдачи аварийных оповещений также улучшается с возможностью автоматически выполнять видеоаналитику, чтобы определять смысловое значение сигнала каждый раз, когда отслеживаемый объект пересекает сигнал, с возможностью автоматически выполнять видеоаналитику, чтобы определять смысловое значение сигнала каждый раз, когда объект подвергается чрезмерным тормозным силам и останавливается в пределах предварительно заданного расстояния, и с возможностью отслеживать скорость объекта, чтобы определять то, движется или нет объект на скорости, превышающей авторизованную, что определено посредством показания сигнала. Аналитика по изображениям выполняется на борту объекта 1048, чтобы уменьшать задержку между фактическим событием и электронным уведомлением пользователям и/или абонентам. Функциональность системы 1080 автоматизированного мониторинга сигналов и выдачи аварийных оповещений улучшается с возможностью обеспечивать возможность автоматизированных загрузок обращенного внутрь и наружу видео во время аварийного оповещения, чтобы улучшать пользовательское восприятие и снижать объем работ, необходимый, чтобы расследовать событие. Функциональность системы 1080 автоматизированного мониторинга сигналов и выдачи аварийных оповещений также улучшается с возможностью предоставлять слышимые сигнальные метки в реальном времени в не соответствующем требованиям объекте 1048, чтобы выдавать аварийные оповещения бригаде в случае отвлечения или другой причины отступления от следования практике безопасной эксплуатации относительно правил применения и смыслового значения сигналов.
[00184] Дополнительно, система 1080 автоматизированного мониторинга сигналов и выдачи аварийных оповещений и/или система 910 видеоаналитики могут принимать информацию местоположения, включающую в себя координаты по широте и по долготе сигнала, такого как стоп-сигнал, сигнал светофора, сигнал ограничения скорости и/или сигнал субъекта около путей, от владельца объектов. Система 910 видеоаналитики затем определяет то, является или нет информация местоположения, принимаемая от владельца объектов, корректной. Если информация местоположения является корректной, система 910 видеоаналитики сохраняет информацию и не должна повторно проверять информацию местоположения снова в течение предварительно определенного количества времени, к примеру, выполнять проверку информации местоположения на ежемесячной основе. Если информация местоположения не является корректной, система 910 видеоаналитики определяет корректную информацию местоположения и сообщает корректную информацию местоположения владельцам объектов, сохраняет информацию местоположения и не должна повторно проверять информацию местоположения снова в течение предварительно определенного количества времени, к примеру, выполнять проверку информации местоположения на ежемесячной основе. Сохранение информации местоположения предоставляет более простое обнаружение сигнала, такого как стоповый сигнал, сигнал светофора, сигнал ограничения скорости и/или сигнал субъекта около путей.
[00185] Бортовой диспетчер 1020 данных также отправляет данные в репозиторий 1058 с постановкой в очередь. В режиме почти реального времени, бортовой диспетчер 1020 данных сохраняет кодированные данные, принимаемые из кодера 1022 данных, и любую информацию событий в аварийно-ударозащищенном запоминающем модуле 1018 и в репозиторий 1058 с постановкой в очередь. В восьмом варианте осуществления, бортовой диспетчер 1020 данных необязательно также может сохранять кодированные данные в не-аварийно-ударозащищенном съемном устройстве хранения данных по восьмому варианту осуществления. После того, как пять минут кодированных данных накоплены в репозиторий 1058 с постановкой в очередь, бортовой диспетчер 1020 данных сохраняет пять минут кодированных данных в удаленный репозиторий 1030 данных через удаленный диспетчер 1032 данных в центре 1050 данных по беспроводной линии 1046 связи для передачи данных, доступной через беспроводной шлюз / маршрутизатор 1072. В режиме реального времени, бортовой диспетчер 1020 данных сохраняет кодированные данные, принимаемые из кодера 1022 данных, и любую информацию событий в аварийно-ударозащищенном запоминающем модуле 1018 и необязательно в не-аварийно-ударозащищенном съемном устройстве хранения данных по восьмому варианту осуществления и в удаленном репозиторий 1030 данных через удаленный диспетчер 1032 данных в центре 1050 данных по беспроводной линии 1046 связи для передачи данных, доступной через беспроводной шлюз / маршрутизатор 1072. Процесс репликации данных в удаленный репозиторий 1030 данных требует беспроводного соединения для передачи данных между объектом 1048 и центром 1050 данных. Бортовой диспетчер 1020 данных и удаленный диспетчер 1032 данных могут обмениваться данными по множеству линий беспроводной связи, к примеру, по Wi-Fi-, сотовым, спутниковым и частным беспроводным системам, с использованием беспроводного шлюза / маршрутизатора 1072. Беспроводная линия 1046 связи для передачи данных, например, может представлять собой беспроводную локальную вычислительную сеть (WLAN), беспроводную общегородскую вычислительную сеть (WMAN), беспроводную глобальную вычислительную сеть (WWAN), частную беспроводную систему, сотовую телефонную сеть либо любое другое средство передачи данных из средства 1054 записи данных DARS 1000, в этом примере, в удаленный диспетчер 1030 данных DARS 1000. Когда беспроводное соединение для передачи данных не доступно, данные сохраняются в запоминающем устройстве и ставятся в очередь в репозиторий 1058 с постановкой в очередь до тех пор, пока беспроводное подключение не восстанавливается, и процесс репликации данных может возобновляться.
[00186] Параллельно с записью данных, средство 1054 записи данных непрерывно и автономно реплицирует данные в удаленный репозиторий 1030 данных. Процесс репликации имеет два режима, режим реального времени и режим почти реального времени. В режиме реального времени, данные реплицируются в удаленный репозиторий данных 1030 каждую секунду. В режиме почти реального времени, данные реплицируются в удаленный репозиторий 1030 данных каждые пять минут. Частоты, используемые для режима почти реального времени и режима реального времени, являются конфигурируемыми, и частота, используемая для режима реального времени, может регулироваться, чтобы поддерживать данные высокого разрешения посредством репликации данных в удаленный репозиторий 1030 данных каждые 0,10 секунды. Когда DARS 1000 находится в режиме почти реального времени, бортовой диспетчер 1020 данных ставит данные в очередь в репозиторий 1058 с постановкой в очередь до репликации данных в удаленный диспетчер 1032 данных. Бортовой диспетчер 1020 данных также реплицирует информацию детектора событий транспортного средства, поставленную в очередь в репозиторий 1058 с постановкой в очередь, в удаленный диспетчер 1032 данных. Режим почти реального времени используется в нормальном режиме работы, при большинстве условий, чтобы повышать эффективность процесса репликации данных.
[00187] Режим реального времени может инициироваться на основе событий, возникающих и обнаруженных посредством детектора 1056 событий транспортного средства на борту объекта 1048, либо посредством запроса, инициированного из центра 1050 данных. Типичный инициированный центром 1050 данных запрос на режим реального времени инициируется, когда удаленно расположенный пользователь 1052 запрашивает информацию в реальном времени из веб-клиента 1042. Типичная причина того, что режим реального времени берет начало на борту объекта 1048, заключается в обнаружении события или происшествия, такого как инициирование, машинистом, запроса на экстренную остановку, активность по экстренному торможению, быстрое ускорение или замедление по любой оси или потеря входной мощности в средство 1054 записи данных. При переходе из режима почти реального времени в режим реального времени, все данные, еще не реплицированные в удаленный репозиторий 1030 данных, реплицируются и сохраняются в удаленном репозиторий 1030 данных, и после этого репликация вживую инициируется. Переход между режимом почти реального времени и режимом реального времени типично возникает менее чем за пять секунд. После того, как предварительно определенное количество времени прошло с момента события или происшествия, после предварительно определенного количества времени неактивности, либо когда пользователю 1052 более не требуется информация в реальном времени из объекта 1048, средство 1054 записи данных возвращается в режим почти реального времени. Предварительно определенное количество времени, требуемое, чтобы инициировать переход, является конфигурируемым и типично задается равным десяти минутам.
[00188] Когда средство 1054 записи данных находится в режиме реального времени, бортовой диспетчер 1020 данных пытается непрерывно опустошать свою очередь в удаленный диспетчер 1032 данных, сохраняя данные в аварийно-ударозащищенный запоминающий модуль 1018 и необязательно в не-авариино-ударозащищенное съемное устройство хранения данных по восьмому варианту осуществления и отправляя данные в удаленный диспетчер 1032 данных одновременно. Бортовой диспетчер 1020 данных также отправляет обнаруженную информацию транспортного средства, поставленную в очередь в репозиторий 1058 с постановкой в очередь в удаленный диспетчер 1032 данных.
[00189] При приеме данных, которые должны реплицироваться, из средства 1054 записи данных, вместе с данными из картографического компонента 1064, компонента 1024 обработки деклараций по маршрутам / бригадам и погодного компонента 1026, удаленный диспетчер 1032 данных сохраняет сжатые данные в удаленный репозиторий 1030 данных в центре 1050 данных DARS 1000. Удаленный репозиторий 1030 данных, например, может представлять собой облачное хранилище данных либо любое другое подходящее удаленное хранилище данных. Когда данные принимаются, инициируется процесс, который инструктирует декодеру 1036 данных декодировать последние реплицированные данные для/из удаленного репозитория 1030 данных и отправлять декодированные данные в удаленный детектор 1034 событий. Удаленный диспетчер 1032 данных сохраняет информацию событий транспортного средства в удаленном репозиторий 1030 данных. Когда удаленный детектор 1034 234 событий принимает декодированные данные, он обрабатывает декодированные данные, чтобы определять то, обнаружено или нет интересующее событие в декодированных данных. Декодированная информация затем используется посредством удаленного детектора 1034 событий, чтобы обнаруживать события, происшествия или другие предварительно заданные ситуации, в данных, возникающих с объектом 1048. При обнаружении интересующего события из декодированных данных, удаленный детектор 1034 событий сохраняет информацию событий и подтверждающие данные в удаленном репозиторий 1030 данных. Когда удаленный диспетчер 1032 данных принимает информацию удаленного детектора 1034 событий, удаленный диспетчер 1032 данных сохраняет информацию в удаленном репозиторий 1030 данных.
[00190] Удаленно расположенный пользователь 1052 может осуществлять доступ к информации, включающей в себя информацию детектора событий транспортного средства, связанную с конкретным объектом 1048 или с множеством объектов, с использованием стандартного веб-клиента 1042, такого как веб-браузер или устройство в стиле виртуальной реальности (не показано), которое, в этой реализации, может отображать миниатюрные изображения из выбранных камер. Веб-клиент 1042 передает запрос пользователя 1052 на предмет информации на веб-сервер 1040 через сеть 1044 с использованием общих веб-стандартов, протоколов и технологий. Сеть 1044, например, может представлять собой Интернет. Сеть 1044 также может представлять собой локальную вычислительную сеть (LAN), общегородскую вычислительную сеть (MAN), глобальную вычислительную сеть (WAN), виртуальную частную сеть (VPN), сотовую телефонную сеть либо любое другое средство передачи данных из веб-сервера 1040, в этом примере, в веб-клиент 1042. Веб-сервер 1040 запрашивает требуемые данные из декодера 1036 данных. Декодер 1036 данных получает запрашиваемые данные, связанные с конкретным объектом 1048 или с множеством объектов, из удаленного репозитория 1030 данных при запросе из веб-сервера 1040. Декодер 1036 данных декодирует запрашиваемые данные и отправляет декодированные данные в локализатор 1038. Локализация представляет собой процесс преобразования данных в форматы, требуемые конечным пользователем, к примеру, преобразования данных в предпочтительный язык и единицы измерения пользователя. Локализатор 1038 идентифицирует настройки профиля, заданные пользователем 1052, посредством осуществления доступа к веб-клиенту 1042, и использует настройки профиля, чтобы подготавливать информацию, отправляемую в веб-клиент 1042 для представления пользователю 1052, в качестве необработанных кодированных данных, и обнаруженная информация событий сохраняется в удаленный репозиторий 1030 данных с использованием всемирного координированного времени (UTC) и международной системы единиц (единиц СИ). Локализатор 1038 преобразует декодированные данные в формат, требуемый пользователем 1052, такой как предпочтительный язык и единица измерения пользователя 1052. Локализатор 1038 отправляет локализованные данные в предпочтительном формате пользователя 1052 на веб-сервер 1040 по запросу. Веб-сервер 1040 затем отправляет локализованные данные объекта или множества объектов в веб-клиент 1042 для просмотра и анализа, предоставляя воспроизведение и отображение в реальном времени стандартного видео, видео с обзором в 360 градусов и/или другого видео. Веб-клиент 1042 может отображать, и пользователь 1052 может просматривать данные, видео и аудио для одного объекта или одновременно просматривать данные, видео и аудио для множества объектов. Веб-клиент 1042 также может предоставлять синхронное воспроизведение и отображение в реальном времени данных вместе с множеством видео- и аудиоданных из источников измерения изображений, стандартных видеоисточников, видеоисточников с обзором в 360 градусов и/или других видеоисточников и/или источников измерения дальности, на, в или около объекта, близлежащих объектов и/или удаленно расположенных площадок.
[00191] Фиг. 21 является блок-схемой последовательности операций способа, показывающей первый проиллюстрированный вариант осуществления процесса 1100 для определения соответствия требованиям сигналов в соответствии с реализацией этого раскрытия. После того, как DARS 1000 и камеры 1016 устанавливаются и соединяются с различными датчиками на объекте 1048, такими как аналоговые вводы 1002, цифровые вводы 1004, модуль 1006 ввода-вывода, контроллер 1008 транспортного средства, контроллер 1010 двигателя, инерциальные датчики 1012, глобальная система 1014 позиционирования (GPS), камеры 1016, сигнальные данные 1066 системы точного управления движением железнодорожных составов (РТС), данные 1068 топливной системы, детекторы сотовой передачи (не показаны), внутренне обусловленные данные и любые дополнительные сигналы данных (1102), бортовые данные из различных датчиков и/или инициируемые по событию видео или неподвижные изображения отправляются в центр 1074 данных бэк-офиса каждые пять минут, и изображения с камер сохраняются на борту объекта 1048 за последние 72 часа (1104). Услуга центра 1074 данных бэк-офиса непрерывно сканирует данные на предмет инициирующих условий (1106). Если условия инициирования бизнес-логики на основе эпизодов не удовлетворяются, последовательность действий подавляется, и событие в виде эпизода не регистрируется (1108). Если объект 1048 движется мимо путевого сигнала 1082, указанного посредством координат по широте и по долготе всех сигналов, сохраненных в центре 1074 данных бэк-офиса (1110), и/или объект 1048 останавливается в пределах определенного расстояния перед сигналом 1082 и использует чрезмерную тормозную силу, чтобы разрешать остановку до прохождения мимо сигнала 1082 (1112), услуга центра 1074 данных бэк-офиса сканирует данные, чтобы определять то, находится или нет вагон железнодорожного состава, в этом проиллюстрированном варианте осуществления, в головной, управляющей или первой позиции в объекте-железнодорожном составе 1048 (1114). Центр 1074 данных бэк-офиса использует первую модель на основе искусственного интеллекта, чтобы определять то, находится или нет вагон железнодорожного состава в головной, управляющей или первой позиции в объекте-железнодорожном составе 1048 (1116). Если вагон железнодорожного состава не находится в головной, управляющей или первой позиции в объекте-железнодорожном составе 1048, условия инициирования бизнес-логики на основе эпизодов не удовлетворяются, последовательность действий подавляется, и событие в виде эпизода не регистрируется (1108). Если вагон железнодорожного состава находится в головной, управляющей или первой позиции в объекте-железнодорожном составе 1048, центр 1074 данных бэк-офиса запрашивает видеоконтент из локомотива в головной, управляющей или первой позиции, снятый за короткий период времени до переезда сигнала 1082 и/или во время остановки объекта 1048 (1118). Извлеченный видеоконтент передается и/или сохраняется в центре 1074 данных бэк-офиса и передается далее во вторую модель на основе искусственного интеллекта, которая сканирует видеоконтент, чтобы определять показание сигнала 1082, такое как комбинация цветов каждого сигнального фонаря, чтобы определять то, указывает или нет сигнал 1082 смысловое значение "стоп" (1120). Центр 1074 данных бэк-офиса определяет то, указывает или нет показание сигнала 1082, что объект 1048 должен останавливаться и не может проходить через сигнал 1082 (1122). Если показание сигнала 1082 не указывает, что объект 1048 должен останавливаться и не может проходить через сигнал 1082, условия инициирования бизнес-логики на основе эпизодов не удовлетворяются, последовательность действий подавляется, и событие в виде эпизода не регистрируется (1108). Если показание сигнала 1082 указывает, что объект 1048 должен останавливаться и не может проходить через сигнал 1082, и стоп-сигнал присутствует, эпизод инициируется, сохраняется в базе данных центра 1074 данных бэк-офиса, и почтовые сообщения отправляются пользователям, которые заранее выбирают уведомление в отношении того, когда такие условия существуют (1124).
[00192] Для простоты пояснения, процесс 1100 иллюстрируется и описывается в качестве последовательности этапов. Тем не менее, этапы в соответствии с этим раскрытием могут осуществляться в других порядках и/или параллельно. Дополнительно, этапы в соответствии с этим раскрытием могут осуществляться с другими этапами, не представленными и описанными в данном документе. Более того, не все проиллюстрированные этапы могут требоваться, чтобы реализовывать технологии в соответствии с заявленным предметом изобретения.
[00193] Соединенная система диагностики, описанная в данном документе, используемая с системой получения и записи данных в реальном времени, такой как DARS 100, 200, 1000, как показано на фиг. 1, 2 и 20, соответственно, предоставляет доступ в режиме реального времени к широкому диапазону данных, таких как данные событий и рабочие данные, видеоданные и аудиоданные, связанные с особо важным объектом, и предоставляет восприятие "в кабине машиниста" особо важного объекта для удаленно расположенных пользователей, таких как владельцы объектов, машинисты, специалисты по техническому обслуживанию, супервайзеры, центры управления и расследователи. Соединенная система диагностики минимизирует количество времени и усилия, требуемые посредством персонала, чтобы выполнять свои ежедневные операции и техобслуживание объектов. Соединенная система диагностики предоставляет множество виртуальных удаленных экземпляров дисплеев машиниста или бортовых дисплеев и/или человеко-машинных интерфейсов (HMI), к которым может осуществляться доступ на множестве устройств в любом месте в мире. Различные пользователи должны извлекать выгоду из соединенной системы диагностики настоящего раскрытия, такие как машинисты, специалисты по техническому обслуживанию, центры управления и супервайзеры. Машинисты работают на борту объекта и отвечают за работу с объектом и обеспечение безопасности пассажиров или товаров, которые перевозит объект. Специалисты по техническому обслуживанию отвечают за ремонт и техобслуживание оборудования и механизмов объекта обычно тогда, когда объект является стационарным в станции или депо, и потенциально могут диспетчеризироваться в магистраль на то, с чтобы выполнять поиск и устранение неисправностей после дорожных происшествий. Супервайзеры отвечают за наблюдение за управлением и обслуживанием объектов. Центр управления представляет собой концентратор для ретрансляции информации машинистам, помогая им выполнять поиск и устранение любых проблем на объекте и работать в тесном сотрудничестве с супервайзерами и специалистами по техническому обслуживанию. Центр управления также предоставляет информацию относительно ежедневных операций объекта, к примеру, информацию маршрутов, информацию станции, действия при аварийных ситуациях с пассажирами и т.д.
[00194] До соединенной системы диагностики настоящего раскрытия, существующие системы, такие как, например, система мониторинга и диагностики (MDS; фиг. 23В), установленные на подвижных объектах, таких как, например, вагон железнодорожного состава (фиг. 23А), включали в себя бортовой блок обработки, который собирает данные из объекта, систем и/или устройств на борту объекта и ретранслирует информацию в бортовые дисплеи, такие как, например, дисплей машиниста железнодорожного состава (TOD; фиг. 23С) и/или человеко-машинные интерфейсы (HMI). Как показано на фиг. 23А компоненты вагона железнодорожного состава, включающие в себя TOD, MDS, систему обогрева, вентиляции и кондиционирования воздуха (HVAC), тормоза, двери, силовую установку, систему со средством записи событий (ERS) и систему обработки информации пассажиров (PIS), соединяются между собой через шину транспортного средства, которая показывается синими линиями. Как показано на фиг. 23D эта информация доступна для каждого транспортного средства и соответствующего вагонного состава в целом. В настоящее время, с использованием существующих систем предшествующего уровня техники, удаленные пользователи не на борту транспортного средства, например, центр управления, супервайзеры, персонал по техническому обслуживанию и т.д., не имеют доступа к данным и/или информации на борту транспортного средства в реальном времени. Машинист на транспортном средстве должен ретранслировать информацию через каналы связи, такие как радиостанции или подвижные телефоны, чтобы контактировать с внебортовыми пользователями, что должно проводиться для каждого транспортного средства отдельно. Информация, которую ретранслирует машинист, может представлять собой информацию транспортного средства или информацию состава. Машинист не имеет возможности осуществлять доступ и/или ретранслировать информацию для всего парка. Система настоящего раскрытия уменьшает необходимость для машинистов ретранслировать информацию, только в специализированных сценариях, через каналы связи, позволяя удаленно расположенным пользователям осуществлять доступ к данным и/или информации из любого объекта с использованием любого удаленного устройства, такого как подвижные телефоны, переносные компьютеры, планшетные компьютеры и/или любое устройство с совместимой возможностью подключения, из любого места в мире.
[00195] Соединенная система диагностики настоящего раскрытия предоставляет несколько выгод по сравнению с существующими системами мониторинга и диагностики предшествующего уровня техники. А именно, соединенная система диагностики настоящего раскрытия обеспечивает возможность центрам управления и бригадам техобслуживания базироваться на удаленных видах бортовых рабочих дисплеев и/или человеко-машинных интерфейсов (HMI) и информации веб-узла заявителя, предоставляет доступ ко множеству объектов и/или вагонных составов одновременно, обеспечивает возможность для хронологических данных сохраняться в облаке и быть доступными в течение многих лет, предоставляет каждому объекту портативный бортовой дисплей и/или HMI, поддерживает программное обеспечение на бортовых рабочих дисплеях и/или HMI актуальным за счет новейших технологий с обновлениями по радиоинтерфейсу, выполняет удаленную диагностику, хранит руководства и журналы учета ремонтных работ, предоставляет информацию назначения маршрутов и бригад объектов и/или железнодорожных составов и обеспечивает возможность передачи аварийных оповещений и предупреждений во внебортовом направлении.
[00196] Соединенная система диагностики также предоставляет удаленный доступ к бортовому дисплею и/или HMI на объекте. Посредством связи с помощью интерфейса с бортовыми устройствами на объекте и создания виртуального восприятия "в кабине машиниста", соединенная система диагностики создает удаленный вид или удаленный экземпляр бортового дисплея и/или HMI для удаленно расположенных конечных пользователей, который является точно таким же, как показано на объекте. Удаленно расположенный конечный пользователь может просматривать бортовой дисплей и/или HMI через удаленный экземпляр на своем удаленном устройстве и также может осуществлять навигацию на экраны, отличающиеся от экрана, который отображается в данный момент на бортовом дисплее и/или HMI, который просматривает машинист. Система настоящего раскрытия обеспечивает возможность просмотра передаваемых вживую данных и хронологических данных на борту объекта и не на борту объекта для всего парка, предоставляя возможность расстыковывать бортовой дисплей и/или HMI, чтобы предоставлять портативность, за счет этого обеспечивая для пользователя возможность выполнять поиск и устранение проблем на объекте; предоставления одновременного визуального и слышимого индикатора событий на борту объекта и не на борту объекта удаленно расположенным конечным пользователям; предоставление обработки на естественном языке; предоставления пользователю возможности выполнять удаленные самотестирования, подтверждение отказов и другие связанные с техническим обслуживанием функции, такие как предоставление информационных данных отказов согласно местоположению, которые не являются доступными для машиниста; предоставления возможности маршрутизировать вид в реальном времени назначенного маршрута, объекта, бригады объекта и т.д., из бэк-офисных систем в объект автоматически, за счет этого уменьшая потребность в записи бригады вручную маршрута объекта; предоставления возможности интеграции с внебортовыми системами управления техническим обслуживанием из бортового дисплея и/или HMI на объекте и предоставления удаленных обновлений до технологии любых бортовых дисплеев и/или HMI, любых бортовых устройств, соединенных с соединенной системой диагностики, и/или любого элемента, соединенного с соединенной системой диагностики через обновления программного обеспечения по радиоинтерфейсу непрерывно в течение всего жизненного цикла объекта.
[00197] Удаленно расположенный пользователь, такой как владелец объектов, машинист, супервайзер, бригада техобслуживания, центр управления и/или расследователь, например, может осуществлять доступ к общему веб-браузеру, чтобы осуществлять навигацию к передаваемым вживую и/или хронологическим требуемым данным, связанным с выбранным объектом, чтобы просматривать и анализировать данные, информацию, эффективность и/или безопасность работы объектов в реальном времени. Способность просматривать операции в реальном времени обеспечивает быструю оценку и регулирование поведения. В ходе происшествия, например, информация и/или данные в реальном времени могут упрощать сортировку ситуации и предоставлять ценную информацию сотрудникам аварийных служб. В нормальном режиме работы, например, информация и/или данные в реальном времени может использоваться, чтобы проводить аудит эффективности работы бригады, помогать машинистам и бригадам техобслуживания в поиске и устранении неисправностей, ремонте и/или техобслуживании объектов и способствовать общесетевой ситуативной осведомленности.
[00198] Данные могут включать в себя, но не только, аналоговые и частотные параметры, такие как скорость, давление, температура, ток, напряжение и ускорение, которые исходят из объекта и/или близлежащих объектов; булевы данные, такие как позиции стрелок, позиция актуатора, предупредительная световая сигнализация и команды управления актуатором; данные глобальной системы позиционирования (GPS) и/или данные географической информационной системы (GIS), такие как позиция, скорость и высота над уровнем моря; внутренне сформированную информацию, такую как нормативное ограничение скорости для объекта с учетом его текущей позиции, видеоинформацию и информацию изображений из камер, расположенных в различных местоположениях в, на или около объекта; аудиоинформацию из микрофонов, расположенных в различных местоположениях в, на или около объекта; информацию относительно оперативного плана для объекта, который отправляется в объект из центра данных, такую как информация маршрутов, расписаний и грузовых деклараций; информацию относительно окружающих условий, включающих в себя текущие и спрогнозированные погодные условия для области, в которой объект в данный момент работает или планируется для работы; данные состояния и рабочие данные управления объектами, сформированные посредством таких систем, как система точного управления движением железнодорожных составов (РТС) в локомотивах; и данные, извлекаемые из комбинации из любого вышеуказанного, включающие в себя, но не только, дополнительные данные, видео- и аудиоанализ и аналитику.
[00199] Фиг. 24 иллюстрирует полевую реализацию первого варианта осуществления примерной соединенной системы 1200 диагностики, в которой могут реализовываться аспекты раскрытия. Соединенная система 1200 диагностики доставляет информацию в реальном времени в центр 1212 управления и удаленно расположенным конечным пользователям 1214, по меньшей мере, из одного источника данных на борту подвижного объекта, такого как устройство записи данных DARS 100, 200 и 1000 и/или по меньшей мере одного источника данных, удаленного от подвижного объекта, такого как удаленный репозиторий данных DARS 100, 200 и 1000, и предоставляет данные и/или информацию объекта 1202 всем пользователям одновременно, при этом все пользователи могут взаимодействовать с данными из объекта на борту одновременно. Соединенная система 1200 диагностики содержит удаленную веб-платформу 1208, которая отображает удаленный экземпляр 1206 бортового дисплея и/или HMI 1210 подвижного объекта 1202, бортовой блок 1216 обработки, такой как DARS 100, 200, 1000, устройство 1240 ввода-вывода и антенну 1238. Бортовой дисплей и/или HMI 1210 могут представлять собой собственный бортовой дисплей подвижного объекта 1202 и/или HMI, или они может включаться с соединенной системой 1200 диагностики и устанавливаться на подвижном объекте 1202. Соединенной системе 1200 диагностики также требуется доступ к передающему модему. Передающий модем может представлять собой собственный передающий модем объекта 1202, или он может содержать соединенную систему 1200 диагностики. К данным, доступным и/или принимаемым через бортовой дисплей 1210 реального времени и удаленно в реальном времени посредством удаленного устройства, осуществляется доступ, по меньшей мере, из одного источника данных на борту подвижного объекта, такого как устройство записи данных DARS 100, 200 и 1000 и по меньшей мере одного источника данных, удаленного от подвижного объекта, такого как удаленный репозиторий данных DARS, 100, 200, 1000. В этом проиллюстрированном варианте осуществления, данные собираются через средство 154, 254, 1054 записи данных DARS 100, 200, 1000, соответственно, передаются в беспроводном режиме в облако через беспроводные линии 146, 246, 1046 связи для передачи данных DARS 100, 200, 1000, соответственно, данные сохраняются в удаленном репозиторий 130, 230, 1030 данных DARS 100, 200, 1000, соответственно, и данные декодируются с использованием декодера 136, 236, 1036 данных и локализуются с использованием локализатора 138, 238, 1038 DARS 100, 200, 1000, соответственно, перед отображением на веб-клиенте 142, 242, 1042 через вебсервер 140, 240, 1040 DARS 100, 200, 1000, соответственно, как описано выше. Соединенная система 1200 диагностики также использует аудио-/GUI 160, 260, 1060 в кабине машиниста DARS 100, 200, 1000, соответственно, чтобы отображать данные, использует удаленный диспетчер 132, 232, 1032 данных DARS 100, 200, 1000, соответственно, , чтобы управлять данными, принимаемыми из соединенной системы 1200 диагностики, и тестирует данные с использованием бортового блока 1216 обработки и/или удаленного детектора 134, 234, 1034 событий DARS 100, 200, 1000, соответственно, чтобы искать предварительно определенные события, эпизоды и/или происшествия. Каждый объект 1202 включает в себя соединенную систему 1200 диагностики и DARS 100, 200 или 1000. Бортовые данные из каждого объекта 1202 отправляются в облачную платформу 1204, и к ним может осуществляться посредством множеством пользователей на множестве устройств в любом местоположении во всем мире. Соединенная система 1200 диагностики настоящего раскрытия предоставляет портативность, которая может использоваться посредством бригады техобслуживания для поиска и устранения неисправностей объектов и разрешает доступ к нескольким экземплярам 1206 данных и/или информации объекта 1202 на удаленных устройствах с использованием удаленной веб-платформы 1208. К нескольким экземплярам 1206 идентичного бортового дисплея и/или HMI 1210 объекта 1202 может осуществляться доступ несколькими пользователями, и наоборот. Любой удаленный экземпляр 1206 бортового дисплея и/или HMI 1210 может быть из любого объекта 1202 в парке, и доступ пользователями к нему может осуществляться только при аутентификации и авторизации. Необязательная радиосвязь также доступна, чтобы бортовая бригада контактировала с центром 1212 управления и специалистами по техническому обслуживанию.
[00200] Различные технологии в соединенной системе 1200 диагностики предоставляют бортовой блок 1216 обработки, такой как DARS 100, 200, 1000, который служит в качестве централизованного местоположения для обмена данными между отдельными системами на объекте 1202 через несколько интерфейсов и/или каналов связи. Соединенная система 1200 диагностики соединяется с удаленной веб-платформой 1208 и/или с бортовым дисплеем и/или HMI 1210, и/или с множеством бортовых дисплеев и/или HMI 1210, которые предоставляют возможность поиска и устранения неисправностей для персонала посредством предоставления предлагаемых корректирующих действий. Текущая компоновка соединенной системы 1200 диагностики выступает в качестве источника, чтобы собирать, обрабатывать и сообщать информацию и/или данные в удаленную веб-платформу 1208 и/или бортовые дисплеи и/или HMI 1210 относительно состояния систем объектов 1202. Бортовые компоненты, с которыми соединяется бортовой блок 1216 обработки, включают в себя, но не только, средства записи событий, такие как источники информации и средство 154, 254, 1054 записи данных DARS 100, 200, 1000, соответственно; дисплеи; спидометры; системы управления; системы связи и обработки информации пассажиров; систему аварийных оповещений при движении транспортного средства; систему обогрева, вентиляции и кондиционирования воздуха (HVAC); тормозные системы; системы дверей; системы подачи мощности для вспомогательного оборудования (APS); и автоматизированный счетчик пассажиров (АРС).
[00201] Ссылаясь на фиг. 25А и 25В, соединенная система 1200 диагностики может включать в себя бортовые дисплеи и/или HMI 1210 (фиг. 27А и 27В), установленные на множестве транспортных средств или подвижных объектов 1202 и соединенные одновременно, которые выступают в качестве интеллектуальной приборной панели, чтобы предоставлять информацию удаленно расположенным конечным пользователям 1214 через бортовой блок 1214 обработки, который передает в потоковом режиме данные удаленно расположенным конечным пользователям в то время, когда объекты 1202 являются стационарными или находятся в движении. Удаленная веб-платформа 1208 и/или бортовые дисплеи и/или HMI 1210 соединяются с бортовым блоком 1216 обработки, который собирает и сохраняет информацию, чтобы заполнять удаленный экземпляр 1206 бортовых дисплеев и/или HMI 1210 и/или бортовых дисплеев и/или HMI 1210, таких как, например, дисплей машиниста железнодорожного состава одной проиллюстрированной примерной реализации, показанной на фиг. 31А, который включает в себя информацию, связанную с операциями, загрузками, аварийными оповещениями, топливом, техобслуживанием, техобслуживанием железнодорожного пути (MoW), системным мониторингом, настройками и поддержкой. Бортовой блок 1216 обработки обеспечивает возможность потоковой передачи данных из бортовых устройств 1218 и DARS 100, 200, 1000, например, в облачную платформу 1204, обеспечивает возможность потоковой передачи данных из бортовых устройств 1218 и DARS 100, 200, 1000, например, удаленно расположенным конечным пользователям 1214 и предоставляет доступ к удаленной веб-платформе 1208. Удаленная веб-платформа 1208 предоставляет удаленный просмотр вживую бортового дисплея и/или HMI 1210 объекта 1202, такого как, например, бортовой дисплей машиниста железнодорожного состава по фиг. 27В и удаленный внебортовой дисплей машиниста железнодорожного состава по фиг. 27С. Бортовой дисплей и/или HMI 1210 обеспечивают возможность видимости для событий, таких как отказы, аварийные оповещения, предупреждения и информационные сообщения, которые возникают на борту объекта 1202, и предоставляют рекомендуемые этапы поиска и устранения неисправностей. Удаленно расположенные конечные пользователи 1214 также могут просматривать идентичные данные одновременно в удаленном экземпляре бортового дисплея и/или HMI 1210 с использованием их удаленных устройств, что обеспечивает возможность удаленно расположенным конечным пользователям 1214 просматривать любую информацию и/или данные в отношении того, что происходит на борту объекта 1202, удаленно. HMI доступен на удаленной веб-платформе 1208, а также на бортовом дисплее 1210. Когда множество объектов 1202 соединяются между собой, как показано на фиг. 26А и 26В, несколько бортовых блоков 1216 обработки обмениваются данными со своими соответствующими бортовыми устройствами 1218 и бортовыми дисплеями и/или HMI 1210, чтобы отправлять данные в облачную платформу 1204. Эти данные просматриваются на удаленной веб-платформе 1208, на которой к нескольким бортовым дисплеям и/или HMI 1210 из каждого из объектов 1202 может осуществляться доступ одновременно.
[00202] Бортовой блок 1216 обработки соединенной системы 1200 диагностики допускает связь с помощью интерфейса с различными каналами связи, которые находятся на борту объекта 1202, не на борту объекта 1202, являются проводными и беспроводными, чтобы предоставлять экземпляр 1206, показывающий удаленный вид 1226 (фиг. 27С) бортового дисплея и/или HMI 1210 (фиг. 25А и 25В), и обеспечивать удаленную видимость бортовых систем, чтобы активировать поиск и устранение неисправностей и диагностику. Проводные и/или беспроводные линии связи для передачи данных бортового блока 1216 обработки могут включать в себя любое одно либо комбинацию дискретных сигнальных вводов и/или выводов и/или аналоговых сигнальных вводов и/или выводов, стандартных или собственных Ethernet-, последовательных соединений и беспроводных соединений. Примеры бортовых каналов 1228 связи с объектами (фиг. 34, 35 и 37) включают в себя, но не только, последовательную связь, контроллерную сеть (CAN), локальную рабочую сеть (LON), Ethernet, многофункциональную шину транспортного средства (MVB) или любое другое средство передачи данных из бортового блока 1214 обработки соединенной системы 1200 диагностики, в этом примере, в бортовые дисплеи и/или HMI 1210. Примеры бортовых каналов 1228 связи с объектами показаны в трех проиллюстрированных примерных реализациях на фиг. 28А, 28В и 28С. Фиг. 28А иллюстрирует вагон 1400 железнодорожного состава, в котором канал связи компонентов (дисплеев 1210 машиниста железнодорожного состава, передающих Ethernet-модемов 1402 и устройства 1240 ввода-вывода), соединенных с бортовым блоком 1216 обработки через Ethernet 1232, показывается желтыми линиями, канал связи компонентов (системы 1406 со средством записи событий (ERS), HVAC 1408, дверей 1410, силовой установки 1412, тормозов 1414 и системы 1416 связи с пассажирами), соединенных с бортовым блоком 1216 обработки через LON-интерфейс 1234, показывается синими линиями, и канал связи компонентов (ERS 1406), соединенных с бортовым блоком 1216 обработки через последовательное соединение 1236, показывается зелеными линиями. Фиг. 28В иллюстрирует вагон 1420 железнодорожного состава, в котором канал связи компонентов (дисплеев 1210 машиниста железнодорожного состава, передающих Ethernet-модемов 1422, АРС 1424, системы 1426 обработки информации пассажиров (PIS), устройства 1428 ввода-вывода, DARS-шлюза 1216 по стандарту Интернета вещей (IoT), камер 1432 контактной сети), соединенных через Ethernet 1232, показывается желтыми линиями, и канал связи компонентов (HVAC 1434, APS 1436, дверей 1438, блока 1440 регулирования тяги, тормозов 1442 и DARS IoT-шлюзов 1216), соединенных через LON-интерфейс 1234, показывается синими линиями. Фиг. 28С иллюстрирует вагон 1450 железнодорожного состава, в котором канал связи компонентов (дисплеев 1210 машиниста железнодорожного состава, передающих Ethernet-модемов 1452, АРС 1454, PIS 1456, устройства 1240 ввода-вывода и DARS-шлюза 1216 по стандарту Интернета вещей (IoT)), соединенных через Ethernet 1232, показывается желтыми линиями, и канал связи компонентов (HVAC 1462, APS 1464, дверей 1466, блока 1468 регулирования тяги, тормозов 1470 и DARS IoT-шлюза 1216), соединенных через LON-интерфейс 1234, показывается синими линиями. Примеры внебортовых каналов 1230 связи с объектами (фиг. 34-37) включают в себя, но не только, Wi-Fi, беспроводную локальную вычислительную сеть (WLAN), беспроводную общегородскую вычислительную сеть (WMAN), беспроводную глобальную вычислительную сеть (WWAN), частную беспроводную систему, сеть спутниковой связи, сотовую телефонную сеть или любое другое средство передачи данных из бортового блока 1216 обработки соединенной системы 1200 диагностики, в этом примере, удаленно расположенным конечным пользователям 1214 (фиг. 24). Примеры внебортовых каналов 1230 связи с объектами показаны в трех проиллюстрированных примерных реализациях на фиг. 28А, 28В и 28С. Фиг. 28А иллюстрирует вагон 1400 железнодорожного состава, в котором канал связи компонентов, а именно, бортового блока 1216 обработки, такого как DARS IoT-шлюз, соединенный через антенну 1238, показывается оранжевыми линиями. Фиг. 28В иллюстрирует вагон 1420 железнодорожного состава, в котором канал связи компонентов, а именно, бортового блока 1216 обработки (DARS IoT-шлюза), соединенного через антенну 1238, показывается оранжевыми линиями. Фиг. 28С иллюстрирует вагон 1450 железнодорожного состава, в котором канал связи компонентов, а именно, бортового блока 1216 обработки (DARS IoT-шлюза), соединенного через антенну 1238, показывается оранжевыми линиями.
[00203] Возможность беспроводного подключения предоставляет информацию относительно местоположения в реальном времени и навигационные данные, что обеспечивает возможность отслеживания объекта 1202 удаленно и предоставляет пользователям точную информацию относительно доступности и услуг. Диагностические журналы из бортового блока 1216 обработки передаются в потоковом режиме немедленно в облачную платформу 1204, и к ним может осуществляться доступ посредством центра 1212 управления для надежного обслуживания. Данные и/или диагностические журналы необязательно сохраняются в интегрированном или автономном аварийно-ударозащищенном запоминающем модуле 1220 (фиг. 25А и 25В) соединенной системы 1200 диагностики и/или в аварийно-ударозащищенном запоминающем модуле 118 DARS 100, в аварийно-ударозащищенном запоминающем модуле 218 DARS 200, необязательно в не-аварийно-ударозащищенном устройстве 219 хранения данных DARS 200 и/или в аварийно-ударозащищенном запоминающем модуле 1018 DARS 1000, в случае происшествия и по-прежнему являются доступными на борту объекта 1202 и/или не на борту объекта 1202. Примерный защищенный запоминающий модуль 1220, например, может представлять собой аварийно-ударопрочный запоминающий модуль средства записи событий, который соответствует нормативным требованиям Федерального управления железных дорог Свода федеральных нормативных актов, выживающий при аварии запоминающий блок, который соответствует требованиям Свода федеральных нормативных актов и/или нормативным требованиям Федерального управления гражданской авиации, аварийно-ударозащищенный запоминающий модуль в соответствии с любыми действующими требованиями Свода федеральных нормативных актов либо любое другое подходящее защищенное запоминающее устройство, известное в данной области техники.
[00204] Бортовой блок 1216 обработки собирает данные из различных устройств, в том числе, но не только, из бортовых устройств 1218 и средства 154, 254, 1054 записи данных DARS 100, 200, 1000, соответственно, и источников информации DARS 100, 200, 1000, которые могут включать в себя любое число компонентов в объекте 148, 248, 1048, к примеру, любое из аналоговых вводов 102, 202, 1002, цифровых вводов 104, 204, 1004, модуля 106, 206, 1006 ввода-вывода, контроллера 108, 208, 1008 транспортного средства, контроллера 110, 210, 1010 двигателя, инерциальных датчиков 112, 212, 1012, глобальной системы 114, 214, 1014 позиционирования (GPS), камер 116, 216, 1016, сигнальных данных 166, 266, 1066 системы точного управления движением железнодорожных составов, данных 168, 268, 1068 топливной системы, детекторов сотовой передачи (не показаны), внутренне обусловленных данных и любых дополнительных сигналов данных, и любое число компонентов в центре 150, 250, 1050 данных, к примеру, любое из компонента 124, 224, 1024 обработки деклараций по маршрутам / бригадам, погодного компонента 126, 226, 1026, картографического компонента 164, 264, 1064 и любых дополнительных сигналов данных, и обеспечивает немедленную доступность данных на облачной платформе 1204 для удаленного мониторинга объектов 1202.
[00205] До соединенной системы 1200 диагностики настоящего раскрытия, существующие системы обеспечивали бортовые или внебортовые виды данных, сформированных посредством бортовых устройств, и, в общем, были ограничены данными только из одного объекта или данных из состава. Фиг. 29 предоставляет понимание последовательности действий при взаимодействии, в существующих системах, между машинистом, центром управления и бригадой техобслуживания. Когда транспортное средство работает, и возникает проблема, машинист, в общем, должен обращаться в центр управления по радиосвязи. Центр управления затем инициирует разговор в обе стороны между машинистом и бригадой техобслуживания на предмет того, чтобы выполнять поиск и устранение проблемы, или диспетчеризировать бригаду на, чтобы дополнительно обеспечивать поиск и устранение неисправностей. Диспетчеризация требуется в случаях, если бригада не имеет возможности помогать в поиске и устранении неисправностей транспортных средств удаленно. Своевременное решение требуется, чтобы уменьшать прерывание предоставления услуг для пассажиров и поддерживать удовлетворенность клиентов.
[00206] Ссылаясь на фиг. 30, который предоставляет вид последовательности действий соединенной системы 1200 диагностики между машинистами 1222, центром 1212 управления и супервайзерами и/или бригадой 1224 техобслуживания, соединенная система 1200 диагностики обеспечивает возможность одновременного удаленного и бортового просмотра данных из бортовых дисплеев и/или HMI 1210 для любого объекта 1202 в парке. Удаленный доступ к данным может просматриваться на множестве устройств, в том числе, но не только, на настольных компьютерах, планшетных компьютерах, подвижных телефонах и/или других карманных устройствах. Супервайзеры, центры управления и другие удаленно расположенные конечные пользователи 1214 могут просматривать дисплей 1210 машиниста (фиг. 28D) удаленно в реальном времени, и соединенная система 1200 диагностики предоставляет удаленно расположенным конечным пользователям 1214 возможность осуществлять навигацию на экраны, отличающиеся от вида на бортовом дисплее и/или HMI 1210 на борту объекта 1202, что создает виртуальное восприятие "в кабине машиниста" и обеспечивает действие в реальном времени, с тем чтобы обеспечивать возможность удаленного управления, поиска и устранения неисправностей и ремонта объекта 1202. Соединенная система 1200 диагностики обеспечивает быстрое решение проблем посредством уменьшения времени, требуемого, чтобы ретранслировать информацию, и минимизирует прерывания предоставления услуг. В некоторых случаях, центр 1212 управления имеет возможность диспетчеризировать бригаду 1224 техобслуживания до того, как машинист 1222 вызывает помощь, поскольку центр 1212 управления имеет доступ ко всей бортовой информации. Бригады 1224 техобслуживания также имеют доступ к той же информации, что и машинист 1222 и центр 1212 управления, что помогает им быстро идентифицировать проблемы и способствует более быстрому решению.
[00207] До соединенной системы 1200 диагностики настоящего раскрытия, существующие системы предоставляли доступ к текущим данным на транспортном средстве для одного устройства или в форме состава. Эти данные доступны только на борту транспортного средства или не на борту транспортного средства.
[00208] Соединенная система 1200 диагностики не ограничена только одним объектом или составом. Соединенная система 1200 диагностики обеспечивает возможность пользователям осуществлять доступ к данным для любого объекта 1202 в парке. С соединенной системой 1200 диагностики, данные доступны одновременно на борту объекта 1202 и не на борту объекта 1202, что обеспечивает возможность супервайзерам и бригадам 1224 техобслуживания сравнивать рабочие характеристики существующего объекта 1202 с проблемами с другим набором объектов в парке, чтобы быстро идентифицировать проблемы и разрешать их.
[00209] До соединенной системы 1200 диагностики настоящего раскрытия, существующие системы предоставляли доступ к данным из бортовых устройств на транспортном средстве только через бортовой дисплей и/или HMI. Эти данные были доступны только на борту транспортного средства или не на борту транспортного средства. Некоторые бортовые устройства существующих систем также имеют ограниченные возможности хранения.
[00210] Соединенная система 1200 диагностики предоставляет доступ к текущим данным и хронологическим данным, полученным из бортовых устройств 1218. Доступ к хронологическим данным является важным, например, посредством предоставления супервайзерам и персоналу по техническому обслуживанию доступа к хронологическим отказам и аварийным оповещениям, чтобы определять тренд в парке или работоспособность объекта, с тем чтобы предоставлять будущие решения по техобслуживанию. С соединенной системой 1200 диагностики, данные доступны одновременно на борту объекта 1202 и не на борту объекта 1202. Соединенная система 1200 диагностики может поддерживать хранение хронологических данных в течение вплоть до 100 дней, в этой проиллюстрированной реализации, что может продлеваться при необходимости на борту объекта 1202. Не на борту объекта 1202, данные могут сохраняться в течение 2 лет, и их хранение также может продлеваться при необходимости.
[00211] До соединенной системы 1200 диагностики настоящего раскрытия, существующие системы включали в себя бортовые дисплеи и/или HMI, которые стационарно закреплялись в панелях управления кабины машиниста транспортного средства. Этот пристыкованный режим стационарных бортовых дисплеев и/или HMI не является применимым для бригады, когда возникают проблемы на транспортном средстве, при которых требуется одновременный просмотр бортового дисплея и/или HMI, чтобы выполнять поиск и устранение неисправностей.
[00212] Соединенная система 1200 диагностики обеспечивает возможность расстыковки бортовых дисплеев и/или HMI 1210, что позволяет пользователям перемещать бортовые дисплеи и/или HMI 1210 в требуемые местоположения по всему объекту 1202, с тем чтобы обеспечивать поиск и устранение неисправностей. Портативность бортовых дисплеев и/или HMI 1210 также обеспечивает возможность пользователям снимать изображения и видео с использованием бортового дисплея и/или HMI 1210, который укомплектовывается встроенной камерой (не показана), чтобы обеспечивать поиск и устранение неисправностей объекта 1202. Например, в существующих системах, когда возникает проблема с системой дверей, бригада техобслуживания должна обходить все полностью, чтобы разрешать проблему между будкой машиниста и дверью. Соединенная система 1200 диагностики обеспечивает возможность бригадам техобслуживания или техническому специалисту 1224 просматривать данные на бортовом дисплее и/или HMI 1210 при выполнении поиска и устранения проблемы в идентичном местоположении, к примеру, в котором расположены двери, за счет этого уменьшая время и усилия, требуемые, чтобы выполнять поиск и устранение неисправностей. Другие примеры включают в себя, но не только, просмотр данных двигателя, выравнивание по уровню легкорельсового транспортного средства (LRV), чтобы регулировать систему подвески таким образом, что она совмещается на платформе, подъем к пантографу, визуальный осмотр согласованно с состоянием на дисплее, автоматизированный контрольный список на дисплее: визуальный осмотр и подтверждение через экран и интегрированную камеру планшетного компьютера для дополненной реальности (AR), что обеспечивает возможность восприятия в стиле дополненной реальности для поиска и устранения неисправностей для таких способов, как точное определение частей, которые сбоят, извещение относительно части, которая ремонтируется, и предоставление тщательного прохождения этапов поиска и устранения неисправностей.
[00213] До соединенной системы 1200 диагностики настоящего раскрытия, существующие системы предоставляли доступ к информации текущей версии программного обеспечения на борту транспортного средства или не на борту транспортного средства для вида в форме одного транспортного средства или состава.
[00214] Соединенная система 1200 диагностики предоставляет доступ к текущей и хронологической информации версии программного обеспечения и датам выпуска всех бортовых устройств 1218. Эти данные доступны одновременно на борту объекта 1202 и не на борту объекта 1202. Соединенная система 1200 диагностики обеспечивает ведение всестороннего учета программного обеспечения, которое обновляется на всех объектах 1202, что является преимущественным во время поиска и устранения неисправностей и обеспечивает возможность железным дорогам, в проиллюстрированной примерной реализации, соответствовать практике эксплуатации и техобслуживания, ведению учета, конфигурационному управлению и администрированию контроля изменений.
[00215] До соединенной системы 1200 диагностики настоящего раскрытия, существующие системы предоставляли визуальные и слышимые уведомления, включающие в себя обработку на естественном языке, только на борту транспортного средства или не на борту транспортного средства, для связанных с транспортным средством событий, в том числе, но не только, аварийных оповещений (например, аварийных ситуаций с пассажирами), задержек, предупреждений относительно неблагоприятной погоды, отказов, сформированных посредством бортовых устройств (например, открытая дверь на маршруте), информационных сообщений и информации маршрутов.
[00216] Соединенная система 1200 диагностики предоставляет одновременные визуальные и слышимые уведомления, включающие в себя обработку на естественном языке, в связанные с объектом события на борту объекта 1202 и не на борту объекта 1202. Эти данные доступны одновременно на борту объекта 1202 и не на борту объекта 1202, обеспечивая возможность удаленно расположенному пользователю просматривать реплику бортовых дисплеев и/или HMI 1210 при одновременном обеспечении возможности удаленно расположенному пользователю осуществлять доступ к информации, которая не отображается в данный момент на бортовых дисплеях и/или HMI 1210, но доступна для бортовых дисплеев и/или HMI 1210. Например, бортовые дисплеи и/или HMI 1210 и удаленный вид 1226 бортовых дисплеев и/или HMI могут отображать идентичный экран, к примеру, рабочий экран 1480 вагона 1400 железнодорожного состава, показанный на фиг. 32А, первый экземпляр экрана 1482 неисправностей вагона 1400 железнодорожного состава, показанный на фиг. 32В, второй экземпляр экрана 1484 неисправностей вагона 1400 железнодорожного состава, показанный на фиг. 32С, экран 1486 доступа для техобслуживания вагона 1420 железнодорожного состава, показанный на фиг. 32D, экран 1488 состояния системы техобслуживания вагона 1400 железнодорожного состава, показанный на фиг. 32Е, экран 1490 состояния подсистемы техобслуживания вагона 1400 железнодорожного состава, показанный на фиг. 32F, экран 1492 передаваемых вживую сигналов по запросу вагона 1400 железнодорожного состава, показанный на фиг. 32G, экран 1494 спидометра вагона 1400 железнодорожного состава, показанный на фиг. 32Н, экран 1496 настроек вагона 1420 железнодорожного состава, показанный на фиг. 32I, причем экран 1496 настроек вагона 1420 железнодорожного состава показывает радиокнопку 1498 переключения яркости, показанную на фиг. 32J, и рабочий экран 1480 вагона 1500 железнодорожного состава, показанный на фиг. 32K и 32L.
[00217] Посредством предоставления мгновенного доступа к передаваемым вживую данным и хронологическим данным, на борту объекта 1202 и не на борту объекта 1202, пользователи на борту объекта 1202 и удаленно расположенные пользователи также могут извлекать выгоду из аварийных оповещений в реальном времени, функциональности воспроизведения, отчетов и аналитики. Например, бортовые дисплеи и/или HMI 1210 и удаленный вид 1226 бортовых дисплеев и/или HMI могут отображать экран 1502 операций вагона 1400 железнодорожного состава, показанный на фиг. 32М, экран 1504 загрузок вагона 1420 железнодорожного состава, показанный на фиг. 32N, экран 1508 техобслуживания вагона 1420 железнодорожного состава, показывающий предысторию 1510 конфигураций объектов, включающую в себя информацию версии, показанную на фиг. 320, и экран 1514 настроек вагона 1506 железнодорожного состава, показывающий выполняемый ввод в действие (1516) вагона 1506 железнодорожного состава, показанный на фиг. 32Р. Понимание, полученное из мониторинга в реальном времени, используется, чтобы предотвращать сбои и снижать незапланированное время простоя. Мгновенный доступ к передаваемым вживую данным и хронологическим данным обеспечивает возможность составления расписания техобслуживания объекта 1202 вследствие доступности диагностики в реальном времени. Соединенная система 1200 диагностики обеспечивает удаленную видимость событий всех объектов 1202 в составе, в этой проиллюстрированной примерной реализации, а также возможность отслеживать любой другой объект 1202 в парке. Вид информации журналов отказов, времени возникновения и сброса после отказов, уровней серьезности отказов и т.д. может сортироваться на основе даты, времени или системы. Данные объекта 1202 комбинируются с другой рабочей и контекстной информацией, такой как местоположение на железной дороге и погодные данные, чтобы лучше понимать обстановку, которая может способствовать отказам и проблемам. Отказы или события на объекте 1202 также могут подтверждаться бригадой, которая не присутствует на объекте 1202, и любыми удаленно расположенными конечными пользователями 1214.
[00218] До соединенной системы 1200 диагностики настоящего раскрытия, существующие системы обеспечивали возможность инициирования самотестирований или диагностики бортовых систем на борту транспортного средства только на одном транспортном средстве или в режиме состава. Некоторые существующие системы поддерживали эту функциональность только с ограниченной производительностью.
[00219] Соединенная система 1200 диагностики обеспечивает возможность выполнения самотестирований для бортовых устройств 1218 на объекте 1202 и удаленно также для одного объекта 1202, выбранных объектов 1202 и/или всех объектов 1202 в парке одновременно, что уменьшает усилия, приложенные посредством бригады 1224 техобслуживания, чтобы выполнять самотестирования, и предоставляет отчет для всех объектов 1202.
[00220] До соединенной системы 1200 диагностики настоящего раскрытия, существующие системы требовали от бригад транспортных средств прибывать на назначенный маршрут для железнодорожного состава, что может потенциально приводить к человеческим ошибкам, вызывая потенциальные задержки услуг, предоставляемых транспортным средством, или к сообщению некорректной информации пассажиров и станций.
[00221] Соединенная система 1200 диагностики обеспечивает возможность автоматического назначения объектов 1202 для маршрута, железнодорожного состава, бригады и т.д., из бэк-офисных систем, уменьшая и/или минимизируя потребность во вводе вручную, в этой проиллюстрированной примерной реализации, маршрута железнодорожного состава только до специализированных сценариев. Внебортовой персонал, к примеру, супервизор 1224 и центр 1212 управления, также имеет доступ к информации в реальном времени информации маршрутов железнодорожного состава.
[00222] До соединенной системы 1200 диагностики настоящего раскрытия, существующие системы хранили предысторию ремонтных работ, руководства по эксплуатации и руководства по техобслуживанию не на борту транспортного средства. Это увеличивает время, требуемое для бригады техобслуживания, чтобы выполнять поиск и устранение неисправностей или получать справку по существующим открытым дефектам в транспортном средстве либо по предыстории ремонтных работ.
[00223] Соединенная система 1200 диагностики обеспечивает возможность машинисту 1222 и/или объекту 1202 соединяться и интегрироваться с другими внебортовыми системами управления техническим обслуживанием из бортового дисплея и/или HMI 1210 на объекте 1202, например, с тем, чтобы заказывать деталь из бортового дисплея и/или HMI 1210, искать электронные руководства, которые хранятся не на борту, изучать предысторию ремонтных работ, просматривать все нерешенные проблемы и/или дефекты на объекте 1202 и т.д.
[00224] До соединенной системы 1200 диагностики настоящего раскрытия, бортовые дисплеи и/или HMI существующих систем и пользовательские интерфейсы типично, непрерывно и/или периодически не развивались за счет новейших технологических трендов после того, как они поставлялись с завода, и в силу этого не обновлялись с любыми новыми функциями, к примеру, чтобы включать в себя щипок и изменение масштаба, экран касания или современное графическое представление данных, по мере доступности.
[00225] Соединенная система 1200 диагностики обеспечивает возможность удаленных обновлений технологии бортового дисплея и/или HMI 1210, бортовых систем и/или бортовых подсистем через обновления программного обеспечения по радиоинтерфейсу. Соединенная система 1200 диагностики также обеспечивает возможность локальных обновлений технологии бортового дисплея и/или HMI 1210, бортовых систем и/или бортовых подсистем посредством предоставления возможности пользователю, такому как машинист или бригада техобслуживания, загружать обновление программного обеспечения и инициализировать и подготавливать его на месте либо посредством соединения съемного устройства хранения данных, содержащего обновление. Возможность осуществлять эти обновления непрерывно в течение всего жизненного цикла объекта 1202 повышает эффективность техобслуживания посредством предоставления возможности использовать современные инструменты и технологию.
[00226] До соединенной системы 1200 диагностики настоящего раскрытия, бортовые данные существующих систем были доступны только на транспортном средстве или доступны только для разгрузки с менее частыми интервалами, к примеру, раз в день или раз в неделю, или требовали загрузки бортовых данных посредством физического соединения с бортовыми устройствами на борту транспортного средства. Чаще всего пользователи не могли фиксировать сбой, который возникал по дороге, для поиска и устранения неисправностей.
[00227] Соединенная система 1200 диагностики предоставляет удаленный доступ, чтобы видеть рабочие данные объекта 1202, включающие в себя усовершенствованные данные, такие как данные двигателя, данные оборудования головной мощности (HEP) и данные электрической системы и системы подачи мощности, каждую секунду либо на основе периодических снимков экрана, к примеру, каждые пять минут. Данные из объекта 1202 доступны по запросу или на основе условий и/или правил, установленных пользователем. Удаленный доступ к данным для компоновки по запросу также доступен, чтобы обнаруживать, когда конкретные условия объекта удовлетворяются, и может использоваться пользователем через аварийные оповещения, отчеты и т.д. Это обеспечивает возможность пользователю понимать, когда данные, окружающие конкретные происшествия, возникают по дороге, и удаленно диспетчеризовать журналы объекта 1202 на, чтобы записывать происшествия и/или сбои, которые возникают по дороге.
[00228] Фиг. 34 является блок-схемой последовательности операций способа, показывающей процесс 1250 для передачи данных в реальном времени из бортовых систем и/или бортовых подсистем в бортовой дисплей и/или HMI 1210 и удаленного доступа бортового дисплея и/или HMI 1210 в соответствии с реализацией этого раскрытия. DARS 100, 200, 1000 представляет собой функцию программного обеспечения бортового блока 1216 обработки, и бортовой блок 1216 обработки представляет собой аппаратный компонент соединенной системы 1200 диагностики. В этой примерной реализации, объект 1202 включает в себя несколько бортовых устройств и/или бортовых систем, таких как двери, тормоза, HVAC, силовая установка, контроллеры двигателя и топливные системы, которые дополнительно подразделяются на отдельные бортовые подсистемы, такие как, например, дверь А1, дверь А1, тормоза А, тормоза В и т.д. Бортовые системы и подсистемы важны для функционирования объекта 1202. Бортовые системы и подсистемы отслеживают и считывают данные и предоставляют информацию, чтобы обеспечивать эффективное управление и работу объекта 1202. Бортовая система и подсистемы обмениваются данными (1252) по бортовым каналам 1228 связи и отправляют данные в бортовой блок 1216 обработки для дополнительного анализа (1254). Бортовой блок 1216 обработки отвечает за обработку данных из различных систем, соединенных с ним, предоставляя улучшенные возможности слияния данных, автоматический мониторинг и интеграцию со сторонними устройствами, к примеру, с камерами, с тем чтобы обеспечивать возможность расследования происшествий. С использованием данных, принимаемых из бортовых систем, бортовой блок 1216 обработки может принимать и анализировать условия объекта 1202 и его окружающей инфраструктуры, такие как пути, ограничения скорости, столкновения и синхронизированный мониторинг в реальном времени. Данные из бортовых систем и подсистем декодируются в отдельные сигналы и синхронизируются по времени (1256), чтобы предоставлять значащие данные для потребления пользователями и для дополнительной обработки посредством других бортовых приложений. Декодированные данные доступны на шине данных для одновременного использования посредством нескольких приложений, осуществляющих параллельную обработку для данных в реальном времени (1258). Отдельные сигналы сохраняются в сжатой структуре данных, так что они могут отправляться в бортовые системы и внебортовые системы (1260). Сжатие данных осуществляться, чтобы максимизировать емкость хранения данных на борту объекта 1202 и обеспечивать более быструю разгрузку во внебортовые системы.
[00229] Процесс 1250 затем определяет, с использованием бортового блока 1216 обработки, оснащается или нет объект 1202 бортовым аварийно-ударозащищенным запоминающим модулем (1262). Если объект 1202 включает в себя аварийно-ударозащищенный запоминающий модуль 1220, сжатые данные сохраняются в аварийно-ударозащищенном запоминающем модуле 1220 (1264). Аварийно-ударозащищенный запоминающий модуль 1220 сохраняет данные в течение предварительно определенного количества времени, к примеру, по меньшей мере, в течение 48 часов, в случае если катастрофическое событие имеет место. Предварительно определенное количество времени является конфигурируемым и может регулироваться согласно потребностям клиента. Аварийно-ударозащищенный запоминающий модуль 1220 предоставляет доступ к сжатым данным, даже если подача мощности отключена, и хранит и поддерживает стандарты, установленные посредством Федерального управления железных дорог (FRA), в этой проиллюстрированной примерной реализации, и Институтом инженеров по электротехнике и радиоэлектронике (IEEE). Если объект 1202 не включает в себя аварийно-ударозащищенный запоминающий модуль, ограниченные хронологические данные сохраняются локально на флэш-накопителе, полупроводниковом накопителе и/или в любом другом локальном устройстве хранения данных (1266).
[00230] Одновременно, процесс 1250 определяет, с использованием бортового блока 1216 обработки, то отправляются данные в бортовые системы, внебортовые системы либо как в бортовые системы, так и во внебортовые системы (1268). Данные из борта отправляются в устройства на объекте 1202 и во внебортовые системы одновременно. Если данные отправляются в бортовые системы, несжатые данные отправляются через бортовые каналы 1228 связи (1270) в бортовые дисплеи и/или HMI 1210 (1272), которые предоставляют визуальную и слышимую информацию, включающую в себя обработку на естественном языке, машинистам 1222 объекта 1202 и бригаде 1224 техобслуживания и в бортовые системы и/или бортовые подсистемы (1274). Когда данные используются, чтобы отправлять ответы обратно в идентичную бортовую систему и/или обеспечивать доступность данных из других бортовых систем для бортовых систем, включающих в себя запрашиваемые данные и/или информацию, для бортовых систем и подсистем. Если данные отправляются во внебортовые системы, данные сжимаются посредством кодера 122, 222, 1022 данных DARS 100, 200, 1000, соответственно, и сжатые данные отправляются через внебортовые каналы 1230 связи (1276) из бортовых систем во внебортовые системы (1278). Сжатые данные также сохраняются в базе данных (1280), к примеру, в аварийно-ударозащищенном запоминающем модуле 118, 218, 1018 DARS 100, 200, 1000, соответственно, и необязательно в не-аварийно-ударозащищенном съемном устройстве 219 хранения данных DARS 200. Сжатые данные затем отправляются на облачный сервер реального времени (1284). После приема, сжатые данные затем распаковываются (1282), с использованием декодера 136, 236, 1036 данных DARS 100, 200, 1000 и отправляются на облачный сервер реального времени (1284) для хранения и повторной передачи для более простой достижимости. К данным из облачного сервера реального времени может осуществляться доступ посредством бортовых платформ и/или внебортовых платформ одновременно. Обработанные данные, сохраненные на облачном сервере реального времени, могут просматриваться через удаленную веб-платформу 1208 на нескольких удаленных платформах (1286), таких как планшетные компьютеры, подвижные телефоны и переносные компьютеры, предоставляющих удаленный доступ бортового дисплея и/или HMI 1210. Удаленная платформа, которая включает в себя любое удаленное устройство, которое соединяется с Интернетом, предоставляет веб-средство просмотра, которое обеспечивает возможность пользователям получать данные удаленно в реальном времени, что упрощает интеграцию данных и обеспечивает облачный доступ к возможностям мониторинга в реальном времени, чтобы просматривать, например, географическое местоположение объекта и условия бортовых систем и подсистем.
[00231] Одновременно с сохранением данных (1262) и передачей данных в бортовые системы и/или внебортовые системы (1268), декодированные данные обрабатываются, чтобы проверять исключения (1288), что включает в себя анализ на предмет исключений, сформированных либо посредством бортовых систем непосредственно, таких как сформированные отказы, либо посредством правилах, заданных, чтобы устанавливать пороговые значения для конкретного сигнала и/или набора сигналов, что является необходимым, чтобы понимать, работают либо нет бортовые системы за пределами нормальных пороговых значений и/или за пределами заданных пороговых значений. Исключения также могут включать в себя, но не только, температуру, скорость, ускорение, состояния тормозов, температуру охлаждающей жидкости, наружный воздух, внутренний воздух и работоспособность системы. Пользователь может задавать правила и пороговые значения и также может задавать частоту аварийных оповещений для исключений. Пороговые значения задаются внутренне, и пользователь может задавать минимальные пороговые значения, максимальные пороговые значения и диапазон пороговых значений. Процесс 1250 затем оценивает, с использованием бортового блока 1216 обработки, сигналы, которые обработаны, и определяет то, инициируются или нет какие-либо исключения (1290), к примеру, исключение инициируется для события скорости выше нормальной, когда скорость объекта 1202 больше ранее установленного ограничения скорости в 45 миль/час. Если исключения не инициируются, процесс 1250 продолжается, чтобы определять то, отправляются данные в бортовые системы, внебортовые системы либо как в бортовые системы, так и во внебортовые системы (1268). Если исключения инициируются из обработанных данных, слышимые и визуальные аварийные оповещения, включающие в себя обработку на естественном языке, события, отказы и т.д., формируются из исключений, которые инициируются, и уведомление бортовой и внебортовой бригады активируется для элементов, требующих дальнейших действий или расследования (1292), к примеру, бригада получает оповещение на предмет того, чтобы оставаться в пределах нормативных ограничений скорости. Процесс 1250 затем продолжается, чтобы определять, с использованием бортового блока 1216 обработки, то, отправляются данные в бортовые системы, внебортовые системы либо как в бортовые системы, так и во внебортовые системы (1268).
[00232] Фиг. 35 является блок-схемой последовательности операций способа, показывающей процесс 1300 для передачи хронологических данных в реальном времени из бортовых систем в бортовой дисплей и/или HMI 1210 и удаленного доступа бортового дисплея и/или HMI 1210 одновременно в соответствии с реализацией этого раскрытия. DARS 100, 200, 1000 представляет собой функцию программного обеспечения бортового блока 1216 обработки, и бортовой блок 1216 обработки представляет собой аппаратный компонент соединенной системы 1200 диагностики. Процесс 1300 инициируется посредством одного из двух событий: когда пользователи, присутствующие на объекте 1202, выполняют запрос на борту объекта 1202 с использованием бортового дисплея и/или HMI 1210 на, чтобы осуществлять доступ к хронологическим данным; и когда удаленно расположенный конечный пользователь 1214 выполняет запрос на удаленной платформе и/или веб-клиенте на, чтобы осуществлять доступ к хронологическим данным. Процесс 1300 начинается, когда запрос на, чтобы просматривать хронологические данные, принимается от пользователя на борту объекта 1202 или удаленно расположенного конечного пользователя 1214 через веб-платформу 1208 (1302). Если запрос принят из удаленной веб-платформы 1208, при этом удаленная веб-платформа 1208 включает в себя доступ к удаленному экземпляру бортового дисплея и/или HMI 1210 (1304), к данным осуществляется доступ из облачного хранилища данных (1306), и они отправляются в удаленную веб-платформу 1208 для потребления пользователями. Данные, к которым ранее осуществлен доступ из бортовых систем и бортовых дисплеев и/или HMI 1210, включающие в себя любые данные и события, которые возникают из бортовых систем и бортовых дисплеев и/или HMI 1210, сохраняются в облаке. Сохранение данных в облаке разрешает доступ к хронологическим данным в течение более длительного периода времени по сравнению с бортовым блоком 1216 обработки. Бортовой блок 1216 обработки обычно имеет ограниченные возможности хранения приблизительно в 100 дней данных, причем эта бортовая емкость хранения может продлеваться при необходимости. Посредством использования облачной системы хранения, бортовые системы могут осуществлять доступ к данным, включающим в себя хронологические данные, из облака в течение более длительного периода времени, который обычно составляет два года и также может продлеваться при необходимости.
[00233] Запрос на хронологические данные затем отправляется через внебортовые каналы 1230 беспроводной связи с объектами (1308). Запрос обрабатывается посредством бортового блока 1216 обработки, с тем чтобы определять соответствующие бортовые системы и/или бортовые подсистемы, чтобы принимать информацию (1310). Запрос на хронологические данные, к которым должен осуществляться доступ посредством бортового дисплея и/или HMI 1210, может включать в себя, например, хронологический вид сформированных событий, отказов и т.д. (1312). Данные, принимаемые из облака, затем передаются на удаленной веб-платформе 1208 (1304) через внебортовые каналы 1230 беспроводной связи с объектами (1308). Удаленный экземпляр 1206 бортового дисплея и/или HMI 1210 отображает хронологические данные, запрашиваемые пользователем.
[00234] Если запрос принят из бортовой платформы, процесс 1300 определяет, с использованием бортового блока 1216 обработки, то, находятся или нет запрашиваемые данные в локальных котированных данных, доступных на бортовом блоке 1216 обработки (1320). Если котированные данные не доступны, запрос обрабатывается посредством бортового блока 1216 обработки, с тем чтобы определять соответствующие бортовые системы и/или бортовые подсистемы, чтобы извлекать информацию (1310), и запрос на, чтобы извлекать данные проходит во внебортовом направлении. Запрос на хронологические данные, к которым должен осуществляться доступ посредством бортового дисплея и/или HMI 1210, может включать в себя, например, хронологический вид сформированных событий, отказов и т.д. (1312). Данные, принимаемые из соответствующих бортовых систем и/или подсистем, затем передаются на бортовой дисплей и/или HMI 1210 через бортовые каналы 1228 проводной связи с объектами (1314). Бортовой дисплей и/или HMI 1210 отображают данные, которые пользователь запрашивает (1316), включающие в себя визуальную и слышимую информацию и обработку на естественном языке, и данные дополнительно могут использоваться, чтобы отправлять ответы, которые могут включать в себя запрашиваемые данные и/или информацию, включающую в себя отказы, самотестирования и т.д., в бортовые системы и бортовые подсистемы (1318). Если котированные данные доступны, котированные данные, включающие в себя хронологические данные, запрашиваемые пользователем, используются (1322) и отправляются в бортовой блок 1216 обработки (1310). Запрос на хронологические данные, к которым должен осуществляться доступ посредством бортового дисплея и/или HMI 1210, может включать в себя, например, хронологический вид сформированных событий, отказов и т.д. (1312). Данные, принимаемые из локального кэша, затем передаются на бортовой дисплей и/или HMI 1210 через бортовые каналы 1228 проводной связи с объектами и/или внебортовые каналы 1230 беспроводной связи с объектами (1314). Бортовой дисплей и/или HMI 1210 отображают данные, которые пользователь запрашивает (1316), включающие в себя визуальную и слышимую информацию и обработку на естественном языке, и данные дополнительно могут использоваться, чтобы отправлять ответы, которые могут включать в себя запрашиваемые данные и/или информацию, включающую в себя отказы, самотестирования и т.д. в бортовые системы и бортовые подсистемы (1318).
[00235] Фиг. 36 является блок-схемой последовательности операций способа, показывающей процесс 1330, показывающий поток данных из удаленной платформы в бортовые системы и бортовой дисплей и/или HMI 1210, чтобы выполнять определенные пользовательские действия и/или обновлять программное обеспечение в соответствии с реализацией этого раскрытия. Удаленная веб-платформа 1208 обеспечивает возможность пользователям предпринимать действия и/или отправлять команды в бортовые системы, что обеспечивает возможность удаленно расположенным конечным пользователям 1214 поддерживать и отслеживать объекты 1202. Устанавливается набор правил и норм, чтобы разрешать или запрещать запросы, отправленные от удаленно расположенного конечного пользователя 1214. Процесс 1330 отслеживает, с использованием удаленной веб-платформы 1208, удаленную веб-платформу 1208 на предмет запросов от удаленно расположенных конечных пользователей 1214 для действий и/или команд (1332), таких как, например, отказы, самотестирования и диагностика. Процесс 1330 определяет, с использованием удаленной веб-платформы 1208, то, запрошено или нет пользовательское действие (1334) через удаленную веб-платформу 1208. Если удаленная веб-платформа 1208 не принимает запрос пользователя 1214 на действие и/или команду, процесс 1330 продолжает отслеживать, с использованием удаленной веб-платформы 1208, удаленную веб-платформу 1208 на предмет того, чтобы ловить любые запросы, отправленные удаленно расположенными конечными пользователями 1214 из удаленной платформы (1336). Если удаленная веб-платформа 1208 принимает запрос пользователя 1214 на действие и/или команду, запрос отправляется из удаленной веб-платформы 1208 через внебортовые каналы 1230 беспроводной связи с объектами в бортовой блок 1216 обработки (1338). Бортовой блок 1216 обработки принимает входящие запросы, отправленные посредством любых удаленных платформ (1340). Бортовой блок 1216 обработки определяет характер запроса, выполняемого в бортовые системы (1342), к примеру, самотестирования (например, самотестирование двери может проводиться удаленно посредством инициирования команды, и система и/или подсистема дверей может сообщать состояние своего самотестирования после того, как оно завершается), подтверждение отказов и обновления программного обеспечения (например, обновление программного обеспечения бортовой системы).
[00236] Бортовой блок 1216 обработки определяет то, заключается или нет запрос в том, чтобы обновлять программное обеспечение удаленно (1344). Если запрос не заключается в том, чтобы обновлять программное обеспечение удаленно, бортовой блок 1216 обработки определяет характер запроса пользовательского действия, выполняемого для бортовых систем (1346). Бортовой блок 1216 обработки затем определяет то, предназначен запрос для бортового дисплея и/или HMI 1210 либо для бортовых систем и/или бортовых подсистем (1348). Если запрос предназначен для бортового дисплея и/или HMI 1210, бортовой блок 1216 обработки выполняет запрошенное пользовательское действие, и бортовой дисплей и/или HMI 1210 отображает действие, которое пользователь запрашивает (1350), что включает в себя визуальную и слышимую информацию и обработку на естественном языке. Если запрос предназначен для бортовых систем и/или подсистем, бортовой блок 1216 обработки идентифицирует бортовую систему и/или бортовую подсистему, чтобы отправлять запрос пользователя 1214 (1352).
[00237] Если запрос заключается в том, чтобы обновлять программное обеспечение удаленно, бортовой блок 1216 обработки определяет то, заключается или нет запрос в том, чтобы обновлять программное обеспечение на бортовом блоке 1216 обработки 1356. Если заключается в том, чтобы обновлять программное обеспечение на бортовом блоке 1216 обработки, программное обеспечение на бортовом блоке 1216 обработки обновляется (1358). Программное обеспечение бортового блока 1216 обработки обновляется на регулярной основе таким образом, что оно включает в себя любые новые функции или ошибки, которые исправлены в качестве части процесса разработки и выпуска программного обеспечения. Информация версии для конкретной бортовой системы и/или подсистемы, для которой обновлено программное обеспечение, в таком случае доступна на удаленной веб-платформе 1208, а также на бортовых дисплеях и/или HMI 1210 (1354). Обновление программного обеспечения также может проводиться непосредственно из бортовой системы и/или бортового дисплея и/или HMI 1210 с использованием каналов 1230 беспроводной связи бортового блока 1216 обработки. Бортовой блок 1216 обработки затем продолжает отслеживать на предмет входящих запросов, отправленных посредством любых удаленных платформ (1340).
[00238] Если запрос не заключается в том, чтобы обновлять программное обеспечение на бортовом блоке 1216 обработки, бортовой блок 1216 обработки затем определяет, заключается или нет запрос в том, чтобы обновлять программное обеспечение на бортовом дисплее и/или HMI 1210 либо на бортовых системах и/или бортовых подсистемах 1360. Если запрос заключается в том, чтобы обновлять программное обеспечение на бортовом дисплее и/или HMI 1210, бортовой блок 1216 обработки определяет, какие конкретные бортовые дисплеи и/или HMI 1210 должны обновляться 1362. Программное обеспечение на конкретных бортовых дисплеях и/или HMI 1210 обновляется, и бортовой дисплей и/или HMI 1210 отображает информацию версии для обновления программного обеспечения, которое завершено (1350), включающую в себя любую визуальную и слышимую информацию и обработку на естественном языке. Дополнительно, в другой примерной реализации, обновление программного обеспечения и информация версии для обновления программного обеспечения могут отображаться через всплывающие окна как на борту объекта 1202 на бортовых дисплеях и HMI 1210, так и удаленно от объекта 1202 на удаленном экземпляре бортовых дисплеев и/или HMI на удаленной веб-платформе 1208. Если запрос заключается в том, чтобы обновлять программное обеспечение на бортовых системах и/или подсистемах, бортовой блок 1216 обработки определяет, какие конкретные бортовые системы и/или бортовые подсистемы должны обновляться (1364). Программное обеспечение на конкретной бортовой системе и/или подсистеме обновляется и информация версии для конкретной бортовой системы и/или подсистемы, для которой обновлено программное обеспечение, в таком случае доступна на удаленной веб-платформе 1208, а также на бортовых дисплеях и/или HMI 1210 (1354).
[00239] Фиг. 37 является блок-схемой последовательности операций способа, показывающей процесс 1370 интеграции данных между сторонними устройствами, чтобы получать информацию объекта 1202, и/или интеграции данных с системой управления техническим обслуживанием клиентов / объектов 1202, чтобы предоставлять вид в реальном времени информации в соединенной системе 1200 диагностики в соответствии с реализацией этого раскрытия. Назначение транспортных средств для железнодорожных составов, в этой проиллюстрированной примерной реализации, представляет собой сложную задачу, обычно выполняемую посредством сторонней услуги или клиента. Назначение также заключает в себе информацию бригад, информацию маршрутов, расписания движения железнодорожных составов, информацию станций и т.д. Данные назначения, в том числе, но не только, назначение железнодорожных составов, информация маршрутов, информация бригад, расписание движения железнодорожных составов и информация станций, автоматически интегрируются в бортовые дисплеи и/или HMI 1210 (1372). Системы 1374 управления клиентами и/или объектами включают в себя широкий спектр информации (1374), в том числе, но не только, проблемы, дефекты транспортных средств, из служебной информации, электронных руководств, предыстории ремонтных работ и т.д., что является ценным для бригады транспортного средства, с тем чтобы выполнять поиск и устранение неисправностей. Данные из соединенной системы 1200 диагностики и/или из сторонних устройств, такие как информация 1372 железнодорожных составов и/или системы 1374 управления техническим обслуживанием клиентов / объектов, интегрируются через канал проводной связи, канал беспроводной связи и/или каналы связи типа "бизнес-бизнес" (В2В) (1376). Данные, принимаемые из соединенной системы 1200 диагностики и/или сторонних устройств, включающие в себя информацию 1372 железнодорожных составов и/или системы 1374 управления техническим обслуживанием клиентов / объектов, могут обрабатываться и анализироваться до отправки в облако (1378). Если данные обрабатываются, данные анализируются, например, на предмет исключений, проверки ошибок, проверки достоверности данных и/или дополнительно обрабатываются посредством DARS 100, 200, 1000. Данные отправляются в облако для целей хранения данных и могут оцениваться посредством бортовых систем и/или внебортовых систем при необходимости (1380). Удаленная веб-платформа 1208 имеет доступ к данным по облаку через удаленный доступ бортовых дисплеев и/или HMI 1210 с использованием удаленных устройств, таких как планшетные компьютеры, подвижные телефоны и переносные компьютеры (1382), что обеспечивает возможность одновременного просмотра данных соединенной системы 1200 диагностики и/или сторонних данных на борту объекта 1202 и не на борту объекта 1202. Данные отправляются через внебортовые каналы 1230 беспроводной связи с объектами (1384) в бортовой блок 1216 обработки для дополнительного распределения (1386). Бортовой блок 1216 обработки отправляет данные через бортовые каналы 1228 проводной связи с объектами (1388) в бортовой дисплей и/или HMI 1210 (1390) и/или бортовые системы и/или подсистемы (1392). Данные из сторонних устройств могут использоваться, чтобы предоставлять доступ к данным, таким как, например, информация пассажиров, которая требуется посредством бортовых систем и/или подсистем для эффективной работы и техобслуживания. Бортовые дисплеи и/или HMI 1210 могут предоставлять доступ к электронным руководствам, к которым требуется доступ посредством сторонней интеграции между системами управления техническим обслуживанием клиентов / объектов и бортовым блоком 1216 обработки. Бортовые дисплеи и/или HMI 1210 также имеют доступ к дополнительным сторонним данным, таким как предыстория ремонтных работ, проблемы и дефекты, и предоставляют вид в реальном времени сторонних данных, таких как назначенный маршрут, железнодорожный состав и бригада объекта 1202.
[00240] При использовании в данной заявке, термин "или" имеет намерение означать включающее "или", а не исключающее "или". Таким образом, если не указано иное или не очевидно из контекста, "X использует А или В" имеет намерение означать любую из естественных включающих перестановок. Иными словами, если X включает в себя А; X включает в себя В; или X включает в себя как А, так и В, то "X включает в себя А или В" удовлетворяется в любом из вышеуказанных случаев. Помимо этого, "X включает в себя по меньшей мере одно из А и В", имеет намерение означать любую из естественных содержащих перестановок. Иными словами, если X включает в себя А; X включает в себя В; или X включает в себя как А, так и В, то "X включает в себя по меньшей мере одно из А и В" удовлетворяется в любом из вышеуказанных случаев. Упоминание в единственном числе при использовании в данной заявке и прилагаемой формуле изобретения, в общем, должно истолковываться означающим "один или более", если иное не указано или не очевидно из контекста, что направлено на форму единственного числа. Кроме того, использование термина "реализация" или "одна реализация" во всей заявке не имеет намерение означать идентичный вариант осуществления, аспект или реализацию, если не описано фактически.
[00241] Хотя настоящее раскрытие описано в связи с конкретными вариантами осуществления, следует понимать, что раскрытие не должно ограничиваться раскрытыми вариантами осуществления, а наоборот, имеет намерение охватывать различные модификации и эквивалентные компоновки, включенные в пределы объема прилагаемой формулы изобретения, причем этот объем должен соответствовать самой широкой интерпретации, так что он охватывает все такие модификации и эквивалентные структуры в установленных законодательством пределах.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АВТОМАТИЗИРОВАННОГО МОНИТОРИНГА СООТВЕТСТВИЯ СИГНАЛОВ И АВАРИЙНОГО ОПОВЕЩЕНИЯ | 2020 |
|
RU2812263C2 |
| СИСТЕМА СОВМЕСТНОГО ИСПОЛЬЗОВАНИЯ ДАННЫХ ДЛЯ ПОЛУЧЕНИЯ И ЗАПИСИ ДАННЫХ В РЕАЛЬНОМ ВРЕМЕНИ | 2019 |
|
RU2786372C2 |
| СПОСОБ И СИСТЕМА АНАЛИЗА ВИДЕОКОНТЕНТА ДЛЯ ТРАНСПОРТНОЙ СИСТЕМЫ | 2017 |
|
RU2784892C2 |
| СИСТЕМА ПОЛУЧЕНИЯ И ЗАПИСИ ДАННЫХ В РЕЖИМЕ РЕАЛЬНОГО ВРЕМЕНИ | 2017 |
|
RU2747330C2 |
| СПОСОБ И СИСТЕМА ОБРАБОТКИ, ХРАНЕНИЯ И ПЕРЕДАЧИ ДАННЫХ ОТ ПО МЕНЬШЕЙ МЕРЕ ОДНОГО ПОДВИЖНОГО ОБЪЕКТА | 2017 |
|
RU2757175C2 |
| ВЫГРУЗКА ЗАДАЧ ЧЕЛОВЕКО-МАШИННОГО ВЗАИМОДЕЙСТВИЯ | 2014 |
|
RU2647659C2 |
| СПОСОБ И СИСТЕМА ДЛЯ ЭКСПЛУАТАЦИИ МОБИЛЬНЫХ ПРИЛОЖЕНИЙ В ТРАНСПОРТНОМ СРЕДСТВЕ | 2011 |
|
RU2589311C2 |
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ ПРИЛОЖЕНИЕМ "ИНТЕРНЕТ РАДИО" В ТРАНСПОРТНОМ СРЕДСТВЕ | 2010 |
|
RU2535179C2 |
| СИСТЕМА И СПОСОБ БЕСКОНТАКТНОГО УПРАВЛЕНИЯ ПРИЛОЖЕНИЕМ "ЭЛЕКТРОННЫЙ КАЛЕНДАРЬ" В ТРАНСПОРТНОМ СРЕДСТВЕ | 2010 |
|
RU2554848C2 |
| ПРОЦЕССОР ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ ОТСЛЕЖИВАНИЯ И ПРЕДОСТАВЛЕНИЯ ОТЧЕТА ОБ ИСПОЛЬЗОВАНИИ ТРАНСПОРТНОГО СРЕДСТВА И АССОЦИИРОВАННОЙ СТОИМОСТИ ТОПЛИВА | 2016 |
|
RU2722243C2 |
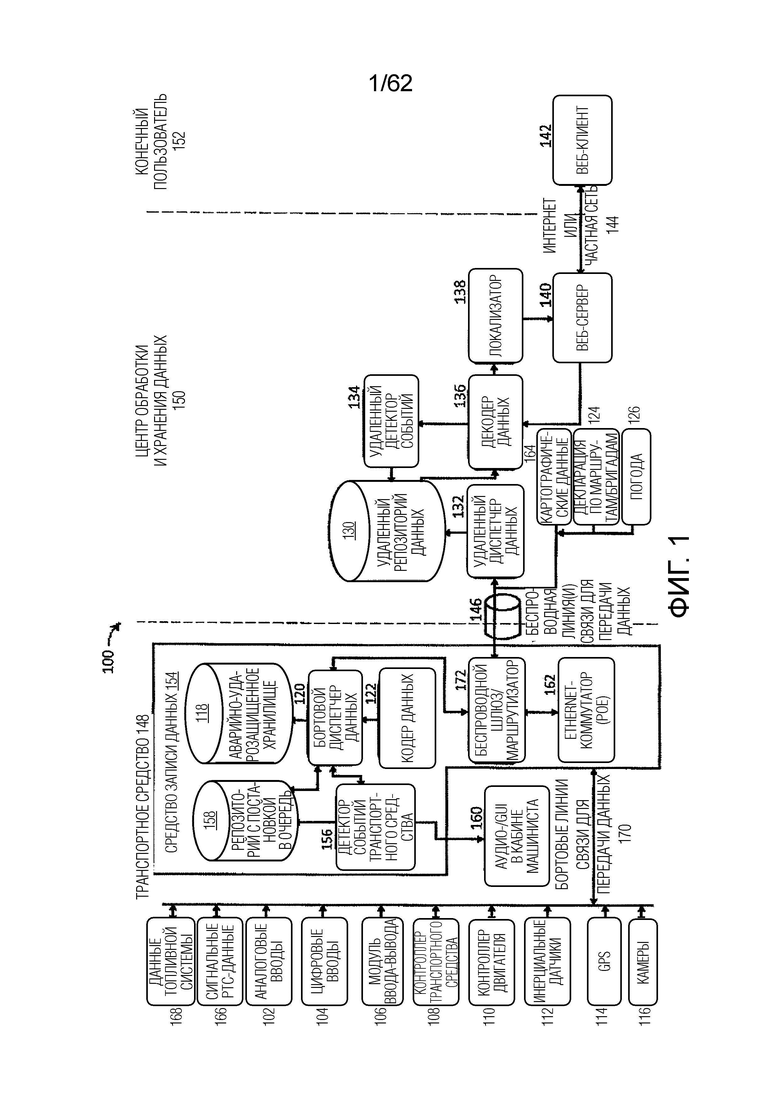
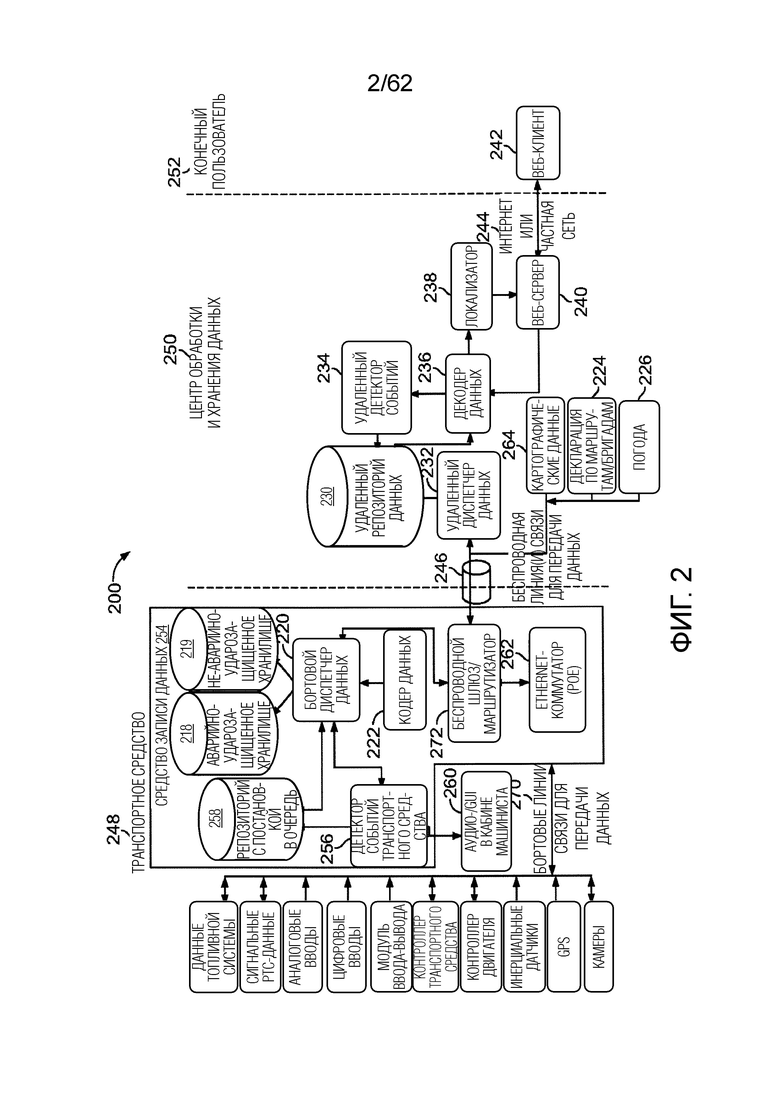
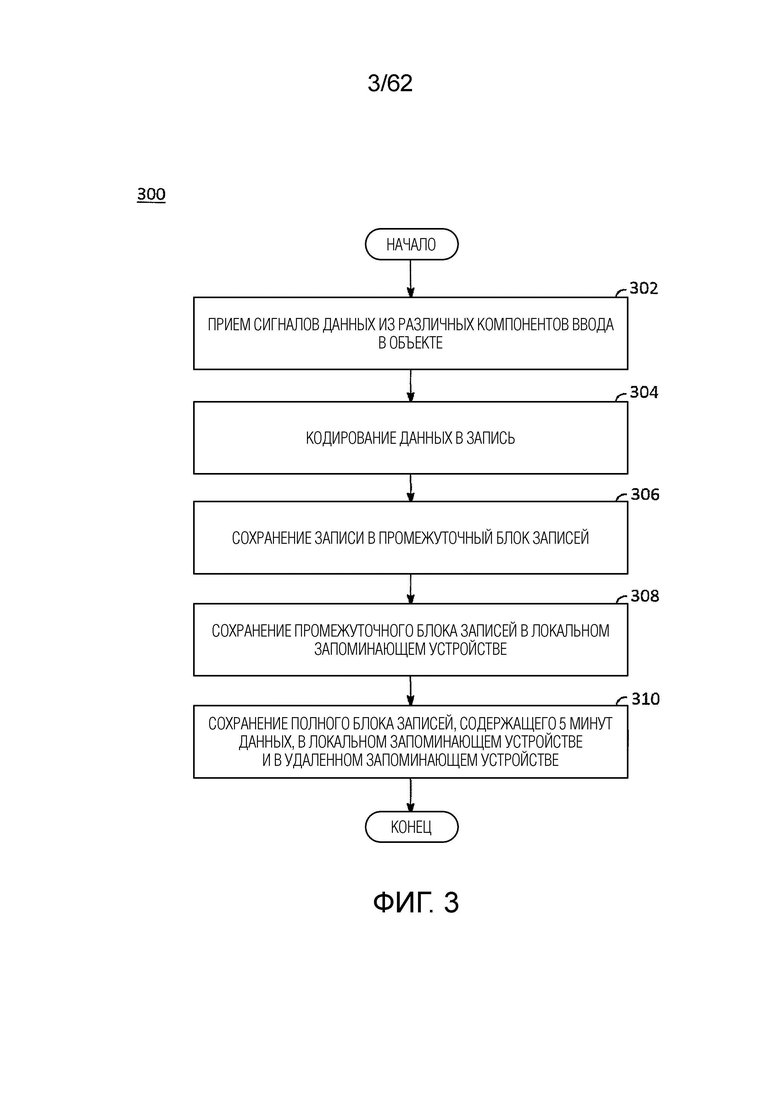
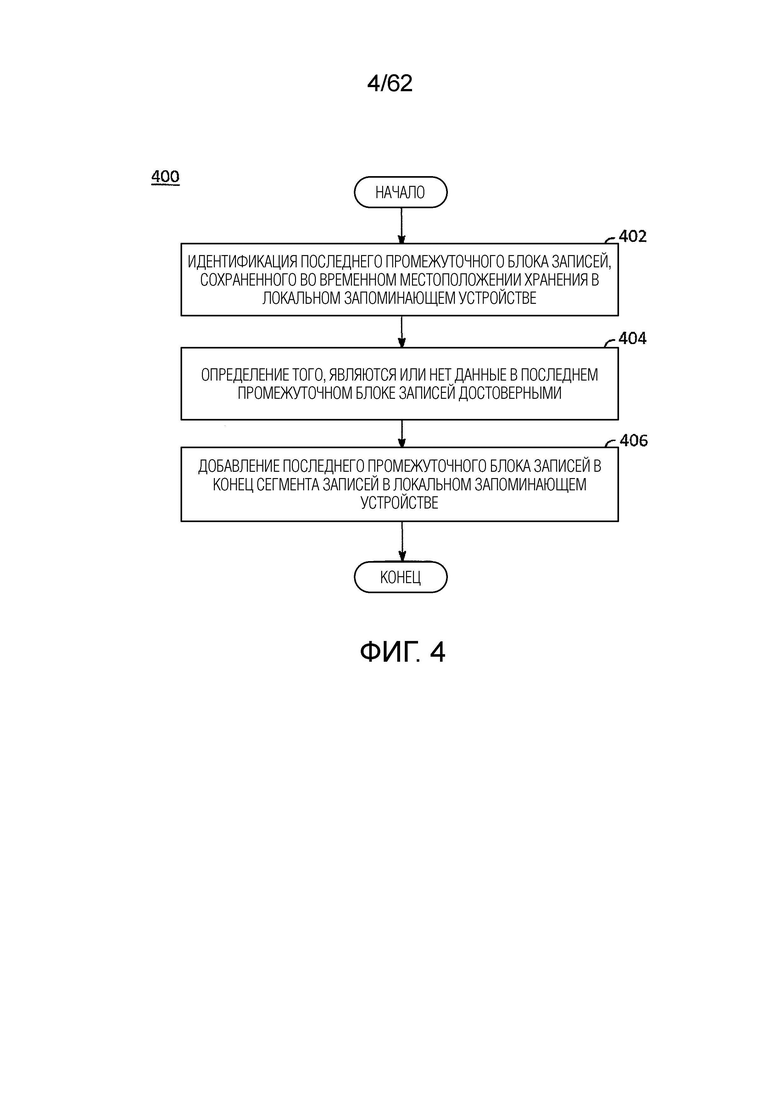
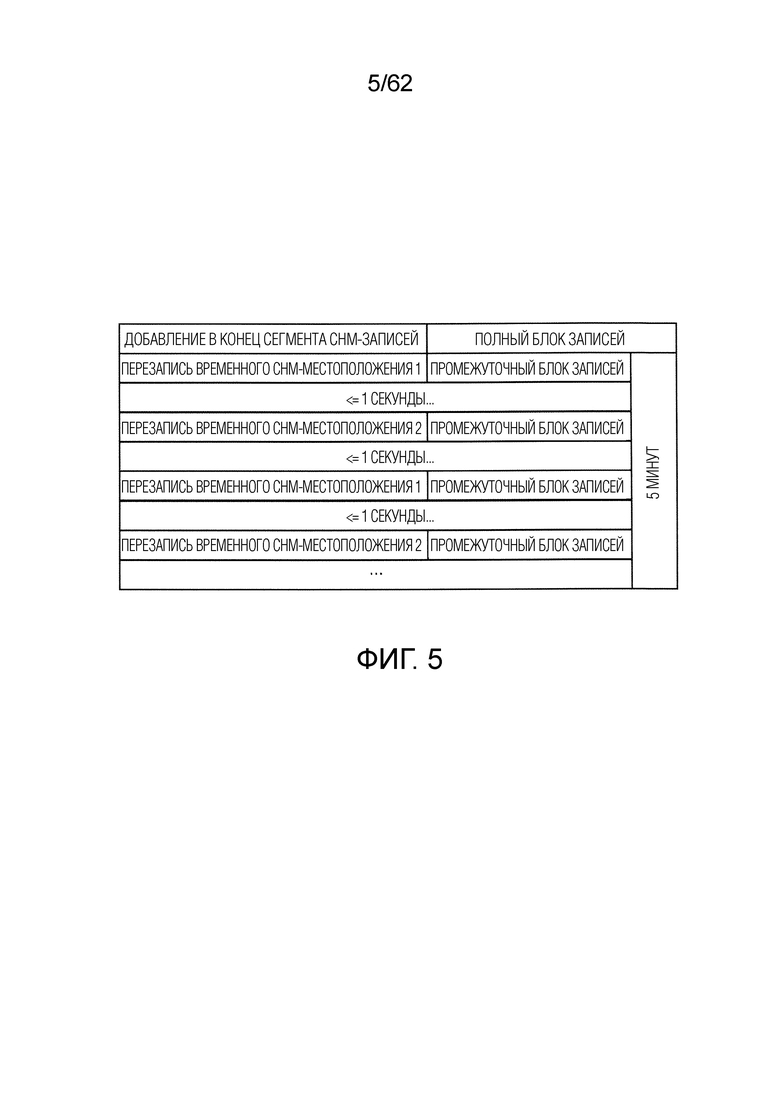
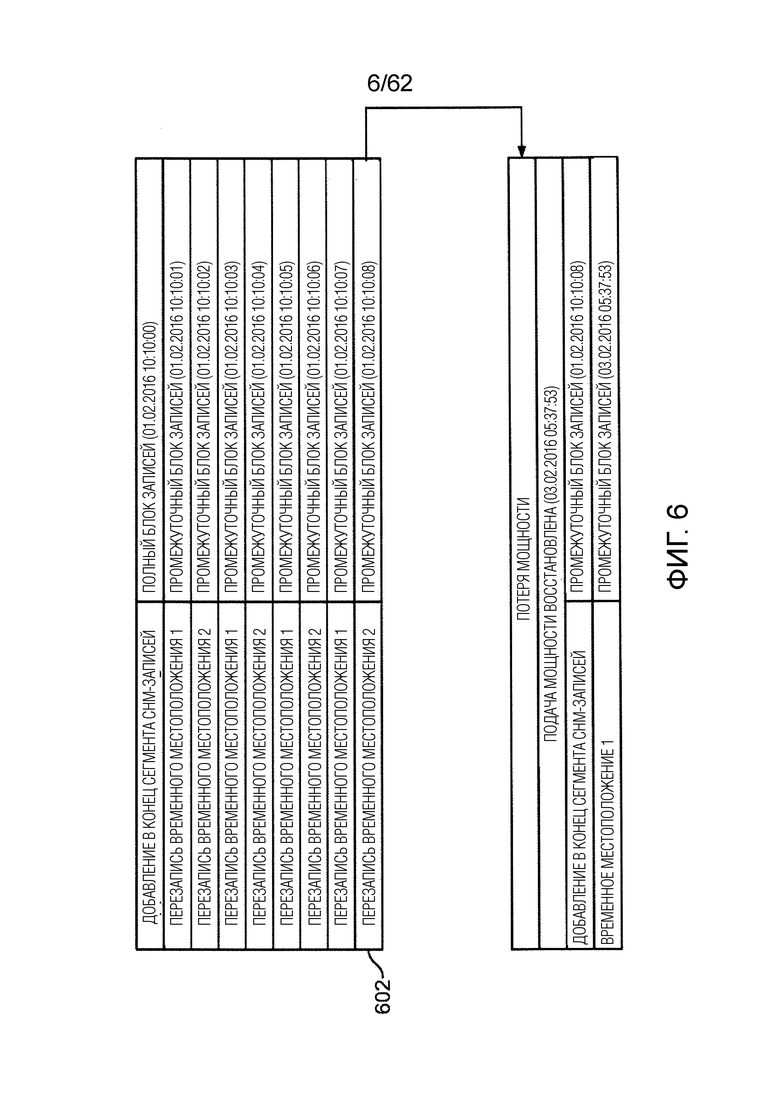
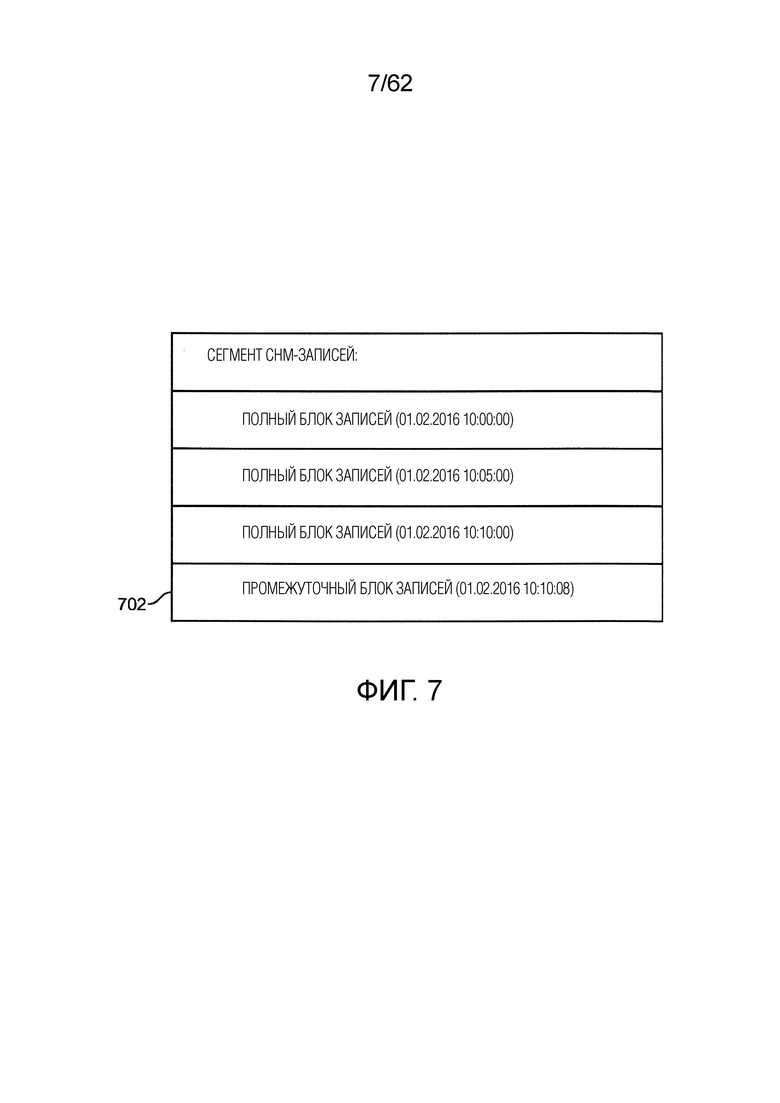

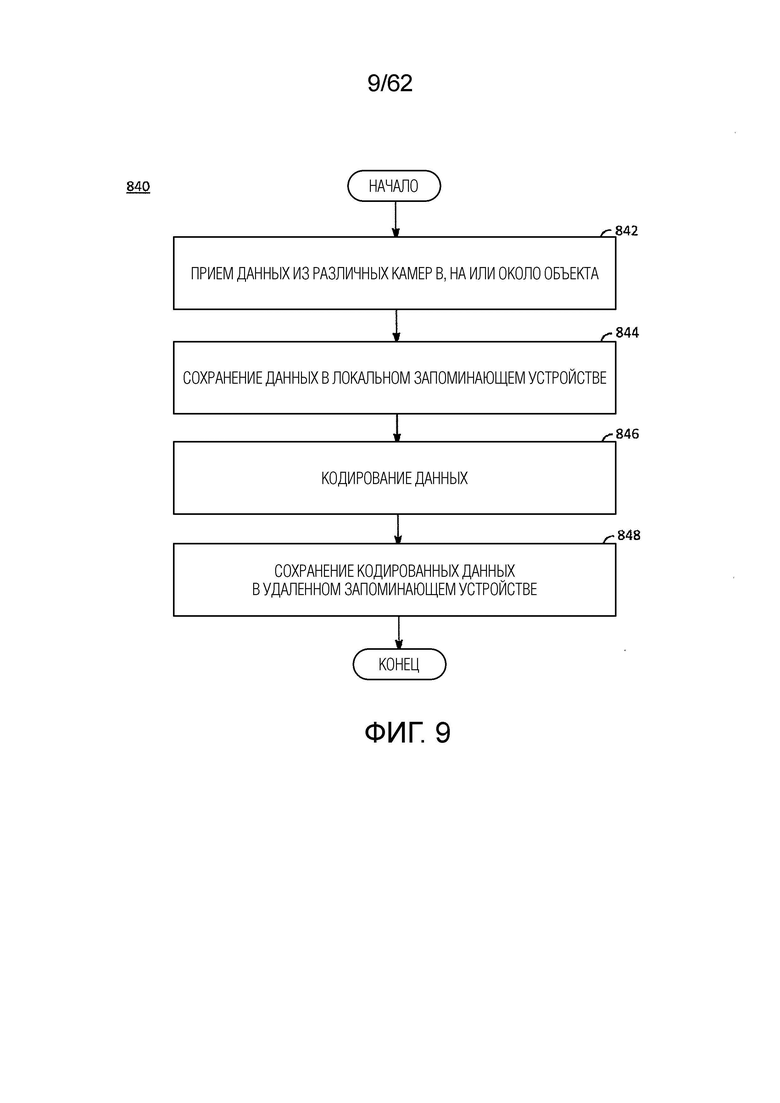
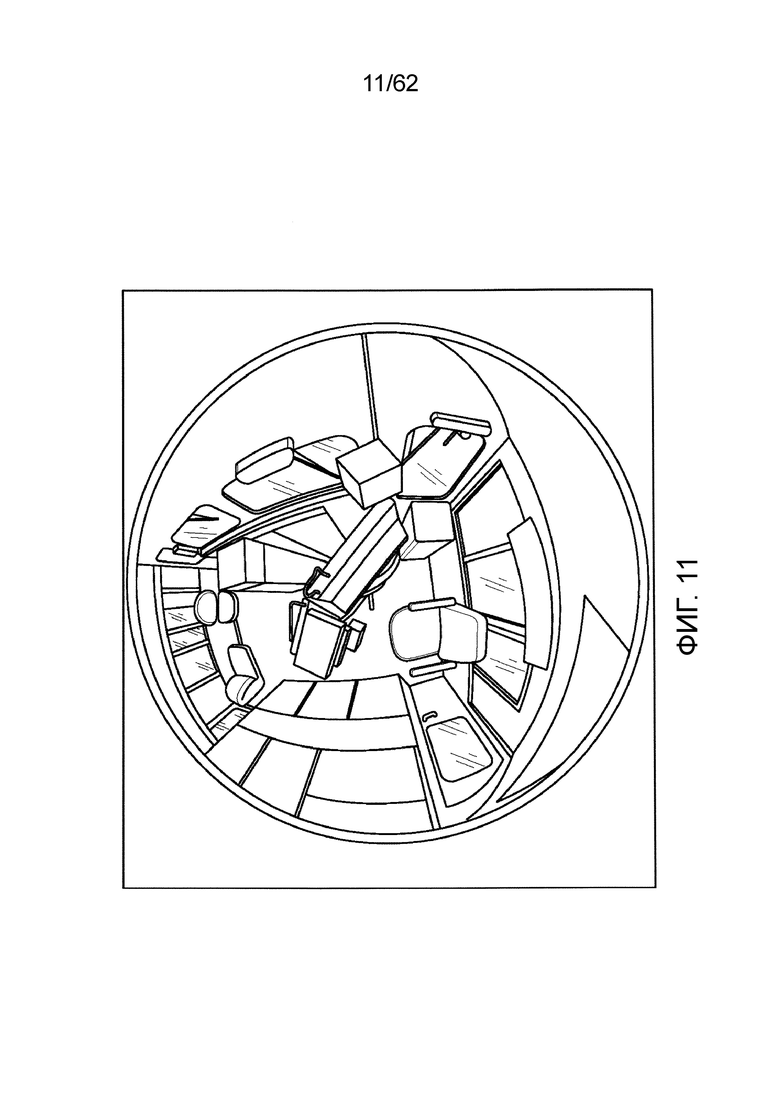
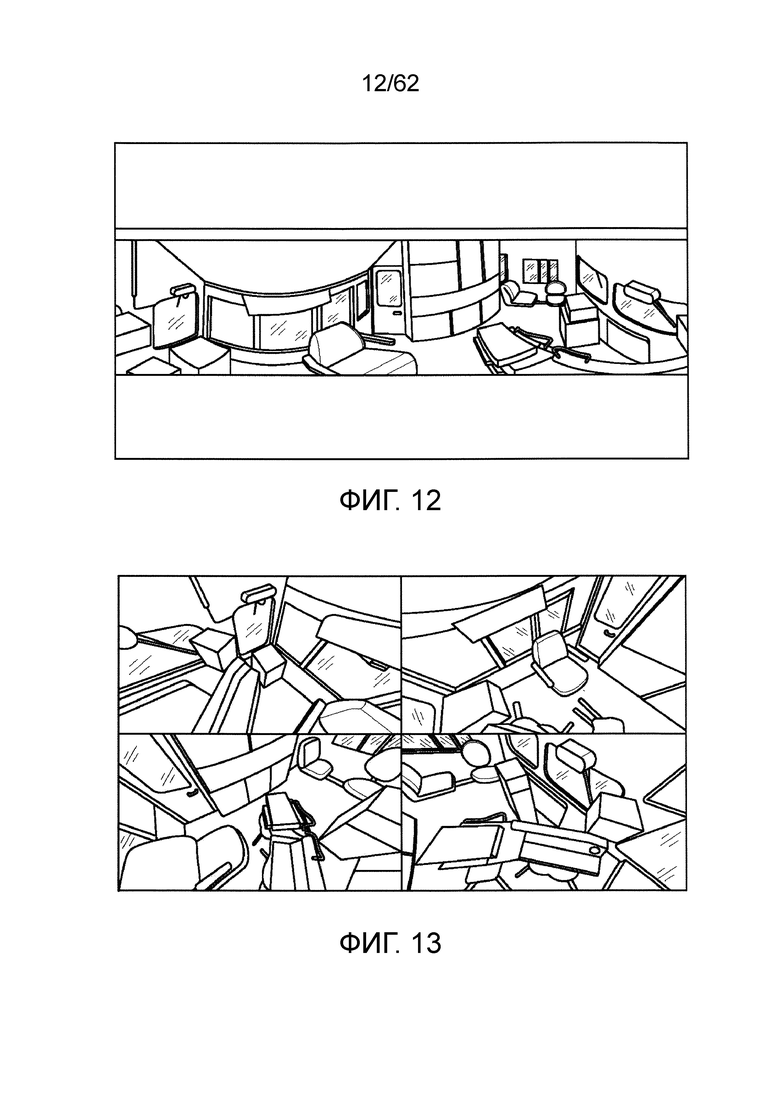
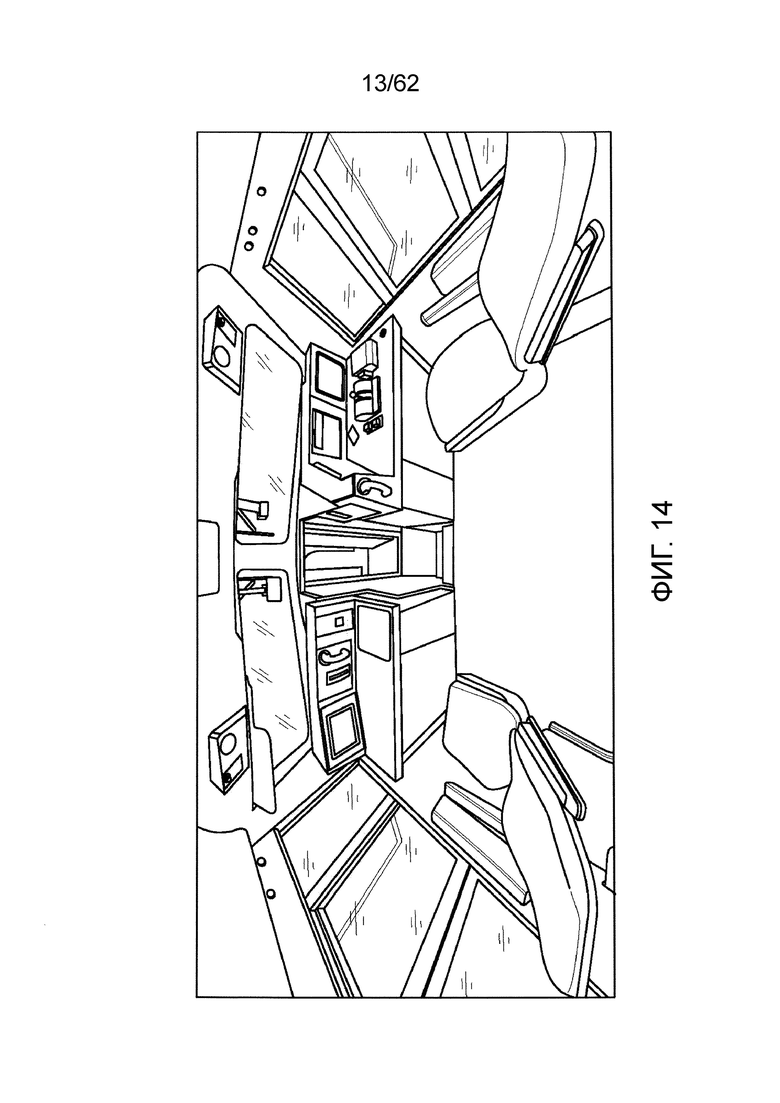
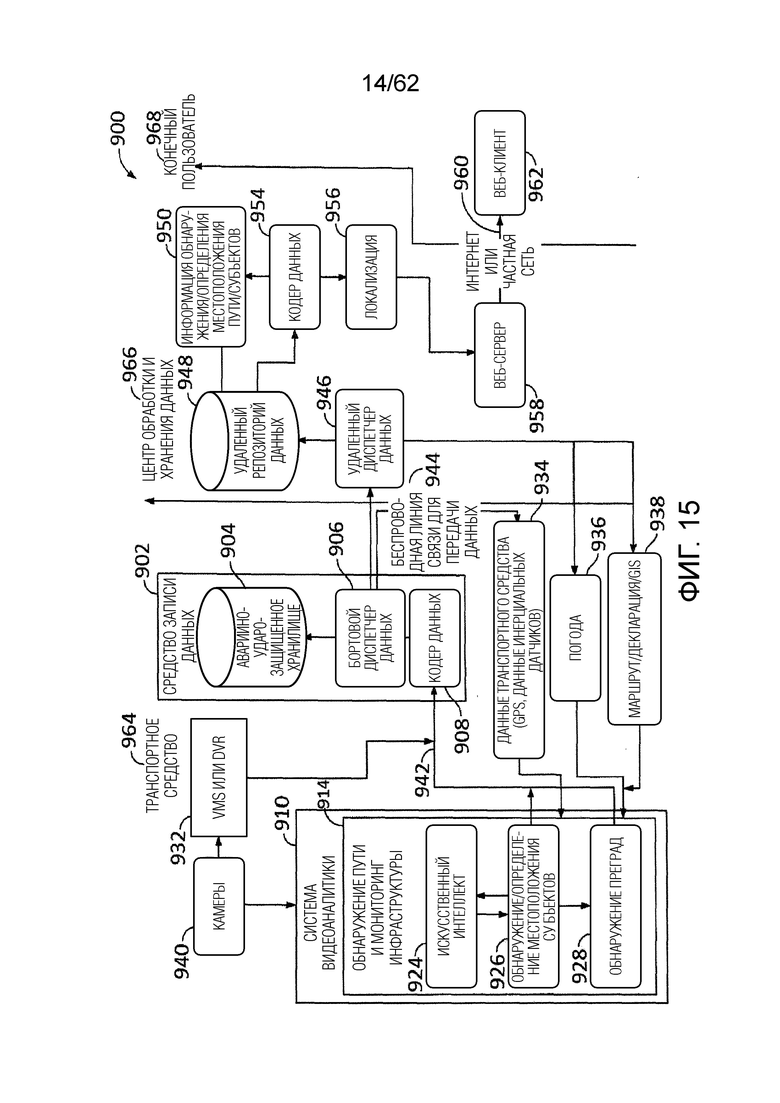
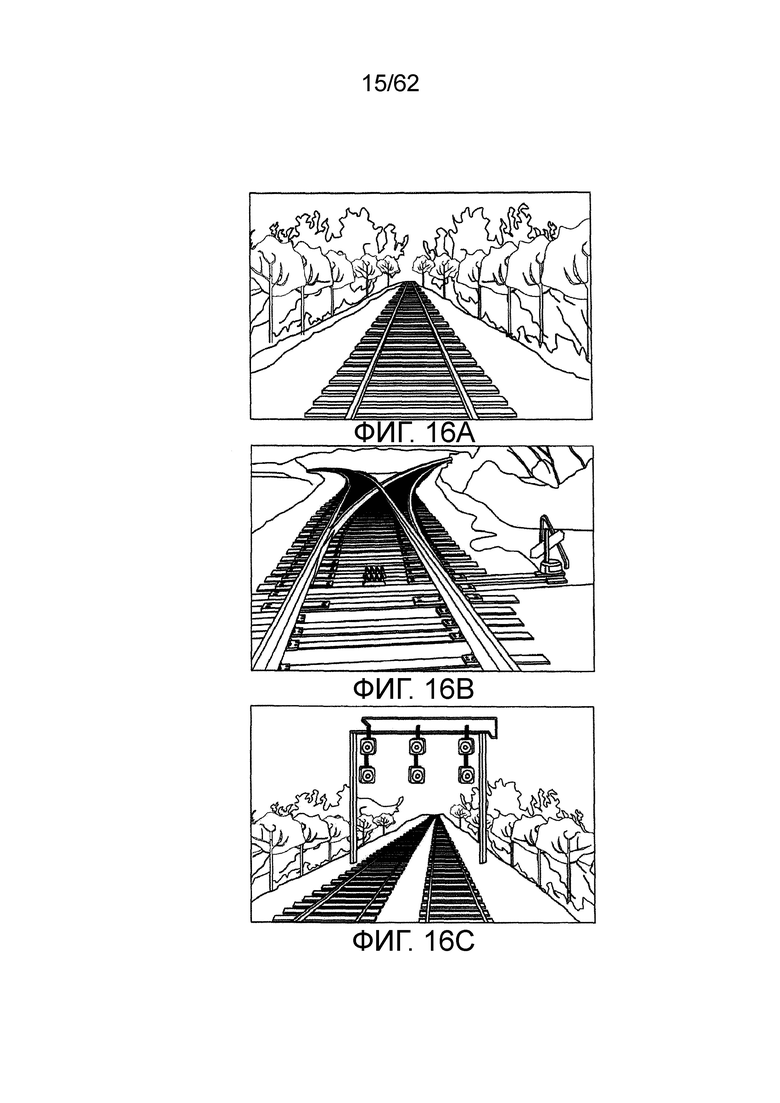
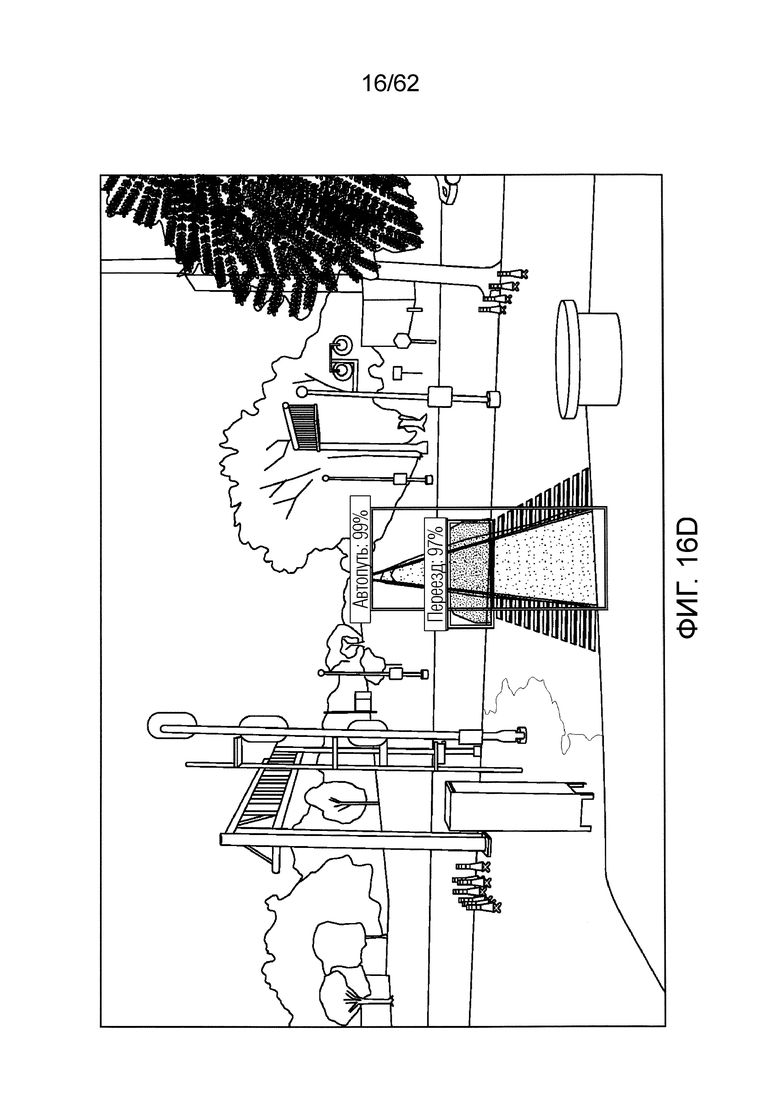
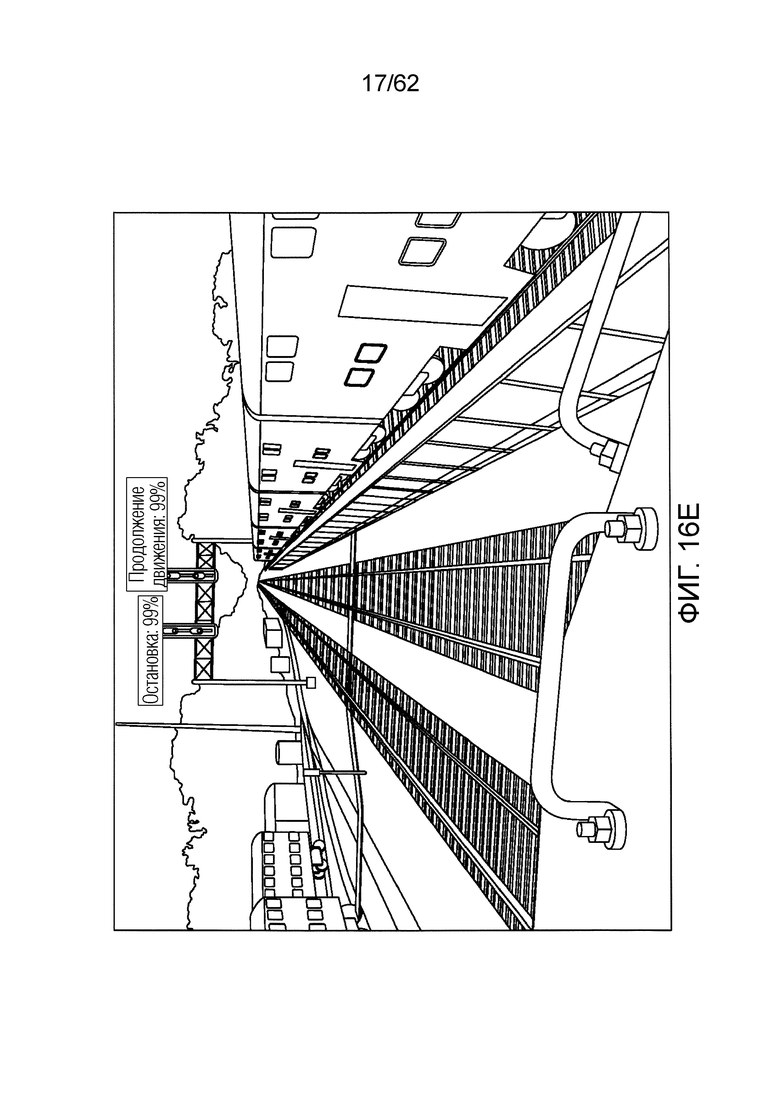
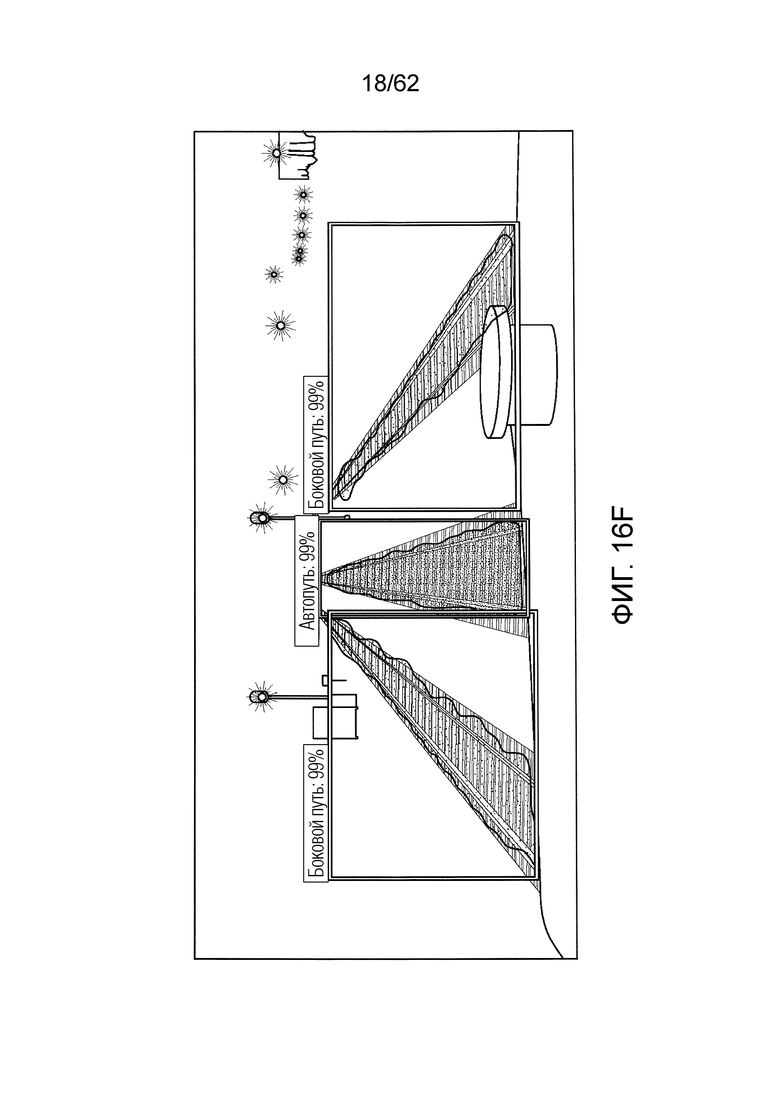
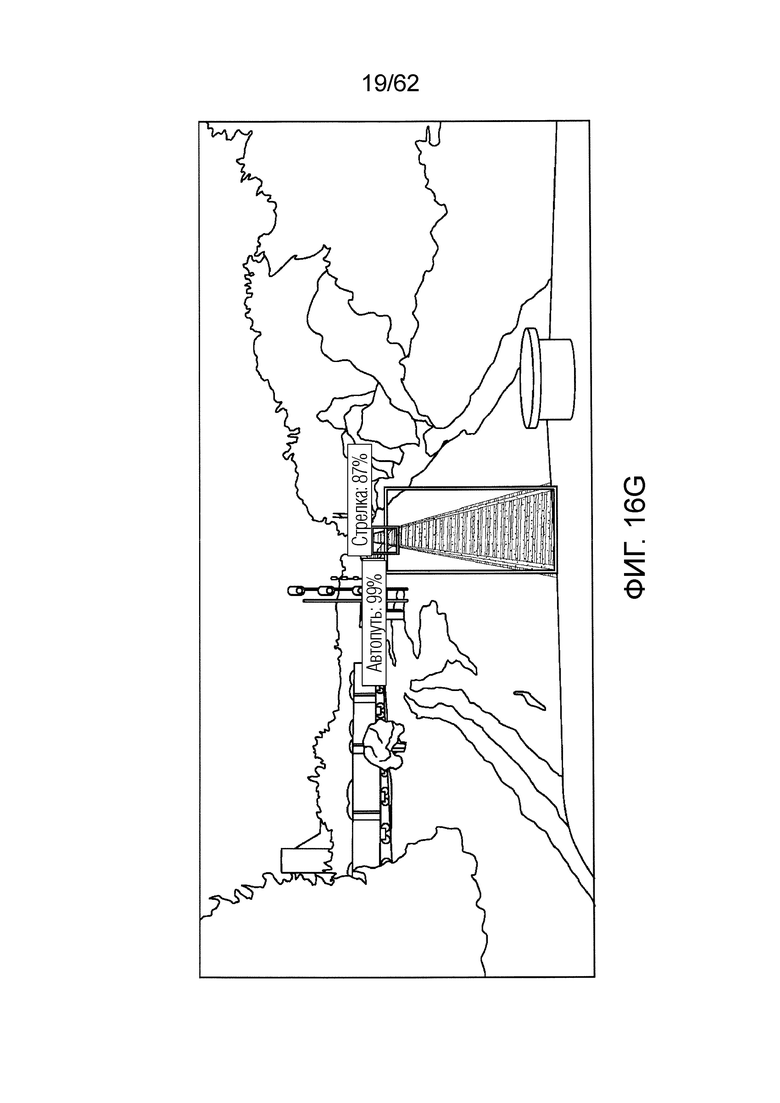
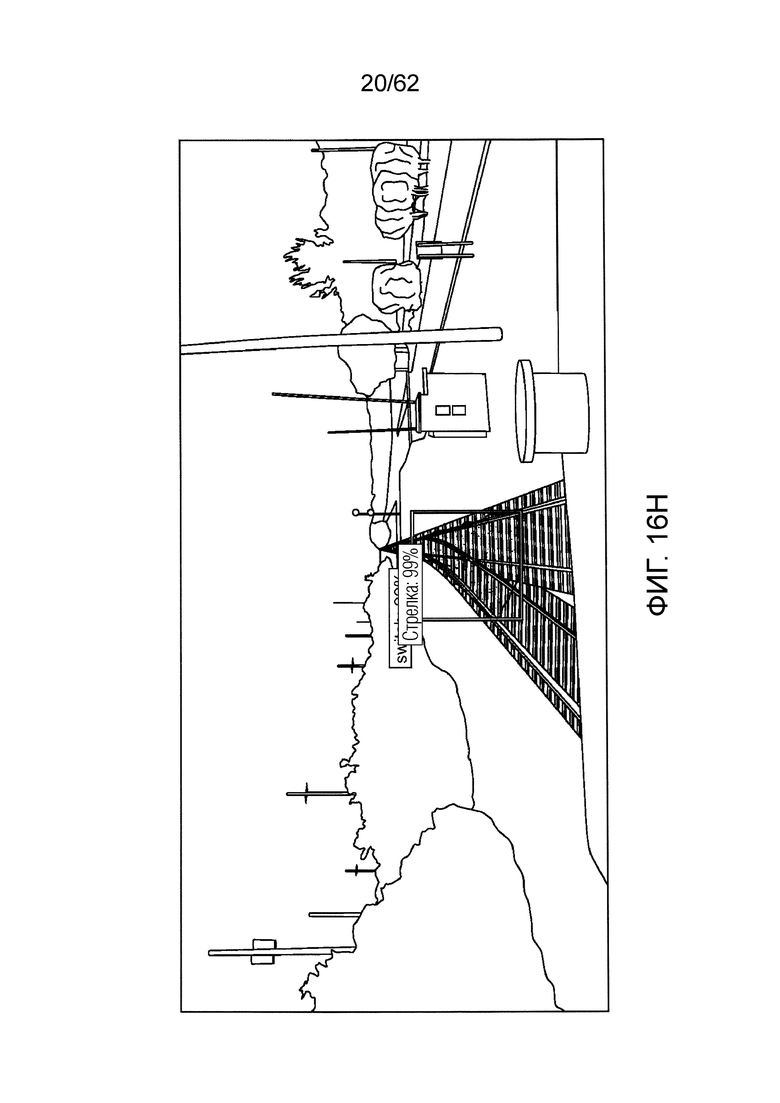
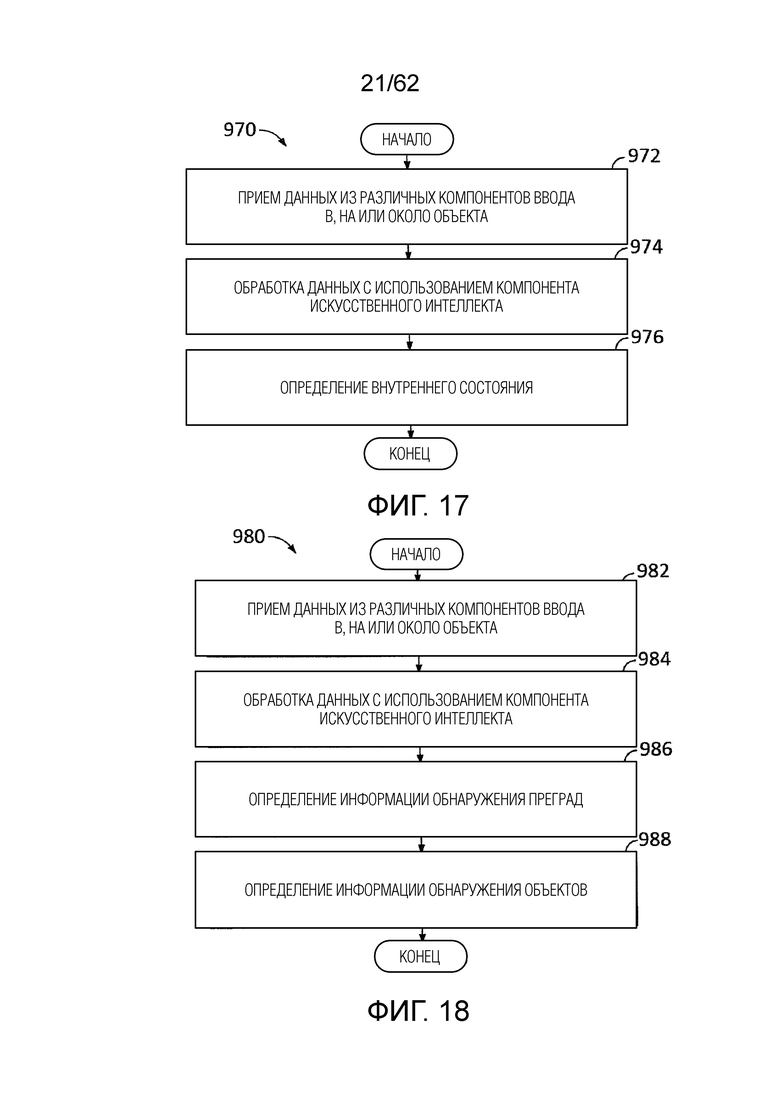
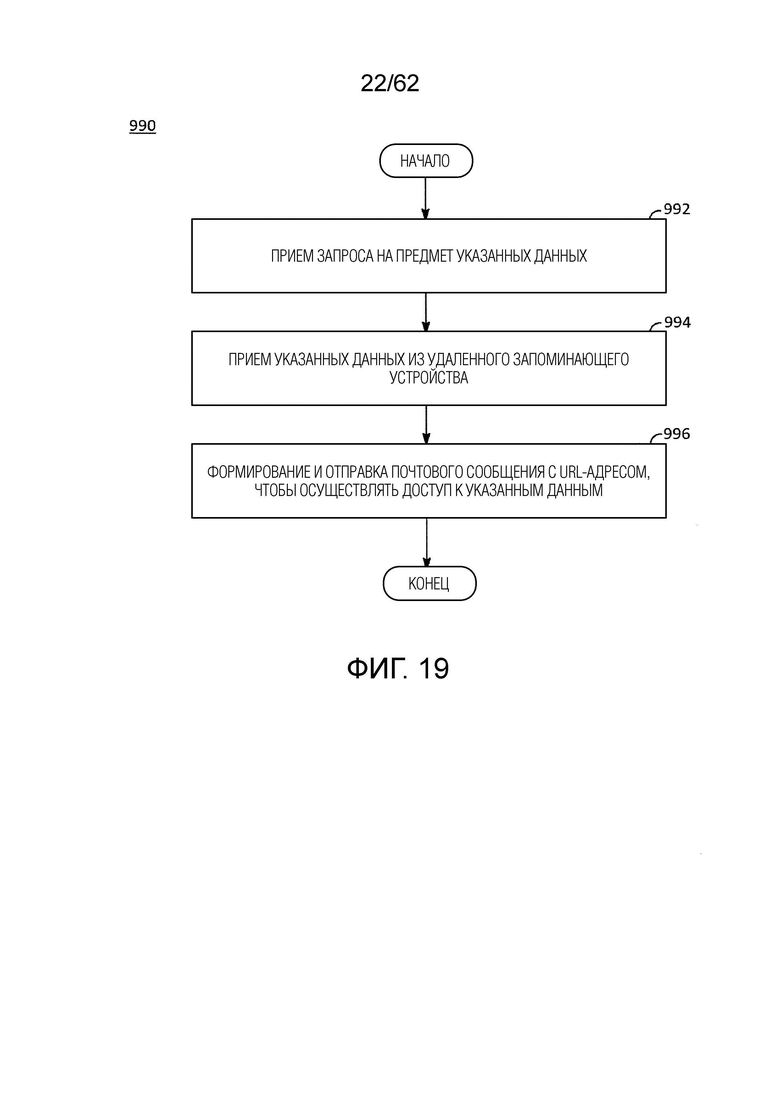
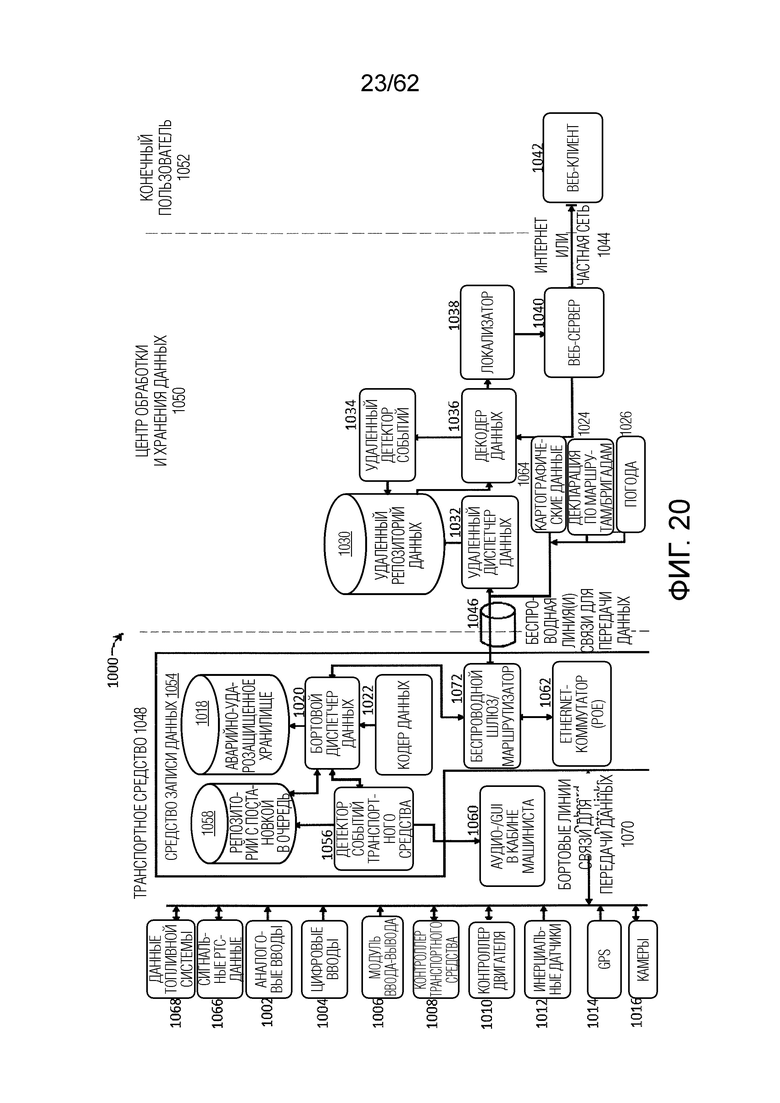
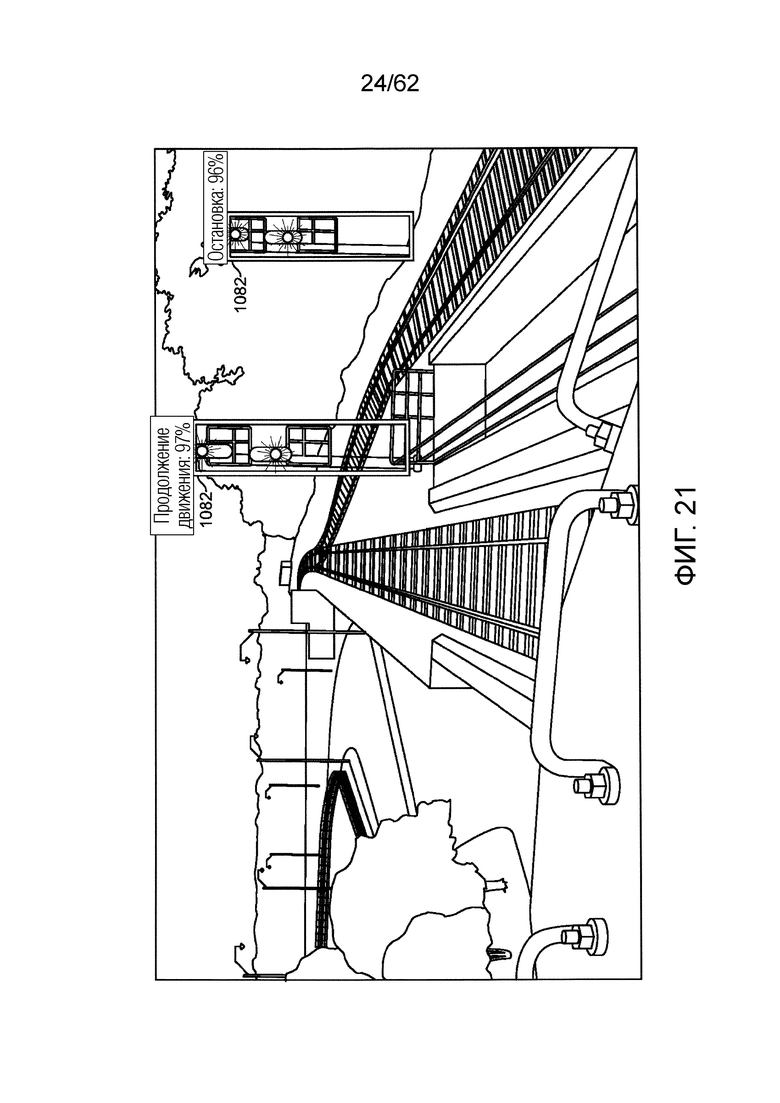
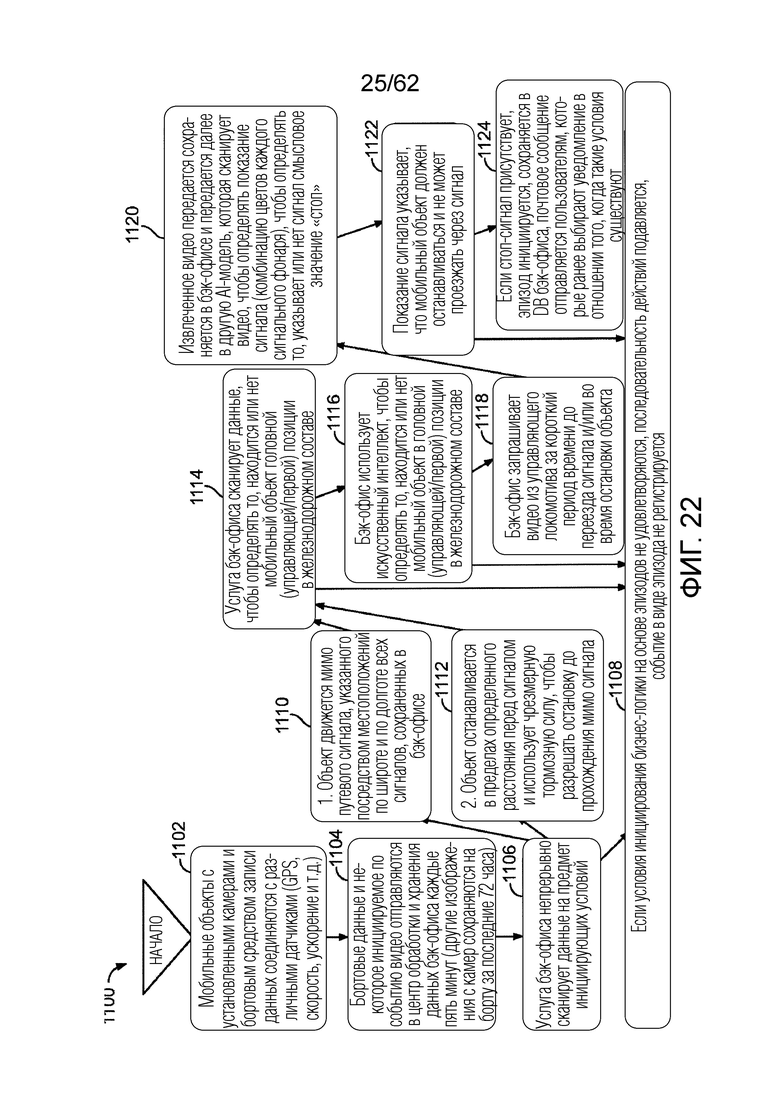
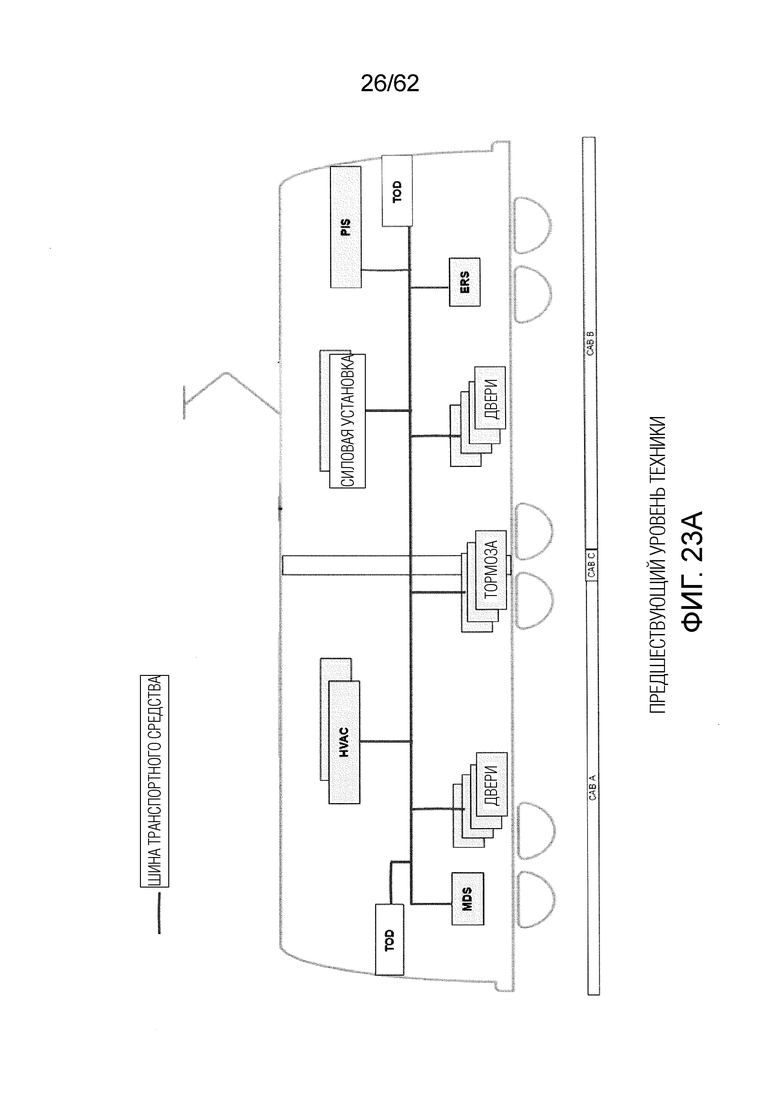

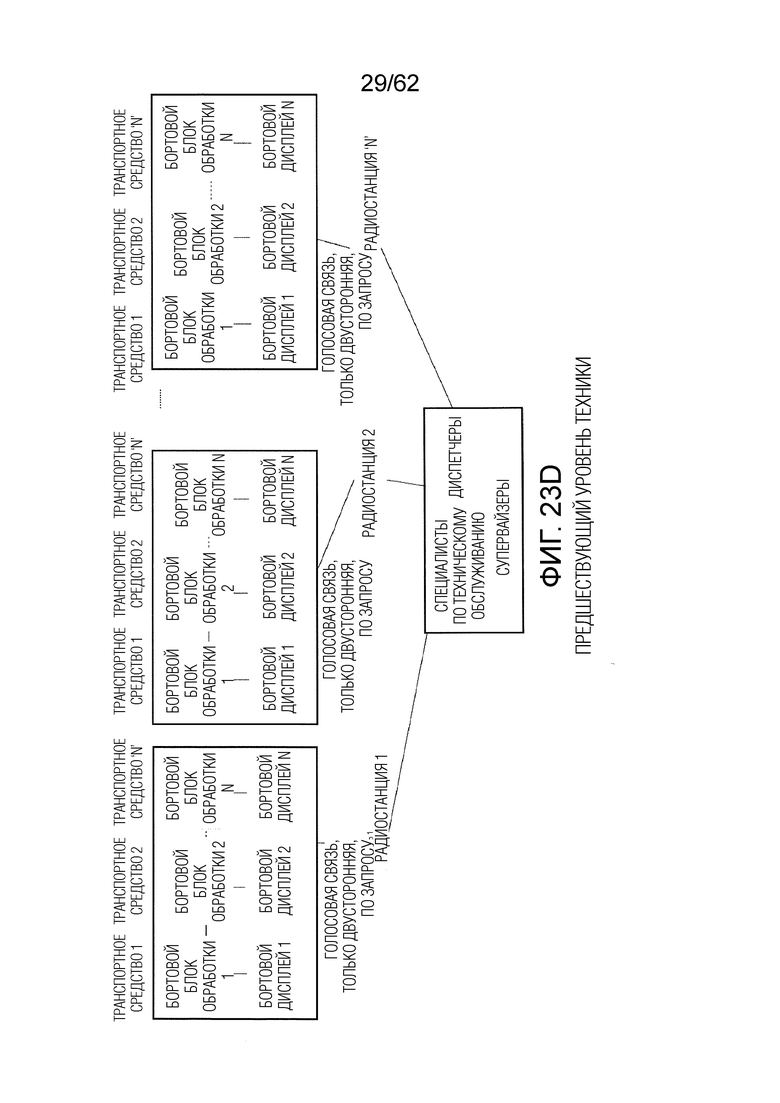
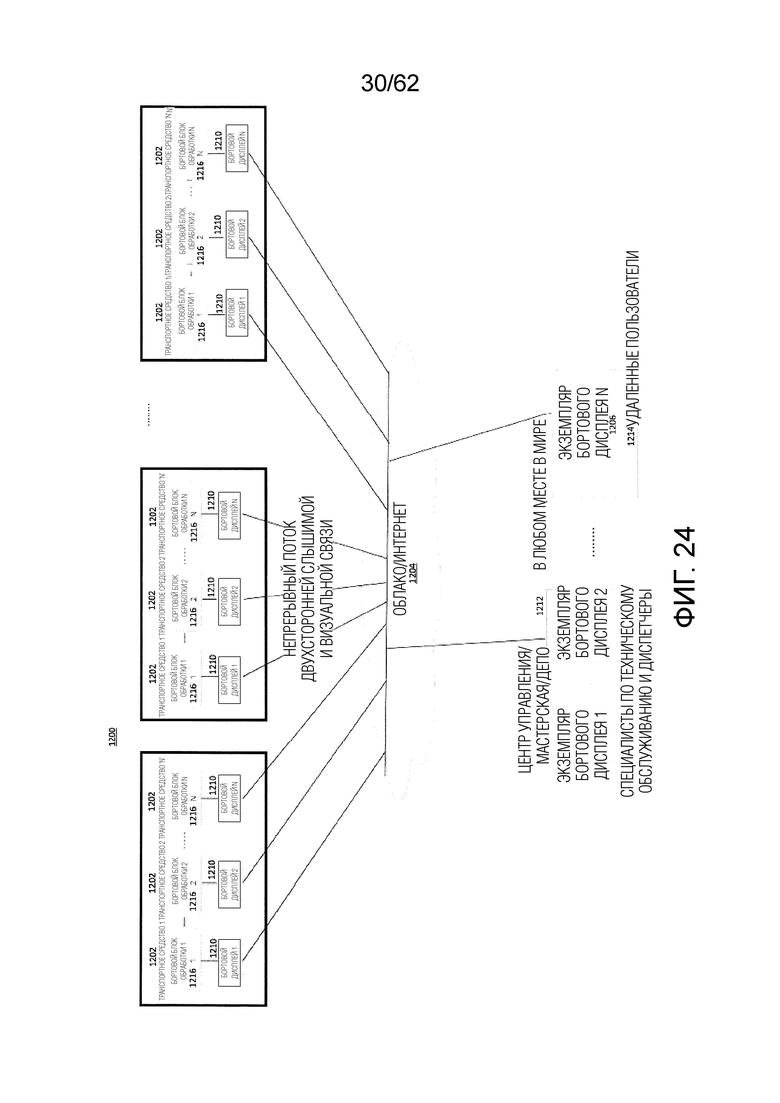
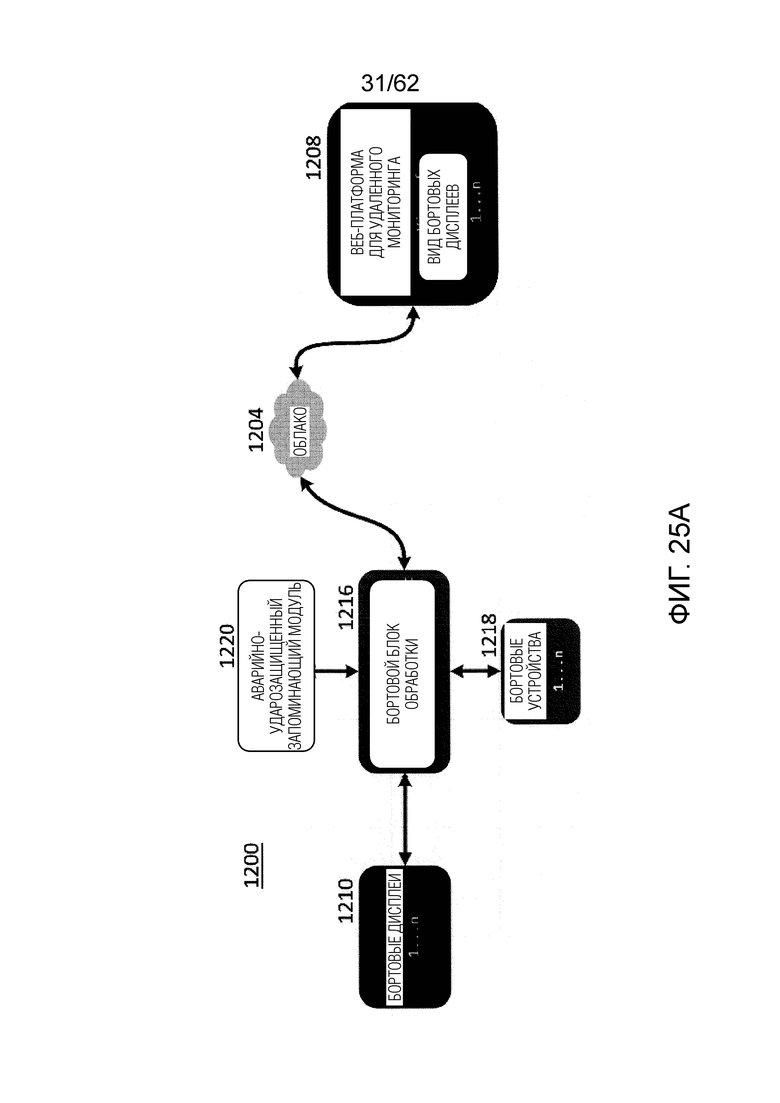
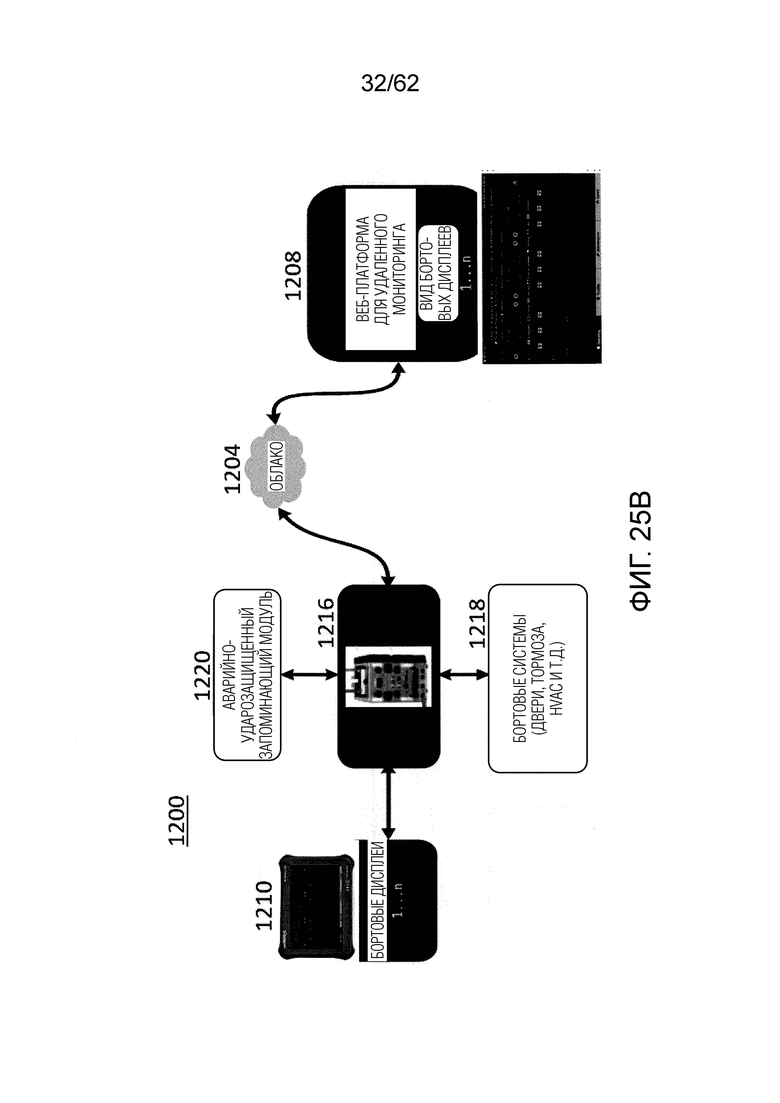
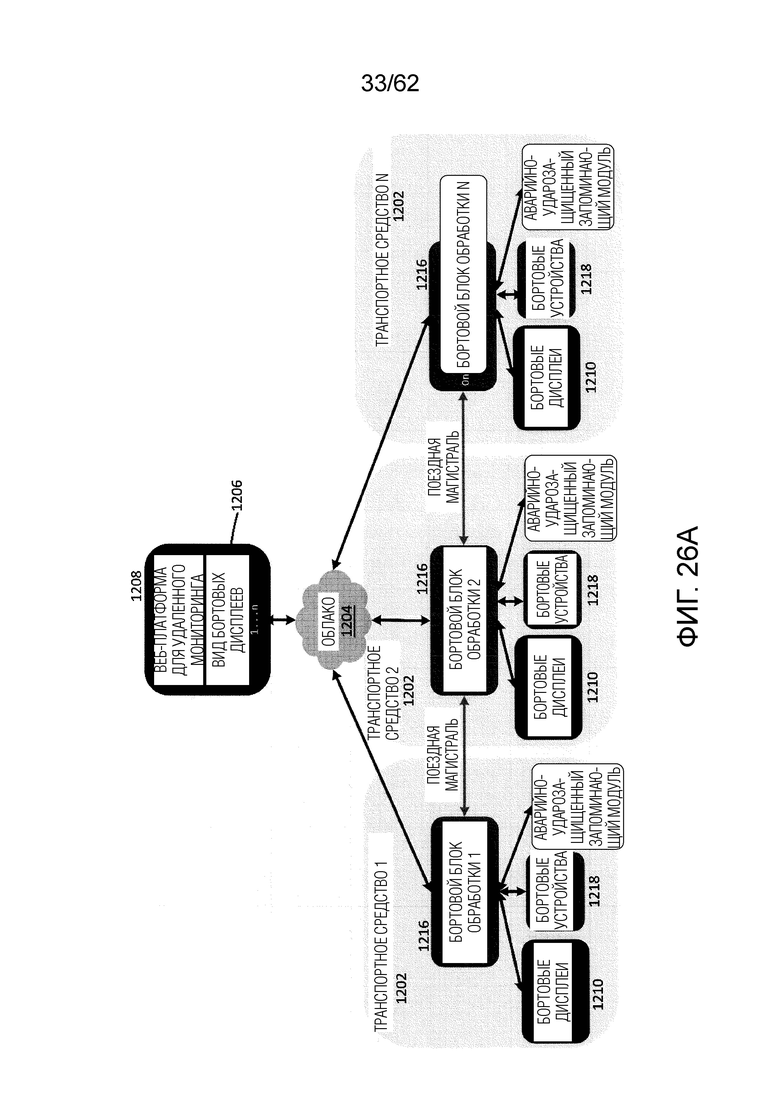
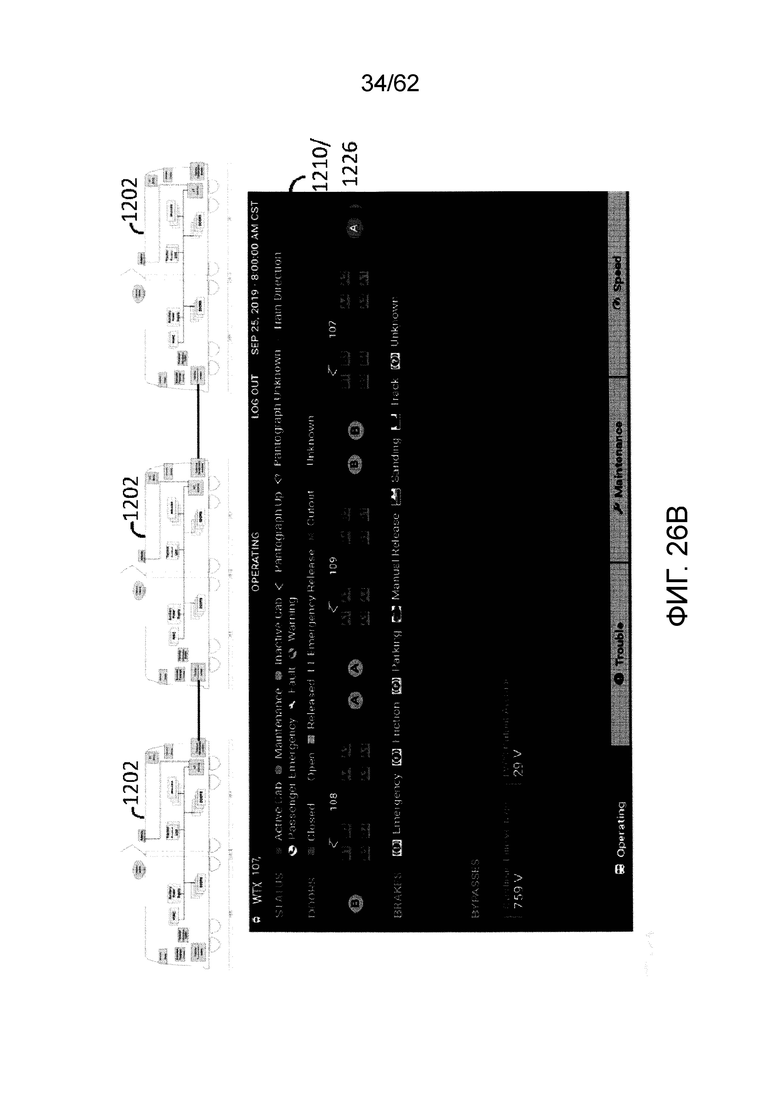
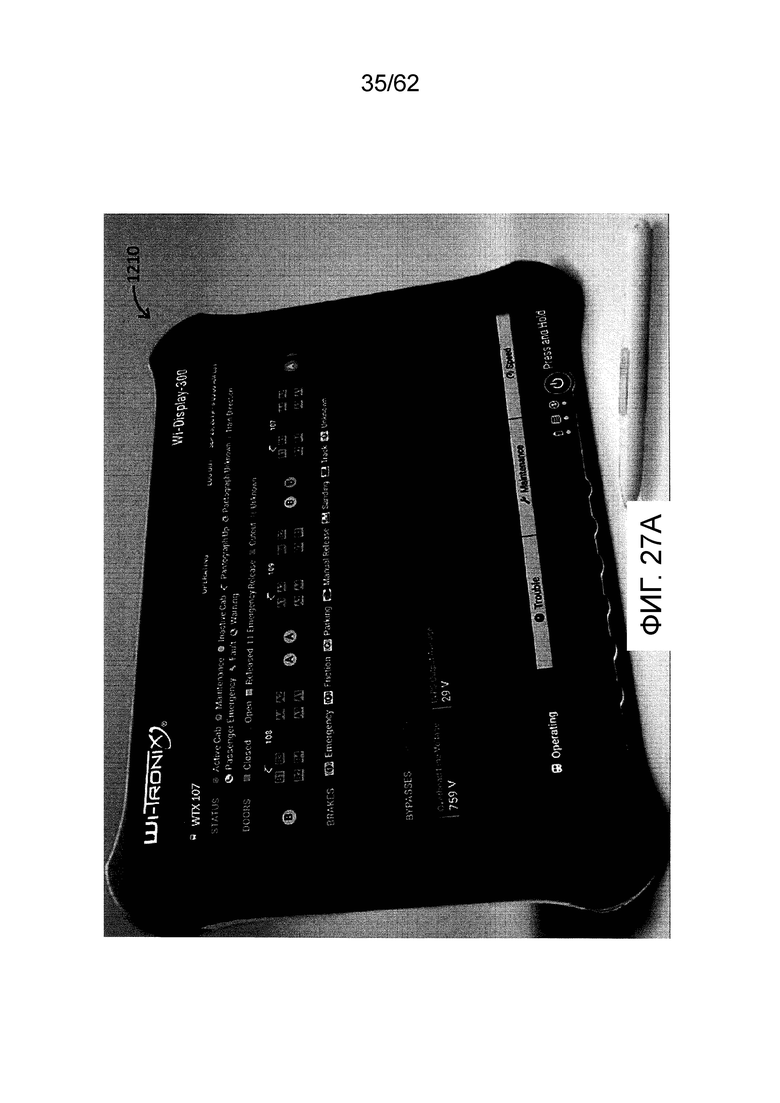
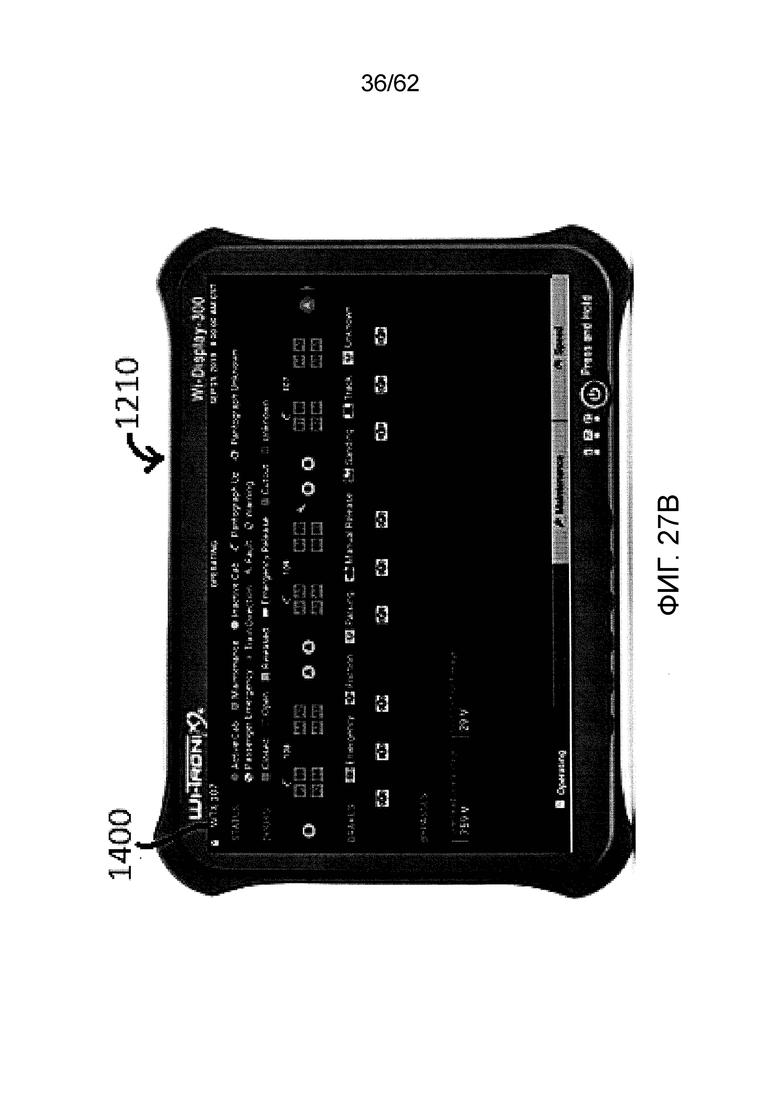
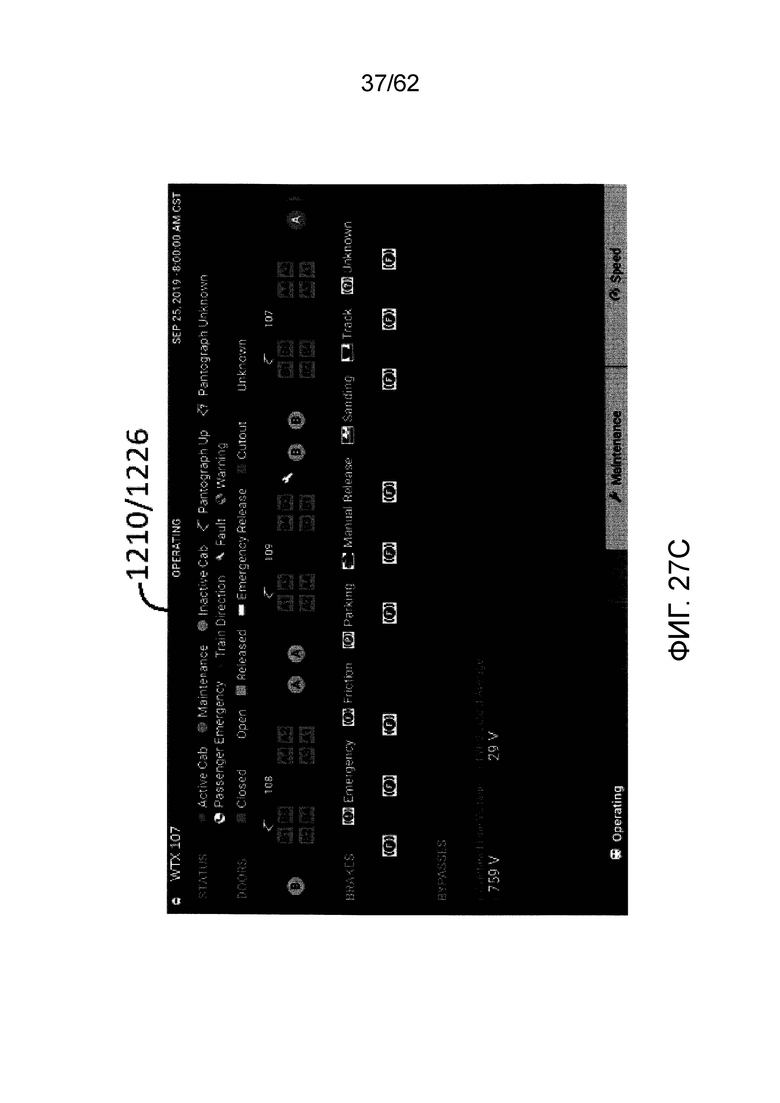
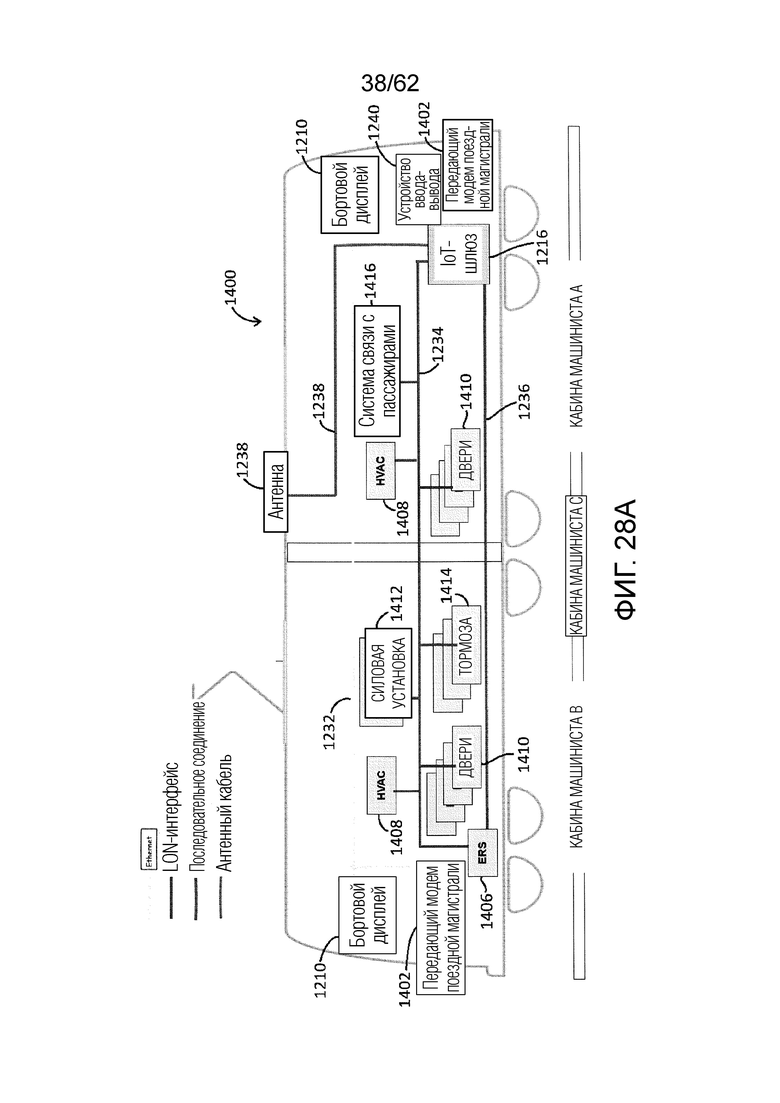
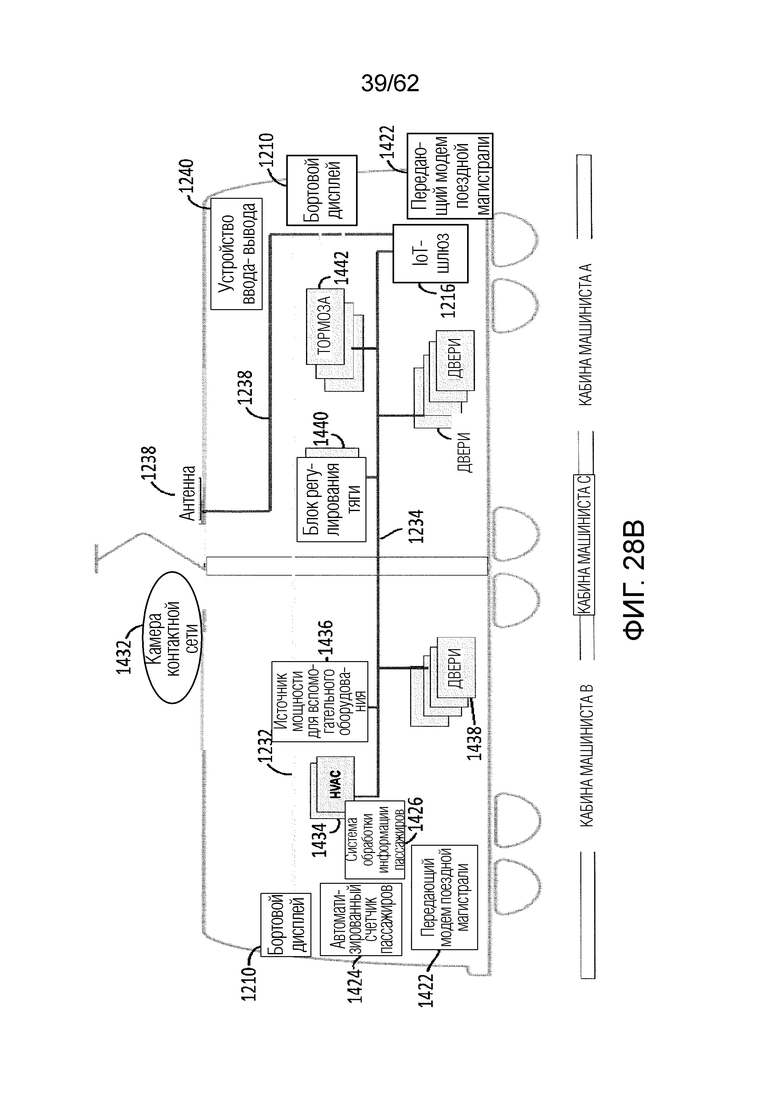
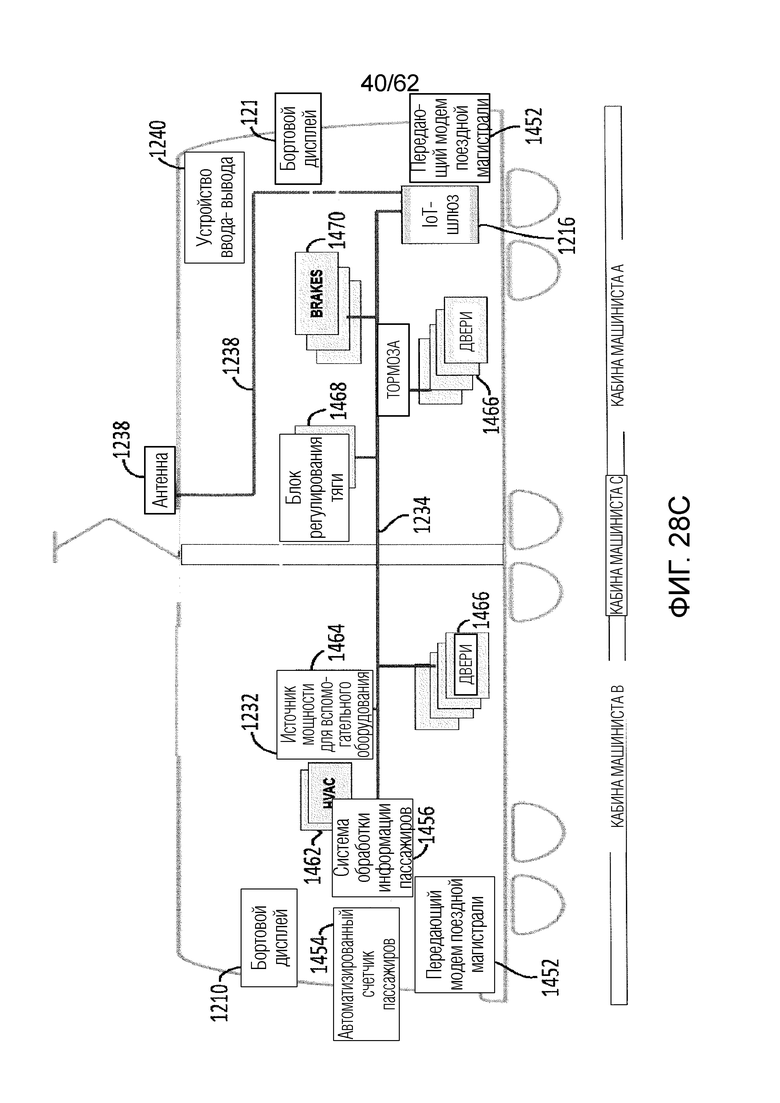
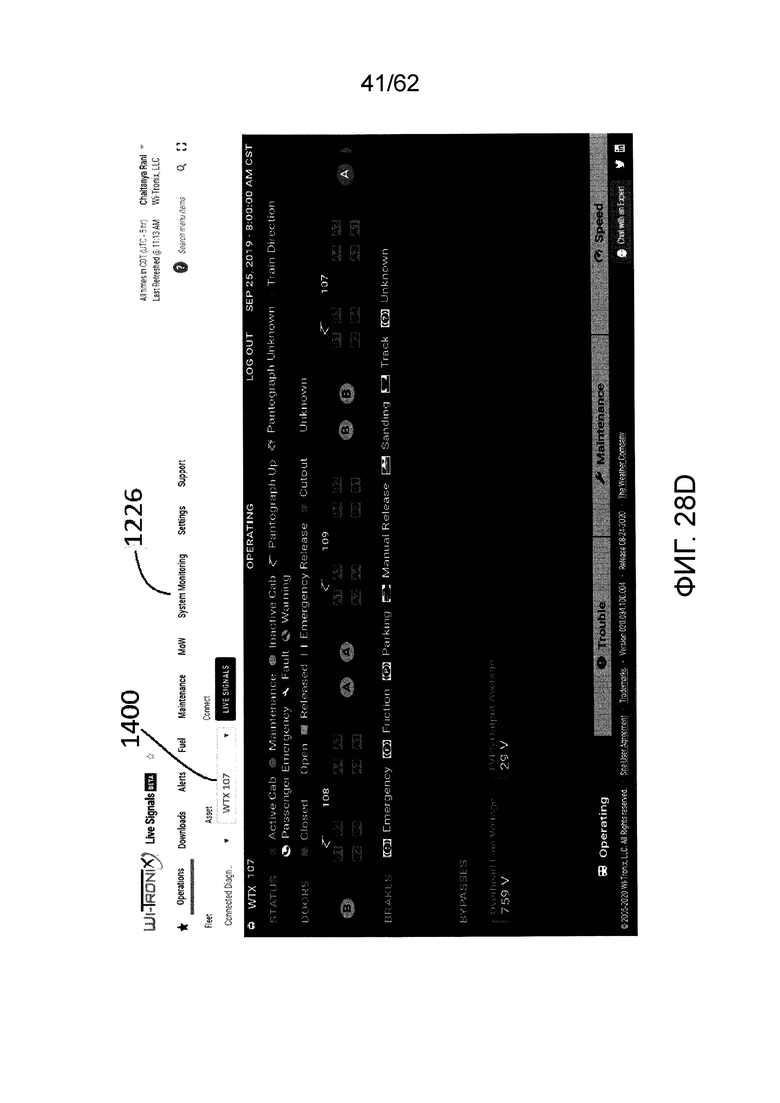
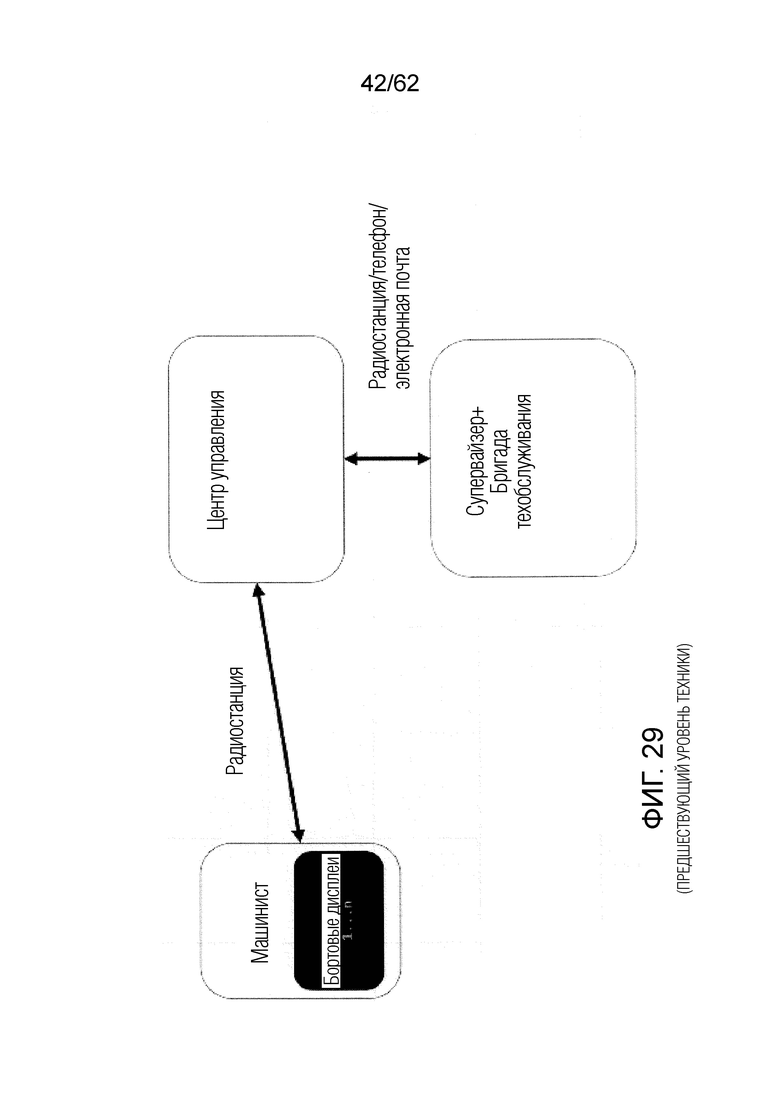
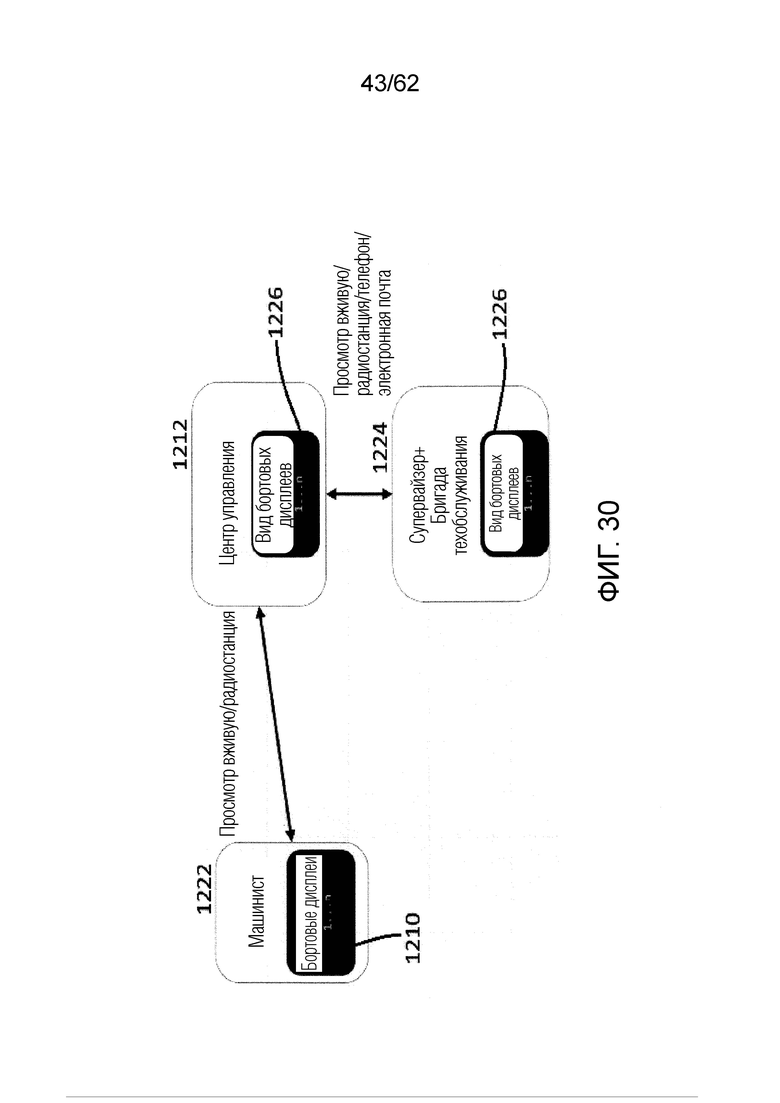
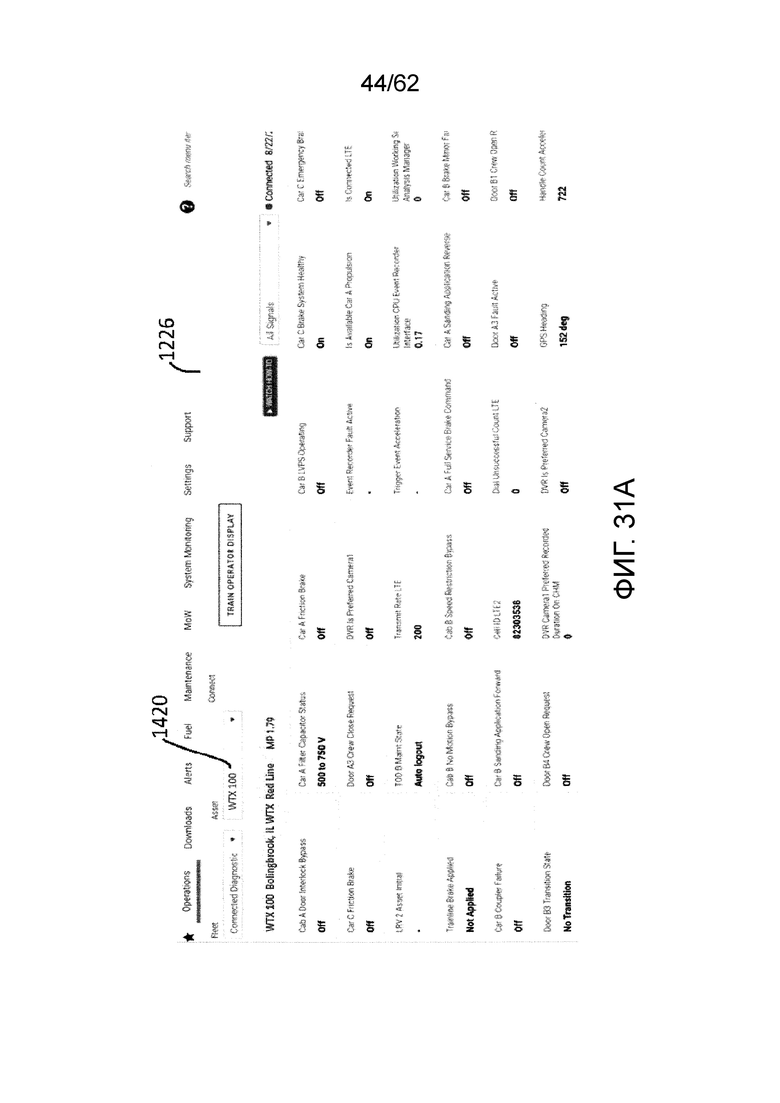
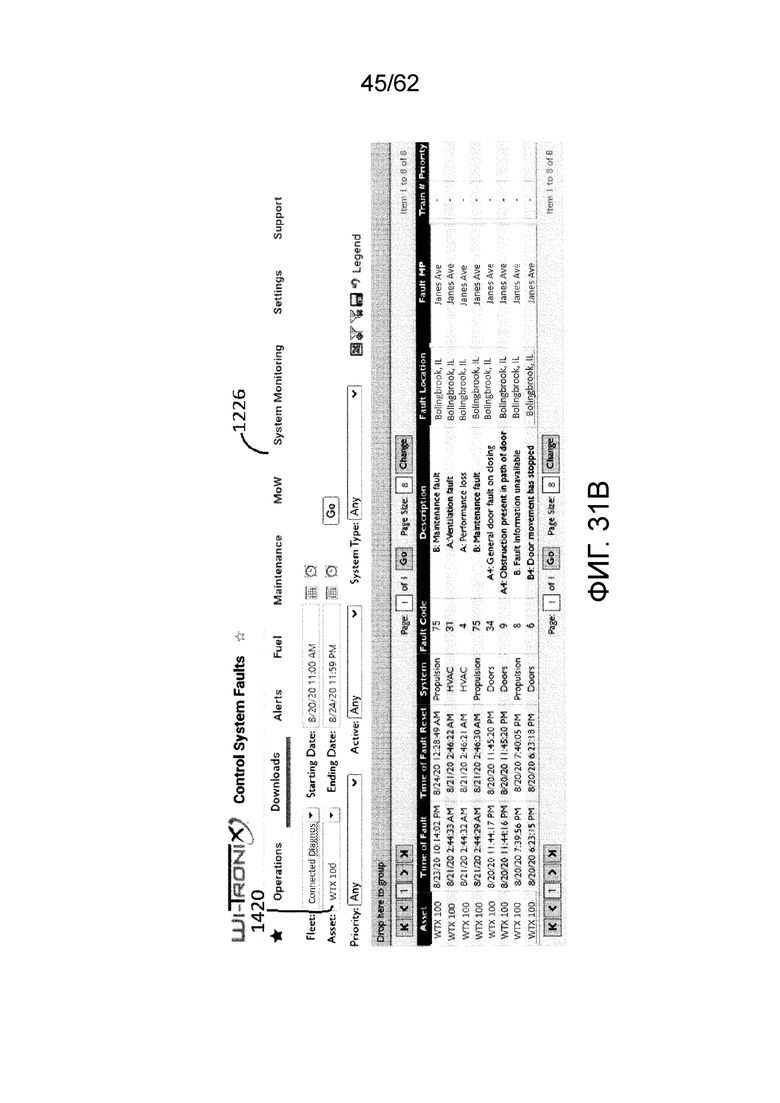
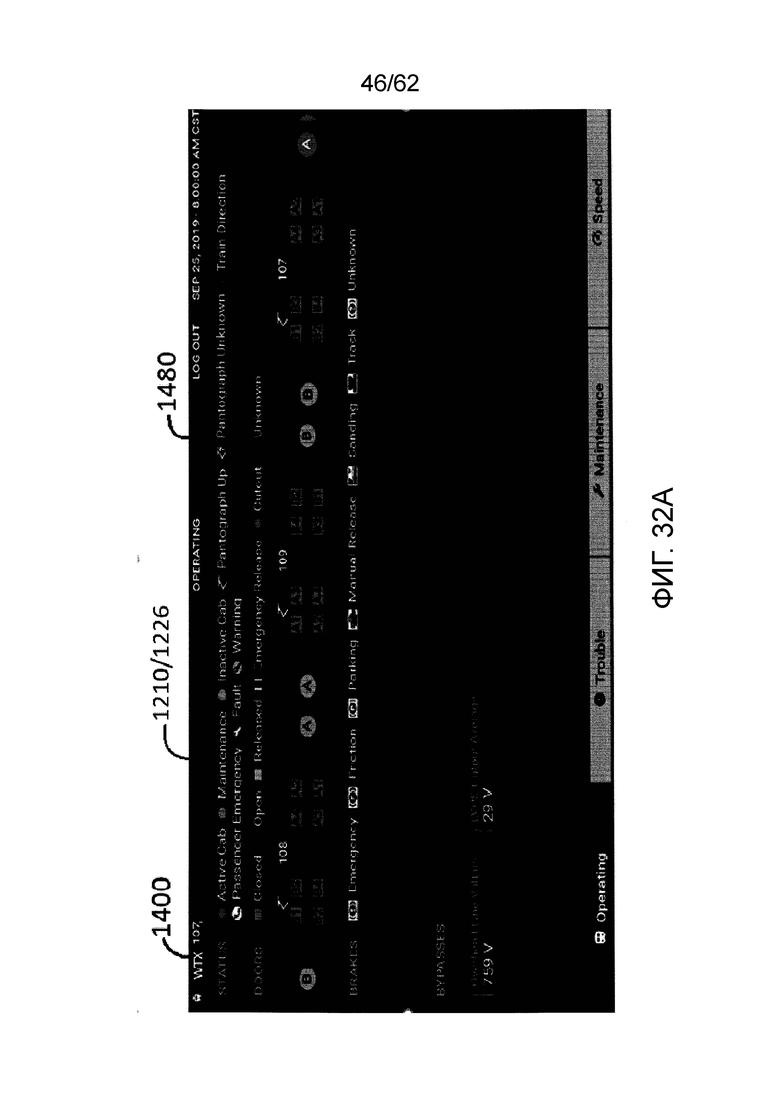
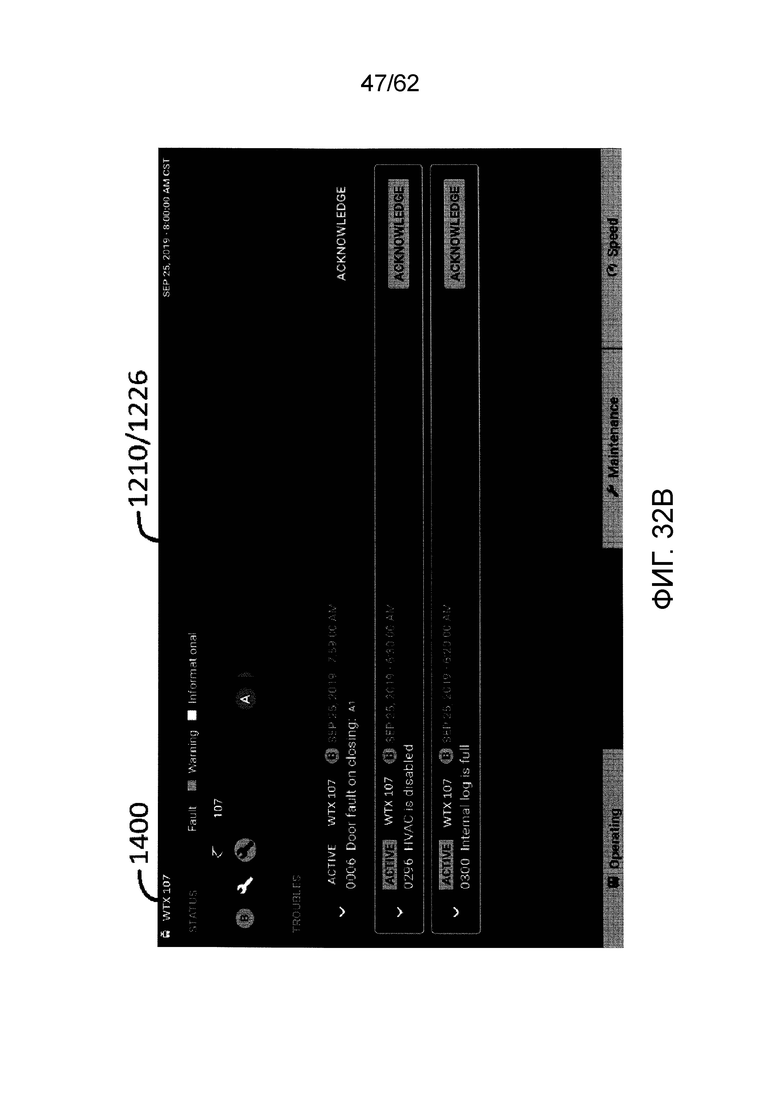
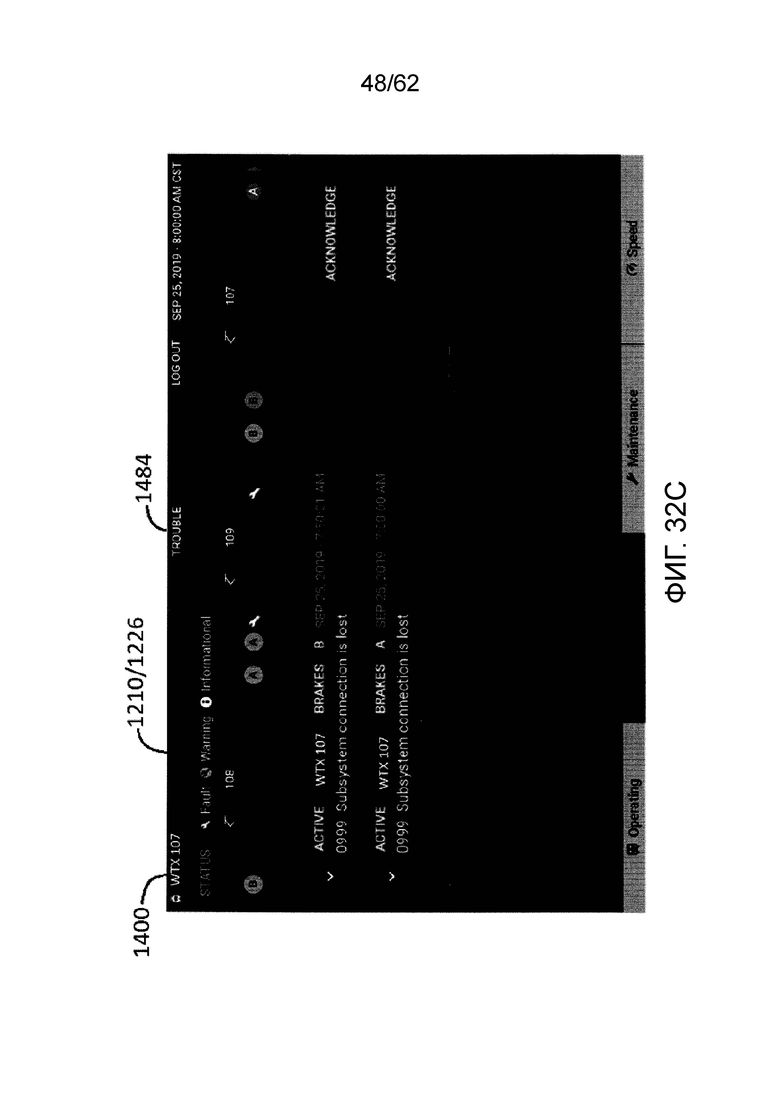
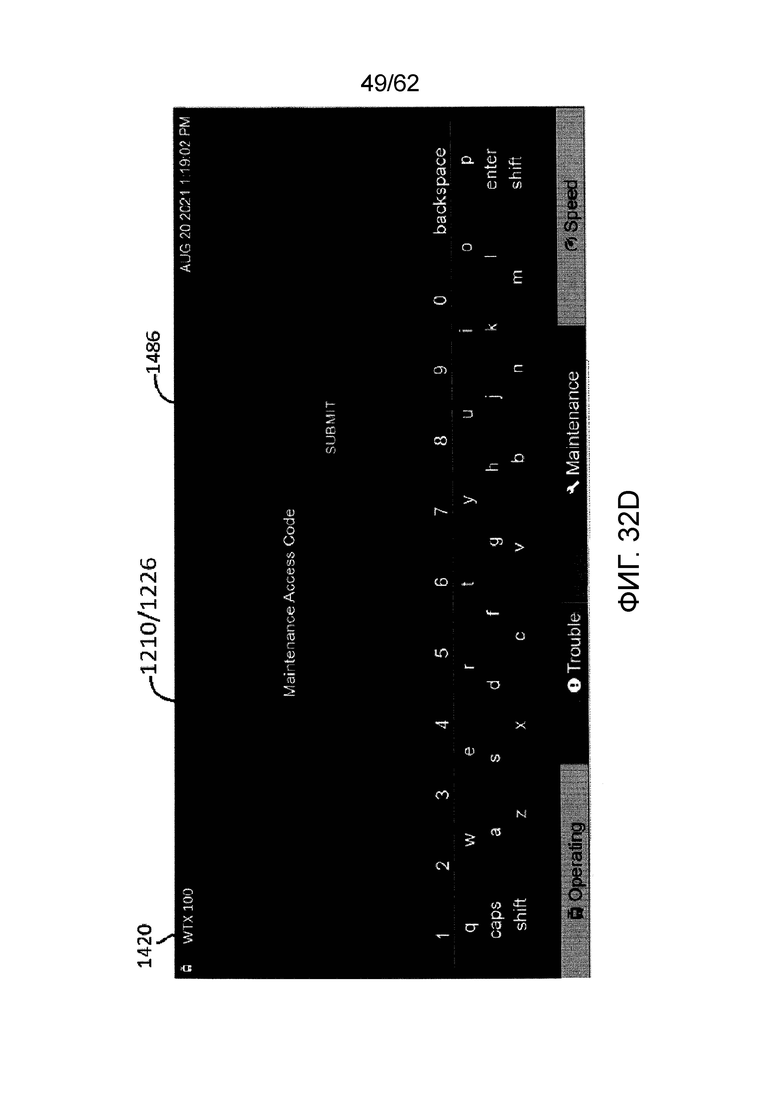
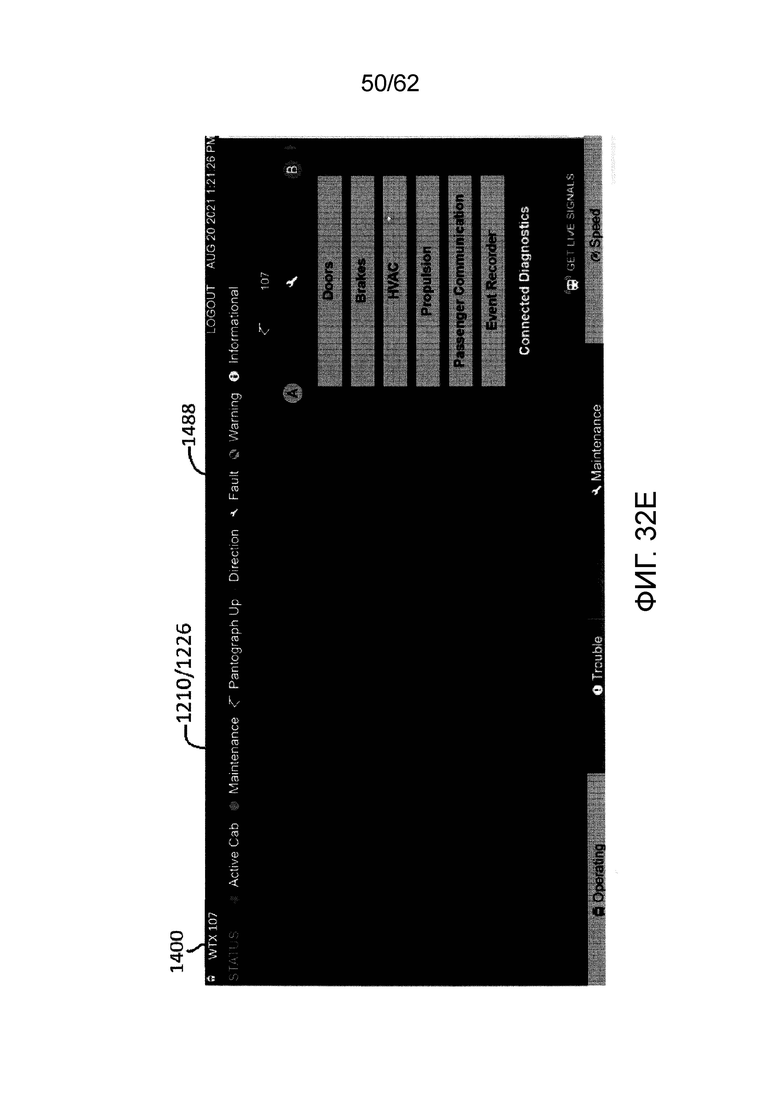
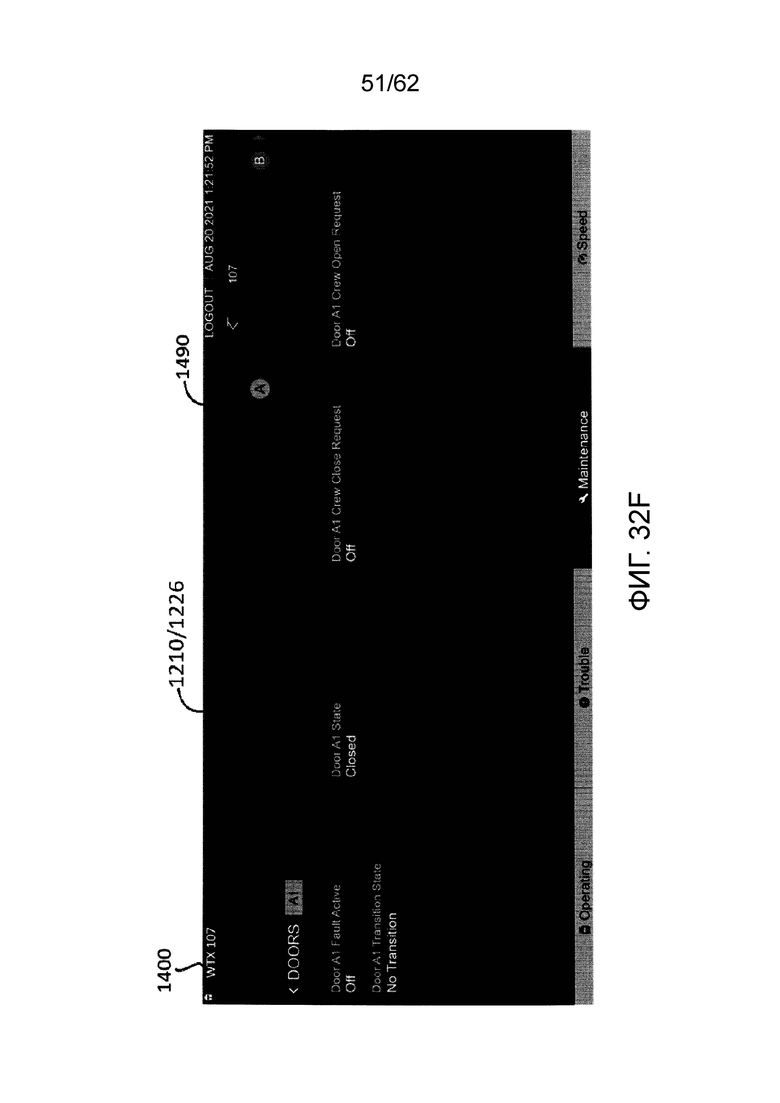
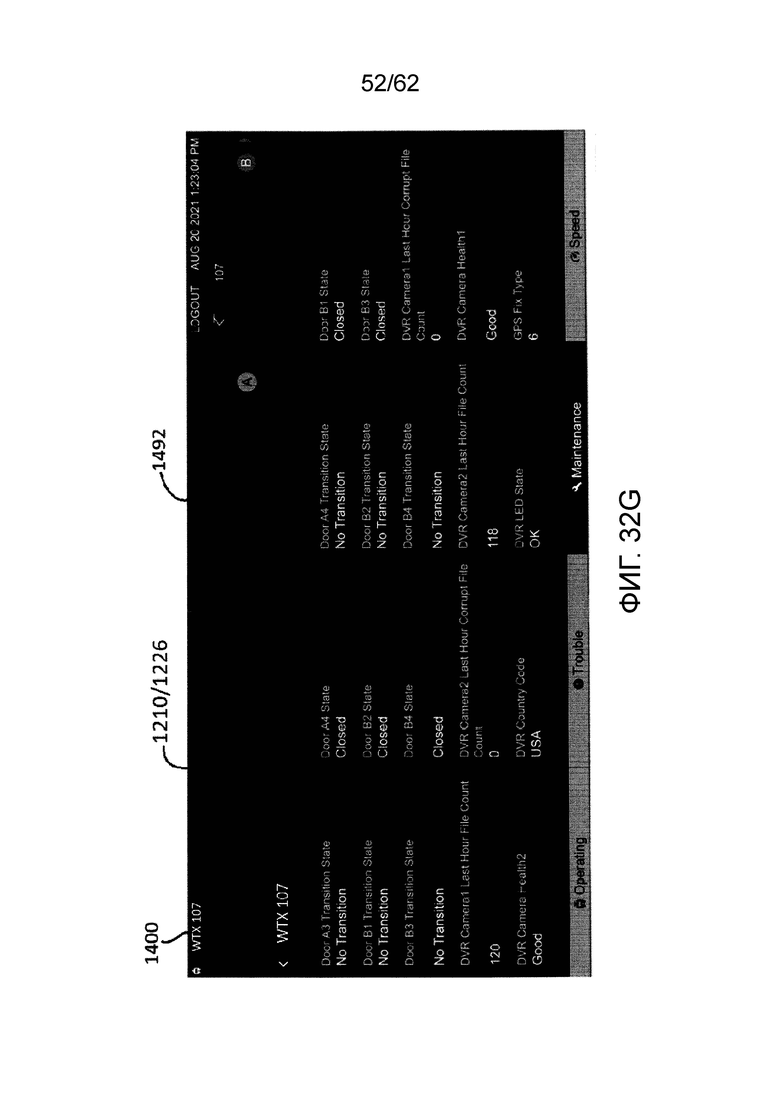
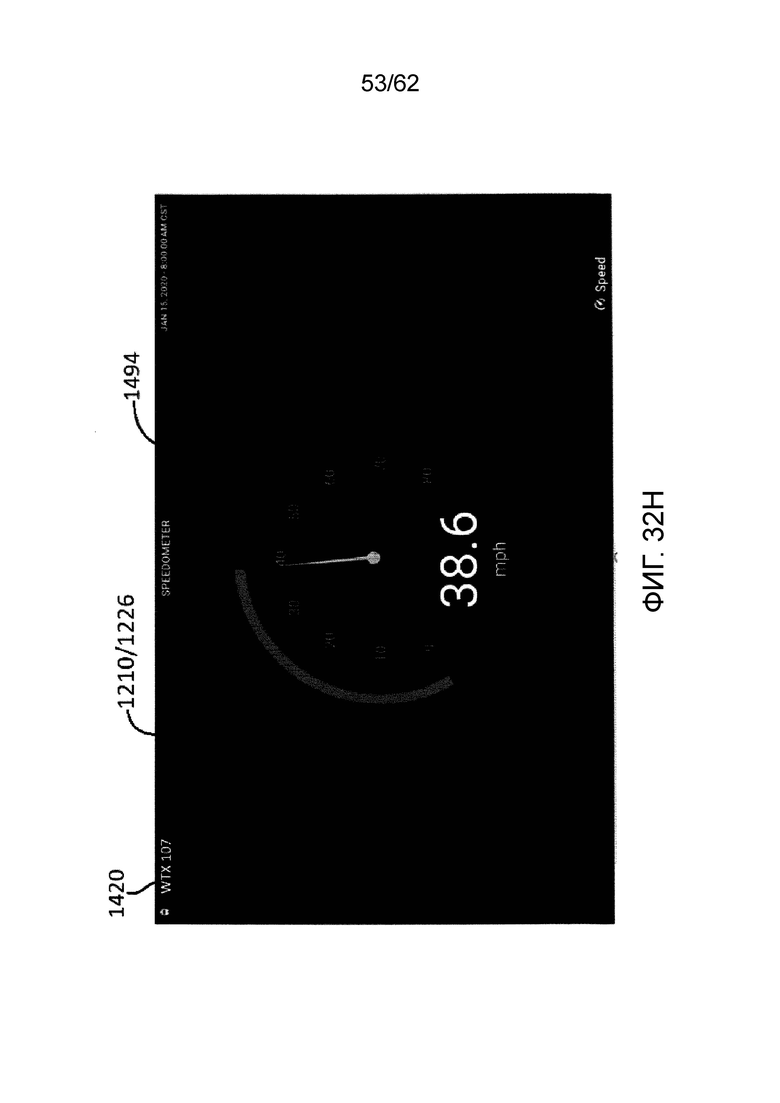
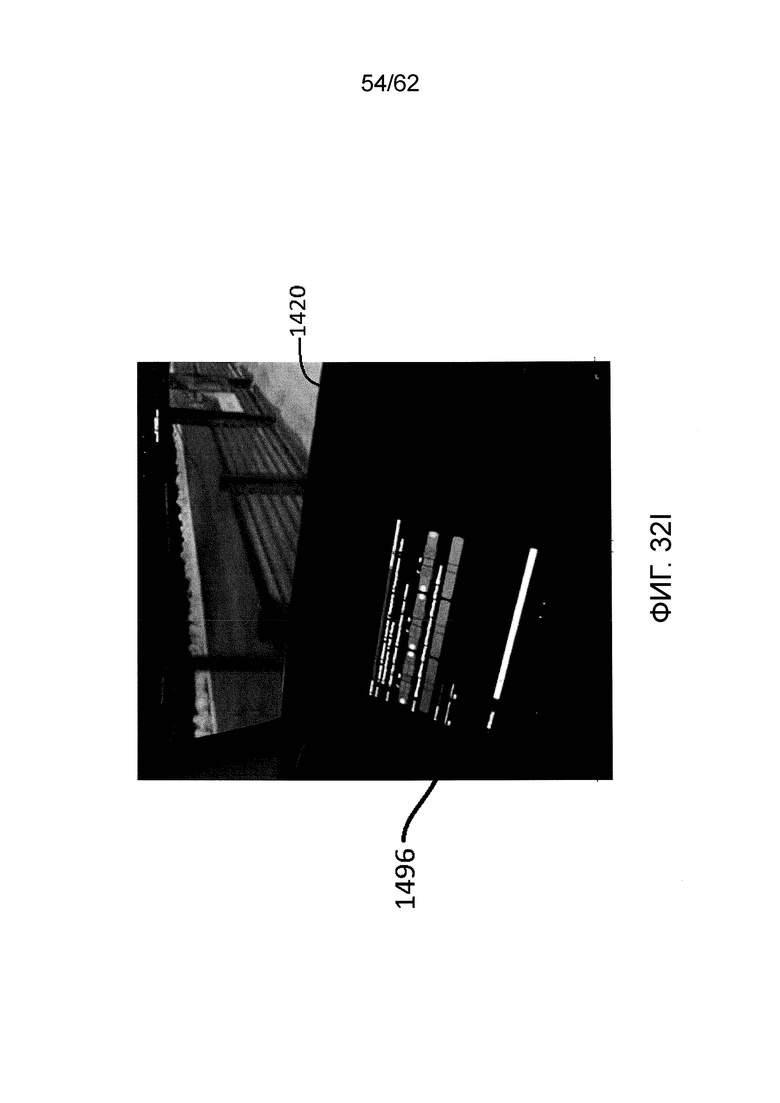
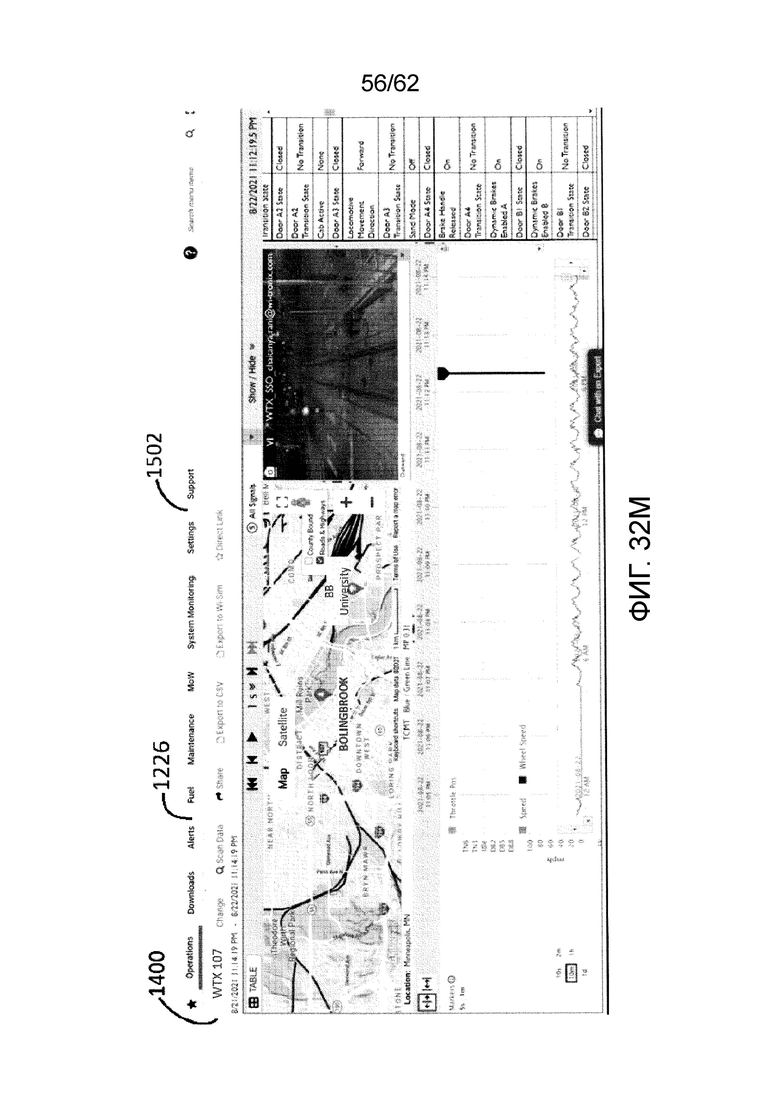
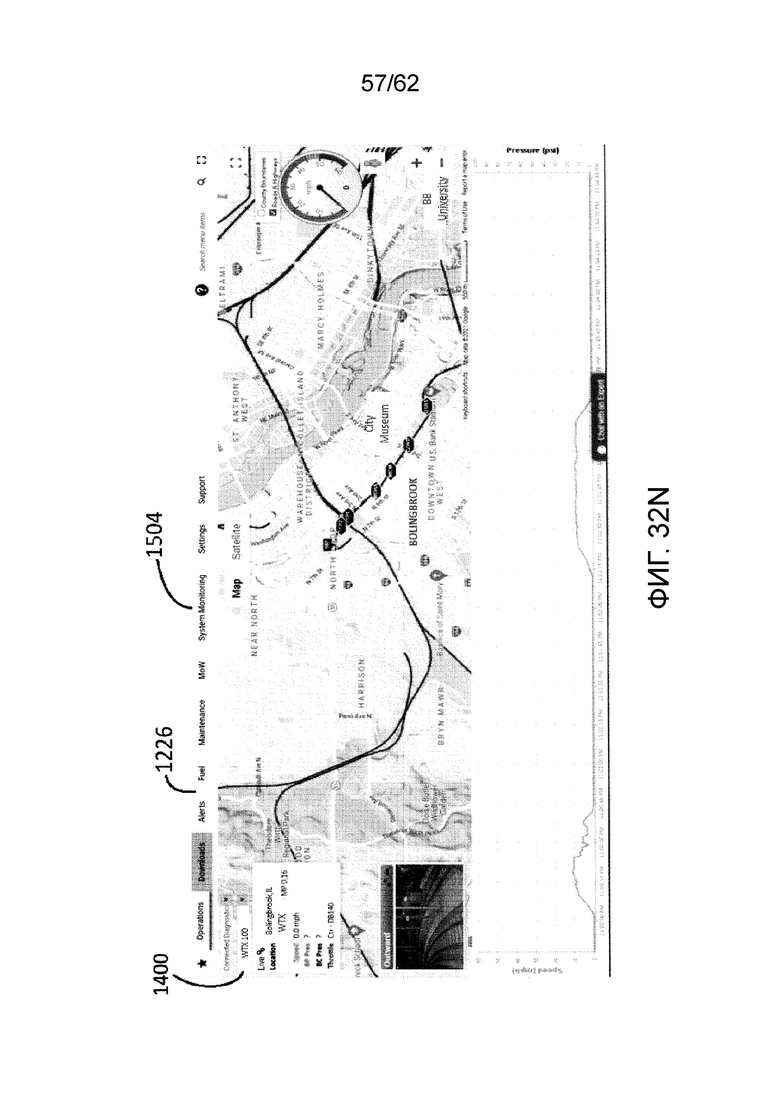
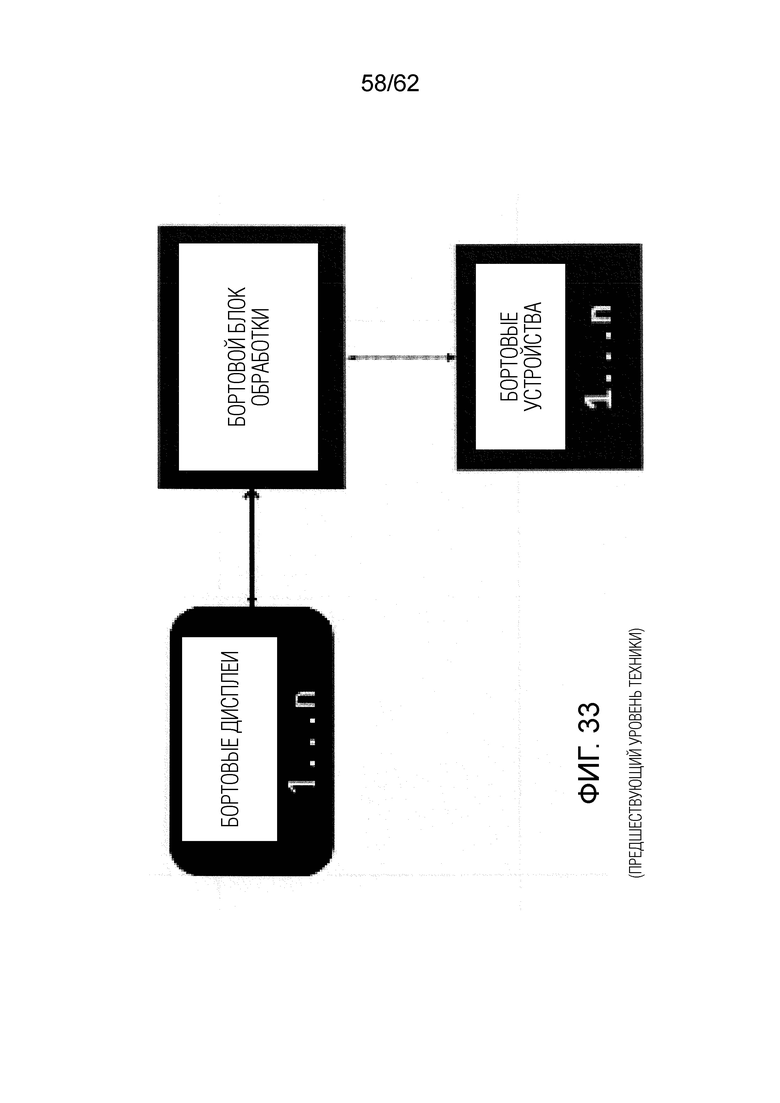
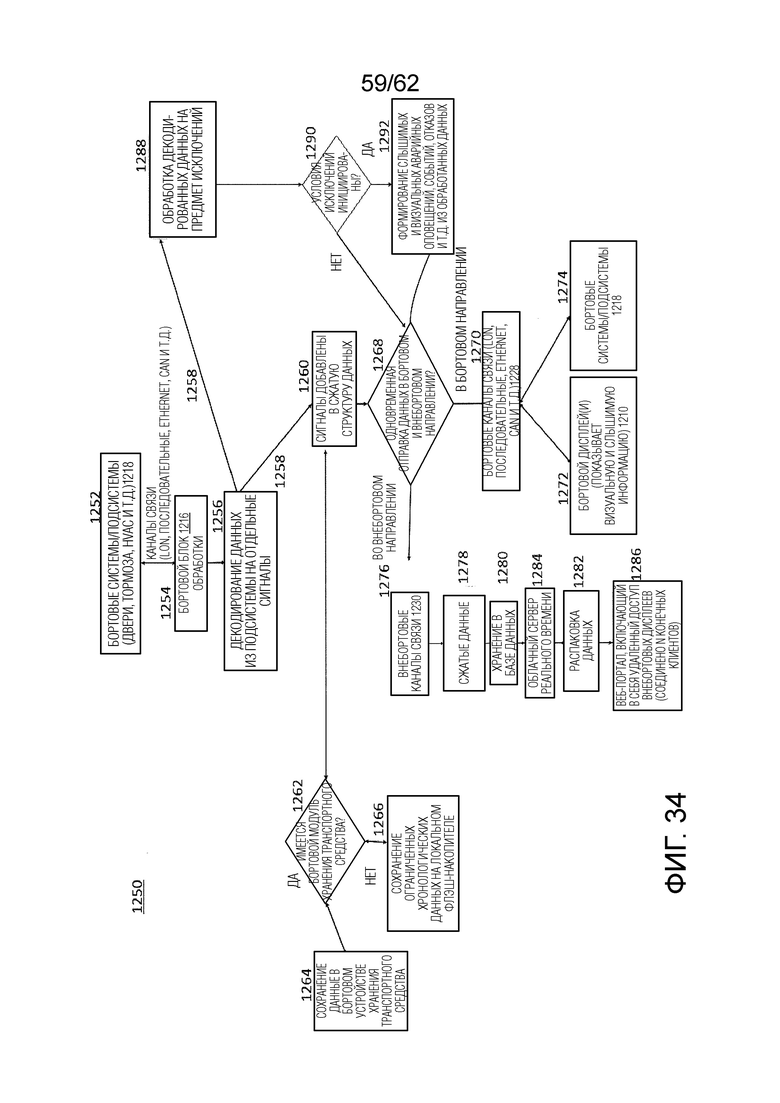
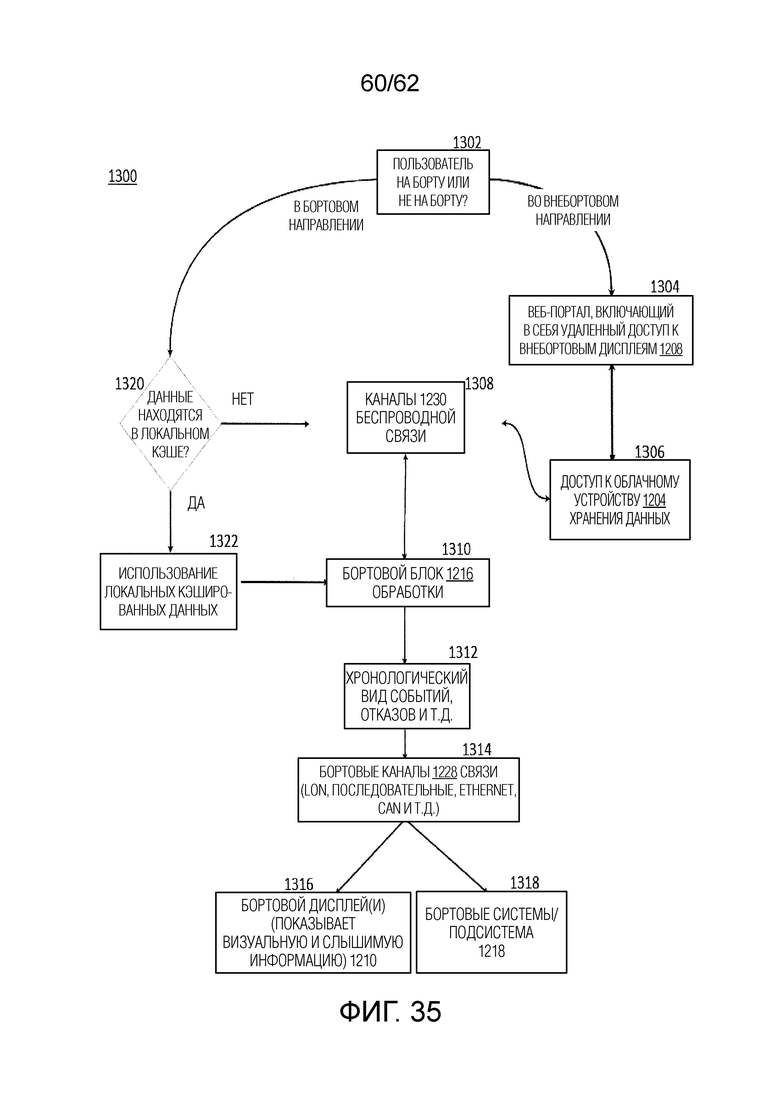
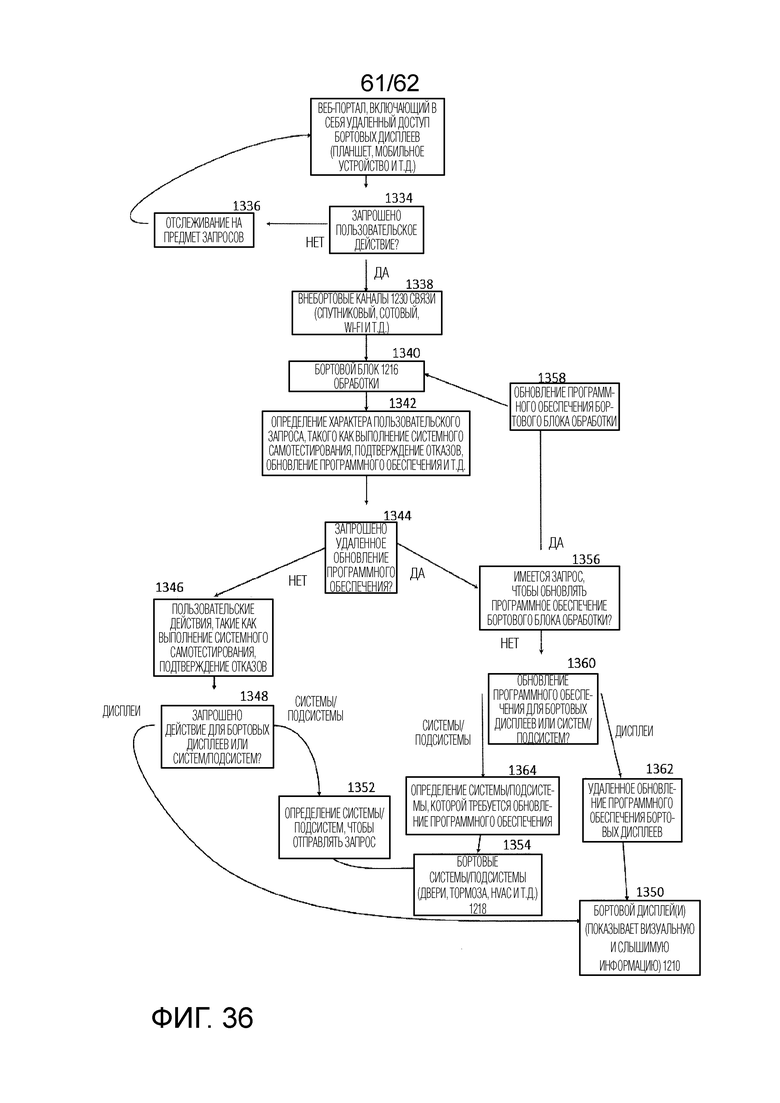
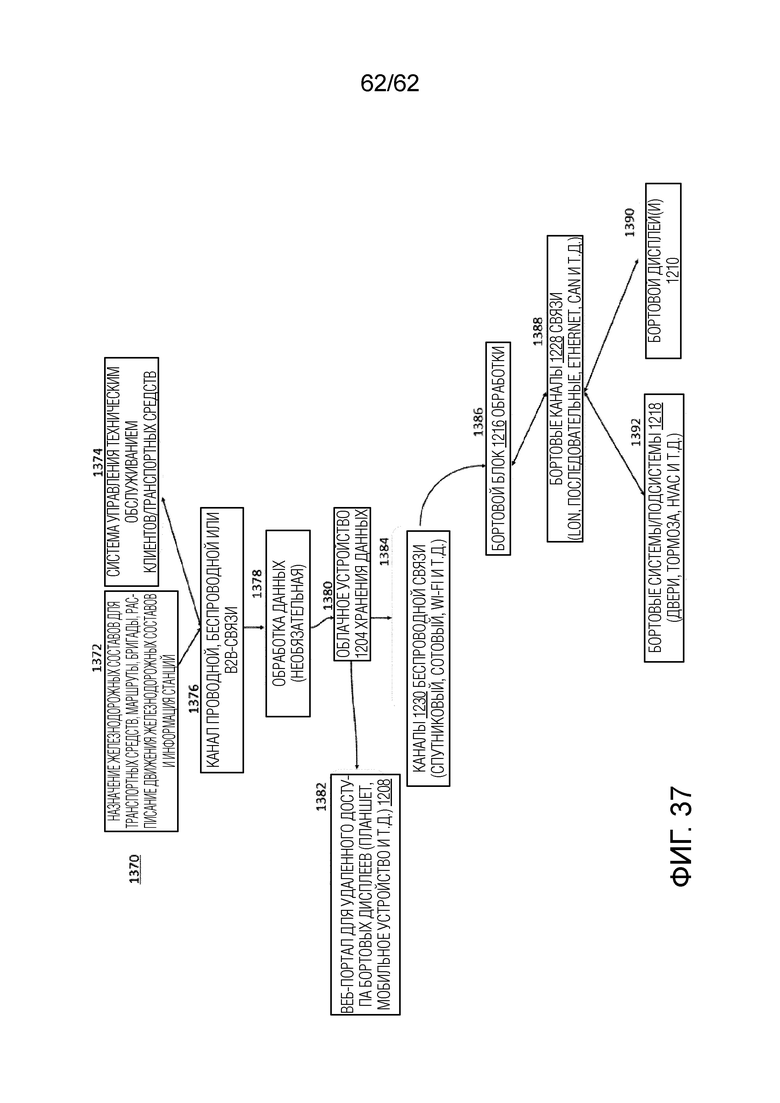
Изобретение относится к области вычислительной техники, а именно к системам и способам сбора, обработки и передачи информации. Технический результат заключается в повышении надежности хранения данных за счет их дублирования на удаленной платформе. Технический результат достигается за счет выполнения этапов, на которых: принимают данные одного сигнала от источника данных на борту подвижного объекта или источника данных, удаленного от подвижного объекта, или бортовой системы на борту подвижного объекта или бортовой подсистемы на борту подвижного объекта; декодируют данные; сжимают, используя кодер данных на борту подвижного объекта; и отправляют с использованием по меньшей мере одного из каналов связи, либо данные на бортовой дисплей оператора на борту подвижного объекта или человеко-машинный интерфейс бортовой системы или бортовой подсистемы подвижного объекта, либо сжатую структуру данных на удаленную платформу, при условии, что удаленно расположенный пользователь запросил одно из: данных, декодированных данных и сжатой структуры данных. 3 н. и 32 з.п. ф-лы, 68 ил.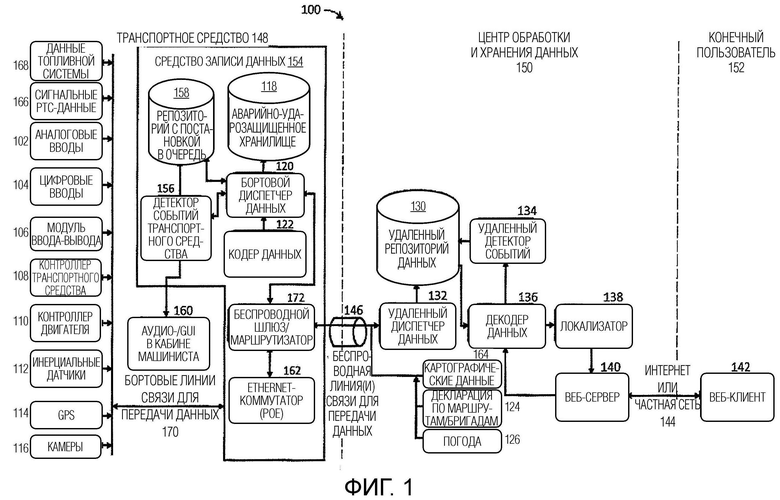
1. Способ обработки, сохранения и передачи данных от по меньшей мере одного подвижного объекта, содержащий этапы, на которых:
принимают, с использованием бортового блока обработки на борту по меньшей мере одного подвижного объекта, данные на основе по меньшей мере одного сигнала данных из по меньшей мере одного из следующего:
- по меньшей мере одного источника данных на борту по меньшей мере одного подвижного объекта,
- по меньшей мере одного источника данных, удаленного от по меньшей мере одного подвижного объекта,
- по меньшей мере одной бортовой системы на борту по меньшей мере одного подвижного объекта и
- по меньшей мере одной бортовой подсистемы на борту по меньшей мере одного подвижного объекта;
декодируют данные в декодированные данные;
сжимают, используя кодер данных на борту по меньшей мере одного подвижного объекта, по меньшей мере одно из данных и декодированных данных в сжатую структуру данных; и
отправляют, с использованием по меньшей мере одного из по меньшей мере одного бортового канала связи, канала проводной связи и канала беспроводной связи, по меньшей мере одно из:
- по меньшей мере одно из данных, декодированных данных и сжатой структуры данных на по меньшей мере одно из бортового дисплея оператора на борту по меньшей мере одного подвижного объекта, человеко-машинного интерфейса на борту по меньшей мере одного подвижного объекта, по меньшей мере одной бортовой системы и по меньшей мере одной бортовой подсистемы и
- сжатой структуры данных на по меньшей мере одну удаленную платформу, удаленную от по меньшей мере одного подвижного объекта, одновременно при условии, что удаленно расположенный пользователь запросил по меньшей мере одно из данных, декодированных данных и сжатой структуры данных.
2. Способ по п. 1, дополнительно содержащий этап, на котором сохраняют по меньшей мере одно из данных, декодированных данных и сжатой структуры данных в по меньшей мере одном локальном запоминающем компоненте на борту по меньшей мере одного подвижного объекта.
3. Способ по п. 1, дополнительно содержащий этап, на котором сохраняют по меньшей мере одно из данных, декодированных данных и сжатой структуры данных в по меньшей мере одном локальном запоминающем компоненте на борту по меньшей мере одного подвижного объекта, причем по меньшей мере один локальный запоминающий компонент содержит по меньшей мере одно из автономного аварийно-ударозащищенного запоминающего модуля, интегрированного аварийно-ударозащищенного запоминающего модуля, неаварийно-ударозащищенного запоминающего устройства, съемного устройства хранения данных и локального устройства хранения данных.
4. Способ по п. 1, дополнительно содержащий этапы, на которых:
отображают, с использованием по меньшей мере одного из бортового дисплея оператора и человеко-машинного интерфейса, по меньшей мере одно из данных, декодированных данных и сжатой структуры данных при условии, что по меньшей мере одно из данных, декодированных данных и сжатой структуры данных были отправлены на по меньшей мере одно из бортового дисплея оператора и человеко-машинного интерфейса; и
отображают, с использованием веб-средства просмотра на связи с удаленной платформой, сжатую структуру данных при условии, что сжатая структура данных отправлена на удаленную платформу.
5. Способ по п. 1, дополнительно содержащий этапы, на которых:
идентифицируют, с использованием бортового блока обработки, предварительно заданное событие на основе декодированных данных при условии возникновения этого предварительно заданного события, затрагивающего по меньшей мере один подвижный объект; и
отображают, используя по меньшей мере одно из бортового дисплея оператора и человеко-машинного интерфейса, предварительно заданное событие и по меньшей мере одно из слышимого аварийного оповещения, визуального аварийного оповещения и обработки на естественном языке.
6. Способ по п. 1, дополнительно содержащий этапы, на которых:
сохраняют, используя облачный сервер реального времени, сжатую структуру данных на удаленном устройстве хранения данных, удаленном от по меньшей мере одного подвижного объекта;
распаковывают, с использованием декодера данных, сжатую структуру данных в распакованные данные при условии, что сжатая структура данных была отправлена на облачный сервер реального времени;
отправляют, используя облачный сервер реального времени, распакованные данные на по меньшей мере одну удаленную платформу; и
отображают, с использованием веб-средства просмотра, осуществляющего связь с удаленной платформой, распакованные данные в реальном времени.
7. Способ по п. 4, в котором контент, отображаемый на по меньшей мере одном из бортового дисплея оператора и человеко-машинного интерфейса, является таким же, как контент, отображаемый на веб-средстве просмотра.
8. Способ по п. 5, дополнительно содержащий этап, на котором отображают, используя веб-средство просмотра на связи с удаленной платформой, упомянутое предварительно заданное событие и по меньшей мере одно из слышимого аварийного оповещения, визуального аварийного оповещения и обработки на естественном языке.
9. Способ по п. 5, дополнительно содержащий этап, на котором сохраняют по меньшей мере одно из данных, декодированных данных и сжатой структуры данных в по меньшей мере одном локальном запоминающем компоненте на борту по меньшей мере одного подвижного объекта одновременно с идентификацией упомянутого предварительно заданного события.
10. Способ по п. 5, дополнительно содержащий этап, на котором сравнивают, используя бортовой блок обработки, по меньшей мере одно из данных и декодированных данных с по меньшей мере одним из набора предварительно заданных правил и набора предварительно заданных пороговых значений, причем упомянутое предварительно заданное событие основывается на этом сравнении.
11. Способ по п. 10, в котором набор предварительно заданных правил и набор предварительно заданных пороговых значений являются конфигурируемыми пользователем.
12. Способ обработки, сохранения и передачи хронологических данных из по меньшей мере одного подвижного объекта, содержащий этапы, на которых:
принимают, используя бортовой блок обработки на борту по меньшей мере одного подвижного объекта, запрос на хронологические данные от по меньшей мере одного из по меньшей мере одного пользователя на борту по меньшей мере одного подвижного объекта и по меньшей мере одного пользователя, удаленного от по меньшей мере одного подвижного объекта;
получают, с использованием бортового блока обработки, хронологические данные;
отправляют, с использованием бортового блока обработки через по меньшей мере один из по меньшей мере одного бортового канала связи, канала проводной связи и канала беспроводной связи, хронологические данные на по меньшей мере одно из:
- бортового дисплея оператора на борту по меньшей мере одного подвижного объекта,
- человеко-машинного интерфейса на борту по меньшей мере одного подвижного объекта,
- по меньшей мере одной бортовой системы на борту по меньшей мере одного подвижного объекта,
- по меньшей мере одной бортовой подсистемы на борту по меньшей мере одного подвижного объекта и
- по меньшей мере одной удаленной платформы, удаленной от по меньшей мере одного подвижного объекта;
отображают, с использованием по меньшей мере одного из бортового дисплея оператора и человеко-машинного интерфейса, хронологические данные при условии, что запрос исходит от по меньшей мере одного пользователя на борту по меньшей мере одного подвижного объекта; и
отображают, используя веб-средство просмотра, находящееся на связи с по меньшей мере одной удаленной платформой, хронологические данные при условии, что запрос исходит от по меньшей мере одного пользователя, удаленного от по меньшей мере одного подвижного объекта.
13. Способ по п. 12, в котором хронологические данные получаются от по меньшей мере одного из по меньшей мере одной бортовой системы, по меньшей мере одной бортовой подсистемы и удаленного устройства хранения данных, удаленного от по меньшей мере одного подвижного объекта, при условии, что запрос исходит от по меньшей мере одного пользователя, удаленного от упомянутого по меньшей мере одного подвижного объекта.
14. Способ по п. 12, в котором хронологические данные получаются из по меньшей мере одного из:
локального кэша на борту по меньшей мере одного подвижного объекта при первом условии, что запрос исходит от по меньшей мере одного пользователя на борту по меньшей мере одного подвижного объекта, и при втором условии, что хронологические данные сохраняются в локальном кэше;
по меньшей мере одной бортовой системы при третьем условии, что запрос исходит от по меньшей мере одного пользователя на борту по меньшей мере оного подвижного объекта, и при четвертом условии, что хронологические данные хранятся в по меньшей мере одной бортовой системе;
по меньшей мере одной бортовой подсистемы при пятом условии, что запрос исходит от по меньшей мере одного пользователя на борту по меньшей мере оного подвижного объекта, и при шестом условии, что хронологические данные хранятся в по меньшей мере одной бортовой подсистеме; и
удаленного устройства хранения данных при седьмом условии, что запрос исходит от по меньшей мере одного пользователя на борту по меньшей мере одного подвижного объекта, и при восьмом условии, что хронологические данные не сохраняются в локальном кэше, по меньшей мере одной бортовой системе и по меньшей мере одной бортовой подсистеме.
15. Способ по п. 12, в котором хронологические данные содержат хронологический вид по меньшей мере одного из предварительно заданных событий и отказов.
16. Способ по п. 12, дополнительно содержащий этап, на котором отправляют, используя бортовой блок обработки, ответ в по меньшей мере одну из по меньшей мере одной бортовой системы и по меньшей мере одной бортовой подсистемы, причем ответ содержит по меньшей мере одно из хронологических данных, предварительно заданных событий, отказов и результатов самотестирования.
17. Система для обработки, сохранения и передачи данных из по меньшей мере одного подвижного объекта, содержащая:
бортовой блок обработки на борту по меньшей мере одного подвижного объекта, причем бортовой блок обработки выполнен с возможностью приема данных, используя по меньшей мере один из по меньшей мере одного бортового канала связи, канала проводной связи, канала беспроводной связи и канала связи типа «бизнес-бизнес», на основе по меньшей мере одного сигнала данных из по меньшей мере одного из одного источника данных на борту по меньшей мере одного подвижного объекта, по меньшей мере одного источника данных, удаленного от по меньшей мере одного подвижного объекта, по меньшей мере одной бортовой системы на борту по меньшей мере одного подвижного объекта и по меньшей мере одной бортовой подсистемы на борту по меньшей мере одного подвижного объекта, причем бортовой блок обработки дополнительно выполнен с возможностью декодировать данные в декодированные данные;
кодер данных на борту по меньшей мере одного подвижного объекта, причем кодер данных выполнен с возможностью сжимать по меньшей мере одно из данных и декодированных данных в сжатую структуру данных;
облачный сервер реального времени, удаленный от по меньшей мере одного подвижного объекта, причем облачный сервер реального времени выполнен с возможностью принимать по меньшей мере одно из данных, декодированных данных и сжатой структуры данных от бортового блока обработки с использованием канала беспроводной связи;
по меньшей мере одно из бортового дисплея оператора на борту подвижного объекта и человеко-машинного интерфейса на борту по меньшей мере одного подвижного объекта, причем бортовой дисплей оператора и человеко-машинный интерфейс выполнены с возможностью отображать по меньшей мере одно из данных и декодированных данных; и
по меньшей мере одну удаленную платформу, удаленную от по меньшей мере одного подвижного объекта на связи с веб-средством просмотра, причем веб-средство просмотра выполнено с возможностью отображать по меньшей мере одно из данных, декодированных данных и сжатой структуры данных, принимаемых из облачного сервера реального времени.
18. Система по п. 17, дополнительно содержащая:
средство записи данных на борту по меньшей мере одного подвижного объекта, содержащее по меньшей мере один локальный запоминающий компонент, кодер данных, бортовой диспетчер данных и репозиторий с постановкой в очередь, причем средство записи данных выполнено с возможностью принимать данные на основе по меньшей мере одного сигнала данных от по меньшей мере одного из по меньшей мере одного источника данных на борту по меньшей мере одного подвижного объекта, по меньшей мере одного источника данных, удаленного от по меньшей мере одного подвижного объекта, по меньшей мере одной бортовой системы и по меньшей мере одной бортовой подсистемы и отправлять данные в бортовой блок обработки;
кодер данных, выполненный с возможностью кодировать предварительно определенный объем данных в кодированные данные; и
бортовой диспетчер данных, выполненный с возможностью:
- дополнять кодированные данные в сжатую структуру данных и
- сохранять по меньшей мере одно из данных, кодированных данных и сжатой структуры данных с конфигурируемой первой предварительно определенной частотой в по меньшей мере одном из по меньшей мере одного локального запоминающего компонента и репозитория с постановкой в очередь.
19. Система по п. 17, дополнительно содержащая декодер данных, удаленный от по меньшей мере одного подвижного объекта, причем декодер данных выполнен с возможностью по меньшей мере одного из декодирования данных в декодированные данные и распаковки сжатой структуры данных в распакованные данные.
20. Система по п. 18, в которой по меньшей мере один локальный запоминающий компонент содержит по меньшей мере одно из автономного аварийно-ударозащищенного запоминающего модуля, интегрированного аварийно-ударозащищенного запоминающего модуля, неаварийно-ударозащищенного устройства хранения данных, съемного устройства хранения данных и локального устройства хранения данных.
21. Система по п. 19, в которой локальное устройство хранения данных представляет собой локальный кэш на борту по меньшей мере одного подвижного объекта.
22. Система по п. 17, при этом данные содержат по меньшей мере одни из данных в реальном времени, хронологических данных и сторонних данных.
23. Система по п. 17, в которой бортовой блок обработки дополнительно выполнен с возможностью идентифицировать предварительно заданное событие на основе данных при условии, что возникает предварительно заданное событие, затрагивающее по меньшей мере один подвижный объект.
24. Система по п. 22, в которой сторонние данные принимаются через по меньшей мере одного из канала проводной связи, канала беспроводной связи и канала связи типа "бизнес-бизнес".
25. Система по п. 17, в которой бортовой блок обработки дополнительно выполнен с возможностью по меньшей мере одного из следующего:
принимать, с использованием по меньшей мере одного из по меньшей мере одного бортового канала связи, канала проводной связи и канала беспроводной связи, данные из по меньшей мере одного из средства записи данных на борту по меньшей мере одного подвижного объекта, по меньшей мере одной бортовой системы на борту по меньшей мере одного подвижного объекта, по меньшей мере одной бортовой подсистемы на борту по меньшей мере одного подвижного объекта, по меньшей мере одного источника данных на борту по меньшей мере одного подвижного объекта и по меньшей мере одного источника данных, удаленного от по меньшей мере одного подвижного объекта;
принимать, используя по меньшей мере одно из канала проводной связи, канала беспроводной связи и канала связи типа «бизнес-бизнес», данные от стороннего источника; и
отправлять, используя канал беспроводной связи, данные на по меньшей мере одну удаленную платформу.
26. Система по п. 17, в которой по меньшей мере одно из бортового дисплея оператора и человеко-машинного интерфейса содержит по меньшей мере одно из съемного бортового дисплея, предусмотренного в упомянутой системе, бортового дисплея оператора, обеспеченного третьей стороной и бортового дисплея оператора, предварительно установленного на по меньшей мере одном подвижном объекте.
27. Система по п. 17, при этом облачный сервер реального времени дополнительно выполнен с возможностью хранения по меньшей мере одного из данных, декодированных данных и сжатой структуры данных в удаленном устройстве хранения данных, удаленном от по меньшей мере одного подвижного объекта.
28. Система по п. 19, при этом облачный сервер реального времени дополнительно выполнен с возможностью отправки по меньшей мере одного из декодированных данных и сжатой структуры данных на по меньшей мере одну удаленную платформу.
29. Система по п. 17, в которой бортовой канал связи содержит по меньшей мере одно из стандартного Ethernet, проприетарного Ethernet, контроллерной сети, локальной рабочей сети, последовательных соединений и многофункциональной шины транспортного средства.
30. Система по п. 17, в которой бортовой блок обработки дополнительно выполнен с возможностью мгновенно транслировать диагностические журналы на облачный сервер реального времени, используя канал беспроводной связи.
31. Система по п. 17, в которой канал беспроводной связи содержит по меньшей мере одно из Wi-Fi, беспроводной локальной вычислительной сети, беспроводной общегородской вычислительной сети, беспроводной глобальной вычислительной сети, частной беспроводной системы, сети спутниковой связи, сотовой телефонной сети.
32. Система по п. 17, при этом облачный сервер реального времени дополнительно выполнен с возможностью принимать по меньшей мере один запрос от по меньшей мере одного удаленно расположенного авторизованного пользователя, причем запрос содержит по меньшей мере одно из удаленного обновления программного приложения и запрошенного пользователем действия.
33. Система по п. 32, в которой по меньшей мере одно из бортового блока обработки, по меньшей мере одной бортовой системы и по меньшей мере одной бортовой подсистемы дополнительно выполнено с возможностью выполнять по меньшей мере одно из удаленного обновления программного обеспечения и запрошенного пользователем действия.
34. Система по п. 17, в которой веб-средство просмотра дополнительно выполнено с возможностью отображать такой же контент, что отображается на по меньшей мере одном из бортового дисплея оператора и человеко-машинного интерфейса.
35. Система по п. 17, в которой веб-средство просмотра дополнительно выполнено с возможностью позволять удаленно расположенному пользователю просматривать контент, отличный от контента, показываемого на по меньшей мере одном из бортового дисплея оператора и человеко-машинного интерфейса.
| Станок для придания концам круглых радиаторных трубок шестигранного сечения | 1924 |
|
SU2019A1 |
| Станок для придания концам круглых радиаторных трубок шестигранного сечения | 1924 |
|
SU2019A1 |
| Автомобиль-сани, движущиеся на полозьях посредством устанавливающихся по высоте колес с шинами | 1924 |
|
SU2017A1 |
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |
| СИСТЕМА СВЯЗИ ДЛЯ ИСПОЛЬЗОВАНИЯ В ЖЕЛЕЗНОДОРОЖНОМ ПОДВИЖНОМ СОСТАВЕ | 2015 |
|
RU2680206C2 |

