ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Варианты реализации настоящего изобретения относятся к определению скорости многомерного перемещения объекта в глобальной системе координат, а еще конкретнее к определению скорости многомерного перемещения удара, например, во время боксерского матча.
УРОВЕНЬ ТЕХНИКИ
[0002] В некоторых событиях, таких как спортивные события, подобные боксерским матчам, необходимо, например, обеспечить зрителю улучшенное восприятие этого события с использованием информации, которую он в состоянии понять и сравнить. В контексте боксерских поединков известны понятия, которые должны предоставлять информацию о скорости боксерских ударов. Такая информация впоследствии может быть использована для усовершенствования информационного (телевизионного) освещения боксерских матчей.
[0003] Например, в US 6139432 A или US 6183965 B описано измерение данных о скорости с использованием захвата видеоданных. При таком подходе кулак боксера или боксерская перчатка должны быть непрерывно видны на видеоизображении. Кроме того, перемещения в перспективном изображении искажают правильную оценку скорости. Кроме того, изображение кулака или боксерской перчатки предпочтительно должно иметь хорошее разрешение, что приводит к необходимости использования сложной видеокамеры и сложным способам компенсации перемещения. Следовательно, такие видеосистемы, по всей вероятности, не слишком хорошо подходят для оценки скорости спортивных событий (в прямой трансляции), в частности боксерских событий.
[0004] В US 2010144414 A описан реализованный с использованием компьютера способ анализа активности спортсмена, например боксера, для обеспечения возможности качественного исследования этой активности посредством процессора. Способ включает прием связанных с активностью данных, относящихся к событию в виде удара, от датчиков, расположенных на спортсмене. Датчики могут быть акселерометром с тремя осями и гироскопом, прикрепленными к спортсмену. Относящиеся к активности данные сохраняются в базе данных. Процессор сравнивает принятые относящиеся к активности данные с набором предварительно идентифицированных дискретных результатов, таких как заданные профили перемещения. Процессор может идентифицировать один из предварительно идентифицированных результатов как результат, соответствующий принятым относящимся к активности данным, на основании результата сравнения этих принятых относящихся к активности данных с набором предварительно идентифицированных результатов. То есть правила перемещения могут быть сравнены с данными о событии в виде удара для определения того, какой удар имел место. Наконец, идентифицированный предварительно идентифицированный результат может быть отображен. Однако гироскопы очень чувствительны к ударной нагрузке, что может вызвать практические проблемы при использовании концепции US 2010144414 A.
[0005] В US 4763284 A описана система для отображения величины силы, выработанной участником спортивного состязания во время спортивного события, такого как боксирование, боевые искусства, соревнования в беге, соревнования пловцов и т.п. Система содержит первый переносной блок для размещения на конечности, такой как рука или нога участника, или на снаряжении участника, таком как плечевые накладки у игрока в футбол. Указанный переносной блок ориентирован в непосредственной близости к концу конечности таким образом, что он находится рядом с источником силы, выработанной этой конечностью. В корпусе размещен датчик для определения величины и относительного времени действия каждой силы, выработанной конечностью. Датчик жестко ориентирован на конечности в непосредственной близости к внутренней структуре кости для максимизации определения силы. Выходом датчика является сигнал, пропорциональный величине выработанной силы.
[0006] В US 5723786 A описана боксерская перчатка, содержащая тело боксерской перчатки, и внутри тела боксерской перчатки расположен акселерометр, который непрерывно измеряет мгновенное ускорение боксерской перчатки. Боксерская перчатка дополнительно может содержать радиочастотный передатчик, расположенный в теле перчатки и связанный с акселерометром, для передачи кодированных считанных акселерометром данных отображающему устройству. Кроме того, акселерометр может содержать три взаимно ортогональных акселерометра.
[0007] Дополнительная возможность для отслеживания перемещения спортсмена, такого как боксер, могла бы состоять в использовании системы позиционирования в режиме реального времени (RTLS). Такие системы RTLS обеспечивают беспроводной способ отслеживания, согласно которому положения людей и объектов могут быть определены в режиме реального времени и с высокой точностью. По сравнению с основанными на видеосъемке подходами, этот основанный на радиопередаче способ обеспечивает некоторые преимущества. В данном случае способность отслеживания не уменьшается препятствиями, которые в случае видеосъемки загораживают обзор. Отслеживающая система в режиме реального времени является более чувствительной, точной и гибкой, чем любая сопоставимая технология. Следовательно, перчатка боксера может быть оборудована передатчиками или транспондерами. В данном случае могут быть оценены задержки распространения сигнала, разности задержек распространения сигнала, углы падения и т.п., данные, относящиеся к скорости и/или ускорения события удара.
[0008] Таким образом, на основании описанного уровня техники следует признать, что имеется необходимость в создании или усовершенствовании и/или упрощении способов определения или оценки скорости многомерного объекта или перемещения спортсмена.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
[0009] Одно открытие настоящего изобретения состоит в использовании измерения данных об ускорении в качестве средства для измерения скорости. Данные об ускорении могут быть использованы для вычисления скорости путем интегрирования. Данные о скорости, а также данные об ускорении могут быть определены как векторы направлений, имеющие х-, у- и z-компоненты. Таким образом, х-, у- и z-выборки ускорения могут быть приняты от многомерного акселерометра, размещенного в выполненном с возможностью поступательного и/или поворотного перемещения (поворота) объекте, таком как, например, рука спортсмена или кулак боксера. Таким образом, подвижный объект задает локальную выполненную с возможностью поворота или поворотную систему координат в пределах фиксированной глобальной системы координат, в которой должна быть определена или оценена скорость.
[0010] Согласно первому аспекту настоящего изобретения, предложен способ определения скорости многомерного перемещения спортсмена в глобальной системе координат на основании многомерных данных об ускорении от многомерного акселерометра, размещенного в обладающей способностью поступательного и/или поворотного перемещения конечности спортсмена, которая определяет локальную систему координат. Способ включает определение на основании многомерных данных об ускорении по меньшей мере одного корректирующего значения, учитывающего поворот локальной системы координат относительно глобальной системы координат во время многомерного перемещения объекта. Кроме того, способ включает определение скорости многомерного перемещения объекта на основании интегрирования многомерных данных об ускорении с учетом по меньшей мере одного корректирующего значения.
[0011] Согласно другому аспекту, варианты реализации настоящего изобретения обеспечивают устройство для определения скорости многомерного перемещения объекта в глобальной системе координат на основании многомерных данных об ускорении от многомерного акселерометра, размещенного в выполненном с возможностью поступательного и/или поворотного перемещения объекте, который определяет локальную систему координат. Устройство содержит процессор, выполненный с возможностью определения на основании многомерных данных об ускорении по меньшей мере одного корректирующего значения, учитывающего поворот локальной системы координат объекта относительно глобальной системы координат во время многомерного перемещения объекта, и процессор, выполненный с возможностью определения скорости многомерного перемещения объекта на основании интегрирования многомерных данных об ускорении с учетом по меньшей мере одного корректирующего значения.
[0012] Варианты реализации содержат определение по меньшей мере одного корректирующего значения и/или скорости центрально или локально в подвижном объекте. Согласно первому варианту реализации (в случае централизованной обработки данных) процессор, выполненный с возможностью определения по меньшей мере одного корректирующего значения, и/или процессор, выполненный с возможностью определения скорости, может быть центральным или дистанционным объектом, принимающим многомерные данные об ускорении от подвижного объекта посредством проводной или беспроводной связи, например посредством радиосигналов. Согласно второму варианту реализации (в случае локальной обработки данных), процессор, выполненный с возможностью определения по меньшей мере одного корректирующего значения, и/или процессор, выполненный с возможностью определения скорости, может быть расположен непосредственно на подвижном объекте или в нем. Затем определенные данные скорости могут быть дополнительно переданы проводным или беспроводным способом.
[0013] Согласно некоторым вариантам реализации, выполненный с возможностью поступательного и/или поворотного перемещения (или поворота) объект может быть конечностью спортсмена. В частности, выполненный с возможностью поступательного и/или поворотного перемещения объект может быть кулаком или боксерской перчаткой, охватывающей кулака боксера. То есть объект может быть боксером, носящим по меньшей мере одну боксерскую перчатку, причем многомерным перемещением объекта является многомерный удар боксера, а многомерный акселерометр, такой как акселерометр с тремя осями, может быть размещен по меньшей мере в одной боксерской перчатке.
[0014] Некоторые варианты реализации содержат цифровую схему управления, установленную в устройстве для реализации способа. Такая цифровая схема управления, например процессор цифровых сигналов (DSP), прикладная специализированная интегральная схема (ASIC) или компьютер общего назначения, должна быть запрограммирована соответствующим образом. Следовательно, согласно другим вариантам реализации, также предложена компьютерная программа, содержащая программный код для осуществления вариантов реализации способа, когда эта компьютерная программа исполняется компьютером или цифровым процессором.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0015] Ниже описаны некоторые варианты реализации устройств и/или способов в качестве только примеров и со ссылкой на сопроводительные чертежи, на которых:
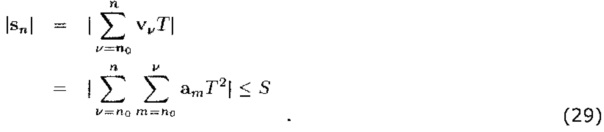
[0016] На фиг. 1 показаны векторы общего ускорения и гравитационного ускорения,
[0017] На фиг. 2 показан тот же самый вектор глобального ускорения в различных локальных системах координат,
[0018] На фиг. 3а схематично показана блок-схема способа согласно одному варианту реализации,
[0019] На фиг. 3b схематично показана обучающая стадия способа согласно одному варианту реализации,
[0020] На фиг. 4 показана двумерная конфигурация датчиков ускорения для определения углов поворота,
[0021] На фиг. 5 показаны ориентационные углы в соответствии с концепцией Тэйта и Брайена,
[0022] На фиг. 6 схематично показана возможная конфигурация датчиков ускорения,
[0023] На фиг. 7 показана возможная конфигурация датчиков ускорения,
[0024] На фиг. 8 схематично показан боксерский ринг с искусственно генерируемым магнитным полем,
[0025] На фиг. 9 показан пример долговременного интегрирования значений ускорения во время боксерского удара,
[0026] На фиг. 10 показан пример образца удара при частоте выборки или измерения 1200 Гц,
[0027] На фиг. 11 схематично показана принципиальная схема устройства согласно одному варианту реализации,
[0028] На фиг. 12а показана боксерская перчатка с локальной системой координат и по меньшей мере одним датчиком ускорения, и
[0029] На фиг. 12b показана принципиальная схема по меньшей мере одного датчика ускорения, связанного с устройством согласно одному варианту реализации, причем и то и другое встроены в боксерскую перчатку.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0030] В следующем описании некоторых подходящих вариантов реализации будет использоваться следующая система математических обозначений: векторы и матрицы представлены строчными и прописными буквами, напечатанными жирным шрифтом. Векторы определены как векторы-столбцы. Е{х} - ожидаемое значение, и  является дисперсией х. I обозначает единичную матрицу.
является дисперсией х. I обозначает единичную матрицу.
[0031] Задача определения скорости выполненного с возможностью поступательного и/или поворотного перемещения объекта, например, в форме ударяющего кулака, может быть описана полностью только в трехмерном пространстве. С этой целью может быть определена соответствующая система координат с направлениями х, у и z, и, таким образом, в этом случае скорость и ускорение должны быть обработаны векторным способом, т.е. способом разделения на соответствующие компоненты именно в этих направлениях v(t)=(vx(t), vy(t), vz(t))T (скорость) и a(t)=(ax(t), ay(t), az(t))T (ускорение) (ХТ и хТ являются транспонированиями матрицы X и вектора х соответственно). Эта система координат может быть локальной, т.е. для кулака или для бойца в определенной начальной ориентации и местоположении, или, иначе, глобальной (в смысле этой формулировки задачи) в неподвижной системе координат на ринге, в боксерском зале и т.п.
[0032] В любой момент векторы (независимо, ускорения a(t) или скорости v(t)) в этих системах координат различаются только соответствующим поворотом координат, который задан поддерживающим абсолютное значение преобразованием, которое может быть выражено как умножение на (переменную во времени) матрицу S(t) преобразования. Преобразование переменной во времени (поворотной) локальной системы координат в неподвижную глобальную систему координат может быть выполнено следующим образом, например, для ускорения:

[0033] Решение о выборе системы координат может быть принято прагматически на основе системных предпосылок. В ситуации с многомерными датчиками ускорения, встроенными и прикрепленными в боксерских перчатках, данные измерений могут быть обусловлены локальной системой координат кулака (или боксерской перчатки). Эта система координат непрерывно изменяет свою ориентацию по отношению к глобальной системе координат. Однако одни только изолированные датчики ускорения не могут распознавать соответствующую ориентацию или ее изменение.
[0034] Непрерывный во времени вектор v скорости может быть вычислен математически в момент времени t1 в предположении нулевой скорости (неподвижности) в момент времени t0 из вектора а ускорения на основе:

[0035] Таким образом, индивидуальные компоненты а(t) могут быть включены независимо друг от друга, т.е. на покомпонентной основе для указанного вектора. Нулевое время to может быть использовано для калибровки относительно нулевой скорости v(to)=vo=0, поскольку эта начальная скорость в ином случае включена аддитивно в вышеуказанное вычисление интеграла (формально, именно это постоянное слагаемое отсутствует в уравнении (2)). Однако это уравнение формально справедливо только для глобальной системы координат или для неповоротной локальной системы координат боксерской перчатки.
[0036] На этапе, относящемся к периодическим дискретным измерениям, можно перейти к дискретным временам tn=to+nT для эквидистантного осуществления выборки в диапазоне Т, что означает, что суммирование в результате дает ускорение по дискретному времени.
[0037] Однако измеренные значения  ускорения в дискретный момент n времени отклонения от действительного ускорения по причине переменной во времени шумовой составляющей
ускорения в дискретный момент n времени отклонения от действительного ускорения по причине переменной во времени шумовой составляющей  дополнительная статистическая информация о которой первоначально отсутствует. Таким образом, первоначально следующее предположительно может быть истиной:
дополнительная статистическая информация о которой первоначально отсутствует. Таким образом, первоначально следующее предположительно может быть истиной:

[0038] Таким образом, это также оказывает дополнительное влияние на оценку скорости в интеграле (в сумме) таким же образом, как и любое постоянное отклонение с течением времени (смещение) bo, которое может присутствовать по причине отсутствующей или запоздалой ошибочной калибровки:

[0039] Формально смещение bo также может быть включено в суммированную шумовую составляющую  например, как среднее значение, но последнее предполагает, что
например, как среднее значение, но последнее предполагает, что  а также индивидуальные члены
а также индивидуальные члены  заранее свободны от средних значений, и этап для zn может привести к такому среднему значению, которое является переменным во времени. Кроме того, при обработке сигналов часто полагают, что проще по отдельности записывать и обрабатывать составляющую, которая с течением времени является постоянной, чтобы оценить ее в наглядной форме, например, посредством образования среднего значения с его последующей компенсацией.
заранее свободны от средних значений, и этап для zn может привести к такому среднему значению, которое является переменным во времени. Кроме того, при обработке сигналов часто полагают, что проще по отдельности записывать и обрабатывать составляющую, которая с течением времени является постоянной, чтобы оценить ее в наглядной форме, например, посредством образования среднего значения с его последующей компенсацией.
[0040] Как показано на фиг. 1, измеренное ускорение amess в поле тяготения земли состоит из двух частей помимо шума: первого компонента, который фактически происходит из (действительного) ускорения areal,n, и второго компонента, который противодействует ускорению в силу гравитации g. Коэффициент гравитации применяется с исключениями при свободном падения, но также пропорционально при ограниченном падении. Однако эти случаи не применимы в спортивном контексте, например, к боксерам, которые в целом стоят на земле. Таким образом, путем вставления an=arealn=gn получается расширение уравнения (4):

где areal,n описывает действительное ускорение в момент n времени. В рассматриваемой структуре ускорение, вызванное гравитацией gn, имеет постоянное абсолютное значение из-за возможного местоположения датчика на ринге, которое строго ограничено в отношении пространства.

[0041] Однако это не может быть применено к указанному вектору из-за изменяющейся ориентации кулака или датчика относительно поля тяготения, что означает, что в данном случае в целом справедливым является следующее:

т.е. сила тяжести распределена по-разному в зависимости от направления компонентов стечением времени.
[0042] Оценка скорости на основании этих фундаментальных факторов путем интегрирования результатов измерения ускорения имеет серьезные препятствия или ограничения оценки скорости, которые описаны ниже, сначала с функциональной точки зрения, и затем с точки зрения временной/технической структуры.
[0043] Требования, обсуждаемые в настоящей заявке, выведены из физического/математического и технического принципа измерения, согласно которому для определения скорости измеряют ускорение.
[0044] Однако поворот многомерных датчиков ускорения (осей датчиков), размещенных, например, в боксерской перчатке, в целом также приводит к ошибкам в случае простого вычисления скорости путем интегрирования по вектору ускорения. Следующий пример приведен для разъяснения этого эффекта: в этом отношении может быть принято унифицированное ускорение (an=а, для n=1, 2, 3, и an=0 для остальных случаев) объекта из состояния покоя в глобальной эталонной системе для следующих трех временных шагов n=1, 2 и 3. Тогда, следующее совершенно определенно можно применить для получения результирующей глобальной скорости:

[0045] Вследствие поворота датчика и, следовательно, локальной системы координат во время ускорения, неравенство:

может быть применено к ускорению в трех временных шагах, которое является постоянным по абсолютному значению и имеет ту же самую глобальную ориентацию, как показано на фиг. 2. Указанное неравенство, в частности, является явным, если (в отличие от показанного на фиг. 2) предполагается в этом примере, что в течение каждого раза ускорение происходит полностью в направлении (различной) локальной оси, например  причем все другие компоненты ускорения в уравнении (10), таким образом, должны быть равны нулю. Для данного примера известна результирующая полная скорость
причем все другие компоненты ускорения в уравнении (10), таким образом, должны быть равны нулю. Для данного примера известна результирующая полная скорость  . Следовательно, также ясно, что скорость, вычисленная таким простым способом в локальной системе координат, является неправильной, поскольку преобразование для перехода к поворотной системе координат представляет собой преобразование, которое поддерживает абсолютные значения, т.е. оно только по-другому перераспределяет по компонентам абсолютное значение вектора. Неравенство (10) является только конкретизацией аксиомы треугольника или неравенства Коши-Буняковского. Также по этой причине ясно, что вышеуказанное неравенство также должно быть применимо к общему случаю с более продолжительными интервалами наблюдения.
. Следовательно, также ясно, что скорость, вычисленная таким простым способом в локальной системе координат, является неправильной, поскольку преобразование для перехода к поворотной системе координат представляет собой преобразование, которое поддерживает абсолютные значения, т.е. оно только по-другому перераспределяет по компонентам абсолютное значение вектора. Неравенство (10) является только конкретизацией аксиомы треугольника или неравенства Коши-Буняковского. Также по этой причине ясно, что вышеуказанное неравенство также должно быть применимо к общему случаю с более продолжительными интервалами наблюдения.
[0046] Указанное неравенство суммирования также может быть показано подобным способом для глобально изменяемого ускорения. Этот мысленный эксперимент также может быть развернут одинаково хорошо на 180°, т.е. в том же самом направлении ускорения в поворотной локальной системе и, следовательно, в различных направлениях в глобальной системе, и, следовательно,  Таким образом, из этого следует, что скорость, локально оцененная таким образом, также может быть больше, чем действительная или глобальная скорость. Поскольку в данном случае шумы измерения не учитываются, "шапочка" над символом vglobal может быть опущена. Это выражение символизирует оценку с действительной скоростью и скоростью, оцененной в глобальной системе, в этом случае без согласования по минимуму шумов. Для вариантов реализации, которые охватывают интегрирование по ускорению, его значение является двойным:
Таким образом, из этого следует, что скорость, локально оцененная таким образом, также может быть больше, чем действительная или глобальная скорость. Поскольку в данном случае шумы измерения не учитываются, "шапочка" над символом vglobal может быть опущена. Это выражение символизирует оценку с действительной скоростью и скоростью, оцененной в глобальной системе, в этом случае без согласования по минимуму шумов. Для вариантов реализации, которые охватывают интегрирование по ускорению, его значение является двойным:
- суммирование в локальной координатной или эталонной системе является формально неправильным в общем случае возможного поворота (локальных) осей датчика в глобальной системе координат,
- ориентация локальной системы координат может быть определена в каждом случае для правильного вычисления ускорения. Однако преобразование в глобальную систему координат не является необходимым для этого, оно является достаточным для определения и исправления относительного поворота в отношении к исходной ориентации или любой другой во время интегрирования,
- компенсация на основании типа удара также может способствовать улучшению результата.
[0047] Ниже кратко описаны некоторые конкретные варианты реализации настоящего изобретения. Специалистам понятно, что принципы настоящего изобретения не ограничиваются описанными конкретными вариантами реализации. Вместо этого могут быть использованы конструктивные изменения, также решающие технические задачи, лежащие в основе вариантов реализации настоящего изобретения. Например, несмотря на то, что ниже описаны различные варианты реализации некоторых способов и их этапов, следует понимать, что устройства и системы, содержащие функциональные блоки для осуществления указанных способов и их этапов, также включены в варианты реализации настоящего изобретения.
[0048] На фиг. 3а схематично показана блок-схема способа 310 определения скорости многомерного перемещения объекта в глобальной системе 300 координат на основании многомерных данных об ускорении, полученных от многомерного акселерометра 302, размещенного в выполненном с возможностью поступательного и/или поворотного перемещения объекте 304. Подвижный объект 304 определяет локальную систему 306 координат. В конкретном варианте реализации, показанном на фиг. 3, выполненным с возможностью перемещения объектом 304 является боксер или, более конкретно, его кулак, защищенный боксерской перчаткой. Следовательно, многомерное перемещение объекта можно рассматривать как перемещение кулака 304 боксера во время выполнения боксерского удара согласно данному варианту реализации. Однако специалисту понятно, что альтернативные варианты реализации для других сценариев и подвижных объектов также могут быть охвачены принципами настоящего изобретения.
[0049] Способ 310 содержит первый этап 312, согласно которому определяют на основании многомерных данных об ускорении, измеренных многомерным акселерометром 302, по меньшей мере одно корректирующее значение 314, учитывающее поворот локальной системы 306 координат объекта относительно глобальной системы 300 координат во время многомерного перемещения объекта. Кроме того, способ 310 включает этап 316, согласно которому определяют скорость 318 многомерного перемещения объекта на основании интегрирования многомерных данных об ускорении и с учетом по меньшей мере одного корректирующего значения 314. Специалисту понятно, что этапы 312 и 316 могут быть реализованы выполненными соответствующим образом процессорами. Следовательно, позиционные номера 312 и 316 также могут относиться к процессору, действующему для определения на основании многомерных данных об ускорении по меньшей мере одного корректирующего значения 314, учитывающего поворот локальной системы 306 координат объекта относительно глобальной системы 300 координат во время многомерного перемещения объекта, и процессору, действующему для определения скорости 318 многомерного перемещения объекта на основании интегрирования многомерных данных об ускорении и с учетом по меньшей мере одного корректирующего значения 314.
[0050] Предпочтительно по меньшей мере одно корректирующее значение 314 не должно быть основано на данных гироскопа согласно вариантам реализации, поскольку гироскопы, как считается, являются очень чувствительными к ударной нагрузке. Однако использование гироскопа не должно быть исключено из вариантов реализации настоящего изобретения.
[0051] В первом варианте реализации результат перемещения например, удар или его скорость могут быть основаны на согласовании траектории перемещения, причем набор заданных траекторий перемещения может быть сохранен, например, в центральной или локальной базе данных. По меньшей мере одно корректирующее значение 314, которое может быть скалярной коррекцией или коэффициентом компенсации согласно данному варианту реализации, является тем меньше, чем больше перемещение удара напоминает круговую траекторию, и тем меньше, чем меньше соответствующий радиус удара. Для таких вариантов реализации, основанных на сопоставлении с образцом, может быть предусмотрена стадия обучения, которая должна быть выполнена индивидуально для каждого атлета и/или типа удара. Во время этой стадии обучения боксер может выполнять конкретный удар в лабораторных условиях. Таким образом, характерное перемещение удара может быть записано параллельно инерциальной навигационной системой (INS) согласно одному варианту реализации и более точной эталонной системой, например, основанной на видеотехнике системой для захвата данных движения, или беспроводной основанной на радиотехнике системе позиционирования в реальном времени (RTLS). Обе системы, т.е. инерциальная навигационная система и эталонная система могут индивидуально определять скорость vINS и vref удара, причем в инерциальной навигационной системе используются многомерные данные об ускорении, полученные от многомерного акселерометра 302 (предпочтительно без какой-либо коррекции), и при этом эталонная система может определять скорость на основании, например, захваченных видео изображений удара. На основании сравнения обеих индивидуально определенных скоростей для некоторого типа удара может быть определено корректирующее значение 314 скорости, например, kcorr=vref/vINS, которое затем может быть использовано во время реального боя или для обучающего сценария для коррекции значений VINS скорости, определенных на основании интегрирования многомерных данных об ускорении, полученных от многомерного акселерометра 302, согласно 
[0052] Т.е. этап 314 определения по меньшей мере одного корректирующего значения 314 может включать сравнение первой скорости заданного перемещения (например, удара), полученной на основании интегрирования многомерных данных об ускорении для заданного перемещения без корректирующего значения, с второй скоростью заданного перемещения, полученной на основании эталонных данных перемещения, обеспечивающих более точные результаты скорости, чем многомерные данные об ускорении, измеренные с использованием многомерного акселерометра 302. Таким образом, согласно некоторым вариантам реализации эталонные данные многомерного перемещения объекта могут быть получены из основанного на видео или RTLS анализа заданного перемещения эталонного объекта или эталонного спортсмена во время стадии 312' начального обучения способа 310, который схематично показан на фиг. 3b.
[0053] Во время этого этапа 312' начального обучения оценка v скорости может быть определена на основании многомерных данных 320 об ускорении, измеренных с использованием многомерного акселерометра 302, прикрепленного к объекту 304 посредством определяющего скорость блока 322, с одной стороны, в то время как эталонное значение vref скорости может быть определено на основании более точных эталонных данных 324 перемещения из перемещения объекта 304 посредством точного эталонного определяющего скорость блока 326, с другой стороны. На основании значений v и vref скорости корректирующее значение 314 скорости для перемещения или удара конкретного типа может быть определено блоком 328, например, путем определения разности.
[0054] В дополнение к данному или согласно другому варианту реализации по меньшей мере одно корректирующее значение 314 скорости также может быть определено на основании анатомических показателей спортсмена (например его размера) таким образом, что могут быть выполнены эталонные измерения у множества эталонных спортсменов с различной анатомией для получения зависимых от анатомии корректирующих значений 314 скорости для перемещений или ударов различных типов. Путем сравнения эталонной анатомии с анатомией спортсмена, в частности, длины руки или длины предплечья и плеча боксера, скорость удара которого должна быть определена согласно различным вариантам реализации настоящего изобретения, корректирующее значение 314 скорости может быть настроено соответствующим образом. Следовательно, этап 312 определения по меньшей мере одного корректирующего значения 314 дополнительно может включать определение масштабирующего коэффициента 330, основанного на отношении фактического анатомического размера объекта к анатомическому размеру эталонного объекта, например эталонного спортсмена. Этот масштабирующий коэффициент 330 дополнительно может быть использован блоком 328 для определения корректирующего значения 314 скорости.
[0055] Согласно другому варианту реализации или в дополнение к данному три физически распределенных трехмерных датчика ускорения могут быть установлены в подвижном объекте 304, например, конечности спортсмена или боксерской перчатке для определения двух степеней свободы поворота (например, азимута и угла возвышения). Т.е. многомерный акселерометр 302, прикрепленный к объекту 304, может содержать три 3-осевых акселерометра, пространственно распределенные по выполненному с возможностью поступательного и/или поворотного перемещения объекту 304. В этом случае, определение по меньшей мере одного корректирующего значения 314 может включать основанное на данных об ускорении трех пространственно распределенных 3-осевых акселерометров определение поворота локальной системы 306 координат объекта 304 относительно глобальной системы 300 координат во время перемещения объекта 304 для вычислительной компенсации поворота соответствующего преобразования координат локальной системы 306 координат.
[0056] В данном случае, согласно одному варианту реализации указанные 3 трехосевые акселерометра могут быть кольцеобразно расположены вокруг запястья боксера или вокруг боксерской перчатки 304. Чем дальше датчики или акселерометры разнесены друг от друга, тем выше результирующая угловая разрешающая способность. Следовательно, согласно одному варианту реализации датчики (акселерометры) могут быть расположены по существу с угловым разнесением 120° друг от друга вокруг подвижного объекта 304 (Для измерений также могут быть использованы другие конфигурации, однако, они могут привести к увеличенному количеству более сложных формул и вычислений). Различные датчики ускорения могут быть соединены проводной или беспроводной связью. Проводная связь, как принято считать, является более прочной и надежной. В частности, в вариантах реализации, которые могут быть использованы для в боксе, потребность в дополнительных беспроводных приемопередатчиках и процессорах упрощает подход. Затем изменения ориентации локальной системы 306 координат и, следовательно, по меньшей мере одно корректирующее значение 314 скорости могут быть получены двукратным интегрированием различия между соответствующими результатами измерений ускорения. Для повышения точности поворот локальной системы координат объекта может быть определен посредством двукратного интегрирования разности между первыми данными об ускорении, полученными от первого акселерометра, и вторыми данными об ускорении, полученными от второго акселерометра, указанных трех трехосевых акселерометров.
[0057] На фиг. 4 показан пример с двумя различными акселерометрами 302-1 и 302-2. Разность Δах для момента n времени этих двух ускорений ax2, ax1 приводит к повороту, поскольку разность или смещение d между датчиками 302-1 и 302-2 должны оставаться постоянными. Двукратное дифференцирование угла поворота по времени может быть аппроксимировано к:

[0058] В отношении перемещения могут быть предусмотрены небольшие временные интервалы, в противном случае при больших ориентационных угловых изменениях могут быть получены существенные ошибочные результаты. Путем численного интегрирования может быть получено указанное изменение угла ориентации (отклонение):

и результирующий ориентационный угол может быть вычислен на основании:

[0059] Следовательно, поворот локальной системы 306 координат объекта может быть определен посредством двукратного интегрирования разности данных об ускорении, соответствующих углу поворота. Схожим образом могут быть определены все три угла поворота (иногда также называемые эйлеровыми углами), которые могут быть использованы для преобразования координат. Второй тип соглашений называют углами Тэйта-Брайена, причем в настоящей заявке указанные три угла обычно называются как "угол курса, угол возвышения и угол крена" или "рысканье, тангаж и крен" (ϕ, θ, ψ, как показано на фиг. 5). На основании данных об ускорении углы могут быть определены с использованием этих условных обозначений поворота. Затем может быть определено значение компенсации, которое будет описано более подробно в связи с конкретной совокупностью датчиков, как показано на фиг. 6.
[0060] На основании кольцевой конфигурации этих трех датчиков 302-1, 302-2, 302-3 относительный угол курса или рыскание может быть получен на основании:

угол возвышения или тангаж могут быть определены на основании:

где выражение  обозначает среднее значение измерений ускорения датчиков 302-1 и 302-2 в направлении х, и выражение
обозначает среднее значение измерений ускорения датчиков 302-1 и 302-2 в направлении х, и выражение  обозначает эффективное расстояние измеренных значений. Угол крена или крен могут быть получены на основании:
обозначает эффективное расстояние измеренных значений. Угол крена или крен могут быть получены на основании:

[0061] В настоящей заявке используются не все значения датчика. В частности, не рассматриваются все значения azk,v. Однако они могут быть использованы для улучшения оценки угла крена/крена.
[0062] Согласно другому варианту реализации, как показано на фиг. 7, значения ay1/2/3,v и az1/2/3,v могут быть использованы для определения тангенциальной составляющей в соответствии с:



с тангенциальными векторами:

 и
и

которые направлены в касательном направлении в математически положительном смысле на окружающем круге. Поворотное ускорение может быть вычислено из среднего значения указанного тангенциального ускорения (причем радиус указанного круга  ):
):

что позволяет вычислить крен путем двукратного интегрирования согласно вышеуказанной систематике. Следует отметить, что равное ускорение для всех трех датчиков приводит к повороту 0°, что может быть видно из вышеуказанных уравнений.
[0063] Датчики 302-1, 302-2 и 302-3 не должны быть расположены равноудалено по кругу. Однако в вышеуказанных уравнениях должна рассматриваться различная конфигурация. То же самое справедливо и для ориентации датчика. Эта ориентация также может быть калибрована посредством гравитации в состоянии покоя или неподвижности системы. Затем оси датчика должны быть преобразованы соответствующим образом, что может быть выполнено в качестве компенсации поворота.
[0064] Минимальное необходимое расстояние между датчиками может быть определено на основании:

где Δares обозначает разрешающую способность датчика ускорения, например, Δares=2⋅10-3 g. Иными словами, если некоторая угловая разрешающая способность является ожидаемой, например, Δϕres=1°≈0/0175, то:

что может быть весьма легко достигнуто. Угловая разрешающая способность 1° или меньше обеспечивает возможность некоторой предпочтительной линеаризации (например, sin х ≈ х ≈ tans х). Как описано ниже, интервалы интегрирования предпочтительно должны быть короткими по причине дрейфа датчика. Вместо непосредственной оценки на основании вышеуказанных формул вычисление также может быть использовано в качестве основы (расширенного) фильтра Кальмана, фильтра частиц или подобных Байесовских фильтров. Углы могут быть применены непосредственно к значениям ускорения, но также и к их накапливанию для снижения вычислительной сложности за счет сниженных точности и степени детализации, если интервал накапливания становится слишком большим. Каждый угол требует собственной матрицы поворота, которые могут быть объединены в общее преобразование:

таким образом, что

[0065] С поворотом (Гивенса) вокруг оси Z:

поворотом вокруг оси Y:

и поворотом вокруг оси X:

[0066] Для обратного поворота знак индивидуальных углов может быть инвертирован, что идентично транспозиции матрицы, т.е. А(ϕ)=А(-ϕ)T и А(ϕ)А(ϕ)T=I. Согласно другому варианту реализации соответствующая общая матрица преобразования может быть инвертирована.
[0067] Другие варианты реализации вычисления могут быть основаны на исходных Эйлеровых углах с использованием поворота вокруг двух из указанных трех осей. Согласно другому варианту реализации могут быть использованы кватернионы, т.е. системы счисления, которые охватывают комплексные числа. Кватернион может быть определен как частное двух направленных линий в трехмерном пространстве или, эквивалентно, как частное двух векторов. Кватернионы также могут быть представлены как сумма скаляра и вектора.
[0068] Вычисления скорости объекта 304 в момент n времени могут быть выполнены на основании выражения:

в котором упрощенную инверсию Rn=R(ϕn, θn, ψn) можно рассматривать как: Rn-1=R(-ϕn, -θn, -ψn).
[0069] Альтернативно или дополнительно, согласно некоторым вариантам реализации для ориентационного измерения могут использоваться датчики магнитного поля, размещенные в объекте 304, которые измеряют локальное статическое естественное или искусственное магнитное поле, в частности, угол наклона и изменения в нем, например, (тонкослойные) датчики GMR (GMR - гигантское магнитосопротивление) или датчики Холла. Однако измеренное локальное магнитное поле может быть искажено влиянием (ферро) магнитных материалов и строительных материалов, а также протекающими электрическими токами, которые могут оказывать большое воздействие, в частности, во внутренних частях. Кроме того, указанные электрические токи часто могут в значительной степени изменяться во времени, и область их воздействия может изменяться в пространстве в значительной степени, в результате чего измерение может быть искажено или даже нарушено до такой степени, при которой, например, не могут быть осуществлены измерения повышенной или пониженной скоростей. Из приведенного выше обсуждения понятно, что тройка датчиков магнитного поля с тремя осями также может быть использована для определения полного ориентационного изменения. Т.е. подвижный объект 304, например боксерская перчатка, может дополнительно содержать по меньшей мере один, в частности, три датчика магнитного поля, так что этап 312 определения по меньшей мере одного корректирующего значения 314 скорости может включать определение пространственной ориентации выполненного с возможностью поступательного и/или поворотного перемещения объекта 304 путем измерения изменения статического магнитного поля, окружающего этот объект 304, посредством датчиков магнитного поля, причем измеренное изменение вызвано многомерным перемещением объекта в статическом магнитном поле. Таким образом статическое магнитное поле может быть искусственно генерироваться гомогенным магнитным полем, как показано на фиг. 8, или естественным магнитным полем Земли.
[0070] На фиг. 8 схематично показан боксерский ринг 800, расположенный в искусственно генерируемом однородном магнитном поле 810. Таким образом, ориентация магнитного поля 810 может быть по существу ортогональной к плоскости, заданной настилом ринга 800.
[0071] Изменяющаяся во времени ориентация датчика или акселерометра также является важным фактором воздействия на притяжение или силу тяжести как часть ускорения (как показано на фиг. 1), направление которой также изменяется с течением времени относительно локальной системы 306 координат. Поскольку ускорение, вызванное гравитационной силой, не является частью действительного ускорения конечности 304, выполняющей удар, последнее, в принципе, может быть вычтено из гравитационного ускорения, что, однако, является трудно осуществимым из-за изменяющегося во времени направления последнего в локальной системе координат. По существу, при условии постоянной ориентации датчика ускорения относительно гравитации можно определить гравитационное ускорение посредством долговременного усреднения, но в действительности это не может быть приемлемым. Если предполагается, что событие удара продолжается приблизительно 1/4 с или, включая выпад и фиксацию, возможно также 1/2 с, в этот период времени только гравитационное ускорение обуславливает предполагаемое изменение скорости, составляющее приблизительно 9,81 м/с2⋅0,25 с ≈ 2,5 м/с ≈ 9 км/ч (18 км/ч за 0,5 с) в направлении от поверхности земли. Такой подход может исказить результат оценки скорости, которая, таким образом, предпочтительно должна быть компенсирована в максимально возможной степени. Однако в этом случае задача не так сильно зависит от гравитации, как ее фактическая оценка.
[0072] Таким образом, гравитация вносит дрейф в скорость, который может быть оценен из уравнения (3) на основании непрерывного интегрирования гравитации, или в случае частичной компенсации ее остатков, как показано на фиг. 9. В этом случае гравитационное ускорение включается в измеренные значения ускорения в качестве смещения (см. уравнение (4)). Однако это смещение не является статическим (постоянным с течением времени), и вместо этого изменяет свою текущую ориентацию с течением времени и, следовательно, свое разделенное на компоненты направление в результате поворота датчиков вместе с кулаком 304. Таким образом, гравитация также не может быть определена исключительно как среднее значение для оцененных скоростей при их разделении, что означает, что эффект ускорения кулака и гравитационного ускорения вряд ли могут быть разделены не только в глобальной эталонной системе 300, но также и в локальной эталонной системе 306. В этом случае, это можно сделать только приблизительно.
[0073] На первой, верхней диаграмме на фиг. 9 отчетливо показан дрейф из-за того, что все компоненты ах, ау, и az ускорения фактически являются постоянно отрицательными в состоянии относительного покоя или вялого перемещения, на второй, нижней диаграмме показан дрейф из-за непрерывно увеличивающейся скорости. Абсолютное значение дрейфа также имеет почти линейный эффект, но при рассмотрении компонентов можно видеть, что в начале фактически постоянный компонент имеет увеличенное абсолютное значение в направлении Y, но затем отдаляется от компонента z. Это указывает на изменение местоположения или поворот руки, применяющей удар, в состоянии покоя между ударами или, возможно, на то, что датчик соскользнул, или также, возможно, только на наложенный процесс случайного блуждания, вызванный шумом (см. страницу 24).
[0074] Рассмотрение указанных чертежей наталкивает на мысль о противодействии дрейфу, вызванному гравитацией, для определения реальных скоростей.
- Можно определить долговременный градиент (или наклон) кривых скорости, полученных интегрированием. Затем после этого можно использовать данные измерений из предшествующей секции для вычисления гравитации на посекционной основе в линейно (или иначе) интерполированный форме, т.е. вычесть их из определенной скорости. Однако для этого фактически должны быть использованы только данные датчиков, поскольку в противном случае это приводит к смещению в направлении удара. Для этого снова необходимо определение в состоянии покоя или отсутствия перемещения.
- Другой вариант может быть обычной калибровкой с использованием вектора гравитации в качестве краткосрочного среднего значения, полученного из последней стадии фиксации и определенной стадии покоя. Эта стадия покоя с краткосрочным средним значением может быть определена из минимизированного краткосрочного среднего значения ускорения или из краткосрочного среднего значения, близкого к 1 g, что является эквивалентным.
[] В основном, второй вариант совершенно подобен первому, с теми различиями, что во втором случае ускорения уже действует (фактически, он все еще остается эквивалентным) и может быть предсказан вектор, относящийся к гравитационному ускорению, в то время как в первом случае может быть интерполирован профиль скорости. Однако оба подхода страдают неопределенностью относительно того, каким образом кулак с датчиком совершает поворот во время удара. Когда этот поворот оценен, вектор компенсации гравитации также можно повернуть соответствующим образом для улучшения результата компенсации. Согласно  для х>>у, влияние гравитации является самым большим, если она направлена вдоль основной оси ускорения, в противном случае, если совокупность датчиков может использовать это свойство, вектором гравитации также можно пренебречь без особенного ущерба.
для х>>у, влияние гравитации является самым большим, если она направлена вдоль основной оси ускорения, в противном случае, если совокупность датчиков может использовать это свойство, вектором гравитации также можно пренебречь без особенного ущерба.
[0076] Если при оценке скорости используют измеренные значения помехонасыщенного ускорения, шум в ходе необходимого интегрирования вырабатывает то, что известно как процесс случайного блуждания, следующим образом:

[0077] Таким образом, он является неограниченным в долгосрочной перспективе в отношении амплитуды его сигнала и также в отношении его мощности, мощность процесса увеличивается линейно с временем его действия, т.е. с периодом интегрирования (n-n0)Т. Таким образом, можно ожидать, что по ходу вычисления скорости оценка скорости будет быстро "убегать" или далеко смещаться по сравнению с оценкой расстояния, причем этот эффект существенно усилен двойным интегрированием или суммированием, в результате чего последние фактически никогда не используют в чистом виде. Однако такой подход фактически не включает дрейф как таковой в датчик ускорения, поскольку данные об ускорении не изменяются непрерывно в одном направлении, а скорее включают случайный дрейф по причине помехонасыщенной оценки. Интегрирование, естественно, также можно рассматривать как внутреннюю функцию датчика скорости в целом.
[0078] При оценке скорости происходящий дрейф означает, что в этом случае обычная калибровка может быть существенной и может быть осуществлена путем сброса скорости во время относительно неподвижного состояния (v≈0) или путем фиксации при другой известной скорости. Однако, в свою очередь, эта другая скорость должна быть определена, что, в свою очередь, с трудом выполняется путем дрейфа в течение указанного процесса. Однако во время боя не ожидаются долгосрочные скорости унифицированного направления, т.е. абсолютное значение среднего вектора скорости ограничено, что немедленно и справедливо вытекает из следующего рассуждения:
[0079] Средняя скорость или конечная скорость между ударами по меньшей мере близка к нулю. Естественно, охваченные суммированные векторы расстояния, которые в этом случае являются интервалами между начальными и конечными точками, также ограничены максимальным расстоянием  внутри квадратного боксерского ринга с длиной d сторон:
внутри квадратного боксерского ринга с длиной d сторон:
[0080] В качестве прямого умозаключения из этого следует, что для n>n0 и длительного временного периода интегрирования абсолютное значение средних скоростей (n-n0→∞)

стремится к нулю. В качестве прямого следствия,
 в данном случае означает, что это непосредственно также применяется ко всем компонентам средней скорости:
в данном случае означает, что это непосредственно также применяется ко всем компонентам средней скорости:

[0081] Однако на фиг. 10 ясно показано, что случайный дрейф процесса случайного блуждания значительно отступает от него в результате гравитации, поскольку шумовой процесс имеет стандартное отклонение, которое значительно ниже 1 g. Однако это не означает, что эта задача была бы несущественной в случае долгосрочного рассматривания, например, в течение одного боксерского раунда или даже всего боя. Однако это может быть достигнуто в этом случае вместе с дрейфом в результате гравитации путем калибрования или обнуления скорости и одновременного сброса нижнего порога интегрирования.
[0082] Согласно одному варианту реализации, как указано выше, дрейф по причине гравитации можно компенсировать калиброванием многомерных данных об ускорении, например на регулярной основе. Т.е. способ 310 может включать калибрование многомерных данных об ускорении, полученных от многомерного акселерометра 302, путем учета гравитационного ускорения. Таким образом, для калибрования последнего может быть использован вектор ускорения, который может быть записан во время последней относительной стадии восстановления спортсмена перед определенным событием удара. Указанный вектор ускорения последней стадии восстановления может определен:
- на основании минимизации абсолютного значения краткосрочного среднего значения измеренных выборок ускорения или
- на основании минимизации расстояния между 1 g и абсолютным значением краткосрочного среднего значения измеренных выборок ускорения.
[0083] Короткий срок в настоящей заявке означает типичный интервал относительного статического поведения датчика порядка десятков миллисекунд.
[0084] Если невозможно найти минимум абсолютного значения ниже заданного порога, может быть использован последний правомерно определенный минимум ниже указанного порога, соответствующий предыдущему удару. Таким образом, соответствующее краткосрочное среднее значение данных об ускорении может считаться постоянным и
- может быть индивидуально вычтено из значений ускорения, соответствующих определенному удару, для получения компенсированного значения скорости или курса (его абсолютного значения или распределенного по компонентам направлений) после частичного интегрирования с момента определенного начала удара до соответствующего момента времени или
- может быть умножено на общую длительность определенного удара и вычтено из максимальной скорости, определенной посредством интегрирование, включая гравитацию. После определения указанного абсолютного значения может быть получена максимальная скорость без влияния гравитации.
[0085] Следовательно, калибрование многомерных данных об ускорении может включать выбор по меньшей мере одного вектора многомерных данных об ускорении за период стадии бездействия или стадии восстановления перед определенным перемещением/ударом. Затем скорость многомерного перемещения объекта может быть определена на основании интегрирования многомерных данных об ускорении, учитывающих указанный по меньшей мере один вектор многомерных данных об ускорении или его среднее значение.
[0086] Однако эти процедуры могут быть только приближениями, поскольку рука 304 спортсмена и, следовательно, направление вектора гравитации автоматически поворачиваются/изменяются во время удара, что приводит к изменению распределения гравитации по осям х, у и z локальной системы 306 координат.
[0087] Затем оцененная гравитация или среднее значение оцененного вектора гравитации могут быть заново распределены по осям х, у и z локальной системы 306 координат путем преобразования координат. Затем это преобразованное среднее значение может быть индивидуально вычтено из значений ускорения, соответствующих событию удара, для получения характеристики скорости путем частичного интегрирования от момента определенного начала удара до соответствующего момента времени. Значение скорости в конце удара или незадолго перед ним приводит к значению максимальной скорости после определения абсолютного значения.
[0088] Согласно различным вариантам реализации конкретный профиль удара может быть получен в итоге следующим образом:
- Замах - первая стадия (до 0,2 с), во время которой первоначально ускорение направлено от противника (в некоторых вариантах удара это движение может быть фактически опущено, например, для джеба, в то время как в других типах ударов этот период может быть более продолжительным),
- Бросок - самая длинная стадия (до 0,3 с), во время которой возникает существенное ускорение в направлении к противнику. Однако в этом случае перемещение не является простым линейным перемещением. Локальная система 306 совершает поворот относительно начальной ориентации. Ускорение необязательно продолжается до воздействия, а скорее фактически непосредственно перед воздействием может принять нулевое или даже небольшое отрицательное значение,
- Воздействие - короткая стадия, во время которой первоначально некоторые из датчиков ускорения могут войти в насыщение или по меньшей мере показать высокие пиковые уровни. Это необязательно применимо ко всем направлениям измерения (х, у и z), однако, также необязательно применимо к ним полностью одновременно. Некоторые направления ускорения инвертируются несколько раз во время их реакции после воздействия, что указывает на колебания, вызванные воздействием. В данном случае трудно определить, что именно осциллирует: части датчика, его крепление или другие части измерительного прибора, впрочем, это не важно для вычисления, поскольку указанное колебание быстро затухает,
- Стабилизация и отклонение назад - это движение охватывает руку, которую боксер отводит назад, любые колебания в стабилизирующемся датчике и кулаки (обычно), вновь возвращающиеся в исходное положение (защитное положение).
[0089] Также могут быть проанализированы данные датчиков в других ситуациях боя, таких как уклоны и нырки, уходящие перемещения, ложные удары, промахи, комбинации ударов и блокирование ударов противника. Также может представлять интерес получение дополнительной информацию из указанных ситуаций, такой как, например, счетчик шагов.
[0090] Таким образом, калибровка скорости может выполняться в регулярные интервалы по трем причинам:
- из-за включенного измерительного шума (случайного блуждания),
- из-за гравитации (гравитационного ускорения) и
- из-за насыщенного сигнала на выходе датчика после удара кулаком.
[0091] В этом случае скорость повторения может быть значительно выше, чем после трехминутного раунда, т.е. она может быть недостаточной для калибровки нулевой скорости между раундами пока боксер сидит относительно спокойно в углу в течение двух минут. Фактически, перекалибровка может иметь место после каждого удара или после каждого серьезного сотрясения. Вычисление может иметь место перед воздействием удара во время определенного приблизительного бездействия. Точная длительность удара или момента, в которой кулак относительно неподвижен, естественно, может зависеть от нескольких факторов, которые могут быть учтены для оптимальной калибровки, например, таких как:
- боец или весовая категория: в легких категориях должны ожидаться более высокие ускорения или скорости чем в тяжелой категории, даже если в последнем случае удары, как ожидается, имеют по существу увеличенную массу и, следовательно, силу (импульс удара) чем в легких категориях,
- тип удара: например, крюк или удар прямой удар имеют различные траектории,
- руки (для ударов правой или левой рукой): длинный путь, когда используют руку, совершающую тяжелый удар, по сравнению с более короткой длительностью удара, такого как джеб,
- тактика боя: в зависимости от клинча или длины рук,
- усталость бойцов: в конце обычного матча длительностью до двенадцати раундов могут ожидаться намного более медленные перемещения чем в начале.
[0092] Такое большое количество факторов, влияющих на длительность удара, вероятно, упрощают нахождение такого времени непосредственно из данных датчиков, для которых вариант реализации уже описан выше, например, абсолютное значение измеренного ускорения близко к гравитационному ускорению 
[0093] С точки зрения записанных измерительных кривых определение удара может быть осуществлено различными способами, например, на уровне измеренного полного ускорения или с использованием возникающего насыщения и стабилизации измеренных значений после воздействия, если полный диапазон датчика является недостаточным: диапазон обычных встроенных коммерческих датчиков ускорения составляет до 16 или 24 g. Насыщение, используемое для определения, в целом должно происходить в режиме реального времени для множества осей датчика и иметь некоторую длительность для поглощения других пиков ускорения, например, во время ускорения. Кроме того, стабилизированное поведение значений датчика означает, что датчик не должен иметь введенного насыщения некоторое время накануне. Этот период времени должен быть зафиксирован, соответственно, показательным способом на основе эмпирических значений.
[0094] Если удар по всей вероятности придется определять с использованием процесса стабилизации, быстрые изменения в направлении ускорения в коротком временном интервале также могут являться дополнительным интересующим показателем. Сильное ускорение происходит не только в основном направлении удара, но также и вдоль других осей.
[0095] Согласно другому варианту реализации удар может быть определен во время стадии ускорения путем проверки превышения одной или большим количеством компонентов ах, ау и az ускорения порога ускорения, например, 12 g для заданного периода времени, например, больше чем 20 мс в качестве временного порогового значения. В этом случае, использование заданной длительности времени исключает краткое ускорение, в то время как порог ускорения позволяет игнорировать относительно медленные перемещения или перемещения с небольшой отдачей. Преимущество этого подхода состоит в том, что также могут быть определены удары, которые проходят мимо противника и защиты противника, даже при том, что пиковое ускорение будет ниже порогового значения.
[0096] Также могут быть рассмотрены комбинации вышеуказанных вариантов реализации для улучшения результата определения, т.е. повышения вероятности определения и минимизации вероятности определения промаха. С этой целью также необходимо проверить, имеет ли место стадия ускорения непосредственно перед воздействием. Иначе, скорее всего будет определен удар противника в свою собственную защиту.
[0097] Определение удара с использованием воздействия при упрощенном подходе можно считать первым этапом способа вычисления скорости для обеспечения возможности калибровки в режиме реального времени для нулевой скорости и также для гравитационного ускорения, причем указанная калибровка происходит в обратном направлении от данного момента времени. С целью различения, в частности, серий ударов, ударов мимо цели или в (собственную) защиту должны быть исследованы активные действия и быстрые перемещения с уклоном. До настоящего времени данные таких измерений, выполненных непосредственно во время боя, отсутствуют.
[0098] В качестве примера ниже представлен предложенный алгоритм. Он, прежде всего, охватывает описание множества возможных вариантов, таких как:
• Определение воздействия:
- сигнал о насыщении датчика или превышении порога датчиком,
- сигнал о насыщении другого датчика или превышении порога другим датчиком, близкий по времени,
- сигнал о ненасыщении L выборок накануне,
• Поиск начала перемещения/удара:
- поиск в обратном направлении до (среднего) абсолютного значения ускорения (по K значениям), близкого к 1 g, и
- минимальное превышенное время удара,
- максимальное не достигнутое время поиска,
- затем проверяют перемещение/удар (относительно длительные по времени, с сильным ускорением),
• Калибровка для нулевой скорости:
- определение вектора для гравитационного ускорения путем усреднения по М значениям,
- выведение вектора, относящегося к гравитационному ускорению, для значений интегрирования или выведение из конечного результата после умножения на длительность удара,
• Вычисление максимальной скорости:
- интегрирование или суммирование (в конечном счете включая оценку и компенсацию направленности),
- поиск в обратном направлении локального максимума (пока текущее значение скорости остается ниже чем предшествующее значение).
[0099] Т.е. способ 310 может включать определение перемещения объекта 304, в частности, удар на основании использования многомерных данных об ускорении, полученных от многомерного акселерометра 302, определение превышения порога ускорения и/или определение насыщения одной или большего количества размерностей многомерных данных об ускорении, и/или определение колебания данных об ускорении. Таким образом, определение многомерного перемещения объекта может быть основано на определении превышения порога ускорения в течение заданного времени, например, 50 мс. Определение многомерного перемещения объекта также может включать определение конца перемещения, например, удара путем определения точки насыщения одной или большего количества размерностей многомерных данных об ускорении при условии, что данные об ускорении являются ненасыщенными или не превышают порог в течение заданного времени перед указанной точкой насыщения. Начало указанного перемещения (например, удара) может быть определено путем выполнения поиска в обратном направлении от точки насыщения до тех пор, пока не будет определено минимальное среднее значение ускорения в многомерных данных об ускорении, принятых от многомерного акселерометра 302.
[00100] На фиг. 11 показан вариант реализации устройства 1100 для определения по меньшей мере скорости многомерного перемещения объекта в глобальной системе координат на основании многомерных данных 1102 ускорения, принятых от многомерного акселерометра, размещенного в выполненном с возможностью поступательного и/или поворотного перемещения объекте, таком как, например, боксерская перчатка. Боксерская перчатка 1200, содержащая многомерный акселерометр 1202 для локальной системы координат боксерской перчатки 1200, схематично показана на фиг. 12а. Акселерометр 1202, как показано на фиг. 12b, может содержать датчик 1204 ускорения, связанный с микроконтроллером 1206, который может реализовать или в котором может быть размещен локальный вариант реализации устройства 1100 согласно некоторым вариантам реализации. Микроконтроллер 1206 может быть связан с входным интерфейсом 1208 радиопередатчика для передачи данных измеренного ускорения и/или скорости посредством антенны 1210 дистанционному блоку, такому как центральный блок, в котором размещен вариант реализации устройства 1100 или, например, отображающего устройства.
[00101] Как показано на фиг. 11, устройство 1100 содержит процессор 1104, который выполнен с возможностью определения на основании многомерных данных 1102 ускорения по меньшей мере одного корректирующего значения, учитывающего поворот локальной системы координат объекта относительно глобальной системы координат во время многомерного перемещения объекта. Кроме того, процессор 1104 или его часть выполнены с возможностью определения скорости 1118 многомерного перемещения объекта на основании интегрирования многомерных данных об ускорении с учетом по меньшей мере одного корректирующего значения. Как описано выше, корректирующее значение может быть масштабирующим коэффициентом и/или может быть основано, например, на разностях соответствующих данных об ускорении.
[00102] Устройство 1110 также может быть выполнено с возможностью определения удара посредством обрабатывающего блока 1106. Таким образом, удар может быть определен путем использования многомерных данных 1102 ускорения, определения превышения порога ускорения, и/или определения насыщения одной или большего количества размерностей многомерных данных об ускорении, и/или определения колебания данных об ускорении. С этой целью синхронизирующие данные, относящиеся к многомерным данным 1102 ускорения, могут быть переданы датчику 1106 удара от синхрогенератора или синхронизирующего средства 1108. Затем результирующее время, соответствующее концу перемещения/удара, может быть использовано для определения начала указанного удара в блоке 1110. Это может быть выполнено путем обратного поиска в буферизованных данных 1112 ускорения, как описано выше. Определенное начальное время 1114 удара, а также буферизованные данные 1112 ускорения могут быть использованы для гравитационной калибровки в блоке 1116 согласно описанным выше принципам. Затем результирующая гравитационная оценка 1120 вместе с буферизованными данными 1112 ускорения также могут быть использованы для правильной оценки скорости посредством процессора 1104. Вычисленная курсовая скорость 1118 определенного удара может быть использована для определения максимальной скорости удара 1124 посредством обрабатывающего блока 1122.
[00103] С использованием устройств и способов, описанных в настоящей заявке, созданных для автоматизированного определения ударов, могут быть сгенерированы типы ударов, перемещений, перемещений с уклоном и т.п., а также статистические данные, относящиеся к спортивному событию или спортсмену, и, таким образом, обеспечивающие возможность сравнения поведения спортсмена в различных спортивных событиях, различного поведения того же самого спортсмена во время спортивного события, поведения различных спортсменов и т.п. С этой целью определенные многомерные данные об ускорении и/или скорость могут быть сохранены в базе данных, и эти сохраненные данные согласно некоторым вариантам реализации впоследствии могут быть обработаны для анализа перемещения. Согласно другим вариантам реализации указанные многомерные данные об ускорении и/или скорости могут быть определены в режиме реального времени. Таким образом, определение в режиме реального времени гарантирует реакции или результаты в пределах жестких временных ограничений. Понятно, что согласно различным вариантам реализации времена реакции в режиме реального времени имеют порядок миллисекунд и иногда микросекунд. В дополнение к данному или согласно другому варианту реализации информация, характеризующая определенные многомерные данные об ускорении и/или скорости, может быть отображена на дистанционном отображающем устройстве и/или локальном отображающем устройстве, расположенном на объекте, например, непосредственно на спортсмене или боксерской перчатке.
[00104] Согласно некоторым вариантам реализации оцененная или определенная скорость может быть указана режиме реального времени соответствующими цветами в спортивном снаряжении спортсмена, например, боксерской перчатке или его шортах. Т.е. первая скорость может быть указана первым цветом (например, красный для высокой скорости), тогда как вторая скорость может быть указана вторым цветом (например, синим для низкой скорости) соответствующего источника света (промежуточные значения могут быть указаны комбинацией двух цветов). Согласно одному варианту реализации источник света может быть реализован посредством интеллектуального текстиля, например, боксерской перчатки, изменяющих цвет предметов одежды. Интеллектуальный текстиль представляет собой ткани, которые обеспечивают возможность встраивания в них вычисляющих цифровых компонентов и электронных схем. Таким образом, интеллектуальный или электронный текстиль может быть разделен на две основных категории, т.е. Е-текстиль с классическими электронными устройствами, такими как проводящие проводники, интегральные схемы, светоизлучающие диоды (LED) и известные батареи, встроенные в предметы одежды. Эти ткани относятся к общему типу е-тканей. Кроме того, известен Е-текстиль с современной электронной схемой, выполненной непосредственно из текстильных волокон. Он может включать пассивные электронные схемы, такие как провода из чистого металла, проводящие текстильные волокна или более сложные электронные схемы, такие как транзисторы, диоды и солнечные элементы. Разумеется, также могут быть предусмотрены способы отображения скорости, такие как числовое отображение скорости перчатки на поверхности перчатки. В таких вариантах реализации соответствующая обработка сигналов и также, следовательно, оценка скорости могут быть осуществлены непосредственно в соответствующей обрабатывающей схеме, установленной в боксерской перчатке или на ней. Кроме того, необходимо гарантировать, что встроенные материалы не создают дополнительную угрозу для здоровья боксера, носящего перчатку, или его противника.
[00105] Дополнительные варианты реализации обеспечивают возможность встраивания отображения, указывающего на оцененную скорость, в записанные или непосредственно транслируемые данные, такие как видеозаписи или прямые телевизионные трансляции спортивных событий. В настоящей заявке также предусмотрена центральная оценка скорости посредством центрального процессора, расположенного на расстоянии от боксерской перчатки.
[00106] С использованием вариантов реализации настоящего изобретения наблюдатель спортивного события может усилить свое ощущение наблюдаемых скоростей и потенциальных ударов. То же самое относится и к самому спортсмену и/или его тренеру во время боя или тренировки. Отображение скорости цветовыми кодами или подобными способами обеспечивает возможность мгновенной обратной связи и возможности адаптации стратегии боя или тренировки. Если оцененная скорость или соответствующее отображение показывает, что удары становятся медленнее, это может указывать на то, что спортсмен устал. В этом случае могут быть приняты соответствующие ответные меры.
[00107] Кроме того, с использованием вариантов реализации способов и устройств согласно настоящему изобретению могут быть определены дополнительные статистические характеристики, такие как частота ударов, информация относительно активных действий и/или бездействия или расход энергии спортсмена. Для тренировочных целей также может быть использована акустическая сигнализация.
[00108] Согласно вариантам реализации определение скорости может быть дополнено определением дополнительных сопутствующих статистических показателей во время боя или после него, таких как, например:
- скорость и/или тип удара в форме графика зависимости от времени или гистограммы,
- количество и распределение ударов (на кулак),
- частота ударов,
- количество или число пропущенных ударов,
- генерируемая спортсменом механическая энергия,
- активность спортсмена,
- работа ног,
- и т.п.
[00109] Как указано выше, описание и сопроводительные чертежи просто иллюстрируют принципы настоящего изобретения. Таким образом, следует понимать, что специалисты сами смогут проектировать различные конфигурации настоящего изобретения, и несмотря на то, что эти конфигурации явно не описаны или показаны в настоящей заявке, они осуществляют принципы настоящего изобретения и включены в объем защиты настоящего изобретения. Кроме того, все примеры, описанные в настоящей заявке, принципиально предназначены явным образом служить читателю только в качестве объяснения, облегчающего понимание принципов настоящего изобретения и вклада, внесенного изобретателем (изобретателями) в усовершенствование уровня техники, который, таким образом, следует рассматривать как неограниченный этими конкретными описанными примерами и условиями. Кроме того, все заявления в настоящей заявке, излагающие принципы, аспекты и варианты реализации настоящего изобретения, как и конкретные примеры настоящего изобретения также охватывают и его эквиваленты.
[00110] Функции различных элементов, показанных на чертежах, включая любые функциональные блоки, могут быть реализованы с помощью выделенных аппаратных средств, таких как "процессор", "электронное управляющее устройство" и т.п., а также аппаратных средств, выполненных с возможностью исполнения программы при взаимодействии с соответствующим программным обеспечением. Кроме того, любой объект, описанный в настоящей заявке, такой как "средство", может соответствовать "одному или большему количеству модулей", "одному или большему количеству устройств", "одному или большему количеству блоков" или может быть реализован в форме всего перечисленного и т.п. В случае использования процессора, функции могут быть реализованы посредством одиночного выделенного процессора, одиночного совместно используемого процессора или множества отдельных процессоров, некоторые из которых могут быть использованы совместно. Кроме того, явное использование термина "процессор" или "электронное управляющее устройство" не должно рассматриваться как относящееся исключительно к аппаратным средствам, выполненным с возможностью исполнения программы, и может неявно включать без ограничения аппаратный процессор цифровых сигналов (DSP), сетевой процессор, прикладную специализированную интегральную схему (ASIC), программируемую пользователем вентильную матрицу (FPGA), постоянное запоминающее устройство (ПЗУ) для сохранения программного обеспечения, оперативное запоминающее устройство (ОЗУ) и энергонезависимое запоминающее устройство. Также в этот список могут быть включены другие традиционные и/или разработанные пользователем аппаратные средства.
[00111] Специалистам понятно, что любые принципиальные схемы в настоящей заявке представляют собой концептуальные виды иллюстративной схемы, реализующей принципы настоящего изобретения. Схожим образом, следует понимать, что любые блок-схемы, функциональные схемы, диаграммы состояний, псевдокод и т.п. представляют различные процессы, которые по существу могут быть сохранены в читаемой компьютером среде и также выполнены с использованием компьютера или процессора, независимо от того показан или не показан явно такой компьютер или процессор на чертежах.
[00112] Кроме того, следующие ниже пункты настоящим включены в данное подробное описание, в котором каждый пункт может быть представлен индивидуально в качестве отдельного варианта реализации. Несмотря на то, что каждый пункт может быть представлен индивидуально в качестве отдельного варианта реализации, следует отметить, что несмотря на то, что зависимый пункт в формуле может относиться к конкретной комбинации с одним или большим количеством других пунктов, другие варианты реализации также могут включать комбинацию зависимого пункта с предметом настоящего изобретения каждого другого зависимого пункта. Такие комбинации предполагаются в настоящей заявке, если однозначно не указано, что данная конкретная комбинация не предназначена для этого. Кроме того, также предполагается включение признаков пункта любого другого независимого пункта, даже если этот пункт непосредственно не является зависимым от независимого пункта.
[00113] Кроме того, следует отметить, что способы, описанные в настоящей заявке или пунктах приложенной формулы, могут быть реализованы посредством устройства, содержащего средство для исполнения каждого из соответствующих этапов этих способов.
[00114] Кроме того, следует подразумевать, что описание множества этапов или функций, представленных в настоящей заявке или пунктах приложенной формулы, необязательно должны быть исполнены в конкретном порядке. Таким образом, описание множества этапов или функции не ограничивается конкретным порядком их исполнения, если такие этапы или функции не являются взаимозаменяемыми по техническим причинам. Кроме того, согласно некоторым вариантам реализации одиночный этап может включать множество подэтапов или может быть разделен на множество подэтапов. Такие подэтапы могут быть включены в описание данного одиночного этапа и являются его частью, если явно не указано иное.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРЕНАЖЕР (ВАРИАНТЫ) | 2000 |
|
RU2201783C2 |
| ТРЕНАЖЕР | 2000 |
|
RU2201784C2 |
| Способ интерактивной тренировки (варианты) и устройство для его осуществления (варианты) | 2019 |
|
RU2830939C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИНАМИЧЕСКИХ ПАРАМЕТРОВ УДАРА, ХАРАКТЕРИЗУЮЩИХ СИЛУ | 2006 |
|
RU2322279C1 |
| ТРЕНАЖЕР-СИЛОМЕР ДЛЯ ИЗМЕРЕНИЯ ДИНАМИЧЕСКИХ ПАРАМЕТРОВ УДАРА | 2007 |
|
RU2359728C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ РАБОЧЕГО ОРГАНА МАШИНЫ | 2014 |
|
RU2566153C1 |
| ТРЕНАЖЕР ДЛЯ РУК | 2001 |
|
RU2201782C1 |
| Устройство для тренировки боксеров Родионова В.Л. | 1990 |
|
SU1733025A1 |
| Устройство для тренировки и судейства боксеров | 1990 |
|
SU1773423A1 |
| Тренажер для отработки реакции спортсмена на двигающийся объект | 2018 |
|
RU2723252C1 |
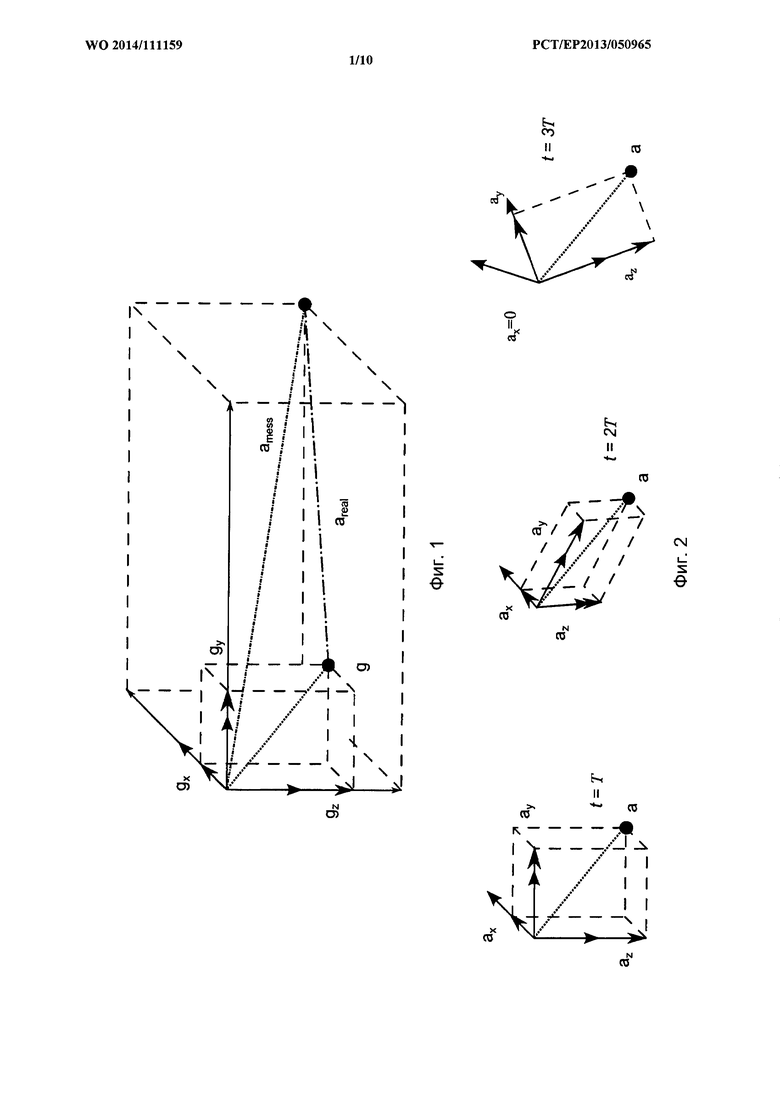

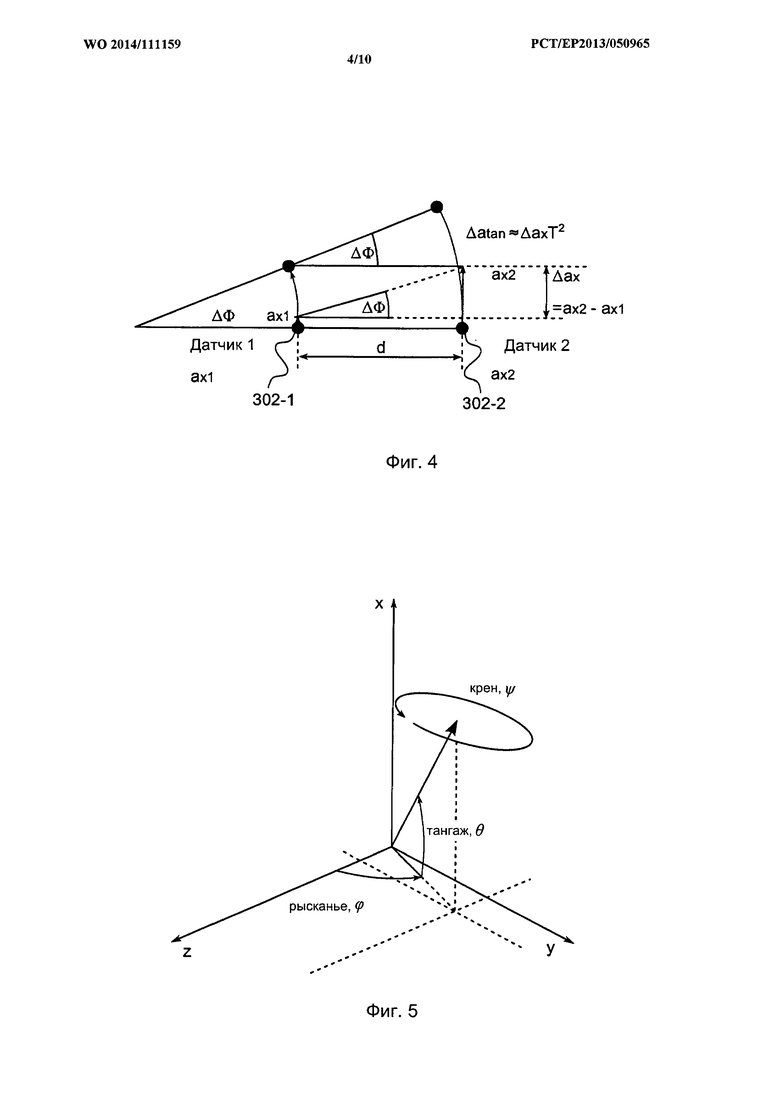


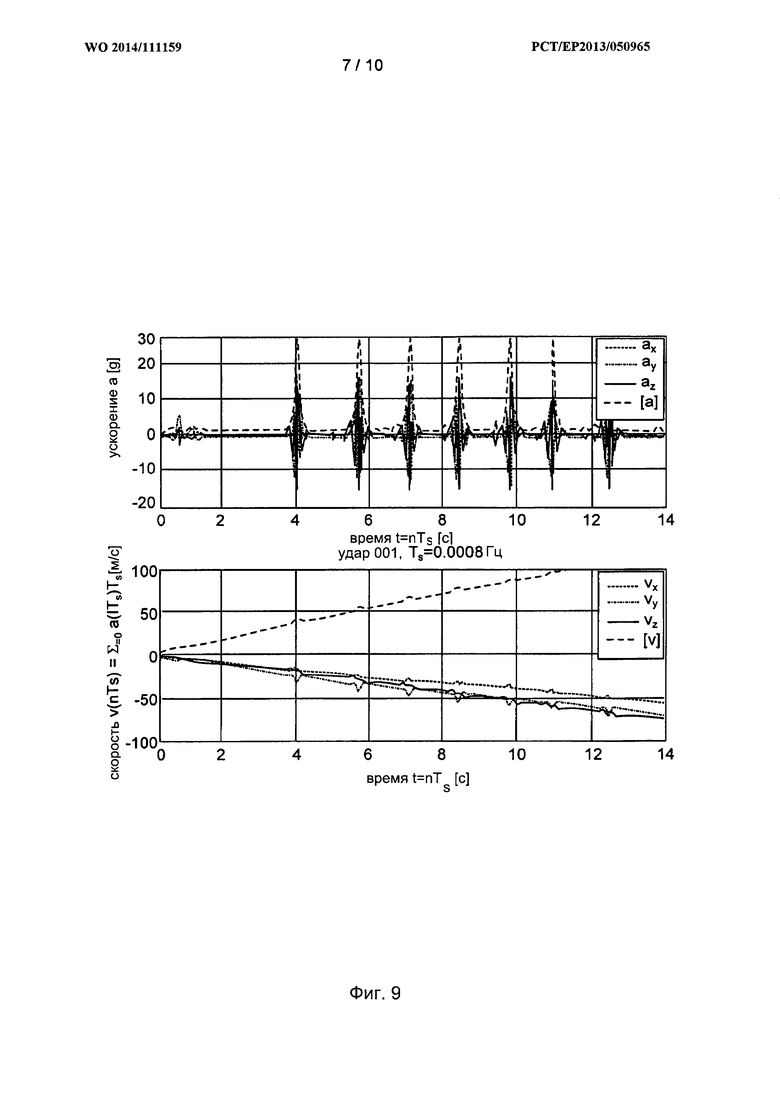
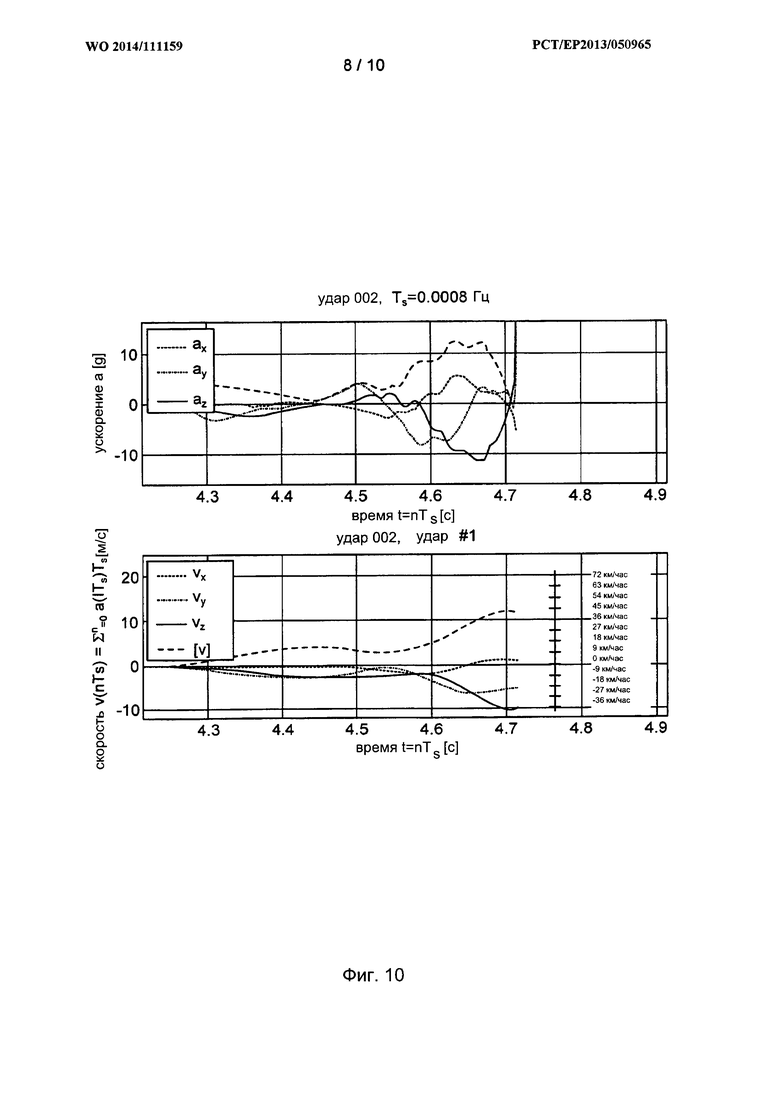
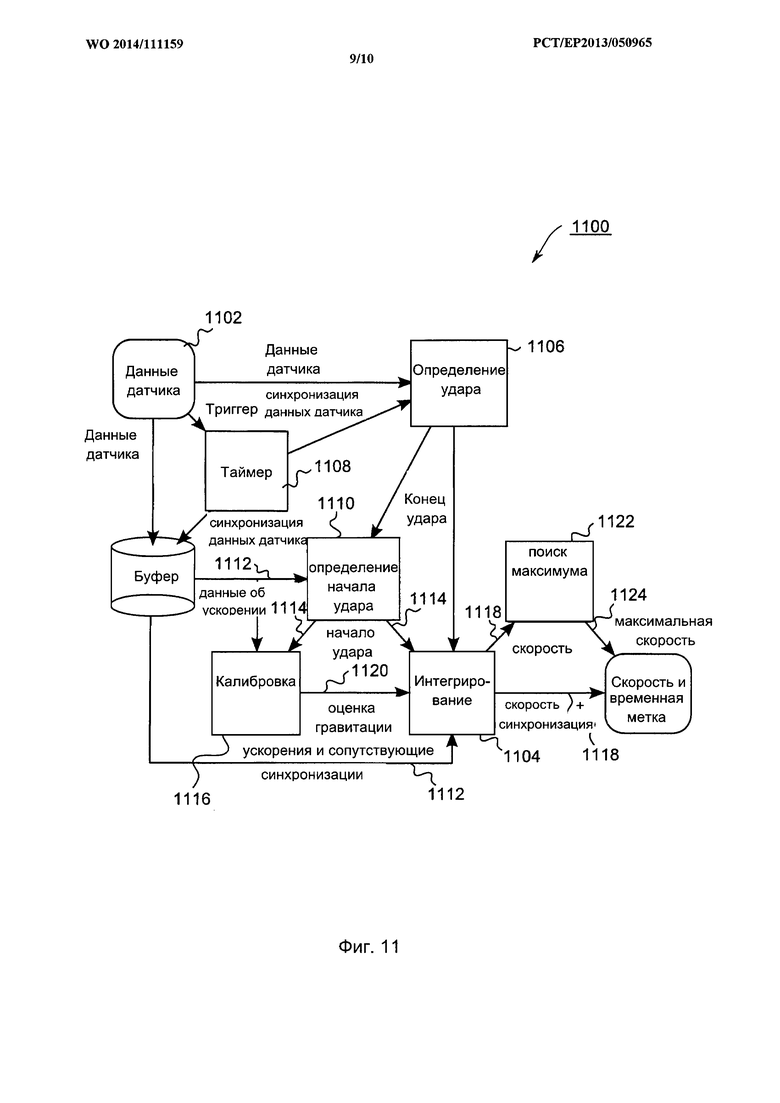
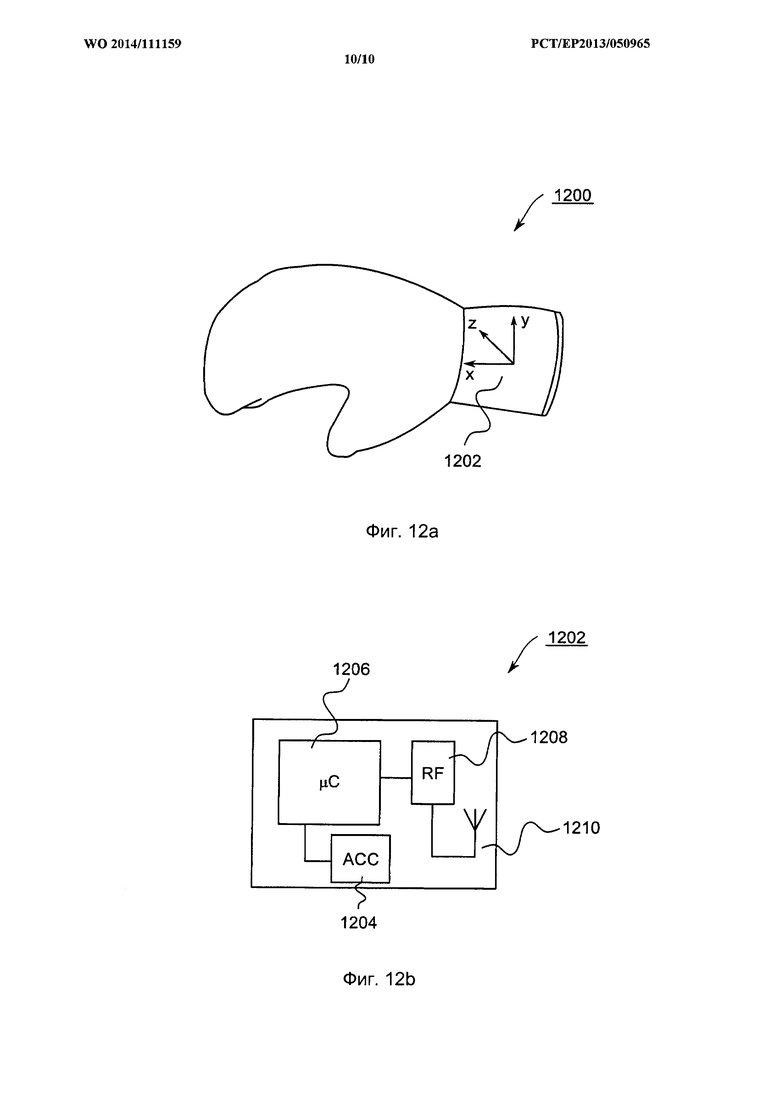
Изобретение относится к способам и устройствам для определения скорости перемещения спортсмена. Способ определения скорости перемещения спортсмена заключается в том, что на конечности спортсмена, к которой привязана локальная система координат, размещают многомерный акселерометр. На основании данных об ускорении, полученных с помощью акселерометра, определяют по крайней мере одно корректирующее значение скорости, используемое для компенсации возникающего при перемещении спортсмена поворота локальной системы координат относительно неподвижной глобальной системы координат. Далее данные об ускорении интегрируют и определяют скорость перемещения спортсмена. Полученное значение скорости корректируют с помощью указанного корректирующего значения скорости. Устройство для определения скорости перемещения спортсмена содержит многомерный акселерометр, размещенный на конечности спортсмена, процессор, выполненный с возможностью определения по меньшей мере одного корректирующего значения скорости на основании данных об ускорении, полученных с помощью многомерного акселерометра, и процессор, выполненный с возможностью определения скорости путем интегрирования многомерных данных об ускорении и корректировки полученного значения с помощью корректирующего значения скорости. 3 н. и 17 з.п. ф-лы, 14 ил.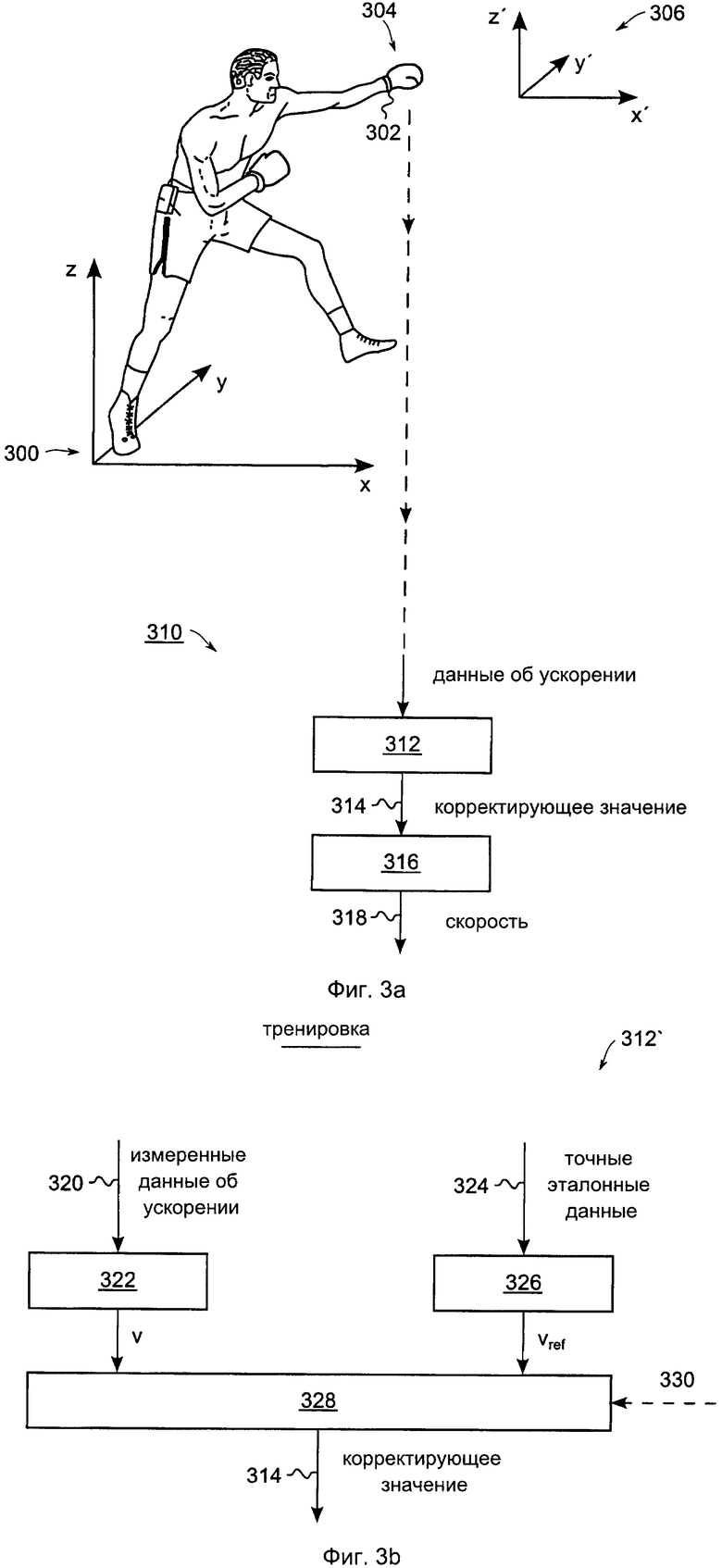
1. Способ (310) определения скорости (318, 1118) многомерного перемещения спортсмена в глобальной системе (300) координат на основании многомерных данных (320, 1102, 1112) об ускорении от многомерного акселерометра (302, 1202), размещенного на обладающей способностью поступательного и/или поворотного перемещения конечности (304, 1200) спортсмена, которая определяет локальную систему (306) координат, согласно которому:
осуществляют определение (312) на основании многомерных данных (1102, 1112) об ускорении по меньшей мере одного корректирующего значения (314) скорости, компенсирующего поворот локальной системы (306) координат относительно глобальной системы (300) координат во время многомерного перемещения, и
осуществляют определение (316) скорости (318, 1118) многомерного перемещения на основании интегрирования многомерных данных (320, 1102, 1112) об ускорении и корректируют определенное значение скорости с помощью по меньшей мере одного корректирующего значения (314) скорости.
2. Способ (310) по п. 1, согласно которому спортсменом (304, 1200) является боксер, носящий по меньшей мере одну боксерскую перчатку (1200), причем многомерным перемещением является многомерный удар боксера, а многомерный акселерометр (302, 1202) размещен в указанной по меньшей мере одной боксерской перчатке (1200).
3. Способ (310) по п. 1, согласно которому определение (312) указанного по меньшей мере одного корректирующего значения (314) скорости включает сравнение первой скорости заданного перемещения спортсмена, полученной на основании интегрирования многомерных данных (320, 1102, 1112) об ускорении для заданного перемещения спортсмена без указанного корректирующего значения (314) скорости, со второй скоростью заданного перемещения, полученной на основании эталонных данных (324) о перемещении, что приводит к наличию более точных результатов определения скорости, чем измеренные многомерные данные об ускорении, и включает определение скалярного корректирующего значения скорости на основании результата указанного сравнения.
4. Способ (310) по п. 3, согласно которому эталонные данные (324) многомерного перемещения спортсмена получены на основании системы позиционирования с помощью видеоданных или в режиме реального времени на основании анализа заданного перемещения эталонного спортсмена во время стадии (312') начального обучения указанного способа (310).
5. Способ (310) по п. 4, согласно которому определение указанного по меньшей мере одного корректирующего значения (312) скорости дополнительно включает определение масштабирующего коэффициента на основании отношения фактического анатомического размера спортсмена к анатомическому размеру эталонного спортсмена.
6. Способ (310) по п. 1, согласно которому многомерный акселерометр (302, 1202) содержит три трехосевых акселерометра, пространственно распределенных в конечности (304, 1200), причем определение (312) указанного по меньшей мере одного корректирующего значения (314) скорости включает определение, на основании данных (320, 1102, 1112) об ускорении указанных трех пространственно распределенных трехосевых акселерометров, поворота локальной системы (306) координат относительно глобальной системы (300) координат во время перемещения спортсмена для компенсации поворота путем вычислений путем соответствующего преобразования координат локальной системы (306) координат.
7. Способ (310) по п. 6, согласно которому поворот локальной системы координат определяют путем двукратного интегрирования разности между первыми данными об ускорении от первого акселерометра (302-1) и вторыми данными об ускорении от второго акселерометра (302-1) из указанных трех трехосевых акселерометров.
8. Способ (310) по п. 1, согласно которому спортсмен (304, 1200) дополнительно имеет по меньшей мере один пространственно разделенный датчик магнитного поля, в частности три пространственно разделенных датчика магнитного поля, причем определение указанного по меньшей мере одного корректирующего значения (314) скорости включает определение пространственной ориентации обладающей способностью поступательного и/или поворотного перемещения конечности (304, 1200) путем измерения изменения статического магнитного поля (810), окружающего конечность, посредством датчиков магнитного поля, при этом это измеренное изменение вызвано указанным многомерным перемещением в статическом магнитном поле (810).
9. Способ (310) по п. 8, согласно которому статическое магнитное поле (810) является искусственно генерируемым однородным магнитным полем.
10. Способ (310) по п. 1, согласно которому определение (312) указанного по меньшей мере одного корректирующего значения (314) скорости включает исследование пространственно-временной корреляции многомерных данных об ускорении для произвольной оценки поворота локальной системы (306) координат.
11. Способ (310) по п. 1, включающий калибрование многомерных данных (320, 1102, 1112) об ускорении путем учета гравитационного ускорения.
12. Способ (310) по п. 11, согласно которому калибрование многомерных данных (320, 1102, 1112) об ускорении включает выбор по меньшей мере одного вектора многомерных данных об ускорении в период бездействия перед определением перемещения спортсмена и определение скорости многомерного перемещения на основании интегрирования многомерных данных об ускорении с учетом указанного по меньшей мере одного вектора многомерных данных об ускорении или его среднего значения.
13. Способ (310) по п. 1, включающий определение перемещения и/или периода бездействия на основании использования многомерных данных (320, 1102, 1112) об ускорении, определение превышения порога ускорения и/или определение насыщения одной или большего количества размерностей многомерных данных об ускорении и/или определение колебания данных об ускорении.
14. Способ (310) по п. 13, согласно которому определение многомерного перемещения основано на определении превышения порога ускорения в течение заданного периода времени.
15. Способ (310) по п. 13, согласно которому определение многомерного перемещения включает определение конца перемещения путем определения точки насыщения одной или большего количества размерностей многомерных данных об ускорении при условии, что данные об ускорении не находились в насыщении и не превышали порог в течение заданного периода времени перед указанной точкой насыщения, и включает определение начала указанного перемещения путем выполнения поиска в обратном направлении от точки насыщения до тех пор, пока не будет определено минимальное среднее значение ускорения в многомерных данных об ускорении.
16. Способ (310) по п. 1, включающий хранение многомерных данных об ускорении и/или определенной скорости и последующую обработку сохраненных данных для анализа перемещения.
17. Способ (310) по п. 1, включающий отображение информации, характеризующей определенную скорость, на удаленном отображающем устройстве и/или на отображающем устройстве, размещенном непосредственно на спортсмене.
18. Энергонезависимый машиночитаемый носитель данных, содержащий включенный в него машиночитаемый программный код, который при его загрузке на компьютере, процессоре или программируемом аппаратном компоненте обеспечивает выполнение этапов способа определения скорости многомерного перемещения спортсмена по любому из пп. 1-17.
19. Устройство (1100) для определения скорости многомерного перемещения спортсмена в глобальной системе координат на основании многомерных данных об ускорении от многомерного акселерометра (302, 1202), размещенного на обладающей способностью поступательного и/или поворотного перемещения конечности (304, 1200) спортсмена, которая определяет локальную систему координат, причем указанное устройство содержит:
процессор (1104), выполненный с возможностью определения на основании многомерных данных об ускорении по меньшей мере одного корректирующего значения скорости, компенсирующего поворот локальной системы координат объекта относительно глобальной системы координат во время многомерного перемещения объекта, и
процессор (1104), выполненный с возможностью определения скорости многомерного перемещения объекта на основании интегрирования многомерных данных об ускорении и корректирования определенного значения скорости с помощью по меньшей мере одного корректирующего значения скорости.
20. Устройство (1100) по п. 19, в котором спортсменом является боксер, носящий по меньшей мере одну боксерскую перчатку (1200), причем многомерным перемещением является многомерный удар боксера, а многомерный акселерометр (302, 1202) и указанное устройство (1100) размещены в указанной по меньшей мере одной боксерской перчатке (1200).
| US 20100144414 A1, 10.06.2010 | |||
| Приспособление к эксцентриковому прессу для вырубки деталей из листового материала | 1936 |
|
SU51475A1 |
| US 5723786, 03.03.1998 | |||
| Устройство для распыливания жидкого топлива под давлением сжимаемого в рабочих цилиндрах двигателя внутреннего горения воздуха | 1928 |
|
SU11541A1 |
| СПОСОБ РЕГИСТРАЦИИ ДВИЖЕНИЙ ЧЕЛОВЕКА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2257846C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИНАМИЧЕСКИХ ПАРАМЕТРОВ УДАРА, ХАРАКТЕРИЗУЮЩИХ СИЛУ | 2006 |
|
RU2322279C1 |

