Изобретение относится к физкультурно-оздоровительным, учебным процессам и процессам активного отдыха в жизнедеятельности человека и может быть использовано в аттракционах для парковых зон отдыха, как новый вид спорта с принудительным воздушным эффективным приводом для фигурного разнонаправленного качания кругового маятника, в качестве тренажера и обучающего оборудования летного состава, а также для тренировки и адаптации вестибулярного аппарата.
Из уровня техники не известны маятники с воздушным приводом в точке нахождения груза, для осуществления фигурного качания, имитирующего свободный, управляемый и разнонаправленный полет человека в воздушном пространстве по существующим координатам пространства, ограниченный только изменяемой или не изменяемой длиной подвеса и качающимся на одинарном или двойном маятнике весом.
Из курса физики известен маятник, включающий точку подвеса, сам подвес или нить с грузом на ее конце (1). Здесь не происходит круговое и разнонаправленное движение груза и отсутствует воздушный высокоэффективный привод, находящийся в точке размещения груза, с вертикальными воздушными плоскостными рулями. Одновременно из того же источника (1) известен маятник, включающий точку подвеса, подвес из упругого материала пружины с грузом на конце, где его движение происходит только вверх и вниз. В известных маятниках не обеспечивается работа двойного маятника качания и растяжения нити одновременно, с воздушным приводом в точке размещения груза и рулями со штурвалом для перемещения в необходимых направлениях движения. Во всех известных маятниках отсутствуют множество предложенных реально, функциональных возможностей изобретений авторов. Отсутствуют воздушные приводы от реактивного винтового устройства с плоскостными рулями ориентации в различных существующих системах координат окружающего пространства таких, как вверх, вниз, направо, налево, вперед, вращение на месте в обе стороны, а также их одновременные различные комбинации. Не возможны безопасные имитации полетов ограниченных длиной растяжения эластичных подвесов, мощностью привода и массой грузов.
Задачей предложенных изобретений является расширение функциональных возможностей спортивного инвентаря и оборудований, тренажеров, оборудования для обучения летного состава и аттракционов маятникового типа в ранее не известной области, в том числе за счет увеличения эффективности воздушного движителя в виде радиально-лопастного винта.
К примеру, безопасная и массово доступная возможность полетов, с ощущениями опоры на воздух и маневрирования при опоре на воздушные массы во всех направлениях существующей системы координат, ограниченных лишь длиной натяжения эластичного и/или неэластичного подвеса, массой системы и мощностью привода, с высокоэффективным воздушным радиально-лопастным винтом.
Целью изобретений является создание новых ранее не известных способов работы маятника и устройства для его осуществления посредством увеличения эффективности движителя с радиально-лопастным винтом и последующим производством и выводом на рынок товаров и услуг с расширенными функциональными возможностями и потребительскими качествами спортивного инвентаря и оборудований, тренажеров, оборудования для обучения летного состава и аттракционов маятникового типа. К примеру, обеспечить безопасную и массово доступную имитацию полетов в ограниченном нитью воздушном пространстве, с возможностью ощущения опоры на воздух и маневрирования при опоре на воздушные массы во всех направлениях существующей системы координат, ограниченных лишь длиной натяжения эластичного и/или неэластичного подвеса и мощностью привода.
Вариант 1. Технический и технологический результат достигается тем, что способ работы маятника, используемого в качестве аттракциона или тренажера, с точкой подвеса, подвесом и грузом в нижней части, при этом точку подвеса выполняют с круговым шарниром, а в нижней части подвеса вместо груза подвешивают и вращают на отдельном узле место размещения человека с приводом от мускульной или другой механической энергии. Далее от этого привода вращают вал и затем осевой винт с лопастями классической формы или преимущественно в форме сектора или части сектора окружности с правильной или овальной конфигурацией по краям. На противоположном от оси вращения крае лопасти ограничивают поперечной поверхностью смещение воздушных масс от центра или захватывают такой же поверхностью, лопаточного типа, воздух из боковой части, при этом высота ограничивающей поверхности равна или больше шага лопасти. Далее воздух концентрируют и уплотняют в рабочую полость ротора так, что под напором образуют реактивный поток, которым перемещают груз на маятнике или место размещения человека в противоположном этому напору, и необходимых по желанию человека направлениях, с помощью системы управления от штурвала, и это обеспечивают и ориентируют по крайней мере одним воздушным плоскостным вертикальным рулем, который крепят к системе на выходе плотного потока воздуха, также в случае необходимости улучшения маневренности дополнительно устанавливают воздушный руль в передней части или по бокам системы, который применяют, при движении от возникающего встречного потока воздуха. Для обеспечения безопасности вращающиеся детали ограждают поверхностью с сеточным или щелевым жестким материалом, а человека пристегивают ремнями.
Для предотвращения обрыва от трения подвес или нить в верхней части предлагаемого маятника выполняют с круговым шарниром 1, на Фиг. 1, или с возможностью поворота в 360 градусов вокруг вертикальной оси, и под некоторым углом с целью отклонения нити или, к примеру металлического троса, при качении. Трос, вместо нити 2, желательно на практике должен быть многожильным с целью обеспечения прочности и гибкости. В нижней части троса или подвеса на отдельном узле 3 вращения или на шарнире вращения закрепляют место 4 для размещения человека, которое может быть выполнено ранцевого типа со всеми: приводом, вентилятором, рулями ориентации и штурвалом управления. Ногами, как, например, на велосипеде, через привод 5 или через аккумулятор и электротягу, двигатель внутреннего сгорания осуществляют вращение вала 6. В свою очередь на этом валу вращают осевой винт, вентилятор 7 или силовой толкающий винт с лопастями 8 классической формы, как устанавливающихся на самолетах, или преимущественно в форме сектора, на Фиг. 3 и Фиг. 4, или части сектора окружности с правильной или просто овальной конфигурацией по краям. Правильная конфигурация означает совпадение дуги окружности с центром оси вращения лопасти. Овальная форма предполагает несовпадение или частичное совпадение дуги с центром оси вращения. На противоположном крае лопасти от оси вращения ограничивают, к примеру перпендикулярной плоскостью или поверхностью 9 смещение воздушных масс воздуха, захватываемого лопастью, от воздействия центробежных сил, иначе воздух выбрасывается от оси вращения наружу. Выброс воздушной массы по радиусу винта наружу является недостатком их в классическом исполнении, согласно существующим законам физики для любой массы тела или среды, лежащих на вращающейся поверхности. При этом высоту ограничивающей поверхности b выполняют равной, к примеру показано на Фиг. 4, или большей, чем шаг h лопасти винта, поскольку в случае меньшей высоты воздушная среда будет перетекать через этот ограничитель, с уменьшением предполагаемого эффекта. Для смещения воздушной массы к центру вращения винта, как вариант, ограничивающую поверхность 18 выполняют с уменьшающимся радиусом вдоль длины установки на краю лопасти, на Фиг. 3 показано пунктирной линией, с целью дополнительного захвата воздуха от периферии или из боковой части системы. Выполнение лопастей винта, как два в одном, по второму варианту с формой сектора или его части, снабженной поперечной поверхностью 9 или 18, позволяет уменьшить габариты или размеры самого ротора, винтовой площади окружности, и эффективность по сравнению с классическими винтами по первому варианту. Таким образом, высокоэффективный радиально-осевой винт одновременно работает, как лопаточное колесо (2) с помощью поперечной поверхности 18 или по крайней мере как ограничитель 9 от выбрасывания уплотненной воздушной среды вдоль и за пределы радиуса лопасти. Далее действием толкающего винта воздух забирают с фронтальной и боковой части системы, концентрируют и уплотняют в рабочую полость 10 ротора так, что под напором образуют реактивный поток, которым перемещают груз или человека со всем оборудованием вместо груза в противоположном от потока и необходимых направлениях по траектории качания маятника. С помощью системы управления от штурвала 11 по Фиг. 1, Фиг. 2, через механические и/или гидравлические приводы, которые показаны условно пунктирными линиями, ориентируют и управляют по крайней мере одним плоскостным вертикальным воздушным рулем 12, который крепят к системе на выходе плотного потока воздуха. Установка второго вертикального параллельного руля на выходном потоке воздуха позволяет увеличить управляемость системы человек - подвес на траекториях качания маятника. В случае необходимости, для еще большей маневренности и управляемости, дополнительно устанавливают вертикальный воздушный руль в передней части, который применяют с появлением встречного потока воздуха при движении системы.
Для обеспечения безопасности способа и устройства применяют дублирование каждого узла устройства по прочности, а также двойной независимой страховкой троса или подвеса, вращающиеся детали ограждают каркасом из сетчатого или щелевого материала, а человека пристегивают ремнями безопасности к месту его нахождения. Возможно исполнение места размещения человека в виде компактного ранцевого типа, не загромождая в целом систему каркасом.
Осуществление изобретения производится следующим образом: берут точку подвеса классического маятника и выполняют ее с круговым шарниром, с возможностью поворота подвеса или троса на 360 градусов и под определенным углом к горизонтали, а в нижней части подвеса вместо груза подвешивают и вращают на отдельном узле место размещения человека. Устанавливают привод с мускульной или другой механической энергией, через него вращают вал и далее осевой винт с лопастями классической формы или преимущественно в форме сектора или части сектора окружности с правильной или овальной конфигурацией по краям. На противоположном крае от оси вращения ограничивают смещение наружу по радиусу воздушной массы захватываемой лопастью или более того дополнительно забирают ее из боковой части, при этом высота ограничивающей поверхности равна или больше шага лопасти. Далее рабочее тело концентрируют и уплотняют в рабочую полость ротора так, что под напором воздуха образуют реактивный поток, которым перемещают всю висящую систему в противоположном от потока, и необходимых для человека направлениях, с помощью системы управления от штурвала, что обеспечивают и ориентируют по крайней мере одним воздушным плоскостным рулем, который крепят к системе на выходе плотного потока воздуха. В случае необходимости лучшей управляемости дополнительно в передней части системы устанавливают еще по крайней мере один руль, который применяют при движении. Для обеспечения безопасности все важные несущие узлы дублируют или страхуют техническим способом, вращающиеся детали ограждают сеточным или щелевым материалом, а человека пристегивают ремнями. Находящийся в покое маятник приводят в движение таким образом, человек движением своих мускул или от другого вида энергии, к примеру от аккумулятора электрической энергии, вращает винт с высокоэффективными лопастями через приводной вал. Образуют реактивный напор плотного воздуха, который забирают с передней и как вариант из боковой части системы затем выбрасывают наружу с определенной силой. Под действием этой силы подвешенная система с человеком начинает и продолжает двигаться в другом противоположном направлении. В начале движения и при малой скорости движения направление перемещения регулируют воздушным плоскостным рулем, расположенным на выходе плотного потока воздуха или в задней части, им можно совершать вращательные движения на месте свисания или по малому кругу траектории перемещения системы по или против часовой стрелки. После достижения значительной скорости перемещения в виде качания или кругового движения, в случае необходимости дополнительно регулируют направление движения с помощью переднего вертикального воздушного плоскостного руля, как совместно с задним, так и в отдельности, тем самым описывают с большей амплитудой замкнутые качательные перемещения и/или вращательные движения человеком в маятниковой системе, ограниченной длиной подвеса или троса, мощностью прилагаемой энергии и массой системы груза данного маятника. Существует классическая зависимость, чем длиннее подвес или нить маятника, тем большее величиной перемещение или отклонение сможет совершить человек, при одинаковых прилагаемых усилиях и массе груза. Замкнутые формы и фигуры качения защищены отдельным авторским правом.
Вариант 2. Технический и технологический результат достигается тем, что найден и предложен авторский способ работы маятника, включающего точку подвеса, подвес или нить и груз в нижней части, при этом подвес полностью или частично по длине выполняют упругим из эластичного и плавно растягивающегося материала, к примеру резинового материала, тем самым расширяют возможности перемещения системы вдоль по направлению подвеса, точку подвеса выполняют с круговым шарниром, а в нижней части подвеса вместо груза подвешивают и вращают на отдельном узле место размещения человека с приводом от мускульной или другой механической энергии. Далее от этого привода вращают вал и затем осевой вентилятор с лопастями классической формы или преимущественно в форме сектора или части сектора окружности с правильной или овальной конфигурацией по краям. На противоположном от оси вращения крае лопасти ограничивают смещение воздушной массы от центра радиальной поверхностью или как другой вариант забирают из боковой части к центру воздух, при этом высота ограничивающей поверхности равна или больше шага лопасти. Далее воздух концентрируют и уплотняют в рабочую полость ротора так, что под напором воздуха образуют реактивный поток, которым перемещают груз на маятнике или место размещения человека в противоположном от направления потока и необходимых по его желанию направлениях, с помощью системы управления от штурвала, и это обеспечивают и ориентируют по крайней мере одним воздушным плоскостным вертикальным и горизонтальным рулями, которые крепят к системе на выходе плотного потока воздуха. В случае необходимости дополнительно устанавливают воздушные вертикальный и горизонтальный рули в передней части или по бокам системы, которые применяют при движении от возникающего встречного потока воздуха. Возможность перемещения системы в направлениях вдоль подвеса снижают или поднимают, для этого устанавливают отдельный воздушный плоскостной горизонтальный руль 16 на выходе плотного потока воздуха, дополнительно в передней части или как вариант в боковой части устанавливают горизонтальные воздушные рули 17 для вертикального перемещения системы груза в виде человека с приводом и рулями управления. Все воздушные плоскостные рули работают от штурвала в необходимой последовательности и комбинации в зависимости от потребного направления движения человеку или необходимой описываемой траектории фигуры простого или сложного пилотажа системы. Для обеспечения безопасности вращающиеся детали ограждают поверхностью с сеточным или щелевым жестким материалом, а человека пристегивают ремнями.
Направления движения человека вдоль эластичного, к примеру, резинового жгута на Фиг. 1 показаны противоположно направленными стрелками с правой стороны подвеса. Во избежание внезапного обрыва упругой или эластичной части подвеса дублируют резервным. Комбинация возможностей перемещения человека через привод, толкающий высокоэффективный винт, и различными рулями управления, в направлениях растягивающейся нити или жгута, а также одновременно влево, вправо, с вращением вокруг оси подвеса и другими, дает возможность ощущения простых и сложных маневров полета путем осуществления пилотажа через штурвал. Основным рулем управления системы в направлениях перемещения вдоль эластичного подвеса или из резинового материала, показан на Фиг. 1, расположенный на выходе плотного потока воздуха из рабочей полости 10 ротора, является воздушный плоскостной горизонтальный отражатель или руль 16. В случае необходимости, для обеспечения большей управляемости при движении или появлении встречного потока воздуха дополнительно устанавливают впереди еще один горизонтальный руль 17 или можно установить по бокам в виде крыльев и/или с подкрылками. Они не показаны во избежание большего загромождения схемы и чертежей на фигурах.
Осуществление изобретения производится следующим образом: Находящийся в покое маятник приводят в движение таким образом, человек движением своих мускул или от другого вида энергии, к примеру от аккумулятора электрической энергии, от двигателя внутреннего сгорания вращает винт с высокоэффективными лопастями, через приводной вал. Образуют реактивный напор плотного воздуха, который забирают с передней, фронтальной и как вариант из боковой части системы, затем выбрасывают наружу с определенной силой. Под действием этой силы подвешенная система с человеком начинает и продолжает двигаться в другом, противоположном направлении. В начале движения и при малой скорости движения направление перемещения регулируют воздушными плоскостными вертикальным и горизонтальным рулями, расположенным на выходе плотного потока воздуха или в задней части, ими можно совершать отдельно вращательные движения на месте висения или по малому кругу траектории перемещения системы, по или против часовой стрелки, также перемещения вверх и вниз вдоль эластичного, к примеру резинового жгута или одновременно первые и вторые виды движения. После достижения значительной скорости перемещения или полетов в виде качания, в том числе вдоль эластичного подвеса, или кругового движения, в случае необходимости дополнительно регулируют направление движения с помощью передних вертикальных и/или горизонтальных воздушных плоскостных рулей, как совместно с задними, так и в отдельности, тем самым описывают замкнутые качательные, в том числе вдоль эластичного подвеса или жгута из резины, перемещения и/или вращательные движения человеком в маятниковой системе, ограниченной длиной упругого или неупругого подвеса, мощностью прилагаемой энергии и массой системы груза данного маятника. Замкнутые формы и фигуры качения во всех существующих системах координат для устройства защищены отдельным авторским правом.
3. Устройство для осуществления работы маятника. Технический результат изобретения устройство для осуществления работы маятника достигается тем, что он выполнен с круговой шарнирной точкой подвеса в верхней части, с упругим или неупругим подвесом и с местом размещения человека на отдельном узле вращения в нижней части, с мускульным или другим механическим приводом вращения на вал с осевым воздушным винтом и лопастями с ограничительными поверхностями по концам, с помощью которых нагнетается воздух из фронтального и бокового пространства и выталкивается наружу в виде плотного реактивного потока и воздушными плоскостными вертикальными и горизонтальными рулями управления заднего и переднего размещения, угол отклонения которых осуществляется через штурвал.
Устройство для работы маятника выполнено следующим образом (Фиг. 1 и Фиг. 2): верхняя точка 1 подвеса маятника выполнена с круговым шарниром для предотвращения износа в месте перегиба троса или нити и с целью выдерживания значительных нагрузок от принудительного и ускоренного качания. Подвес 2 может быть целиком выполнен из неупругих материалов, к примеру из многожильного металлического троса с гибкими свойствами. Возможно выполнение подвеса по длине частично из неупругого и частично из упругого материала, к примеру часть из металлического троса, а часть из резинового эластичного материала с целью определенной возможности перемещения человека с системой по направлению натяжения подвеса. И последний вариант выполнения подвеса полностью из упругого материала, к примеру из резинового прочного материала, для возможности значительного расстояния перемещения человека вдоль по направлению подвеса. Через отдельный узел 3 вращения подвес маятника в нижней части соединен с местом 4 размещения человека. Шарнир позволяет выполнять независимые поворотные и вращательные движения человека вместе с местом крепления, как левые, так и правые. Для принудительного разнонаправленного перемещения качания устройство выполнено с мускульным или другим механическим приводом 5 вращения на вал 6 с осевым воздушным винтом 7 и лопастями 8 с ограничительными поверхностями 9 и 18 по концам, с помощью которых нагнетается воздух из фронтального и бокового пространства и выталкивается наружу в виде плотного реактивного потока. Винт выполнен с высокоэффективными лопастями 8 в виде секторов или части секторов окружности, на Фиг. 3 и Фиг. 4. С целью предотвращения выбрасывания плотных масс воздуха по концам винтов под воздействием центробежных сил по краям лопастей выполнены ограничительные поверхности 9 или как вариант забирающие воздух из боковой части системы поверхности 18, высота которых больше или равна шагу лопастей. Таким образом, винт является особым высокоэффективным, как два в одном, одновременно через лопасти 8 и радиальную поверхность 9 на ней, как ограничивающей 9 от смещения воздуха от центра на периферию или как захватывающей 18 воздух из периферии к центру работает в виде радиально-лопастного концентратора воздушного потока, без больших потерь по бокам. Изменение направления движения человека в ограниченном пространстве обеспечивается воздушными плоскостными вертикальными 12, 13 и горизонтальными 16, 17 рулями управления заднего и переднего размещения, угол отклонения которых осуществляется через штурвал 11.
Осуществление изобретения. Для осуществления способа работы маятника он выполнен с шарнирной круговой точкой 1 подвеса 2 в верхней части, с упругим и/или неупругим подвесом 2, на отдельном узле 3 вращения с местом 4 размещения человека в нижней части и с мускульным или другим механическим приводом 5 вращения на вал 6 с осевым воздушным винтом 7 и лопастями 8 с ограничительными поверхностями 9 по концам, с помощью которых нагнетается воздух из фронтального и бокового пространства и выталкивается наружу в виде плотного реактивного потока с воздушными плоскостными вертикальными 12, 13 и горизонтальными 16, 17 рулями управления заднего и переднего размещения, угол отклонения которых осуществляется через штурвал 11. Маятник работает следующим образом: через мускульный или другой механический источник энергии происходит вращение высокоэффективного винта, которым забирается воздух из фронтального и бокового пространства создается плотный реактивный поток воздуха и выбрасывается наружу. Под его действием человек на маятнике вместо груза двигается в противоположном от потока направлении, при этом осуществляются фигурные и разнонаправленные полеты под действием вертикальных и горизонтальных воздушных плоскостных рулей через штурвал управления.
Краткое описание чертежей.
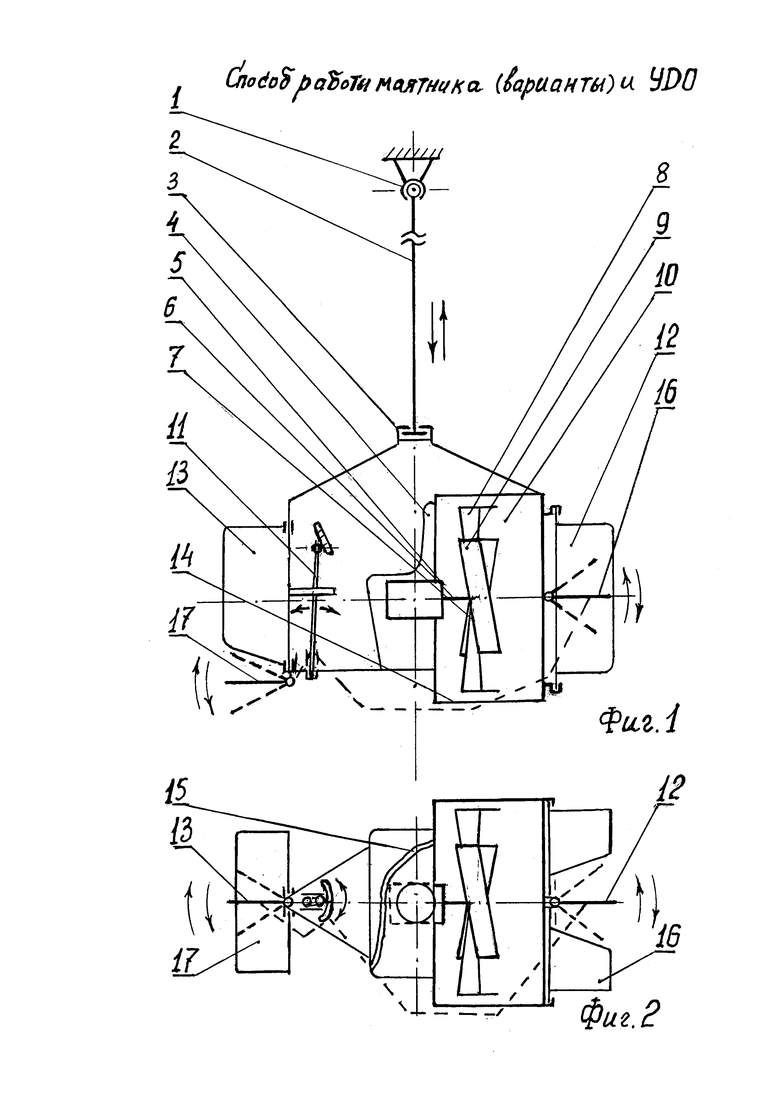
На графическом материале по Фиг. 1 изображено схематическое изложение устройства для объяснения сути и работы предлагаемого изобретения «Способа работы маятника (варианты) и устройства для его осуществления». Маятник выполнен в верхней части с шарнирной круговой точкой 1 подвеса 2. Подвес 2 может быть выполнен в трех вариантах: первый полностью упругим или, к примеру с эластичной резиновой веревкой, второй - часть подвеса по длине не упругим, допустим из троса и вторая часть из упругого резинового материала, третий - полностью из неупругого материала (троса). По правую сторону подвеса стрелками вверх и вниз показаны полностью или частично упругие варианты исполнения. Под цифрой 3 показан шарнирный или вращающийся узел подвеса, на котором крепится место 4 размещения человека в нижней части подвеса. Далее на схематическом чертеже цифрой 5 показан мускульный или другой, к примеру электрический механический, привод 5, от которого вращается вал 6 с осевым воздушным винтом 7 с лопастями 8, на конце которых имеются поверхности 9, как ограничители смещения воздуха или забирающие воздух. Показана рабочая полость ротора 10 и штурвал 11, для управления воздушными плоскостными рулями вертикального расположения, заднего 12 - основного и дополнительного под цифрой 13, а также рулями горизонтального расположения заднего 16 - основного и переднего дополнительного 17. Для обеспечения безопасности человека установлено заграждение 14. На чертеже пунктирной линией показана механическая связь штурвала с воздушными плоскостными рулями изменения направления движения человека по траекториям качания. Также на Фиг. 1 овальными стрелками показаны направления отклонения горизонтальных плоскостных воздушных рулей 16, 17 и соответствующие им наклоны штурвала 11, как и при управлении полетами в авиации.
На Фиг. 2 показано схематическое изображение устройства как вид сверху схемы по Фиг. 1. Здесь наглядно показаны стрелками отклонения вертикальных плоскостных воздушных рулей заднего 12 и переднего 13 размещения в зависимости от направления поворота дуги штурвала или самого штурвала 11, налево или направо. Пунктирной линией показана механическая или, к примеру, гидравлическая связь между задними и передними вертикальными воздушными рулями и штурвалом управления, как и при управлении полетов в авиации. Ремень безопасности 15 показан на Фиг. 2, ввиду насыщенности Фиг. 1. Показаны задний 16 и передний 17 горизонтальные воздушные рули.
На Фиг. 3 отдельно показан высокоэффективный винт 7, нагнетающий лопастями 8 с ограничивающей поверхностью 9 для воздуха от его смещения по радиусу. Возможно исполнение предложенного винта для одновременного забора и нагнетания воздуха из передней и боковых частей системы груза маятника, с этой целью на Фиг. 3 пунктирной линией 18 показано исполнение ограничивающей поверхности с уменьшающимся радиусом расположения вдоль по краю окружной части лопасти. Номер захватывающей поверхности 18 перенесен на Фиг. 3, ввиду невозможности показать на предыдущих Фиг. 1 и Фиг. 2 чертежах. Таким образом уникальность предложенного винта заключается в том, что он работает как вентилятор с осевыми лопастями 8 в виде повернутого с углом атаки сектора или части сектора окружности, забирающий воздух с передней или фронтальной части системы, и одновременно как лопаточное колесо или радиальный вентилятор воздуха с захватывающей из боковой части поверхностью 18, установленной с уменьшающимся радиусом по краю овала лопасти (2). Стрелкой показано направление вращения винта. Показано А-А, направление разреза проекции вида сверху, для наглядности величины как ограничивающей поверхности 9 или забирающей поверхности 18, как лопасти радиального - осевого вентилятора (2) в едином исполнении вариантов конструкций.
На Фиг. 4 показан предложенный высокоэффективный винт 8 с частью разреза А-А для наглядности его исполнения в конструкции и высоты ограничивающей поверхности 9, которая не может быть выполнена меньше величины шага винта на краю лопасти, во избежании потери эффективности. В противном случае забираемый лопастью воздух будет перетекать через малую высоту ограничивающей поверхности 9 в одном случае, или не полностью забирать воздух из боковой части, как поверхности 18 с функцией лопасти радиального вентилятора, в другом случае.
Способ работы маятника (варианты) и устройство для его осуществления позволяет высокоэффективно приводить в движение человека на маятнике качения во всех направлениях существующей системы координат, с описанием различных разнонаправленных пространственных фигур простого и сложного исполнения, сравнимых с полетом в ограниченном воздушном пространстве, для спортивно-оздоровительных, учебных целей, а также для активного и культурно-паркового отдыха в жизнедеятельности человека.
Предлагаемые изобретения - способ работы маятника (варианты) и устройство для его осуществления - в целом и раздельно являются новыми, имеют изобретательский уровень и промышленно применимы.
Источники информации
1. Г.Я. Мякушев, Б.Б. Буковцев «Физика» Учебник для 11 классов общеобразовательных учреждений 16-е издание, Москва, Просвещение, 2007 год, глава 3, параграф 18, стр. 52-54.
2. М.П. Калинушкин, «Вентиляторные установки» Учебное пособие для инженеров строительных вузов и факультетов, издание пятое переработанное и дополненное, Москва, Государственное издательство «Высшая школа», 1962 год.
| название | год | авторы | номер документа |
|---|---|---|---|
| Маятник Яримова | 2024 |
|
RU2838586C1 |
| Маятник Яримова | 2022 |
|
RU2792769C1 |
| Маятник Яримова | 2022 |
|
RU2801109C1 |
| СПОСОБ ИЗМЕРЕНИЯ И УЧЁТА РАСХОДА ЭНЕРГИИ И СЧЁТЧИК ЯРИМОВА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2016 |
|
RU2658088C2 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2004 |
|
RU2265726C2 |
| ДЕЗАКСИАЛЬНЫЙ КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ ЯРИМОВА | 2002 |
|
RU2267672C2 |
| СПОСОБ ДОБЫЧИ НЕФТИ | 2017 |
|
RU2645698C1 |
| СПОСОБ ЗАЩИТЫ ВОДИТЕЛЯ ОТ ОСЛЕПЛЕНИЯ | 2003 |
|
RU2271941C2 |
| СПОСОБ ПОСТРОЕНИЯ НАПРАВЛЯЮЩЕЙ КРИВОЙ ЯРИМОВА ЦИЛИНДРИЧЕСКОЙ ПОВЕРХНОСТИ РОТОРА ИЛИ КОРПУСА (ВАРИАНТЫ) | 2001 |
|
RU2202702C2 |
| СПОСОБ ТРАНСПОРТИРОВКИ НЕФТИ | 2016 |
|
RU2622119C1 |

Изобретение относится к физкультурно-оздоровительным, учебным процессам и процессам активного отдыха в жизнедеятельности человека и может быть использовано в аттракционах для парковых зон отдыха, в качестве тренажера и обучающего оборудования летного состава, а также для тренировки и адаптации вестибулярного аппарата. Мускульным или другим принудительным механическим приводом вращают лопаточно-осевой винт воздушного высокоэффективного движителя для осуществления фигурного, ограниченного длиной подвеса или нити и массой, качания в любых направлениях существующей системы координат пространства с помощью воздушных плоскостных рулей, расположенных за реактивным потоком струи воздуха и дополнительными впереди системы, через штурвал управления. Обеспечивается расширение функциональных возможностей различных аттракционов, спортивного инвентаря и оборудования, увеличение эффективности воздушного движителя, безопасность имитации полетов. 2 н. и 1 з.п. ф-лы, 4 ил.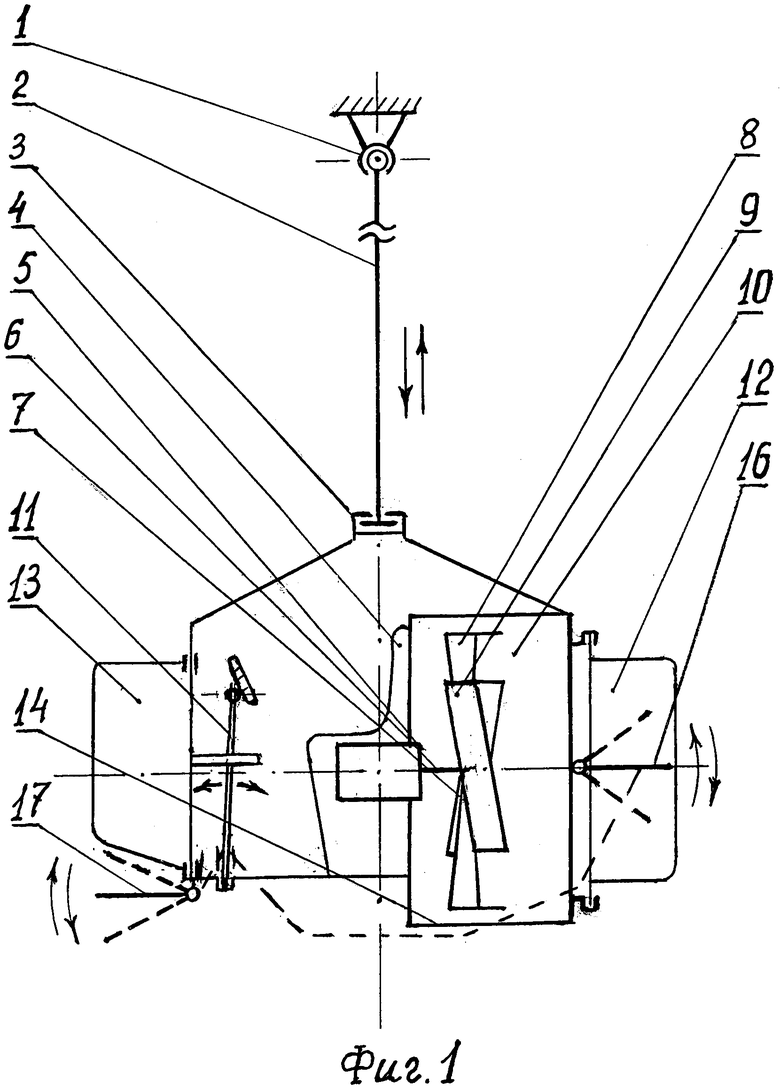
1. Способ работы маятника, используемого в качестве аттракциона или тренажера, включающего точку подвеса, подвес или нить и груз в нижней части, отличающийся тем, что точку подвеса выполняют с круговым шарниром, а в нижней части подвеса как груз подвешивают и вращают на отдельном узле место размещения человека с мускульной или другой механической энергией привода, через него вращают вал и далее осевой винт с лопастями, преимущественно в форме сектора или части сектора окружности с правильной или овальной конфигурацией по краям, на противоположном крае от оси ограничивают смещение воздушной массы от центра или захватывают лопастью к центру, при этом высота ограничивающей поверхности равна или больше шага лопасти, далее уплотняют в рабочую полость ротора и под напором воздуха образуют реактивный поток, которым перемещают груз в противоположном и необходимых направлениях с помощью системы управления от штурвала, что обеспечивают по крайней мере одним воздушным плоскостным рулем, который крепят к системе на выходе плотного потока воздуха, также при необходимости дополнительно устанавливают руль в передней части системы, который применяют при движении, для обеспечения безопасности вращающиеся детали ограждают сеточным или щелевым материалом, а человека пристегивают ремнем.
2. Способ по п. 1, отличающийся тем, что подвес или нить полностью или частично выполняют упругим, тем самым расширяют возможности перемещения системы груза вдоль по направлению эластичного подвеса, снижают или поднимают, для этого дополнительно устанавливают отдельный воздушный плоскостной горизонтальный руль на выходе плотного потока воздуха, кроме того, при необходимости в передней части системы устанавливают горизонтальные воздушные рули для вертикального перемещения системы, которые изменяют отдельно или совместно с задним плоскостным рулем, как и совместно с вариантами регулирования бокового перемещения, через штурвал.
3. Маятник, используемый в качестве аттракциона или тренажера, содержащий точку подвеса, сам подвес и груз в нижней части, отличающийся тем, что он выполнен с шарнирной круговой точкой подвеса в верхней части, с упругим или неупругим подвесом и на отдельном узле вращения местом размещения человека в нижней части, и с мускульным или другим механическим приводом вращения на вал с осевым воздушным винтом и лопастями с ограничительными поверхностями по концам, с помощью которых нагнетается воздух из бокового и фронтального пространства и выталкивается наружу в виде плотной реактивной струи, с вертикальными и горизонтальными рулями управления заднего и переднего размещения, угол отклонения которых осуществляется через штурвал.
| ВЕРТОЛЕТНЫЙ АТТРАКЦИОН | 2010 |
|
RU2430766C1 |
| АТТРАКЦИОН "БРАТИНА" | 2012 |
|
RU2517610C2 |
| КАЧЕЛИ | 2003 |
|
RU2243018C1 |
| US 20080300063 A1, 04.12.2008 | |||
| КАЧЕЛИ | 1992 |
|
RU2015703C1 |

