Область техники, к которой относится изобретение
Технология, раскрытая в данном документе, относится, в общем, к области контакторов, используемых в электрических сетях, и, в частности, к контакторам, работой которых управляет электроника.
Предшествующий уровень техники
В электрических сетях контакторы часто используются для переключения больших электрических токов. Эти контакторы предназначены для переключения нагрузочных токов, которые возникают во время нормальных условий в различных приложениях. Контактор выполнен с возможностью включать, проводить и прерывать электрический ток.
Контакторы с электромагнитным приводом обычно содержат подпружиненный якорь, перемещающийся между двумя конечными положениями. Якорь является частью электромагнитной схемы. В первом конечном положении размыкается цепь якоря, и затем размыкается токовая цепь, и во втором конечном положении цепь якоря замыкается, и затем замыкается контактор, тем самым обеспечивая электрическую цепь. Обычно контакторы являются моностабильными устройствами, и положение в нерабочем состоянии является разомкнутым положением, но иногда используются противоположные положения. Таким образом, в первом конечном положении отсутствует путь для протекания электрического тока, и электрическая цепь разомкнута, во втором положении создается путь для протекания электрического тока, и затем замыкается электрическая цепь. Перемещение якоря выполняется за счет возбуждения катушки электромагнитной схемы, причем катушка обычно намотана вокруг частей якоря или вокруг неподвижной части электромагнитной схемы.
Работа такого контактора влечет за собой подачу тока в катушку, в результате чего в электромагните создается магнитный поток. Магнитный поток притягивает якорь, который заставляет контакты контактора замыкаться. Во время замыкания (которое часто упоминается также как "включение" или "срабатывание") в катушке контактора должен протекать большой ток, так как воздушный зазор между двумя магнитными частями электромагнита является большим, и необходимо преодолеть упругую силу пружин, находящихся в якоре. При удержании контактора в замкнутом состоянии, которое обозначается "состояние удержания", воздушный зазор является маленьким, и низкое значение тока, протекающего через катушку, является достаточным.
Для того чтобы обеспечить надежное установление контакта, в катушку подается высокий ток в течение фиксированного периода времени, включающего в себя резервное время перед переключением состояния удержания при низком токе. Подача высокого тока во время замыкания создает потери и приводит к увеличению температуры в катушке, и период при высоком токе после замыкания контактора приводит к бесполезно израсходованной энергии. Бесполезно израсходованная энергия соответствует ненужному дополнительному источнику питания, что влечет за собой увеличение затрат. Рабочая энергия часто подается с помощью источников с ограниченной пропускной способностью, и поэтому желательно минимизировать используемую энергию. Бесполезно израсходованная энергия также приводит к повышению температуры в катушке, а также в других электронных компонентах, что может оказывать негативное влияние на их функциональные возможности и уменьшать их время эксплуатации.
Сущность изобретения
Задача настоящего изобретения состоит в том, чтобы решить или по меньшей мере облегчить одну или более из упомянутых выше проблем.
Задача согласно первому аспекту решается с помощью способа, который выполняется в блоке управления для замыкания контактора. Контактор выполнен с возможностью переключения между замкнутым положением, в котором ток может протекать в токовой цепи, и разомкнутым положением, в котором прерывается токовая цепь. Блок управления выполнен с возможностью обеспечения перемещения между замкнутым положением и разомкнутым положением за счет возбуждения катушки электромагнитной схемы. Способ содержит подачу напряжения на катушку; определение, в течение первого периода времени, тока, протекающего через катушку, и напряжения на катушке и оценку, основанную на этих параметрах модели для модели предсказания поведения тока, протекающего через катушку, если контактор находился в разомкнутом положении; и измерение, после окончания первого периода времени, тока, протекающего через катушку, и определение разности между, с одной стороны, измеренным током и, с другой стороны, предсказанным током модели, и повторение измерения и определения до тех пор, пока не обнаружится изменение состояния из разомкнутого положения в замкнутое положение с помощью разности токов.
Способ замыкания контактора позволяет использовать пониженную энергию срабатывания, и, таким образом, обеспечивается более низкое потребление энергии. Это позволяет снизить затраты за счет снижения потребности в источнике электропитания, например, за счет ослабления требования к батареям конденсаторов или их размерам. Пониженный непроизводительный расход энергии также позволяет уменьшить температуру в катушке и других электронных элементах, продлевая время работы, а также функционирование. Это, в свою очередь, также дает возможность контактору работать на более высоких рабочих частотах, то есть с более высокой периодичностью или коэффициентом использования.
Задача согласно второму аспекту решается с помощью блока управления для замыкания контактора. Контактор имеет возможность перемещения между замкнутым положением, в котором ток может протекать в токовой цепи, и разомкнутым положением, в котором прерывается токовая цепь. Блок управления выполнен с возможностью обеспечения перемещения между замкнутым положением и разомкнутым положением за счет возбуждения катушки электромагнитной схемы. Блок управления выполнен с возможностью: подачи напряжения на катушку; определения, в течение первого периода времени, тока, протекающего через катушку, и напряжения на катушке и оценки на этом основании параметров модели для модели предсказания поведения тока, протекающего через катушку, если контактор оставался в разомкнутом положении; и измерения, после окончания первого периода времени, тока, протекающего через катушку, и определения разности между, с одной стороны, измеренным током и, с другой стороны, предсказанным током модели, и повторения измерения и определения до тех пор, пока не будет обнаружено изменение состояния из разомкнутого положения в замкнутое положение с помощью разности токов.
Дополнительные признаки и преимущества настоящего изобретения станут ясны из последующего подробного описания и сопроводительных чертежей.
Краткое описание чертежей
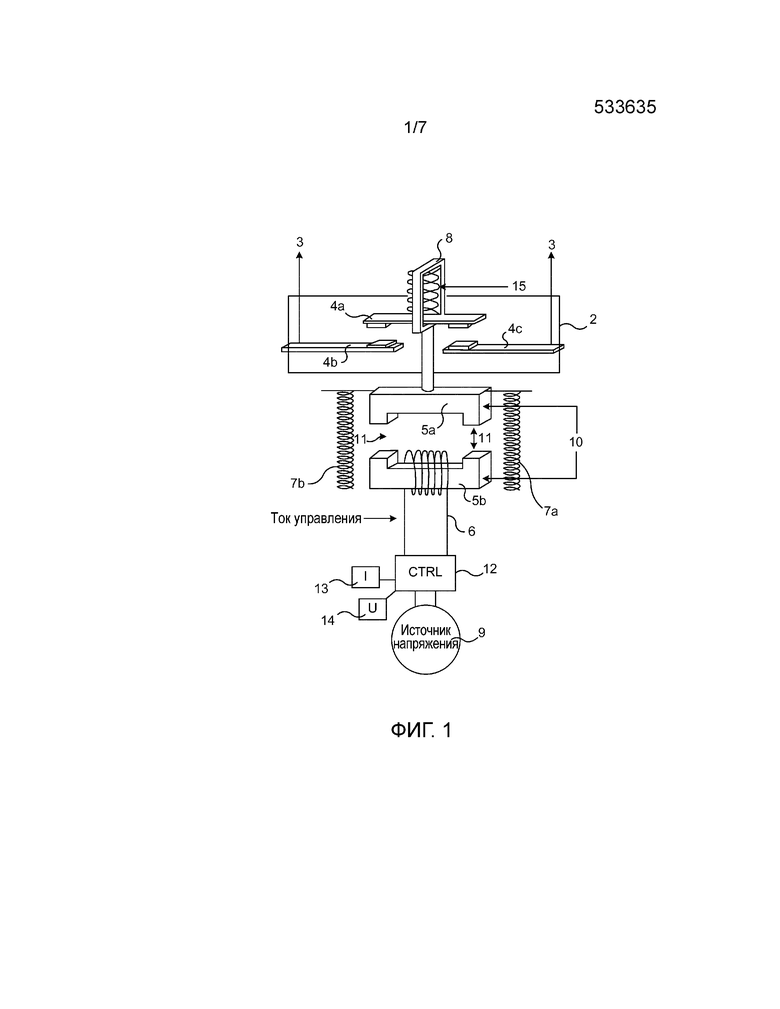
Фиг.1 иллюстрирует контактор с электромагнитным приводом.
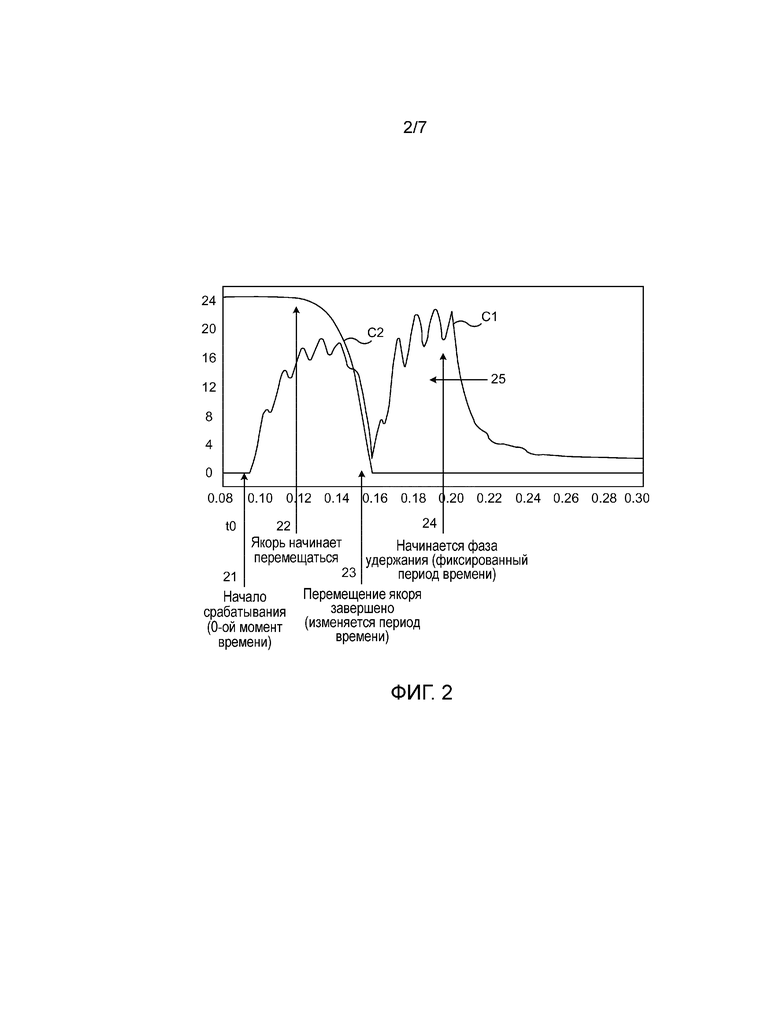
Фиг.2 иллюстрирует графики зависимости между током, протекающим через катушку, и перемещением держателя во время процедуры замыкания.
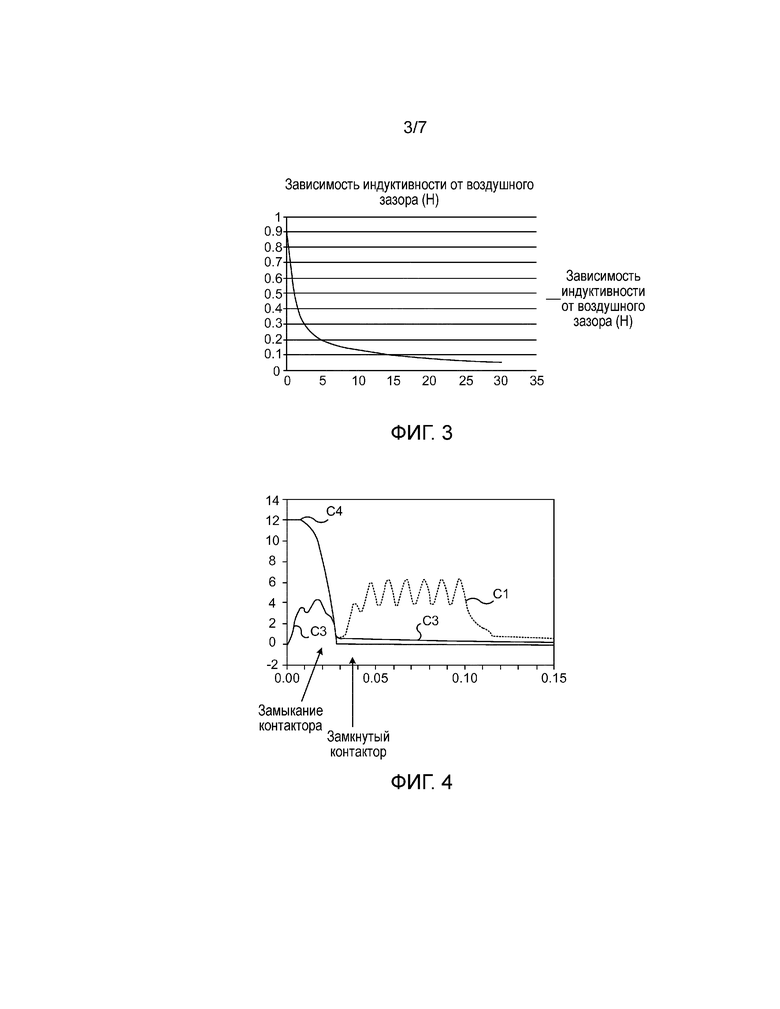
Фиг.3 иллюстрирует график зависимости индуктивности катушки от перемещения держателя.
Фиг.4 иллюстрирует график зависимости тока катушки от перемещения держателя во время процедуры замыкания согласно аспекту настоящего изобретения.
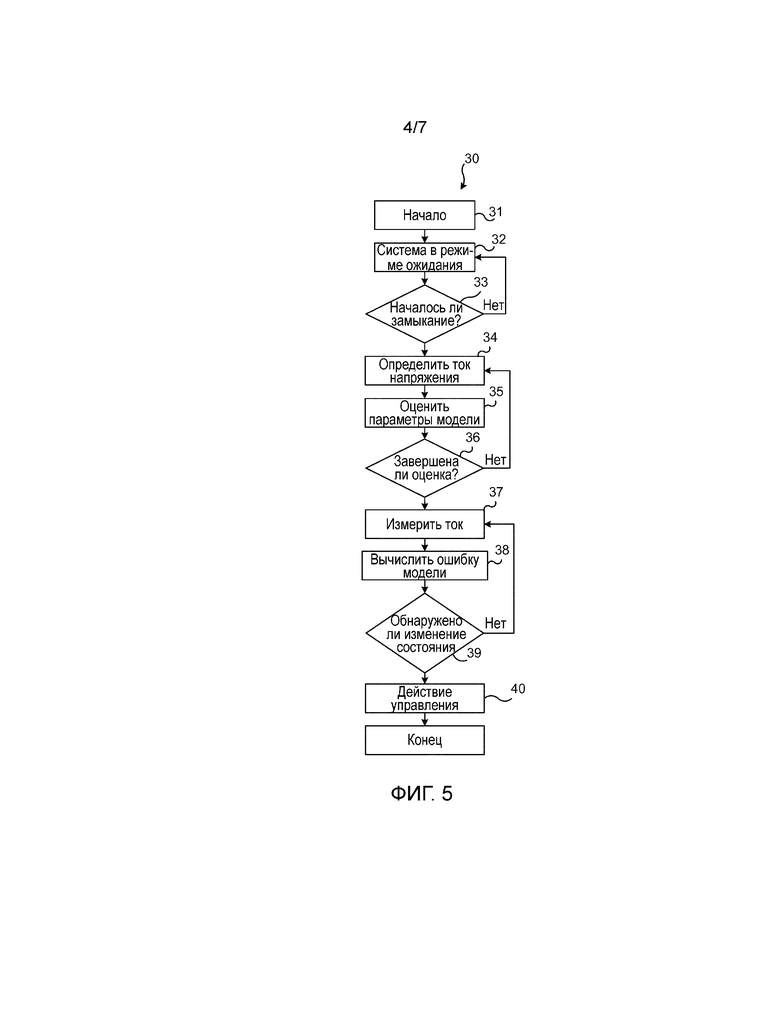
Фиг.5 иллюстрирует аспект настоящего изобретения в виде блок-схемы последовательности операций.
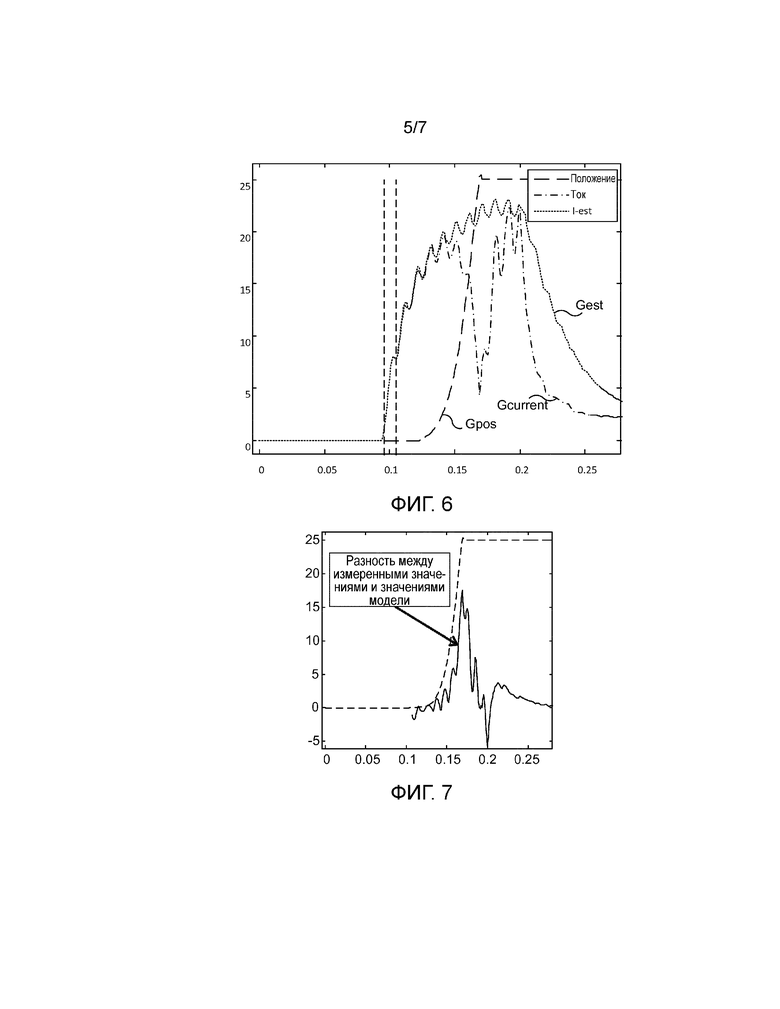
Фиг.6 иллюстрирует аспект настоящего изобретения в виде графиков зависимости параметризованной модели, измерений и положения контактора.
Фиг.7 иллюстрирует аспект настоящего изобретения, в частности разность между измерениями и моделью.
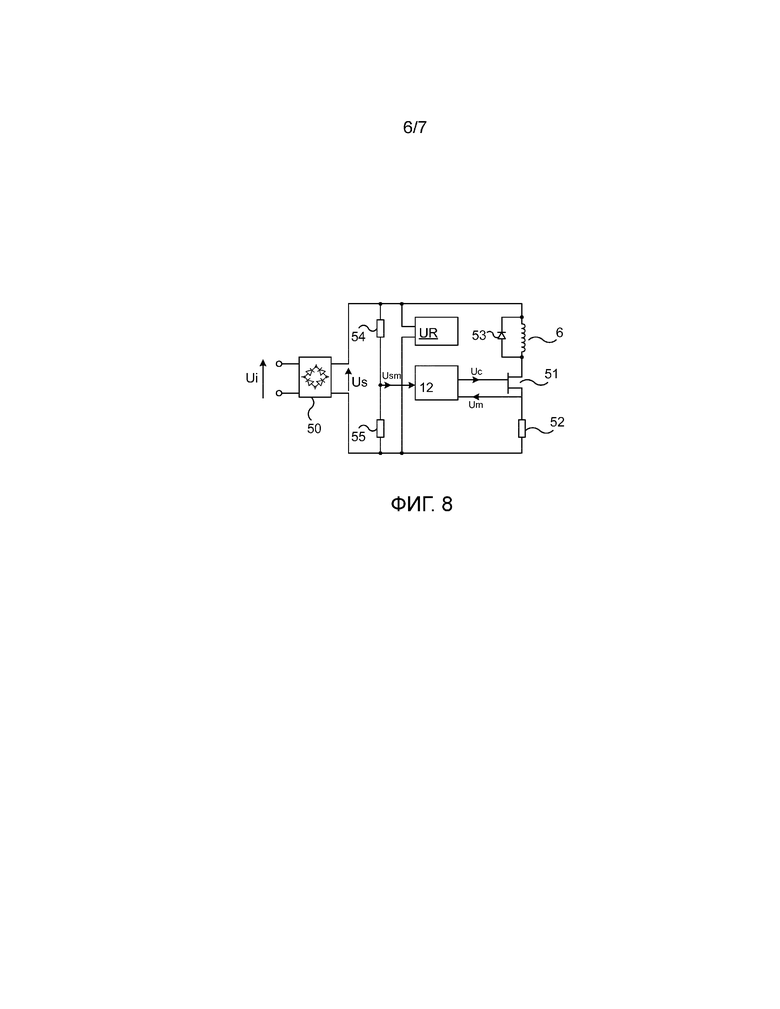
Фиг.8 иллюстрирует принципиальную схему контактора фиг.1.
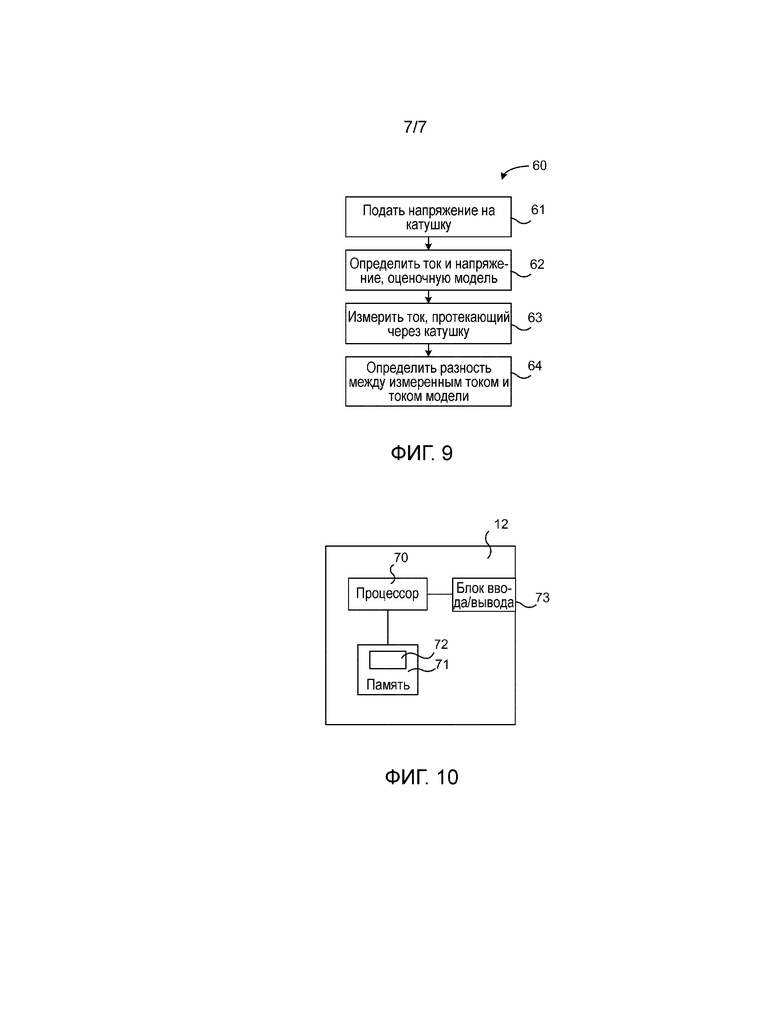
Фиг.9 иллюстрирует блок-схему последовательности операций по этапам способа управления контактором в соответствии с настоящим изобретением.
Фиг.10 иллюстрирует блок управления, выполненный с управления контактором в соответствии с настоящим изобретением.
Подробное описание изобретения
В последующем описании, для целей пояснения, а не ограничения, изложены конкретные детали, такие как конкретные архитектуры, интерфейсы, технологии и т.д. для того, чтобы обеспечить полное понимание. В других примерах подробное описание хорошо известных устройств, схем, компонентов и способов опущено, чтобы не загромождать описание излишней детализацией. Одинаковые ссылочные позиции относятся к одинаковым или аналогичным элементам на всем протяжении описания.
Фиг.1 иллюстрируют контактор 1 с электромагнитным приводом, к которому можно применить идеи настоящего изобретения. Контактор 1, представленный в качестве примера, содержит контактную часть 2, размещенную для установления или прерывания электрического пути 3, например, для управления электрическим путем в электрической цепи. Контактная часть 2 содержит подвижный контактный элемент 4a и первый и второй неподвижные контактные элементы 4b, 4c, которые в дальнейшем обозначаются как неподвижные контактные элементы 4b, 4c. Когда неподвижные контактные элементы 4b, 4c находятся в механическом контакте с подвижным контактным элементом 4a, образуется замкнутая электрическая цепь 3, в противном случае электрическая цепь прерывается.
Контактор 1 дополнительно содержит электромагнит 10. Электромагнит 10 содержит подвижную магнитную часть 5a, неподвижную магнитную часть 5b и катушку 6. В дальнейшем комбинация из подвижной магнитной части 5a и неподвижной магнитной части 5b также обозначена магнитами 5a, 5b. Магниты 5a, 5b являются подвижными относительно друг друга, и неподвижная магнитная часть 5b может, например, крепиться болтами к стене или т.п. Магниты 5a, 5b, которые могут иметь U-образную форму, размещаются, например, и как хорошо известно в данной области техники, таким образом, что две плечевые части подвижной U-образной магнитной части 5a имеют по существу одинаковое аксиальное продолжение, как и соответствующие две плечевые части неподвижной U-образной магнитной части 5b. Таким образом, плечевые части U-образных магнитов 5a, 5b имеют противоположные торцевые поверхности, между которыми образуется воздушный зазор 11. Следует отметить, что электромагнит 10 можно альтернативно выполнить любым другим традиционным способом. Таким образом, между подвижной магнитной частью 5a и неподвижной магнитной частью 5b имеется воздушный зазор 11, размер которого зависит от состояния контактора 1.
Катушка 6 может быть намотана на одну или более частей магнита 5a, 5b. Катушка 6 соединена с источником 9 напряжения, и при возбуждении катушки 6 в магнитах 5a, 5b создается магнитное поле.
Электромагнит 10 механически присоединен к держателю 8 контактов, который в дальнейшем обозначен как держатель 8. В частности, подвижная магнитная часть 5a электромагнита 10 механически соединена с держателем 8. Держатель 8 также механически соединен с подвижным контактным элементом 4a. Пружинный элемент 15 (который также обозначен как контактная пружина) можно затем разместить в держателе 8 для того, чтобы обеспечить смещение подвижного контактного элемента 4a, например, путем его размещения между держателем 8 и подвижным контактным элементом 4a.
Держатель 8 выполнен с возможностью отделения подвижного контактного элемента 4a контактной части 2 от неподвижных контактных элементов 4b, 4c контактной части 2, таким образом прерывая электрическую цепь 3. Держатель 8 также выполнен с возможностью замыкания контакта между подвижным контактным элементом 4a и неподвижными контактными элементами 4b, 4c, таким образом замыкая электрическую цепь 3 и обеспечивая протекание электрического тока. Держатель 8 выполнен с возможностью выполнения этого за счет его перемещения между двумя конечными положениями. Перемещение, в свою очередь, выполняется посредством электромагнита 10.
Когда катушка 6 не возбуждена, то есть когда через катушку 6 не протекает электрический ток, пружинные элементы 7a, 7b (которые также обозначены как пружинный толкатель механизма отделения) выполнены с возможностью нажатия на подвижную магнитную часть 5a в стороне от неподвижной магнитной части 5b, таким образом увеличивая воздушный зазор 11 и переводя контактор 1 в свое разомкнутое положение, то есть подвижный контактный элемент 4a взаимно не соединен с неподвижными контактными элементами 4b, 4c.
Когда электрическое напряжение подается на катушку 6, в катушке 6 протекает ток, и магниты 5a, 5b становятся намагниченными. Магнитное поле, выработанное таким образом, притягивает магниты 5a, 5b друг к другу. Когда в катушке 6 протекает достаточный ток, держатель 8 начинает перемещаться (по направлению вниз в установке, показанной на фиг.1). Ток, который требуется для перемещения держателя 8 (на фиг.1 перемещение его вниз), и таким образом подвижного контактного элемента 4a в замкнутое положение, гораздо выше, чем ток, необходимый для поддержания замкнутого состояния. Воздушный зазор 11, который является большим в разомкнутом положении, должен замыкаться, что требует силы упругости пружинных элементов 7a, 7b, которую необходимо преодолеть. Во время удержания воздушный зазор 11 является маленьким, и для поддержания замкнутого состояния достаточно низкого значения тока, протекающего через катушку. Кроме того, во время состояния удержания пружинный элемент 15, размещенный в держателе 8, поддерживает контакты 4a, 4b замкнутыми с помощью силы упругости.
Блок 12 управления предназначен для управления контактором 1 и, в частности, его размыканием и замыканием. Блок 12 управления содержит средство, например, схему, электронные схемы, схему обработки, память, источники напряжения и другие устройства, для возбуждения катушки 6 и управления перемещением держателя 8, а также для управления другими операциями контактора 1. Схемы или устройства датчиков для определения тока, протекающего через катушку, и напряжения на катушке иллюстрированы с помощью поз.13 и 14 и могут быть частью блока 12 управления или могут быть отдельно размещенными устройствами, которые обеспечивают блок 12 управления значениями измерений.
В настоящее время трудно обнаружить надежным образом момент времени, когда контактор 1 достигает своего замкнутого положения, и вместо этого часто применяется фиксированный момент времени с дополнительным резервным временем, в течение которого ток/напряжение является высоким. Это приводит, как объяснено в разделе "Предшествующий уровень техники", к пустой трате энергии. Фиг.2 иллюстрирует эту пустую трату энергии.
В частности, на фиг.2 показаны два графика: график C1 иллюстрирует ток (измеренный в амперах A), протекающий через катушку 6, в зависимости от времени, и график C2 иллюстрирует положение держателя 8 между разомкнутым и замкнутым конечными положениями в зависимости от времени. Стрелка, обозначенная поз.21, показывает начальную точку срабатывания контактора 1, и после подачи напряжения на катушку 6 ток, протекающий через катушку, увеличивается (график C1), и держатель 8 начинает перемещаться (стрелка 22, график C2). Во время замыкания контактора 1 ток, протекающий через катушку, изменяется пропорционально току намагничивания, в качестве которого часто используется выпрямленный переменный ток, но, когда перемещение держателя 8 завершено (стрелка 23), ток в обмотке достигает минимума, вызванного изменением индуктивности, в отличие от другого минимума, возникающего в результате колебаний напряжения.
Ток, протекающий через катушку, изменяется и, например, уменьшается тогда, когда держатель 8 начинает перемещение, так как изменение индуктивности катушки 6 вызывает противодействующее напряжение. Время, прошедшее с начала перемещения держателя 8 до завершения перемещения, изменяется. Поэтому ток, протекающий через катушку, в предшествующем уровне техники поддерживается на высоком уровне во время фазы удержания (стрелка 24, график C21). Как уже упоминалось, эта фаза удержания устанавливается на фиксированное время, включая дополнительный период времени, по соображениям безопасности. Стрелка 25, указывающая на зону развития колебаний, иллюстрирует энергию, потраченную впустую во время фазы удержания.
Следует отметить, что использование уменьшения тока может быть использовано для обнаружения замыкания. Однако это будет менее надежной альтернативой, чем решение согласно идеям настоящего изобретения, так как ток можно уменьшить по другим причинам также, например из-за колебания напряжения. Поэтому надежное обнаружение желательного минимума электрического тока будет затруднительным.
Вкратце, в аспекте настоящего изобретения энергия, которая требуется после установления контакта, поддерживается на минимальном уровне. Это достигается без ущерба для каких-либо аспектов безопасности. В частности, настоящее изобретение определяет, например, используя датчики, состояния держателя 8, основанные на электрическом токе в катушке 6 и электрическом напряжении на катушке 6, таким образом используя ток и напряжение в качестве измеренных свойств. В других аспектах настоящее изобретение обеспечивает адаптивное изменение состояний от управляемого напряжение срабатывания до управляемого тока удержания, тем самым значительно уменьшая требуемую энергию по сравнению с известными способами.
Фиг.3 иллюстрирует, как изменяется индуктивность катушки 6 в зависимости от изменений воздушного зазора 11, то есть как держатель 8 перемещается во время процедуры замыкания из своего разомкнутого положения в свое замкнутое положение. Как видно из графика, индуктивность катушки 6 уменьшается в зависимости от размера воздушного зазора 11. Изменение индуктивности приводит к изменению тока, протекающего в катушке, наличие которого можно использовать в соответствии с настоящим изобретением для определения положения держателя 8 и, в частности, определения того, когда держатель 8 достигнет или выйдет из "положения удержания".
Обращаясь теперь к фиг.4, изменение тока, протекающего через катушку, можно обнаружить и использовать для определения того, когда контактор 1 достигнет своего замкнутого положения. В частности, фиг.4 иллюстрирует графики в отношении тока, протекающего через катушку, и перемещение держателя во время процедуры замыкания в аспекте настоящего изобретения. Положение держателя 8 показано с помощью графика C4, и ток, протекающий через катушку, показан с помощью графика C3. Для сравнения график C1 изображен пунктирной линией и иллюстрирует первоначальный профиль тока (по сравнению с фиг.2). Процедура замыкания контактора 1 начинается в момент времени t0 (стрелка 30) и заканчивается в момент времени t1, когда заканчивается процедура замыкания, и, таким образом, контактор 1 замыкается (стрелка 31). При подаче напряжения, например, с использованием источника 9 напряжения ток протекает через катушку 6 электромагнита 10, и держатель 8 начинает перемещаться таким образом, чтобы замкнуть контактор 1, в частности, путем перемещения контактного элемента 4a, взаимно соединяющего неподвижные контактные элементы 4b, 4c, таким образом обеспечивая замкнутую электрическую цепь. Сравнение графиков C1 и C3 ясно иллюстрирует экономию энергии, которую можно обеспечить посредством настоящего изобретения. Требуемая энергия после установления контакта поддерживается на минимальном уровне, в частности, путем обнаружения фактического времени для установления контакта. Таким образом, можно отказаться от использования фиксированного времени с резервным временем согласно предшествующему уровню техники. Кроме того, за счет обнаружения фактического времени для установления контакта гарантируется, что установление надежного контакта действительно осуществляется перед переключением на ток в состоянии удержания.
Фиг.5 иллюстрирует в виде блок-схемы 20 последовательности операций аспект настоящего изобретения. Фиг.6 содержит графики, дополнительно иллюстрирующие некоторые этапы блок-схемы 30 последовательности операций. Обе фигуры упоминаются в дальнейшем.
Этап 31 показывает начало последовательности 30 операций. На этапе 32 система, то есть контактор 1, находится в режиме ожидания, что означает, что контактор 1 находится в разомкнутом (расцепленном) состоянии. На этапе 33 инициируется начало замыкания контактора 1, при этом такое начало может содержать, например, подачу напряжения на катушку 6. Начало замыкания может, например, повлечь за собой определение того, была ли инициирована последовательность замыкания, например, с помощью блока 12 управления, или определение того, была ли принята команда замыкания контактором 1 и т.д. Если определение является отрицательным, то система продолжает находиться в своем состоянии ожидания. Если началось замыкание, процесс продолжается на этапе 34. На этапе 34 определяется ток, протекающий через катушку 6, а также напряжение на катушке 6. Это определение можно выполнить различным образом, например с помощью простого измерения тока, протекающего через катушку 6, и напряжения на катушке 6. Напряжение можно определить альтернативными способами, а также, например, основываясь на уже имеющейся информации относительно напряжения или путем измерения напряжения, которое пропорционально напряжению, подаваемому на катушку 6.
Далее на этапе 35 оцениваются параметры модели, в частности, содержащие параметры, такие как измеренные параметры тока и напряжения на катушке 6. Эти измерения и оценки продолжаются в течение периода времени, например, до тех пор, пока не будет достигнуто ограничение по времени или до тех пор, пока оценочные параметры не совпадут с требуемыми значениями. Таким образом, принимается решение (этап 36) относительно того, следует ли продолжать оценку параметров модели.
В этом аспекте настоящего изобретения параметры используются для предсказания поведения контактора 1 в зависимости от входного сигнала (напряжения) и состояния модели (тока). Модель параметризуется тогда, когда контактор 1 находится в своем разомкнутом состоянии, следовательно, модель будет предсказывать ток, протекающий через катушку 6, как если бы контактор 1 оставался в разомкнутом состоянии в зависимости от времени (смотри, график, обозначенный Gest на фиг.6).
[0031] Таким образом, график Gest, показанный на фиг.6, иллюстрирует предсказанное поведение тока, протекающего через катушку 6, если бы контактор 1 оставался в своем разомкнутом состоянии. График Gcurrent, показанный на фиг.6, иллюстрирует измерения, сделанные после приема команды замыкания. Ток, протекающий через катушку, падает до минимального уровня при замыкании контактора 1, но фактическое время этого трудно определить, как было описано ранее, например, из-за колебаний тока, возникающих из-за других факторов, чем падение тока, вызванное в момент замыкания. Настоящее изобретение позволяет решить эту проблему путем сравнения оценочного поведения тока с измеренным током. Когда разность между этими токами является достаточно большой, определяется время замыкания, которое имеет место. Как иллюстрировано на фиг.6, положение держателя 8 (график Gpos) соответствует замкнутому состоянию контактора, когда измеренный ток достигает минимального значения (в частности, абсолютный минимум процесса замыкания). Фиг.7 иллюстрирует разность между измеренными значениями и значениями модели.
Если решение, принятое на этапе 36, является отрицательным, то продолжаются определения (этап 34) и оценки (этап 35). Если на этапе 26 принимается положительное решение, то процесс продолжается на этапе 37.
На этапе 37 измеряется ток, протекающий через катушку 6. Определенное напряжение на катушке 6 можно использовать, как отмечалось ранее, в качестве входного сигнала для модели. Таким образом, такое определенное напряжение можно использовать для предсказания тока, протекающего через катушку 6 (на фиг.6 график, обозначенный Gest).
На этапе 38 предсказанный ток (график Gest на фиг.6) сравнивается с измеренным током (на фиг.6 график, обозначенный Gcurrent), и результат этого сравнения используется на этапе 39 для принятия решения относительно того, изменилось или нет состояние контактора 1. Если на этапе 39 определяется, что состояние контактора 1 не изменилось, то процесс возвращается на этап 37. Если на этапе 39 определяется, что состояние контактора 1 изменилось, то процесс продолжается на этапе 60.
Наконец, на этапе 30 заканчивается процесс 30, или может быть предпринято действие управления. Например, действие управления, которое относится к состоянию удержания, такому как уменьшение тока, протекающего через катушку 6, для выполнения удержания. Ток может уменьшиться до уровня, подходящего для удержания при минимизации потерь мощности.
Фиг.8 иллюстрирует принципиальную электрическую схему, представляющую реализацию контактора 1, показанного на фиг.1. Напряжение Ui подается из источника 9 напряжения (смотри фиг.1). Замыкание контактора 1 выполняется в результате подсоединения источника 9 напряжения, в то время как размыкание выполняется при разъединении источника 9 напряжения. Напряжение питания может подаваться через двухполупериодный выпрямитель 50, выходное напряжение Us которого является постоянным напряжением, если подаваемое напряжение является постоянным напряжением, и двухполупериодным выпрямленным переменным напряжением, если подаваемое напряжение является переменным напряжением. Выходное напряжение Us подается на катушку 6 контактора 1. Катушка 6 последовательно соединена с переключающим транзистором 51 и низкоомным последовательным резистором 52, который в дальнейшем обозначается как измерительный резистор 52, предназначенный для измерения тока. Катушка 6 соединена антипараллельно с шунтирующим диодом 53.
Блок 12 управления выполнен с возможностью управления, c помощью транзистора 51, напряжением на катушке 6 с помощью широтно-импульсной модуляции. Блок 12 управления выводит сигнал Uc управления на затвор транзистора 51 и управляет транзистором 51 с постоянной частотой повторения импульсов и с переменной длительностью импульсов. Блок 12 управления питается напряжением Um, появляющимся на концах измерительного резистора 52, напряжение на котором является мерой тока, протекающего через катушку 6. Делитель напряжения, сформированный резисторами 54, 55, подключенными параллельно блоку 12 управления, делит измеренный сигнал Usm в блоке 12 управления, измеренный сигнал Usm которого пропорционален напряжению Us.
Фиг.9 иллюстрирует блок-схему последовательности операций, соответствующей этапам способа управления, в частности, замыкания, контактора, в соответствии с настоящим изобретением. Способ 60 можно реализовать в виде и выполнить с помощью блока 12 управления, который сконфигурирован или выполнен с возможностью управления контактором 1, как описано ранее, в частности управления его замыканием. Таким образом, контактор 1 имеет возможность перемещения между замкнутым положением, в котором ток может протекать в токовой цепи, и разомкнутым положением, в котором прерывается токовая цепь. Блок 12 управления выполнен с возможностью обеспечения перемещения между замкнутым положением и разомкнутым положением за счет возбуждения катушки 6 электромагнитной схемы. Способ 60 содержит подачу 61 напряжения на катушку 6 контактора 1.
Способ 60 содержит определение 62, в течение первого периода времени, тока, протекающего через катушку 6, и напряжения на катушке 6 и оценку, основанную на этих параметрах модели для модели, которая предсказывает поведение тока, протекающего через катушку 6, если бы контактор 1 оставался в разомкнутом положении. Определение тока, протекающего через катушку 6, можно выполнить просто путем измерения тока. Определение напряжения на катушке 6 можно выполнить различными способами, как объяснено ранее, например с помощью простого его измерения. Определение напряжения на катушке 6 можно альтернативно выполнить на основании уже имеющейся информации относительно напряжения путем измерения напряжения, которое пропорционально напряжению, которое подается на катушку 6. Для примерных способов определения напряжения на катушке 6 смотри также фиг.8 и соответствующее описание.
Способ 60 содержит измерение 63, после окончания первого периода времени, тока, протекающего через катушку 6, и определение 64 разности между, с одной стороны, измеренным током и, с другой стороны, предсказанным током модели. Измерение 63 и определение 63 повторяется до тех пор, пока не будет обнаружено изменение состояния из разомкнутого положения в замкнутое положение с помощью разности токов.
В варианте осуществления способ 60 содержит, после окончания первого периода времени, определение напряжения на катушке 6 и использование этого напряжения для определения предсказанного тока модели. То есть, при выполнении сравнений измеренного тока, протекающего через катушку 6, и предсказанного тока модели, при этом последний может базироваться на таком определении напряжения. Определение напряжения можно выполнить, как описано выше, различными способами, одним из которых является простое его измерение.
В варианте осуществления первый период времени содержит предварительно определенный период времени или время, прошедшее с момента инициирования начала замыкания контактора 1 до совпадения оценочных параметров с требуемыми значениями. Первый период времени может содержать время, прошедшее с момента подачи 61 напряжения до совпадения оценочных параметров, в частности, с требуемыми значениями.
В варианте осуществления способ 60 содержит переключение, в определенный момент времени замыкания, с первого напряжения на второе напряжение. Например, первое напряжение может содержать напряжение срабатывания, обеспечивающее подачу тока в катушку 6 для инициирования перемещения между замкнутым положением и разомкнутым положением. Например, второе напряжение может содержать напряжение удержания, обеспечивающее подачу тока в катушку 6 для удержания контактора 1 в замкнутом положении.
В варианте осуществления обнаружения изменения состояния из разомкнутого положения в замкнутое положение базируется на разности токов, которая выше порогового значения, как упомянуто выше. Например, пороговое значение можно установить на большее значение, чем любые колебания токов в измеренном токе, вызванные использованием выпрямленного переменного тока для возбуждения катушки 6, обеспечивая разность, соответствующую замкнутому положению контактора 1.
Следует отметить, что обнаружение изменения состояния на замкнутое положение на основании разности токов, то есть для установления того, что контактор 1 находится в замкнутом положении, можно выполнить альтернативными способами, например путем интегрирования разности токов по времени и обнаружения изменения состояния на замкнутое положение, когда результат этого интегрирования является достаточно высоким.
В варианте осуществления перемещение между замкнутым положением и разомкнутым положением за счет возбуждения катушки 6 электромагнитной схемы содержит возбуждение катушки 6, намотанной на часть магнита 5a, 5b электромагнита 10, для того, чтобы перемещать держатель 8, который механически соединен с магнитом 5a, 5b и содержит подвижный контактный элемент 4a между замкнутым положением, в котором подвижный контактный элемент 4a соединяет между собой неподвижные контактные элементы 4b, 4c, и разомкнутым положением, в котором подвижный контактный элемент 4a размыкает электрическую цепь между неподвижными контактными элементами 4b, 4c.
Фиг.10 схематично иллюстрирует блок 12 управления и средство для реализации способов настоящего изобретения. Блок 12 управления может содержать процессор 70, содержащий любую комбинацию одного или более из: центрального процессорного устройства (CPU), мультипроцессора, микроконтроллера, процессора цифровых сигналов (DSP), специализированной интегральной микросхемы и т.д., которые позволяют исполнять инструкции программного обеспечения, которые хранятся в памяти 71, которая может представлять таким образом компьютерный программный продукт 71. Процессор 70 можно сконфигурировать с возможностью исполнения любого из различных вариантов осуществления способа, как описано в связи с фиг.9.
Ссылаясь по-прежнему на фиг.10, память 71 может представлять собой любую комбинацию из оперативного запоминающего устройства (RAM) и постоянного запоминающего устройства (ROM). Память 71 может также содержать устройство постоянного хранения данных, которое, например, может представлять собой любое одно или комбинацию из магнитной памяти, оптической памяти, твердотельной памяти или даже удаленной установленной памяти.
Блок 12 управления может дополнительно содержать устройство 73 ввода/вывода (I/O) для приема данных из внешних устройств. Например, устройство 73 ввода/вывода можно использовать для приема измеренных значений от датчиков 13, 14.
Блок 12 управления выполнен с возможностью управления контактором 1, как описано выше. Блок 12 управления выполнен с возможностью замыкания контактора 1, причем контактор 1 имеет возможность перемещения между замкнутым положением, в котором ток может протекать в токовой цепи, и разомкнутым положением, в котором прерывается токовая цепь. Блок 12 управления выполнен с возможностью осуществления перемещения между замкнутым положением и разомкнутым положением за счет возбуждения катушки 6 электромагнитной схемы, как было описано выше. Блок 12 управления сконфигурирован с возможностью выполнения различных вариантов осуществления способа 60, как описано в связи с фиг.9.
В частности, блок 12 управления выполнен с возможностью подачи напряжения на катушку 6; определения, во время первого периода времени, тока, протекающего через катушку 6, и напряжения на катушке 6, и оценки на этом основании параметров модели для модели, предсказывающей поведение тока, протекающего через катушку 6, как если бы контактор 1 оставался в разомкнутом положении; и измерения, после окончания первого периода времени, тока, протекающего через катушку 6, и определения 64 разности между, с одной стороны, измеренным током и, с другой стороны, предсказанным током модели, и повторения измерения 63 и определения 64 до тех пор, пока не будет обнаружено изменение состояния с разомкнутого положения на замкнутое положение с помощью разности токов.
В варианте осуществления блок 12 управления выполнен с возможностью, после окончания первого периода времени, определения напряжения на катушке 6 и использования напряжения для определения предсказанного тока модели.
В варианте осуществления первый период времени содержит предварительно определенный период времени или время, прошедшее с момента подачи напряжения на катушку 6 до совпадения оценочных параметров с заданными параметрами.
В варианте осуществления блок 12 управления выполнен с возможностью переключения, в определенный момент времени замыкания, с первого напряжения на второе напряжение.
В разновидности приведенного выше варианта осуществления первое напряжение содержит напряжение срабатывания, обеспечивающее ток в катушке 6 для инициирования перемещения между замкнутым положением и разомкнутым положением.
В другой разновидности приведенных выше двух вариантов осуществления второе напряжение содержит напряжение удержания, обеспечивающее подачу тока в катушку 6 для удержания контактора 1 в замкнутом положении.
В варианте осуществления блок 12 управления выполнен с возможностью обнаружения на основании разности токов, которая выше порогового значения.
В разновидности приведенного выше варианта осуществления блок 12 управления выполнен с возможностью набора порогового значения выше, чем колебания тока в измеренном токе, вызванном использованием выпрямленного переменного тока для возбуждения катушки 6, что гарантирует разность, соответствующую замкнутому положению контактора 1.
В варианте осуществления блок 12 управления выполнен с возможностью обеспечения осуществления перемещения между замкнутым положением и разомкнутым положением за счет возбуждения катушки 6 электромагнитной схемы за счет возбуждения катушки 6, намотанной на часть магнита 5a, 5b электромагнита 10 для того, чтобы перемещать держатель 8, который механически соединен с магнитом 5a, 5b и содержит подвижный контактный элемент 4a, между замкнутым положением, в котором подвижный контактный элемент 4a соединяет между собой неподвижные контактные элементы 4b, 4c, и разомкнутым положением, в котором подвижный контактный элемент 4a размыкает электрическую цепь между неподвижными контактными элементами 4b, 4c.
Идеи настоящего изобретения также охватывают компьютерный программный продукт 71, содержащий компьютерные программы 72 для реализации способов, как описано выше, и средство, считываемое компьютером, на котором хранится компьютерная программа 72. Компьютерный программный продукт 71 может представлять собой любую комбинацию из оперативного запоминающего устройства (RAM) или постоянного запоминающего устройства (ROM). Компьютерный программный продукт 71 может также содержать устройство постоянного хранения данных, которое, например, может представлять собой одну или комбинацию из магнитной памяти, оптической памяти или твердотельной памяти.
Таким образом, настоящее изобретение содержит компьютерную программу 72 для блока 12 управления, как описано выше. Компьютерная программа 72, содержащая код компьютерной программы, который при ее запуске в блоке 12 управления предписывает блоку 12 управления:
подавать напряжение на катушку 6,
определять в течение первого периода времени ток, протекающий через катушку 6, и напряжение на катушке 6 и оценивать на этом основании параметры для модели, предсказывающей поведение тока, протекающего через катушку 6, как если бы контактор 1 оставался в разомкнутом положении, и
измерить, после окончания первого периода времени, ток, протекающий через катушку 6, и определить 64 разность между, с одной стороны, измеренным током и, с другой стороны, предсказанным током модели, и повторять измерение 63 и определение 64 до тех пор, пока не будет обнаружено изменение состояния с разомкнутого положения на замкнутое положение с помощью разности токов.
Использование – в области электротехники. Технический результат – снижение потерь и повышение надежности контактора. Настоящее изобретение относится к способу 60 в блоке 12 управления для замыкания контактора 1. Блок 12 управления выполнен с возможностью обеспечения перемещения между замкнутым положением и разомкнутым положением за счет возбуждения катушки 6 электромагнитной схемы. Способ 60 содержит подачу 61 напряжения на катушку 6; определение 62, в течение первого периода времени, тока, протекающего через катушку 6, и напряжения на катушке 6 и оценку на этом основании параметров модели для модели, предсказывающей поведение тока, протекающего через катушку 6, как если бы контактор 1 оставался в разомкнутом положении, и измерение 63, после окончания первого периода времени, тока, протекающего через катушку 6, и определение 64 разности между, с одной стороны, измеренным током и, с другой стороны, предсказанным током модели, и повторение измерения 63 и определения 64 до тех пор, пока не будет обнаружено изменение состояния с разомкнутого положения на замкнутое положение с помощью разности токов. 2 н. и 16 з.п. ф-лы, 10 ил.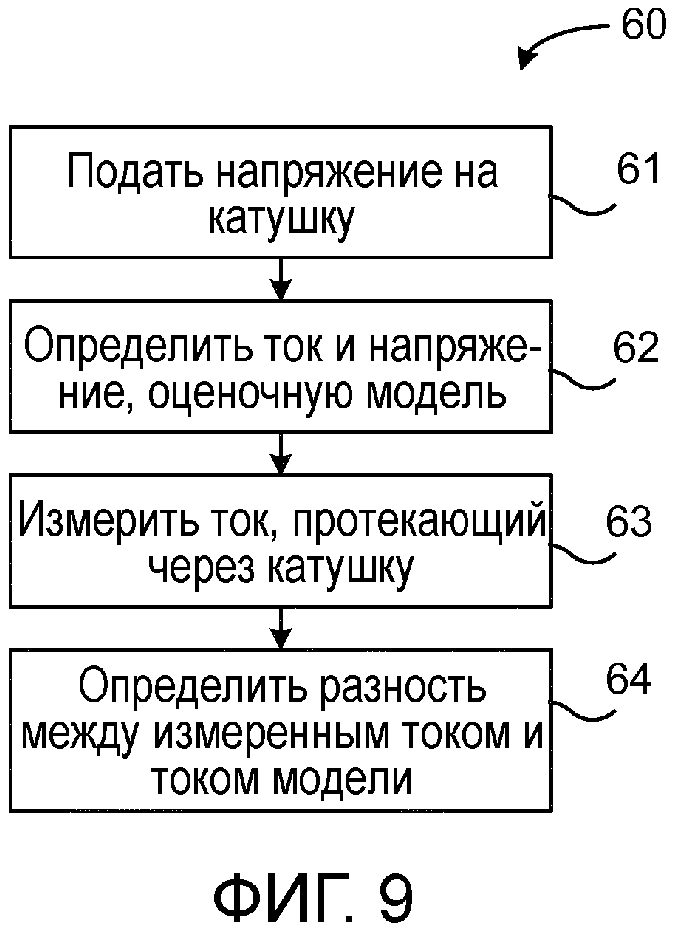
1. Способ (60), выполняемый в блоке (12) управления для замыкания контактора (1), причем контактор (1) имеет возможность перемещения между замкнутым положением, в котором ток может протекать в токовой цепи, и разомкнутым положением, в котором разрывается токовая цепь, при этом блок (12) управления выполнен с возможностью обеспечения перемещения между замкнутым положением и разомкнутым положением за счет возбуждения катушки (6) электромагнитной схемы, причем способ (60) содержит:
- подачу (61) напряжения на катушку (6),
- определение (62), в течение первого периода времени, тока, протекающего через катушку (6), и напряжения на катушке (6) и оценку на этом основании параметров модели для модели, предсказывающей поведение тока, протекающего через катушку (6), как если бы контактор (1) оставался в разомкнутом положении, и
- измерение (63), после окончания первого периода времени, тока, протекающего через катушку (6), и определение (64) разности между, с одной стороны, измеренным током и, с другой стороны, предсказанным током модели, и повторение измерения (63) и определение (64) до тех пор, пока не будет обнаружено изменение состояния с разомкнутого положения на замкнутое положение с помощью разности токов.
2. Способ (60) по п.1, содержащий, после окончания первого периода времени, определение напряжения на катушке (6) и использование напряжения для определения предсказанного тока модели.
3. Способ (60) по п.1 или 2, в котором первый период времени содержит предварительно определенный период времени или время, прошедшее с момента подачи напряжения на катушку (6) до совпадения оценочных параметров с требуемыми значениями.
4. Способ (60) по п.1, содержащий переключение, в определенный момент времени замыкания, с первого напряжения на второе напряжение.
5. Способ (60) по п.4, в котором первое напряжение содержит напряжение срабатывания, обеспечивающее подачу тока в катушку (6) для инициирования перемещения между замкнутым положением и разомкнутым положением.
6. Способ (60) по п.4 или 5, в котором второе напряжение содержит напряжение удержания, обеспечивающее подачу тока в катушку (6) для удержания контактора (1) в замкнутом положении.
7. Способ (60) по п.1, в котором обнаружение основано на разности токов, которая выше порогового значения.
8. Способ (60) по п.7, содержащий установку порогового значения выше, чем любые колебания тока в измеренном токе, вызванные использованием выпрямленного переменного тока для возбуждения катушки (6), что гарантирует разность, соответствующую замкнутому положению контактора (1).
9. Способ (60) по п.1, в котором перемещение между замкнутым положением и разомкнутым положением за счет возбуждения катушки (6) электромагнитной схемы содержит возбуждение катушки (6), намотанной на часть магнита (5a, 5b) электромагнита (10) для того, чтобы перемещать держатель (8), который механически соединен с магнитом (5a, 5b), и содержит подвижный контактный элемент (4a), между замкнутым положением, в котором подвижный контактный элемент (4a) соединяет между собой неподвижные контактные элементы (4b, 4c), и разомкнутым положением, в котором подвижный контактный элемент (4a) размыкает электрическую цепь между неподвижными контактными элементами (4b, 4c).
10. Блок (12) управления для замыкания контактора (1), причем контактор (1) выполнен с возможностью перемещения между замкнутым положением, в котором ток может протекать в токовой цепи, и разомкнутым положением, в котором разрывается токовая цепь, при этом блок (12) управления выполнен с возможностью обеспечения перемещения между замкнутым положением и разомкнутым положением за счет возбуждения катушки (6) электромагнитной схемы, при этом блок (12) управления выполнен с возможностью:
- подачи напряжения на катушку (6),
- определения, в течение первого периода времени, тока, протекающего через катушку (6), и напряжения на катушке (6) и оценки на этом основании параметров модели для модели, предсказывающей поведение тока, протекающего через катушку (6), как если бы контактор (1) оставался в разомкнутом положении, и
- измерения, после окончания первого периода времени, тока, протекающего через катушку (6), и определения (64) разности между, с одной стороны, измеренным током и, с другой стороны, предсказанным током модели и повторения измерения (63) и определения (64) до тех пор, пока не будет обнаружено изменение состояния с разомкнутого положения на замкнутое положение с помощью разности токов.
11. Блок (12) управления по п.10, выполненный с возможностью, после окончания первого периода времени, определения напряжения на катушке (6) и использования напряжения для определения предсказанного тока модели.
12. Блок (12) управления по п.10 или 11, в котором первый период времени содержит предварительно определенный период времени или время, прошедшее с момента подачи напряжения на катушку (6) до совпадения оценочных параметров с требуемыми значениями.
13. Блок (12) управления по п.10, выполненный с возможностью переключения, в определенное время замыкания, с первого напряжения на второе напряжение.
14. Блок (12) управления по п.13, в котором первое напряжение содержит напряжение срабатывания, обеспечивающее подачу тока в катушку (6) для инициирования перемещения между замкнутым положением и разомкнутым положением.
15. Блок (12) управления по п.13 или 14, в котором второе напряжение содержит напряжение удержания, обеспечивающее подачу тока в катушку (6) для удержания контактора (1) в замкнутом положении.
16. Блок (12) управления по п.10, выполненный с возможностью обнаружения на основании разности токов, которая выше порогового значения.
17. Блок (12) управления по п.16, содержащий установку порогового значения выше, чем любые колебания тока в измеренном токе, вызванные использованием выпрямленного переменного тока для возбуждения катушки (6), гарантируя разность, соответствующую замкнутому положению контактора (1).
18. Блок (12) управления по п.10, выполненный с возможностью обеспечения перемещения между замкнутым положением и разомкнутым положением за счет возбуждения катушки (6) электромагнитной схемы, за счет возбуждения катушки (6), намотанной на часть магнита (5a, 5b) электромагнита (10) для того, чтобы перемещать держатель (8), который механически соединен с магнитом (5a, 5b), и содержит подвижный контактный элемент (4a), между замкнутым положением, в котором подвижный контактный элемент (4a) соединяет между собой неподвижные контактные элементы (4b, 4c), и разомкнутым положением, в котором подвижный контактный элемент (4a) размыкает электрическую цепь между неподвижными контактными элементами (4b, 4c).
| БАРОКОМПЕНСИРОВАННЫЙ ЭЛЕКТРОХИМИЧЕСКИЙ ИЗМЕРИТЕЛЬНЫЙ ГАЗОАНАЛИЗАТОР (ВАРИАНТЫ) | 2014 |
|
RU2551881C1 |
| Устройство для затяжки клапана ранцев для парашютов | 1949 |
|
SU78604A1 |
| СПОСОБ ВЫМОРАЖИВАНИЯ СОЛЯНЫХ РАСТВОРОВ | 1922 |
|
SU3999A1 |
| WO 2011095223 A1, 11.08.2011. | |||

