Изобретение относится к области переработки углеводородного сырья, к области получения углеводородного топлива, к области нефтехимии и нефтепереработки, к химическому машиностроению, к области экологии и может быть использовано в производстве для получения синтез-газа, синтетической нефти, топлива для двигателей внутреннего сгорания, а также для уничтожения токсичных соединений.
Известен химический реактор сжатия (см. описание к патенту РФ №2129462 на изобретение, МПК: 6 B01J 7/00, С01В 3/36, С01В 3/32, С01В 3/34), содержащий кривошипно-шатунный механизм, связанную с кривошипно-шатунным механизмом пару камера-тело -реакционную камеру и выполненное в ней тело для сжатия смеси реагентов при его перемещении между зонами верхней и нижней мертвых точек, отграничивающее при нахождении его в зоне нижней мертвой точки рабочий объем в камере, канал ввода реагентов в рабочий объем и канал вывода продукта переработки из рабочего объема, средства подготовки смеси реагентов, которые связаны с каналом ввода. Пара камера-тело выполнена в виде цилиндропоршневой группы - цилиндр-поршень, кривошипно-шатунный механизм реализован с толкающим поршень шатуном, связанным с поршнем. Каналы ввода и вывода выполнены системой привода клапанов. Каждый цилиндр снабжен средствами подготовки смеси реагентов - форкамерой с системой подачи воздуха, обеспечивающей создание в ней смеси с составом, обуславливающим надежное принудительное воспламенение. Привод клапанов цилиндров выполнен с возможностью обеспечения отпирания впускного клапана (канал ввода) только после запирания выпускного клапана (канал вывода). В устройстве использован механический, электромагнитный или гидромеханический привод клапанов.
Впускной клапан (канал ввода) и выпускной клапан (канал вывода) расположены в одной и той же зоне камеры - вблизи зоны верхней мертвой точки. Каналы ввода и вывода выполнены с возможностью достижения перемещающимся телом зоны верхней мертвой точки и неполного вывода продукта переработки из камеры.
Устройство работает по четырехтактному циклу при принудительном воспламенении и предназначено в основном для получения синтез-газа из богатых смесей углеводородных газов с воздухом - из метановоздушной смеси.
В качестве ближайшего аналога выбран химический реактор сжатия (см. описание к патенту РФ №2096313 на изобретение, МПК: 6 С01В 3/36), содержащий кривошипно-шатунный механизм, связанную с кривошипно-шатунным механизмом пару камера-тело - реакционную камеру и выполненное в ней тело для сжатия смеси реагентов при его перемещении между зонами верхней и нижней мертвых точек, отграничивающее при нахождении его в зоне нижней мертвой точки рабочий объем в камере, канал ввода (впускной клапан) реагентов в рабочий объем и канал вывода (выпускной клапан) продукта переработки из рабочего объема, средства подготовки смеси с веществом, которые связаны с каналом ввода.
Устройство сконструировано на основе двигателя внутреннего сгорания компрессионного типа, цилиндр которого представляет собой реакционную камеру с замкнутым объемом, в котором размещен поршень, связанный с кривошипно-шатунным механизмом, обеспечивающий в отношении поршня - перемещающегося тела приложение толкающего усилия от шатуна. Впускной и выпускной клапаны размещены в зоне верхней мертвой точки цилиндра, при этом впускной клапан связан со смесителем реагентов - окислителя и углеводородного сырья и их подогревателем, а выпускной клапан связан с приемником продуктов окисления. Поршень цилиндра через кривошипно-шатунный механизм связан с приводом. С валом кривошипа соединен электродвигатель или привод другого вида.
Описанное устройство разработано для получения преимущественно синтез-газа. Работает циклично с частотой движения поршня в цилиндре не менее 350 мин-1. Минимальное количественное значение частоты цикла определяется тем, что при относительно меньшей скорости сжатия не обеспечивается самовоспламенения рабочей смеси.
Приведенными реакторами невозможно обеспечить: достижение непрерывности протекания реакции переработки с получением требуемого продукта при сжатии после ее запуска; достижение пролонгирования времени наработки требуемого продукта при сжатии; повышение отношения количества полученного конечного продукта к количеству исходного перерабатываемого вещества; расширение интервала температур предварительного подогрева смеси реагентов, снижение его нижнего значения и/или повышение верхнего значения; снижение энергозатрат на переработку вещества; расширение ассортимента перерабатываемых веществ; повышение чистоты продукта переработки; снижение содержания побочных продуктов; сокращение времени получения готового продукта; повышение экологичности процесса переработки; расширение интервала давлений в реакционной камере при переработке; достижение возможности регулирования положения зоны верхней мертвой точки в реакционной камере.
Препятствующие причины заключаются в следующем. Во-первых, переработка осуществляется с опосредованным управлением давлением в рабочем объеме реакционной камеры на протяжении цикла сжатие-расширение. Изменение давления, управление им, происходит через изменение рабочего объема, с изменением объема в фиксированном интервале величин, со строго заданными параметрами движения, так как реализует изменение объема перемещающееся тело, совершающее возвратно-поступательное движение в строго заданных пространственных пределах камеры и с фиксированной частотой. Управление давлением для протекания реакции переработки не оптимизировано. Во-вторых, сжатие смеси при переработке осуществляется перемещающимся телом за счет толкающего усилия шатуна кривошипно-шатунного механизма, с которым связано тело.
Техническим результатом является:
- достижение непрерывности протекания реакции переработки с получением требуемого продукта при сжатии после ее запуска;
- достижение пролонгирования времени наработки требуемого продукта при сжатии;
- повышение отношения количества полученного конечного продукта к количеству исходного перерабатываемого вещества;
- расширение интервала температур предварительного подогрева смеси реагентов, снижение его нижнего значения и/или повышение верхнего значения;
- снижение энергозатрат на переработку вещества;
- расширение ассортимента перерабатываемых веществ;
- повышение чистоты продукта переработки;
- снижение содержания побочных продуктов;
- сокращение времени получения готового продукта;
- повышение экологичности процесса переработки;
- расширение интервала давлений в реакционной камере при переработке;
- достижение возможности регулирования положения зоны верхней мертвой точки в реакционной камере.
Технический результат достигается в химическом реакторе сжатия, содержащем кривошипно-шатунный механизм, связанную с кривошипно-шатунным механизмом пару камера-тело - реакционную камеру и расположенное в ней тело для сжатия смеси реагентов при его перемещении между зонами верхней и нижней мертвых точек, отграничивающее при нахождении его в зоне нижней мертвой точки рабочий объем в камере, канал ввода реагентов в рабочий объем и канал вывода продукта переработки из рабочего объема, причем кривошипно-шатунный механизм выполнен с шатунами растяжения, которыми связан с парой камера-тело, с возможностью возвратно-поступательного перемещения к зонам верхней мертвой точки и зонам нижней мертвой точки тела в камере, в паре камера-тело выполнены датчики давления в рабочем объеме и датчики вывода продукта переработки из рабочего объема, канал ввода пары камера-тело выполнен с возможностью сообщения с рабочим объемом при нахождении тела в зоне нижней мертвой точки, канал вывода пары камера-тело выполнен с возможностью сообщения с частью рабочего объема, равной величине рабочего объема за вычетом объема, расположенного между зонами верхней и нижней мертвых точек, в каналах ввода и вывода установлены управляемые клапаны, соответственно, ввода и вывода, пара камера-тело снабжена камерой закалки, выполненной с возможностью сообщения с рабочим объемом через управляемый клапан канала вывода, для управления работой реактора выполнен программно-аппаратный комплекс, с которым связаны управляемые клапаны, датчик давления, датчик вывода продукта переработки, кривошипно-шатунный механизм с шатунами растяжения.
В реакторе выполнена дополнительная такая же пара камера-тело, обе пары камера-тело установлены на одной и той же прямой с симметричным расположением плоскостей, проходящих через зоны верхних мертвых точек, и плоскостей, проходящих через зоны нижних мертвых точек, относительно плоскости, перпендикулярной прямой, на которой установлены пары камера-тело, кривошипно-шатунный механизм шатунами растяжения связан с каждой парой камера-тело с формированием одинаковой кинематической цепи, с возможностью синхронного возвратно-поступательного перемещения к зонам верхней мертвой точки и зонам нижней мертвой точки каждого тела в каждой камере, в обеих парах камера-тело выполнены датчики давления в рабочих объемах и датчики вывода продукта переработки из рабочих объемов с расположением их между зонами верхних мертвых точек пар камера-тело, каналы ввода пар камера-тело, каждый из которых выполнен с возможностью сообщения с рабочим объемом при нахождении каждого тела в зоне нижней мертвой точки, расположены между зонами нижних мертвых точек пар камера-тело, каналы вывода пар камера-тело, каждый из которых выполнен с возможностью сообщения с частью рабочего объема, равной величине рабочего объема за вычетом объема, расположенного между зонами верхней и нижней мертвых точек, расположены между зонами верхних мертвых точек пар камера-тело, в обоих каналах ввода и обоих каналах вывода установлены управляемые клапаны, соответственно, ввода и вывода, каждая пара камера-тело снабжена камерой закалки, выполненной с возможностью сообщения с рабочим объемом через управляемый клапан канала вывода, каждая камера закалки выполнена симметричной относительно плоскости, перпендикулярной плоскостям, проходящим через зоны верхних мертвых точек и зоны нижних мертвых точек, и проходящей через прямую, на которой установлены пары камера-тело, программно-аппаратный комплекс связан с управляемыми клапанами, датчиками давления, датчиками вывода продукта переработки обеих пар камера-тело.
В реакторе в паре камера-тело поверхности камеры и тела, перемещаемые друг относительно друга, снабжены покрытием, полученным микродуговым или термоэлектрохимическим оксидированием, тело относительно камеры расположено с зазором, обеспечивающим отсутствие влияния перепускания смеси реагентов на процесс переработки.
Реактор дополнительно снабжен приспособлением подачи смазки и хладагента в зазор, с которым расположено тело относительно камеры, кроме того, тело выполнено с возможностью дополнительного охлаждения.
В реакторе приспособление подачи смазки и хладагента в зазор, реализовано в виде трубок для подачи воздуха, выполняющего функцию смазки и хладагента, или воды, выполняющей функцию смазки и хладагента.
В реакторе тело выполнено с возможностью дополнительного охлаждения посредством сформированных в нем каналов для пропускания по ним хладагента - воды или воздуха.
В реакторе зазор между указанными поверхностями с указанным покрытием, обеспечивающий отсутствие влияния перепускания смеси реагентов на процесс переработки, по величине равен от 5 до 20 мкм, включая указанные значения интервала.
В реакторе в паре камера-тело камера выполнена в виде полого цилиндра, в одном основании цилиндра выполнена торцевая стенка, в паре камера-тело тело выполнено в виде поршня, расположение в камере тела - предназначенного для сжатия смеси реагентов при перемещении между зонами верхней и нижней мертвых точек поршня, посредством которого в отношении пары камера-тело обеспечена связь кривошипно-шатунного механизма с шатунами растяжения, реализовано со стороны другого основания цилиндра, поршень выполнен в составе образующего головку поршня днища, соединенного с юбкой, которая снабжена по бокам парой наружных Т-образных поршневых пальцев, состоящих из соединенной с юбкой ножки и соединенной с ножкой своей средней частью штанги, при этом камера-цилиндр снабжена прорезями, в которых ножками расположены Т-образные поршневые пальцы с выводом штанг наружу относительно камеры-цилиндра, концы штанг выполнены с возможностью подвижного соединения с шатунами растяжения, поверхности днища поршня и торцевой стенки, ориентированные навстречу друг к другу, выполнены плоскопараллельными.
В реакторе в установленных на одной и той же прямой парах камера-тело с симметричным расположением плоскостей, проходящих через зоны верхних мертвых точек, и плоскостей, проходящих через зоны нижних мертвых точек, относительно плоскости, перпендикулярной прямой, на которой установлены пары камера-тело, в каждой паре камера-тело камера выполнена в виде полого цилиндра, при этом в основании цилиндра, наименее удаленном от плоскости, относительно которой симметрично расположены плоскости, проходящие через зоны верхних мертвых точек, и плоскости, проходящие через зоны нижних мертвых точек, выполнена торцевая стенка, пары камера-тело расположены торцевыми стенками навстречу друг к другу, в каждой паре камера-тело каждое тело выполнено в виде поршня, при этом расположение в каждой камере каждого тела - каждого из предназначенных для сжатия смеси реагентов при их перемещении между зонами верхней и нижней мертвых точек поршней, посредством которых в отношении каждой пары камера-тело обеспечена связь кривошипно-шатунного механизма с шатунами растяжения с формированием одинаковой кинематической цепи, с возможностью синхронного поступательно-возвратного перемещения к зонам верхней мертвой точки и зонам нижней мертвой точки каждого тела в каждой камере, реализовано со стороны каждой камеры-цилиндра, наиболее удаленной от плоскости, относительно которой симметрично расположены плоскости, проходящие через зоны верхних мертвых точек, и плоскости, проходящие через зоны нижних мертвых точек, в парах камера-тело каждый поршень выполнен в составе образующего головку поршня днища, соединенного с юбкой, которая снабжена по бокам парой наружных Т-образных поршневых пальцев, состоящих из соединенной с юбкой ножки и соединенной с ножкой своей средней частью штанги, при этом каждая камера-цилиндр снабжена прорезями, в которых ножками расположены Т-образные поршневые пальцы с выводом штанг наружу относительно камеры-цилиндра, концы штанг выполнены с возможностью подвижного соединения с шатунами растяжения, поверхности днища поршня и торцевой стенки, ориентированные навстречу друг к другу, выполнены плоскопараллельными.
В реакторе цилиндр выполнен круглым, соответственно, поршень выполнен с круглым днищем, юбка выполнена цилиндрообразной, соединение днища с юбкой выполнено с одного торца цилиндрообразной юбки, юбка снабжена по бокам парой наружных Т-образных поршневых пальцев со второго торца цилиндрообразной юбки, которые расположены диаметрально противоположно друг относительно друга, соответственно, прорези цилиндра, в которых ножками расположены Т-образные поршневые пальцы, выполнены вдоль образующей цилиндра диаметрально противоположными.
В реакторе в центральной части торцевой стенки выполнен канал вывода с управляемым клапаном вывода в виде выходного отверстия, которое снабжено управляемым клапаном вывода, в части цилиндра, характеризующейся цилиндрической поверхностью, реализован канал ввода с управляемым клапаном ввода, канал ввода выполнен в составе пары снабженных управляемыми клапанами ввода входных отверстий для подачи реагентов в рабочий объем, отверстия с управляемыми клапанами выполнены в цилиндре таким образом, что центры отверстий расположены в плоскости одного и того же поперечного сечения и с равным удалением центров отверстий относительно прямой, вдоль которой установлена пара камера-тело, выполненные в паре камера-тело датчик давления в рабочем объеме и датчик вывода продукта переработки из рабочего объема размещены вне рабочих объемов, датчик давления установлен на торцевой стенке, а датчик вывода продукта переработки из рабочего объема установлен на выходном отверстии.
В реакторе в центральных частях торцевых стенок, которыми пары камера-тело расположены навстречу друг другу и которые выполнены в основаниях цилиндров, наименее удаленных от плоскости, относительно которой симметрично расположены плоскости, проходящие через зоны верхних мертвых точек, и плоскости, проходящие через зоны нижних мертвых точек, выполнены расположенные между зонами верхних мертвых точек пар камера-тело каналы вывода с управляемыми клапанами вывода в виде выходных отверстий, которые снабжены управляемыми клапанами вывода, в частях цилиндров, характеризующихся цилиндрической поверхностью, реализованы расположенные между зонами нижних мертвых точек пар камера-тело каналы ввода с управляемыми клапанами ввода, каждый канал ввода реализован в составе пары снабженных управляемыми клапанами ввода входных отверстий для подачи реагентов в рабочий объем, отверстия с управляемыми клапанами выполнены в каждом цилиндре таким образом, что центры отверстий расположены в плоскости одного и того же поперечного сечения и с равным удалением центров отверстий относительно прямой, на которой установлены пары камера-тело, выполненные в парах камера-тело датчики давления в рабочих объемах и датчики вывода продукта переработки из рабочих объемов с расположением их между зонами верхних мертвых точек пар камера-тело размещены вне рабочих объемов, датчики давления установлены на торцевых стенках, а датчики вывода продукта переработки из рабочих объемов установлены на выходных отверстиях.
В реакторе в качестве управляемого клапана вывода выполнен электромеханический, или механический клапан, а в качестве управляемого клапана ввода выполнен электромагнитный клапан, датчик вывода продукта переработки выполнен в виде термопары, а датчик давления выполнен в виде тензодатчика веса.
В реакторе программно-аппаратный комплекс, с которым связаны управляемые клапаны, датчик давления, датчик вывода продукта переработки, кривошипно-шатунный механизм с шатунами растяжения выполнен на базе компьютера, связанного с контроллером, с осуществлением подачи управляющих команд к управляемым клапанам каналов ввода и вывода, кривошипно-шатунному механизму с шатунами растяжения и передачи данных от датчика давления, датчика вывода продукта переработки посредством контроллера, управляемый клапан канала вывода связан с контроллером программно-аппаратного комплекса через датчик вывода продуктов, кривошипно-шатунный механизм с шатунами растяжения связан с контроллером через вал внешнего источника вращающего момента.
В реакторе внешний источник вращающего момента выполнен в виде электродвигателя.
В реакторе камера закалки, которой снабжена пара камера-тело, выполненная с возможностью сообщения с рабочим объемом через управляемый клапан канала вывода, реализована в составе двух трубчатообразных одинаковых симметрично расположенных относительно плоскости, проходящей через прямую, вдоль которой установлена пара камера-тело, причем такой плоскости, в которой расположен перпендикуляр к прямой, вдоль которой установлена пара камера-тело, являющейся плоскостью симметрии камеры закалки, частей, с выходящими концами, снабженными штуцерами, трубчатообразные части соединены переходником, выполненным симметричным относительно плоскости симметрии камеры закалки, а управляемый клапан канала вывода выполнен в виде золотникового газораспределительного механизма, который установлен в переходнике, кроме того, камера закалки выполнена с возможностью заполнения ее холодным инертным газом или содержания ее в состоянии холодного вакуума с заданием в ней требуемого давления.
При этом в реакторе управляемый клапан вывода выполнен в виде золотникового газораспределительного механизма в составе вращающегося золотника и связанного с ним вала, ось вращения которого расположена в плоскости симметрии камеры закалки, вращающийся золотник выполнен с геометрической конфигурацией, соответствующей телу вращения с осью вращения, совпадающей с осью вращения вала, внутри золотника сформирована полость с входным отверстием с осью, совпадающей с осью вращения вала, золотник снабжен, по крайней мере, одним боковым относительно оси вращения сквозным фигурным окном, характеризующимся геометрией, обеспечивающей образование при пересечении контура окна множеством плоскостей, проходящих через ось вращения вала, множества отрезков с индивидуальной длиной, геометрическая конфигурация и размеры золотника заданы исходя из условия возможности расположения фигуры поперечного сечения трубчатообразной части, выбранного в области соединения ее с переходником, во внутренней области фигуры сечения золотника, полученного в плоскости, в которой расположена ось вращения, при установке золотникового газораспределительного механизма в переходнике, золотник установлен в переходнике между частями трубчатообразной камеры закалки, вал - в плоскости симметрии камеры закалки, при этом вращающийся золотник со стороны входа в его полость установлен с примыканием входным отверстием полости к поверхности камеры с охватом канала вывода целиком входным отверстием полости, либо вращающийся золотник со стороны входа в его полость установлен в канале вывода с примыканием золотника к поверхности канала вывода, как в одном случае, так и в другом случае, установка произведена с возможностью образования между камерой и золотником скользящего равномерно плотного контакта при вращении золотника, а частью, в которой выполнено, по крайней мере, одно боковое сквозное фигурное окно, вращающийся золотник установлен с примыканием к переходнику, с возможностью образования между переходником и золотником скользящего равномерно плотного контакта при вращении золотника, и реализацией сообщения полости золотника с объемом каждой из частей трубчатообразной камеры закалки посредством фигурного окна.
В реакторе каждая пара камера-тело снабжена камерой закалки, выполненной симметричной относительно плоскости, перпендикулярной плоскостям, проходящим через зоны верхних мертвых точек, и плоскостям, проходящим через зоны нижних мертвых точек, и проходящей через прямую, на которой установлены пары камера-тело, и каждая камера закалки выполнена с возможностью сообщения с рабочим объемом через управляемый клапан канала вывода, а именно, каждая камера закалки реализована в выполненном встык с парами камера-тело картере, в составе двух трубчатообразных одинаковых симметрично расположенных относительно плоскости, перпендикулярной плоскостям, проходящим через зоны верхних мертвых точек, и плоскостям, проходящим через зоны нижних мертвых точек, и проходящей через прямую, на которой установлены пары камера-тело, являющейся плоскостью симметрии камеры закалки, частей с выходящими наружу относительно картера концами, снабженными штуцерами, в картере трубчатообразные части соединены переходником, выполненным симметричным относительно плоскости симметрии камеры закалки, а управляемый клапан канала вывода выполнен в виде золотникового газораспределительного механизма, который установлен в переходнике, кроме того, каждая камера закалки выполнена с возможностью заполнения ее холодным инертным газом или содержания ее в состоянии холодного вакуума с заданием в ней требуемого давления.
При этом в реакторе управляемый клапан вывода выполнен в виде золотникового газораспределительного механизма в составе вращающегося золотника и связанного с ним вала, ось вращения которого расположена в плоскости симметрии камеры закалки, вращающийся золотник выполнен с геометрической конфигурацией, соответствующей телу вращения с осью вращения, совпадающей с осью вращения вала, внутри золотника сформирована полость с входным отверстием с осью, совпадающей с осью вращения вала, золотник снабжен, по крайней мере, одним боковым относительно оси вращения сквозным фигурным окном, характеризующимся геометрией, обеспечивающей образование при пересечении контура окна множеством плоскостей, проходящих через ось вращения вала, множества отрезков с индивидуальной длиной, геометрическая конфигурация и размеры золотника заданы исходя из условия возможности расположения фигуры поперечного сечения трубчатообразной части, выбранного в области соединения ее с переходником, во внутренней области фигуры сечения золотника, получаемого в плоскости, в которой расположена ось вращения, при установке золотникового газораспределительного механизма в переходнике, золотник установлен в переходнике между частями трубчатообразной камеры закалки, вал - в плоскости симметрии камеры закалки, при этом вращающийся золотник со стороны входа в его полость установлен с примыканием входным отверстием полости к поверхности камеры с охватом канала вывода целиком входным отверстием полости, либо вращающийся золотник со стороны входа в его полость установлен в канале вывода с примыканием золотника к поверхности канала вывода, в обоих случаях установка произведена с возможностью образования между камерой и золотником скользящего равномерно плотного контакта при вращении золотника, а частью, в которой выполнено, по крайней мере, одно боковое сквозное фигурное окно, вращающийся золотник установлен с примыканием к переходнику, с возможностью образования между переходником и золотником скользящего равномерно плотного контакта при вращении золотника, и реализацией сообщения полости золотника с объемом каждой из частей трубчатообразной камеры закалки посредством фигурного окна.
Вращающийся золотник выполнен с геометрической конфигурацией, соответствующей телу вращения, а именно конусу, или цилиндру, или шару.
В золотнике, снабженном, по крайней мере, одним боковым сквозным фигурным окном, характеризующимся геометрией, обеспечивающей образование при пересечении контура окна множеством плоскостей, проходящих через ось вращения вала, множества отрезков с индивидуальной длиной, фигурное окно сформировано в форме полукруга, или четверти круга, или треугольника.
В реакторе канал ввода, реализованный в составе пары снабженных управляемыми клапанами ввода входных отверстий для подачи реагентов в рабочий объем, соединен со средствами подачи реагентов, одно входное отверстие выполнено для подачи основного реагента, содержащего перерабатываемое вещество, и соединено с узлом подготовки и подачи основного реагента посредством управляемого клапана ввода, обеспечивающего требуемую дозировку его поступления в рабочий объем, связанного с программно-аппаратным комплексом, второе входное отверстие выполнено для подачи вспомогательного реагента, содержащего вспомогательное вещество, и соединено с узлом подготовки и подачи вспомогательного реагента, выполненным в составе воздухонагнетателя, регулятора температуры воздуха, эжекторного смесителя, теплообменника, при этом воздухонагнетатель через регулятор температуры воздуха соединен с эжекторным смесителем с возможностью подачи в него нагнетаемого воздуха после коррекции температуры для смешивания с подаваемыми в эжекторный смеситель необходимыми для протекания реакции переработки вспомогательными веществами, эжекторный смеситель соединен с теплообменником с возможностью подачи в последний воздуха, смешанного со вспомогательными веществами, для последующей температурной коррекции, теплообменник связан со вторым отверстием для подачи вспомогательного реагента посредством управляемого клапана ввода, обеспечивающего требуемую дозировку его поступления в рабочий объем, связанного с программно-аппаратным комплексом.
Сущность технического решения поясняется нижеследующим описанием и прилагаемыми фигурами.
На Фиг. 1 показано качественное изменение давления в химическом реакторе сжатия с течением времени при уменьшении рабочего объема за счет перемещения тела, где: кривая штриховой линией - для известных решений; кривая сплошной линией - для предлагаемого решения.
На Фиг. 2 показан вид сбоку химического реактора сжатия, содержащего две пары камера-тело, где: 1 - камера (цилиндр); 3 - картер; 5 - шатун растяжения; 6 - зубчатое колесо; 10 - получающий вращение вал (ось зубчатого колеса); 11 - цилиндрический выступ (шип).
На Фиг. 3 показан вид сверху химического реактора сжатия, содержащего две пары камера-тело, где: 1 - камера (цилиндр); 2 - тело (поршень); 3 - картер; 4 - золотник; 5 - шатун растяжения; 6 - зубчатое колесо; 8 - штуцер канала ввода; 9 - штуцер канала ввода.
На Фиг. 4 приведены А - выносной элемент, касающийся выполнения золотникового газораспределительного механизма, связывающего камеру закалки и рабочий объем пары камера-тело, Б - выносной элемент, касающийся выполнения выходящих наружу концов камеры закалки, где: 1 - камера (цилиндр); 2 - тело (поршень); 3 - картер; 4 - золотник; 7 - штуцер вывода; В - фигурное окно; КЗ - камера закалки; РО - рабочий объем.
На Фиг. 5 приведено изображение химического реактора сжатия, содержащего две пары камера-тело, с кривошипно-шатунным механизмом, реализованным в составе пары передающих вращение валов от внешнего источника вращающего момента, пары ведущих зубчатых колес, двух пар получающих вращение валов, двух пар кривошипов, двух пар ведомых зубчатых колес, двух групп шатунов, содержащих по четыре шатуна, где: 1 - камера (цилиндр); 2 - тело (поршень); 3 - картер; 5 - шатун растяжения; 7 - штуцер вывода; 8 - штуцер канала ввода; 9 - штуцер канала ввода; 12 - передающий вращение вал; 13 - ведущее зубчатое колесо; 14 - получающий вращение вал; 15 - ведомое зубчатое колесо; 16 - кривошип.
На Фиг. 6 приведено изображение химического реактора сжатия, содержащего две пары камера-тело, с кривошипно-шатунным механизмом, реализованным в составе двух пар передающих вращение валов от внешнего источника вращающего момента, двух пар ведущих зубчатых колес, двух пар получающих вращение валов, двух пар кривошипов, двух пар ведомых зубчатых колес, двух групп шатунов, содержащих по четыре шатуна, где: 1 - камера (цилиндр); 2 - тело (поршень); 3 - картер; 5 - шатун растяжения; 7 - штуцер вывода; 8 - штуцер канала ввода; 9 - штуцер канала ввода; 12 - передающий вращение вал; 13 - ведущее зубчатое колесо; 14 - получающий вращение вал; 15 - ведомое зубчатое колесо; 16 - кривошип.
На Фиг. 7 приведено изображение химического реактора сжатия, содержащего две пары камера-тело, с кривошипно-шатунным механизмом в составе двух пар получающих вращение валов от внешнего источника вращающего момента, четырех пар зубчатых колес, снабженных на их дисковой поверхности цилиндрическим выступом с осью, смещенной относительно оси вращения зубчатого колеса, двух групп шатунов, содержащих по четыре шатуна, где 1 - камера (цилиндр); 2 - тело (поршень); 3 - картер; 5 - шатун растяжения; 6 - зубчатое колесо; 7 - штуцер вывода; 8 - штуцер канала ввода.
Функциональной основой реактора является пара камера-тело - реакционная камера и расположенное в ней тело для сжатия смеси реагентов при его перемещении между зонами верхней и нижней мертвых точек, отграничивающее при нахождении его в зоне нижней мертвой точки рабочий объем в камере, кривошипно-шатунный механизм, обеспечивающий перемещение тела и сжатие смеси. Реакционная камера снабжена каналом ввода реагентов в рабочий объем и каналом вывода продукта переработки из рабочего объема. Реактор, содержащий в своем составе только перечисленное, может обеспечить переработку реакционноспособной смеси с перерабатываемым веществом лишь на основе опосредованного управления давлением в рабочем объеме реакционной камеры через изменение объема на протяжении цикла сжатие-расширение. Построение процесса переработки базируется на реализации непосредственного управления величиной объема. Достижение параметров процесса, обуславливающих запуск реакции переработки и ее протекание, в частности, температуры и давления смеси реагентов обеспечивается через изменение рабочего объема.
Рабочий объем - объем, занимаемый реакционноспособной газообразной смесью (смесью реагентов), содержащей перерабатываемое вещество, при подаче ее посредством канала ввода в камеру. Величина рабочего объема меняется при осуществлении цикла сжатие-расширение. В максимуме может быть равной по величине объему реакционной камеры за вычетом объема, занимаемого перемещающимся телом, когда последнее находится в зоне нижней мертвой точки, и части объема реакционной камеры за зоной нижней мертвой точки, незаполненной смесью. В минимуме может быть равной нулю, когда перемещающееся тело находится в зоне верхней мертвой точки и, если пределы перемещения тела в зону верхней мертвой точки совпадают с пространственными пределами реакционной камеры, а зона верхней мертвой точки занимает в камере самое крайнее положение. Перемещение тела вызывает изменение величины рабочего объема, и в определенный момент фазы перемещения тела в зону верхней мертвой точки при сжатии смеси в реакционной камере происходит достижение такой величины объема, заполненного смесью реагентов, при которой инициируется запуск реакции переработки. Таким образом, в результате уменьшения объема и сжатия смеси, введенной в рабочий объем камеры, в последней устанавливаются условия, подходящие для протекания реакции переработки требуемого вещества, - давление (Pr) и температура смеси, соответствующие инициации требуемой реакции, в частности, самовоспламенения (см. Фиг. 1, кривая штриховой линией, момент времени t1). Далее, при перемещении тела в направлении зоны верхней мертвой точки объем уменьшается, давление продолжает нарастать, нарастая от величины давления запуска реакции переработки и достигая максимума, после чего падает, достигая величины, соответствующей давлению запуска требуемой реакции, (см. Фиг. 1, кривая штриховой линией, временной промежуток t1-t2). При достижении телом зоны верхней мертвой точки давление в рабочем объеме устанавливается на еще более низком значении.
Описанный характер изменения давления в рабочем объеме реакционной камеры обусловлен параметрами движения перемещающегося тела, которое совершает свое возвратно-поступательное движение с постоянной частотой в заданных пространственных пределах камеры, без реализации возможности изменения параметров движения тела в цикле сжатие-расширение.
Таким образом, при осуществлении процесса переработки происходит варьирование одновременно нескольких параметров: объем, давление, температура смеси. При сжатии непрерывно меняют свое значение объем и давление. Давление меняется вследствие изменения объема и вызывает температурные изменения. Отклонение давления от величины, обеспечивающей протекание требуемой реакции переработки, - Pr (см. Фиг. 1) в большую сторону приводит к инициации других, помимо требуемой, реакций - побочных (паразитных) реакций, управление протекающей химической реакцией, обуславливающей получение требуемого продукта, отсутствует.
Кроме того, после достижения Pr в игру вступают факторы, обусловленные протеканием реакции и вызываемыми ею изменениями в отношении введенной реакционноспособной смеси, то есть образованием продуктов. Формируется обратная связь. Присутствие в рабочем объеме образованных продуктов в результате осуществляемой переработки начинает влиять на ход процесса, в свою очередь оказывая влияние на условия в рабочем объеме, которые обуславливают протекающие реакции, и которые отличаются от условий протекания требуемой реакции переработки.
Для условий протекания требуемой реакции переработки - давления Pr характерно кратковременность их установления в реакционной камере (см. Фиг. 1, кривая штриховой линией) на протяжении сжатия смеси реагентов.
В результате происходит перерыв в протекании реакции переработки с получением требуемого продукта при сжатии после ее запуска, наработка требуемого продукта при сжатии осуществляется в течение короткого временного промежутка, соответствующего установлению в камере давления на уровне Pr, получаемое количество требуемого продукта переработки относительно исходного перерабатываемого вещества незначительно, с характерной не очень высокой чистотой продукта, с довольно высоким содержанием побочных продуктов, с невысокой экологичностью.
В предлагаемом реакторе построение процесса переработки базируется на реализации непосредственного управления величиной давления в реакционной камере на протяжении всего временного периода после запуска реакции переработки и, как следствие, реализации управления реакцией. Это обеспечивает достижение непрерывности протекания реакции переработки с получением требуемого продукта при сжатии после ее запуска, пролонгирование времени наработки требуемого продукта при сжатии, повышение отношения количества полученного конечного продукта к количеству исходного перерабатываемого вещества.
Так, в целях управления давлением и реализации управления химической реакцией в предлагаемом реакторе пара камера-тело снабжена датчиком давления в ее рабочем объеме, датчиком вывода продукта переработки из рабочего объема. В каналах ввода и вывода установлены управляемые клапаны, соответственно, ввода и вывода. Для управления работой реактора, отслеживания состояния давления в рабочем объеме, наличия в нем продукта переработки и подачи команд, на поддержание давления на требуемом уровне, выполнен программно-аппаратный комплекс. С ним связаны управляемые клапаны, датчик давления, датчик вывода продукта переработки. Пара камера-тело (см. Фиг. 2, 3) снабжена камерой закалки. Камера закалки (см. Фиг. 3 и 4) выполнена с возможностью сообщения с рабочим объемом через управляемый клапан канала вывода и с возможностью выполнения в отношении канала вывода функции дросселя - пневматического. Пневматический дроссель, функцию которого выполняет камера закалки, на пути движения газообразного продукта через канал вывода с управляемым клапаном регулирует количество проходящего продукта или смесей продуктов. Функция дросселя реализуется тем, что в камере закалки, в которую поступает продукт переработки, поддерживают такой уровень давления, который в зависимости от необходимости либо способствует более интенсивному выводу продукта переработки из рабочего объема, либо снижает интенсивность вывода продукта переработки, что отражается на величине давления в рабочем объеме. Газовая среда в камере закалки, в которую после переработки поступает из рабочего объема продукт реакции для охлаждения и закалки, с устанавливаемым в ней давлением за счет последнего препятствует или, наоборот, способствует выходу продуктов переработки и/или непрореагировавших реагентов из рабочего объема реакционной камеры. Таким образом, устанавливаемое давление в камере закалки регулирует пропускную способность канала вывода, управляя этим величиной давления и, как следствие, химической реакцией в рабочем объеме.
Реализованные возможности управления давлением и, как следствие, химической реакцией через управляемые клапаны, камеру закалки, выполняющую функцию дросселя, обеспечивают после установления условий, подходящих для протекания реакции переработки требуемого вещества, - давления (Pr) и температуры смеси, соответствующих инициации требуемой реакции, поддержание в рабочем объеме постоянного давления на уровне Pr на протяжении дальнейшего сжатия смеси реагентов (см. Фиг. 1, кривая сплошной линией, временной промежуток t3-t4). Требуемая реакция переработки протекает непрерывно на протяжении временного промежутка t3-t4. Посредством управляемых клапанов и наличия камеры закалки возможно регулировать количество подаваемых в рабочий объем реагентов и находящихся в рабочем объеме. Этими же средствами достигается в рабочем объеме более раннее установление давления (Pr) и температуры реагентов, соответствующих запуску реакции переработки, и более позднее прекращение реакции переработки, подавление протекания в рабочем объеме паразитных реакций, приводящих к образованию побочных продуктов переработки. Как следствие, происходит пролонгирование времени наработки требуемого продукта, увеличение количества требуемого продукта, снижение количества продуктов, образующихся за счет паразитных реакций, повышение экологичности переработки.
В составе вышеуказанной функциональной основы реактора приведен кривошипно-шатунный механизм, обеспечивающий перемещение тела и сжатие смеси реагентов. Конкретный диапазон изменения давления в рабочем объеме реакционной камеры обусловлен параметрами движения перемещающегося тела, совершающего свое возвратно-поступательное движение с заданной частотой, в заданных пространственных пределах камеры. Параметры движения определяются кривошипно-шатунным механизмом.
Кривошипно-шатунный механизм - один из распространенных механизмов преобразования движения. В рассматриваемом случае преобразует вращательное движение, передаваемое от источника внешнего вращающего момента, в возвратно-поступательное движение тела. Механизм, используемый в известных технических решениях, в указанной функциональной основе реактора, может быть выполнен в составе стойки, в которой расположен передающий вращение вал от внешнего источника вращающего момента, кривошипа, жестко связанного с валом и совершающего вращательное движение, шатуна, соединенного одним концом с кривошипом посредством цилиндрического выступа (шипа) на кривошипе, а вторым концом, соединенного подвижно с телом, обеспечивая возможность совершения телом возвратно-поступательного движения. В фазе сжатия смеси реагентов тело совершает движение, производя уменьшение величины рабочего объема и сжимая смесь реагентов, за счет толкающего усилия шатуна. Стандартный диапазон достигаемых на практике рабочих давлений довольно узок, составляет не более 25 атм. Положение зон верхней и нижней мертвых точек жестко детерминировано. Переработка веществ, для которых инициация реакции происходит при более высоких давлениях и требуется сжатие смеси реагентов при осуществлении переработки до больших давлений, оказывается невозможна. Кроме того, для переработки конкретного вещества смесь реагентов с этим веществом должна быть соответствующим образом подготовлена в температурном отношении. Она должна иметь подходящую температуру, согласованную с диапазоном рабочих давлений, в котором функционирует реактор, чтобы в ходе сжатия смеси обеспечить условия запуска реакции переработки. Узость диапазона достигаемых рабочих давлений обуславливает необходимость тщательной предварительной подготовки смеси, с доведением ее до приемлемых температур, согласованных с диапазоном рабочих давлений, образующих также узкий диапазон.
При использовании приведенной здесь конструкции кривошипно-шатунного механизма длина хода тела в камере определяется длиной кривошипа, радиусом окружности, которую описывает конец шатуна, связанный с кривошипом. На первый взгляд, варьируя длину кривошипа, радиус окружности, описываемой концом шатуна, и применяя более мощный привод, возможно расширить диапазон рабочих давлений. Однако, указанных мер может быть недостаточно. Поскольку тело совершает перемещения в камере, сжимая смесь реагентов, в результате толкающего усилия шатуна, то последний является слабым звеном, испытывая противодействие со стороны сжимаемой смеси рабочего объема, подвергается повышенной нагрузке. Повышенная нагрузка с течением времени приводит к тому, что шатун может выйти из строя. В частности, произойдет поломка стержня шатуна. Как следствие, напрашивается вывод о необходимости усиления конструкции шатуна - его стержня. Усиление стержня возможно за счет увеличения его размеров в поперечнике. Но такой стержень будет более массивным, потребуются большие усилия на приведение шатуна в движение и, в конечном счете, обеспечить выигрыш в давлении не удастся.
Кроме того, приведенная конструкция кривошипно-шатунного механизма не обеспечивает возможности для регулирования положения зон верхней и нижней мертвых точек. Их положение в реакционной камере строго определяется длиной кривошипа.
В предлагаемом ректоре достижение расширения интервала рабочих давлений, расширение ассортимента перерабатываемых веществ, достижение возможности регулирования положения зоны верхней мертвой точки в реакционной камере, расширение интервала температур предварительного подогрева смеси реагентов, снижение его нижнего значения и/или повышение верхнего значения, снижение энергозатрат на переработку вещества, обеспечивается за счет использования кривошипно-шатунного механизма с шатунами растяжения (см. Фиг. 2, 3, 5-7). Причем кривошипно-шатунного механизма с шатунами растяжения, связанного с выполненным в реакторе программно-аппаратным комплексом, который управляет его работой.
Использование кривошипно-шатунного механизма, связанного с программно-аппаратным комплексом, позволяет осуществить регулировку положения зоны верхней мертвой точки. Выбрав кривошип, обеспечивающий радиус окружности, которую описывает конец шатуна, связанный с кривошипом, превышающий половину длины камеры, вдоль которой совершает возвратно-поступательное движение тело, возможно обеспечить регулировку положения в камере зоны верхней мертвой точки. Для остановки тела, производящего при перемещении сжатие смеси, при достижении им в камере требуемых координат от управляющего комплекса подается команда прекратить движение, которая прекращает работу привода (внешнего источника вращающего момента, функцию которого может выполнять электродвигатель), с которым связан кривошипно-шатунный механизм. Таким образом, устраняется жесткая привязка к конкретной реализации кривошипно-шатунного механизма, в частности, к геометрическим размерам кривошипа (его длине), обеспечивающими величину радиуса окружности, описываемой концом шатуна, связанным с кривошипом, величина которого предопределяет пространственные пределы перемещения тела в камере и задает положение зон мертвых точек.
Эта же особенность выполнения кривошипно-шатунного механизма является одним из слагаемых, определяющих достижение расширения интервала рабочих давлений, расширение ассортимента перерабатываемых веществ, расширение интервала температур предварительного подогрева смеси реагентов, снижение его нижнего значения и/или повышение верхнего значения, снижение энергозатрат на переработку вещества. Вторым слагаемым в достижении указанного является использование шатунов растяжения. Переход от использования толкающего усилия шатуна для перемещения тела и сжатия смеси реагентов к тянущему усилию обеспечивает существенный выигрыш в достигаемом давлении при сжатии смеси реагентов. Достигаемые величины давления при сжатии смеси реагентов при применении шатунов растяжения составляют до 200 атм. Таким образом, происходит расширение диапазона используемых рабочих давлений, в свою очередь, обуславливая возможность расширения ассортимента перерабатываемых веществ. При этом более широкий диапазон давлений, реализуемый в реакционной камере, смягчает требования к предварительной подготовке смеси реагентов, с доведением ее до приемлемых температур, согласованных с диапазоном рабочих давлений, гарантирующих достижение при сжатии смеси запуска реакции переработки. Кроме того, поскольку при сжатии в плане приложения усилий тянуть шатун выгоднее, чем его толкать, снижаются энергозатраты на переработку.
Далее, насчет достижения сокращения времени получения готового продукта.
Достижение сокращения времени обусловлено тем, в реакторе пара камера-тело снабжена камерой закалки и для управления работой реактора выполнен программно-аппаратный комплекс, с которым связаны управляемые клапаны, датчики давления, датчики вывода продукта переработки, кривошипно-шатунный механизм с шатунами растяжения, что позволяет перейти на двухтактный режим работы, содержащий такт сжатия - фаза движения тела в направлении зоны верхней мертвой точки и такт расширения - фаза движения тела в направлении зоны нижней мертвой точки (см. Фиг. 2-7). В приведенных известных технических решениях с вышеуказанной функциональной основой реализуется четырехтактный режим работы. Два такта движения тела (сжатие-расширение) приходится на осуществление переработки, и еще два такта (сжатие-расширение) на охлаждение и закалку полученного продукта и вывод его их реакционной камеры.
Нельзя не заметить, что двухтактный режим работы реактора, кроме сокращения времени на получение продукта переработки дает дополнительно выигрыш и в энергозатратах.
В общем случае выполнения химический реактор сжатия содержит кривошипно-шатунный механизм, пару камера-тело, камеру закалки (см. Фиг. 2-4).
Пара камера-тело связана с кривошипно-шатунным механизмом. Пара камера-тело выполнена в составе реакционной камеры 1 и расположенного в ней тела 2. Тело 2 используется для сжатия смеси реагентов при его перемещении между зонами верхней и нижней мертвых точек, отграничивает при нахождении его в зоне нижней мертвой точки рабочий объем в камере 1. В паре камера-тело выполнены канал ввода (см. Фиг 2 и 3, штуцер канала ввода 8 и штуцер канала ввода 9) реагентов в рабочий объем и канал вывода продукта переработки из рабочего объема. Канал ввода пары камера-тело выполнен с возможностью сообщения с рабочим объемом при нахождении тела 2 в зоне нижней мертвой точки. То есть, канал ввода может быть локализован в любом поперечном сечении реакционной камере, удовлетворяющем указанному условию - возможности сообщения с рабочим объемом при нахождении тела 2 в зоне нижней мертвой точки. Канал вывода пары камера-тело выполнен с возможностью сообщения с частью рабочего объема, равной величине рабочего объема за вычетом объема, расположенного между зонами верхней и нижней мертвых точек. То есть, канал вывода может быть локализован в любом поперечном сечении реакционной камере, удовлетворяющем указанному условию. В каналах ввода и вывода установлены управляемые клапаны, соответственно, ввода и вывода.
Кривошипно-шатунный механизм выполнен с шатунами растяжения 5, которыми связан с парой камера-тело (см. Фиг. 2 и 3), с возможностью возвратно-поступательного перемещения к зонам верхней мертвой точки и зонам нижней мертвой точки тела 2 в камере 1.
В паре камера-тело выполнены датчики давления в рабочем объеме и датчики вывода продукта переработки из рабочего объема.
Пара камера-тело снабжена камерой закалки. Камера закалки выполнена с возможностью сообщения с рабочим объемом через управляемый клапан канала вывода.
Для управления работой реактора в нем реализован программно-аппаратный комплекс. С программно-аппаратным комплексом связаны управляемые клапаны, датчик давления, датчик вывода продукта переработки, кривошипно-шатунный механизм с шатунами растяжения.
В частных случаях реализации химический реактора сжатия выполняют с нижеследующими особенностями.
Так, кривошипно-шатунный механизм с шатунами растяжения, которыми связан с парой камера-тело, с возможностью возвратно-поступательного перемещения к зонам верхней мертвой точки и зонам нижней мертвой точки тела в камере может быть реализован в составе валов, кривошипов, зубчатых колес, шатунов растяжения в различных вариантах.
В случае выполнения реактора однокамерным, который относится к общему случаю выполнения, приведена реализация кривошипно-шатунного механизма с шатунами растяжения, в двух нижеследующих вариантах, что не исчерпывает, заметим, всех вариантов его реализации.
В первом случае кривошипно-шатунный механизм реализован в составе пары передающих вращение валов от внешнего источника вращающего момента, пары ведущих зубчатых колес, двух пар получающих вращение валов, двух кривошипов, двух ведомых зубчатых колес, группы шатунов растяжения, содержащей четыре шатуна растяжения. Пара передающих вращение валов установлена на одной оси, проходящей через точку, лежащую на прямой, вдоль которой установлена пара камера-тело (ось установки пары камера-тело). При этом ось передающих вращение валов перпендикулярна прямой, вдоль которой установлена пара камера-тело. С концом каждого передающего вращение вала жестко соединено ведущее зубчатое колесо, с расположением в парах плоскостей ведущих зубчатых колес и, соответственно, концов передающих вращение валов с зазором друг относительно друга. Величина зазора выбрана, с возможностью обеспечения расположения в нем пары камера-тело. Пары получающих вращение валов установлены таким образом, что их оси параллельны оси пары передающих вращение валов, равноудалены от оси пары передающих вращение валов и равноудалены относительно прямой, вдоль которой установлена пара камера-тело (ось установки). На одной и той же оси установлена пара получающих вращение валов. При установке пар получающих вращение валов по осям между их концами выполнен зазор, с которым расположены плоскости ведущих зубчатых колес и, соответственно, концы передающих вращение валов, с которыми жестко соединены ведущие зубчатые колеса. В каждой паре получающих вращение валов, установленных на одной и той же оси, в отношении их концов, которые расположены с зазором, выполнено жесткое соединение ведомого зубчатого колеса - к концу одного получающего вращение вала и выполнено жесткое соединение кривошипа - к концу другого получающего вращение вала. При этом одно ведомое зубчатое колесо расположено в плоскости одного ведущего зубчатого колеса с реализацией их сопряжения для зубчатой передачи. Другое ведомое зубчатое колесо расположено в плоскости другого ведущего зубчатого колеса с реализацией их сопряжения для зубчатой передачи. К каждому ведомому зубчатому колесу, которые снабжены на их дисковой поверхности цилиндрическим выступом с осью, смещенной относительно оси вращения ведомого зубчатого колеса, за счет цилиндрического выступа подвижно подсоединено одним концом по шатуну растяжения. Второй конец шатунов растяжения подвижно связан с телом. Кроме того, к каждому кривошипу, установленному неподвижно на соответствующем получающем вращение валу, за счет цилиндрического выступа на кривошипе подвижно подсоединено одним концом по шатуну растяжения, второй конец которых подвижно связан с телом. В группе из четырех шатунов растяжения, связанных с телом, два шатуна растяжения соединены с кривошипом и два шатуна растяжения - с ведомым зубчатым колесом.
В описанном варианте кривошипно-шатунный механизм с шатунами растяжения выполнен как часть, связанная с одной парой камера-тело, обеспечивающая в ней перемещение тела, кривошипно-шатунного механизма, используемого в реакторе в двухкамерном исполнении (см. Фиг. 5).
Здесь и ниже, пара передающих вращение валов, или пара ведущих зубчатых колес, или пара получающих вращение валов, то есть, пара каких-либо деталей, означает, что эти детали, являясь одинаковыми, расположены на одной и той же оси.
Во втором случае кривошипно-шатунный механизм с шатунами растяжения реализован в составе двух пар получающих вращение валов от внешнего источника вращающего момента, двух пар зубчатых колес, снабженных на их дисковой поверхности цилиндрическим выступом с осью, смещенной относительно оси вращения зубчатого колеса, группы шатунов растяжения, содержащей четыре шатуна растяжения. В этом случае кривошипно-шатунный механизм с шатунами растяжения выполнен как часть, связанная с одной парой камера-тело, обеспечивающая в ней перемещение тела, кривошипно-шатунного механизма, используемого в реакторе в двухкамерном исполнении (см. Фиг. 7). Получающие вращение валы от внешнего источника вращающего момента установлены таким образом, что их оси равноудалены от точки, лежащей на прямой, вдоль которой установлена пара камера-тело. Кроме того, оси получающих вращение валов от внешнего источника вращающего момента равноудалены относительно прямой, вдоль которой установлена пара камера-тело. Оси получающих вращение валов от внешнего источника вращающего момента перпендикулярны плоскости, в которой расположена прямая, вдоль которой установлена пара камера-тело. С концами каждого получающего вращение вала от внешнего источника жестко соединена пара зубчатых колес. В отношении каждого из получающего вращение вала в каждой паре зубчатых колес одно зубчатое колесо расположено в одной плоскости, второе зубчатое колесо расположено в другой плоскости. Между двумя указанными плоскостями сформирован зазор. Причем величина зазора в отношении всех пар зубчатых колес - одна и та же. Зазор сформирован с возможностью расположения в нем пар камера-тело. Зубчатые колеса, расположенные в одной и той же плоскости, сопряжены между собой для зубчатой передачи. К каждому зубчатому колесу за счет цилиндрического выступа подвижно подсоединено одним концом по шатуну растяжения, второй конец которых подвижно связан с телом. В группе из четырех шатунов растяжения два шатуна растяжения соединены с двумя зубчатыми колесами, расположенными в одной плоскости, и два шатуна растяжения - с двумя зубчатыми колесами, расположенными в другой плоскости.
Пара камера-тело реализована, как правило, в виде цилиндра с поршнем.
Например (как см. Фиг. 2 и 3), камера 1 выполнена в виде полого цилиндра. В одном основании цилиндра, выполнена торцевая стенка. В паре камера-тело тело 2 выполнено в виде поршня. Расположение в камере тела 2 - предназначенного для сжатия смеси реагентов при перемещении между зонами верхней и нижней мертвых точек поршня, посредством которого в отношении пары камера-тело обеспечена связь кривошипно-шатунного механизма с шатунами растяжения, реализовано со стороны другого основания цилиндра. Поршень выполнен в составе образующего головку поршня днища, соединенного с юбкой, которая снабжена по бокам парой наружных Т-образных поршневых пальцев, состоящих из соединенной с юбкой ножки и соединенной с ножкой своей средней частью штанги. Камера 1 - цилиндр снабжена прорезями, в которых ножками расположены Т-образные поршневые пальцы с выводом штанг наружу относительно камеры 1 - цилиндра. Концы штанг выполнены с возможностью подвижного соединения с шатунами растяжения 5. Поверхности днища поршня и торцевой стенки, ориентированные навстречу друг к другу, выполнены плоскопараллельными.
В центральной части торцевой стенки выполнен канал вывода с управляемым клапаном вывода. Канал вывода представляет собой выходное отверстие, которое снабжено управляемым клапаном вывода. В части цилиндра (как см. Фиг. 2 и 3), характеризующейся цилиндрической поверхностью, реализован канал ввода с управляемым клапаном ввода. Канал ввода выполнен в составе пары снабженных управляемыми клапанами ввода входных отверстий для подачи реагентов в рабочий объем. Отверстия с управляемыми клапанами выполнены в цилиндре таким образом, что центры отверстий расположены в плоскости одного и того же поперечного сечения и с равным удалением центров отверстий относительно прямой, вдоль которой установлена пара камера-тело (оси пары камера-тело). Датчик давления в рабочем объеме и датчик вывода продукта переработки из рабочего объема размещены вне рабочих объемов. Датчик давления установлен на торцевой стенке, а датчик вывода продукта переработки из рабочего объема установлен на выходном отверстии.
Камера закалки КЗ (см. Фиг. 4), которой снабжена пара камера-тело, выполненная с возможностью сообщения с рабочим объемом РО через управляемый клапан канала вывода, реализована в составе двух трубчатообразных частей, с выходящими концами, снабженными штуцерами 7. Указанные трубчатоообразные части - одинаковы, симметрично расположены относительно плоскости, проходящей через прямую, вдоль которой установлена пара камера-тело, причем такой плоскости, в которой расположен перпендикуляр к прямой, вдоль которой установлена пара камера-тело, являющейся плоскостью симметрии камеры закалки. Трубчатообразные части соединены переходником, выполненным симметричным относительно плоскости симметрии камеры закалки. Управляемый клапан канала вывода выполнен в виде золотникового газораспределительного механизма. Указанный механизм установлен в переходнике. Кроме того, камера закалки КЗ выполнена с возможностью заполнения ее холодным инертным газом или содержания ее в состоянии холодного вакуума с заданием в ней требуемого давления.
В частном случае реализации химический реактор сжатия выполняют двухкамерным. Так, в реакторе выполнена дополнительная такая же пара камера-тело (см. Фиг. 2, 3, 5-7). Обе пары камера-тело установлены на одной и той же прямой с симметричным расположением плоскостей, проходящих через зоны верхних мертвых точек, и плоскостей, проходящих через зоны нижних мертвых точек, относительно плоскости, перпендикулярной прямой, на которой установлены пары камера-тело.
Кривошипно-шатунный механизм шатунами растяжения 5 связан с каждой парой камера-тело с формированием одинаковой кинематической цепи, что обеспечивает возможность синхронного возвратно-поступательного перемещения к зонам верхней мертвой точки и зонам нижней мертвой точки каждого тела 2 в каждой камере 1.
В обеих парах камера-тело выполнены датчики давления в рабочих объемах и датчики вывода продукта переработки из рабочих объемов с расположением их между зонами верхних мертвых точек пар камера-тело. Каналы ввода пар камера-тело, каждый из которых выполнен с возможностью сообщения с рабочим объемом при нахождении каждого тела в зоне нижней мертвой точки, расположены между зонами нижних мертвых точек пар камера-тело. Каналы вывода пар камера-тело, каждый из которых выполнен с возможностью сообщения с частью рабочего объема, равной величине рабочего объема за вычетом объема, расположенного между зонами верхней и нижней мертвых точек, расположены между зонами верхних мертвых точек пар камера-тело. В обоих каналах ввода и обоих каналах вывода установлены управляемые клапаны, соответственно, ввода и вывода.
Каждая пара камера-тело снабжена камерой закалки, выполненной с возможностью сообщения с рабочим объемом через управляемый клапан канала вывода. Каждая камера закалки выполнена симметричной относительно плоскости, перпендикулярной плоскостям, проходящим через зоны верхних мертвых точек и зоны нижних мертвых точек, и проходящей через прямую, на которой установлены пары камера-тело.
Программно-аппаратный комплекс связан с управляемыми клапанами, датчиками давления, датчиками вывода продукта переработки обеих пар камера-тело.
Приведенными особенностями выполнения в двухкамерном реакторе обеспечивается достижение уравновешенности реактора, низкого уровня шума, устранение вибраций при его работе.
Выполнение в реакторе единственной пары камера-тело (реализация его одноцилиндровым или однокамерным) обуславливает его неуравновешенность, шум и вибрации. Значительные вибрации возникают при изменении направления движения тела и шатуна. Необходимы балансирующие противовесы для снижения этих вибраций. Однако по причинам, связанным с возникновением сил инерций 1-ого и 2-го порядка, применение балансиров не может полностью сбалансировать движение тела и шатуна. Кроме того, возникают вибрации, связанные с изменениями скорости и кинетической энергии тела. В дополнение к перечисленному, заметим, что возникновение вибраций происходит и из-за того, что в реакторе осуществляется переработка только во время рабочего хода, при сжатии смеси реагентов, введенных в рабочий объем.
Для устранения шума и вибраций при работе реактора, достижения его уравновешенности в реакторе выполнена дополнительная пара камера-тело, осуществляющая функцию балансира. Обе пары камера-тело установлены на одной и той же прямой (см. Фиг. 2, 3, 5-7) указанным образом, уравновешивая друг друга. При этом установлены таким образом, что обеспечивается симметричное расположение плоскостей, проходящих через зоны верхних мертвых точек, и плоскостей, проходящих через зоны нижних мертвых точек, относительно плоскости, перпендикулярной прямой, на которой установлены пары камера-тело.
Кривошипно-шатунный механизм с шатунами растяжения связан с формированием одинаковой кинематической цепи с каждой парой камера-тело. Идентичность формируемых кинематических цепей означает реализацию их для каждой пары камера-тело одинаковыми наборами элементов кривошипно-шатунного механизма в отношении состава элементов, формы их выполнения, связей между элементами, пространственного расположения, материалов, используемых для выполнения, то есть наборами, уравновешивающими друг друга (см. Фиг. 2, 3, 5-7). Для каждого элемента кривошипно-шатунного механизма одного набора выполнен геометрически симметричный элемент из другого набора, с уравновешиванием элементами друг друга (см. Фиг. 2, 3, 5-7). Так, группа шатунов растяжения, связанных с одной парой камера-тело, из одного набора и группа шатунов растяжения, связанных со второй парой камера-тело, из второго набора симметрична относительно плоскости, перпендикулярной прямой, на которой установлены пары камера-тело, которая является плоскостью симметрии для плоскостей, проходящих через зоны верхних мертвых точек, и плоскостей, проходящих через зоны нижних мертвых точек (см. Фиг. 2, 3, 5-7). Элементы кривошипно-шатунного механизма такие, как зубчатые колеса, получающие вращение валы каждого набора (см. Фиг. 2, 3, 7), выполнены также симметрично относительно плоскости, перпендикулярной прямой, на которой установлены пары камера-тело, которая является плоскостью симметрии для плоскостей, проходящих через зоны верхних мертвых точек, и плоскостей, проходящих через зоны нижних мертвых точек. Зубчатые колеса, получающие вращение валы одного набора, уравновешивают зубчатые колеса, получающие вращение валы другого набора в любой момент времени работы реактора.
Как видно (см. Фиг. 5), возможны общие в отношении наборов элементы - какой-либо элемент может быть использован как в одном наборе, так и во втором. Так, элементы кривошипно-шатунного механизма такие, как ведущие зубчатые колеса, передающие вращение валы (см. Фиг. 5) являются одними и теми же в отношении разных наборов элементов кривошипно-шатунного механизма. Оба ведущих зубчатых колеса и оба передающих вала (см., например, Фиг. 5) использованы в формируемых кинематических цепях как в отношении одной пары камера-тело, так и в отношении второй пары камера-тело. Каждое ведущее зубчатое колесо и каждый передающий вал (см. Фиг. 5) симметричен относительно плоскости, перпендикулярной прямой, на которой установлены пары камера-тело, которая является плоскостью симметрии для плоскостей, проходящих через зоны верхних мертвых точек, и плоскостей, проходящих через зоны нижних мертвых точек. Элементы содержат симметричные части, которые условно можно отнести к разным наборам, и которые уравновешивают друг друга.
Другие элементы - ведомые зубчатые колеса, кривошипы, получающие вращение валы (см. Фиг. 5 и 6) не являются общими для наборов, индивидуальны для каждого набора. Выполнены в отличие от рассмотренной выше ситуации несимметричными относительно плоскости, перпендикулярной прямой, на которой установлены пары камера-тело, которая является плоскостью симметрии для плоскостей, проходящих через зоны верхних мертвых точек, и плоскостей, проходящих через зоны нижних мертвых точек, а пространственно центрально симметричными. Центр их симметрии расположен на перпендикуляре в точку, лежащую на прямой, на которой установлены пары камера-тело, и равноудаленную от камер обеих пар камера-тело, плоскостей, проходящих через зоны верхних мертвых точек, и плоскостей, проходящих через зоны нижних мертвых точек, на равном расстоянии от плоскостей ведомых зубчатых колес, кривошипов, концов получающих вращение валов, с которыми жестко связаны ведомые зубчатые колеса и кривошипы (см. Фиг. 5 и 6).
Таким образом, выполнение в двухкамерном реакторе кривошипно-шатунного механизма с шатунами растяжения 5 (см. Фиг. 5-7) обеспечивает уравновешивание, снижение шума, предотвращение возникновения вибраций. Реализация кривошипно-шатунного механизма с шатунами растяжения показана в трех нижеследующих вариантах, однако не исчерпывает всех возможностей реализации.
В первом варианте кривошипно-шатунный механизм с шатунами растяжения 5 для двухкамерного реактора реализован в составе пары передающих вращение валов 12 от внешнего источника вращающего момента, пары ведущих зубчатых колес 13, четырех пар получающих вращение валов 14, четырех кривошипов 16, четырех ведомых зубчатых колес 15, двух групп шатунов растяжения 5, содержащих по четыре шатуна растяжения 5 (см. Фиг. 5). Здесь и далее, пара передающих вращение валов, или пара ведущих зубчатых колес, или пара получающих вращение валов, то есть, пара каких-либо деталей, означает, что эти детали, являясь одинаковыми, расположены на одной и той же оси.
Пара передающих вращение валов 12 установлена на одной оси, проходящей через точку, лежащую на прямой, на которой установлены пары камера-тело, и равноудаленную от камер 1 обеих пар камера-тело, плоскостей, проходящих через зоны верхних мертвых точек, и плоскостей, проходящих через зоны нижних мертвых точек. При этом ось передающих вращение валов 12 перпендикулярна прямой, на которой установлены пары камера-тело. С концом каждого передающего вращение вала 12 жестко соединено ведущее зубчатое колесо 13, с расположением в парах плоскостей ведущих зубчатых колес 13 и, соответственно, концов передающих вращение валов 12 с зазором друг относительно друга, величина которого выбрана, с возможностью обеспечения расположения в нем пар камера-тело, а также и других конструктивных элементов реактора, в частности, камер закалки, картера 3.
Пары получающих вращение валов 14 установлены таким образом, что их оси параллельны оси пары передающих вращение валов 12, равноудалены от оси пары передающих вращение валов 12 и равноудалены относительно прямой, на которой установлены пары камера-тело. На одной и той же оси установлена пара получающих вращение валов 14. При установке пар получающих вращение валов 14 по осям между их концами выполнен зазор, с которым расположены плоскости ведущих зубчатых колес 13 и, соответственно, концы передающих вращение валов 12, с которыми жестко соединены ведущие зубчатые колеса 13. В каждой паре получающих вращение валов 14, установленных на одной и той же оси, в отношении их концов, которые расположены с зазором, выполнено жесткое соединение ведомого зубчатого колеса 15 - к концу одного получающего вращение вала 14 и выполнено жесткое соединение кривошипа 16 - к концу другого получающего вращение вала 14. При этом два ведомых зубчатых колеса 15 расположены в плоскости одного ведущего зубчатого колеса 13 с реализацией их сопряжения для зубчатой передачи. Два других ведомых зубчатых колеса 15 расположены в плоскости другого ведущего зубчатого колеса 13 с реализацией их сопряжения для зубчатой передачи. Ведомые зубчатые колеса 15 одной плоскости ведущего зубчатого колеса 13 расположены на прямой, пересекающей ось пары передающих вращение валов 12. К каждому ведомому зубчатому колесу 15, которые снабжены на их дисковой поверхности цилиндрическим выступом с осью, смещенной относительно оси вращения ведомого зубчатого колеса 15, за счет цилиндрического выступа подвижно подсоединено одним концом по шатуну растяжения 5. Второй конец шатунов растяжения 5 подвижно связан с телом 2. Кроме того, к каждому кривошипу 16, установленному неподвижно на соответствующем получающем вращение валу 14, за счет цилиндрического выступа на кривошипе подвижно подсоединено одним концом по шатуну растяжения 5, второй конец которых подвижно связан с телом 2. В каждой группе из четырех шатунов растяжения 5, связанных с телом 2, два шатуна растяжения 5 соединены с кривошипом 16 и два шатуна растяжения 5 - с ведомым зубчатым колесом 15. Одна группа шатунов растяжения 5 связана с одним телом 2, вторая группа шатунов растяжения 5 связана со вторым телом 2.
Пара передающих вращение валов 12 от внешнего источника вращающего момента, четыре пары получающих вращение валов 14 смонтированы на наружных поверхностях картера 3, пара передающих вращение валов 12 установлена в центральной части картера 3, а пары получающих вращение валов 14 - в угловых частях картера 3 (см. Фиг. 5), в которых внутри картера 3 расположены концы частей камер закалки, выходящие наружу относительно картера 3, снабженные штуцерами 7.
Во втором варианте кривошипно-шатунный механизм реализован в составе (см. Фиг. 6) двух пар передающих вращение валов 12 от внешнего источника вращающего момента, двух пар ведущих зубчатых колес 13, четырех пар получающих вращение валов 14, четырех кривошипов 16, четырех ведомых зубчатых колес 15, двух групп шатунов растяжения 5, содержащих по четыре шатуна растяжения 5.
Пары передающих вращение валов 12 установлены таким образом, что их оси равноудалены от точки, лежащей на прямой, на которой установлены пары камера-тело, и равноудаленной от камер 1 обеих пар камера-тело, плоскостей, проходящих через зоны верхних мертвых точек, и плоскостей, проходящих через зоны нижних мертвых точек. На каждой оси установлено по паре передающих вращение валов 12. Кроме того, оси пар передающих вращение валов 12 равноудалены относительно прямой, на которой установлены пары камера-тело. Оси пар передающих вращение валов 12 перпендикулярны прямой, на которой установлены пары камера-тело. С концом каждого передающего вращение вала 12 одной пары жестко соединено ведущее зубчатое колесо 13 из соответствующей пары ведущих зубчатых колес 13. Плоскости ведущих зубчатых колес 13 и концов передающих вращение валов 12, в отношении которых выполнено жесткое соединение, в парах расположены друг относительно друга с зазором. Величина зазора - одна и та же в отношении обеих пар, выбрана исходя из возможности расположения в нем пар камера-тело, других конструктивных элементов реактора, в частности, камер закалки, картера 3.
Два конца передающих вращение вала 12 и два жестко соединенных ведущих зубчатых колеса 13, лежащих в одной и той же плоскости, расположены на прямой, пересекающей перпендикуляр в точку, лежащую на прямой, на которой установлены пары камера-тело, и равноудаленную от камер 1 обеих пар камера-тело, плоскостей, проходящих через зоны верхних мертвых точек, и плоскостей, проходящих через зоны нижних мертвых точек. Другие два конца передающих вращение вала 12 и два жестко соединенных ведущих зубчатых колеса 13, лежащих в одной и той же плоскости, расположены на другой прямой, пересекающей перпендикуляр в точку, лежащую на прямой, на которой установлены пары камера-тело, и равноудаленную от камер 1 обеих пар камера-тело, плоскостей, проходящих через зоны верхних мертвых точек, и плоскостей, проходящих через зоны нижних мертвых точек.
Пары получающих вращение валов 14 установлены таким образом, что их оси параллельны осям пар передающих вращение валов 12, равноудалены от точки, лежащей на прямой, на которой установлены пары камера-тело, и равноудаленной от камер 1 обеих пар камера-тело, плоскостей, проходящих через зоны верхних мертвых точек, и плоскостей, проходящих через зоны нижних мертвых точек. Оси пар получающих вращение валов 14 равноудалены относительно прямой, на которой установлены пары камера-тело. На одной и той же оси установлена пара получающих вращение валов 14. При установке пар получающих вращение валов 14 по осям между их концами выполнен зазор, с которым расположены плоскости ведущих зубчатых колес 13 и, соответственно, концы передающих вращение валов 12, с которыми жестко соединены ведущие зубчатые колеса 13. В каждой паре получающих вращение валов 14, установленных на одной и той же оси, в отношении концов, которые расположены с зазором, выполнено жесткое соединение ведомого зубчатого колеса 15 - к концу одного получающего вращение вала 14 и выполнено жесткое соединение кривошипа 16 - к концу другого получающего вращение вала 14.
На двух прямых, каждая из которых расположена в одной из двух плоскостей, между которыми сформирован зазор, пересекающих перпендикуляр в точку, лежащую на прямой, на которой установлены пары камера-тело, и равноудаленную от камер 1 обеих пар камера-тело, плоскостей, проходящих через зоны верхних мертвых точек, и плоскостей, проходящих через зоны нижних мертвых точек, расположены по два ведомых зубчатых колеса 15, лежащих в одной и той же плоскости, жестко соединенных с концами получающих вращение валов 14. Два ведомых зубчатых колеса 15 расположены в одной плоскости двух ведущих зубчатых колес 13, причем одно ведомое зубчатое колесо 15 сопряжено для зубчатой передачи с одним ведущим колесом 13, а другое ведомое зубчатое колесо 15 сопряжено для зубчатой передачи с другим ведущим колесом 13. Два других ведомых зубчатых колеса 15 расположены в другой плоскости двух других ведущих зубчатых колес 13, причем одно ведомое зубчатое колесо 15 сопряжено для зубчатой передачи с одним ведущим колесом 13, а другое ведомое зубчатое колесо 15 сопряжено для зубчатой передачи с другим ведущим колесом 13.
К каждому ведомому зубчатому колесу 15, которые снабжены на их дисковой поверхности цилиндрическим выступом с осью, смещенной относительно оси вращения ведомого зубчатого колеса 15, за счет цилиндрического выступа подвижно подсоединено одним концом по шатуну растяжения 5, второй конец которых подвижно связан с телом 2. Кроме того, к каждому кривошипу, жестко связанному с концом получающего вращение вала 14 пары получающих вращение валов 14, за счет цилиндрического выступа на кривошипе 16 подвижно подсоединено одним концом по шатуну растяжения 5, второй конец которых подвижно связан с телом 2. В каждой группе из четырех шатунов растяжения 5 два шатуна растяжения 5 соединены с кривошипом 16 и два шатуна растяжения 5 - с ведомым зубчатым колесом 15. Одна группа шатунов растяжения 5 связана с одним телом 2, вторая группа шатунов растяжения 5 связана со вторым телом 2.
Обе пары передающих вращение валов 12 от внешнего источника вращающего момента, четыре пары получающих вращение валов 14 смонтированы относительно наружных поверхностей картера 3 с помощью пары кронштейнов, расположенных по бокам картера 3. Пары передающих вращение валов 12 установлены по бокам картера 3, а пары получающих вращение валов 14 - в угловых частях картера 3 (см. Фиг. 6), в которых внутри картера 3 расположены концы частей камер закалки, выходящие наружу относительно картера 3, снабженные штуцерами 7. Геометрическая конфигурация кронштейнов выбрана также исходя из условия достижения уравновешенности реактора и не вносит разбаланса.
В третьем варианте кривошипно-шатунный механизм реализован в составе (см. Фиг. 2, 3 и 7) четырех получающих вращение валов (осей зубчатых колес) 10 от внешнего источника вращающего момента, четырех пар зубчатых колес 6, снабженных на их дисковой поверхности цилиндрическим выступом (шипом) 11 с осью, смещенной относительно оси вращения зубчатого колеса 6, двух групп шатунов растяжения 5, содержащих по четыре шатуна растяжения 5.
Получающие вращение валы 10 от внешнего источника вращающего момента установлены таким образом, что их оси равноудалены от точки, лежащей на прямой, на которой установлены пары камера-тело, и равноудаленной от камер 1 обеих пар камера-тело, плоскостей, проходящих через зоны верхних мертвых точек, и плоскостей, проходящих через зоны нижних мертвых точек. Кроме того, оси получающих вращение валов 10 от внешнего источника вращающего момента равноудалены относительно прямой, на которой установлены пары камера-тело. Оси получающих вращение валов 10 от внешнего источника вращающего момента перпендикулярны прямой, на которой установлены пары камера-тело.
С концами каждого получающего вращение вала 10 от внешнего источника жестко соединена пара зубчатых колес 6. В отношении каждого из получающего вращение вала 10 в каждой паре зубчатых колес 6 одно зубчатое колесо 6 расположено в одной плоскости, второе зубчатое колесо 6 расположено в другой плоскости. Между двумя указанными плоскостями сформирован зазор, причем величина зазора в отношении всех пар зубчатых колес 6 - одна и та же. Зазор сформирован с возможностью расположения в нем пар камера-тело, других конструктивных элементов реактора, в частности, камер закалки, картера 3.
Все зубчатые колеса 6, расположенные в одной и той же плоскости, сопряжены между собой для зубчатой передачи. К каждому зубчатому колесу 6 за счет цилиндрического выступа (шипа) 11 подвижно подсоединено одним концом по шатуну растяжения 5, второй конец которых подвижно связан с телом 2. В каждой группе из четырех шатунов растяжения 5 два шатуна растяжения 5 соединены с двумя зубчатыми колесами 6, расположенными в одной плоскости, и два шатуна растяжения 5 - с двумя зубчатыми колесами 6, расположенными в другой плоскости. Одна группа шатунов растяжения 5 связана с одним телом 2, вторая группа шатунов растяжения связана со вторым телом 2.
Получающие вращение валы 10 от внешнего источника вращающего момента выполнены в угловых частях картера 3 (см. Фиг. 7), с возможностью сквозной установки относительно картера 3. Во внутреннем объеме картера 3 они размещены на фиксированном расстоянии относительно частей камеры закалки, концы которых, выходящие наружу относительно картера 3, снабжены штуцерами 7.
Более детальное выполнение пар камера-тело в двухкамерном реакторе выглядит следующим образом (см. Фиг. 2 и 3).
В установленных на одной и той же прямой парах камера-тело с симметричным расположением плоскостей, проходящих через зоны верхних мертвых точек, и плоскостей, проходящих через зоны нижних мертвых точек, относительно плоскости, перпендикулярной прямой, на которой установлены пары камера-тело, в каждой паре камера-тело камера 1 выполнена в виде полого цилиндра. При этом в основании цилиндра, наименее удаленном от плоскости, относительно которой симметрично расположены плоскости, проходящие через зоны верхних мертвых точек, и плоскости, проходящие через зоны нижних мертвых точек, выполнена торцевая стенка. Пары камера-тело расположены торцевыми стенками навстречу друг к другу.
В каждой паре камера-тело каждое тело 2 выполнено в виде поршня. При этом расположение в каждой камере 1 каждого тела 2 - каждого из предназначенных для сжатия смеси реагентов при их перемещении между зонами верхней и нижней мертвых точек поршней, посредством которых в отношении каждой пары камера-тело обеспечена связь кривошипно-шатунного механизма с шатунами растяжения с формированием одинаковой кинематической цепи, с возможностью синхронного поступательно-возвратного перемещения к зонам верхней мертвой точки и зонам нижней мертвой точки каждого тела 2 в каждой камере 1, реализовано со стороны каждой камеры-цилиндра, наиболее удаленной от плоскости, относительно которой симметрично расположены плоскости, проходящие через зоны верхних мертвых точек, и плоскости, проходящие через зоны нижних мертвых точек.
В парах камера-тело каждый поршень выполнен в составе образующего головку поршня днища, соединенного с юбкой. Юбка снабжена по бокам парой наружных Т-образных поршневых пальцев. Каждый из Т-образных поршневых пальцев состоит из соединенной с юбкой ножки и соединенной с ножкой своей средней частью штанги.
Каждая камера 1 - цилиндр снабжена прорезями. В прорезях ножками расположены Т-образные поршневые пальцы с выводом штанг наружу относительно камеры-цилиндра.
Концы штанг выполнены с возможностью подвижного соединения с шатунами растяжения 5.
Поверхности днища поршня и торцевой стенки цилиндра, ориентированные навстречу друг к другу, выполнены плоскопараллельными.
В центральных частях торцевых стенок, которыми пары камера-тело расположены навстречу друг другу и которые выполнены в основаниях цилиндров, наименее удаленных от плоскости, относительно которой симметрично расположены плоскости, проходящие через зоны верхних мертвых точек, и плоскости, проходящие через зоны нижних мертвых точек, выполнены расположенные между зонами верхних мертвых точек пар камера-тело каналы вывода (см. Фиг. 3 и 4). Каналы вывода выполнены с управляемыми клапанами вывода в виде выходных отверстий, которые снабжены управляемыми клапанами вывода.
В частях цилиндров, характеризующихся цилиндрической поверхностью, реализованы расположенные между зонами нижних мертвых точек пар камера-тело каналы ввода с управляемыми клапанами ввода. Каждый канал ввода реализован в составе пары снабженных управляемыми клапанами ввода входных отверстий (со штуцерами канала ввода 8 и 9, см. Фиг. 3) для подачи реагентов в рабочий объем. Отверстия с управляемыми клапанами выполнены в каждом цилиндре таким образом, что центры отверстий расположены в плоскости одного и того же поперечного сечения и с равным удалением центров отверстий относительно прямой, на которой установлены пары камера-тело.
Выполненные в парах камера-тело датчики давления в рабочих объемах и датчики вывода продукта переработки из рабочих объемов с расположением их между зонами верхних мертвых точек пар камера-тело размещены вне рабочих объемов. Датчики давления установлены на торцевых стенках. Датчики вывода продукта переработки из рабочих объемов установлены на выходных отверстиях.
В двухкамерном исполнении реактора, каждая пара камера-тело снабжена камерой закалки (см. Фиг. 3 и 4), выполнение которой также отвечает условиям уравновешенности реактора, отсутствию шума и вибраций.
Как указано выше, каждая пара камера-тело снабжена камерой закалки КЗ, выполненной симметричной относительно плоскости, перпендикулярной плоскостям, проходящим через зоны верхних мертвых точек, и плоскостям, проходящим через зоны нижних мертвых точек, и проходящей через прямую, на которой установлены пары камера-тело, сообщающейся с рабочим объемом РО через управляемый клапан канала вывода. При этом каждая камера закалки КЗ реализована в выполненном встык с парами камера-тело картере 3 (см. Фиг. 3 и 4). Каждая камера закалки КЗ выполнена составе двух трубчатообразных частей с выходящими наружу относительно картера 3 концами, снабженными штуцерами 7. Трубчатообразные части - одинаковы, симметрично расположены относительно плоскости, перпендикулярной плоскостям, проходящим через зоны верхних мертвых точек, и плоскостям, проходящим через зоны нижних мертвых точек, и проходящей через прямую, на которой установлены пары камера-тело, являющейся плоскостью симметрии камеры закалки. В картере 3 трубчатообразные части соединены переходником, выполненным симметричным относительно плоскости симметрии камеры закалки КЗ. Управляемый клапан канала вывода выполнен в виде золотникового газораспределительного механизма, который установлен в переходнике. Кроме того, каждая камера закалки выполнена с возможностью заполнения ее холодным инертным газом или содержания ее в состоянии холодного вакуума с заданием в ней требуемого давления.
Картер 3 играет роль корпуса, объединяющего реактор в единое целое. Если реактор выполняется небольшим объемом, с рабочим объемом, например, 0,1 л, картер 3 представляет собой одну литую деталь. В реакторе большего рабочего объема, например, более 0,6 л картер 3 представляет собой сборную конструкцию. Следует заметить, что возможна реализация реактора и без картера 3.
Как однокамерный реактор, так и двухкамерный реактор, характеризуются следующими особенностями выполнения.
В паре камера-тело поверхности камеры и тела, перемещаемые друг относительно друга, снабжены покрытием, полученным микродуговым или термоэлектрохимическим оксидированием, тело относительно камеры расположено с зазором, обеспечивающим отсутствие влияния перепускания смеси реагентов на процесс переработки. Приведенная особенность выполнения преследует цель предотвращения загрязнения объема реакционной камеры, источником которого является сам реактор, а также предотвращения быстрого износа пары камера-тело. В известных решениях реализация пары камера-тело подразумевает применение традиционных поршневых уплотнительных колец и традиционных, на масляной основе, смазочных материалов, чем обеспечивается загрязнение объема реакционной камеры, возникновение паразитных реакций, износ конструкции и невысокие сроки эксплуатации. Поверхности камеры и тела, перемещаемые друг относительно друга, нуждаются в смазке для снижения трения и для обеспечения отвода тепла. В предлагаемом реакторе коэффициент трения между поверхностями камеры и тела с указанным покрытием, перемещаемыми друг относительно друга, составляет не более 5×10-2, что позволяет исключить применение масел для смазки. Покрытие обладает способностью выдерживать термоциклирование, характеризуется повышенной термо- и износостойкостью. Покрытие выдерживает температуру при протекании химической реакции переработки более 2000 К. Тело и камеру с перемещаемыми поверхностями, снабженными указанным покрытием, располагают друг относительно друга с зазором, обеспечивающим отсутствие влияния перепускания смеси реагентов на процесс переработки. В результате устраняется необходимость использования уплотнительных колец, которые подвержены износу, не гарантируют отсутствие перепускания реагентов. В качестве смазки поверхностей с указанным покрытием может использоваться воздух в зазоре. Он же является хладагентом. Также, в частных случаях, может быть использована для смазки вода, водяной пар, как смазки, улучшающие теплоотвод.
В реакторе в отношении пары камера-тело выполнено приспособление подачи смазки и хладагента в зазор, с которым расположено тело относительно камеры, кроме того, тело выполнено с возможностью дополнительного охлаждения. Приспособление подачи смазки и хладагента в зазор, реализовано в виде трубок для подачи воздуха, выполняющего функцию смазки и хладагента, или воды, выполняющей функцию смазки и хладагента. Кроме того, тело может быть выполнено с возможностью дополнительного охлаждения посредством сформированных в нем каналов для пропускания по ним хладагента - воды или воздуха.
Зазор между указанными поверхностями с указанным покрытием, обеспечивающий отсутствие влияния перепускания смеси реагентов на процесс переработки, по величине равен от 5 до 20 мкм, включая указанные значения интервала.
Цилиндр выполнен круглым, соответственно, поршень выполнен с круглым днищем. Юбка выполнена цилиндрообразной. Соединение днища с юбкой выполнено с одного торца цилиндрообразной юбки. Юбка снабжена по бокам парой наружных Т-образных поршневых пальцев со второго торца цилиндрообразной юбки. Т-образные поршневые пальцы расположены диаметрально противоположно друг относительно друга. Соответственно, прорези цилиндра, в которых ножками расположены Т-образные поршневые пальцы, выполнены вдоль образующей цилиндра диаметрально противоположными.
Приведенное выполнение цилиндра и поршня не исключает возможность использования при их выполнении другой геометрической конфигурации. Например, эллиптический цилиндр с формой основания в виде эллипса, или цилиндр в виде призмы, в котором основание представляет собой многоугольник. Соответственно, в этих случаях поршень выполняется с эллиптическим днищем или с днищем в виде многоугольника.
Датчик вывода продукта переработки выполнен в виде термопары. Термопара или термоэлектрический преобразователь широко применяема в промышленности, научных исследованиях, медицине, в системах автоматики в основном, для измерения температуры. В данном случае она используется в качестве датчика. По изменению температуры на выходном отверстии, которая может существенно отличаться в зависимости от того, осуществляется ли вывод продукта, или же он не происходит, судят о том, закончен ли вывод продукта переработки или он продолжается.
Датчик давления выполнен в виде тензодатчика веса. Например, на основе тензодатчика веса - цифрового датчика (RS-485). Принцип работы датчика давления основан на изменении сопротивления проводника при механическом воздействии на него. В наиболее простом варианте реализации датчик представляет собой мелкоячеистую проводниковую сетку, закрепленную на токопроводящую основу - металлическую фольгу.
В качестве управляемого клапана ввода выполнен электромагнитный клапан. Электромагнитный клапан обычно используют для регулирования потоков всех типов, в том числе и потоков газов. В составе клапана выполнен корпус, соленоид (электромагнитная катушка) с сердечником, с последним связан диск или поршень, регулирующий поток. На электромагнитную катушку подают электрическое напряжение, в результате чего магнитный сердечник втягивается в соленоид, что приводит к открытию либо закрытию клапана. Приведенная конструкция клапана применяется как в сложных технологических процессах, так и в быту. Посредством клапана дистанционно возможно осуществить подачу необходимого объема реагентов в требуемый момент времени.
В качестве управляемого клапана вывода выполнен электромеханический, или механический клапан. В частности, управляемый клапан вывода выполняют в виде газораспределительного механизма, золотникового. Конструкция управляемого клапана вывода подробно приведена ниже.
Управляемый клапан вывода выполнен в виде золотникового газораспределительного механизма (см. Фиг. 3 и 4) в составе вращающегося золотника 4 и связанного с ним вала. Ось вращения вала расположена в плоскости симметрии камеры закалки КЗ. Вращающийся золотник 4 выполнен с геометрической конфигурацией, соответствующей телу вращения с осью вращения, совпадающей с осью вращения вала. Внутри золотника 4 сформирована полость с входным отверстием с осью, совпадающей с осью вращения вала. Золотник 4 снабжен, по крайней мере, одним боковым относительно оси вращения сквозным фигурным окном В. Фигурное окно В характеризуется геометрией, обеспечивающей образование при пересечении контура окна множеством плоскостей, проходящих через ось вращения вала, множества отрезков с индивидуальной длиной. Геометрическая конфигурация и размеры золотника 4 заданы исходя из условия возможности расположения фигуры поперечного сечения трубчатообразной части, выбранного в области соединения ее с переходником, во внутренней области фигуры сечения золотника 4, получаемого в плоскости, в которой расположена ось вращения.
При установке золотникового газораспределительного механизма в переходнике, золотник 4 установлен в переходнике между частями трубчатообразной камеры закалки. Вал - в плоскости симметрии камеры закалки КЗ. При этом вращающийся золотник 4 со стороны входа в его полость установлен с примыканием входным отверстием полости к поверхности камеры 1 с охватом канала вывода целиком входным отверстием полости. Либо вращающийся золотник 4 со стороны входа в его полость установлен в канал вывода (как показано на Фиг. 4) с примыканием золотника 4 к поверхности канала вывода. Как в одном случае, так и в другом случае, установка произведена с возможностью образования между камерой 1 и золотником 4 скользящего равномерно плотного контакта при вращении золотника 4. Золотник 4 своей частью, в которой выполнено, по крайней мере, одно боковое сквозное фигурное окно В, установлен с примыканием к переходнику. Установка выполняется с возможностью образования между переходником и золотником 4 скользящего равномерно плотного контакта при вращении золотника 4 и реализацией сообщения полости золотника 4 с объемом каждой из частей трубчатообразной камеры закалки КЗ посредством фигурного окна В.
Вращающийся золотник 4 выполнен с геометрической конфигурацией, соответствующей телу вращения, а именно, конусу, или цилиндру (как на Фиг. 3 и 4), или шару.
В золотнике 4, снабженном, по крайней мере, одним боковым сквозным фигурным окном В, характеризующимся геометрией, обеспечивающей образование при пересечении контура окна множеством плоскостей, проходящих через ось вращения вала, множества отрезков с индивидуальной длиной, окно сформировано в форме полукруга, или четверти круга, или треугольника.
Вал, с которым связан золотник 4, соединен с дополнительным внешним источником вращающего момента. Вал через указанный источник связан с программно-аппаратным комплексом. В качестве дополнительного внешнего источника вращающего момента использован дополнительный электродвигатель.
В реакторе программно-аппаратный комплекс, с которым связаны управляемые клапаны, датчик давления, датчик вывода продукта переработки, кривошипно-шатунный механизм с шатунами растяжения выполнен на базе компьютера и связанного с ним контроллера. Осуществляет подачу управляющих команд к управляемым клапанам каналов ввода и вывода, кривошипно-шатунному механизму с шатунами растяжения и передачу данных от датчика давления, датчика вывода продукта переработки. Управляемый клапан канала вывода связан с контроллером программно-аппаратного комплекса через датчик вывода продуктов.
Кривошипно-шатунный механизм с шатунами растяжения связан с контроллером через вал внешнего источника вращающего момента. В качестве внешнего источника вращающего момента использован электродвигатель.
В качестве контроллера использован контроллер с программируемой логикой, программируемый контроллер - электронная составляющая компьютеризированного какого-либо устройства (установки), применяемого с целью автоматизации технологического процесса. Контроллер с программируемой логикой относится к устройствам реального времени. Ориентирован на работу с устройствами через развитый ввод сигналов датчиков и вывод сигналов на исполнительные механизмы. Производится как самостоятельное изделие, отдельное от управляемого при его помощи оборудования.
В реакторе канал ввода, реализованный в составе пары снабженных управляемыми клапанами ввода входных отверстий для подачи реагентов в рабочий объем, соединен со средствами подачи реагентов. Одно входное отверстие (см. Фиг. 2 и 3, 8 - штуцер канала ввода, на фигурах средства подачи реагентов не показаны) выполнено для подачи основного реагента, содержащего перерабатываемое вещество, и соединено с узлом подготовки и подачи основного реагента посредством управляемого клапана ввода. Управляемый клапан ввода, связанный с программно-аппаратным комплексом, обеспечивает требуемую дозировку его поступления в рабочий объем. Второе входное отверстие (9 - штуцер канала ввода) выполнено для подачи вспомогательного реагента, содержащего вспомогательное вещество, и соединено с узлом подготовки и подачи вспомогательного реагента. Узел подготовки и подачи вспомогательного реагента выполнен в составе воздухонагнетателя, регулятора температуры воздуха, эжекторного смесителя, теплообменника. При этом воздухонагнетатель через регулятор температуры воздуха соединен с эжекторным смесителем с возможностью подачи в него нагнетаемого воздуха после коррекции температуры для смешивания с подаваемыми в эжекторный смеситель необходимыми для протекания реакции переработки вспомогательными веществами. Эжекторный смеситель соединен с теплообменником с возможностью подачи в последний воздуха, смешанного со вспомогательными веществами, для последующей температурной коррекции. Теплообменник связан со вторым отверстием (9 - штуцер канала ввода) для подачи вспомогательного реагента посредством связанного с программно-аппаратным комплексом управляемого клапана ввода, обеспечивающего требуемую дозировку его поступления в рабочий объем.
Химический реактор сжатия работает следующим образом. Для примера рассмотрим переработку метана в режиме двигателя.
В средствах подачи реагентов осуществляют подготовку вспомогательного реагента, содержащего вспомогательное вещество. Для этого используют узел подготовки и подачи вспомогательного реагента. Требуемое количество воздуха подают через воздухонагнетатель в регулятор температуры воздуха, посредством которого корректируют температуру воздуха. Затем указанный воздух подают в эжекторный смеситель, в котором воздух смешивают с кислородом. Из эжекторного смесителя воздух, смешанный с кислородом, подают в теплообменник для последующей температурной коррекции. В средствах подачи реагентов, а именно, в узле подготовки и подачи основного реагента параллельно подготавливают основной реагент, содержащий перерабатываемое вещество - метан. Затем посредством входных отверстий (см. Фиг. 2 и 3), снабженных штуцерами канала ввода 8, предназначенных для соединения входных отверстий каналов ввода с узлом подготовки и подачи основного реагента, основной реагент, содержащий перерабатываемое вещество, - метан подают в рабочие объемы пар камера-тело. Посредством управляемых клапанов ввода, связанных с программно-аппаратным комплексом, обеспечивают требуемую дозировку его поступления в рабочие объемы. Параллельно посредством входных отверстий (см. Фиг. 2 и 3), снабженных штуцерами канала ввода 9, предназначенных для соединения входных отверстий каналов ввода с узлом подготовки и подачи вспомогательного реагента, вспомогательный реагент, содержащий вспомогательное вещество, - кислород подают в рабочие объемы пар камера-тело. Посредством управляемых клапанов ввода, связанных с программно-аппаратным комплексом, обеспечивают требуемую дозировку его поступления в рабочие объемы.
В режиме двигателя подаваемые реагенты дозируют с учетом подбора состава смеси реагентов близким к стехиометрическому.
При подаче реагентов тела 2 в рабочих объемах пар камера-тело находятся в зонах нижних мертвых точек. По окончанию подачи смеси реагентов в рабочие объемы, тела 2 в камерах 1 начинают синхронно совершать движение в зоны верхних мертвых точек за счет кривошипно-шатунного механизма с шатунами растяжения, которыми он связан с формированием одинаковой кинематической цепи с каждой парой камера-тело, а именно, с телами 2, приводя их в движение. Тела 2 совершают перемещение в зоны верхних мертвых точек, уменьшая величину рабочего объема в каждой камере 1, сжимая смесь, до достижения давления и температуры в каждой камере 1, соответствующих запуску реакции переработки. Датчики давления, расположенные вне рабочего объема на торцевых стенках каждой камеры 1, измеряют давление в реальном времени. Данные поступают в программно-аппаратный комплекс, управляющий работой реактора. В реакторе обеспечены возможности регулировки положения зон верхней мертвой точки камер 1 со временем реагирования около 0,1 сек и точностью около 10 мкм, подачи смеси реагентов в рабочие объемы камер 1 с минимальным временем срабатывания около 0,5 сек. Реактор работает в диапазоне оптимальных частот до 10 Гц.
Контроль давления в рабочих объемах предоставляет информацию о протекании в них процесса.
С учетом расчетной кривой окисления смесь реагентов в рабочих объемах пар камера-тело 2 сжимают посредством перемещающегося тела до давления около 90 атм. Осуществляют запуск реакции. Далее давление поддерживают на уровне 90 атм. до достижения телами 2 зон верхних мертвых точек в камерах 1. Необходимая величина давления регулируется и поддерживается с помощью программно-аппаратного комплекса. Он управляет работой клапанов в каналах вывода, каждый из которых выполнен в виде золотникового газораспределительного механизма. Приводя во вращательное движение золотник 4 с фигурным окном В (см. Фиг. 4), отпирает или запирает канал вывода, устанавливает в зависимости от углового положения золотника 4 с фигурным окном В требуемую величину проходного сечения сообщения рабочего объема РО камеры 1 с камерой закалки КЗ, в которую поступает продукт переработки по мере его получения, «подключает» к управлению давлением в рабочих объемах РО эффект дросселирования камеры закалки КЗ. Клапан вывода в виде золотникового газораспредительного механизма под управлением программно-аппаратного комплекса распределяет продукт переработки в части трубчатообразной камеры закалки КЗ в равных объемах. По достижению зон верхних мертвых точек телами 2 в камерах 1, продукт переработки выводится в камеры закалки КЗ. Информацию о выводе продукта предоставляют датчики вывода продукта переработки из рабочих объемов, расположенные на выходных отверстиях каналов вывода. Золотник 4 по управляющей команде программно-аппаратного комплекса запирает каналы вывода по мере вывода требуемого объема продукта переработки - в полном объеме вывода или частичном. Тела 2 в камерах 1 совершают перемещение в зоны нижних мертвых точек. По достижению ими зон нижних мертвых точек управляемые клапаны ввода по команде аппаратно-программного комплекса отпирают каналы ввода и в рабочие объемы пар камера-тело поступает новая порция смеси реагентов с перерабатываемым веществом. Реактор осуществляет следующий цикл переработки.
Поступивший в камеру закалки КЗ продукт переработки охлаждается. Камера закалки заполнена холодным инертным газом или содержится под холодным вакуумом. Далее, посредством выходящих наружу относительно картера 3 концов каждой из частей трубчатообразной камеры закалки, снабженных штуцерами 7 (см. Фиг. 3 и 4), полученный продукт отгружают в приемник продукта переработки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Химический динамический реактор сжатия | 2023 |
|
RU2824548C1 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2011 |
|
RU2516040C2 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2012 |
|
RU2525995C2 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ ЛЕОНТЬЕВА А.А. | 2001 |
|
RU2200858C2 |
| КРИВОШИПНО-ШАТУННЫЙ МЕХАНИЗМ СО СДВОЕННЫМИ КИНЕМАТИЧЕСКИМИ СВЯЗЯМИ (ВАРИАНТЫ) | 2008 |
|
RU2382891C2 |
| Роторная машина силовой установки с внешним подводом теплоты (варианты) | 2019 |
|
RU2731466C1 |
| ОДНОЦИЛИНДРОВЫЙ МНОГОПОРШНЕВОЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ (ТОР БЛАТОВА) | 2008 |
|
RU2393361C2 |
| Двигатель внутреннего сгорания "НОРМАС" N 15 беспилотника | 2021 |
|
RU2781735C1 |
| СПОСОБ ПОЛУЧЕНИЯ МЕХАНИЧЕСКОЙ ЭНЕРГИИ ОТ СРАБАТЫВАНИЯ ДАВЛЕНИЯ ГАЗА И ПОРШНЕВОЙ ДЕТАНДЕР ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2023 |
|
RU2814992C1 |
| МАШИНА ПО ЦИКЛУ СТИРЛИНГА | 1994 |
|
RU2117802C1 |
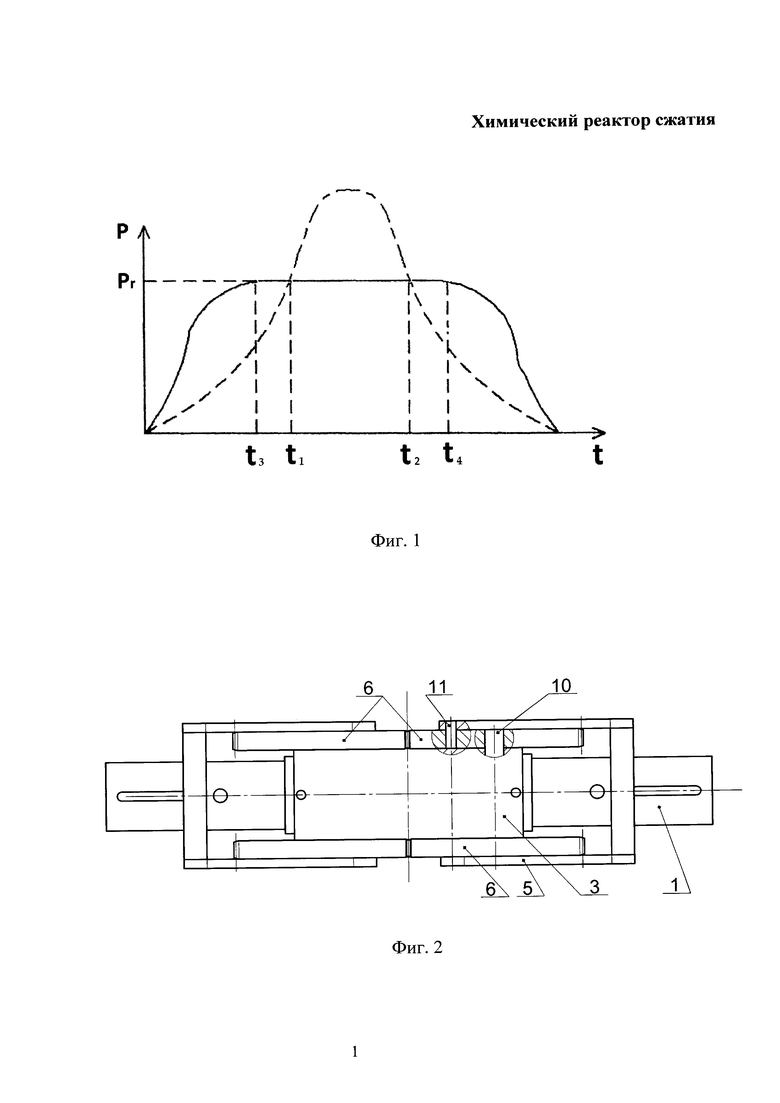
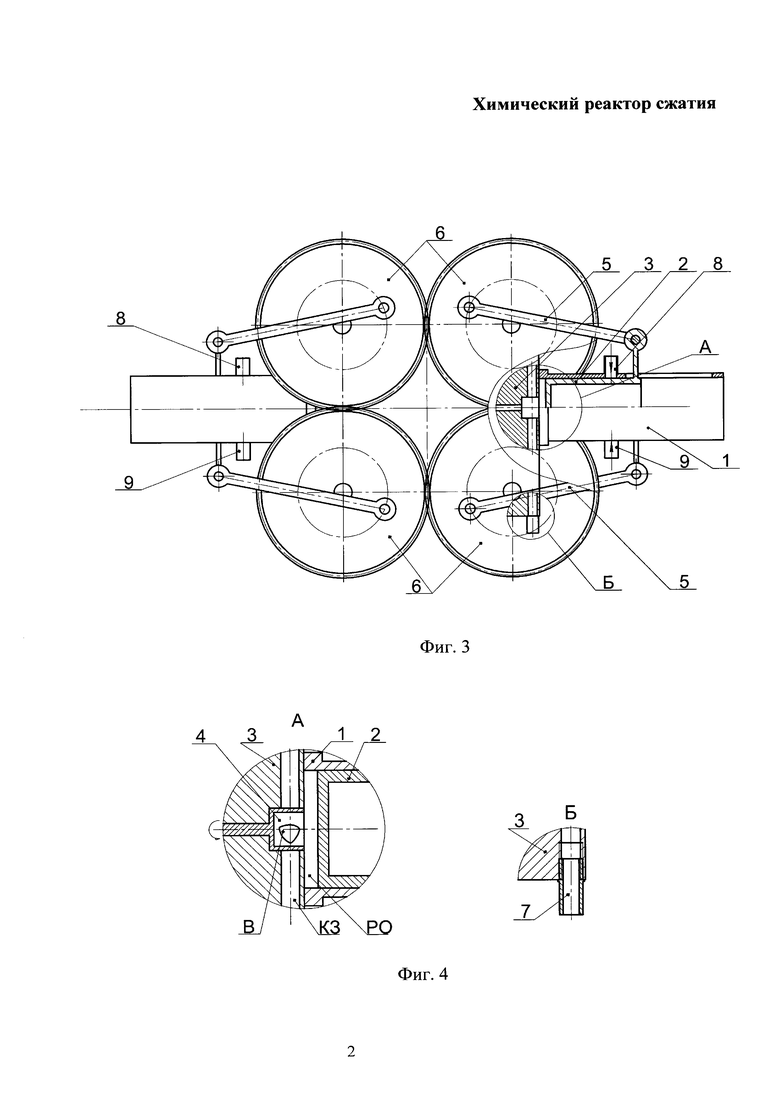
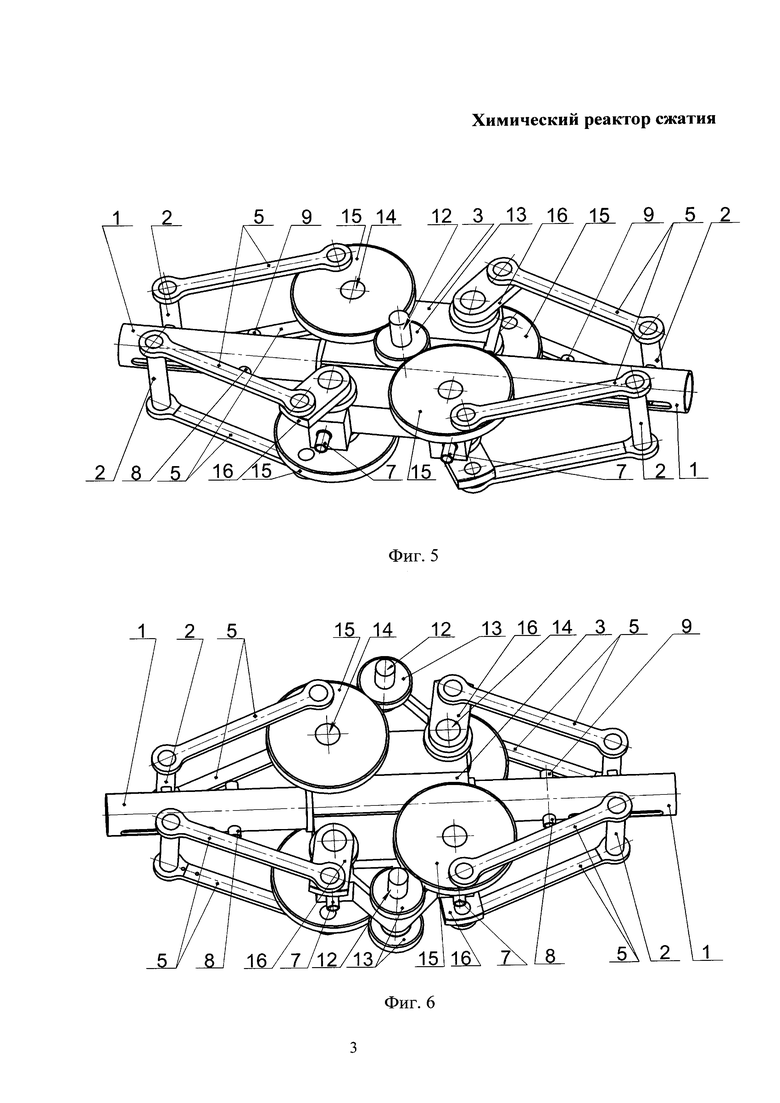
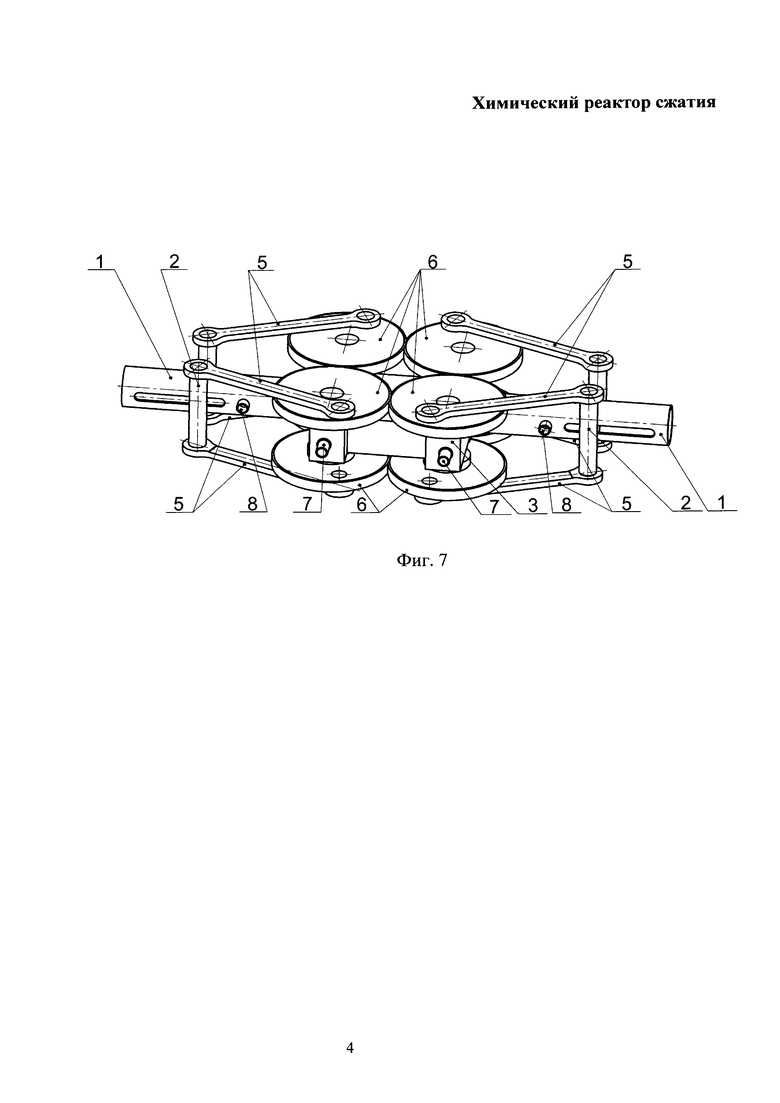
Изобретение относится к химическому машиностроению в области переработки углеводородного сырья и может быть использовано в производстве для получения синтез-газа, синтетической нефти, топлива для двигателей внутреннего сгорания. Химический реактор сжатия содержит кривошипно-шатунный механизм, пару камера-тело, представляющую собой реакционную камеру и расположенное в ней тело для сжатия смеси реагентов при его перемещении между зонами верхней и нижней мертвых точек, отграничивающее при нахождении его в зоне нижней мертвой точки рабочий объем в камере, канал ввода реагентов в рабочий объем и канал вывода продукта переработки из рабочего объема. Кривошипно-шатунный механизм выполнен с шатунами растяжения, которыми связан с парой камера-тело, с возможностью возвратно-поступательного перемещения к зонам верхней мертвой точки и зонам нижней мертвой точки тела в камере. В паре камера-тело выполнены датчики давления в рабочем объеме и датчики вывода продукта переработки из рабочего объема. Канал ввода пары камера-тело выполнен с возможностью сообщения с рабочим объемом при нахождении тела в зоне нижней мертвой точки. Канал вывода пары камера-тело выполнен с возможностью сообщения с частью рабочего объема, равной величине рабочего объема за вычетом объема, расположенного между зонами верхней и нижней мертвых точек. В каналах ввода и вывода установлены управляемые клапаны, соответственно, ввода и вывода. Пара камера-тело снабжена камерой закалки, выполненной с возможностью сообщения с рабочим объемом через управляемый клапан канала вывода. Для управления работой реактора выполнен программно-аппаратный комплекс, с которым связаны управляемые клапаны, датчик давления, датчик вывода продукта переработки и кривошипно-шатунный механизм с шатунами растяжения. Изобретение обеспечивает непрерывность протекания реакции переработки при сжатии, возможность регулирования положения зоны верхней мертвой точки, повышение чистоты продукта переработки, повышение экологичности процесса переработки и снижение энергозатрат на переработку. 21 з.п. ф-лы, 7 ил.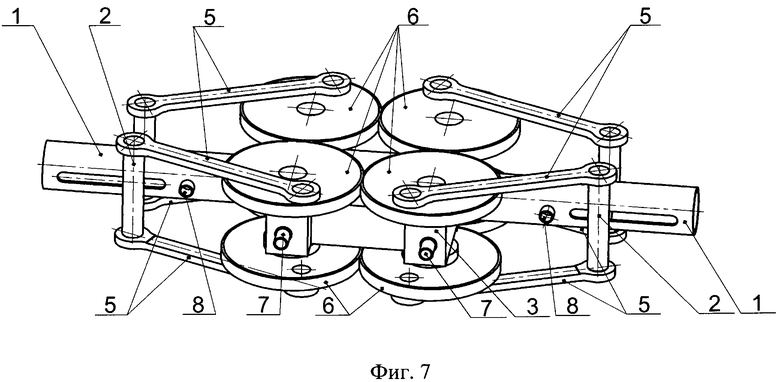
1. Химический реактор сжатия, содержащий кривошипно-шатунный механизм, связанную с кривошипно-шатунным механизмом пару камера-тело - реакционную камеру и расположенное в ней тело для сжатия смеси реагентов при его перемещении между зонами верхней и нижней мертвых точек, отграничивающее при нахождении его в зоне нижней мертвой точки рабочий объем в камере, канал ввода реагентов в рабочий объем и канал вывода продукта переработки из рабочего объема, отличающийся тем, что кривошипно-шатунный механизм выполнен с шатунами растяжения, которыми связан с парой камера-тело, с возможностью возвратно-поступательного перемещения к зонам верхней мертвой точки и зонам нижней мертвой точки тела в камере, в паре камера-тело выполнены датчики давления в рабочем объеме и датчики вывода продукта переработки из рабочего объема, канал ввода пары камера-тело выполнен с возможностью сообщения с рабочим объемом при нахождении тела в зоне нижней мертвой точки, канал вывода пары камера-тело выполнен с возможностью сообщения с частью рабочего объема, равной величине рабочего объема за вычетом объема, расположенного между зонами верхней и нижней мертвых точек, в каналах ввода и вывода установлены управляемые клапаны соответственно ввода и вывода, пара камера-тело снабжена камерой закалки, выполненной с возможностью сообщения с рабочим объемом через управляемый клапан канала вывода, для управления работой реактора выполнен программно-аппаратный комплекс, с которым связаны управляемые клапаны, датчик давления, датчик вывода продукта переработки, кривошипно-шатунный механизм с шатунами растяжения.
2. Реактор по п. 1, отличающийся тем, что в реакторе выполнена дополнительная такая же пара камера-тело, обе пары камера-тело установлены на одной и той же прямой с симметричным расположением плоскостей, проходящих через зоны верхних мертвых точек, и плоскостей, проходящих через зоны нижних мертвых точек, относительно плоскости, перпендикулярной прямой, на которой установлены пары камера-тело, кривошипно-шатунный механизм шатунами растяжения связан с каждой парой камера-тело с формированием одинаковой кинематической цепи, с возможностью синхронного возвратно-поступательного перемещения к зонам верхней мертвой точки и зонам нижней мертвой точки каждого тела в каждой камере, в обеих парах камера-тело выполнены датчики давления в рабочих объемах и датчики вывода продукта переработки из рабочих объемов с расположением их между зонами верхних мертвых точек пар камера-тело, каналы ввода пар камера-тело, каждый из которых выполнен с возможностью сообщения с рабочим объемом при нахождении каждого тела в зоне нижней мертвой точки, расположены между зонами нижних мертвых точек пар камера-тело, каналы вывода пар камера-тело, каждый из которых выполнен с возможностью сообщения с частью рабочего объема, равной величине рабочего объема за вычетом объема, расположенного между зонами верхней и нижней мертвых точек, расположены между зонами верхних мертвых точек пар камера-тело, в обоих каналах ввода и обоих каналах вывода установлены управляемые клапаны соответственно, ввода и вывода, каждая пара камера-тело снабжена камерой закалки, выполненной с возможностью сообщения с рабочим объемом через управляемый клапан канала вывода, каждая камера закалки выполнена симметричной относительно плоскости, перпендикулярной плоскостям, проходящим через зоны верхних мертвых точек и зоны нижних мертвых точек, и проходящей через прямую, на которой установлены пары камера-тело, программно-аппаратный комплекс связан с управляемыми клапанами, датчиками давления, датчиками вывода продукта переработки обеих пар камера-тело.
3. Реактор по п. 1, отличающийся тем, что в паре камера-тело поверхности камеры и тела, перемещаемые относительно друг друга, снабжены покрытием, полученным микродуговым или термоэлектрохимическим оксидированием, тело относительно камеры расположено с зазором, обеспечивающим отсутствие влияния перепускания смеси реагентов на процесс переработки.
4. Реактор по п. 3, отличающийся тем, что дополнительно снабжен приспособлением подачи смазки и хладагента в зазор, с которым расположено тело относительно камеры, кроме того, тело выполнено с возможностью дополнительного охлаждения.
5. Реактор по п. 4, отличающийся тем, что приспособление подачи смазки и хладагента в зазор реализовано в виде трубок для подачи воздуха, выполняющего функцию смазки и хладагента, или воды, выполняющей функцию смазки и хладагента.
6. Реактор по п. 4, отличающийся тем, что тело выполнено с возможностью дополнительного охлаждения посредством сформированных в нем каналов для пропускания по ним хладагента - воды или воздуха.
7. Реактор по п. 3, отличающийся тем, что зазор между указанными поверхностями с указанным покрытием, обеспечивающий отсутствие влияния перепускания смеси реагентов на процесс переработки, по величине равен от 5 до 20 мкм, включая указанные значения интервала.
8. Реактор по п. 1, отличающийся тем, что в паре камера-тело камера выполнена в виде полого цилиндра, в одном основании цилиндра выполнена торцевая стенка, в паре камера-тело тело выполнено в виде поршня, расположение в камере тела, предназначенного для сжатия смеси реагентов при перемещении между зонами верхней и нижней мертвых точек поршня, посредством которого в отношении пары камера-тело обеспечена связь кривошипно-шатунного механизма с шатунами растяжения, реализовано со стороны другого основания цилиндра, поршень выполнен в составе образующего головку поршня днища, соединенного с юбкой, которая снабжена по бокам парой наружных Т-образных поршневых пальцев, состоящих из соединенной с юбкой ножки и соединенной с ножкой своей средней частью штанги, при этом камера-цилиндр снабжена прорезями, в которых ножками расположены Т-образные поршневые пальцы с выводом штанг наружу относительно камеры-цилиндра, концы штанг выполнены с возможностью подвижного соединения с шатунами растяжения, поверхности днища поршня и торцевой стенки, ориентированные навстречу друг к другу, выполнены плоскопараллельными.
9. Реактор по п. 2, отличающийся тем, что в установленных на одной и той же прямой парах камера-тело с симметричным расположением плоскостей, проходящих через зоны верхних мертвых точек, и плоскостей, проходящих через зоны нижних мертвых точек, относительно плоскости, перпендикулярной прямой, на которой установлены пары камера-тело, в каждой паре камера-тело камера выполнена в виде полого цилиндра, при этом в основании цилиндра, наименее удаленном от плоскости, относительно которой симметрично расположены плоскости, проходящие через зоны верхних мертвых точек, и плоскости, проходящие через зоны нижних мертвых точек, выполнена торцевая стенка, пары камера-тело расположены торцевыми стенками навстречу друг к другу, в каждой паре камера-тело каждое тело выполнено в виде поршня, при этом расположение в каждой камере каждого тела - каждого из предназначенных для сжатия смеси реагентов при их перемещении между зонами верхней и нижней мертвых точек поршней, посредством которых в отношении каждой пары камера-тело обеспечена связь кривошипно-шатунного механизма с шатунами растяжения с формированием одинаковой кинематической цепи, с возможностью синхронного поступательно-возвратного перемещения к зонам верхней мертвой точки и зонам нижней мертвой точки каждого тела в каждой камере, реализовано со стороны каждой камеры-цилиндра, наиболее удаленной от плоскости, относительно которой симметрично расположены плоскости, проходящие через зоны верхних мертвых точек, и плоскости, проходящие через зоны нижних мертвых точек, в парах камера-тело каждый поршень выполнен в составе образующего головку поршня днища, соединенного с юбкой, которая снабжена по бокам парой наружных Т-образных поршневых пальцев, состоящих из соединенной с юбкой ножки и соединенной с ножкой своей средней частью штанги, при этом каждая камера-цилиндр снабжена прорезями, в которых ножками расположены Т-образные поршневые пальцы с выводом штанг наружу относительно камеры-цилиндра, концы штанг выполнены с возможностью подвижного соединения с шатунами растяжения, поверхности днища поршня и торцевой стенки, ориентированные навстречу друг к другу, выполнены плоскопараллельными.
10. Реактор по п. 8 или 9, отличающийся тем, что цилиндр выполнен круглым, соответственно поршень выполнен с круглым днищем, юбка выполнена цилиндрообразной, соединение днища с юбкой выполнено с одного торца цилиндрообразной юбки, юбка снабжена по бокам парой наружных Т-образных поршневых пальцев со второго торца цилиндрообразной юбки, которые расположены диаметрально противоположно относительно друг друга, соответственно прорези цилиндра, в которых ножками расположены Т-образные поршневые пальцы, выполнены вдоль образующей цилиндра диаметрально противоположными.
11. Реактор по п. 8, отличающийся тем, что в центральной части торцевой стенки выполнен канал вывода с управляемым клапаном вывода в виде выходного отверстия, которое снабжено управляемым клапаном вывода, в части цилиндра, характеризующейся цилиндрической поверхностью, реализован канал ввода с управляемым клапаном ввода, канал ввода выполнен в составе пары снабженных управляемыми клапанами ввода входных отверстий для подачи реагентов в рабочий объем, отверстия с управляемыми клапанами выполнены в цилиндре таким образом, что центры отверстий расположены в плоскости одного и того же поперечного сечения и с равным удалением центров отверстий относительно прямой, вдоль которой установлена пара камера-тело, выполненные в паре камера-тело датчик давления в рабочем объеме и датчик вывода продукта переработки из рабочего объема размещены вне рабочих объемов, датчик давления установлен на торцевой стенке, а датчик вывода продукта переработки из рабочего объема установлен на выходном отверстии.
12. Реактор по п. 9, отличающийся тем, что в центральных частях торцевых стенок, которыми пары камера-тело расположены навстречу друг другу и которые выполнены в основаниях цилиндров, наименее удаленных от плоскости, относительно которой симметрично расположены плоскости, проходящие через зоны верхних мертвых точек, и плоскости, проходящие через зоны нижних мертвых точек, выполнены расположенные между зонами верхних мертвых точек пар камера-тело каналы вывода с управляемыми клапанами вывода в виде выходных отверстий, которые снабжены управляемыми клапанами вывода, в частях цилиндров, характеризующихся цилиндрической поверхностью, реализованы расположенные между зонами нижних мертвых точек пар камера-тело каналы ввода с управляемыми клапанами ввода, каждый канал ввода реализован в составе пары снабженных управляемыми клапанами ввода входных отверстий для подачи реагентов в рабочий объем, отверстия с управляемыми клапанами выполнены в каждом цилиндре таким образом, что центры отверстий расположены в плоскости одного и того же поперечного сечения и с равным удалением центров отверстий относительно прямой, на которой установлены пары камера-тело, выполненные в парах камера-тело датчики давления в рабочих объемах и датчики вывода продукта переработки из рабочих объемов с расположением их между зонами верхних мертвых точек пар камера-тело размещены вне рабочих объемов, датчики давления установлены на торцевых стенках, а датчики вывода продукта переработки из рабочих объемов установлены на выходных отверстиях.
13. Реактор по п. 11 или 12, отличающийся тем, что в качестве управляемого клапана вывода выполнен электромеханический или механический клапан, а в качестве управляемого клапана ввода выполнен электромагнитный клапан, датчик вывода продукта переработки выполнен в виде термопары, а датчик давления выполнен в виде тензодатчика веса.
14. Реактор по п. 1, отличающийся тем, что программно-аппаратный комплекс, с которым связаны управляемые клапаны, датчик давления, датчик вывода продукта переработки, кривошипно-шатунный механизм с шатунами растяжения выполнен на базе компьютера, связанного с контроллером, с осуществлением подачи управляющих команд к управляемым клапанам каналов ввода и вывода, кривошипно-шатунному механизму с шатунами растяжения и передачи данных от датчика давления, датчика вывода продукта переработки посредством контроллера, управляемый клапан канала вывода связан с контроллером программно-аппаратного комплекса через датчик вывода продуктов, кривошипно-шатунный механизм с шатунами растяжения связан с контроллером через вал внешнего источника вращающего момента.
15. Реактор по п. 14, отличающийся тем, что внешний источник вращающего момента выполнен в виде электродвигателя.
16. Реактор по п. 1, отличающийся тем, что камера закалки, которой снабжена пара камера-тело, выполненная с возможностью сообщения с рабочим объемом через управляемый клапан канала вывода, реализована в составе двух трубчатообразных одинаковых симметрично расположенных относительно плоскости, проходящей через прямую, вдоль которой установлена пара камера-тело, причем такой плоскости, в которой расположен перпендикуляр к прямой, вдоль которой установлена пара камера-тело, являющейся плоскостью симметрии камеры закалки, частей с выходящими концами, снабженными штуцерами, трубчатообразные части соединены переходником, выполненным симметричным относительно плоскости симметрии камеры закалки, а управляемый клапан канала вывода выполнен в виде золотникового газораспределительного механизма, который установлен в переходнике, кроме того, камера закалки выполнена с возможностью заполнения ее холодным инертным газом или содержания ее в состоянии холодного вакуума с заданием в ней требуемого давления.
17. Реактор по п. 16, отличающийся тем, что управляемый клапан вывода выполнен в виде золотникового газораспределительного механизма в составе вращающегося золотника и связанного с ним вала, ось вращения которого расположена в плоскости симметрии камеры закалки, вращающийся золотник выполнен с геометрической конфигурацией, соответствующей телу вращения с осью вращения, совпадающей с осью вращения вала, внутри золотника сформирована полость с входным отверстием с осью, совпадающей с осью вращения вала, золотник снабжен по крайней мере одним боковым относительно оси вращения сквозным фигурным окном, характеризующимся геометрией, обеспечивающей образование при пересечении контура окна множеством плоскостей, проходящих через ось вращения вала, множества отрезков с индивидуальной длиной, геометрическая конфигурация и размеры золотника заданы исходя из условия возможности расположения фигуры поперечного сечения трубчатообразной части, выбранного в области соединения ее с переходником, во внутренней области фигуры сечения золотника, получаемого в плоскости, в которой расположена ось вращения, при установке золотникового газораспределительного механизма в переходнике, золотник установлен в переходнике между частями трубчатообразной камеры закалки, вал - в плоскости симметрии камеры закалки, при этом вращающийся золотник со стороны входа в его полость установлен с примыканием входным отверстием полости к поверхности камеры с охватом канала вывода целиком входным отверстием полости, либо вращающийся золотник со стороны входа в его полость установлен в канале вывода с примыканием золотника к поверхности канала вывода, как в одном случае, так и в другом случае установка произведена с возможностью образования между камерой и золотником скользящего равномерно плотного контакта при вращении золотника, а частью, в которой выполнено по крайней мере одно боковое сквозное фигурное окно, вращающийся золотник установлен с примыканием к переходнику, с возможностью образования между переходником и золотником скользящего равномерно плотного контакта при вращении золотника и реализацией сообщения полости золотника с объемом каждой из частей трубчатообразной камеры закалки посредством фигурного окна.
18. Реактор по п. 2, отличающийся тем, что каждая пара камера-тело снабжена камерой закалки, выполненной симметричной относительно плоскости, перпендикулярной плоскостям, проходящим через зоны верхних мертвых точек, и плоскостям, проходящим через зоны нижних мертвых точек, и проходящей через прямую, на которой установлены пары камера-тело, и каждая камера закалки выполнена с возможностью сообщения с рабочим объемом через управляемый клапан канала вывода, а именно каждая камера закалки реализована в выполненном встык с парами камера-тело картере, в составе двух трубчатообразных одинаково симметрично расположенных относительно плоскости, перпендикулярной плоскостям, проходящим через зоны верхних мертвых точек, и плоскостям, проходящим через зоны нижних мертвых точек, и проходящей через прямую, на которой установлены пары камера-тело, являющуюся плоскостью симметрии камеры закалки, частей с выходящими наружу относительно картера концами, снабженными штуцерами, в картере трубчатообразные части соединены переходником, выполненным симметричным относительно плоскости симметрии камеры закалки, а управляемый клапан канала вывода выполнен в виде золотникового газораспределительного механизма, который установлен в переходнике, кроме того, каждая камера закалки выполнена с возможностью заполнения ее холодным инертным газом или содержания ее в состоянии холодного вакуума с заданием в ней требуемого давления.
19. Реактор по п. 18, отличающийся тем, что управляемый клапан вывода выполнен в виде золотникового газораспределительного механизма в составе вращающегося золотника и связанного с ним вала, ось вращения которого расположена в плоскости симметрии камеры закалки, вращающийся золотник выполнен с геометрической конфигурацией, соответствующей телу вращения с осью вращения, совпадающей с осью вращения вала, внутри золотника сформирована полость с входным отверстием с осью, совпадающей с осью вращения вала, золотник снабжен по крайней мере одним боковым относительно оси вращения сквозным фигурным окном, характеризующимся геометрией, обеспечивающей образование при пересечении контура окна множеством плоскостей, проходящих через ось вращения вала, множества отрезков с индивидуальной длиной, геометрическая конфигурация и размеры золотника заданы исходя из условия возможности расположения фигуры поперечного сечения трубчатообразной части, выбранного в области соединения ее с переходником, во внутренней области фигуры сечения золотника, получаемого в плоскости, в которой расположена ось вращения, при установке золотникового газораспределительного механизма в переходнике, золотник установлен в переходнике между частями трубчатообразной камеры закалки, вал - в плоскости симметрии камеры закалки, при этом вращающийся золотник со стороны входа в его полость установлен с примыканием входным отверстием полости к поверхности камеры с охватом канала вывода целиком входным отверстием полости, либо вращающийся золотник со стороны входа в его полость установлен в канале вывода с примыканием золотника к поверхности канала вывода, в обоих случаях установка произведена с возможностью образования между камерой и золотником скользящего равномерно плотного контакта при вращении золотника, а частью, в которой выполнено по крайней мере одно боковое сквозное фигурное окно, вращающийся золотник установлен с примыканием к переходнику, с возможностью образования между переходником и золотником скользящего равномерно плотного контакта при вращении золотника и реализацией сообщения полости золотника с объемом каждой из частей трубчатообразной камеры закалки посредством фигурного окна.
20. Реактор по п. 17 или 19, отличающийся тем, что вращающийся золотник выполнен с геометрической конфигурацией, соответствующей телу вращения, а именно конусу, или цилиндру, или шару.
21. Реактор по п. 17 или 19, отличающийся тем, что в золотнике, снабженном по крайней мере одним боковым сквозным фигурным окном, характеризующимся геометрией, обеспечивающей образование при пересечении контура окна множеством плоскостей, проходящих через ось вращения вала, множества отрезков с индивидуальной длиной, фигурное окно сформировано в форме полукруга, или четверти круга, или треугольника.
22. Реактор по п. 11 или 12, отличающийся тем, что канал ввода, реализованный в составе пары снабженных управляемыми клапанами ввода входных отверстий для подачи реагентов в рабочий объем, соединен со средствами подачи реагентов, одно входное отверстие выполнено для подачи основного реагента, содержащего перерабатываемое вещество, и соединено с узлом подготовки и подачи основного реагента посредством управляемого клапана ввода, обеспечивающего требуемую дозировку его поступления в рабочий объем, связанного с программно-аппаратным комплексом, второе входное отверстие выполнено для подачи вспомогательного реагента, содержащего вспомогательное вещество, и соединено с узлом подготовки и подачи вспомогательного реагента, выполненным в составе воздухонагнетателя, регулятора температуры воздуха, эжекторного смесителя, теплообменника, при этом воздухонагнетатель через регулятор температуры воздуха соединен с эжекторным смесителем с возможностью подачи в него нагнетаемого воздуха после коррекции температуры для смешивания с подаваемыми в эжекторный смеситель необходимыми для протекания реакции переработки вспомогательными веществами, эжекторный смеситель соединен с теплообменником с возможностью подачи в последний воздуха, смешанного со вспомогательными веществами, для последующей температурной коррекции, теплообменник связан со вторым отверстием для подачи вспомогательного реагента посредством управляемого клапана ввода, обеспечивающего требуемую дозировку его поступления в рабочий объем, связанного с программно-аппаратным комплексом.
| СПОСОБ ПОЛУЧЕНИЯ СИНТЕЗ-ГАЗА | 1996 |
|
RU2096313C1 |
| ХИМИЧЕСКИЙ РЕАКТОР СЖАТИЯ ДЛЯ ПОЛУЧЕНИЯ СИНТЕЗ-ГАЗА | 1998 |
|
RU2129462C1 |
| СПОСОБ ПОЛУЧЕНИЯ СИНТЕЗ-ГАЗА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2191743C2 |
| КОМБИНИРОВАННАЯ УСТАНОВКА ДЛЯ СЖИЖЕНИЯ ГАЗОВ И ИХ ХРАНЕНИЯ НА ОСНОВЕ КРИОГЕННОЙ ХОЛОДИЛЬНОЙ МАШИНЫ СТИРЛИНГА | 1999 |
|
RU2151348C1 |

