ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к схемам возбуждения для массива преобразователей и, в частности, к схемам управления массивом для визуализации.
УРОВЕНЬ ТЕХНИКИ
Оценка благополучия плода является очень важной клинической практикой при ведении беременности. В настоящее время наиболее распространенными способами оценки благополучия плода для врачей являются анализ частоты сердечных сокращений плода с использованием кардиотокографа (CTG) и оценка движения крови по сосудам матери и плода с использованием ультразвукового допплеровского сигнала. Ультразвуковой допплеровский анализ формы волны конкретных кровотоков плода и матери является частью признанной медицинской практики и стандартной рекомендацией в различных клинических руководствах по диагностике и оценке беременности высокого риска (диабет 2-го типа, гипертония или пре-эклампсия у матери и внутриутробная задержка роста (IUGR) у плода). Одной из главных целей обычного дородового наблюдения является выявление плода «группы риска» для клинического вмешательства с тем, чтобы снизить перинатальную заболеваемость и смертность. Некоторыми из сосудов, используемых в оценке благополучия плода, являются: пупочная артерия, средняя мозговая артерия, венозный проток и (левая и правая) маточные артерии и пупочные вены.
Ультразвуковые сканеры стали незаменимы при мониторинге беременностей по всему миру. В настоящее время они обеспечивают оптимальный вариант для мониторинга роста и развития плода. Дуплексные ультразвуковые сканеры обеспечивают ультразвуковую допплеровскую диагностику импульсной волны в дополнение к обычному сканированию. Цветовая и энергетическая допплеровская диагностики являются новыми дополнениями к набору сканеров, которые обеспечивают визуализацию сосудов. Цветовая допплеровская диагностика, в частности, обычно предусматривается тем, что в результате называется «триплексным» сканером.
Допплеровские обследования обычно требуют большой степени мастерства для получения клинически полезных измерений. Например, правильная ориентация зонда по отношению к сосуду важна для обеспечения того, что угол луча-потока меньше, чем 60 градусов. Ошибки, допущенные при измерениях, усиливаются, когда углы, превышающие 60 градусов, используются при определении скоростей. Стандартный рабочий процесс на клиническом ультразвуковом сканере позволяет специалисту по ультразвуковой эхографии определить ориентацию зонда по отношению к сосуду с использованием стандартного В-режима и цветового отображения потока. Затем получают спектральные допплеровские измерения, таким образом обеспечивая правильность измеренных скоростей.
Использование ультразвука в сосудистых применениях для выполнения допплеровского измерения скорости требует наличия квалифицированного персонала.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
В странах с формирующимся рынком, таких как Индия, дефицит специалистов ограничивает наличие и доступ к ультразвуку. Следовательно, автоматизированный способ получения и оценки допплеровских сигналов для клинической диагностики (не требуя от пользователя интерпретировать изображение ультразвукового сканирования) может быть полезным для не-радиологов, таких как OB/GYN, или кардиологов, которые являются основными лицами, осуществляющими лечение.
Помимо того, недорогая система нужна для обеспечения привлекательного решения в странах с развивающейся рыночной средой. Устройства, которые в настоящее время являются доступными на рынке для дородовых осмотров и родов, это ультразвуковые и CTG машины. Однако оба вида этих устройств являются относительно дорогими.
Существует потребность в недорогом, легком в использовании решении для предоставления допплеровского измерения скорости для обследования и мониторинга беременностей высокого риска.
Принадлежащая данному заявителю международная патентная публикация WO 2012/085778 на имя Anand et al., озаглавленная «Automated Doppler Velocimetry Using a Low-Cost Transducer» («Автоматизированная допплеровская велосиметрия с использованием недорогого преобразователя»), раскрывает ручной, автономный, ультразвуковой зонд на основе эффекта Допплера, чья обследующая поверхность не так сильно разделена на отдельные преобразовательные элементы, т.е. на относительное малое число отдельных элементов. Как здесь уже было упомянуто, зонд работает автоматически без необходимости интерпретировать визуальное отображение анатомии.
Настоящая патентная заявка направлена на новые схемы возбуждения для массива преобразовательных элементов, с конкретным применением к зонду, упомянутому непосредственно выше.
В соответствии с настоящим изобретением устройство разработано для визуализации по времени при параллельном использовании преобразовательных элементов текущей группы, и по времени последовательно по группам. Группы пространственно расположены по отношению друг к другу таким образом, чтобы взаимно соединяться друг с другом поэлементно.
В одном аспекте настоящего изобретения устройство сконфигурировано не для совместного использования любых элементов из групп для фокусировки и не для направления луча, используемого при визуализации.
В одном варианте осуществления устройство включает в себя элементы из групп.
В другом аспекте устройство дополнительно сконфигурировано для изменения группирования.
В подаспекте упомянутое изменение основано на входных данных, указывающих размер сосуда и/или глубину сосуда.
В альтернативном подаспекте упомянутое изменение включает в себя переход между одним и другим из по меньшей мере двух состояний пространственного расположения. По меньшей мере одно из этих состояний характеризуется соответствующей минимальной, ненулевой степенью несмежности элемента к элементу между элементами группы.
В подаспекте альтернативы устройство сконфигурировано для упомянутого перехода автоматически в ответ на входные данные, указывающие на размер сосуда и/или глубину сосуда.
В определенном аспекте элементы текущей группы имеют соответствующие поверхности с соответствующими геометрическими центрами. Устройство сконфигурировано для минимальной ненулевой степени несмежности элемента к элементу между элементами текущей группы. Минимум представляет собой минимальное расстояние между геометрическими центрами.
В одном подаспекте минимального расстояния для одной или более пар элементов текущей группы достаточно, чтобы позволить некоторому элементу из другой одной из групп находиться между парой с учетом коллинеарности соответствующих геометрических центров.
Во втором подаспекте минимального расстояния для одной или более пар элементов текущей группы достаточно, чтобы позволить некоторым двум элементам из другой одной или более групп находиться между парой с учетом коллинеарности соответствующих геометрических центров.
В связанном аспекте элементы текущей группы попарно разделены по меньшей мере одним находящимся между ними соответствующим элементом из другой группы.
В другом аспекте группы являются поэлементно взаимоисключающими.
В другом аспекте все элементы из групп вместе упорядочены в многомерный массив.
В еще одном аспекте использование включает в себя одновременную подсветку элементов текущей группы.
В еще одном аспекте визуализация содержит медицинскую визуализацию.
В дополнительном аспекте визуализация использует технику анализа потока текучей среды.
В еще одном аспекте портативное автономное диагностическое устройство включает в себя описанное выше устройство.
В одном из вариантов осуществления устройство сконфигурировано в виде одной или более интегральных схем.
В еще одном отличающемся аспекте устройство сконфигурировано для объемной визуализации посредством операционных преобразовательных элементов параллельно по времени и не для совместного использования любых элементов для фокусировки и направления луча, используемого при визуализации.
В подаспекте визуализация включает в себя выполнение анализа потока текучей среды.
Подробная информация о новом устройстве и его схемы подсветки изложены ниже при помощи следующих чертежей, которые приведены не в масштабе.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг.1 представляет собой схему, демонстрирующую в качестве примера ультразвуковой зонд, интересующий объем, содержащий кровеносные сосуды, форму волны кровотока и соответствующие клинические допплеровские показатели;
Фиг.2 представляет собой концептуальную блок-схему примерной обработки сигналов;
Фиг. 3А и 3В представляют собой блок-схемы, демонстрирующие пример работы зонда;
Фиг. 4А-4С представляют собой схемы некоторых возможных состояний пространственного расположения и схем возбуждения для массива преобразователей;
Фиг.5 представляет собой блок-схему примерной схемы возбуждения; и
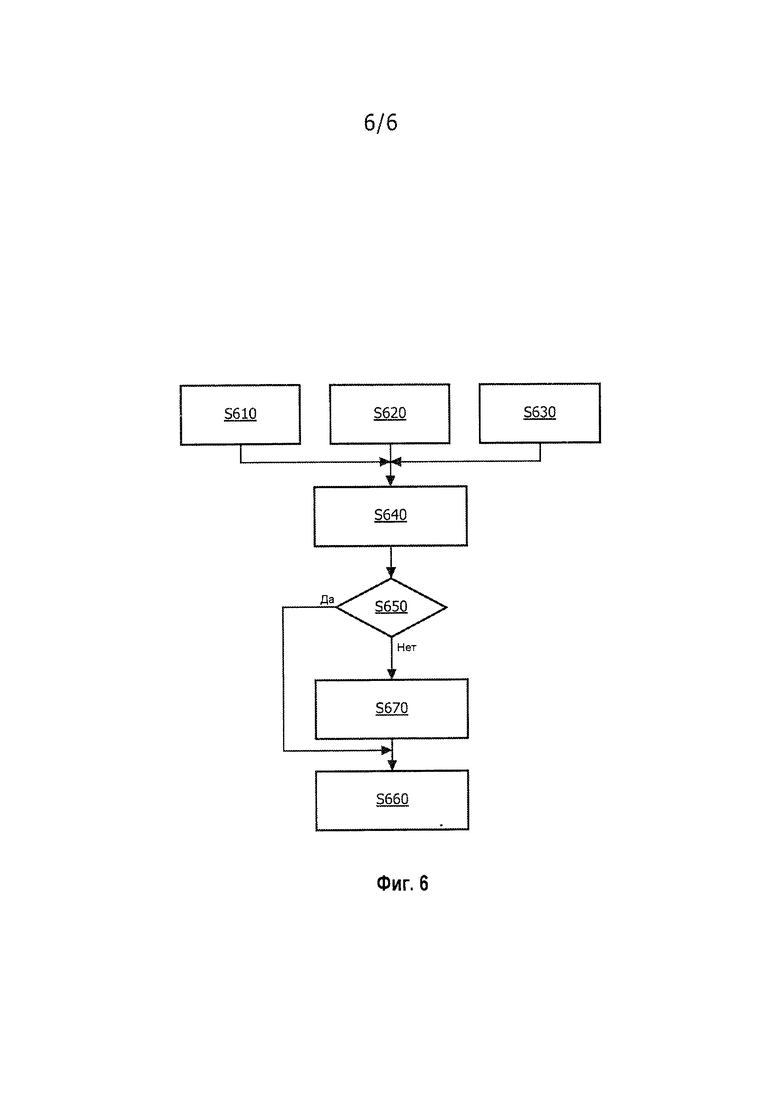
Фиг.6 представляет собой примерную блок-схему инициализации состояний пространственного расположения.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Описанию того, что предлагается в настоящей заявке в отношении схем возбуждения преобразователей, предшествует то, что в значительной степени представляет собой обзор зонда на основе эффекта Допплера, раскрытого в патентной заявке «Автоматизированная допплеровская велосиметрия с использованием недорогого преобразователя». Обсуждение, сфокусированное, в частности, на настоящем изобретении, будет затем начато со ссылкой на Фиг.4 и последующие фигуры.
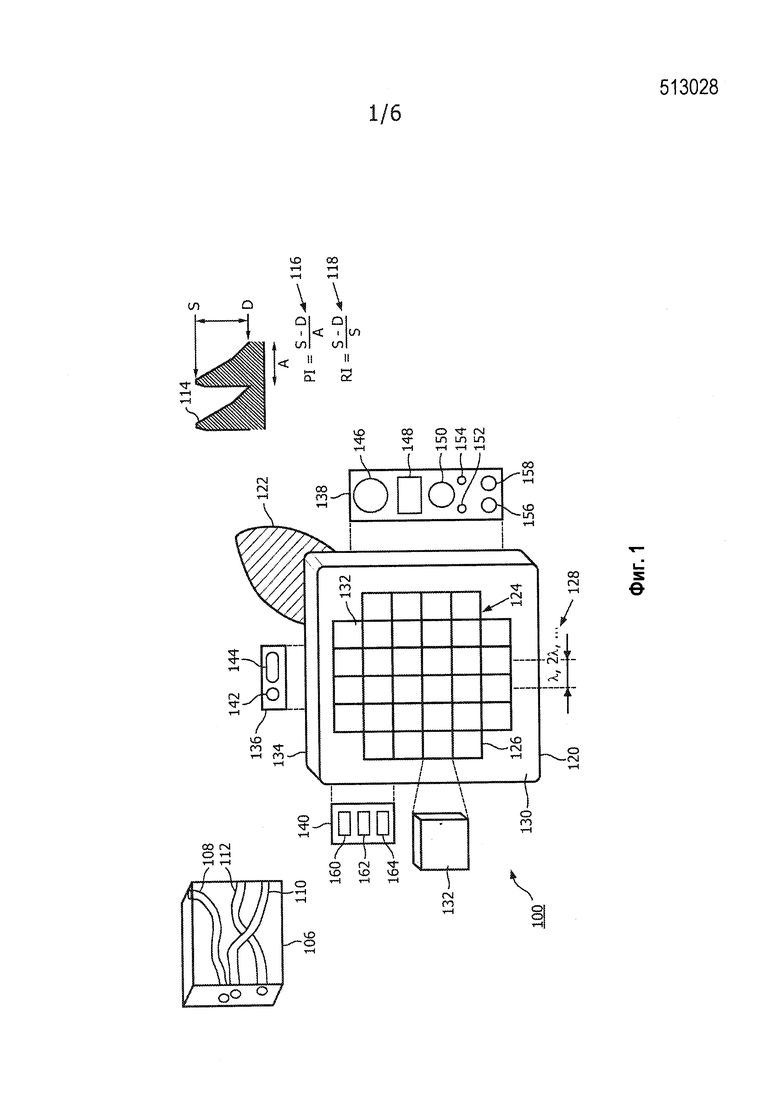
Фиг.1 изображает, в качестве иллюстративного и не ограничивающего примера, ультразвуковой зонд 100 и объем или «интересующий объем» 106, содержащий кровеносные сосуды 108, 110, 112. Дополнительно изображены форма 114 волны кровотока или «спектрального допплеровского ультразвука» и соответствующие клинические допплеровские показатели 116, 118.
Зонд 100 реализован в качестве автоматического, портативного, автономного, самодостаточного устройства ультразвукового исследования. Оно имеет корпус 120 преобразователей и ручку 122.
Внутри корпуса 120 преобразователей нефазированный двумерный массив 124 преобразователей содержит преобразовательные элементы 126, причем количество элементов определяется объемом сканирования и анатомией. Сбор данных происходит индивидуально посредством элемента 126, хотя, как более подробно обсуждается ниже, элементы находятся в рабочем состоянии одновременно, чтобы сократить общее время сбора.
Как видно из Фиг.1, в качестве примера количество элементов 126 равно 32. Таким образом, при размере элемента в 10 мм покрывается около 6 см × 6 см объема. На одном уровне с лицевой поверхностью 130 корпуса 120 находятся принимающие ультразвук поверхности 132 преобразовательных элементов 126, те же поверхности передают, т.е. выводят, ультразвук.
Всего лишь 32 элемента 126 резко контрастируют с намного большим числом элементов, которое потребовалось бы при обычной медицинской визуализации для покрытия того же объема 6 см × 6 см.
В связи с этим электронная фокусировка для медицинской визуализации, как с преобразователем с фазированной решеткой, требует межэлементных интервалов 1/2 длины волны, т.е. 1/2 λ или меньше. Допплеровский ультразвук для визуализации может, как правило, варьироваться между 2×106 и 4×106 циклов в секунду (от 2 до 4 МГц). Ультразвук проходит сквозь мягкие ткани тела со скоростью около 1540 м/с. Длина волны, т.е. λ, равняется скорости, поделенной на частоту. Здесь это 1540 м/с поделить на приблизительно 2×106 циклов/с = 0,8 мм. Медицинская ультразвуковая визуализация для отображения вследствие этого требовала бы наличия межэлементных интервалов менее 0,4 мм, и площадь поверхности элемента менее (0,4 мм)2, что меньше чем 0,2 мм2. Поэтому с малым размером элемента порядка 1/2 λ тысячи элементов 126 потребовались бы для построения 2D массива, наподобие того, который изображен на Фиг.1, который покрывает объем 6 см × 6 см.
Интервал (размер) элементов на Фиг.1 равняется 10 мм, что, как обсуждалось выше, обычно будет превышать 12λ ультразвука, используемого при исследовании интересующего объема 106 присутствующих кровеносных сосудов 108, 110, 112.
В более общем плане элементы 126 в соответствии с тем, что предлагается в настоящем описании, разнесены друг от друга более чем на 1/2 λ, хотя межэлементный интервал 128 может быть равен λ, 2λ или более, как обсуждалось выше. Площадь поверхности 132 соответственно равна по меньшей мере 0,6 квадратных миллиметров (мм2) и может быть больше, например 10 мм2, 25 мм2 или 100 мм2, как показано на Фиг.1.
Предпочтительно автоматизированное ультразвуковое устройство 100 не полагается на отображение медицинских изображений при получении диагноза; но вместо этого предлагает массив, состоящий из меньшего количества преобразовательных элементов и, вследствие этого, меньшего количества каналов. Таким образом, стоимость производства низка, и в то же время сохраняется надежность в силу автоматической работы. Надежность может быть даже улучшена, например, в случае, когда медицинские обследования выполняются в более быстром темпе. Автоматическая работа также сокращает время обследования, тем самым снижая нагрузку и делая обследование более удобным.
Во время сбора допплеровских данных элементы 126 запускаются либо последовательно, либо в одной или более группах, следя за тем, чтобы акустический сигнал от одного элемента не влиял существенно на другие, которые возбуждаются в то же время. Для каждого элемента 126 период приема отстает от периода передачи. Допплеровский интервал приема соответственно расположен внутри периода приема с тем, чтобы предоставить возможность взятия выборок с соответствующей глубины в пределах интересующего объема 106.
На задней поверхности 134 корпуса 120 к пользователю обращено некоторое количество панелей ввода-вывода пользовательского интерфейса, которые включают в себя верхнюю панель 136, левую панель 138 и правую панель 140. Переключатель 142 включения-выключения и поверхность 144 аудиодинамика расположены на верхней панели 136. Левая панель 138 обрамляет кнопку 146 функциональной навигации/активации, дисплей 148, индикатор 150 определения допплеровской мощности, индикатор 152 сбора данных о сердцебиении плода, индикатор 154 сбора данных о сердцебиении матери, индикатор 156 нормального кровотока и индикатор 158 анормального кровотока. Правая панель 140 включает в себя три окна 160, 162, 164 обратной связи для ввода параметров инициализации.
Все элементы 126 массива 124 работают на визуализацию независимо.
Это является противоположным, например, фазированным решеткам, которые используют множество отдельных преобразовательных элементов совместно для визуализации или управления лучом. В фазированных решетках управление и фокусировка выполняются путем надлежащей задержки входных и/или выходных сигналов элементов по отношению к другим элементам.
В соответствии с тем, что предлагается в настоящей заявке, преобразовательные элементы из одной группы запускаются одновременно. Элементы группы продолжают визуализацию параллельно и независимо по элементам до истечения времени периода сбора данных группы.
Устройство для визуализации по группам сконфигурировано не для совместного использования любых элементов 126 для фокусировки и направления луча, используемого при визуализации. В качестве демонстрации все преобразовательные элементы имеют свои соответствующие сигналы. Некоторые из сигналов при передаче отстают от других сигналов передачи, таким образом приводя к фокусировке и/или управлению направлением результирующего ультразвукового луча. Зонд не реализован для такого протокола. Аналогично при приеме никакая задержка не применяется дифференциально к элементам.
Клинические допплеровские показатели, такие как индекс 116 пульсации (PI) и индекс 118 резистентности (IR) являются независимыми от угла допплеровскими мерами пульсации крови. Символы S, D и A, аннотирующие форму 114 волны кровотока на Фиг. 1, представляют собой соответственно сдвиг пиковой систолической частоты, сдвиг конечной диастолический частоты и один сердечный цикл. Форма 114 волны кровотока представляет собой график допплеровской частоты и, таким образом, зависимости скорости кровотока от времени.
Зонд 100 может использовать оба индекса PI и IR при выявлении кровеносных сосудов и оценке нормальности кровотока.
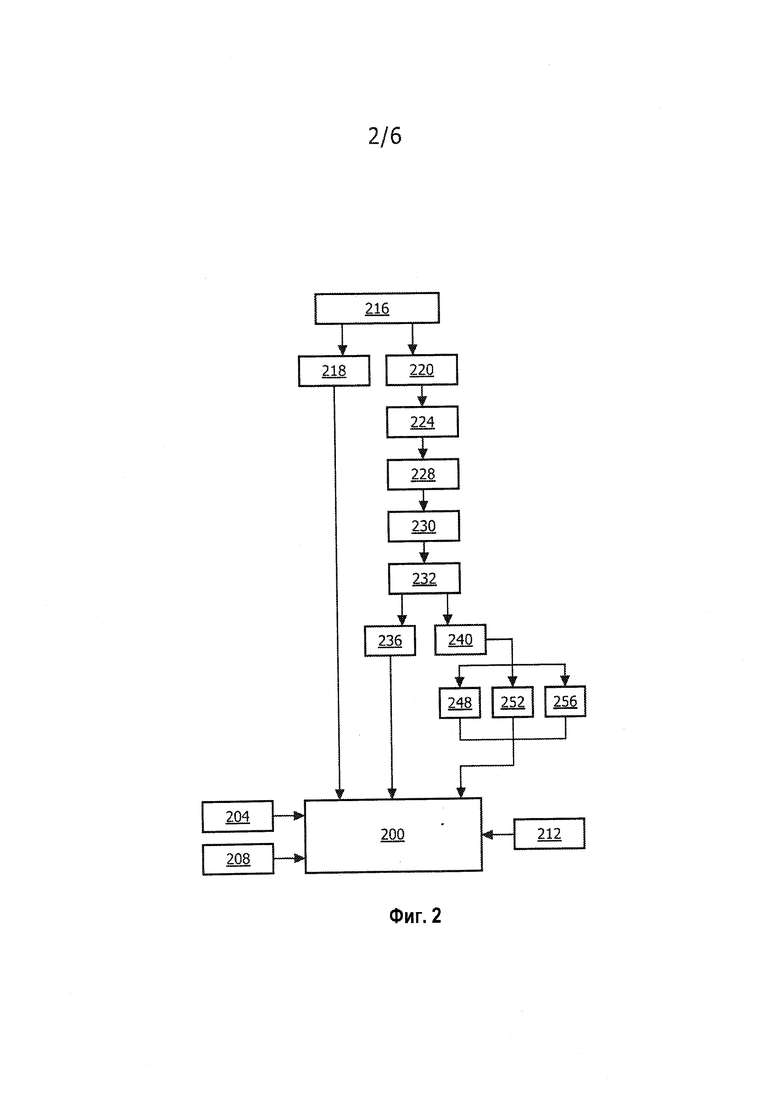
Обработка сигналов, задействованная при классификации кровеносных сосудов 108-112, найденных зондом 100 в интересующем объеме 106, показана, в качестве примера, на Фиг. 2.
Классификатор 200 кровеносных сосудов может быть реализован в виде классификатора k-го ближайшего соседа (K-NN) при K=3, например.
Классификатор сначала используется, чтобы прогнозировать, является ли сосуд 108-112 веной или артерией. Используются различные входные признаки для классификатора 200, такие как IP, причем каждый из M типов входных данных соответствует размерности в М-мерном пространстве признаков. Другой тип входных данных для классификатора представляет собой обучающие примеры. Каждый обучающий пример соответствует реальному клиническому случаю и включает в себя М входных признаков для этого случая, определяя пример как конкретную точку, т.е. «точку примера» в М-мерном пространстве. Каждой точке примера поставлен в соответствие исход «вена» или «артерия», в зависимости от того, в самом деле, этот обучающий пример относится к вене или артерии. После инициирования классификатора 200 обучающими примерами формируется точка в М-мерном пространстве с использованием входных признаков, полученных для кровеносных сосудов 108-112, в настоящее время классифицируемых. Для К=3 3 ближайшие соседние (примерные) точки идентифицированы. Каждый сосед будет иметь в качестве своих выходных данных значение «артерия» или «вена». Преобладает большинство голосов. Никогда не бывает ничья, так как 3 - это нечетное число.
Если сосуд классифицирован как артерия, классификатор 200 затем определяет, принадлежит она матери или плоду, посредством того же алгоритма ближайшего соседа. Если кровеносный сосуд - это материнская артерия, проводится определение того, является ли она маточной артерией. Если, с другой стороны, это артерия плода, проводится определение того, является ли она пупочной артерией. Последние два определения также используют алгоритм ближайшего соседа.
Классификаторы ближайшего соседа обладают преимуществом простоты, хотя другие альтернативные методы, такие как нейронные сети или машины опорных векторов (SVM), могли бы быть использованы вместо них.
Входные данные классификатора от пользователя включают в себя гестационный возраст 204 и грубое, приблизительное местоположение 208 зонда на животе матери. Сосудистая модель 212 в виде обучающих примеров для классификатора 200 также предоставляется.
Другие входные данные поступают прямо или косвенно из информации об импульсных отраженных сигналах из полученного ультразвука 216.
Непосредственно из ультразвука 216 получается средняя оценка 218 индекса отражения для ткани вокруг зонда 100. Этот индекс сравнивается с заранее определенным списком индекса отражения для выявления положения зонда 100 на теле матери.
Для формирования косвенных входных данных принятый ультразвук демодулируется в демодуляторе 220 для извлечения ультразвукового допплеровского сигнала 224 из несущей частоты. Быстрое преобразование Фурье (БПФ) 228 выполняется применительно к допплеровскому сигналу 224 для генерации спектрограммы, или «сонограммы на основе БПФ», 230. Из спектрограмм 230 извлекается один или более релевантных спектральных профилей 232. Термин «спектральный профиль» обозначает часть сонограммы 230, которая соответствует кровотоку через артерию или вену. Спектральный профиль 232 может быть аппроксимирован в виде области между двумя кривыми, соответствующими максимальной или минимальной спектральным скоростям (или спектральным частотам). Спектральная ширина 236 полученного спектрального профиля 232 оценивается и подается на классификатор 200. Из спектрального профиля (профилей) 232 извлекается кривая 240, соответствующая пиковым (или, в качестве альтернативы, средним) спектральным скоростям. Конкретные временные признаки 248 также извлекаются из спектрального профиля (профилей) 232. Эти признаки включают в себя, например, наличие выемки, непосредственно предшествующей пульсу волны 114 кровотока маточной артерии. IP и IR для сосуда, который подлежит классификации 252, также извлекаются. В ходе процедуры инициализации, которая предшествует исследованию текущего интересующего объема 106, выполняется оценка 256 времени цикла пульса на основе спектрального профиля (профилей) 232, которые затем извлекается.
В оперативном плане, как показано на Фиг. 3А и 3В, пользователь, который может быть клиническим врачом, акушеркой, врачом общей практики, акушером/гинекологом или радиологом плода, вводит, как часть процедуры инициализации, целевой кровеносный сосуд для исследования, например, левую маточную артерию (подпадающую под физиологическую категорию кровеносных сосудов «маточная артерия»); гестационный возраст; и грубое описание расположения зонда в момент окончания инициализации и начала обследования. В частности, после приведения в действие переключателя 142 включения/выключения пользователь два раза подряд быстро нажимает кнопку 146 функциональной навигации/активации. В ответ на это на дисплее 148 появляется первый выбор кровеносных сосудов. Если появившийся выбор не является целевым кровеносным сосудом для исследования, кнопка 146 нажимается один раз, чтобы привести новый выбор на дисплей 148. Это делается до тех пор, пока отображенный выбор не совпадает с выделенным. Кнопка 148 затем удерживается, и выбор отображается в окнах 160 обратной связи для ввода параметров инициализации. На дисплее 148 появляется выбор для гестационного возраста, выраженный в месяцах или неделях. Аналогичным образом пользователь переходит к правильному возрасту и удерживает кнопку 146, чтобы отобразить свой выбор окну 162. Чтобы завершить ввод параметров инициализации, выполняется та же процедура для местоположения зонда, причем выбранное местоположение отображается в окне 164. При необходимости может быть назначен более чем один целевой кровеносный сосуд. Они могут быть обработаны в порядке, в котором они обнаружены, или же в частном порядке, определенном в процессе инициализации (этап S304).
Теперь пользователь продолжает инициализацию посредством помещения зонда на живот матери для оценки 256 времени цикла пульса. Пользователь нажимает на кнопку 146 функциональной навигации/активации для запуска ультразвуковой допплеровской операции. Преобразователь будет сканировать глубину положения каждого элемента для выявления движения крови, т.е. допплеровской мощности. Если загорается индикатор 150 обнаружения допплеровской мощности, обнаруживается, что допплеровская мощность в полосе частот 300-1000 Гц, характеризующей кровоток, имеет достаточную величину для заключения, что сердцебиение матери или плода может быть надежно измерено по артериальному кровотоку. Частота сердечных сокращений матери, как правило, ниже частоты сердечных сокращений плода. В дополнение к индикатору 150 аудиодинамик 144 может выдать короткий сигнал, чтобы оповестить пользователя о наступлении обнаружения допплеровской мощности. В качестве альтернативы или дополнения обратный допплеровский аудиосигнал может поступать через аудиодинамик 144. Зонд 100 удерживается на месте в течение нескольких секунд; в противном случае допплеровская мощность падает, и снова нужно будет достичь зажженного индикатора 150 света. Если по истечении периода в несколько секунд ни материнское, ни плодовое сердцебиение не обнаружены, пользователь может сдвинуть зонд в другое положение на животе матери и может повторять это действие, пока не произойдет обнаружение. Если обнаруживается материнское или плодовое сердцебиение, т.е. сосуд организма, и в частности, найдена артерия по маршруту 220-232, 240, 256 обработки сигналов, зажигается соответствующий индикатор 152 сбора данных о сердцебиении плода или индикатор 154 сбора данных о сердцебиении матери (этап S308). Пользователь повторно перемещает зонд 100 к следующему положению на животе матери, пока оба индикатора 152, 154 не зажгутся (этап S312), указывая на то, что время цикла пульса, клинический допплеровский параметр, был получен и извлечен как для матери, так и для плода.
Теперь пользователь помещает зонд для проверки нормальности/анормальности кровотока в соответствующем сосуде матери или плода, который является целевым сосудом (этап S316). Если индикатор 150 обнаружения допплеровской мощности не зажигается (этап S320), допплеровская мощность, характеризующая кровоток, в полосе частот 300-1000 Гц не была обнаружена или обладает недостаточной величиной для нахождения одного или более кровеносных сосудов. В этом случае пользователь сдвигает и наклоняет зонд 100 (этап S324), пока индикатор 150 не загорится.
После того как индикатор загорится, зонд 100 удерживается на месте для обработки интересующего объема 106. Каждый элемент 126 будет зажжен на несколько сердцебиений в течение, в общей сложности, от 3 до 5 секунд для того, чтобы получить допплеровскую информацию в пределах его следа. Это предусматривает от около 2 до 3 минут сбора объемных данных, если 32 элемента 126 обрабатываются один за другим. Для сокращения общего периода времени элементы 126 обрабатываются в одной или более группах, заботясь о том, чтобы акустические лучи соответствующих элементов 126 не интерферировали значительно и не ухудшали принятые данные. Уменьшение общего времени сбора сокращает возможность ошибок из-за движения пациента или врача, проводящего обследование, во время периода сбора (S328). Возможные группировки обсуждаются более подробно ниже.
Предпочтительно, чтобы сбор объемных данных происходил автоматически и без необходимости вмешательства со стороны пользователя. Поскольку отображение изображения кровеносного сосуда не требуется, не требуется электронная фокусировка ультразвука. Таким образом, устройство упрощается и становится экономически эффективным.
Итогом обработки может быть зеленый свет индикатора 156 нормального кровотока, красный свет индикатора 158 анормального кровотока или отсутствие любого света, если обследуемый в настоящий момент кровеносный сосуд не совпадает с целевым сосудом. Если не загорается ни один из индикаторов 156, 158 (этап S332), обработка возвращается на этап S324.
Пример обработки на этапе S328 представлен на Фиг.3В. Интересующий объем 106, который будет меняться при каждом перемещении или наклоне зонда 100, но который зафиксирован в то время, когда пользователь устойчиво держит зонд, является предметом исследования для текущих кровеносных сосудов. В частности, допплеровская мощность это вычисляемая полоса частот 300-1000 Гц. При этом генерируется 3-мерное (3D) представление сосудов 108-112 в объеме сканирования. Конечное число сосудов в объеме сканирования определяется с помощью критерия непрерывности. Например, для 8 непосредственно смежных пикселей, т.е. 4 боковых и 4 диагональных пикселей, предполагается, что смежные пиксели, для которых определен кровоток, представляют один и тот же кровеносный сосуд. Еще кровеносные сосуды могут быть отображены в 3D, так как интервалы приема преобразователей могут быть настроены на различные глубины. В 3D алгоритм линейного приближения на основе метода наименьших квадратов используется для нахождения прямой линии, соединяющей точки, определенные с помощью критерия непрерывности. Затем вычисляется угол прямой линии от принимающих ультразвук поверхностей 132 преобразовательных элементов 126. Это приводит к получению 3D-карты, при помощи которой могут быть идентифицированы отдельные кровеносные сосуды и их индивидуальные ориентации. С определенными ориентациями с карты могут быть определены пространственные характеристики. Например, во время сканирования маточной артерии допплеровский пробный объем обычно помещается в псевдо-пересечение матки и подвздошных артерий. Пересечение определяется как положение минимальной суммы квадратов расстояний между пикселями на сосудах (этап S336). В качестве альтернативы смежность, исследуемая для критерия непрерывности, может вместо 8 смежных пикселей в 2D рассматриваться для 26 пикселей в 3D.
Если карта сосудов не содержит сосуды 108-112 (этап S340), обработка текущего интересующего объема 106 завершена, диагноз не поставлен, и управление переходит к этапу S332.
В противном случае, если обнаружен сосуд 108-112, один из этих сосудов, обнаруженных в интересующем объеме 106, выбирается для анализа потока текучей среды и в качестве кандидата на соответствие целевому сосуду (этап S344). Любой критерий может быть использован при выборе, так как отбор кандидатов не заканчивается, пока целевой сосуд не будет найден и все сосуды 108-112 в интересующем объеме 106 не будут обработаны.
Для выбранного сосуда генерируется частная информация, как показано на Фиг.2 (этап S348). Информация включает в себя спектральные допплеровские характеристики формы волны (среднюю оценку частоты, время цикла - интервал времени между 2 последовательными пиками, спектральную ширину - ширину между максимальной и минимальной частотными огибающими на пиках и впадинах), время до пика, неисправность держателя и клинические допплеровские показатели (такие как S/D, IP и RI), например.
Основываясь на сгенерированной информации и ее анализе, классификатор 200 кровеносных сосудов классифицирует выбранный сосуд (этап S352).
Если классификация не соответствует целевому сосуду (этап S356), и не существует следующего сосуда из множества обнаруженных в интересующем объеме 106 (этап S360), управление переходит к этапу S332.
В противном случае, если классификация не соответствует целевому сосуду, а следующий сосуд существует, управление обратно возвращается к этапу S344, где этот следующий сосуд выступает в роли выбранного сосуда (этап S364).
Если, с другой стороны, классификация соответствует целевому сосуду, зонд 100 делает вывод о нормальности кровотока в цели, т.е. выбранном сосуде. В частности и в качестве примера допплеровские параметры сравниваются с номограммами, т.е. таблицами, представляющими диапазон ожидаемых допплеровских показателей как функцию гестационного возраста, чтобы определить, нормален или анормален профиль потока. Дополнительно перед тем, как делать вывод о нормальности кровотока, может быть произведен дополнительный сбор допплеровских данных (этап S368).
На основе вывода указание относительно нормальности кровотока в выбранном сосуде предоставляется посредством зеленого света индикатора 156 нормального кровотока и красного света индикатора 158 анормального кровотока (этап S372).
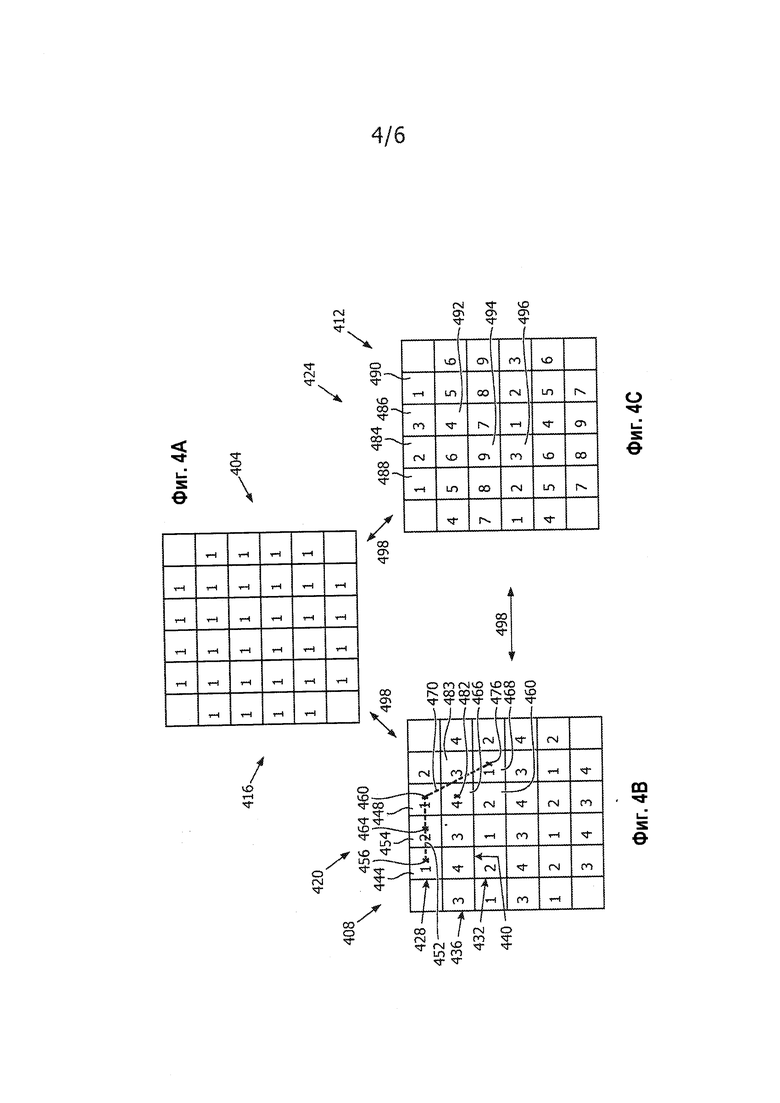
Фиг. 4А-4С иллюстрируют примерные состояния 404, 408, 412 пространственного расположения и схемы 416, 420, 424 возбуждения для массива 124 преобразователей.
В первом состоянии 404 пространственного расположения, показанном на Фиг. 4А, количество преобразовательных элементов 126, которые находятся между элементами одной и той же группы, равняется нулю. В частности, существует всего одна группа, и элементы 126 группы упорядочены в непосредственной смежности в массиве 124. Соответственно степень внутригрупповой межэлементной несмежности равняется нулю. Элементы 126, несмотря на индивидуальную визуализацию, обрабатываются для отображения одновременно, как единая группа, для получения карты сосудов. Период времени, необходимый для получения данных для создания карты, следовательно, является относительно коротким, т.е. 3-5 секунд для каждого элемента и, следовательно, всего 3-5 секунд. Это, как было упомянуто выше, является предпочтительным, так как вероятность ошибки визуализации, вызванная движением пациента или врача, проводящего обследование, здесь меньше.
Первое состояние 404 пространственного расположения не всегда осуществимо. Акустическая перекрестная помеха между элементами 126, которая является нежелательной, возрастает по мере возрастания межэлементной смежности в массиве 124. В частности, существует потенциальная возможность для неприемлемого количества ультразвука, принятого элементом 126, которой был передан соседним элементом.
Однако количество перекрестных помех уменьшается с неглубокими сосудами. Также оно уменьшается с меньшими сосудами, т.е. эффект интерференции зависит от размера отображаемого сосуда и размера элемента 126.
Во втором состоянии 408 пространственного расположения, показанном на Фиг.4В, количество преобразовательных элементов 126, которые находятся между двумя элементами одной группы, равняется по меньшей мере одному. Другими словами, по меньшей мере два элемента группы отделяются друг от друга по меньшей мере одним соответствующим элементом. Восемь элементов 126, обозначенные номером «1» на Фиг.4В, находятся в той же самой группе, именуемой ниже первой группой 428 для второго состояния 408 пространственного расположения. Вторая группа 432 для второго состояния 408 пространственного расположения состоит из восьми элементов 126, обозначенных номером «2». Аналогично, третья группа 436 и четвертая группа 440 второго состояния пространственного расположения соответственно состоят из восьми элементов 126, обозначенных номерами «3» и «4». Группы 428, 432, 436 и 440 перекрываются в пространстве, оставаясь поэлементно различными.
В первой группе 428, хотя тот же принцип применяется в других группах 432, 436, 440 для этого состояния 408 пространственного расположения, любые два смежных элемента 444, 448 из группы разделены по меньшей мере минимальным, заранее определенным расстоянием 452.
Это расстояние представлено на Фиг. 4В в виде ломаной линии. Минимальное расстояние 452 в некоторых вариантах осуществления является ненулевой степенью внутригрупповой межэлементной несмежности, связанной с состоянием 408 пространственного расположения.
Это отличается от нулевой степени внутригрупповой межэлементной несмежности. Примером последнего будет строгий двухгрупповой шахматный порядок. Такой порядок будет иметь нулевую смежность, потому что углы внутригрупповых элементов встречаются. Тем не менее, следует отметить, что такой порядок будет по-прежнему находиться в пределах предполагаемого объема изобретения в силу особенности групп 428, 432, 436, 440 взаимно поэлементно соединяться между собой.
Расстояние между элементами может быть измерено при помощи соответствующих геометрических центров 456, 460. Геометрический центр поверхности 132 элемента может быть вычислен следующим образом. Теоретически поместить поверхность 132, в зависимости от случая, в двух- или трехмерную мелкую сетку с одинаковыми ячейками. Для каждой координаты сетки, например, «х» или «у», взять среднее арифметическое по всем ячейкам, совпадающим с поверхностью 132.
Минимальное расстояние 452, свидетельствующее о ненулевой степени внутригрупповой межэлементной несмежности, может быть достаточным, чтобы позволить некоторому элементу другой группы 432, 436, 440 поместиться между парой элементов 444, 448 первой группы с соответствующими коллинеарными геометрическими центрами 456, 460, 464. Здесь промежуточный элемент 454 принадлежит второй группе 432; однако, если в настоящем примере предполагается, что все элементы одинакового размера, любой элемент из группы, отличной от первой группы 428, может быть выбран взамен. То же самое значение минимального расстояния 452 применяется ко всем парам элементов первой группы 428.
Несмежность для некоторых или большинства пар элементов из группы может быть больше, чем минимальная степень для этой группы. Это имеет место в настоящем примере в силу, например, пар 448, 468 элементов. Как показано на Фиг. 4В, расстояние 470 здесь измеряется между геометрическими центрами 460, 476 поверхностей 132 соответствующих элементов 448, 468. Гипотетически путем соответствующего сдвига вправо промежуточного элемента 466, его геометрический центр 482 и центры крайних элементов 448, 468 станут коллинеарными, показывая, что минимальное расстояние 452 является достаточным. В качестве альтернативы промежуточный элемент 483 может, гипотетически, быть сдвинут влево, чтобы также достичь коллинеарности геометрических центров. Минимальная степень несмежности наблюдается по всей группе, например, первой группе 428. Для второго состояния 408 пространственного расположения элементы данной группы попарно разделены по меньшей мере одним соответствующим промежуточным элементом из другой группы. Как и во всех состояниях 404, 408, 412 пространственного расположения, только одна группа 428, 432, 436, 440 второго состояния 408 пространственного расположения работает в любое заданное время.
Как упоминалось выше, визуализация выполняется параллельно по времени с использованием преобразовательных элементов текущей группы и последовательно по времени по группам. Таким образом, элементы 126 первой группы 428 обрабатываются одновременно в течение периода сбора данных. Одновременная обработка затем сдвигается после каждого периода к следующей группе, т.е. ко второй группе 432, затем к третьей группе 436 и затем к четвертой группе 440.
Вследствие интервала в массиве 124 между элементами той же группы во втором состоянии 408 пространственного расположения, акустические помехи значительно меньше, чем те, что произойдут в первом состоянии 404 пространственного расположения. В виде компромисса общее время сбора карты сосудов увеличено в четыре раза, потому что есть четыре группы 428, 432, 436, 440 в сравнении с единственной группой в первом состоянии 404 пространственного расположения. Тем не менее, это все еще составляет 1/8 времени, требуемого в случае последовательного сбора по уровням элементов, т.е. отдельно для каждых 32 элементов 126.
При некоторых условиях даже интервал, обеспечиваемый вторым состоянием 408 пространственного расположения, может привести к большим помехам, чем может быть допущено без ущерба клинической полезности и точности. Поэтому может понадобиться третье состояние 412 пространственного расположения с большим внутригрупповым межэлементным интервалом.
В третьем состоянии 412 пространственного расположения, показанном на Фиг.4С, минимальное расстояние для одной или более пар элементов 126 текущей группы является достаточным для того, чтобы позволить некоторым двум элементам другой одной или более групп вместе поместиться внутри пары при условии коллинеарности соответствующих геометрических центров. Так, например, два элемента 484, 486 поместятся между парой 488, 490, причем каждый элемент пары принадлежит той же группе, которая является первой группой для третьего состояния 412 пространственного расположения. Расстояние между парой 488, 490 элементов является минимальным расстоянием, т.е. минимальной ненулевой степенью межэлементной несмежности между элементами первой группы третьего состояния 412 пространственного расположения. Кроме того, два элемента 492, 494 помещаются между парой 486, 496 элементов той же группы, которая здесь называется третьей группой; хотя здесь промежуточные элементы гипотетически должны требовать сдвига, т.е. левого или правого соответственно, для приведения всех четырех геометрических центров в соответствие. Соответственно, как показано на Фиг.4С, расстояние между парой 486, 496 элементов больше минимального расстояния.
Высшая степень межэлементной несмежности для третьего состояния 412 пространственного расположения в сравнении с первым и вторым состояниями 404, 408 пространственного расположения дополнительно смягчает или уменьшает вероятность любых акустических помех среди элементов 126. Имеется девять групп в третьем состоянии 412 пространственного расположения, что все еще предусматривает в сравнении с чисто последовательной общей схемой существенное улучшение общего времени сбора данных.
Из Фиг. 4В и 4С можно видеть, что группы являются поэлементно взаимоисключающими, т.е. элемент не принадлежит более чем одной группе данного состояния 404, 408, 412 пространственного расположения.
Видно также, что группы пространственно расположены по отношению друг к другу таким образом, чтобы взаимно поэлементно соединяться между собой. Их элементы 126 совместно образуют сетку. Соответственно, требуемое количество чистоты в допплеровском сигнале достигается, когда в то же самое время «полезная площадь» ультразвукового интерфейса эффективно управляется таким образом, чтобы быть повсюду функциональной. Хотя никакое состояние пространственного расположения в обсуждаемых выше вариантах осуществления не требует внутригруппового межэлементного разделения, которое превышает два элемента, такая повышенная несмежность может быть реализована, особенно в случае, если у массива относительно много элементов. При проектировании того, какие элементы 126 принадлежат каким группам 428, 432, 436, 440, критерий размещения элемента в соответствующей группе может быть основан на евклидовом расстоянии или комбинаторных алгоритмах, например, может быть использован алгоритм «по n», такой как AETG/Jenny™. Использование такого критерия в проектировании группировки может происходить до операции зондирования. Или это может происходить во время операции зондирования с тем, чтобы, например, обойти обнаруженную неисправность в элементе 126. Зонд может быть сконфигурирован для одного состояния 404, 408, 412 пространственного расположения или для перехода 498 между двумя или более состояниями.
В описанных выше вариантах осуществления элементы 126 находятся в двумерном матричном массиве 124, хотя массив может быть меньшей или большей размерности. Также массив не должен обязательно быть в матричной конфигурации.
И при этом также поверхности 132 элементов не ограничиваются конкретной формой или размером. В пределы предполагаемого объема изобретения также входит, что поверхности 132 элементов не обязательно должны быть одинакового размера в поперечном сечении. Таким образом, критерий достаточности для минимального межэлементного расстояния для группы может быть выполнен, даже если выбранный элемент 126 требует соответствия конкретной ориентации, т.е. промежуточного расположения.
В зонде 100 схема управления (не показана), служащая в качестве устройства по пункту 1, 19, 21 или 22 формулы, может принимать формы одной или более интегральных схем (ИС). Одна или более ИС в соответствии с пунктом 1, 19, 21 или 22 могут, в качестве альтернативы, быть сконфигурированы для установки в существующие устройства, такие как дуплексные ультразвуковые сканеры.
В более общем плане устройство по пунктам 1, 19, 21 или 22 может быть реализовано в виде одной или более интегральных схем, схемы управления для массива 124 или, в качестве дополнительного примера, устройства, такого как зонд 100, которое включает в себя схему управления и массив 124.
Сигнал для приведения в действие массива 124 в соответствии с методами, предложенными здесь, может быть образован посредством варьирования электрического тока, подаваемого на проволочный ввод к массиву или подаваемого к антенне для беспроводной передачи сигнала и приема зондом 100.
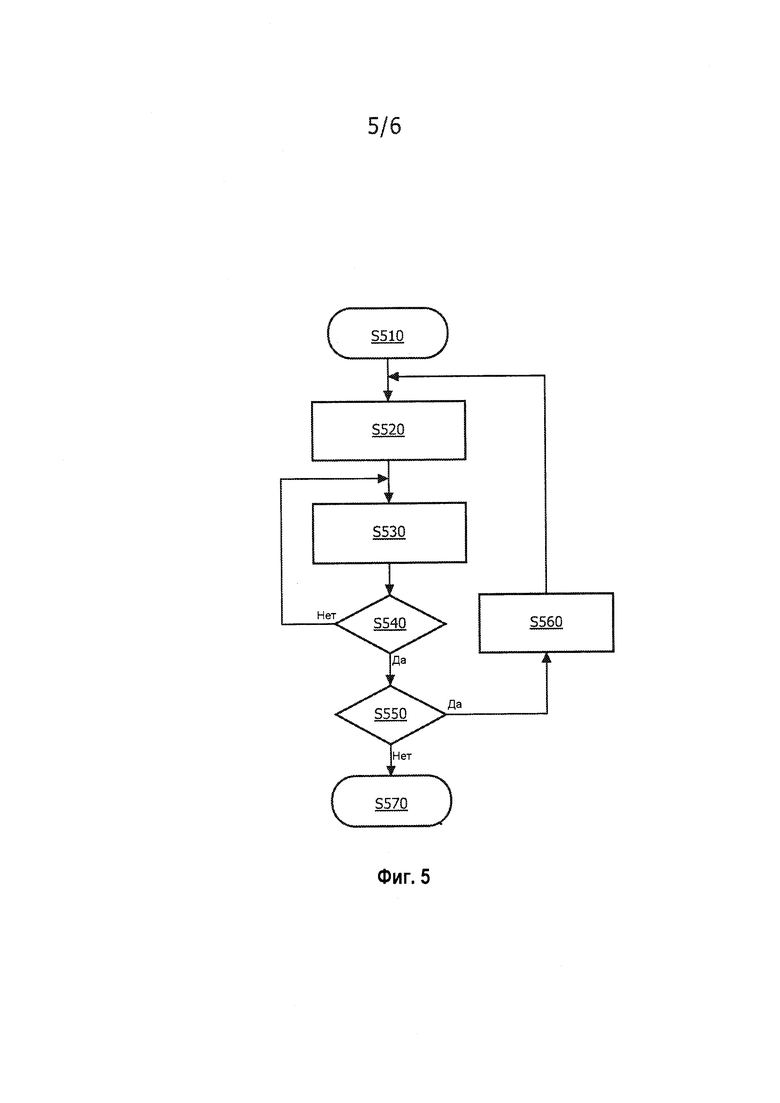
Фиг. 5 представляет собой простой пример схемы возбуждения. Для начала объемной визуализации (этап S510), элементы 126 текущей группы одновременно зажигаются (этап S520). Визуализация продолжается без совместного использования элементов 126 для фокусировки или направления луча (этап S530). Когда период сбора данных истекает (этап S540), если существует следующая группа для текущего состояния 404, 408, 412 пространственного расположения или только состояние пространственного расположения (этап S550), следующая группа становится текущей группой (этап S560), и обработка возвращается на этап S520. В противном случае, если следующей группы не существует (этап S550), объемная визуализация окончена (этап S570).
В некоторых вариантах реализации зонда 100 обеспечивается лишь одно состояние пространственного расположения. Если, например, зонд 100 должен быть использован на определенной части анатомии, размер и глубина сосуда могут быть известными или относительно постоянными. Конкретное состояние пространственного расположения может быть найдено эмпирически оптимальным.
В других вариантах реализации группировки 428, 432, 436, 440 элементов 126 могут варьироваться, что влечет за собой переход 498 к новому состоянию 404, 408, 412 пространственного расположения. Перегруппировка может быть автоматической, основываясь на предварительном сборе данных, указывающих на размер сосуда и/или глубину сосуда. Или это может произойти в ответ на приведение в действие клиницистом средств управления.
Фиг. 6 представляет собой пример инициализации состояния пространственного расположения устройства 100, для которого группировки 428, 432, 436, 440 могут варьироваться.
Клиницист вводит указание об общем времени сбора (этап S610), как часть инициализации на этапе S304. В качестве альтернативы ввод может указывать размер сосуда (этап S620) и/или глубину сосуда (этап S630), причем ввод просто выбирает целевой кровеносный сосуд для обследования на этапе S304 или вместо этого привлекает ввод значения для размера сосуда и/или глубины сосуда.
Исходя из входных данных, определяется соответствующая группировка (этап S640).
Если текущая группировка совпадает с определенной группировкой (этап S650), по умолчанию или в связи с последней использованной группировкой, начинается (этап S660) сбор объемных допплеровских сигналов, который совпадает с этапом S510.
В противном случае, если совпадения нет (этап S650), переход 498 осуществляется к состоянию 404, 408, 412 пространственного расположения, которое соответствует определенной группировке (этап S670). В одной конфигурации 32 преобразовательных элемента 126 соединены с 32 отдельными каналами передачи/приема. Только элементы 126 из текущей группы включены. Все остальные элементы массива 124 выключены. В качестве альтернативы число каналов в зонде 100 может быть сокращено до максимального количества элементов 126 по всем группам из групп 428, 432, 436, 440. Для второго состояния 408 пространственного расположения на Фиг. 4В каждая из групп 428, 432, 436, 440 имеет то же самое число элементов 126, т.е. восемь; так, максимальное число элементов 126 равняется восьми. Соединения восьми каналов с соответствующими элементами 126 переключаются с каждым переходом состояния 404, 408, 412 пространственного расположения. Это может быть достигнуто путем использования координатного переключателя, управляемого программируемой пользователем вентильной матрицей (FPGA). Эти устройства обсуждаются в принадлежащей Savord и др. патентной заявке US5997479 под названием «Акустические системы фазированного массива с внутригрупповыми процессорами» (Phased Array Acoustic Systems With Intra-Group Processors) и принадлежащей Garner и др. патентной заявке US2010/0277305 под названием «Отслеживание ресурсов беспроводного ультразвукового зонда» (Wireless Ultrasound Probe Asset Tracking). Программа управления в программном обеспечении или аппаратно-программном обеспечении, например, может настраивать соответствующие соединения между каналами и преобразовательными элементами 126 для данной группы в соответствии с предварительно загруженной таблицей поиска последовательности сканирования. После осуществления перехода 498 к определенному состоянию 404, 408, 412 пространственного расположения, сбор объемных данных может начинаться на этапе S510.
Новые схемы возбуждения, предложенные в настоящем описании, сокращают длительность обследования, что позволяет избежать ошибки от движения пациента или клинициста, которая, в противном случае, может произойти. Кроме того, количество каналов приема/передачи может быть сокращено до наибольшего числа элементов в любой группе. Это снижает затраты на производство, что также является одним из мотивирующих факторов создания относительно простого, автономного устройства 100 с относительно малым числом преобразовательных элементов 126. Посредством продуманного выбора схемы пространственного расположения, вредные эффекты перекрестных помех могут быть устранены или смягчены; заодно соединение групп элементов между собой делает эффективным использование «полезной площади» поверхности зонда, приводя к малому форм-фактору. Вследствие нереализации электронной фокусировки или направления устройство 100 дополнительно упрощено и сделано экономически эффективным. Автоматический допплеровский анализ снимает необходимость в отображаемом изображении и человеке, подготовленном для интерпретации такого отображения. Автоматический характер сохраняет надежность и может даже улучшить ее. Посредством ускорения обследования снимается нагрузка. Так как медицинское диагностическое устройство 100 является относительно недорогим, оно может быть сделано более широкодоступным.
Устройство визуализирует параллельно по времени с использованием преобразовательных элементов группы. В некоторых вариантах осуществления элементы берутся из текущей группы, а визуализация идет последовательно по времени по группам. Эти группы могут быть расположены в пространстве относительно друг друга так, чтобы взаимно соединяться между собой поэлементно. Визуализация может включать в себя объемную визуализацию. Устройство может быть сконфигурировано не для совместного использования любых элементов для фокусировки и направления луча, используемого при визуализации. Устройство может быть выполнено с возможностью перехода между состояниями пространственного расположения, причем по меньшей мере одно из которых характеризуется соответствующей минимальной ненулевой степенью внутригрупповой межэлементной несмежности, или может быть зафиксировано в одном состоянии пространственного расположения. Переход может быть автоматическим в ответ на входные данные, указывающие на размер кровеносного сосуда и/или глубину сосуда.
Хотя метод настоящего изобретения может быть преимущественно применен в предоставлении медицинских диагнозов для человека или животного, объем настоящего изобретения этим не ограничивается. В более широком смысле методы, описанные здесь, направлены на эффективное нахождение и подвергание анализу потока текучей среды сосудов в ткани тела in vivo, in vitro или ex vivo.
То, что предлагается в настоящем документе, относится к схемам возбуждения преобразовательных элементов для автоматизированного допплеровского устройства для отображения клинического диагноза, основываясь на результате анализа характеристик спектральных доплеровских форм волны. Применения включают в себя обследование картидной и почечной артерий, измерения ABI для выявления заболевания периферических артерий (PAD), транскраниальное обнаружение кровотечения при травме или других кровоизлияниях в дополнение к оцениванию состояния плода.
Хотя устройство было проиллюстрировано и подробно описано на чертежах и в вышеприведенном описании, такие иллюстрация и описание должны считаться иллюстративными или примерными и не ограничивающими; изобретение не ограничивается раскрытыми вариантами осуществления.
Например, в заданном состоянии пространственного расположения минимальное расстояние между геометрическими центрами может варьироваться по группам. Также, хотя новые схемы возбуждения описаны для двумерного массива преобразователей, массив может быть многомерным или в частном геометрическом расположении.
Другие вариации описанных вариантов осуществления могут быть поняты и осуществлены специалистами в данной области при осуществлении заявленного изобретения на основании изучения чертежей, описания и прилагаемой формулы изобретения. В формуле изобретения слово «содержащий» не исключает другие элементы или этапы, и перечисление элементов или этапов в единственном числе не исключает их множества. Любые ссылочные позиции в формуле изобретения не следует истолковывать как ограничивающие объем изобретения.
Компьютерная программа может быть сохранена моментально, временно или на более продолжительный период времени на подходящем машиночитаемом носителе, таком как оптический носитель данных или твердотельный носитель данных. Такой носитель является постоянным только в том смысле, чтобы не быть временным, распространяющимся сигналом, но включает в себя другие формы машиночитаемых носителей, таких как регистр памяти, кэш-память процессора и ОЗУ.
Один процессор или другой блок может выполнять функции нескольких элементов, перечисленных в формуле изобретения. Тот факт, что определенные меры изложены во взаимно различных зависимых пунктах формулы изобретения, не означает, что комбинация этих мер не может быть использована с преимуществом.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЗИРОВАННЫЙ ВЫБОР СЕРДЕЧНЫХ ЦИКЛОВ НА ОСНОВЕ ДОПЛЕРОВСКОГО СМЕЩЕНИЯ | 2012 |
|
RU2674241C2 |
| АВТОМАТИЗИРОВАННОЕ ИЗМЕРЕНИЕ ДОПЛЕРОВСКОЙ СКОРОСТИ С ИСПОЛЬЗОВАНИЕМ ДЕШЕВОГО ПРЕОБРАЗОВАТЕЛЯ | 2011 |
|
RU2607510C2 |
| УЛЬТРАЗВУКОВАЯ СИСТЕМА С ДИНАМИЧЕСКИ АВТОМАТИЗИРОВАННОЙ УСТАНОВКОЙ ПАРАМЕТРОВ ПОТОКОВОЙ ДОППЛЕРОГРАФИИ ПРИ ДВИЖЕНИИ КОНТРОЛЬНОГО ОБЪЕМА | 2012 |
|
RU2610884C2 |
| УЛЬТРАЗВУКОВАЯ ЦВЕТОВАЯ КАРТА ПОТОКА ДЛЯ ИССЛЕДОВАНИЯ МИТРАЛЬНОЙ РЕГУРГИТАЦИИ | 2013 |
|
RU2652257C2 |
| УЛЬТРАЗВУКОВАЯ СИСТЕМА С АВТОМАТИЧЕСКОЙ УСТАНОВКОЙ ПАРАМЕТРОВ ДОПЛЕРОВСКОГО ПОТОКА | 2012 |
|
RU2606961C2 |
| АВТОМАТИЗИРОВАННАЯ ПОСЛЕДОВАТЕЛЬНОСТЬ ОПЕРАЦИЙ В ДВУХПЛОСКОСТНОМ РЕЖИМЕ PW ДЛЯ УЛЬТРАЗВУКОВОЙ ОЦЕНКИ СТЕНОЗА | 2013 |
|
RU2633915C2 |
| УЛЬТРАЗВУКОВОЕ ИЗМЕРЕНИЕ ОБЪЕМНОГО ПОТОКА ДЛЯ ПЛАНИРОВАНИЯ АБЛЯЦИИ | 2013 |
|
RU2651875C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ АВТОМАТИЗИРОВАННОЙ ДОПЛЕРОВСКОЙ ОЦЕНКИ УГЛА И СКОРОСТИ ПОТОКА | 2012 |
|
RU2623301C2 |
| НАВЕДЕНИЕ НА ЦЕЛЕВОЙ ВИД ПО ОБРАТНОЙ СВЯЗИ ПРИ ПОЛУЧЕНИИ УЛЬТРАЗВУКОВЫХ ДАННЫХ | 2014 |
|
RU2683720C2 |
| УСТРОЙСТВО, СИСТЕМА И СПОСОБ ДЛЯ ВИЗУАЛИЗАЦИИ И ЛЕЧЕНИЯ С ИСПОЛЬЗОВАНИЕМ ОПТИЧЕСКОГО ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ | 2011 |
|
RU2589625C2 |

Группа изобретений относится к медицине. Группа изобретений включает устройство, постоянный машиночитаемый носитель и способ работы устройства ультразвуковой визуализации. Устройство содержит массив преобразовательных элементов, распределенных на множество групп для работы по группам, и процессор, сконфигурированный для управления работой массива преобразовательных элементов. Управляют посредством процессора работой массива преобразовательных элементов для осуществления визуализации. Используют упомянутый массив параллельно и последовательно по времени с использованием преобразовательных элементов текущей одной из упомянутых групп из множества преобразовательных элементов. Визуализация выполняется поэлементно независимо. Группы из множества преобразовательных элементов попарно расположены в пространстве по отношению друг к другу таким образом, чтобы поэлементно соединяться друг с другом. При этом каждая группа из множества преобразовательных элементов содержит только несмежные преобразовательные элементы, сгруппированные в соответствии с состоянием пространственного расположения, в котором для всех пар преобразовательных элементов первой группы один или более преобразовательных элементов из одной или более других групп находятся между двумя преобразовательными элементами пары преобразовательных элементов. Каждый преобразовательный элемент из массива преобразовательных элементов имеет поверхность с геометрическим центром. Преобразовательные элементы из массива преобразовательных элементов расположены так, что линия, проходящая через геометрические центры, по меньшей мере, некоторых из преобразовательных элементов одной группы не полностью окружает преобразовательные элементы любой другой группы. Группа изобретений позволяет автоматизированно, просто, с минимумом помех осуществить ультразвуковую визуализацию за счет осуществления визуализации нефазированным способом и независимо, а также за счет распределения преобразовательных элементов по группам из множества несмежных преобразовательных элементов и за счет того, что линия, проходящая через геометрические центры, по меньшей мере, некоторых из преобразовательных элементов одной группы не полностью окружает преобразовательные элементы любой другой группы. 3 н. и 14 з.п. ф-лы, 9 ил.
1. Устройство ультразвуковой визуализации, содержащее:
массив преобразовательных элементов, распределенных на множество групп для работы по группам; и
процессор, сконфигурированный исходя из упомянутого распределения для управления работой массива преобразовательных элементов, чтобы осуществлять визуализацию параллельно по времени с использованием преобразовательных элементов из массива преобразовательных элементов текущей группы из упомянутого множества групп и последовательно по времени по группам, причем множество групп пространственно расположено по отношению друг к другу таким образом, чтобы поэлементно соединяться друг с другом, при этом каждая из упомянутого множества групп содержит только несмежные преобразовательные элементы, распределенные в соответствии с состоянием пространственного расположения, в котором для всех пар преобразовательных элементов первой группы из множества групп один или более преобразовательных элементов одной или более других групп из множества групп находятся между двумя преобразовательными элементами пары преобразовательных элементов, и каждый преобразовательный элемент из массива преобразовательных элементов имеет поверхность с геометрическим центром, при этом преобразовательные элементы из массива преобразовательных элементов расположены таким образом, что линия, проходящая через геометрические центры, по меньшей мере, некоторых из преобразовательных элементов одной группы из множества групп не полностью окружает преобразовательные элементы любой другой группы в множестве групп;
при этом процессор сконфигурирован для управления работой массива для осуществления визуализации параллельно по времени путем управления работой упомянутых преобразовательных элементов упомянутой текущей группы из упомянутого множества групп с тем, чтобы нефазированным способом осуществлять визуализацию независимо.
2. Устройство по п. 1, сконфигурированное для получения медицинского изображения и для визуализации посредством упомянутой работы, чтобы сформировать карту кровеносных сосудов, причем упомянутый массив преобразовательных элементов содержит нефазированную решетку для упомянутой работы, причем упомянутый процессор сконфигурирован, чтобы не использовать совместно любые из упомянутых преобразовательных элементов упомянутой одной или более других групп из множества групп для фокусировки и направления луча, используемого в упомянутой визуализации.
3. Устройство по п. 1, в котором процессор сконфигурирован для обеспечения визуализации посредством преобразовательного элемента упомянутой текущей группы, причем упомянутый процессор дополнительно сконфигурирован для: обнаружения кровотока в пикселе на основе допплеровской информации, принятой из преобразовательного элемента, причем пиксель пространственно соответствует преобразовательному элементу; и исходя из результата упомянутого кровотока принятия решения в пользу наличия или неналичия кровеносного сосуда по отношению к упомянутому пикселю.
4. Устройство по п. 1, в котором упомянутый процессор дополнительно сконфигурирован для изменения группировки преобразовательных элементов.
5. Устройство по п. 4, в котором упомянутый процессор дополнительно сконфигурирован для анализа визуализации и для выполнения упомянутого изменения, основываясь на результате упомянутого анализа.
6. Устройство по п. 4, в котором упомянутое изменение содержит переход между одним и другим из по меньшей мере двух состояний пространственного расположения из множества состояний пространственного расположения, по меньшей мере одно из которых характеризуются соответствующей минимальной, ненулевой степенью межэлементной несмежности между преобразовательными элементами группы.
7. Устройство по п. 6, в котором процессор сконфигурирован для получения медицинского изображения и для упомянутого перехода автоматически в ответ на ввод, указывающий по меньшей мере одно из размера кровеносного сосуда и глубины кровеносного сосуда.
8. Устройство по п. 1, в котором упомянутое расстояние между парой преобразовательных элементов обеспечивает минимальную, ненулевую степень межэлементной несмежности между преобразовательными элементами упомянутой текущей группы, при этом упомянутый минимум представляет собой минимальное расстояние между упомянутыми геометрическими центрами.
9. Устройство по п. 1, в котором упомянутое множество групп является поэлементно взаимоисключающим.
10. Устройство по п. 1, в котором визуализация содержит медицинскую визуализацию, причем упомянутое устройство сконфигурировано для упомянутой работы, основываясь на упомянутом распределении между более чем одной из упомянутого множества групп.
11. Устройство по п. 1, в котором массив преобразовательных элементов и процессор содержатся внутри корпуса ручного, автономного, диагностического устройства, содержащего упомянутое устройство.
12. Устройство по п. 11, дополнительно содержащее один или более индикаторов, расположенных в корпусе, причем один или более индикаторов сконфигурированы для обеспечения индикатора обнаружения допплеровской мощности, индикатора сбора данных о сердцебиении плода, индикатора сбора данных о сердцебиении матери, индикатора нормального кровотока, индикатора анормального кровотока или их сочетания.
13. Устройство по п. 1, в котором процессор дополнительно сконфигурирован для выбора состояния пространственного расположения из множества состояний пространственного расположения массива преобразовательных элементов, включающего в себя группы из множества групп, причем множество состояний пространственного расположения включает в себя другое состояние пространственного расположения, в котором по меньшей мере три группы преобразовательных элементов расположены таким образом, что для всех пар преобразовательных элементов первой группы расстояние между двумя преобразовательными элементами каждой из пар преобразовательных элементов первой группы позволяет двум преобразовательным элементам других групп из по меньшей мере трех групп располагаться между двумя преобразовательными элементами первой группы.
14. Постоянный машиночитаемый носитель, содержащий компьютерные инструкции для работы устройства ультразвуковой визуализации, содержащего массив преобразовательных элементов, причем преобразовательные элементы из массива преобразовательных элементов сгруппированы по группам из множества преобразовательных элементов из упомянутых преобразовательных элементов, причем упомянутые инструкции при выполнении процессором конфигурируют процессор выполнять этапы, включающие в себя:
управление работой упомянутого массива преобразовательных элементов для осуществления визуализации посредством упомянутого массива преобразовательных элементов параллельно по времени с использованием преобразовательных элементов текущей одной из упомянутых групп из множества преобразовательных элементов из упомянутых преобразовательных элементов и последовательно по времени по группам, причем упомянутая визуализация выполняется поэлементно независимо, причем группы из множества преобразовательных элементов из упомянутых преобразовательных элементов попарно расположены в пространстве по отношению друг к другу таким образом, чтобы поэлементно соединяться друг с другом, при этом каждая из упомянутых групп из множества преобразовательных элементов из упомянутых преобразовательных элементов содержит только несмежные преобразовательные элементы, сгруппированные в соответствии с состоянием пространственного расположения, в котором для всех пар преобразовательных элементов первой группы из групп из множества преобразовательных элементов из упомянутых преобразовательных элементов один или более преобразовательных элементов из одной или более других групп из множества преобразовательных элементов из упомянутых преобразовательных элементов находятся между двумя преобразовательными элементами пары преобразовательных элементов, и каждый преобразовательный элемент из массива преобразовательных элементов имеет поверхность с геометрическим центром, при этом преобразовательные элементы из массива преобразовательных элементов расположены таким образом, что линия, проходящая через геометрические центры, по меньшей мере, некоторых из преобразовательных элементов одной группы из групп из множества преобразовательных элементов из упомянутых преобразовательных элементов не полностью окружает преобразовательные элементы любой другой группы в группах множества преобразовательных элементов из упомянутых преобразовательных элементов.
15. Постоянный машиночитаемый носитель по п. 14, дополнительно содержащий компьютерные инструкции для выбора состояния пространственного расположения из множества состояний пространственного расположения массива преобразовательных элементов, включающего в себя группы из множества преобразовательных элементов из упомянутых преобразовательных элементов, причем множество состояний пространственного расположения включает в себя состояние пространственного расположения, в котором по меньшей мере три группы преобразовательных элементов расположены таким образом, что для всех пар преобразовательных элементов первой группы расстояние между двумя преобразовательными элементами каждой из пар преобразовательных элементов первой группы позволяет двум преобразовательным элементам других групп из по меньшей мере трех групп располагаться между двумя преобразовательными элементами первой группы.
16. Способ работы устройства ультразвуковой визуализации, содержащего массив преобразовательных элементов, причем преобразовательные элементы из массива преобразовательных элементов сгруппированы по группам из множества преобразовательных элементов из упомянутых преобразовательных элементов, при этом способ содержит этапы, включающие в себя:
управление посредством процессора работой упомянутого массива преобразовательных элементов для осуществления визуализации, используя упомянутый массив, параллельно по времени с использованием преобразовательных элементов текущей одной из упомянутых групп из множества преобразовательных элементов из упомянутых преобразовательных элементов и последовательно по времени по группам, причем упомянутая визуализация выполняется поэлементно независимо, причем группы из множества преобразовательных элементов из упомянутых преобразовательных элементов попарно расположены в пространстве по отношению друг к другу таким образом, чтобы поэлементно соединяться друг с другом, при этом каждая из упомянутых групп из множества преобразовательных элементов из упомянутых преобразовательных элементов содержит только несмежные преобразовательные элементы, сгруппированные в соответствии с состоянием пространственного расположения, в котором для всех пар преобразовательных элементов первой группы из групп из множества преобразовательных элементов из упомянутых преобразовательных элементов один или более преобразовательных элементов из одной или более других групп из множества преобразовательных элементов из упомянутых преобразовательных элементов находятся между двумя преобразовательными элементами пары преобразовательных элементов, и каждый преобразовательный элемент из массива преобразовательных элементов имеет поверхность с геометрическим центром, при этом преобразовательные элементы из массива преобразовательных элементов расположены таким образом, что линия, проходящая через геометрические центры, по меньшей мере, некоторых из преобразовательных элементов одной группы из групп из множества преобразовательных элементов из упомянутых преобразовательных элементов не полностью окружает преобразовательные элементы любой другой группы в группах из множества преобразовательных элементов из упомянутых преобразовательных элементов.
17. Способ по п. 16, дополнительно содержащий этап выбора посредством процессора состояния пространственного расположения из множества состояний пространственного расположения массива преобразовательных элементов, включающего в себя группы из множества преобразовательных элементов из упомянутых преобразовательных элементов, причем множество состояний пространственного расположения включает в себя состояние пространственного расположения, в котором по меньшей мере три группы преобразовательных элементов расположены таким образом, что для всех пар преобразовательных элементов первой группы расстояние между двумя преобразовательными элементами каждой из пар преобразовательных элементов первой группы позволяет двум преобразовательным элементам других групп из по меньшей мере трех групп располагаться между двумя преобразовательными элементами первой группы.
| US 2008114239 A1, 15.05.2008 | |||
| 0 |
|
SU80105A1 | |
| US 4530363 A, 23.07.1985 | |||
| US 4733562 A, 29.03.1988 | |||
| US 20100168581 A1, 01.07.2010 | |||
| ДЕНИСОВ А.А | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Автореф | |||
| дисс | |||
| Виндзор | |||
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| VELICHKO A | |||
| Guided wave arrays for high resolution inspection | |||
| J Acoust Soc Am | |||
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |

