Область техники, к которой относится изобретение
Изобретение относится к электронным системам для транспортных средств, в частности к картографическим системам.
Уровень техники
В настоящее время известны основанные на GPS-технологиях навигационные системы для транспортных средств, предоставляющие навигацию по маршруту от пункта отправления до пункта назначения. Также известны основанные на GPS-технологиях системы, которые могут предоставить водителю предварительную информацию о выбранном маршруте на карте, например, ограничения скорости, рельеф местности и другие характеристики дороги. Такие системы обычно хранят или загружают определенный набор данных, связанных с наиболее часто используемыми маршрутами по дорогам общего пользования. Эти данные или «карты» обычно создают и предоставляют сторонние поставщики. Такие системы требуют использования большого количества данных, поскольку они изготавливаются серийно для широкого потребления и обычно включают в себя картографические данные для большого количества маршрутов для большой географической местности, например, США, даже несмотря на то, что отдельный водитель вряд ли когда-либо воспользуется всеми данными такой системы.
Известные системы после загрузки или приобретения у поставщика обычно являются «статическими», т.е. они предоставляют водителю предварительную информацию о маршрутах, известную на момент передачи картографических данных водителю от поставщика. Они не вносят изменения в известные маршруты и не могут записывать новые маршруты, которые не были ранее включены поставщиком карт. С целью добавления новых и изменения известных маршрутов поставщики обычно периодически предоставляют пользователю платные обновления картографических данных. Однако такие обновления могут быть дорогостоящими, труднодоступными и несвоевременными. Кроме того, известные системы не приспосабливаются к стилю вождения каждого водителя. В связи с этим известные системы являются непригодными в ситуациях, когда определенные карты недоступны (например, когда требуемый маршрут не проходит по дорогам общего пользования), либо когда поставщик еще не выпустил обновления для новой дороги. Кроме того, известные системы не взаимодействуют с транспортным средством для настройки ездовых характеристик транспортного средства в зависимости от стиля вождения конкретного водителя.
Раскрытие изобретения
В настоящем изобретении предложена картографическая система транспортного средства, которая позволяет обновлять и дополнять имеющиеся маршруты на основании истории передвижений транспортного средства. Картографическая система включает в себя бортовое электронное устройство хранения данных, GPS-приемник и электронный контроллер. Электронный контроллер выполнен с возможностью получения от GPS-приемника GPS-данных, соответствующих текущему местоположению транспортного средства. Электронный контроллер также может сохранять полученные GPS-данные на электронном запоминающем устройстве, если местоположение транспортного средства находится за пределами предусмотренной зоны покрытия карты.
Представлены система и способ построения и использования локализованной и адаптивной карты маршрута транспортного средства. Установленная в транспортном средстве система периодически принимает данные о его местоположении от спутников GPS-системы и выборочно сохраняет некоторые из этих данных на основании определенных критериев. Также могут быть локально сохранены и другие характеристики физического маршрута, а также данные, связанные с эксплуатационными параметрами транспортного средства по мере его следования по маршруту. Таким образом, в относительно малой области памяти электронного запоминающего устройства локально могут быть сохранены картографические данные и эксплуатационные характеристики транспортного средства, связанные с определенным маршрутом, по которому движется это транспортное средство. Локально сохраненные картографические и эксплуатационные данные могут соответствовать транспортному средству, на котором производилась запись данных, либо могут соответствовать выбранным водителям, управляющим данным транспортным средством. Локально сохраненные картографические данные используются в последующих поездках тем же самым транспортным средством для предварительного просмотра предполагаемого маршрута. Локально сохраненные эксплуатационные данные транспортного средства используются при последующих поездках для настройки работы транспортного средства на основании накопленных данных о стиле вождения на определенных участках маршрута. Описанный способ не зависит от заранее записанных карт и не требует наличия канала связи для получения данных извне (хотя и не исключает возможное использование или взаимодействие с такими заранее записанными картами и/или каналами связи). Вместо этого описанная система запрашивает данные о местоположении и эксплуатационные данные транспортного средства, относящиеся к конкретным маршрутам транспортного средства, а также использует такие специальные данные в последующих поездках по данному маршруту.
Краткое описание чертежей
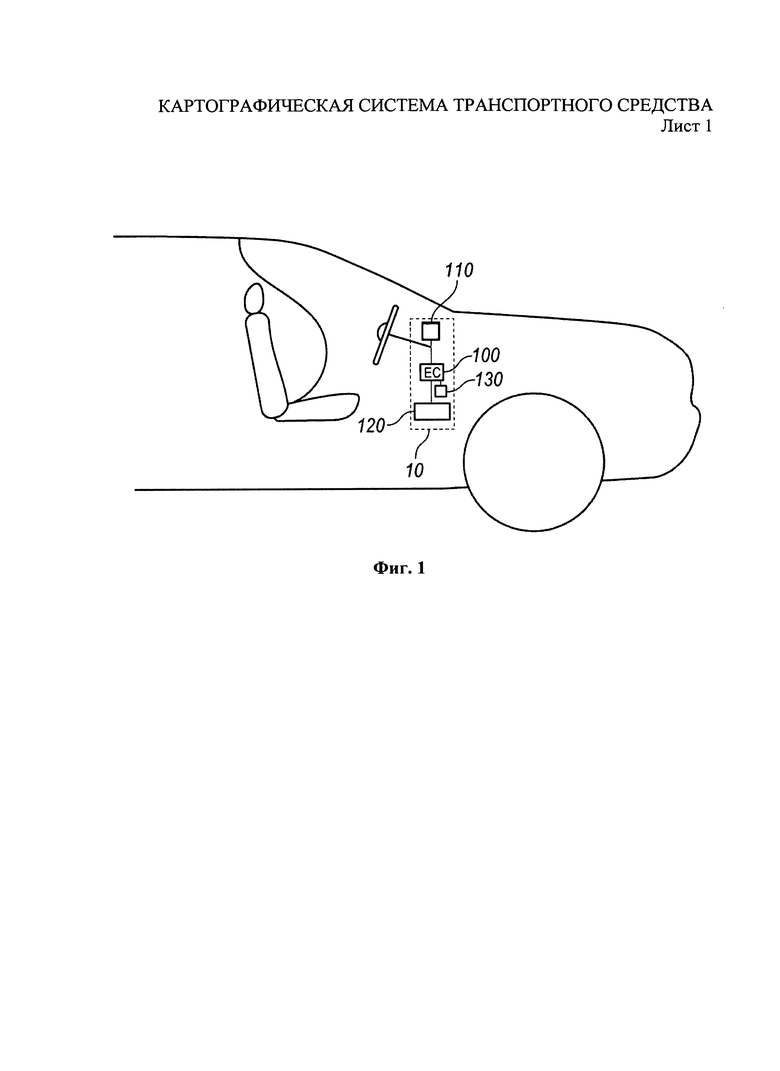
На Фиг.1 изображена общая схема компонентов картографической системы транспортного средства и примерное изображение транспортного средства, в котором может быть применена такая картографическая система.
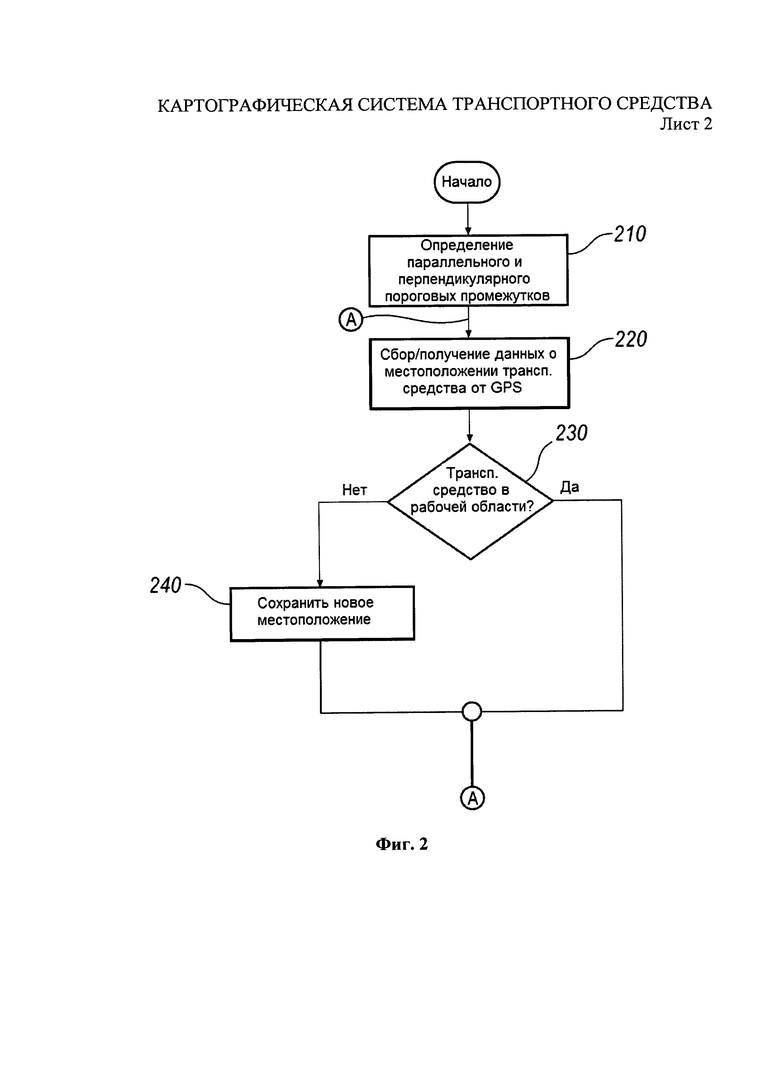
На Фиг.2 представлена логическая схема процесса, демонстрирующая этапы процедуры выборочного сохранения данных о местоположении для построения карты маршрута.
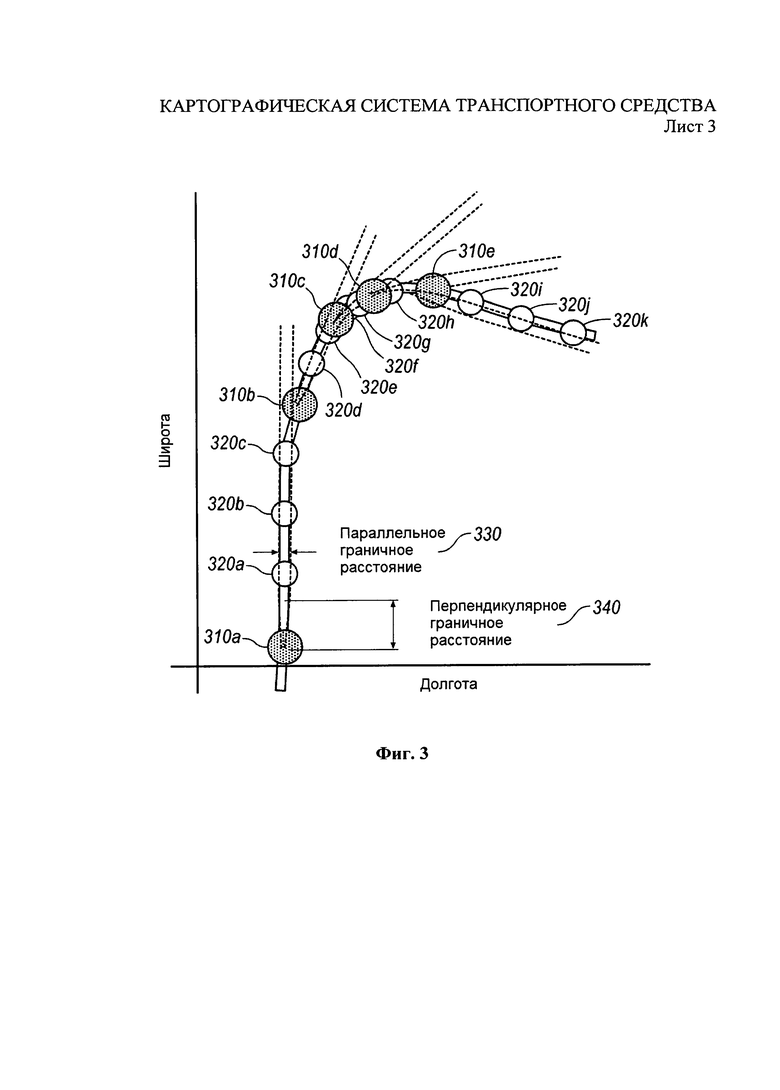
На Фиг.3 представлена иллюстрация принципов процесса, показанного на Фиг.2.
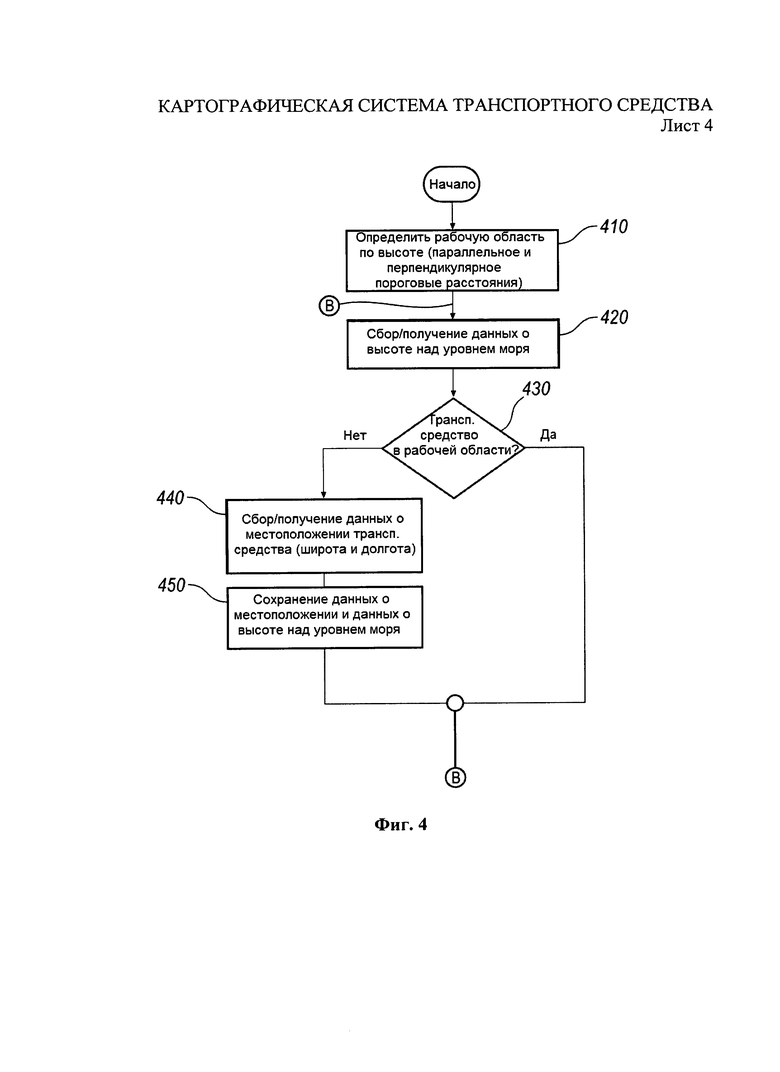
На Фиг.4 представлена схема процесса, демонстрирующая этапы процедуры выборочного сохранения данных о высоте над уровнем моря для уточнения карты маршрута.
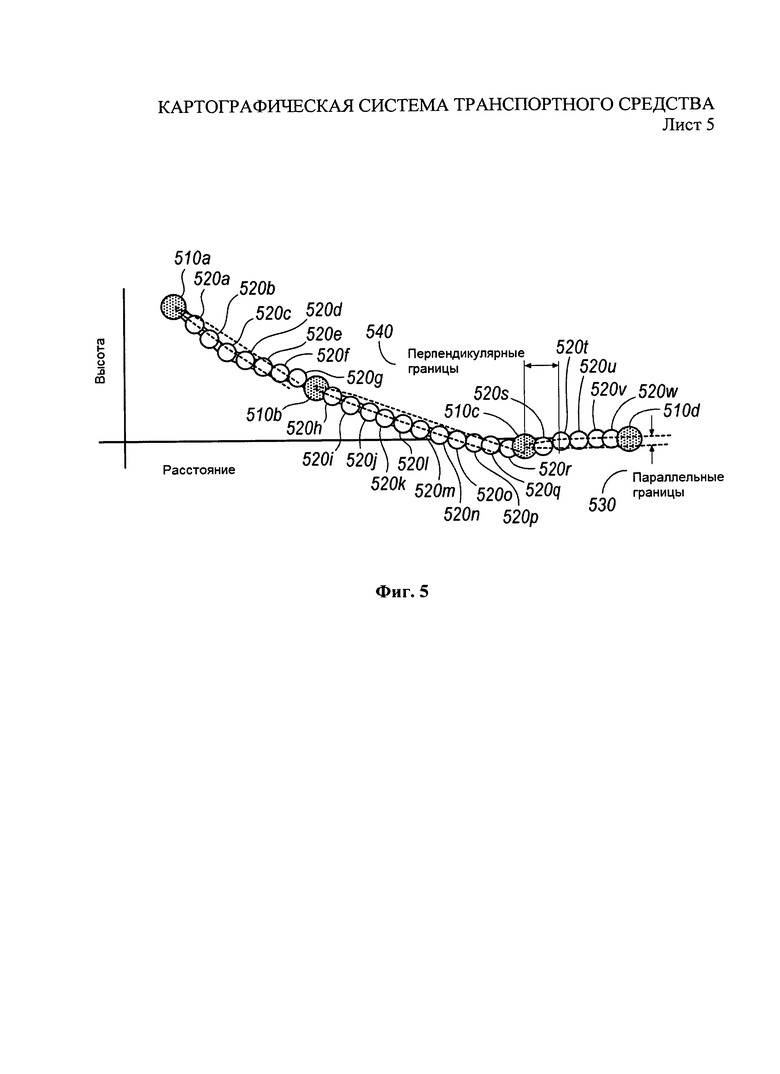
На Фиг.5 представлена иллюстрация принципов процесса, изображенного на Фиг.4.
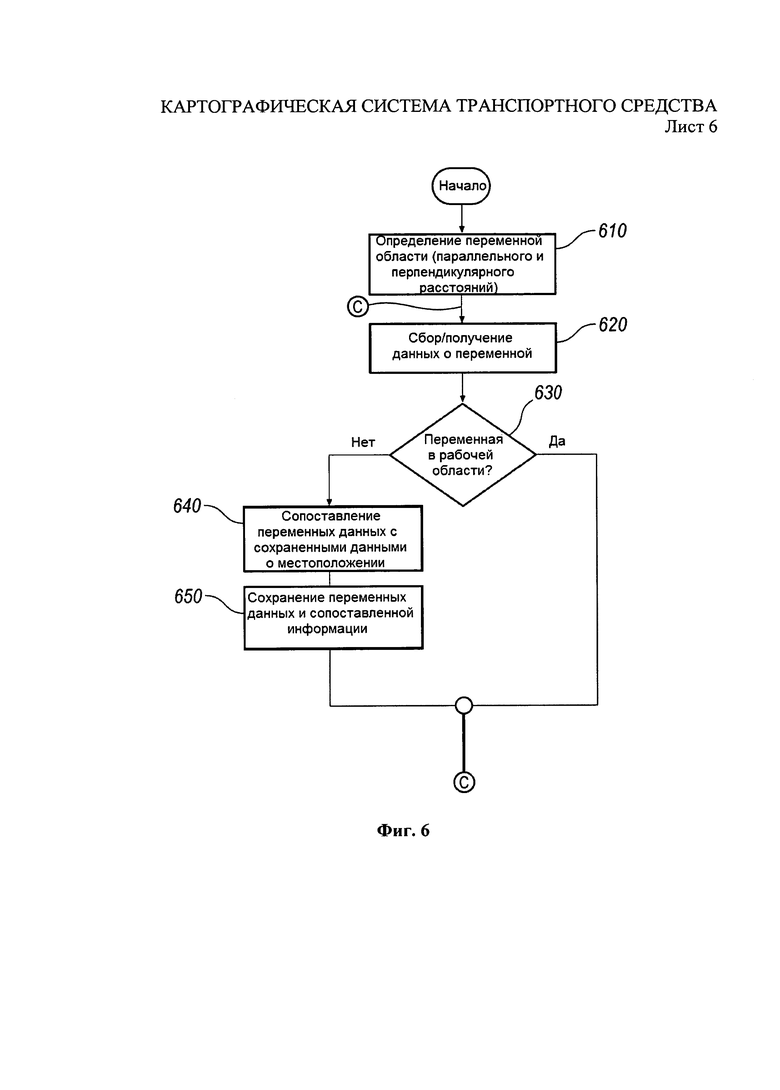
На Фиг.6 представлена схема процесса, демонстрирующая этапы выборочного сохранения данных, соответствующих различным представляющим интерес параметрам маршрута.
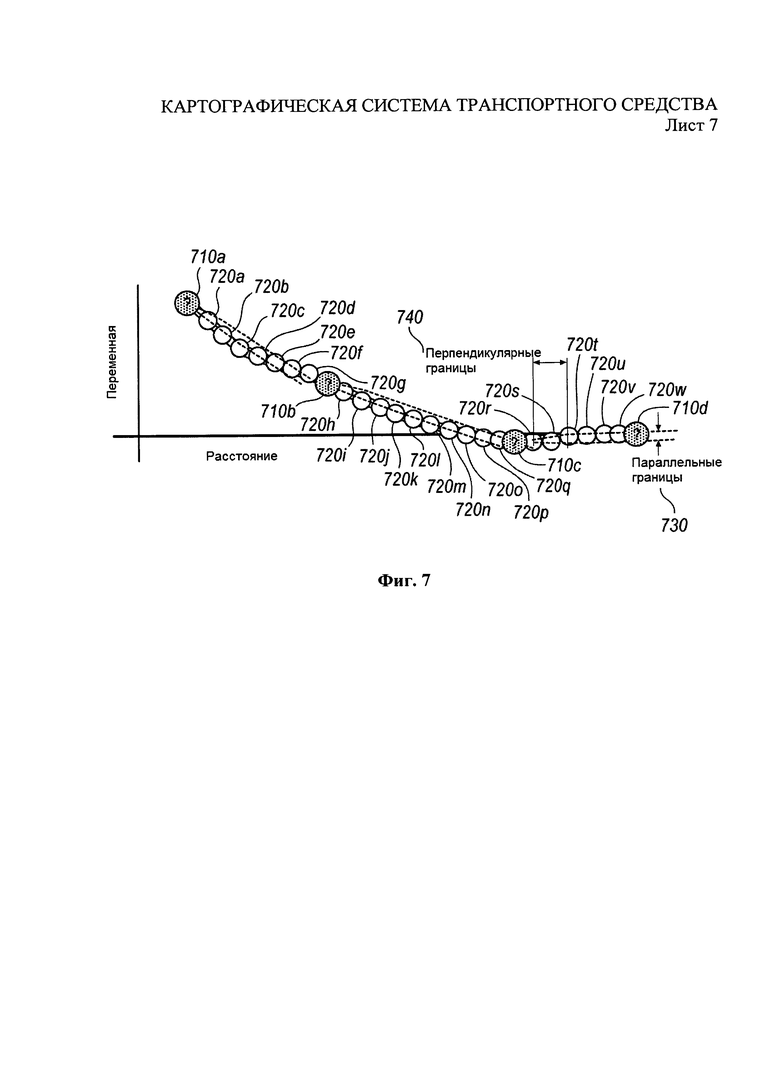
На Фиг.7 представлена иллюстрация принципов процесса, изображенного на Фиг.6.
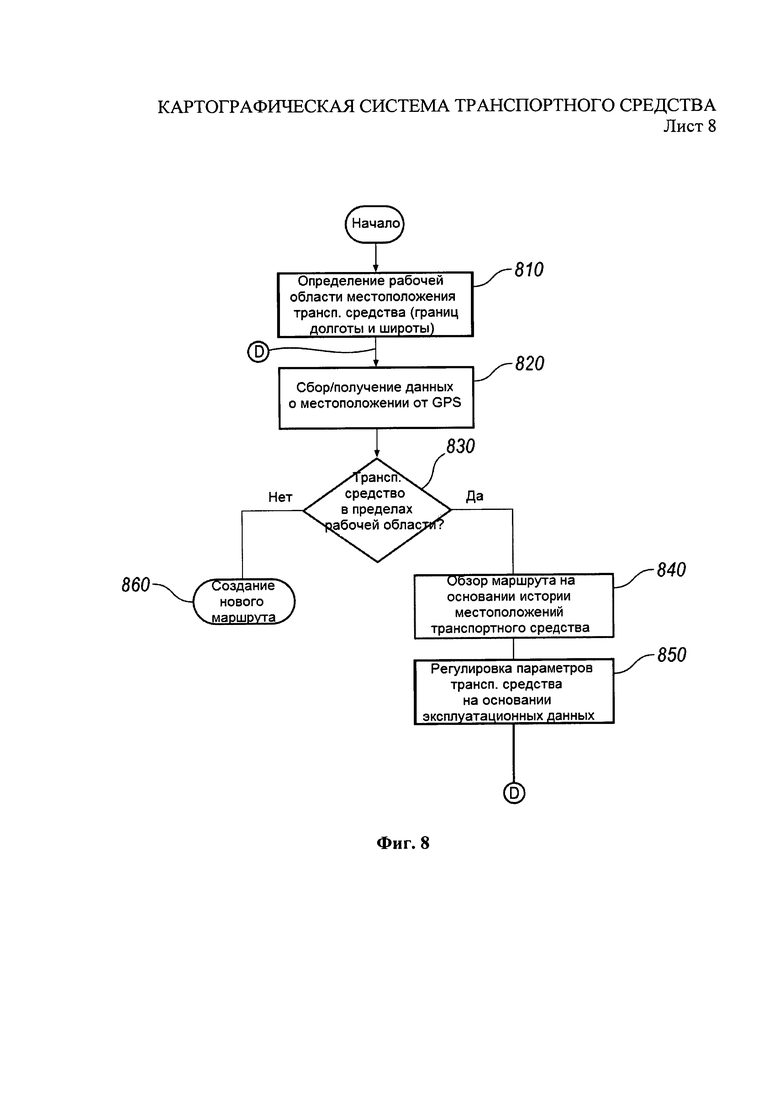
На Фиг.8 представлена схема процесса, демонстрирующая этапы процедуры сопоставления текущего маршрута с ранее сохраненным маршрутом транспортного средства, а также использования данных, связанных с ранее сохраненным маршрутом.
Осуществление изобретения
На Фиг.1 изображен пример транспортного средства 10, в котором может быть использована предложенная система. Транспортное средство может содержать различные известные из уровня техники датчики (не показаны) для оценки и изменения эксплуатационных параметров транспортного средства. Также транспортное средство содержит локализованную картографическую систему 10, описание которой приведено далее. Локализованная картографическая система 10 включает в себя, по крайней мере, электронный контроллер 100, который имеет канал связи, по крайней мере, с памятью 110, устройством хранения 120 и GPS-приемником 130. Контроллер 100 принимает данные от GPS-приемника 130 и различных датчиков транспортного средства. Контроллер использует эти данные для построения изученной карты маршрутов, пройденных транспортным средством, и для сопоставления различных данных с изученными маршрутами, используя описанные далее способы и алгоритмы.
На Фиг.2 представлена схема процесса, демонстрирующая основные функциональные этапы алгоритма, хранящегося в устройстве хранения 110 и выполняемого контроллером 100, для запроса данных о местоположении и построения в режиме реального времени карты нового маршрута, по которому движется транспортное средство. На Фиг.3 дано общее графическое изображение способа с Фиг.2. На Фиг.3 кружками представлены последующие географические местоположения на местности в координатной сетке «долгота/широта» (высота над уровнем моря не показана). Большие закрашенные кружки 310a-310e и небольшие закрашенные кружки 320a-320k соответствуют точкам, в которых производится периодическое сопоставление географического местоположения транспортного средства (т.е. запрос у спутников GPS-данных о местоположении транспортного средства по долготе и широте). Данные долготы/широты, связанные с большими закрашенными кружками 310a-320e, хранятся системой в устройстве хранения 120 для последующего использования при прохождении транспортным средством данного маршрута в будущем. Данные, связанные с небольшими кружками 320a-320k, игнорируются. Большие кружки 310a-310e представляют собой «координатные узлы», которые позже используются для определения ранее пройденного маршрута объединения этих координатных узлов 310a-310e друг с другом.
Координатный узел 310a представляет первую выборку данных о местоположении транспортного средства на новом маршруте. Таким образом, система сохраняет данные о местоположении, связанные с координатным узлом 310, в качестве «головной» или начальной точки маршрута. Затем система периодически производит запрос или выборку данных долготы/широты, связанных с последующим местоположением транспортного средства и принятых GPS-приемником 130 от спутников системы GPS. Система определяет необходимость сохранения запрашиваемых данных о местоположении в качестве координатных узлов (например, координатные узлы 310b-310e), когда эти данные выходят за пределы рабочей области, заключенной между параллельными и перпендикулярными граничными линиями.
Пороговое параллельное расстояние 330 является расстоянием между двумя воображаемыми продольными линиями, расположенными по бокам от транспортного средства, при этом транспортное средство расположено на одинаковом расстоянии от них. Направление параллельных линий в любой заданный момент определяется текущим направлением движения транспортного средства. Например, пороговое параллельное расстояние 330, изображенное на Фиг.3, ориентировано вертикально, поскольку направление движения транспортного средства на графике соответствует вертикальному направлению. Величина порогового параллельного расстояния 330 (расстояние между пунктирными линиями) может представлять собой заранее установленное значение или программируемое переменное значение. Пороговое параллельное расстояние 330 может быть практически любым (например, 4 фута, 6 футов, 10 футов и т.д.). Пороговое перпендикулярное расстояние 340 является расстоянием (заранее установленным или переменным) между воображаемыми поперечными линиями, взятым в направлении движения транспортного средства. Для транспортного средства, движущегося вперед, пороговое перпендикулярное расстояние 340 обычно отсчитывается от сохраненного координатного узла вперед по направлению движения транспортного средства. Для транспортного средства, движущегося назад, пороговое перпендикулярное расстояние 340 может отсчитываться от сохраненного координатного узла назад по направлению движения транспортного средства. Величина порогового перпендикулярного расстояния 340 может быть практически любой, например, 10 футов, 15 футов, 20 футов и т.д. Пороговые параллельное и перпендикулярное расстояния задают рабочую область вокруг движущегося транспортного средства. Запрашиваемые данные о местоположении игнорируются, когда транспортное средство находится в пределах рабочей области (в пределах параллельного и перпендикулярного пороговых расстояний), что изображено на Фиг.3 небольшими кружками 320a-k. Однако когда транспортное средство выходит за пределы рабочей области (выходит за пределы параллельного и перпендикулярного пороговых расстояний), система сохраняет текущие данные о местоположении в устройство хранения 120 в качестве координатного узла 310. В таком случае данные о местоположении транспортного средства сохраняются в качестве координатного узла 310 каждый раз, когда транспортное средство отклоняется от текущего направления на заданное расстояние, что определяется выходом за пределы порогового параллельного расстояния 330. Данные о местоположении транспортного средства также сохраняются в виде координатного узла 310 каждый раз, когда транспортное средство продолжает двигаться в том же направлении (в пределах порогового параллельного расстояния) на заданном расстоянии, что определяется выходом за пределы порогового перпендикулярного расстояния 340. Сохраненные координатные узлы 310a-310e далее используются для определения маршрута, ранее пройденного данным транспортным средством, который может отображаться водителю на дисплее при следующей поездке по данному маршруту. Чем меньше рабочая область (т.е. чем больше параллельное и/или перпендикулярное пороговое расстояние), тем больше координатных узлов 310 будет сохранено и тем меньше будет размер клетки или выше разрешение построенной карты. Чем больше рабочая область, тем крупнее клетки или ниже разрешение карты. Очевидно, что мелкие клетки или высокое разрешение требуют большего объема памяти устройства хранения 120.
На Фиг.2 изображены этапы, которые могут быть выполнены контроллером 100 для запроса данных о местоположении и построения карты, как описано выше со ссылкой на Фиг.3. На Фиг.2 на этапе 210 происходит определение размера рабочей области, т.е. определение параллельного и перпендикулярного пороговых расстояний. Затем на этапе 220 система запрашивает данные о местоположении у GPS-спутников. Затем на этапе 230 контроллер 100 на основании полученных данных о местоположении транспортного средства определяет, находится ли оно в рабочей области или за ее пределами. Другими словами, контроллер 100 определяет, находится ли транспортное средство в пределах области, ограниченной пороговым параллельным расстоянием 330 и пороговым перпендикулярным расстоянием 340. Как было сказано выше, параллельное и перпендикулярное расстояния могут быть заранее установленными или переменными. Если транспортное средство находится в пределах рабочей области, то алгоритм возвращается на этап 220 и снова периодически выполняет запрос данных о местоположении. С другой стороны, если транспортное средство выходит за пределы рабочей области (выходит за пределы параллельного и перпендикулярного пороговых расстояний), то на этапе 240 система сохраняет текущие данные о местоположении (долготу и широту) в устройство хранения 120 в качестве координатного узла 310. После сохранения координатного узла алгоритм возвращается на этап 220 и снова производит периодический запрос данных о местоположении. Частота запроса данных может быть заранее установленной или переменной. Таким образом, набор координатных узлов 310 будет сохранен для последующего использования, и эти узлы могут быть сопоставлены друг с другом таким образом, чтобы определить и отобразить сохраненный маршрут, пройденный транспортным средством.
Описанный выше способ со ссылкой на Фиг.2 и Фиг.3 представляет собой способ построения в режиме реального времени карты маршрута, пройденного транспортным средством, а также ее локального сохранения на транспортном средстве. При этом нет необходимости в предварительно записанных картах, предоставляемых специальным поставщиком, а также в наличии канала связи с источником данных, расположенным за пределами транспортного средства.
Описанная выше со ссылкой на Фиг.2 и Фиг.3 двухмерная карта маршрутов, пройденных транспортным средством, может быть дополнена путем добавления других характеристик пройденного маршрута. Например, на Фиг.4, 5 представлен способ, аналогичный способу с Фиг.2, 3, для сохранения данных о высоте над уровнем моря для пройденного маршрута, которые затем могут быть вызваны системой для предоставления водителю и системам управления информации о рельефе местности и других изменениях высоты дороги на протяжении маршрута. На Фиг.5 приведена графическая иллюстрация принципов записи данных о высоте над уровнем моря, соответствующих маршруту. Как и в описанном выше способе, система периодически запрашивает данные о высоте у спутников системы GPS для текущего местоположения транспортного средства. Запрашиваемые данные о высоте изображены на Фиг.5 в форме больших закрашенных кружков 510a-510d и небольших кружков 520a-520w. Как и прежде, рабочая область вокруг транспортного средства определена пороговым параллельным расстоянием 530 и пороговым перпендикулярным расстоянием 540, оба из которых могут быть предварительно заданными или переменными значениями. Пороговое перпендикулярное расстояние 540 взято из предыдущей выборки данных о направлении движения транспортного средства. Пороговое расстояние 530 между продольными линиями является расстоянием между двумя воображаемыми продольными линиями, расположенными над транспортным средством и под ним вдоль направления движения. Когда система определяет, что транспортное средство вышло за пределы рабочей области (вышло за пределы порогового расстояния между продольными или поперечными линиями), она сохраняет данные о высоте вместе с данными о местоположении транспортного средства в качестве координатного узла 510a-510d в устройстве хранения для последующего использования. Сохраненные координаты 510a-510d высоты могут быть сопоставлены друг с другом для построения карты рельефа местности для отображения водителю изменения высоты на ранее пройденном маршруте.
На Фиг.4 представлена схема процесса, которая описывает способ, выполняемый контроллером 100 для построения карты рельефа местности, описываемой со ссылкой на Фиг.5. На этапе 410 система определяет рабочую область по высоте, образованную пороговым параллельным расстоянием 530 по высоте и пороговым перпендикулярным расстоянием 540 по высоте. Параллельное и перпендикулярное пороговые расстояния по высоте могут быть заранее установленными или переменными значениями, а также могут быть практически любыми. На этапе 420 происходит сбор данных о высоте с помощью GPS-спутников. На этапе 430 контроллер 100 определяет, находится ли транспортное средство в пределах рабочей области или нет (т.е. в пределах порогового параллельного расстояния 530 по высоте и порогового перпендикулярного расстояния 540 по высоте). Если да, то алгоритм возвращается на этап 420 и снова периодически производит запрос данных о высоте. Частота запроса данных о высоте может быть заранее установленной или переменной. Если транспортное средство вышло за пределы рабочей области (т.е. за пределы порогового параллельного расстояния 530 по высоте и порогового перпендикулярного расстояния 540 по высоте), то на этапе 440 система выполняет запрос у GPS-системы географических данных, связанных с точкой, в которой транспортное средство вышло за пределы рабочей области по высоте. Затем на этапе 450 система сохраняет данные о высоте вместе с географическими данными на устройстве хранения 120 в качестве нового координатного узла 510a-510d высоты. Затем алгоритм возвращается на этап 420 и снова периодически производит запрос данных о высоте. Затем эти сохраненные координатные узлы высоты могут быть вызваны и сопоставлены друг с другом для создания и предоставления водителю информации об изменении рельефа местности (например, холмы) на пройденном маршруте, когда транспортное средство будет проходить данный маршрут в будущем.
Карта, построенная в соответствии со способом с Фиг.2 и Фиг.3 и дополненная или не дополненная данными о высоте в соответствии со способом с Фиг.4 и Фиг.5, может быть также дополнена другими данными путем их сопоставления и сохранения при прохождении маршрута транспортным средством. Например, такие полученные от транспортного средства эксплуатационные данные, как скорость движения, скорость рыскания, уровни ускорения, отслеживание полосы движения и т.д., могут быть сопоставлены и сохранены для последующего использования системой управления или для настройки различных бортовых систем на основании накопленных данных об изменении стиля вождения при прохождении различных участков ранее изученного маршрута. Также может быть выполнен запрос других данных, связанных с маршрутом. В совокупности под запрашиваемыми и сопоставленными с картой данными понимаются «представляющие интерес данные». Такие данные могут быть получены от различных датчиков и систем, встроенных в транспортное средство, с помощью известных способов. На Фиг.6 и Фиг.7 представлен процесс выполнения запроса, сохранения и сопоставления с картой представляющих интерес данных.
Как показано на Фиг.7, периодически производится запрос представляющих интерес данных. Большие закрашенные кружки 710а-710d и небольшие кружки 720a-720w представляют собой образцы данных, представляющих интерес. Как было сказано со ссылкой на Фиг.2-5, система определяет, нужно ли сохранять конкретные представляющие интерес данные на основании того, выходят ли они за пределы рабочей области, определяемой параллельными и перпендикулярными пороговыми расстояниями, связанными с представляющими интерес данными. Пороговые параллельные и перпендикулярные расстояния могут быть заранее установленными или переменными. Если представляющие интерес данные являются эксплуатационными характеристиками транспортного средства, то пороговое параллельное расстояние представляет собой диапазон конкретной характеристики, а пороговое перпендикулярное расстояние представляет собой расстояние, проходимое транспортным средством по маршруту. Например, если эксплуатационная характеристика или представляющая интерес переменная является скоростью движения транспортного средства, то пороговое параллельное расстояние может быть установлено на 10 км/ч, а пороговое расстояние между поперечными линиями может быть установлено на 300 футов. Если запрашиваемая скорость транспортного средства изменяется более чем на 5 миль/ч в любом направлении (увеличивается или уменьшается), то скорость (или представляющая интерес переменная) выходит за пределы порогового параллельного расстояния. В другом случае, когда транспортное средство сохраняет относительно постоянную скорость (не изменяется более чем на 5 миль/ч в любом направлении) на расстоянии более 300 футов, то транспортное средство выходит за пределы порогового перпендикулярного расстояния. В любом случае транспортное средство выйдет за пределы рабочей области и запрашиваемые представляющие интерес данные будут сохранены в качестве «узла данных» в устройстве хранения 120.
Каждый сохраненный узел данных 710 должен быть сопоставлен с точкой на изученном маршруте карты. Сопоставление позволяет отображать водителю сохраненный узел данных в определенной точке на карте в будущем, когда транспортное средство проходит по данному маршруту. Один возможный способ выполнения такого сопоставления заключается в запросе и сохранении данных от GPS-системы, связанных с каждым узлом 710 данных, представляющих интерес, так же, как в описании для высотных узлов, относящемся к Фиг.4 и Фиг.5. Для снижения требуемого объема памяти устройства хранения 120 можно использовать альтернативный способ сопоставления узлов представляющих интерес данных с местоположением на изученной карте. Вместо сохранения нового набора данных о местоположении от GPS-системы для каждого узла данных, представляющих интерес, каждый такой узел может быть сопоставлен с существующим координатным узлом на изученной карте и его «смещением», что может быть эффективным с точки зрения использования памяти. Например, если скорость транспортного средства выходит за пределы рабочей области в точке на маршруте, соответствующей 75% расстояния между первым и вторым существующими координатными узлами на маршруте, то новый узел скорости может быть сохранен и сопоставлен с точкой на сохраненном маршруте, которая соответствует 75% расстояния между первым и вторым координатными узлами.
Таким образом, можно эффективно (с точки зрения использования памяти) запрашивать, выборочно хранить и сопоставлять данные с ранее пройденным маршрутом, связанные с широким диапазоном эксплуатационных характеристик транспортного средства, и/или другие данные, связанные с физическим маршрутом. Таким образом, эти данные можно использовать и отображать водителю и/или предоставлять системам управления в будущем при прохождении транспортным средством данного маршрута.
На Фиг.6 представлена блок-схема процесса, которая описывает этапы, выполняемые контроллером 100 для выполнения способа, описываемого со ссылкой на Фиг.7. На этапе 610 система определяет рабочую область для предоставляющих интерес данных. Как было сказано ранее, рабочая область определена пороговым параллельным расстоянием и пороговым перпендикулярным расстоянием, которые могут быть заранее установленными или переменными. На этапе 620 выполняется получение представляющих интерес данных. Получение выполняется с помощью различных датчиков и прочих известных из уровня техники устройств для сбора данных, связанных с эксплуатацией транспортного средства и/или условиями окружающей среды. На этапе 630 контроллер 100 определяет, находятся ли представляющие интерес данные в рабочей области или за ее пределами. Если да, то алгоритм возвращается на этап 620 и снова периодически производит запрос данных. Если полученные данные находятся за пределами рабочей области, то на этапе 640 эти данные сопоставляются с координатным узлом на изученной карте. Сопоставление может быть выполнено путем запроса у GPS-спутников данных о местоположении транспортного средства, когда представляющие интерес данные выходят за пределы рабочей области, и сохранения совокупности этих данных в качестве нового узла. В ином случае представляющие интерес данные могут быть сопоставлены с существующим координатным узлом на изученной карте с помощью значения «смещения». На этапе 650 полученные представляющие интерес данные сохраняются вместе с привязкой к конкретному местоположению на изученной карте. Затем алгоритм возвращается на этап 620 и снова периодически производит запрос данных.
После изучения и сохранения координатных узлов можно построить карту с помощью сопоставления координатных узлов друг с другом. Другими словами, когда транспортное средство снова проходит ранее изученный маршрут, система предоставляет визуальную информацию о маршруте на дисплее. Если другие данные (например, высота, эксплуатационные характеристики и т.д.) были сохранены и сопоставлены с точками на изученной карте, то эти данные также могут быть отображены водителю вместе с предоставлением информации о накопленных данных о стиле вождения на проходимых участках маршрута. Также можно использовать дополнительные данные, например, накопленные данные об эксплуатационных характеристиках, для управления или настройки работы транспортного средства при последующем прохождении ранее изученного маршрута.
На Фиг.8 представлена схема процесса, демонстрирующая процедуру использования и отображения сохраненных данных, связанных с ранее изученным маршрутом. На этапе 810 определяется область, соответствующая местоположению, которая в данном случае определена заранее заданными или переменными пороговыми значениями по долготе и по широте. Размеры области, соответствующей местоположению, не зависят от размеров ранее описанной области, используемой для изучения маршрута (со ссылкой на Фиг.2 и Фиг.3). В данном способе область, соответствующая местоположению, используется для определения того, достаточно ли близко текущее местоположение транспортного средства находится по отношению к существующему сохраненному координатному узлу. Иначе говоря, если данные о долготе и широте текущего местоположения транспортного средства находятся в пределах пороговых значений долготы и широты (т.е. в пределах области местоположения) ранее изученного координатного узла, то система сопоставляет текущее местоположение с ранее изученным координатным узлом. С этой целью на этапе 820 система выполняет запрос данных о местоположении у GPS-спутников. На этапе 830 контроллер 100 определяет, находится ли определенное текущее местоположение транспортного средства в пределах области местоположения, т.е. в пределах пороговых значений долготы и широты ранее изученного координатного узла. Если да, то на этапе 840 система отображает ранее изученный маршрут или выполняет сопоставление между соответствующим координатным узлом и следующим координатным узлом ранее изученного маршрута. Также водителю могут быть отображены другие определенные ранее данные, например, данные о высоте и эксплуатационные данные транспортного средства, сопоставленные с координатным узлом. Также на этапе 850 заранее установленные эксплуатационные данные транспортного средства, сопоставленные с текущим координатным узлом на маршруте, могут быть использованы для управления и настройки систем транспортного средства. После этого алгоритм возвращается к этапу 820 для периодического запроса данных о текущем местоположении транспортного средства у GPS-спутников. Когда текущее местоположение транспортного средства выходит за пределы области (т.е. выходит за пределы пороговых значений долготы или широты), система определяет, что транспортное средство отклонилось от ранее изученного маршрута и начинает изучать новый маршрут, используя способ и этапы, описанные со ссылкой на Фиг.2 и Фиг.3.
Что касается процессов, систем, способов, эвристических правил и т.д., изложенных в данном описании изобретения, следует понимать, что, несмотря на то, что этапы процессов описаны происходящими в соответствии с определенной упорядоченной последовательностью, они могут быть выполнены в другом порядке, некоторые этапы могут быть выполнены одновременно, а другие этапы могут быть добавлены или опущены. Другими словами, описания процессов в данном документе приведены в целях иллюстрации конкретных вариантов воплощения изобретения и не могут быть рассмотрены как ограничивающие.
Изобретение относится к электронным системам для транспортных средств, в частности к картографическим системам. Картографическая система для транспортного средства включает в себя бортовое электронное устройство хранения, GPS-приемник и электронный контроллер. Электронный контроллер выполнен с возможностью принимать от GPS-приемника GPS-данные, связанные с текущим местоположением транспортного средства, сохранять эти данные на электронном устройстве хранения, если местоположение транспортного средства находится за пределами области местоположения, и сбрасывать выбранные GPS-данные, если транспортное средство находится в пределах области местоположения. Обеспечивается обновление и дополнение маршрутов на основании истории передвижений транспортного средства. 2 н. и 22 з.п. ф-лы, 8 ил.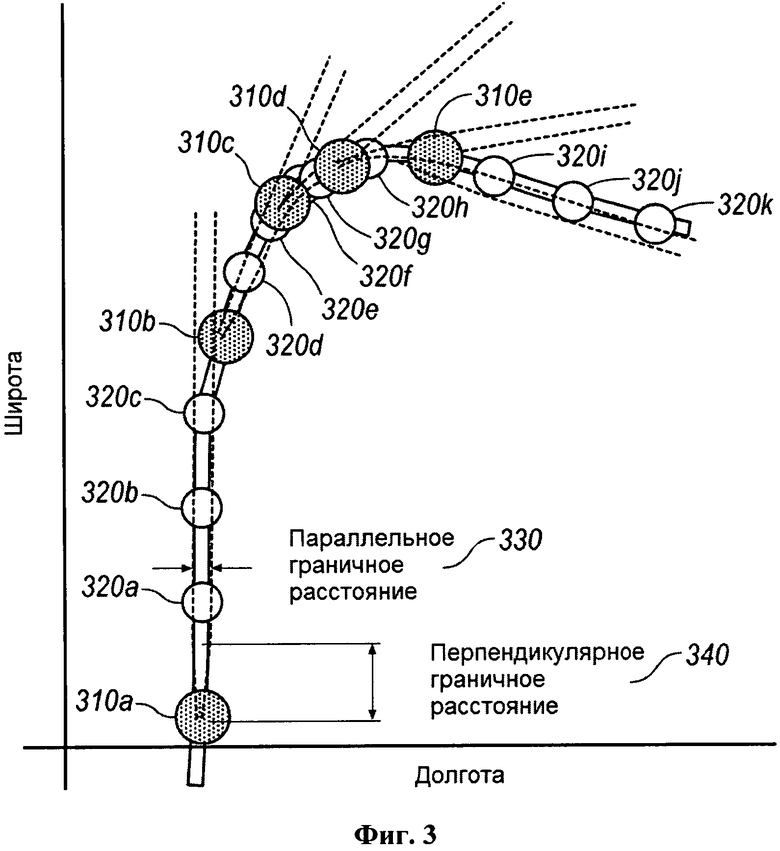
1. Картографическая система транспортного средства, содержащая:
бортовое электронное запоминающее устройство;
GPS-приемник и
электронный контроллер, соединенный с возможностью связи с электронным запоминающим устройством и GPS-приемником и выполненный с возможностью:
периодической выборки GPS-данных от упомянутого GPS-приемника, указывающих текущее местоположение транспортного средства;
определения по выбранным GPS-данным, находится ли транспортное средство в пределах области местоположений; и
хранения выбранных GPS-данных на электронном запоминающем устройстве, если местоположение транспортного средства находится за пределами области местоположений, и сброса выбранных GPS-данных, если транспортное средство находится в пределах области местоположений.
2. Картографическая система транспортного средства по п. 1, причем упомянутая область местоположений содержит:
параллельную границу, которая представляет собой значение, задающее расстояние между двумя воображаемыми параллельными линиями, центрированными относительно противоположных бортов транспортного средства и выставленными в направлении движения транспортного средства; и
перпендикулярную границу, которая представляет собой значение, задающее расстояние в направлении движения транспортного средства.
3. Картографическая система транспортного средства по п. 1, причем упомянутые параллельная граница и перпендикулярная граница заданы заранее.
4. Картографическая система транспортного средства по п. 1, причем упомянутые параллельная и перпендикулярная границы являются переменными.
5. Картографическая система транспортного средства по п. 1, причем упомянутый контроллер дополнительно выполнен с возможностью создавать маршрутную карту ранее пройденного маршрута путем объединения ранее сохраненных GPS-данных, связанных с ранее пройденным маршрутом.
6. Картографическая система транспортного средства по п. 5, причем упомянутый контроллер дополнительно выполнен с возможностью сопоставления текущего маршрута транспортного средства с ранее пройденным маршрутом транспортного средства.
7. Картографическая система транспортного средства по п. 6, причем упомянутый контроллер выполнен с возможностью сопоставления текущего маршрута транспортного средства с ранее пройденным маршрутом транспортного средства посредством:
приема GPS-данных о местоположении, указывающих текущее местоположение транспортного средства; и
определения, находится ли текущее местоположение транспортного средства в пределах области, соответствующей местоположению, по сравнению с ранее сохраненными GPS-данными о местоположении.
8. Картографическая система транспортного средства по п. 7, причем упомянутая область, соответствующая местоположению, содержит границу долготы и границу широты.
9. Картографическая система транспортного средства по п. 8, причем упомянутый контроллер дополнительно выполнен с возможностью отображения данных ранее сохраненного маршрута, если упомянутый текущий маршрут транспортного средства соответствует ранее пройденному маршруту.
10. Картографическая система транспортного средства по п. 1, причем упомянутый контроллер выполнен с возможностью:
принимать GPS-данные от GPS-приемника, указывающие высоту над уровнем моря, связанную с текущим местоположением транспортного средства; и
сохранять эти GPS-данные на электронном запоминающем устройстве, если высота над уровнем моря транспортного средства находится за пределами области высот над уровнем моря.
11. Картографическая система транспортного средства по п. 10, причем упомянутый контроллер дополнительно выполнен с возможностью:
принимать эксплуатационные данные, связанные с переменной рабочей характеристикой транспортного средства; и
связывать эксплуатационные данные с сохраненными GPS-данными о местоположении, соответствующими точке на ранее пройденном маршруте, и сохранять эти эксплуатационные данные, если упомянутые эксплуатационные данные выходят за пределы области эксплуатационных данных.
12. Картографическая система транспортного средства по п. 10, причем упомянутая область высот над уровнем моря содержит:
параллельную границу, которая представляет собой значение, задающее расстояние между двумя воображаемыми параллельными линиями, которые центрируют транспортное средство сверху и снизу и которые выставлены в направлении движения транспортного средства, и
перпендикулярную границу, которая представляет собой значение, задающее расстояние в направлении движения транспортного средства.
13. Картографическая система транспортного средства по п. 11, причем упомянутое транспортное средство выполнено с возможностью настраивать эксплуатационные параметры системы транспортного средства на основании ранее сохраненных эксплуатационных данных, связанных с ранее сохраненным маршрутом, который совпадает с текущим маршрутом транспортного средства.
14. Способ создания бортовой карты транспортного средства ранее пройденного маршрута, содержащий:
выборку GPS-данных от GPS-спутника, указывающих текущее местоположение транспортного средства;
определение по выбранным GPS-данным, находится ли транспортное средство в пределах огибающей местоположения; и
хранение упомянутых полученных GPS-данных на бортовом электронном запоминающем устройстве, если местоположение транспортного средства находится за пределами области местоположений, и сброс выбранных GPS-данных, если транспортное средство находится в пределах области местоположений.
15. Способ по п. 14, причем упомянутая область местоположений содержит:
параллельную границу, которая представляет собой значение, задающее расстояние между двумя воображаемыми параллельными линиями, центрированным относительно противоположных бортов транспортного средства и выставленными в направлении движения транспортного средства; и
перпендикулярную границу, которая представляет собой значение, задающее расстояние в направлении движения транспортного средства.
16. Способ по п. 15, дополнительно содержащий этап создания маршрутной карты ранее пройденного маршрута путем объединения ранее сохраненных GPS-данных, связанных с ранее пройденным маршрутом.
17. Способ по п. 14, дополнительно содержащий этап сопоставления текущего маршрута транспортного средства с ранее пройденным маршрутом транспортного средства.
18. Способ по п. 17, причем этап сопоставления содержит этапы:
прием GPS-данных о местоположении, указывающих текущее местоположение транспортного средства; и
определение, находится ли текущее местоположение транспортного средства в пределах области, соответствующей местоположению, по сравнению с ранее сохраненными GPS-данными о местоположении.
19. Способ по п. 18, причем упомянутая область, соответствующая местоположению, содержит границу долготы и границу широты.
20. Способ по п. 19, дополнительно содержащий этап отображения данных ранее сохраненного маршрута, если упомянутый текущий маршрут транспортного средства соответствует ранее пройденному маршруту.
21. Способ по п. 14, дополнительно содержащий этапы:
прием GPS-данных от упомянутого GPS-приемника, указывающих высоту над уровнем моря, связанную с текущим местоположением транспортного средства; и
сохранение этих GPS-данных на электронном запоминающем устройстве, если высота над уровнем моря транспортного средства находится за пределами области высот над уровнем моря.
22. Способ по п. 21, дополнительно содержащий этапы:
прием эксплуатационных данных, связанных с переменной рабочей характеристикой транспортного средства; и
связывание эксплуатационных данных с сохраненными GPS-данными о местоположении, соответствующими точке на ранее пройденном маршруте, и сохранение этих эксплуатационных данных, если упомянутые эксплуатационные данные выходят за пределы области эксплуатационных данных.
23. Способ по п. 21, причем упомянутая область высот над уровнем моря содержит:
параллельную границу, которая является значением, задающим расстоянием между двумя воображаемыми параллельными линиями, которые центрируют транспортное средство сверху и снизу и которые выставлены в направлении движения транспортного средства, и
перпендикулярную границу, которая является значением, задающим расстояние в направлении движения транспортного средства.
24. Способ по п. 22, дополнительно содержащий этап настройки эксплуатационных параметров системы транспортного средства на основании ранее сохраненных эксплуатационных данных, связанных с ранее сохраненным маршрутом, который совпадает с текущим маршрутом транспортного средства.
| US 6198996 B1, 06.03.2001 | |||
| US 6314370 B1, 06.11.2001 | |||
| Датчик давления или механического перемещения | 1958 |
|
SU122193A1 |
| CN 101228412 A, 28.07.2008. | |||

