Область техники, к которой относится изобретение
Изобретение относится к электронным системам для транспортных средств, в частности к системам адаптивного круиз-контроля.
Уровень техники
Из уровня техники известны системы адаптивного круиз-контроля (АСС) для автомобильных транспортных средств, контролирующие дистанцию между одним транспортным средством и другим транспортным средством, идущим перед ним. Для определения скорости впереди идущего транспортного средства и дистанции до него эти системы, как правило, используют направленный вперед радар, установленный за решеткой радиатора транспортного средства. На основании этих данных системы АСС могут автоматически регулировать скорость транспортного средства, соблюдая заранее заданную дистанцию до впереди идущего транспортного средства. Например, если впереди идущее транспортное средство снижает скорость или если на пути транспортного средства обнаружен другой объект, система АСС может послать двигателю или тормозной системе сигнал о снижении скорости транспортного средства. Затем, при освобождении пути система может снова ускорить транспортное средство до заданной скорости и заданной дистанции до впереди идущего транспортного средства.
Кроме того, типичная система АСС может включать в себя контрольные переключатели, установленные на рулевом колесе и позволяющие водителю вручную изменять заданную дистанцию до впереди идущего транспортного средства. В этом случае водитель может изменять настройки вручную в режиме реального времени, обеспечивая различную дистанцию до впереди идущего транспортного средства и создавая комфортные условия в течение всей поездки. Например, водитель может ездить на работу по участку скоростной автострады с неинтенсивным движением и высокой скоростью и отрегулировать систему АСС для соблюдения дистанции в 65 м при скорости 100 км/ч. На участках автострады с меньшей скоростью и меньшей интенсивностью, где, например, соединяются несколько автострад, водитель может изменить настройки системы АСС, задав дистанцию в 30 м. Соответственно водитель может вручную выбирать различные заранее заданные дистанции для определенных участков дороги.
Раскрытие изобретения
Предложена система соотнесения с картой характеристик поведения водителя и параметров вождения. В одном из вариантов осуществления система может включать в себя GPS-приемник, генерирующий GPS-данные о текущем местоположении транспортного средства. Кроме того, система может включать в себя радиолокационное устройство, генерирующее данные о расстоянии до впереди идущего транспортного средства. Кроме того, система может включать в себя электронный контроллер, выполненный с возможностью генерировать опытную информацию о дистанции на основании текущей дистанции и сохраненных данных о дистанции, а затем сопоставлять опытную информацию о дистанции с GPS-данными.
Представлен также способ получения и изменения задаваемого параметра поведения водителя в указанной системе транспортного средства. В одном из вариантов способ может включать в себя этап получения GPS-данных о текущем местоположении транспортного средства от GPS-спутника и получение текущей информации о дистанции до впереди идущего транспортного средства. Кроме того, способ может также предусматривать генерацию опытных данных о дистанции на основании текущей информации о дистанции и сохраненных данных о дистанции, а также сопоставлять опытные данные о дистанции с GPS-данными.
Краткое описание чертежей
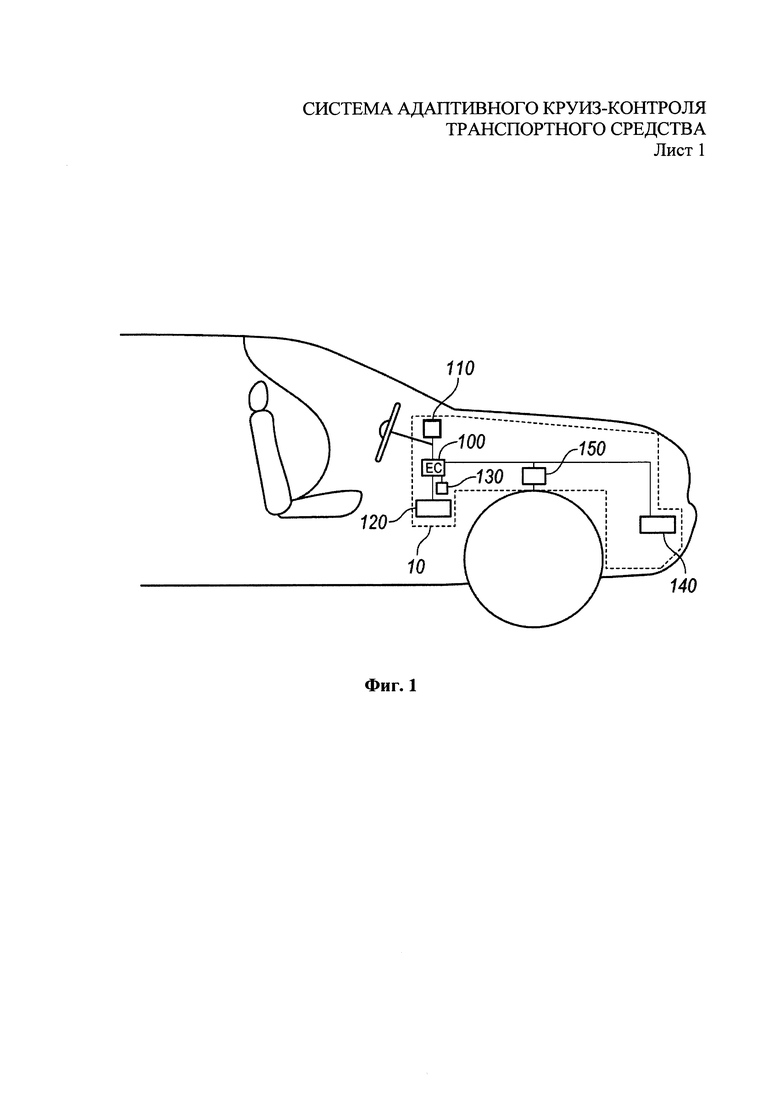
На Фиг. 1 изображена общая схема компонентов системы картографирования поведения водителя и примерное изображение транспортного средства, в котором может быть применена такая система.
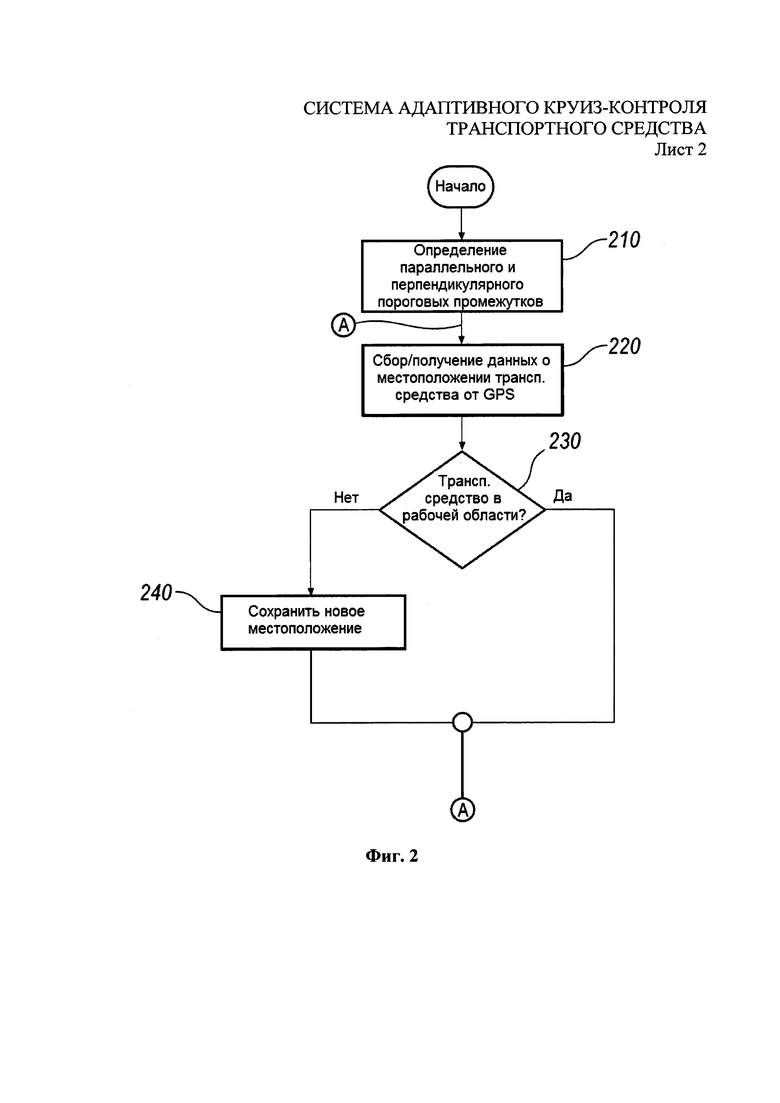
На Фиг. 2 представлена логическая схема процесса, демонстрирующая этапы процедуры выборочного сохранения данных о местоположении для построения карты маршрута.
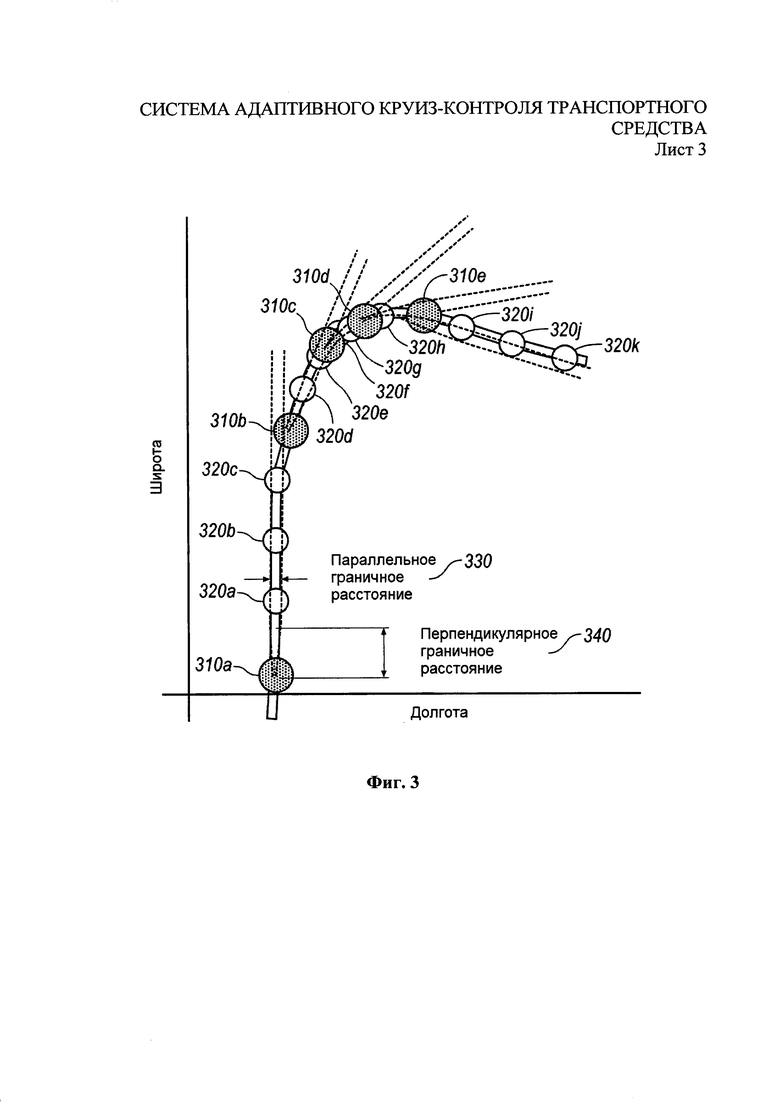
На Фиг. 3 представлена иллюстрация принципов процесса, показанного на Фиг. 2.
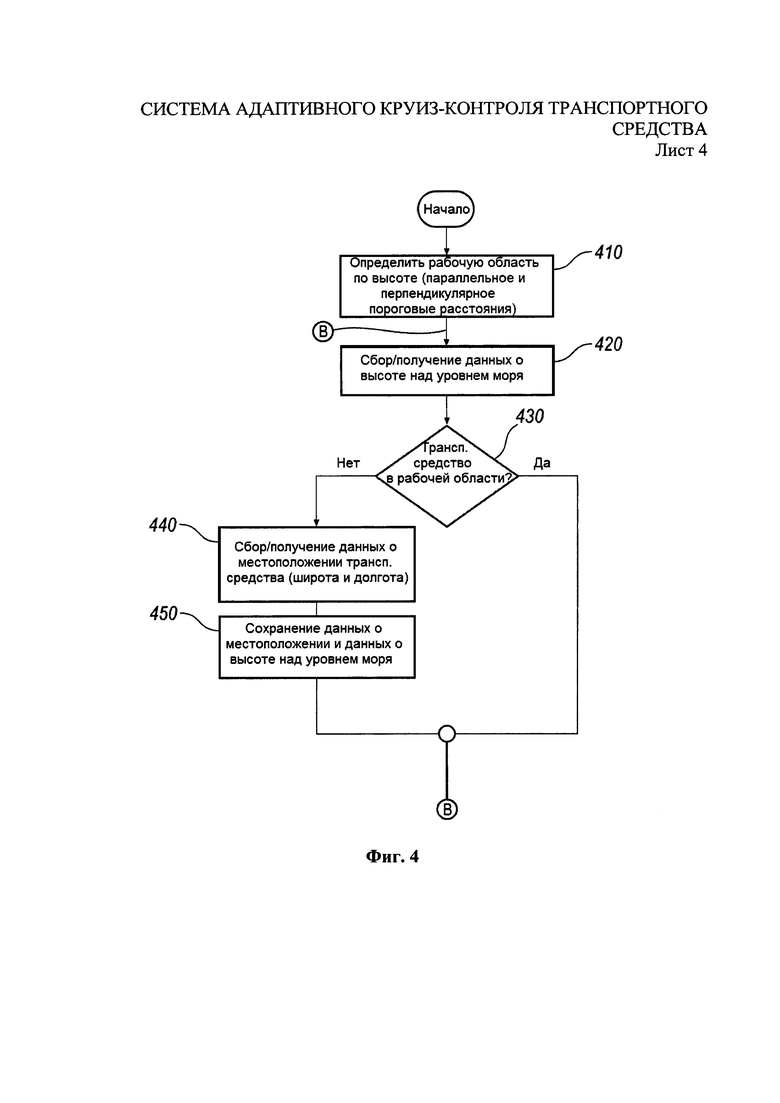
На Фиг. 4 представлена схема процесса, демонстрирующая этапы процедуры выборочного сохранения данных о высоте над уровнем моря для уточнения карты маршрута.
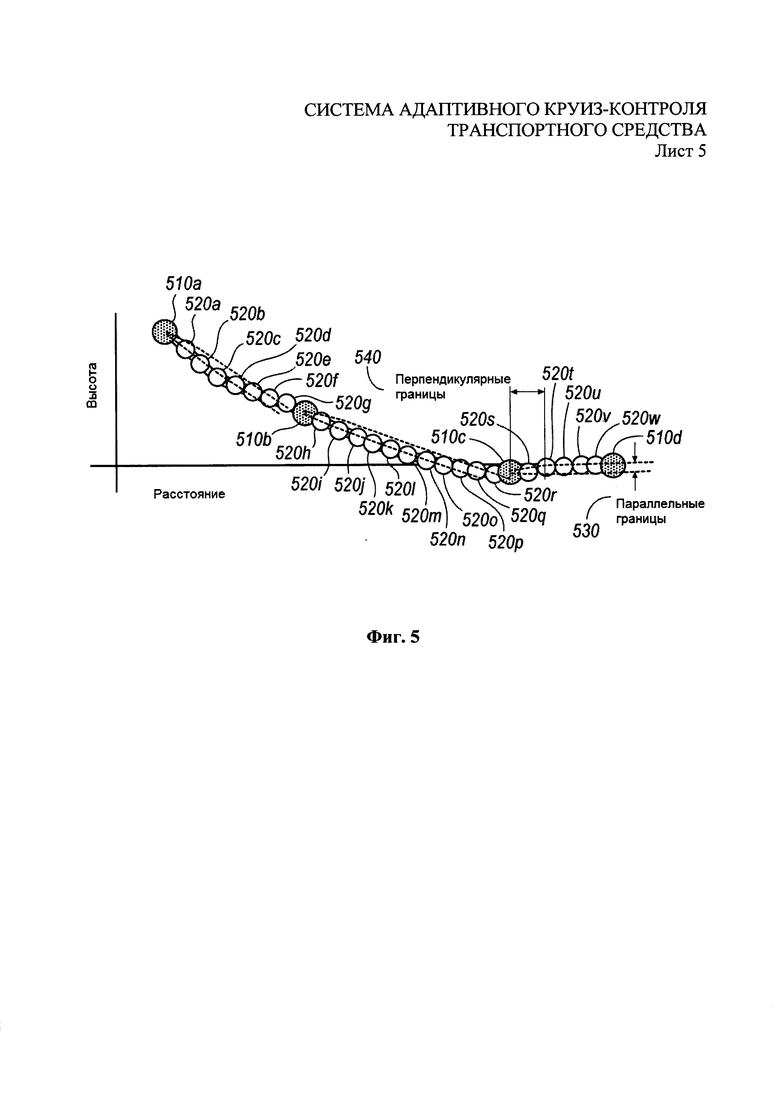
На Фиг. 5 представлена иллюстрация принципов процесса, изображенного на Фиг. 4.
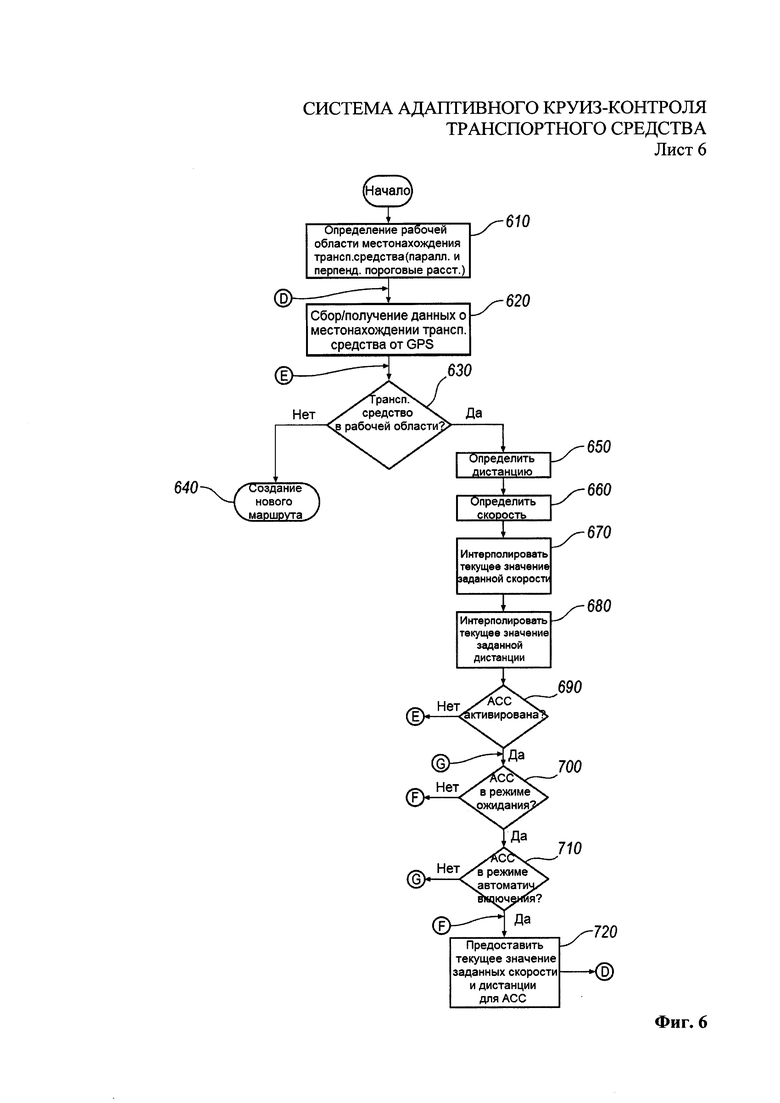
На Фиг. 6 представлена схема процесса, демонстрирующая этапы процедуры сопоставления текущего маршрута с ранее сохраненным маршрутом транспортного средства, а также регулировки задаваемых параметров в системе АСС и получения новых значений скорости и дистанции.
Осуществление изобретения
В настоящем документе описан один из вариантов системы и способа модификации и присвоения опытных данных о дистанции и скорости определенным местам вдоль текущего маршрута транспортного средства. В одном варианте осуществления система может создавать и использовать локализованную и адаптивную карту маршрута. В частности, система может быть расположена в самом транспортном средстве, периодически получать данные о местоположении транспортного средства с GPS-спутников и выборочно сохранять часть данных о местоположении транспортного средства согласно определенным критериям. Система может сохранять опытные данные о дистанции и скорости транспортного средства по ходу его движения по маршруту. Таким образом, картографические данные и данные о работе транспортного средства, соответствующие определенному маршруту транспортного средства, могут сохраняться локально, занимая относительно небольшой объем памяти электронного запоминающего устройства. Локально сохраненные картографические данные и параметры поведения водителя могут относиться к тому транспортному средству, в котором происходит запись данных, или к выбранным водителям, пользующимся транспортным средством. Локально сохраненные картографические данные могут использоваться в последующих поездках на том же самом транспортном средстве для просмотра предполагаемого пути транспортного средства. Локально сохраненные данные о параметрах поведения могут использоваться в последующих поездках совместно с системой АСС для регулировки работы транспортного средства в качестве данных о предыдущих действиях, связанных с данным транспортным средством в соответствующих точках маршрута. Описанный способ может не зависеть от заранее записанных карт и не требует наличия канала связи для получения данных извне (хотя и не исключает возможное использование или взаимодействие с такими заранее записанными картами и/или каналами связи). Вместо этого описанная система может запрашивать данные о местоположении и эксплуатационные данные транспортного средства, относящиеся к конкретным маршрутам транспортного средства, а также использовать такие специальные данные в последующих поездках по данному маршруту.
На Фиг. 1 изображен пример транспортного средства 1, в котором может быть использована система 10 для создания локализованных карт и модификации задаваемых параметров системы АСС для пройденных маршрутов. Система 10 может включать в себя по крайней мере один электронный контроллер 100, подключенный к по крайней мере одному запоминающему устройству 110, автомобильное электронное запоминающее устройство 120, GPS-приемник 130, радиолокационное устройство 140 (например, направленное вперед радиолокационное устройство) и датчик 150 скорости вращения колес. Контроллер 100 может получать GPS-данные, генерируемые GPS-приемником 130 и указывающие на текущее местоположение транспортного средства. Кроме того, контроллер 100 может быть выполнен с возможностью принимать данные о текущей дистанции, генерируемые радиолокационным устройством 140 и указывающие на текущую дистанцию до впереди идущего транспортного средства. Контроллер 100 может быть также выполнен с возможностью принимать данные о текущей скорости, генерируемые датчиком 150 скорости вращения колес и указывающие на текущую скорость транспортного средства. Однако контроллер может также получать данные, сгенерированные и другими датчиками транспортного средства. Контроллер может использовать GPS-данные для создания опытной карты маршрутов, по которым двигалось данное транспортное средство, а затем привязывать опытные данные о дистанции и скорости транспортного средства к опытным маршрутам, используя способы и алгоритмы, описанные ниже.
На Фиг. 2 представлена схема процесса, демонстрирующая основные функциональные этапы алгоритма, хранящегося в устройстве хранения ПО и выполняемого контроллером 100, для запроса данных о местоположении и эффективного построения в режиме реального времени карты нового маршрута, по которому движется транспортное средство. На Фиг. 3 дано общее графическое изображение способа с Фиг. 2. На Фиг. 3 кружками представлены последующие географические местоположения на местности в координатной сетке «долгота/широта» (высота над уровнем моря не показана). Большие закрашенные кружки 310а-310е и небольшие закрашенные кружки 320а-320k соответствуют точкам, в которых производится периодическое сопоставление географического местоположения транспортного средства (т.е. запрос у спутников GPS-данных о местоположении транспортного средства по долготе и широте). Данные долготы/широты, связанные с большими закрашенными кружками 310а-310е, могут храниться системой в устройстве хранения 120 для последующего использования при прохождении транспортным средством данного маршрута в будущем. Данные, связанные с небольшими кружками 320а-320k, игнорируются. Большие кружки 310а-310е представляют собой «координатные узлы», которые позже используются для определения ранее пройденного маршрута объединения этих координатных узлов 310а-310е друг с другом.
Координатный узел 310а представляет первую выборку данных о местоположении транспортного средства на новом маршруте. Таким образом, система может сохранять данные о местоположении, связанные с координатным узлом 310, в качестве «головной» или начальной точки маршрута. Затем система может периодически производить запрос или выборку данных долготы/широты, связанных с последующим местоположением транспортного средства и принятых GPS-приемником 130 от спутников системы GPS. Система может определять необходимость сохранения запрашиваемых данных о местоположении в качестве координатных узлов (например, координатные узлы 310b-310е), когда эти данные выходят за пределы рабочей области, заключенной между параллельными и перпендикулярными граничными линиями.
Пороговым параллельным расстоянием 330 может быть расстояние между двумя воображаемыми продольными линиями, расположенными по бокам от транспортного средства, при этом транспортное средство расположено на одинаковом расстоянии от них. Направление параллельных линий в любой заданный момент может определяться текущим направлением движения транспортного средства. Например, пороговое параллельное расстояние 330, изображенное на Фиг. 3, ориентировано вертикально, поскольку направление движения транспортного средства на графике соответствует вертикальному направлению. Величина порогового параллельного расстояния 330 (расстояние между пунктирными линиями) может представлять собой заранее установленное значение или программируемое переменное значение. Пороговое параллельное расстояние 330 может быть практически любым (например, 1 метр, 2 метра, 3 метра и т.д.). Пороговым перпендикулярным расстоянием 340 может быть расстояние (заранее установленное или переменное) между воображаемыми поперечными линиями, взятым в направлении движения транспортного средства. Для транспортного средства, движущегося вперед, пороговое перпендикулярное расстояние 340 обычно отсчитывается от сохраненного координатного узла вперед по направлению движения транспортного средства. Для транспортного средства, движущегося назад, пороговое перпендикулярное расстояние 340 может отсчитываться от сохраненного координатного узла назад по направлению движения транспортного средства. Величина порогового перпендикулярного расстояния 340 может быть практически любой, например 3 метра, 5 метров, 7 метров и т.д. Пороговые параллельное и перпендикулярное расстояния могут задавать рабочую область вокруг движущегося транспортного средства. Запрашиваемые данные о местоположении могут игнорироваться, когда транспортное средство находится в пределах рабочей области (в пределах параллельного и перпендикулярного пороговых расстояний), что изображено на Фиг.3 небольшими кружками 320а-320k. Однако когда транспортное средство выходит за пределы рабочей области (выходит за пределы параллельного и перпендикулярного пороговых расстояний), система может сохранять текущие данные о местоположении в устройство хранения 120 в качестве координатного узла 310. В таком случае данные о местоположении транспортного средства могут сохраняться в качестве координатного узла 310 каждый раз, когда транспортное средство отклоняется от текущего направления на заданное расстояние, что определяется выходом за пределы порогового параллельного расстояния 330. Данные о местоположении транспортного средства также сохраняются в виде координатного узла 310 каждый раз, когда транспортное средство продолжает двигаться в том же направлении (в пределах порогового параллельного расстояния) на заданном расстоянии, что определяется выходом за пределы порогового перпендикулярного расстояния 340. Сохраненные координатные узлы 310а-310е далее могут быть использованы для определения маршрута, ранее пройденного данным транспортным средством, который может отображаться водителю на дисплее при следующей поездке по данному маршруту. Чем меньше рабочая область (т.е. чем больше параллельное и/или перпендикулярное пороговое расстояние), тем больше координатных узлов 310 будет сохранено и тем меньше будет размер клетки или выше разрешение построенной карты. Чем больше рабочая область, тем крупнее клетки или ниже разрешение карты. Очевидно, что мелкие клетки или высокое разрешение требуют большего объема памяти устройства хранения 120.
На Фиг. 2 изображены этапы, которые могут быть выполнены контроллером 100 для запроса данных о местоположении и построения карты, как описано выше со ссылкой на Фиг. 3. На Фиг. 2 на этапе 210 происходит определение размера рабочей области, т.е. определение параллельного и перпендикулярного пороговых расстояний. Затем на этапе 220 система может запрашивать данные о местоположении у GPS-спутников. Затем на этапе 230 контроллер 100 на основании полученных данных о местоположении транспортного средства может определять, находится ли оно в рабочей области или за ее пределами. Другими словами, контроллер 100 может определять, находится ли транспортное средство в пределах области, ограниченной пороговым параллельным расстоянием 330 и пороговым перпендикулярным расстоянием 340. Как было сказано выше, параллельное и перпендикулярное расстояния могут быть заранее установленными или переменными. Если транспортное средство находится в пределах рабочей области, то алгоритм может вернуться на этап 220 и снова периодически выполнять запрос данных о местоположении. С другой стороны, если транспортное средство выходит за пределы рабочей области (выходит за пределы параллельного и перпендикулярного пороговых расстояний), то на этапе 240 система может сохранять текущие данные о местоположении (долготу и широту) в устройство хранения 120 в качестве координатного узла 310. После сохранения координатного узла алгоритм может вернуться на этап 220 и снова периодически производить запрос данных о местоположении. Частота запроса данных может быть заранее установленной или переменной. Таким образом, набор координатных узлов 310 будет сохранен для последующего использования, и эти узлы могут быть сопоставлены друг с другом таким образом, чтобы определить и отобразить сохраненный маршрут, пройденный транспортным средством.
Описанный выше способ со ссылкой на Фиг. 2 и Фиг. 3 представляет собой способ построения в режиме реального времени карты маршрута, пройденного транспортным средством, а также ее локального сохранения на транспортном средстве. При этом нет необходимости в предварительно записанных картах, предоставляемых специальным поставщиком, а также в наличии канала связи с источником данных, расположенным за пределами транспортного средства. Однако вместо этого система может использовать заранее составленную карту, приобретенную у разработчика, и связать характеристики вождения с этой картой.
Описанная выше со ссылкой на Фиг. 2 и Фиг. 3 двухмерная карта маршрутов, пройденных транспортным средством, может быть дополнена путем добавления других характеристик пройденного маршрута. Например, на Фиг. 4-5 представлен способ, аналогичный способу с Фиг. 2-3, для сохранения данных о высоте над уровнем моря для пройденного маршрута, которые затем могут быть вызваны системой для предоставления водителю и системам управления, таким как система АСС, информации о рельефе местности и других изменениях высоты дороги на протяжении маршрута. На Фиг. 5 приведена графическая иллюстрация принципов записи данных о высоте над уровнем моря, соответствующих маршруту. Как и в описанном выше способе, система может периодически запрашивать данные о высоте у спутников системы GPS для текущего местоположения транспортного средства. Запрашиваемые данные о высоте изображены на Фиг. 5 в форме больших закрашенных кружков 510а-510е и небольших кружков 520а-520w. Как и прежде, рабочая область вокруг транспортного средства может быть определена пороговым параллельным расстоянием 530 и пороговым перпендикулярным расстоянием 540, оба из которых могут быть предварительно заданными или переменными значениями. Пороговое перпендикулярное расстояние 540 может быть взято из предыдущей выборки данных о направлении движения транспортного средства. Пороговое расстояние 530 между продольными линиями может быть расстоянием между двумя воображаемыми продольными линиями, расположенными над транспортным средством и под ним вдоль направления движения. Когда система определяет, что транспортное средство вышло за пределы рабочей области (вышло за пределы порогового расстояния между продольными или поперечными линиями), она может сохранять данные о высоте вместе с данными о местоположении транспортного средства в качестве координатного узла 510а-510d в устройстве хранения для последующего использования. Сохраненные координаты 510а-510d высоты могут быть сопоставлены друг с другом для построения карты рельефа местности для отображения водителю изменения высоты на ранее пройденном маршруте.
На Фиг. 4 представлена схема процесса, которая описывает способ, выполняемый контроллером 100 для построения карты рельефа местности, описываемой со ссылкой на Фиг. 5. На этапе 410 система может определять рабочую область по высоте, образованную пороговым параллельным расстоянием 530 по высоте и пороговым перпендикулярным расстоянием 540 по высоте. Параллельное и перпендикулярное пороговые расстояния по высоте могут быть заранее установленными или переменными значениями, а также могут быть практически любыми. На этапе 420 может происходить сбор данных о высоте с помощью GPS-спутников. На этапе 430 контроллер 100 может определять, находится ли транспортное средство в пределах рабочей области или нет (т.е. в пределах порогового параллельного расстояния 530 по высоте и порогового перпендикулярного расстояния 540 по высоте). Если да, то алгоритм может вернуться на этап 420 и снова периодически производить запрос данных о высоте. Частота запроса данных о высоте может быть заранее установленной или переменной. Если транспортное средство вышло за пределы рабочей области (т.е. за пределы порогового параллельного расстояния 530 по высоте и порогового перпендикулярного расстояния 540 по высоте), то на этапе 440 система может выполнять запрос у GPS-системы географических данных, связанных с точкой, в которой транспортное средство вышло за пределы рабочей области по высоте. Затем на этапе 450 система может сохранять данные о высоте вместе с географическими данными на устройстве хранения 120 в качестве нового координатного узла 510а-510d высоты. Затем алгоритм может вернуться на этап 420 и снова периодически производить запрос данных о высоте. Затем эти сохраненные координатные узлы высоты могут быть вызваны и сопоставлены друг с другом для создания и предоставления водителю информации об изменении рельефа местности (например, холмы) на пройденном маршруте, когда транспортное средство будет проходить данный маршрут в будущем.
Карта, построенная в соответствии со способом с Фиг. 2 и Фиг. 3 и дополненная или не дополненная данными о высоте в соответствии со способом с Фиг. 4 и Фиг. 5, может быть также дополнена другими данными путем их сопоставления и сохранения при прохождении маршрута транспортным средством. Например, скорость движения, значения дистанции от впереди идущих транспортных средств и другие характеристики вождения могут быть сопоставлены и сохранены для последующего использования для управления или настройки различных бортовых систем, включая систему АСС, на основании накопленных данных об изменении стиля вождения при прохождении различных участков ранее изученного маршрута. Также может быть выполнен запрос других данных, связанных с маршрутом. В совокупности под запрашиваемыми и сопоставленными с картой данными понимаются «представляющие интерес данные». Такие данные могут быть получены от различных датчиков и систем, встроенных в транспортное средство, с помощью известных способов. На Фиг.6 представлен процесс выполнения запроса, сохранения и сопоставления с картой представляющих интерес данных.
Фиг. 6 представляет собой блок-схему, на которой показан способ использования сохраненных данных, связанных с изученным ранее маршрутом, для модификации различных задаваемых параметров для работы системы АСС на изученных маршрутах.
На этапе 610 система определяет рабочую область для сопоставления местоположения. Как было сказано ранее, рабочая область определена пороговым параллельным расстоянием и пороговым перпендикулярным расстоянием, которые могут быть заранее установленными или переменными. Размеры соответствующего рабочей области для сопоставления местоположения могут не зависеть от размеров описанной ранее рабочей области, использовавшейся для изучения маршрута (как описано со ссылкой на Фиг. 2 и 3). В данном способе рабочая область используется для определения того, достаточно ли близким является текущее местоположение транспортного средства к существующему сохраненному узлу местоположения. Другими словами, если данные ширины и долготы для данного местоположения транспортного средства находятся в пределах порогового расстояния между продольными и поперечными линиями (т.е. рабочей области) узла местоположения, изученного ранее, то система соотносит текущее местоположение с изученным ранее узлом местоположения. Для этого на этапе 620 система может запросить данные о местоположении транспортного средства с GPS-спутников. На этапе 630 контроллер 100 может определить, находится ли полученное текущее местоположение транспортного средства в пределах рабочей области, т.е. в пределах пороговых значений широты и долготы, изученного ранее узла местоположения. Если нет, способ переходит к этапу 640. Если да, способ переходит к этапу 650.
На этапе 640 система 10 может сохранять местоположение транспортного средства как новый узел местоположения. Система также может сохранить новое задаваемое значение для дистанции, связанное с этим новым узлом. Однако вместо этого система может использовать заданные значения скорости и дистанции, соотнесенные с непосредственно предшествующим узлом местоположения.
На этапе 650 система 10 может обновлять данные о дистанции, соотнесенные с узлами, расположенными на пройденном ранее маршруте. В частности, данный процесс может быть начат в том случае, если было определено, что заранее заданное пороговое расстояние соблюдено. В частности, контроллер может получать от GPS-приемника GPS-данные, показывающие, что транспортное средство находится в непосредственной близости от узла, например на расстоянии меньше 1% от расстояния между узлами 310а и 310b. После этого контроллер 100 может получить от радиолокационного устройства данные о текущей дистанции, а из запоминающего устройства - сохраненные данные о дистанции. Контроллер 100 может вычислить опытные данные о дистанции на основании данных о текущей дистанции и сохраненных данных о дистанции, обновляя таким образом заданное значение дистанции. Затем контроллер 100 может соотнести эти опытные данные о дистанции с соответствующими GPS-данными. Например, контроллер 100 может вычислить опытные данные о дистанции для узла 310а как сумму 10% от текущей дистанции, равной 70 м, и 90% от сохраненной или изученной ранее дистанции, равной 50 м, в результате чего заданное значение для дистанции в узле 310а будет изменено на 52 м. Опытные данные о дистанции могут быть сохранены в запоминающем устройстве и использованы совместно с системой АСС, как описано ниже, для этапов 670 и далее при последующей поездке по данному маршруту.
На этапе 660 контроллер 100 может обновлять данные о скорости, соотнесенные с узлами по всему изученному ранее маршруту. В частности, контроллер может получить от датчика скорости вращения колес данные о текущей скорости, а от запоминающего устройства - сохраненные данные о скорости. После этого контроллер может вычислить опытные данные о скорости транспортного средства на основании текущей скорости и сохраненной скорости. Затем контроллер 100 может соотнести полученные данные о скорости с соответствующими данными GPS-навигации. Например, контроллер 100 может вычислить опытные данные о скорости для узла 310а как сумму 10% от текущей скорости, равной 95 км/ч, и 90% от сохраненной или изученной ранее скорости, равной 110 км/ч, в результате чего заданное значение для скорости в узле 310а будет изменено на 108,5 км/ч. Опытные данные скорости могут быть сохранены в запоминающем устройстве и использованы вместе с системой АСС, как описано ниже, для этапов 670 и далее при последующей поездке по данному маршруту.
На этапе 670 контроллер 100 может в режиме реального времени интерполировать заданное значение скорости между двумя последовательными узлами на пройденном ранее маршруте. В частности, контроллер может вычислить заданное значение скорости на основании изученных ранее значений скорости в узлах 310а, 310b, а также на основании расстояния от транспортного средства до этих узлов. В соответствии с предыдущим примером транспортное средство может быть расположено менее чем в 1% от расстояния между узлами 310а и 310b. Изученные ранее значения скорости в узлах 310а, 310b могут быть равны 110 км/ч и 80 км/ч соответственно. Контроллер может рассчитать заданное значение для скорости как сумму 1% от 110 км/ч и 99% от 80 км/ч, получая интерполированное заданное значение скорости, равное 109,7 км/ч.
Аналогичным образом на этапе 680 контроллер 100 может в режиме реального времени интерполировать заданное значение для дистанции до впереди идущего транспортного средства между двумя последовательными узлами на пройденном ранее маршруте. В соответствии с предыдущим примером транспортное средство может быть расположено менее чем в 1% от расстояния между узлами 310а и 310b. Изученные ранее дистанции в узлах 310а, 310b могут быть равны 50 м и 70 м соответственно. Контроллер может рассчитать заданное значение для дистанции как сумму 1% от 50 м и 99% от 70 м, получая интерполированное заданное значение дистанции, равное 50,2 м. Такая интерполяция может позволить системе АСС управлять транспортным средством плавно, без резких ускорений и торможений.
На этапе 690 контроллер 100 может определять, включил ли водитель систему 10 АСС для обеспечения автоматического контроля скорости и дистанции до впереди идущего транспортного средства. Если нет, способ возвращается к этапу 620. Если да, способ переходит к этапу 700.
На этапе 700 контроллер может проверить, включена ли система АСС в режиме ожидания. Если нет, способ немедленно переходит к этапу 720. Если же система АСС включена в режиме ожидания, способ переходит к этапу 710.
На этапе 710 контроллер 100 может проверять, активирована ли функция автоматического включения системы АСС. Если нет, способ может вернуться обратно к этапу 620. Если же функция автоматического включения была активирована, способ может перейти к этапу 720.
На этапе 720 контроллер 100 может предоставить системе АСС текущие заданные значения для скорости транспортного средства и дистанции до впереди идущего транспортного средства, позволяя таким образом системе АСС контролировать механизмы и устройства транспортного средства, например дроссельные заслонки и/или тормозной механизм. Продолжая пример выше, система АСС может использовать текущее заданное значение дистанции, равное 50,2 м, при следующей поездке по данному маршруту. Однако если контроллер 100 определит, что транспортное средство направляется в новую рабочую область и, следовательно, едет по маршруту, не пройденному ранее, контроллер может привязать изученное ранее заданное значение дистанции к новому узлу. Аналогичным образом если контроллер 100 определит, что транспортное средство направляется в новую рабочую область, контроллер может привязать изученную ранее заданное значение скорости к новому узлу.
В отношении описанных в данном документе процессов, систем, способов, эвристических алгоритмов и т.д. следует понимать, что, несмотря на обозначенную последовательность этапов, они могут быть выполнены в другой последовательности. Также следует понимать, что некоторые этапы могут быть выполнены одновременно, а также некоторые этапы могут быть добавлены или опущены. Другими словами, описания процессов представлены лишь в качестве примера вариантов осуществления изобретения и не рассматриваются как ограничение изобретения.
Таким образом, следует понимать, что описание приведено в целях наглядности, а не ограничения. Многие дополнительные варианты реализации и применения, отличные от показанных примеров, станут очевидны при ознакомлении с вышеприведенным описанием. Объем не должен быть определен на основании приведенного выше описания, но, напротив, должен быть определен на основании прилагаемой формулы изобретения наряду с полным объемом эквивалентов, для которых данная формула является основанием. Предполагается и имеется в виду, что описываемые технологии могут быть развиты и усовершенствованы в будущем, причем раскрытые системы и способы будут включены в подобные будущие варианты реализации. Таким образом, следует понимать, что применение изобретения может быть изменено и модифицировано.
Все термины, применяемые в формуле изобретения, следует понимать в их наиболее широких разумных толкованиях и их обычных значениях, как это понимают специалисты в данной области техники, если иное явно не указано в описании изобретения. В частности, использование слов «какой-либо», «данный», «вышеуказанный» и т.д. надо понимать как один или несколько указанных элементов, если в формуле не указано иное.
Предложена система адаптивного круиз-контроля для транспортного средства, в которой на карту наносят параметры вождения. Система может включать в себя GPS-приемник, генерирующий GPS-данные о текущем местоположении транспортного средства, и радиолокационное устройство, генерирующее данные о текущей дистанции до впереди идущего транспортного средства. Система также может иметь электронный контроллер, выполненный с возможностью генерировать опытные данные на основании текущих и сохраненных данных о дистанции, а затем соотносить полученные данные о дистанции с GPS-данными. Достигается увеличение комфорта и безопасности эксплуатации транспортного средства. 2 н. и 6 з.п. ф-лы, 6 ил.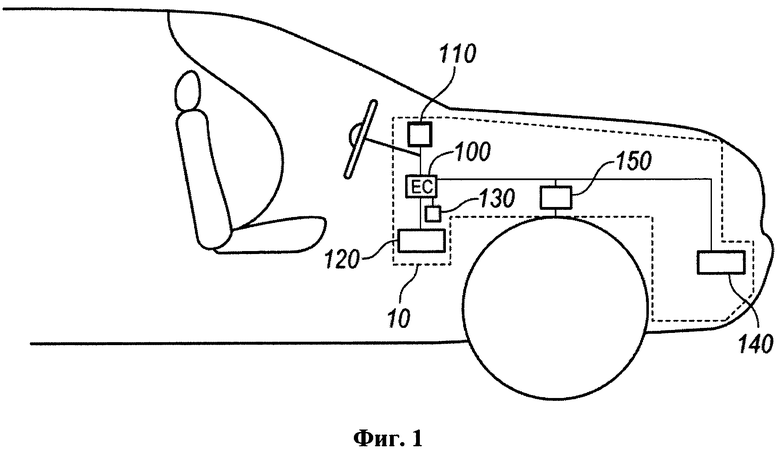
1. Система адаптивного круиз-контроля для транспортного средства, которая включает в себя GPS-приемник, генерирующий GPS-данные, указывающие на текущее местоположение транспортного средства, радиолокационное устройство, генерирующее данные о текущей дистанции до впереди идущего транспортного средства, а также электронный контроллер, который запрограммирован генерировать опытные данные на основании текущих и сохраненных данных о дистанции, а затем соотносить полученные данные о дистанции с GPS-данными и сохраненными данными о дистанции и применять опытные данные в соответствии с текущим местоположением транспортного средства, также определять опытные данные о дистанции на основании текущей дистанции и данных о дистанции, сохраненных на запоминающем устройстве, а также определять опытные данные о дистанции на основании суммы одной процентной доли от текущей дистанции и другой процентной доли от сохраненной дистанции.
2. Система по п. 1, которая включает в себя автомобильное электронное запоминающее устройство, имеющее электронную связь с указанным контроллером, причем контроллер запрограммирован получать сохраненные данные о дистанции от запоминающего устройства и сохранять опытные данные о дистанции на запоминающем устройстве.
3. Система по п. 1, в которой контроллер запрограммирован интерполировать заданную дистанцию в точке между двумя сохраненными местоположениями, основываясь на текущем местоположении транспортного средства относительно первого и второго местоположения и полученных данных о дистанции, соотнесенных с каждым из этих местоположений.
4. Система по п. 1, в которой радиолокационное устройство направлено вперед и прикреплено к передней части транспортного средства.
5. Способ модификации заданных значений параметров вождения, в котором получают от GPS-спутников GPS-данные о местоположении транспортного средства, получают от радиолокационного устройства текущие данные о дистанции до впереди идущего транспортного средства и генерируют опытные данные о дистанции на основании данных о текущей дистанции и сохраненных данных о дистанции, причем опытные данные о дистанции основаны по меньшей мере частично на сумме одной процентной доли от текущей дистанции и другой процентной доли от сохраненной дистанции, после чего соотносят опытные данные о дистанции с GPS-данными и применяют опытные данные в соответствии с текущим местоположением транспортного средства.
6. Способ по п. 5, в котором генерируют данные о текущей скорости транспортного средства и опытные данные о скорости, связанные с GPS-данными, данными о текущей скорости и сохраненными данными о скорости.
7. Способ по п. 6, в котором сохраняют полученные данные о дистанции и/или скорости на автомобильном электронном запоминающем устройстве.
8. Способ по п. 7, в котором определяют опытные данные о скорости на основании данных о текущей скорости и сохраненных данных о скорости с запоминающего устройства, привязывают полученные опытные данные о дистанции и/или скорости к сохраненным местоположениям, соответствующим точкам вдоль ранее пройденного маршрута.
| WO 2005061267 A1, 07.07.2005 | |||
| СПОСОБ БОЛЕЕ ЭФФЕКТИВНОГО ИСПОЛЬЗОВАНИЯ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2007 |
|
RU2457128C2 |
| Вагонетка с корытообразным кузовом | 1926 |
|
SU7276A1 |

