Область техники, к которой относится изобретение
Настоящее изобретение относится к способам и системам навигации транспортного средства, использующим определение местонахождения транспортного средства на основе GPS координат.
Уровень техники
GPS (глобальная система определения координат) и другие системы навигации с указанием поворотов становятся широко распространенными в качестве инструментов определения маршрута к определенному месту назначения. Например, система GPS навигации компании TOMTOM является переносным устройством GPS, которое можно перемещать из одного транспортного средства в другое. Используя спутниковый GPS сигнал, система определяет, где в настоящий момент на земном шаре находится транспортное средство. Эту информацию затем объединяют с картой или информацией о направлении движения для дальнейшего определения маршрута к выбранному пункту назначения.
Некоторые транспортные средства также имеют встроенную функцию GPS и для отображения маршрута и/или направления движения используют экран приборной панели. В других системах различные направления движения могут быть переданы водителю в форме речи системой транспортного средства вместо или в дополнение к отображению на экране.
В общем, системы GPS могут определять текущее место нахождения транспортного средства, определять положение на карте, соответствующее текущему месту нахождения, предоставлять различные направления движения из указанного места. Конечно, если картографические данные являются неполными или, например, транспортное средство припарковано в центре сенокосного угодья, система не получит традиционных «направлений карты», исходя из которых формируются направления движения для водителя.
В дополнение к таким ситуациям также встречаются «городские скошенные луга» в форме парковок, дорог и т.д., расположение которых не соответствует ни одному конкретному положению на карте по данным системы GPS. Одним из решений такой проблемы является программирование всех подобных участков и включение их в карту GPS, но так как такие участки подвержены изменению, а также появляются новые участки, выполнение подобной работы может стать достаточно трудным заданием.
В соответствии с этим системы GPS должны уметь «угадывать» дальнейшее определение маршрута для транспортного средства из текущего «неизвестного» местонахождения в определенное место вдоль маршрута движения.
Кроме того, некоторые компьютерные системы транспортного средства, например система FORD SYNC, не имеют возможности хранить все картографические данные в транспортном средстве, так как объем памяти может быть ограниченным и для его увеличения необходимо иметь ряд приложений. Таким образом, соответствующие данные о конкретном месте, до которого необходимо добраться, можно передавать небольшими пакетами в реальном режиме времени. Так как транспортное средство не может владеть детальной картой местности, необходимо иметь возможность определения и/или предоставления направлений движения по маршруту из неизвестного местонахождения.
В качестве одного примера, если транспортное средство находится на парковке 201, показанной на Фиг.2, существует множество вариантов маршрута из указанного места до Главной улицы 209 (Main St.) (от которой известно направление движения). Система не может знать, что пользователь может выбрать маршрут 219, и аналогичным образом система (использующая ограниченный диапазон частот) не может отправить достаточное количество информации для охвата всех возможных маршрутов от парковки 201 до Главной улицы 209. Соответственно может потребоваться наличие способа для предоставления пользователю простых направлений движения, не требующих полного знания обо всех возможных маршрутах.
Раскрытие изобретения
В одном представленном варианте осуществления настоящего изобретения компьютерная система транспортного средства содержит канал связи, обеспечивающий связь между процессором транспортного средства и мобильным беспроводным устройством связи, аудиовыход, управляемый процессором для вывода направлений движения, и устройство GPS, допускающее определение координат транспортного средства и передачу координат процессору.
В этом представленном варианте осуществления изобретения процессор выполнен с возможностью получения координат от GPS-приемника и передает эти координаты мобильному устройству через канал связи. Мобильное беспроводное устройство связи затем передает эти координаты в удаленную сеть.
Также в этом варианте осуществления изобретения процессор выполнен с возможностью получения через канал связи картографических данных, относящихся к маршруту движения. Картографические данные включают в себя рекомендуемую стартовую улицу (начала маршрута движения). Определение стартовой улицы может быть основано на текущих координатах транспортного средства, определенных устройством GPS.
Процессор дополнительно выполнен с возможностью предоставления с помощью звукового или другого вывода информации инструкций о движении к рекомендуемой стартовой улице, по которой транспортное средство не находится в данный момент. Другими словами, если рекомендуемой стартовой улицей была Форд Роуд ("Ford Road"), аудиосистема транспортного средства выдаст команду, такую как «Направляйтесь к Форд Роуд».
Процессор дополнительно выполнен с возможностью определения, находится ли транспортное средство, начальные координаты которого не соответствовали рекомендуемой стартовой улице, в том месте, координаты которого соответствовали рекомендуемой стартовой улице. В этом случае транспортное средство находилось в местоположении, для которого картографические данные были недоступны. Система может затем определить, что транспортное средство в указанный момент находится на рекомендуемой стартовой улице.
Вслед за этим, на основании, по меньшей мере, частичного соответствия между текущим местонахождением транспортного средства и координатами рекомендуемой стартовой улицы (в частности, когда транспортное средство находится на улице начала движения) процессор выполнен с возможностью вывода, по меньшей мере, начальных инструкций маршрута движения начиная с рекомендуемой улицы начала движения.
В другом показанном варианте осуществления настоящего изобретения компьютерная система транспортного средства содержит канал связи для осуществления связи между процессором транспортного средства и мобильным беспроводным устройством связи и аудиовыход, управляемый процессором для вывода направлений движения, и систему GPS, допускающую определение координат транспортного средства и передачу координат процессору с помощью GPS-приемника.
В этом показанном варианте осуществления настоящего изобретения процессор получает координаты от GPS-приемника и передает координаты мобильному беспроводному устройству связи через канал связи, как и в предыдущем варианте осуществления изобретения.
Процессор может также получать через канал связи картографические данные, относящиеся к маршрута движения транспортного средства.
Картографические данные дополнительно включают в себя ряд вероятных местонахождений. Транспортное средство скорее всего (на основании расчетов, выполненных, например, удаленной сетью) будет находиться в непосредственной близости от одного из вероятных местонахождений при получении процессором картографических данных.
Процессор также может определить на основании GPS координат транспортного средства при получении картографических данных, какое из вероятных местонахождений наиболее близко соответствует местонахождению транспортного средства. Процессор также может выдать одну или более инструкций движения на основании, по меньшей мере, частично того, вблизи какого вероятного местонахождения находится транспортное средство.
В третьем представленном варианте осуществления настоящего изобретения способ определения направления движения транспортного средства включает в себя получение входных данных, соответствующих координатам и скорости транспортного средства. Способ также включает в себя расчеты расстояния, которое транспортное средство может преодолеть в рамках определенного промежутка времени, на основании, по меньшей мере, полученных данных о скорости транспортного средства.
Способ дополнительно включает в себя определение приблизительного местонахождения транспортного средства на карте на основании координат и определение точек возможного местонахождения, до которых транспортное средство может двигаться в рамках определенного промежутка времени. Такое определение основано, по меньшей мере, частично на рассчитанном возможном пройденном расстояния.
Способ включает в себя определение предпочтительного маршрута движения до заранее выбранного пункта назначения на основании, по меньшей мере, частично координат транспортного средства. Также способ включает в себя определение одного или более альтернативных маршрутов движения до заранее выбранного пункта назначения, по меньшей мере, от одной из возможных точек местонахождения.
И наконец, способ включает в себя передачу ряда маршрутов движения, включая предпочтительный маршрут движения и один альтернативный маршрут движения.
Краткое описание чертежей
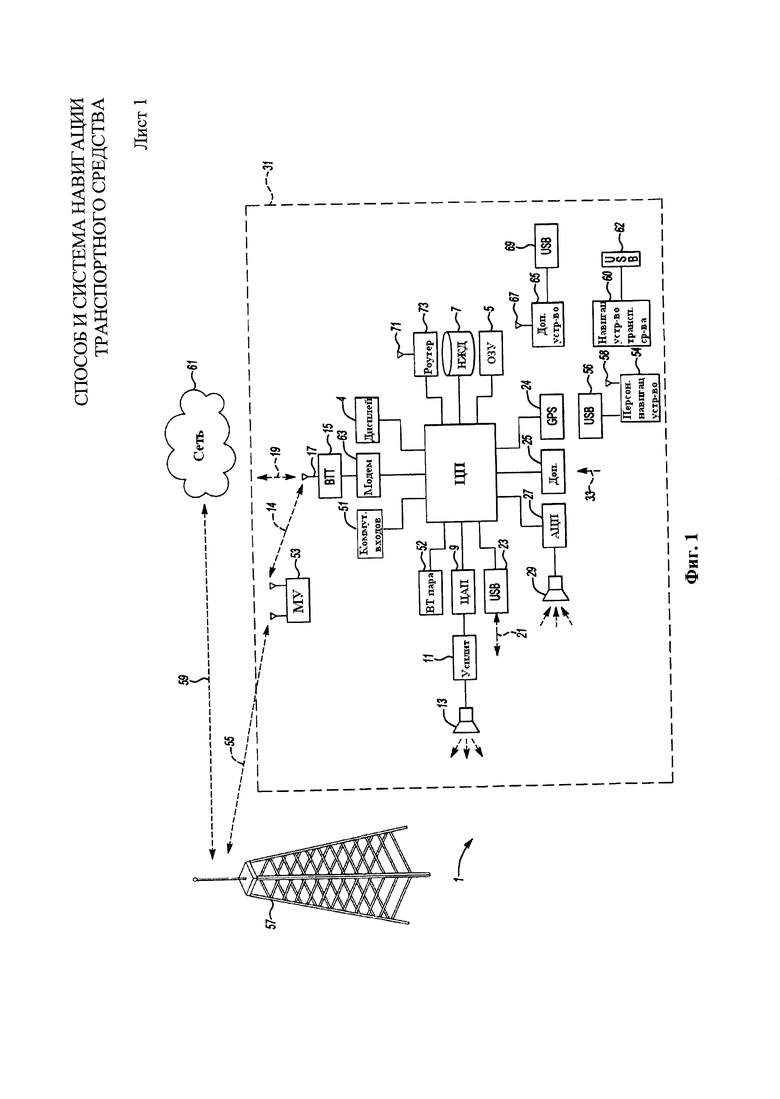
На Фиг.1 показана компьютерная система транспортного средства, которая может быть использована для осуществления способов, описанных в настоящем документе, и/или может содержать в качестве своей части или взаимодействовать с устройством, описанным в настоящем документе.
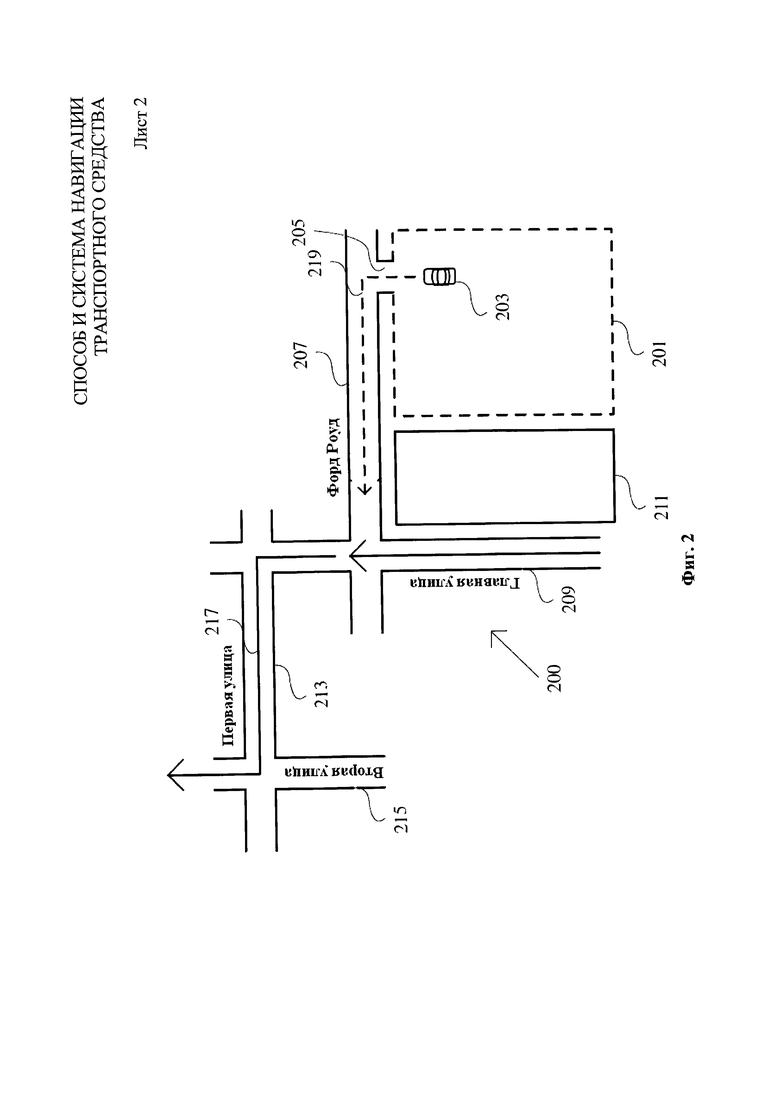
На Фиг.2 показан пример направления транспортного средства из «неизвестного» местонахождения до нужного маршрута движения.
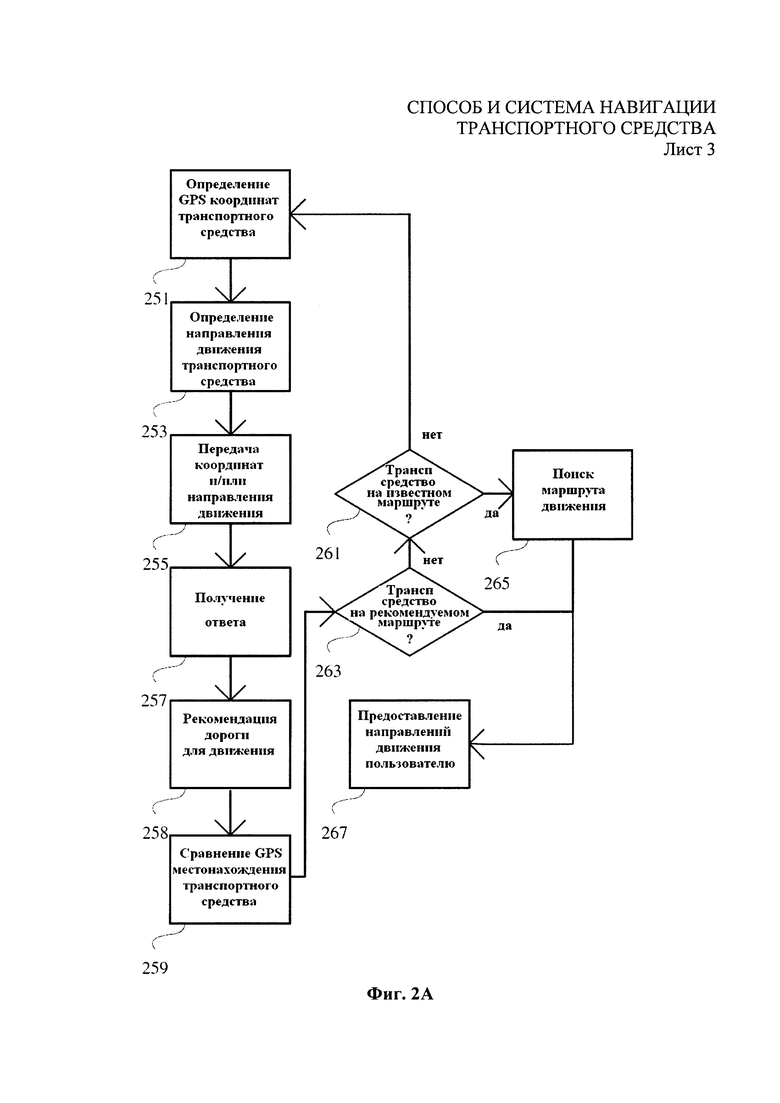
На Фиг.2А показан пример способа предоставления направлений движения из не указанного на карте местонахождения до нужного маршрута движения.
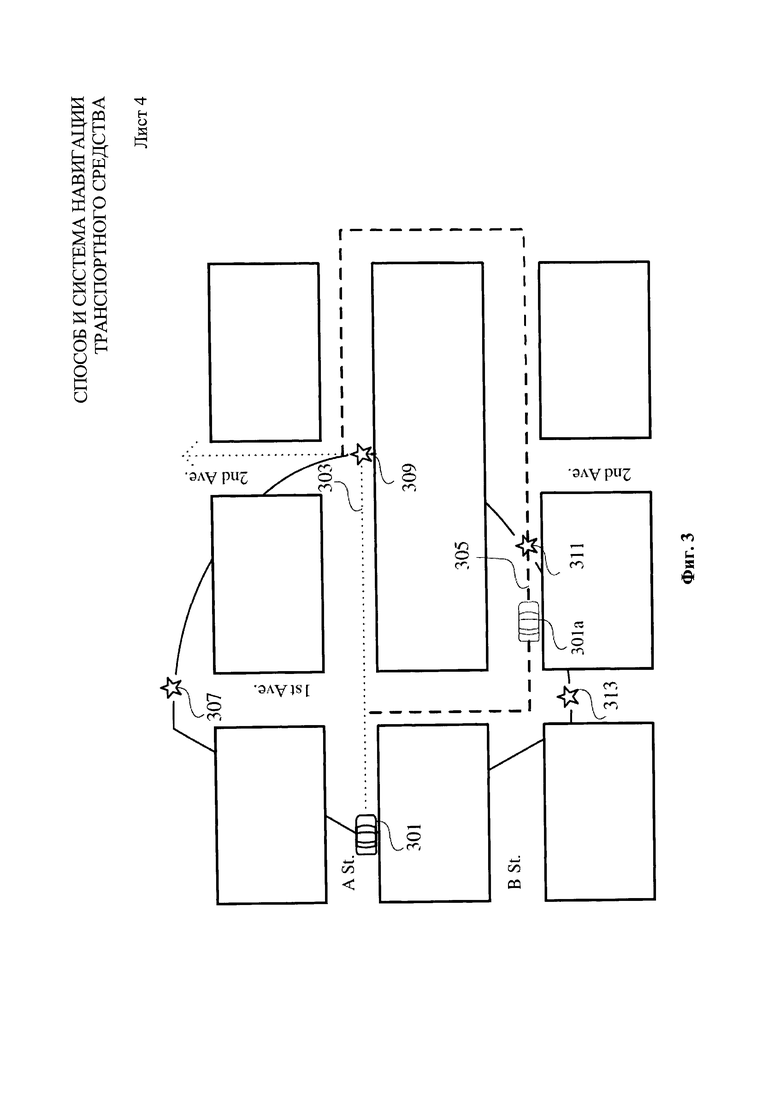
На Фиг.3 показан пример реализации системы определения микро маршрутов.
На Фиг.4 показан пример способа предоставления маршрута с использованием системы определения микромаршрутов.
Данные чертежи не являются исключительным представлением систем и способов, которые можно реализовать при осуществлении изобретения, раскрытого в приложенной формуле изобретения. Специалисты в данной области техники поймут, что примеры осуществления представленных систем и способов могут быть изменены или, в противном случае, адаптированы для соответствия заявленному варианту осуществления настоящего изобретения или его эквивалента.
Осуществление изобретения
На Фиг.1 показан пример модульной топологии компьютерной системы 1 транспортного средства для транспортного средства 31. Транспортное средство с установленной компьютерной системой 1 транспортного средства может содержать графический внешний интерфейс 4, расположенный в транспортном средстве. Пользователь также может взаимодействовать с этим интерфейсом при его наличии, например, с помощью сенсорного экрана. В другом представленном варианте осуществления изобретения взаимодействие осуществляется с помощью нажатия кнопок, голосовой связи и конструктивного синтеза речи.
В варианте осуществления изобретения, показанном на Фиг.1, один или более процессоров (например, ЦП) управляют, по меньшей мере, некоторыми этапами работы компьютерной системы транспортного средства. Встроенный в транспортное средство процессор позволяет осуществлять обработку команд и стандартных программ непосредственно в самом транспортном средстве. Более того, процессор может быть соединен с устройством 5 временного хранения и устройством 7 долгосрочного хранения. В представленном варианте осуществления изобретения устройством временного хранения является оперативное запоминающее устройство (ОЗУ), а устройством долгосрочного хранения - накопитель на жестком диске (НЖД) или флэш-память.
Процессор также оснащен рядом различных устройств ввода данных, позволяющих пользователю взаимодействовать с процессором. В представленном варианте осуществления предусмотрены микрофон 29, дополнительное устройство 25 ввода данных (на входе 33), USB устройство 23, устройство 24 GPS и BLUETOOTH устройство 15. Также представлен коммутатор 51 входов, который позволяет пользователю переключаться между различными устройствами ввода данных. В альтернативном варианте осуществления изобретения устройства ввода данных могут быть выбраны автоматически и/или в соответствии с заданным приоритетом. Входные сигналы, поступающие на микрофон и дополнительный разъем, преобразуют из аналоговой формы в цифровую преобразователем 27 (АЦП) перед поступлением в процессор.
Устройства вывода данных системы могут включать, в частности, дисплей 4, динамик 13 или вывод для стереосистемы. Динамик соединен с усилителем 11 и получает сигнал от процессора 3 через цифроаналоговый преобразователь 9 (ЦАП). Вывод информации также может быть осуществлен на удаленное устройство BLUETOOTH, такое как персональное навигационное устройство 54, или USB устройство, такое как навигационное устройство 60, транспортного средства через двусторонние потоки 19 и 21 данных соответственно.
В одном варианте осуществления изобретения система 1 использует приемопередатчик 15 BLUETOOTH (ВТТ) для соединения 17 с мобильным устройством 53 пользователя (например, мобильным телефоном, смартфоном, КПК и т.д.). Мобильное устройство в дальнейшем может быть использовано для соединения 59 с сетью 61 за пределами транспортного средства 31, например, с помощью канала связи 55 с вышкой 57 сотовой связи.
Пример соединения между мобильным устройством и приемопередатчиком BLUETOOTH представлен сигналом 14.
Команда установления соединения мобильного устройства 53 и приемопередатчика 15 BLUETOOTH может быть подана кнопкой 52 или с помощью аналогичного устройства ввода, передавая на центральный процессор (ЦП) информацию о том, что встроенный приемопередатчик BLUETOOTH будет соединен с приемопередатчиком BLUETOOTH на мобильном устройстве.
Обмен данными между ЦП 3 и сетью 61 может быть произведен с помощью, например, передачи информации на текущей частоте тарифного плана, на частотах выше частот передачи речи или с помощью двухтональных сигналов (DTMF), связанных с мобильным устройством 53. В альтернативном варианте осуществления изобретения может быть установлен встроенный модем 63 для обмена данными между ЦП 3 и сетью 61 на частотах, превышающих частоту передачи речи. В одном варианте осуществления изобретения процессор снабжен операционной системой, включающей прикладной программный интерфейс (API) для установления соединения с прикладным программным обеспечением модема. Прикладное программное обеспечение модема может получать доступ к встроенному модулю или прошивке приемопередатчика BLUETOOTH для осуществления беспроводного соединения с удаленным приемопередатчиком BLUETOOTH (таким как в мобильном устройстве). В другом варианте осуществления изобретения мобильное устройство 53 содержит модем для обмена данными тональной частоты или широкополосного обмена данными. В варианте осуществления изобретения, где обмен данными происходит на частотах выше частот передачи речи, может быть использована техника, известная как частотное мультиплексирование, при которой пользователь мобильного устройства может использовать устройство для разговора прямо во время передачи данных. В других случаях, когда пользователь не использует устройство, для передачи данных может использоваться весь диапазон частот (например, от 300 Гц до 3,4 кГц).
Если у пользователя есть возможность передачи информации на текущей частоте тарифного плана для мобильного устройства, возможно, чтобы этот тарифный план обеспечивал передачу данных в диапазоне широких частот и система сможет использовать гораздо более широкий диапазон частот (увеличивая скорость передачи данных). В еще одном варианте осуществления изобретения мобильное устройство 53 заменено устройством сотовой связи (не показано), установленном на транспортном средстве 31.
В одном варианте осуществления изобретения входные данные могут быть переданы через мобильное устройство на частоте выше частоты передачи речи или на текущей частоте тарифного плана через встроенный приемопередатчик BLUETOOTH во внутренний процессор 3 транспортного средства. В случае если данные носят временный характер, данные могут храниться, например, на ОЗУ 5 или НЖД 7 или другом носителе до тех пор, пока они будут необходимы.
К дополнительным источникам, которые могут взаимодействовать с транспортным средством, относится компас, расположенный на транспортном средстве, (не показан) персональное навигационное устройство 54, содержащее, например, USB-соединение 56 и/или антенну 58; или навигационное устройство 60 транспортного средства, содержащее USB-соединение 62 или другое соединение, встроенное устройство 24 GPS или удаленная система навигации (не показана), соединенная с сетью 61.
Более того, ЦП может устанавливать соединение с множеством дополнительных устройств 65. Эти устройства могут быть присоединены через беспроводное соединение 67 или проводное соединение 69. Также, или в качестве альтернативного варианта осуществления изобретения, ЦП может быть соединен с установленным в транспортном средстве беспроводным роутером 73, например, с помощью приемопередатчика 71 WiFi. Это позволяет ЦП устанавливать соединение с удаленными сетями в пределах досягаемости местного роутера 73.
На Фиг.2 показан пример направления транспортного средства из «неизвестного» местонахождения по нужному маршруту движения.
В этом показанном варианте осуществления изобретения транспортное средство 203 находится на парковке 201 за зданием 211. Парковка не отражается на картографических данных компьютерной системы транспортного средства, а также данные парковки не доступны для загрузки в систему.
Водитель транспортного средства решает проехать обозначенный маршрут 209, повернув направо на Вторую улицу 215 (2nd St.). Очевидно, для системы будет проблематично отобразить на карте прямолинейную траекторию к маршруту 209 от места расположения транспортного средства 203, так как в этом случае транспортное средство столкнется со зданиями, бордюрами, с разделяющей полосой между полосами дороги и т.д.
Вместо этого система предоставит простые устные инструкции (например) следующего рода: «двигайтесь к Форд Роуд (Ford Rd)». Это может быть особенно полезно, если система не содержит навигационный дисплей и не может выдать пользователю изображение требуемой дороги/маршрута в визуальной форме.
Система также может предоставить дополнительное направление, например, «двигайтесь на север к Форд Роуд» для облегчения следования к рекомендуемой начальной улице 207. Используя эти инструкции и компас, расположенный в транспортном средстве, водитель может направить транспортное средство 203 в сторону выезда с парковки через выход 205, даже если компьютерная система транспортного средства и элементы навигационной системы не содержат информации о выходе 205.
Как только транспортное средство выехало на рекомендуемый путь, система может направить транспортное средство вдоль пути 219 по направлению к Главной улице 209 (Main St.), с которой может быть проложен маршрут 217 путем перемещения по направлению к Первой улице 213 (1st St.) и, в конечном счете, ко Второй улице 215 (2nd St.).
На Фиг.2А показан примерный способ предоставления направлений движения из местонахождения, не указанного на карте, по нужному маршруту движения.
В этом показанном варианте осуществления изобретения компьютерная система транспортного средства сначала определяет GPS координаты транспортного средства (этап 251). Это определение может быть выполнено, например, в форме запроса от процессора, включенного в компьютерную систему транспортного средства, к GPS, включенного в транспортное средство (или соединенного с процессором при помощи проводного или беспроводного соединения).
Как только процессор получает GPS координаты, процессор также может, по меньшей мере, в данном варианте осуществления изобретения определить направление движения транспортного средства (этап 253), используя, например, компас, расположенный в транспортном средстве. GPS координаты и направление движения (если они определены) могут быть переданы удаленной сети (этап 255). В этом показанном варианте осуществления изобретения процессор соединен с мобильным устройством, в частности таким, как сотовый телефон. Процессор передает данные сотовому телефону или другому мобильному устройству, а мобильное устройство устанавливает соединение с удаленной сетью для завершения передачи.
Процессор затем получает ответ от удаленной сети (этап 257). И снова, в данном показанном варианте осуществления ответ передают от сети мобильному устройству и затем процессору.
В соответствие с данным показанным вариантом осуществления изобретения ответ содержит, по меньшей мере, один рекомендуемый путь, по которому должно перемещаться транспортное средство, если транспортное средство в настоящее время не находится на известной улице (например, на парковке).
Может существовать множество вариантов улиц, по которым транспортное средство может передвигаться от парковки. Удаленная сеть (или процессор) может выбрать одну улицу на основании, по меньшей мере, частично GPS координат транспортного средства (актуальных в момент времени передачи или текущих координат) и/или направления движения транспортного средства (и снова, направление движения на момент времени передачи или текущее направление движение).
Так как существует некоторая степень запаздывания между передачей координат и/или направления движения и получением ответа, производитель может предпочесть выполнение расчетов выбора близлежащей улицы сетью или, чтобы избежать этого запаздывания, производитель может выбрать, чтобы процессор получал информацию о нескольких вариантах улиц, а затем выполнял расчеты на основании определения местонахождения в режиме реального времени и данных о направлении движения.
После получения ответа и выбора рекомендуемой улицы процессор может затем передать инструкцию водителю транспортного средства о том, какой улицы необходимо достичь для того, чтобы добраться до требуемого маршрута движения (этап 258). Эта инструкция может быть передана, например, с помощью аудиосистемы транспортного средства или выдана на дисплее системы навигации.
Компьютерная система транспортного средства затем либо один раз, либо через определенные промежутки времени в течение заранее заданного периода времени может сравнивать GPS местонахождение транспортного средства с координатами, соответствующими рекомендуемой улице или другим возможным известным улицам (этап 259).
Данный способ может быть выполнен различными вариантами, а показанный здесь пример предназначен для демонстрации. Система также проверяет, соответствуют ли текущие координаты рекомендованному маршруту (этап 263), и, в случае, если не соответствуют, система проверяет, соответствуют ли эти координаты «известному» маршруту (в частности, альтернативному варианту улицы). В случае если координаты не соответствуют ни рекомендуемой улице, ни известному маршруту, система может перейти обратно на этап 251 или в качестве альтернативы, например, перейти обратно на этап 259 (не показано), продолжая проверку координат в течение установленного периода времени до достижения известного маршрута, и т.д.
В случае если текущие координаты транспортного средства соответствуют известному маршруту, который не является рекомендуемым, система будет искать маршрут для дальнейшего прохождения, исходя из текущего местонахождения транспортного средства (этап 265). Определение этого маршрута может быть выполнено, например, с использованием локально записанных картографических данных или при помощи установления соединения с удаленной сетью (если, например, локальных картографических данных недостаточно).
Как только маршрут становится известным, транспортное средство предоставляет следующий набор направлений движения пользователю (этап 257).
На Фиг.3 показан пример осуществления системы определения микро маршрутов.
По меньшей мере, в одном варианте осуществления настоящего изобретения данные, относящиеся к текущему местонахождению транспортного средства, передают из компьютерной системы транспортного средства в удаленную сеть. Однако в данном варианте осуществления изобретения компьютерная система транспортного средства не устанавливает прямое соединение с сетью. Вместо этого информацию передают через соединение с мобильным устройством, а мобильное устройство обеспечивает установку соединения с сетью. Кроме того, эта передача может быть выполнена на частотах выше частот передачи речи, так что диапазон рабочих частот может быть ограничен.
В то время как этот способ обеспечивает быстрое соединение, может происходить задержка в несколько секунд, прежде чем необходимая информация будет передана в сеть и обратно транспортному средству. Так как в это время транспортное средство может перемещаться, информация о местонахождении транспортного средства в момент отправки запроса в сеть может не соответствовать местонахождению транспортного средства в момент получения ответа на запрос.
Например, если транспортное средство перемещалось со скоростью 60 миль в часть по дороге, и произошла задержка в четыре секунды, транспортное средство будет находиться на 352 фута дальше по дороге к моменту получения ответа на запрос. Это может привести к проблемам, если выезд, к которому транспортное средство должно было свернуть, находилось в 250 футах от транспортного средства по дороге на момент отправки запроса. Транспортное средство также могло свернуть на объездную дорогу, по которой ранее не передвигалось, и т.д.
В примере, показанном на Фиг.3, транспортное средство 301 должно следовать по маршруту 303 для того, чтобы достичь нужного пункта назначения. То есть при оптимальных условиях транспортное средство будет продолжать движение прямо от текущего местонахождения, показанного на Фиг.3, в точке 301 и повернет в точке 309.
Если, однако, на пути следования транспортного средства находится здание, или в случае, если транспортное средство просто повернет (потому что водитель может выполнить непредвиденный поворот), может потребоваться изменение в инструкциях для транспортного средства.
В приведенном примере водитель транспортного средства получит сначала инструкции двигаться на восток по Улице A (A St) и затем повернуть налево на Вторую Авеню (2nd Ave). Эти инструкции могут быть получены в какой-то момент до достижения транспортным средством точки 301.
В точке 301 транспортное средство выдает запрос на обновление инструкций (в качестве части обычного взаимодействия с целью обеспечения целостности маршрута, например). К примеру, транспортное средство в настоящий момент двигается со скоростью 30 миль в час. К моменту отправки запроса инструкций в сеть и получения ответа транспортное средство отклоняется от намеченного маршрута и в настоящее время находится в точке 301а.
Если удаленная система только лишь отправляет обратно данные и инструкции для оптимального маршрута (то есть, двигаться по Улице А (A St.) до Второй Авеню (2nd Ave.)), может потребоваться отправка еще одного запроса в систему на основании нового местонахождения транспортного средства. Конечно, транспортное средство может снова поменять свое местонахождение во время ожидания запроса, что приведет к тому, что полученный набор направлений движения будет бесполезным.
Вместо этого, однако, в данном представленном варианте осуществления настоящего изобретения направление движения и скорость транспортного средства может быть передана параллельно с GPS координатами. Используя эту информацию, сеть может определить возможное местонахождение транспортного средства в момент возврата информации к компьютерной системе транспортного средства.
В данном представленном варианте осуществления настоящего изобретения система определяет на основании текущей скорости и направления движения, что транспортное средство может находиться в точке 313, 311, 309 или 307. Соответственно, направления движения (или, по меньшей мере, картографические данные) из этих точек к предпочтительному маршруту движения предоставлены компьютерной системе транспортного средства.
Таким образом, система может обеспечить точные направления движения к предпочтительному маршруту следования, независимо от того, к какой из четырех точек транспортное средство находится ближе всего.
Так, в показанном примере транспортное средство переместилось в точку 301а. Так как это положение является самым близким (и транспортное средство направлено в сторону движения к этой точке) к точке 311, компьютерная система транспортного средства предоставит водителю направление движения по маршруту 305 до его объединения с маршрутом 303 движения. Система может также изменить маршрут до пункта назначения на основании различных возможных точек местонахождения.
Кроме того, в данном показанном варианте осуществления настоящего изобретения возможные точки местонахождения находятся примерно на 180-градусной дуге перед транспортным средством. Это предотвращает передачу данных, относящихся ко всем возможным маршрутам в любом направлении, компьютерной системе транспортного средства. Этот способ является эффективным, если производитель предполагает, что транспортное средство редко будет неожиданно поворачивать больше чем на 180 градусов. Конечно, передача данных, относящихся к более широкому или узкому возможному диапазону возможных местонахождений, остается возможной.
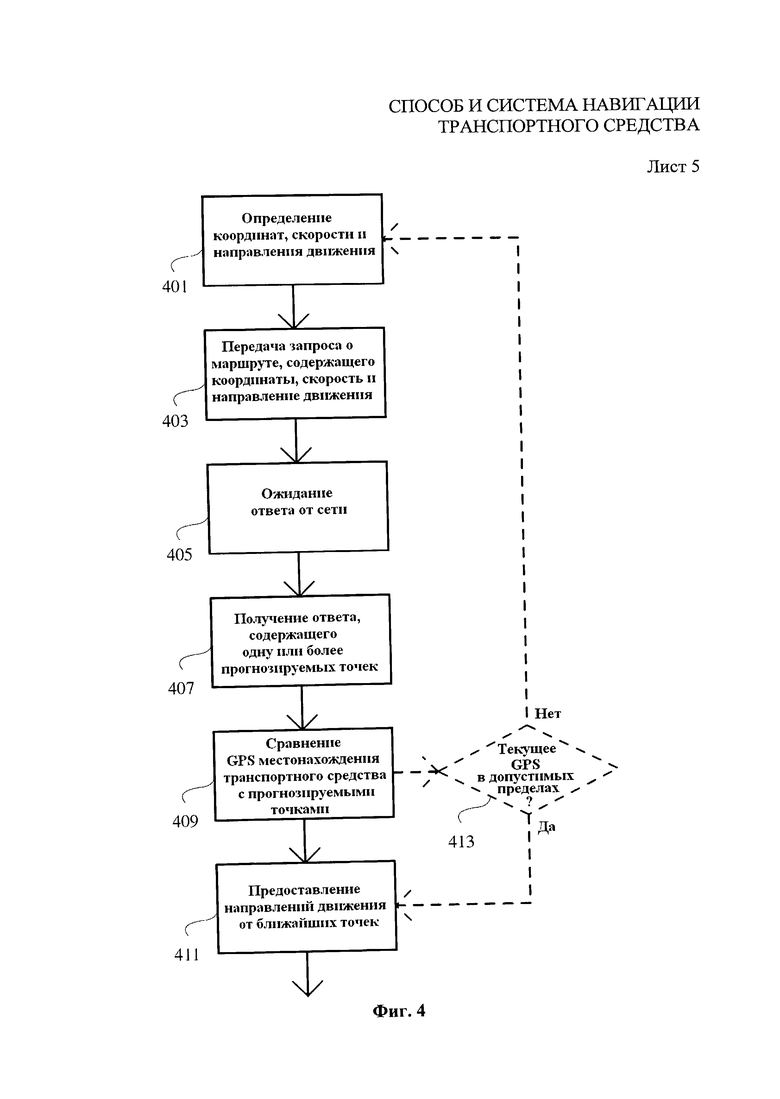
На Фиг.4 показан пример способа предоставления маршрута с использованием системы определения микромаршрутов.
В данном показанном варианте осуществления настоящего изобретения процессор компьютерной системы транспортного средства определяет координаты, скорость и направление движения транспортного средства (этап 401). Информация о скорости и направлении движения может быть обычно получена от шины сети локальных контроллеров (CAN) транспортного средства и ее часто предоставляют существующие системы транспортного средства.
GPS координаты могут быть получены, например, от встроенного устройства GPS. Координаты также могут быть получена от устройства GPS, соединенного с компьютерной системой транспортного средства при помощи проводного или беспроводного соединения. В другом варианте осуществления настоящего изобретения мобильное устройство, такое как сотовый телефон, может обеспечивать GPS координаты компьютерной системе транспортного средства.
После получения процессором координат, информации о скорости и/или направлении движения транспортного средства система передает некоторую часть или всю информацию в удаленную сеть.
В данном показанном варианте осуществления настоящего изобретения передачу удаленной сети выполняют через соединение с мобильным устройством. Система связи транспортного средства передает информацию мобильному устройству, а мобильное устройство передает информацию удаленной сети (этап 403).
Затем система ожидает ответа на запрос от удаленной сети (этап 405).
После обработки запрошенной информации удаленной сетью компьютерная система транспортного средства получает ответ на запрос (этап 407). Этот ответ включает одну или более прогнозируемых точек местонахождения транспортного средства. Это точки соответствуют звездочкам на Фиг.3.
Прогнозируемые точки местонахождения затем сравнивают с фактическим GPS положением транспортного средства на момент получения ответа (или на момент выполнения сравнения и т.д.). Если оценка сети является правильной или (по меньшей мере, в данном примере) транспортное средство не поворачивало более чем на 180 градусов, транспортное средство будет находиться, по меньшей мере, поблизости от одной из прогнозируемых точек местонахождения.
После того, как система определит, к какой из точек транспортное средство находится ближе всего, система выдает направления движения из этой точки. Предположительно, локальные картографические данные могут быть включены в информацию, таким образом, что если транспортное средство находится не в непосредственной близи от прогнозируемой точки, при необходимости также могут быть предоставлены направления движения до этой точки.
Если транспортное средство не находится поблизости от одной из прогнозируемых точек, система может запросить у сети еще один набор направлений движения с использованием той же информации. Этот вариант осуществления изобретения показан пунктирной линией на Фиг.4. Вместо того чтобы непосредственно перейти к предоставлению направлений движения от ближайшей прогнозируемой точки, система сначала проверяет, находятся ли GPS координаты в пределах допустимого расстояния от ближайшей прогнозируемой точки (этап 413). Если нет, система повторно отправляет запрос серверу, в противном случае будут предоставлены направления движения, как это показано в первом представленном варианте осуществления настоящего изобретения.
В то время как различные примерные, наглядные, не ограничивающие варианты осуществления изобретения были подробно описаны в настоящем разделе, специалисты в данной области техники могут найти различные альтернативные технические решения и варианты осуществления настоящего изобретения для применения настоящего изобретения, которые ограничены только следующей далее формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭФФЕКТИВНАЯ ЗАГРУЗКА НАВИГАЦИОННЫХ ДАННЫХ | 2011 |
|
RU2574426C2 |
| СИСТЕМА И СПОСОБ НАВИГАЦИИ ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2572936C2 |
| ДОСТАВКА, ОБРАБОТКА И ОБНОВЛЕНИЕ НОВОЙ КАРТОГРАФИЧЕСКОЙ ИНФОРМАЦИИ | 2011 |
|
RU2563104C2 |
| ДОСТАВКА, ОБРАБОТКА И ОБНОВЛЕНИЕ НОВОЙ КАРТОГРАФИЧЕСКОЙ ИНФОРМАЦИИ | 2011 |
|
RU2577548C2 |
| НАВИГАЦИОННОЕ УСТРОЙСТВО И СПОСОБ ДЛЯ ПРЕДОСТАВЛЕНИЯ ДОСТУПНОСТИ ПАРКОВОЧНЫХ МЕСТ | 2009 |
|
RU2519568C2 |
| СПОСОБ ОБРАБОТКИ ДАННЫХ ПОЗИЦИОНИРОВАНИЯ | 2008 |
|
RU2501087C2 |
| СИСТЕМА И СПОСОБ ДИСТАНЦИОННОГО НАБЛЮДЕНИЯ ЗА ТРАНСПОРТНЫМИ СРЕДСТВАМИ | 2014 |
|
RU2654502C2 |
| ИНФОРМАЦИЯ О ПОГОДНЫХ УСЛОВИЯХ НА ОСНОВЕ МАГНИТОМЕТРОВ | 2014 |
|
RU2582500C2 |
| СПОСОБ И СИСТЕМА ПЕРЕДАЧИ ЭКСТРЕННОГО ВЫЗОВА | 2008 |
|
RU2470375C2 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ОПРЕДЕЛЕНИЯ ИНФОРМАЦИИ О ПАРКОВКАХ | 2009 |
|
RU2516575C2 |
Изобретение относится к способам и системам навигации транспортного средства. Процессор компьютерной системы транспортного средства выполнен с возможностью получения координат от GPS устройства и передачи этих координат удаленной сети. Процессор также выполнен с возможностью получения картографических данных, относящихся к маршруту транспортного средства, в том числе о рекомендуемой стартовой улице. Процессор может в форме речи выдавать название рекомендуемой стартовой улицы, на которой в настоящий момент транспортное средство не находится, а также определить, достигло ли транспортное средство этой улицы. Процессор выполнен с возможностью выводить, по меньшей мере, начальные инструкции для прохождения маршрута. Обеспечивается точное направление движения к предпочтительному маршруту независимо от местоположения транспортного средства. 3 з.п. ф-лы, 5 ил. 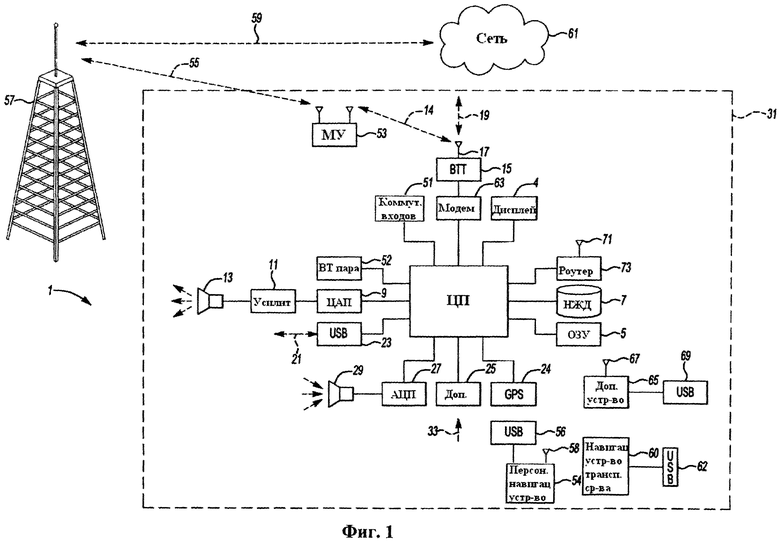
1. Компьютерная система транспортного средства для выполнения навигации, содержащая процессор, выполненный с возможностью:
(i) обеспечивать получение координат от GPS приемника и передавать эти координаты через канал связи мобильному устройству, расположенному поблизости от транспортного средства, для передачи в удаленную сеть;
(ii) в случае нахождения транспортного средства в месте, которое по данным системы GPS не соответствует ни одному конкретному положению на карте в компьютерной системе транспортного средства и поэтому не может быть использовано в качестве стартовой точки маршрута движения транспортного средства, получать от сети через канал связи картографические данные, относящиеся к маршруту, начинающемуся от стартовой улицы, по которой транспортное средство в настоящее время не передвигается, рекомендуемой на основе текущих координат транспортного средства;
(iii) при помощи аудиовыхода или дисплея предоставлять направляющие инструкции двигаться к рекомендуемой стартовой улице.
2. Компьютерная система по п.1, отличающаяся тем, что выбор рекомендуемой стартовой улицы основан по меньшей мере на направлении движения.
3. Компьютерная система по п.1, отличающаяся тем, что инструкции процессора двигаться к рекомендуемой стартовой улице включают в себя рекомендуемое направление движения по компасу.
4. Компьютерная система по п.1, отличающаяся тем, что процессор выполнен с возможностью определять на основании соответствия между текущим местонахождением транспортного средства и координатами, соответствующими улице, отличной от рекомендуемой стартовой улицы, события выезда транспортного средства на улицу, отличную от рекомендуемой стартовой улицы, причем процессор дополнительно выполнен с возможностью передавать эту информацию удаленной сети и получать направления движения с улицы, отличной от рекомендуемой стартовой улицы, для вывода пользователю.
| Котельная установка | 1988 |
|
SU1573296A2 |
| JP2004021503 А1, 22.01.2004. | |||

