Изобретение относится к области авиации, космонавтики и может быть использовано в устройствах для тренировок, имитирующих состояния, близких к перегрузкам в полете для пилотов и космонавтов, а также для тренировок спортсменов и выступающих в различных аттракционах со сложным комбинированным движением в пространстве, также может быть использовано в культурно-развлекательных мероприятиях.
Известен «тренажер для имитации перемещения и ориентации», патент RU 2520866, МПК G09B 9/12, опублик. 27.06.2014, БИ №18, состоящий из приводной установки, расположенной на прочном фундаменте, приводящей в движение гандолу салазок, при этом она выполнена крутильно-жесткой и может воспринимать большие усилия, причем действие гондолы салазок - это действие двустороннего рычага центрифуги, при этом салазки перемещаются вдоль гондолы салазок, совершающие вертикальные колебания, несущие карданный подвес, в центре карданного подвеса установлена кабина.
Недостатком данного тренажера являются вертикальные хаотичные колебания салазок вдоль гандолы, которые приводят к снижению качества и надежности устройства, а также невозможности регулировать заданные режимы в пространстве, что ограничивает технологические возможности тренажера, приводящие к снижению эффективности в целом.
Наиболее близким по технической сущности к заявленному изобретению и взятому в качестве прототипа является «аттракцион Абсолют», патент №2358789 RU, МПК A63G 31/02, автор изобретения Основин Е.В., опубл. от 20.06.2009, БИ №17, предназначенный для создания эффекта свободного падения при вращении. Изобретение состоит из стойки, на которую устанавливают вертикальные балки, по центру вертикальных балок закрепляют наружное кольцо, в наружное кольцо по горизонтали с помощью шарниров надевают промежуточное кольцо, а в промежуточное кольцо вдоль вертикали также с помощью шарниров устанавливают центральное кольцо, в центральное кольцо жестко устанавливают кабину-капсулу. Данная схема «аттракциона Абсолют» позволяет совершать вращательное движение в двух взаимно перпендикулярных плоскостях.
Недостаток данного технического решения заключается в том, что наружное, промежуточное и центральное кольца соединены между собой шарнирно и жестко относительно балок, что ограничивает функциональные возможности устройства, проявляющиеся в ограничении движения по траектории в пространстве, выполняющее только вращательное движение кабины, при этом наружное кольцо вращается с помощью привода, а два других кольца вращаются свободно (хаотично) под действием сил тяготения, что не дает возможности регулирования скорости и частоты вращения двух других колец, что снижает технологические возможности устройства с одновременным снижением качества и эффективности установки в целом.
Решаемой задачей изобретения является ограничение технологических возможностей устройства, не обеспечивающих регулирования угловых скоростей и угловых ускорений звеньев и капсулы в пространстве, снижающих функциональные возможности устройства, что в целом снижает эффективность сферического тренажера вестибулярного аппарата.
Техническим результатом изобретения является расширение технологических возможностей сферического тренажера, обеспечивающих регулирование угловых скоростей и угловых ускорений звеньев и капсулы в пространстве с одновременным расширением функциональных возможностей устройства, приводящих к повышению эффективности сферического тренажера вестибулярного аппарата.
Технический результат достигается тем, что в сферическом тренажере вестибулярного аппарата, состоящем из стойки, поддерживающей установку, звеньев, капсулы, соединенных шарнирами, привода, согласно которому, в качестве звеньев введены ведущий сферический кривошип, сферический шатун, ведущий сферический стержень, которые связаны между собой и капсулой шарнирно, оси которых выполнены с возможностью пересечения в одной точке, привод выполнен двухподвижным, состоящим из двух мотор-редукторов, закрепленных на стойке, при этом каждое звено выполнено в виде дуг, а капсула выполнена с возможностью вращения по окружности, относительно всех звеньев дуг, причем длины звеньев дуг выполнены неодинаковыми, зависящими от углов звеньев, при которых угол между осями шарниров, ведущего сферического стержня, капсулы и ведущего сферического кривошипа, выполнен меньшим углов между осями шарниров, ведущего сферического кривошипа и сферического шатуна, кроме того, капсула шарнирно соединена с одной стороны, через сферический шатун, с мотор-редуктором ведущего сферического кривошипа, с другой стороны капсула шарнирно соединена через ведущий сферический стержень, жестко соединенный с центральным валом мотор-редуктора ведущего сферического стержня, причем центральный вал мотор-редуктора ведущего сферического стержня расположен в полом валу зубчатого колеса шестерни и установлен с возможностью вращения один относительно другого, обеспечивая капсуле пространственно-сферические движения.
Технический результат достигается тем, что в сферическом тренажере вестибулярного аппарата каждый мотор-редуктор снабжен частотным преобразователем, управляемым компьютером.
Новизна
Предлагаемое изобретение позволяет создать эффективный сферический тренажер, за счет его конструктивного выполнения и введения двухподвижного механизма, расширяющих технологические возможности, позволяющие расширить функциональные возможности устройства, то есть повысить степень подвижности устройства и обеспечить регулирование переменными по величине и направлению угловыми скоростями и угловыми ускорениями капсулы в пространстве, получив при этом траекторию движения ее по сфере.
Степень подвижности определяется по формуле Чебышева (для плоских и сферических механизмов):
W=3(m-1)-2р1-1р2=3(5-1)-2⋅5-1⋅0=2,
где
m - число звеньев тренажера, а именно:
(ведущий сферический кривошип, сферический шатун, капсула, ведущий сферический стержень и стойка);
- p2=0 - количество двухподвижных кинематических пар;
- р1=5 - количество одноподвижных вращательных пар.
Вращательные пары находятся в точках A, B, C, D, E:
- в точке А соединены ведущий сферический кривошип и стойка
- в точке В соединены ведущий сферический стержень и стойка
- в точке С соединены ведущий сферический кривошип и сферический шатун
- в точке D соединены сферический шатун и капсула
- в точке Е соединены капсула и ведущий сферический стержень
С целью получения пространственного движения капсулы углы звеньев сферического тренажера вестибулярного аппарата должны удовлетворять условию Pierre М. La Rochelle:
αс+αкл<αш+αкр,
где:
αс - угол между осями шарниров ведущего сферического стержня;
αкл - угол между осями шарниров капсулы;
αш - угол между осями шарниров сферического шатуна;
αкр - угол между осями шарниров ведущего сферического кривошипа.
Так как углы капсулы и ведущего сферического стержня ≤90°, а угол сферического шатуна ≥90°, угол ведущего сферического кривошипа =90°, то дуги звеньев DE+ЕВ будут меньше дуг ВС+CD, тем самым обеспечивая возможность вращения дуг DE+ЕВ относительно дуг ВС+CD.
Для пояснения технической сущности предлагаемого сферического тренажера вестибулярного аппарата представлены чертежи:
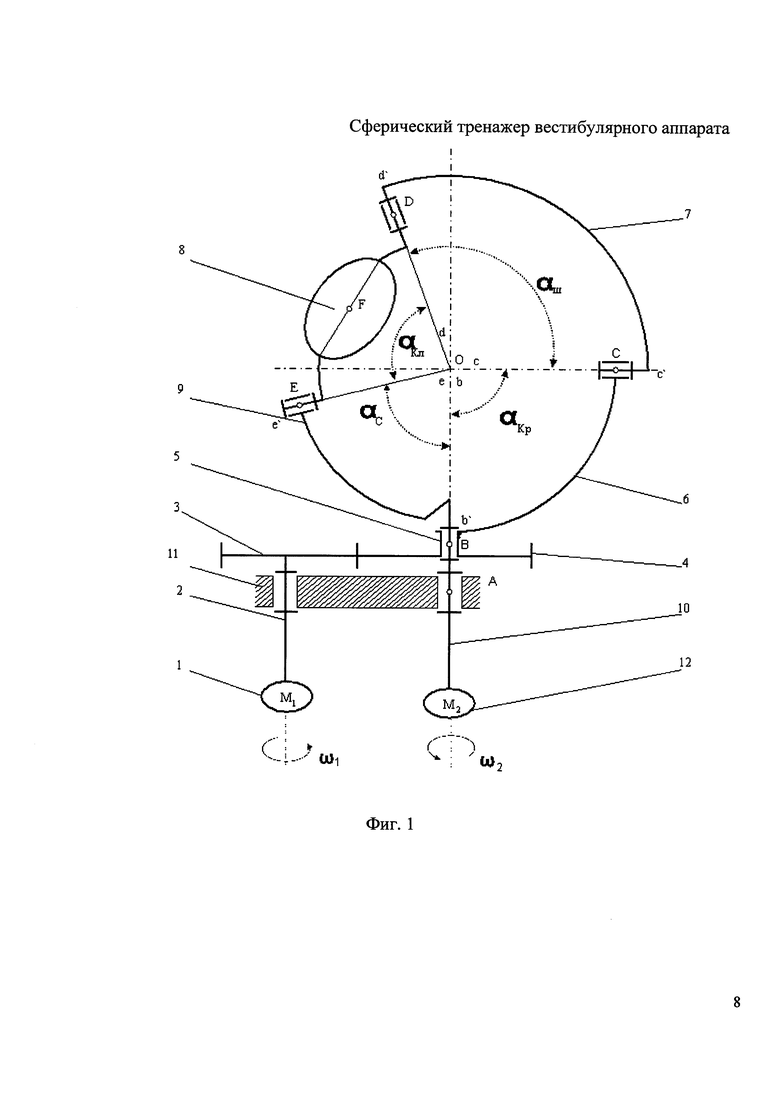
На Фиг. 1 - представлен общий вид сферического тренажера;
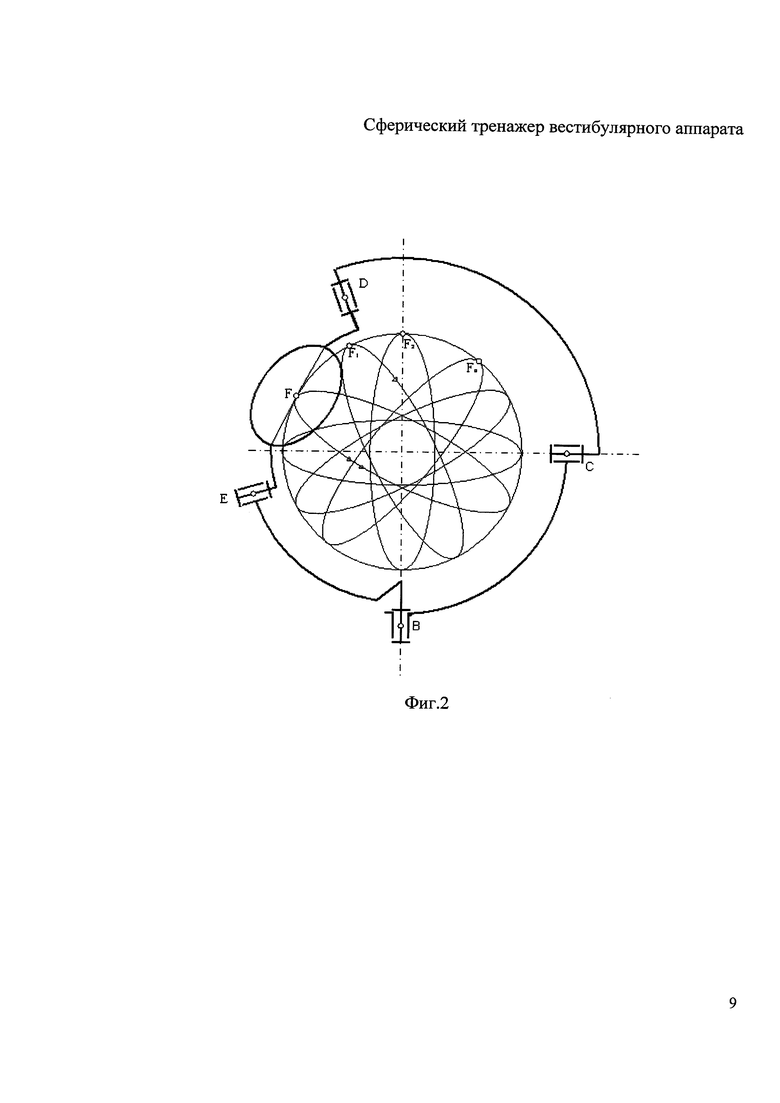
На Фиг. 2 - представлена траектория движения капсулы при работе обоих мотор-редукторов;
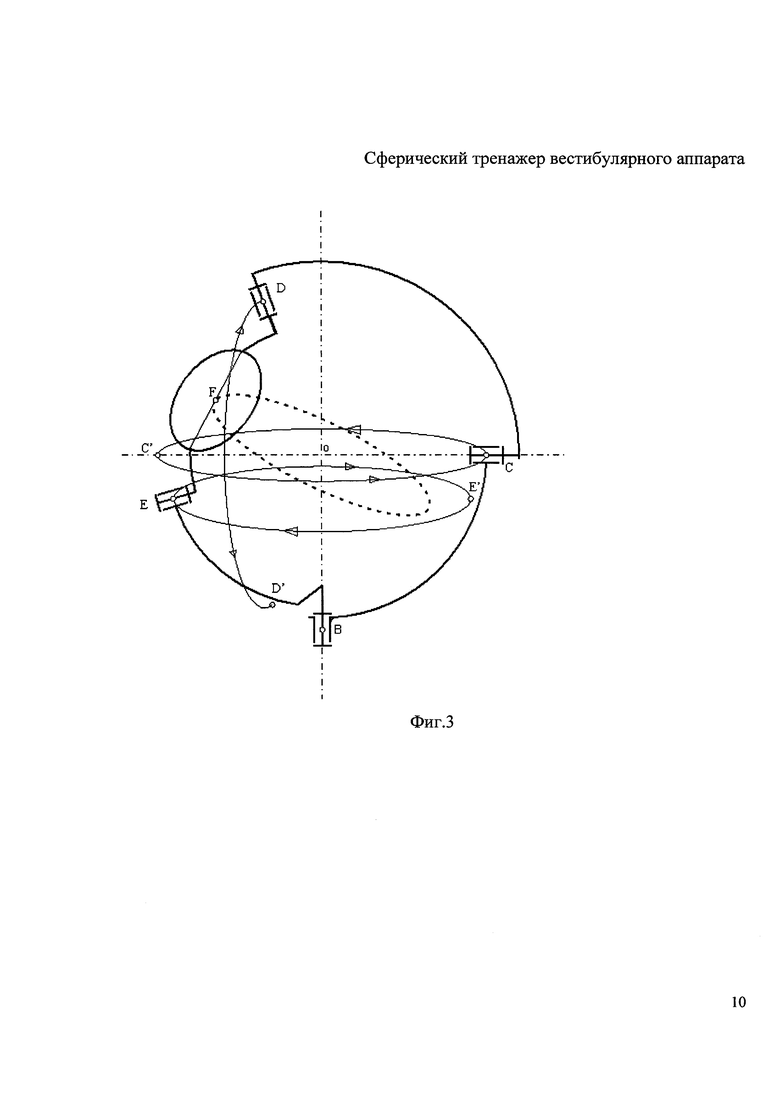
На Фиг. 3 - представлена траектория движения шарниров при работе обоих редукторов,
- где:
1 - мотор-редуктор ведущего сферического кривошипа; 2 - вал; 3 - шестерня; 4 - зубчатое колесо; 5 - полый вал; 6 - ведущий сферический кривошип; 7 - сферический шатун, 8 - капсула; 9 - ведущий сферический стержень; 10 - центральный вал; 11 - стойка; 12 - мотор-редуктор ведущего сферического стержня.
Сферический тренажер вестибулярного аппарата (фиг. 1) состоит из стойки 11, на которую с помощью шарнира А установлен центральный вал 10, связанный с мотор-редуктором ведущего сферического стержня 12. На центральный вал 10 жестко посажен сферический стержень 9, который при помощи шарнира (Е) соединен с капсулой 8, которая с помощью шарнира D соединена со сферическим шатуном 7. Причем сферический шатун 7 посредством шарнира С связан с ведущим сферическим кривошипом 6. Зубчатое колесо 4 и ведущий сферический кривошип 6 жестко посажены на полый вал 5, который установлен с помощью шарнира В на центральный вал 10. При этом эти валы могут вращаться один относительно другого. Зубчатое колесо 4 входит в зацепление с шестерней 3, которая посажена на вал 2 мотора-редуктора ведущего сферического кривошипа 6. При вращении оси шарниров всех звеньев, выполненных в форме дуг, то есть ведущего сферического кривошипа (bb' и cc'), сферического шатуна (dd' и cc'), капсулы (ee' и dd') и ведущего сферического стержня (ее' и bb') выполнены с возможностью пересечения в одной точке О.
Причем ведущий сферический кривошип 6 и ведущий сферический стержень 9 получают независимые вращательные движения относительно шарнира В, сообщая пространственное сферическое движение с переменными угловыми скоростями и угловыми ускорениями капсуле 8.
Сферический тренажер вестибулярного аппарата (Фиг. 1) работает с возможностью включения как одного из мотор-редукторов, так и обоих одновременно, с возможностью регулирования угловых скоростей.
Мотор-редуктор ведущего сферического кривошипа 1 через вал 2 и шестерню 3, которая входит в зацепление с зубчатым колесом 4, посаженным на полый вал 5, передает вращательное движение ведущему сферическому кривошипу 6, а сферический шатун 7, благодаря ведущему сферическому кривошипу 6, совершает вращательно-качательное движение по сфере, приводя капсулу 8 в движения, задавая ей вращение относительно шарнира Е, описывая траекторию движения в виде окружности с центром в точке F, при том, что сферический стержень остается неподвижным благодаря своему мотор-редуктору ведущего сферического стержня 12.
Мотор-редуктор ведущего сферического стержня 12 через центральный вал 10 передает вращательное движение ведущему сферическому стержню 9. Капсула 8 вращается относительно ведущего сферического стержня 9, описывая при этом траекторию движения в виде окружности, расположенной перпендикулярно ведущему сферическому кривошипу 6, и приводит в движение сферический шатун 7, который совершает вращательно-качательное движение в шарнире С, совершая работу в роли балансира, где ведущий сферический кривошип 6 остается неподвижным благодаря мотор-редуктору ведущего сферического кривошипа 1.
При одновременной работе обоих мотор-редукторов движение происходит следующим образом.
В качестве звеньев введены ведущий сферический кривошип 6, сферический шатун 7, ведущий сферический стержень 9, и связаны между собой и капсулой 8 шарнирно, оси которых выполнены с возможностью пересечения в одной точке, при этом привод выполнен двухподвижным, состоящим из пары мотор-редукторов 1, 12, закрепленных на стойке 11.
Сферический шатун 7, вращаясь относительно ведущего сферического кривошипа 6 в точке С, совершает вращательно-качательное движение, а одновременно ведущий сферический стержень 9, вращаясь, перемещает капсулу 8 относительно ведущего сферического кривошипа 6, при этом звенья выполнены в виде дуг, а капсула выполнена с возможностью вращения по окружности, относительно всех звеньев дуг, причем длины звеньев дуг выполнены неодинаковыми, зависящими от углов звеньев, при которых угол между осями шарниров, ведущего сферического стержня 9, капсулы 8 и ведущего сферического кривошипа 6, выполнен меньшим углов между осями шарниров ведущего сферического кривошипа 6 и сферического шатуна 7, кроме того, капсула шарнирно соединена с одной стороны, через сферический шатун, с мотор-редуктором ведущего сферического кривошипа 6, с другой стороны капсула 8 шарнирно соединена через ведущий сферический стержень 9, жестко соединенный с центральным валом 10 мотор-редуктора ведущего сферического стержня 12, причем центральный вал 10 мотор-редуктора ведущего сферического стержня 12 расположен в полом валу 5 зубчатого колеса 4, шестерни 3 и установлен с возможностью вращения один относительно другого, обеспечивая капсуле пространственно-сферическое движение.
Сферический шатун 7, вращаясь относительно ведущего сферического кривошипа 6 в точке С, совершает вращательно-качательное движение, а одновременно ведущий сферический стержень 9, вращаясь, перемещает капсулу 8 относительно ведущего сферического кривошипа, совершает как вращение по своим орбитам относительно стойки 11 и перемещает капсулу 8, на переменные по величине, так и по направлению угловые скорости и угловые ускорения, при этом звенья капсулы и ведущего сферического стержня, вращаясь относительно ведущего сферического кривошипа и сферического шатуна, задают ей пространственное движение, в виде траекторий, состоящих из множества окружностей с центром в точках от F1… до Fn,, обеспечивая капсуле пространственно-сферические движения (Фиг. 2).
По своим технико-экономическим преимуществам, по сравнению с известными аналогами, заявляемое техническое решение позволяет создать высокоэффективный сферический тренажер, благодаря конструктивному выполнению устройства, обеспечивающего повышенную степень подвижности, вращение и перемещение капсулы по окружности с центром в точке "О", с переменными по величине и направлению угловыми скоростями и угловыми ускорениями, расширяя технологические возможности с одновременным расширением функциональных возможностей тренажера, позволяющих капсуле получать пространственно-сферические движения, имитирующие состояния, близкие к перегрузкам в полете, а также для тренировок спортсменов и участвующих в различных аттракционах со сложными комбинированными движениями.
| название | год | авторы | номер документа |
|---|---|---|---|
| АЭРОТРЕНАЖЕР | 2018 |
|
RU2702826C1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ ВЕСТИБУЛЯРНОГО АППАРАТА | 2016 |
|
RU2639062C1 |
| КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ | 1996 |
|
RU2110718C1 |
| Устройство для перемешивания | 2022 |
|
RU2788075C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕШИВАНИЯ | 2011 |
|
RU2478473C1 |
| БАРАБАННЫЙ СМЕСИТЕЛЬ | 2013 |
|
RU2527993C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕШИВАНИЯ | 2013 |
|
RU2548087C1 |
| МЕХАНИЗМ ДЛЯ ВЫЧЕРЧИВАНИЯ ПРОСТРАНСТВЕННЫХ КРИВЫХ | 2017 |
|
RU2668414C1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ СПОРТСМЕНОВ | 2005 |
|
RU2289464C1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ ВЕСТИБУЛЯРНОГО АППАРАТА | 2015 |
|
RU2602056C2 |
Изобретение относится к области авиации, космонавтики и может быть использовано в устройствах для тренировок, имитирующих состояния, близкие к перегрузкам в полете для пилотов и космонавтов, а также для тренировок спортсменов и выступающих в различных аттракционах со сложным комбинированным движением в пространстве, также может быть использовано в культурно-развлекательных мероприятиях. Техническим результатом изобретения является расширение технологических возможностей сферического тренажера, обеспечивающих регулирование угловых скоростей и угловых ускорений звеньев и капсулы в пространстве с одновременным расширением функциональных возможностей устройства, приводящих к повышению эффективности сферического тренажера вестибулярного аппарата. Технический результат достигается тем, что в сферическом тренажере вестибулярного аппарата, состоящем из стойки 11, поддерживающей установку, звеньев, капсулы 8, соединенных шарнирами, привода, согласно которому, в качестве звеньев введены ведущий сферический кривошип 6, сферический шатун 7, ведущий сферический стержень 9, и связаны между собой и капсулой 8 шарнирно, оси которых выполнены с возможностью пересечения в одной точке, привод выполнен двухподвижным, состоящим из пары мотор-редукторов, закрепленных на стойке, при этом каждое звено выполнено в форме дуг, а капсула 8 выполнена с возможностью вращения по окружности, относительно всех звеньев дуг, причем длины звеньев дуг выполнены неодинаковыми, зависящими от углов звеньев, при которых угол между осями шарниров, ведущего сферического стержня 9, капсулы 8 и ведущим сферическим кривошипом 6, выполнен меньшим углов между осями шарниров, ведущего сферического кривошипа и сферического шатуна 7, кроме того, капсула 8 шарнирно соединена с одной стороны, через сферический шатун 7, с мотор-редуктором ведущего сферического кривошипа 6, с другой стороны капсула 8 шарнирно соединена через ведущий сферический стержень 9, жестко соединенный с центральным валом 10 мотор-редуктора ведущего сферического стержня 12, причем центральный вал 10 мотор-редуктора ведущего сферического стержня 12 расположен в полом валу 5 зубчатого колеса 4 шестерни 3 и установлен с возможностью вращения один относительно другого, обеспечивая капсуле 8, пространственно-сферические движения. Технический результат достигается тем, что в сферическом тренажере вестибулярного аппарата, каждый мотор-редуктор снабжен частотным преобразователем, управляемым компьютером. 1 з.п. ф-лы, 3 ил. 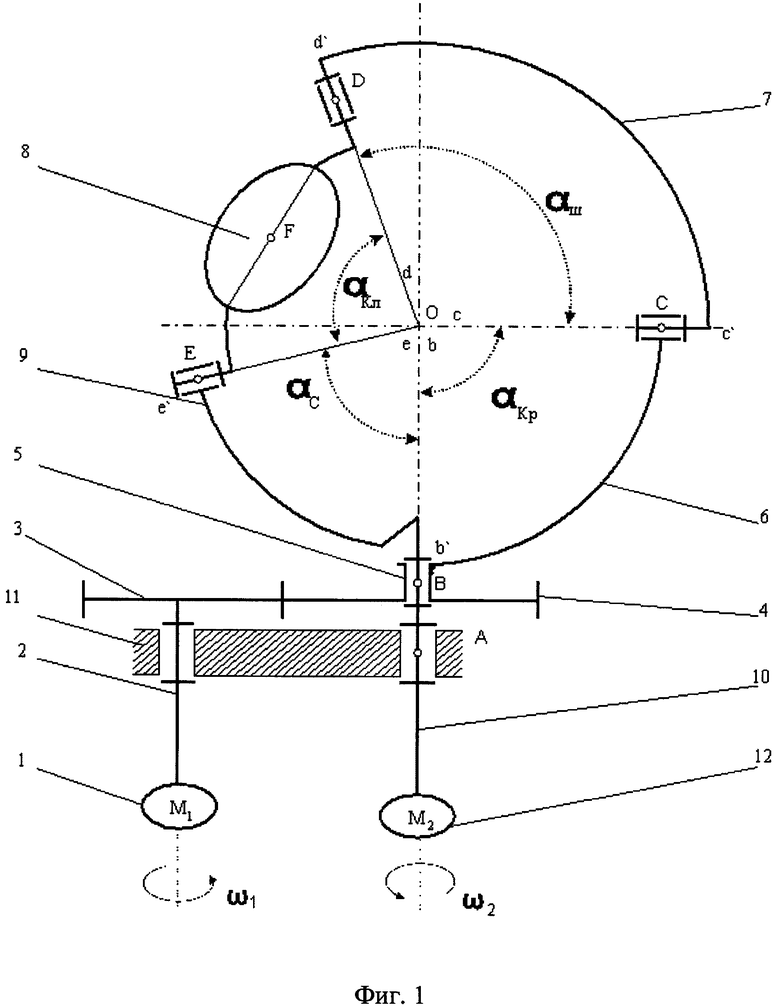
1. Сферический тренажер вестибулярного аппарата, состоящий из стойки, поддерживающей установку, звеньев, капсулы, соединенных шарнирами, привода, отличающийся тем, что в качестве звеньев введены ведущий сферический кривошип, сферический шатун, ведущий сферический стержень, которые связаны между собой и капсулой шарнирно, оси которых выполнены с возможностью пересечения в одной точке, привод выполнен двухподвижным, состоящим из двух мотор-редукторов, закрепленных на стойке, при этом каждое звено выполнено в виде дуг, а капсула выполнена с возможностью вращения по окружности, относительно всех звеньев дуг, причем длины звеньев дуг выполнены неодинаковыми, зависящими от углов звеньев, при которых угол между осями шарниров, ведущего сферического стержня, капсулы и ведущего сферического кривошипа, выполнен меньшим углов между осями шарниров, ведущего сферического кривошипа и сферического шатуна, кроме того, капсула шарнирно соединена с одной стороны, через сферический шатун, с мотор-редуктором ведущего сферического кривошипа, с другой стороны капсула шарнирно соединена через ведущий сферический стержень, жестко соединенный с центральным валом мотор-редуктора ведущего сферического стержня, причем центральный вал мотор-редуктора ведущего сферического стержня расположен в полом валу зубчатого колеса шестерни и установлен с возможностью вращения один относительно другого, обеспечивая капсуле пространственно-сферические движения.
2. Сферический тренажер вестибулярного аппарата по п. 1, отличающийся тем, что каждый мотор-редуктор снабжен частотным преобразователем, управляемым компьютером.
| SU 1360443 A1, 20.01.1996 | |||
| US 20150329223 A1, 19.11.2015 | |||
| АТТРАКЦИОН | 2007 |
|
RU2358789C1 |
| WO 8700142 A1, 15.01.1987. | |||

