Изобретение относится к передаточным рычажным механизмам, преобразующим вращательное движение ведущего кривошипа в прямолинейное возвратно-поступательное движение ведомого ползуна и использующимися в высоком классе машин.
Известен плоский четырехзвенный кривошипно-ползунный механизм (Артоболевский И.И. Механизмы в современной технике. Т. 2. Рычажные механизмы. Пособие для инженеров, конструкторов и изобретателей. - М.: Наука, 1971, с. 444), содержащий стойку с прямолинейной направляющей, установленный в направляющей ползун, шарнирно связанный со стойкой кривошип, шарнирно связанный с кривошипом и ползуном стержень. При этом центр шарнира, соединяющего стержень и ползун, расположен на продольной оси направляющей ползуна. Сила, передающаяся от кривошипа на ползун вдоль шарнирно присоединенного к нему стержня, имеет составляющую, перпендикулярную направляющей ползуна. Она представляет собой боковое давление на направляющую ползуна. Это давление приводит к износу контактирующих поверхностей ползуна и направляющей. Величина бокового давления и интенсивность износа пропорциональны величине угла между стержнем и продольной осью направляющей ползуна. В четырехзвенном кривошипно-ползунном механизме величина этого угла может быть значительной, что приводит к повышенному износу контактирующих поверхностей ползуна и направляющей. В результате снижается качество работы механизма и уменьшается его ресурс.
Наиболее близким к предлагаемому решению является плоский шестизвенный кривошипно-ползунный механизм Чебышева (Там же, с. 466). Механизм содержит стойку с прямолинейной направляющей, установленный в направляющий ползун, шарнирно связанный с ползуном стержень, шарнирно связанные со стойкой кривошип и коромысло, двуплечий шатун, шарнирно соединенный одним концом с кривошипом, другим - со стержнем, а в средней точке - с коромыслом. При этом все шарниры механизма - одноподвижные, центр шарнира, соединяющего стержень и ползун, расположен на продольной оси направляющего ползуна. Сила, передающаяся от кривошипа на ползун вдоль шарнирно присоединенного к нему стержня, имеет составляющую, перпендикулярную направляющей ползуна. Эта составляющая представляет собой боковое давление на направляющую. Она пропорциональна величине угла между стержнем и продольной осью направляющей ползуна.
В механизме Чебышева размеры звеньев подобраны таким образом, что траектория шарнира соединения стержня с двуплечим шатуном расположена вблизи продольной оси направляющей ползуна. Поэтому величина между стержнем и продольной осью направляющей ползуна в этом механизме меньше, чем в четырехзвенном кривошипно-ползунном механизме. Соответственно меньше боковое давление на направляющую. Однако в механизме Чебышева боковое давление на направляющую полностью исключить невозможно, так как величина указанного выше угла при работе механизма будет равна нулю лишь в некоторых положениях механизма. Таким образом, недостатком известного кривошипно-ползунного механизма Чебышева является наличие бокового давления на направляющую ползуна, приводящего к износу контактирующих поверхностей ползуна и направляющих.
В основу изобретения положена задача создать кривошипно-ползунный механизм, в котором полностью исключается боковое давление на направляющую ползуна за счет такого подбора параметров, при котором угол между стержнем и продольной осью направляющей ползуна равен нулю в любом положении механизма.
Поставленная задача решается тем, что в кривошипно-ползунном механизме, содержащем стойку с прямолинейной направляющей, шарнирно связанные со стойкой кривошип и коромысло, установленный в направляющей ползун, шарнирно связанный с ползуном стержня, двуплечий шатун, шарнирно соединенный одним концом с кривошипом, другим - со стержнем, а средней точкой - с коромыслом, и у которого шарниры соединения кривошипа со стойкой и коромысла с шатуном выполнены одноподвижными, ось шарнира соединения коромысла с шатуном перпендикулярна шатуну и коромыслу, центр шарнира соединения ползуна со стержнем расположен на продольной оси направляющей, а длины плеч шатуна равна длине коромысла, в нем двуплечий шатун выполнен прямолинейным, шарниры соединения кривошипа с шатуном, стержня с ползуном и с шатуном - сферическими, шарнир соединения коромысла со стойкой выполнен двухподвижным и установлен в точке пересечения плоскости вращения кривошипа с продольной осью направляющей, при этом ось шарнира соединения кривошипа со стойкой параллельна продольной оси направляющей ползуна, одна из взаимно перпендикулярных осей шарнира соединения коромысла со стойкой параллельна оси шарнира соединения коромысла с шатуном, другая - совпадает с продольной осью направляющей ползуна.
За счет установки в заявляемом механизме сферических шарниров между кривошипом и шатуном, между стержнем и ползуном, между стержнем и шатуном, установки двухподвижного шарнира между коромыслом и стойкой, а также за счет определенного взаимного расположения всех шарниров и определенной ориентации их осей угол между стержнем и продольной осью направляющей ползуна равен нулю в любом положении механизма. В связи с этим сила, передающаяся от кривошипа на ползун, всегда совпадает с продольной осью направляющей ползуна. Тем самым полностью исключается боковое давление на направляющую ползуна.
Равенство нулю угла между стержнем и продольной осью направляющей ползуна и соответственно исключение бокового давления на направляющую ползуна обусловлены следующим.
В заявленном механизме ось шарнира соединения кривошипа и стойки параллельна продольной оси направляющей ползуна, проходящей через центр шарнира соединения стержня с ползуном, а центр шарнира, связывающего коромысло со стойкой, установлен в точке пересечения продольной оси направляющей ползуна с плоскостью вращения кривошипа. Из этого следует, что плоскость вращения кривошипа в любом положении механизма перпендикулярна продольной оси направляющей ползуна, а прямая, проходящая через центры шарниров, связывающих кривошип с шатуном и коромысло со стойкой, расположена в плоскости вращения кривошипа и поэтому она перпендикулярна продольной оси направляющей ползуна. Обеспечение данного условия в заявляемом механизме на основании известного свойства эллипсографа приводит к тому, что в любом положении механизма центр шарнира соединения шатуна и стержня расположен на продольной оси направляющей ползуна. В связи с этом получается, что центры обоих шарниров стержня, соединяющего его с шатуном и с ползуном, всегда расположены на продольной оси направляющей ползуна. Поэтому угол между стержнем и продольной осью направляющей ползуна равен нулю и в любом положении механизма. Следовательно, сила, передающаяся на ползун со стороны кривошипа вдоль стержня, всегда направлена по продольной оси направляющей ползуна, боковое давление на направляющую ползуна полностью исключается.
Для подтверждения возможности осуществления изобретения рассмотрим шестизвенный кривошипно-ползунный механизм для поршневого компрессора.
На чертеже изображена схема заявляемого механизма в системе координат OXYZ.
Кривошипно-ползунный механизм состоит из стойки 1 с прямолинейной направляющей 2, продольная ось которой параллельна оси Y, кривошипа 3, коромысла 4, установленного в направляющей ползуна 5, стержня 6, двуплечего шатуна 7. Длины плеч шатуна 7 равны длине коромысла 4. Звенья механизма соединены между собой шарнирами. Шарнир 8 соединения кривошипа со стойкой и шарнир 9 соединения коромысла с шатуном выполнены одноподвижными, шарнир 10 соединения коромысла со стойкой - двухподвижным (сферический шарнир с пальцем), шарнир 11 соединения кривошипа с шатуном и шарниры 12 и 13 соединения стержня соответственно с шатуном и с ползуном - сферическими. Центр шарнира 10 расположен в точке пересечения плоскости OXZ с продольной осью направляющей 2. Центр шарнира 13 расположен на продольной оси направляющей 2. Оси шарниров ориентированы определенным образом относительно системы координат OXYZ и звеньев механизма. Ось шарнира 8 совпадает с осью OY, при этом плоскость вращения кривошипа совпадает с плоскостью OXY. Ось шарнира 9 перпендикулярна к коромыслу 4 и шатуну 7. Оси 1 и 11 шарнира 10 взаимно перпендикулярны, ось 1 (нормаль плоскости прорези пальца) совпадает с продольной осью направляющей 2, ось 11 (продольная ось пальца) параллельна оси шарнира 9.
В связи с тем, что ось шарнира 8 параллельна продольной направляющей ползуна 5, а центр шарнира 10 установлен в точке пересечения направляющей ползуна с плоскостью OXY вращения кривошипа 3, плоскость OXY в любом положении механизма перпендикулярна продольной оси направляющей ползуна, а прямая, проходящая через центры шарниров 10 и 11, расположенная в плоскости OXZ, поэтому она перпендикулярна продольной оси направляющей ползуна. Обеспечение этого условия в сочетании с тем, что длины плеч прямолинейного шатуна 7 равны длине коромысла 4, что шарнир 11 выполнен сферическим, шарнир 9 выполнен одноподвижным с осью вращения, перпендикулярной коромыслу 4 и шатуну 7, шарнир 10 выполнен двухподвижным, причем его ось 1 совпадает с продольной осью направляющего ползуна 5, а ось 11 параллельна оси шарнира 9, приводит к следующему. При любом положении механизма центр шарнира 12 на основании известного свойства механизма эллипсографа расположен на продольной оси направляющей ползуна 5, проходящей через центр шарнира 13. Из этого следует, что угол между стержнем 6 и продольной осью направляющей ползуна 5 равен нулю в любом положении механизма, а сила, передающаяся со стороны кривошипа 3 вдоль стержня 6, всегда направлена по продольной оси направляющей ползуна 5 - боковое давление на направляющую полностью исключается.
Механизм работает следующим образом.
При поворачивании кривошипа 3 вокруг оси шарнира 8 приводятся в движение шатун 7, коромысло 4, стержень 6 и ползун 5. При этом стержень 6 перемещается поступательно, оставаясь расположенным вдоль продольной оси направляющей 2. Силовая нагрузка, приложенная к кривошипу 3, передается с помощью шатуна 7 и коромысла 4 к шарниру 12, а от коромысла 12 - вдоль стержня 6 к ползуну 5, сила, передающаяся на ползун 5, всегда направлена вдоль продольной оси направляющей 2 и не вызывает бокового давления на направляющую 2.
Использование заявляемого решения исключает боковое давление на направляющую ползуна, что приводит к уменьшению износа контактирующих поверхностей направляющей и ползуна в кривошипно-ползунных механизмах.
| название | год | авторы | номер документа |
|---|---|---|---|
| ШАРНИРНЫЙ ПРЯМОЛИНЕЙНО НАПРАВЛЯЮЩИЙ МЕХАНИЗМ | 1993 |
|
RU2075672C1 |
| ОППОЗИТНЫЙ КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ | 1995 |
|
RU2085791C1 |
| ШАРНИРНЫЙ ЧЕТЫРЕХЗВЕННИК | 1994 |
|
RU2087779C1 |
| ОППОЗИТНЫЙ КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ | 1998 |
|
RU2149298C1 |
| ПРОСТРАНСТВЕННЫЙ ШАРНИРНЫЙ НАПРАВЛЯЮЩИЙ МЕХАНИЗМ | 2008 |
|
RU2404385C2 |
| ОППОЗИТНЫЙ КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ | 1998 |
|
RU2148744C1 |
| РЕВЕРСИВНЫЙ КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ | 2011 |
|
RU2479768C1 |
| ШЕСТИЗВЕННЫЙ ШАРНИРНЫЙ МЕХАНИЗМ | 2007 |
|
RU2338104C1 |
| МНОГОКРАТНЫЙ ШАРНИРНЫЙ ПАРАЛЛЕЛОГРАММ | 2006 |
|
RU2331805C1 |
| БУЛЬДОЗЕРНОЕ ОБОРУДОВАНИЕ | 1994 |
|
RU2076174C1 |
Изобретение относится к передаточным рычажным механизмам, преобразующим вращательное движение ведущего кривошипа в прямолинейное возвратно-поступательное движение ведомого ползуна и использующимся в широком классе машин. Кривошипно-ползунный механизм содержит стойку с прямолинейной направляющей, шарнирно связанные со стойкой кривошип и коромысло, установленный в направляющей ползун, шарнирно связанный с ползуном стержень, двуплечий шатун, выполненный прямолинейным, а шарниры соединения кривошипа с шатуном, стержня с ползуном и шатуном - сферические, шарнир соединения коромысла со стойкой выполнен двухподвижным и установлен в точке пересечения плоскости вращения кривошипа с продольной осью направляющей ползуна, при этом ось шарнира соединения кривошипа со стойкой параллельна продольной оси направляющей ползуна, одна из взаимно перпендикулярных осей шарнира соединения коромысла со стойкой параллельна оси шарнира соединения коромысла с шатуном, другая совпадает с продольной осью направляющей ползуна. 1 ил.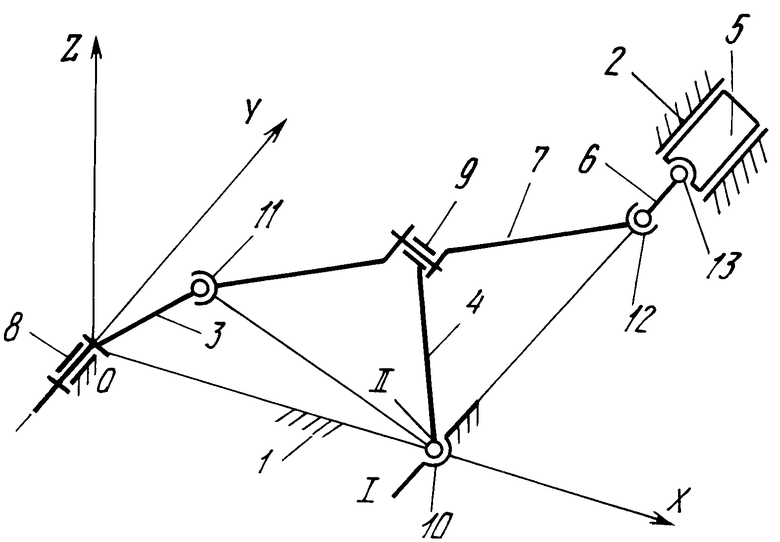
Кривошипно-ползунный механизм, содержащий стойку с прямолинейной направляющей, шарнирно связанные со стойкой кривошип и коромысло, установленный в направляющей ползун, шарнирно связанный с ползуном стержень, двуплечий шатун, шарнирно соединенный одним концом с кривошипом, другим - со стержнем, а средней точкой - с коромыслом, при этом шарниры соединения кривошипа со стойкой и коромысла с шатуном выполнены одноподвижными, ось шарнира соединения коромысла с шатуном перпендикулярна шатуну и коромыслу, центр шарнира соединения ползуна со стержнем расположен на продольной оси направляющей ползуна, а длины плеч шатуна равны длине коромысла, отличающийся тем, что двуплечий шатун выполнен прямолинейным, а шарниры соединения кривошипа с шатуном, стержня с ползуном и с шатуном - сферические, шарнир соединения коромысла со стойкой выполнен двухподвижным и установлен в точке пересечения плоскости вращения кривошипа с продольной осью направляющей ползуна, при этом ось шарнира соединения кривошипа со стойкой параллельна продольной оси направляющей ползуна, одна из взаимно перпендикулярных осей шарнира соединения коромысла со стойкой параллельна оси шарнира соединения коромысла с шатуном, другая совпадает с продольной осью направляющей ползуна.
| Артоболевский И.И | |||
| Механизмы в современной технике | |||
| Т | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Рычажные механизмы | |||
| Пособие для инженеров, конструкторов и изобретателей | |||
| - М.: Наука, 1971, с | |||
| Электромагнитное реле | 1922 |
|
SU466A1 |

