Изобретение относиться к области авиации и космонавтики, в частности к устройствам тренажеров имитации полета, а также может быть использовано для развлечения в роли симулятора игровых полетов.
Известен «аттракцион Абсолют», патент №2358789 RU, МПК A63G 31/02, опублик. от 20.06.2009 БИ №17, предназначенный для создания эффекта свободного падения при вращении, состоящий из стойки, на которую устанавливают вертикальные балки, по центру вертикальных балок закрепляют наружное кольцо, в наружное кольцо по горизонтали с помощью шарниров надевают промежуточное кольцо, а в промежуточное кольцо вдоль вертикали также с помощью шарниров устанавливают центральное кольцо, в центральное кольцо жестко устанавливают кабину-капсулу. Данная схема «аттракциона Абсолют» позволяет совершать вращательное движение в двух взаимно перпендикулярных плоскостях.
Недостаток данного технического решения заключается в том, что наружное, промежуточное и центральное кольца соединены между собой шарнирно и жестко относительно балок, что ограничивает движение по траектории в пространстве. Аттракцион выполняет только вращательное движение кабины, при том наружное кольцо вращается на приводе, а два других кольца вращаются свободно (хаотично) под действием сил тяготения, что не дает возможности регулирования скорости и частоты вращения двух других колец, что снижает функциональные возможности устройства с одновременным снижением качества и эффективности тренажера в целом.
Наиболее близким по технической сущности к заявленному изобретению и взятому в качестве прототипа является «сферический тренажер вестибулярного аппарата», патент №2640990 RU, МПК A63G 31/02, А63В 23/02, 025, G09B 9/08, 9/10, B64G 7/00, опубл. Бил №2 от 02.02.2017, состоящий из стойки, на которую устанавливают два ведущих звена кривошип и стержень, а на другой конец этих звеньев с помощью шарниров устанавливают шатун и капсулу, которые соединены между собой шарниром, где оси всех шарниров выполнены с возможностью пересечения в одной точке. Конструкция тренажера позволяет совершать пространственное движение и вращение капсулой не полностью описывающей поверхность сферы, образуя траекторией форму вазы, также повторяя пересечение траектории образующих пространственные восьмерки, тем самым ограничивается полная эффективность имитирования полета в целом.
Недостаток данного технического решения заключается в конструкции данного тренажера, при которой ведущие звенья кривошипа и стержня вращаются относительно друг друга. Ведущие звенья задают движение и вращение капсуле с помощью сферического шатуна (балансира), который совершает вращательно-качательное движение в роли балансира относительно ведущего кривошипа, в данном случае капсула является шатуном полнооборотного вращения и движения в пространстве, которая вращается внутри ведущего стержня и шатуна (балансира), которая двигаясь в пространстве описывает траекторию в виде вазы, при этом капсула не совершает полнооборотного движения по всецелой поверхности сферы, и вращаясь, в движении капсула выполняет пространственные восьмерки, что ограничивает пространственную область движения капсулы и делает траекторию движения капсулы ограниченной по всецелой поверхности сферы, что снижет функциональные возможности тренажера, с одновременным снижением качества имитирования полета.
Решаемой технической задачей изобретения является создание эффективного аэро-тренажера, за счет расширения функциональных возможностей путем вращения и полнооборотного движения капсулы тренажера в пространственной области полной сферы.
Технический результат достигается тем, что в аэро-тренажере, состоящем из стойки, поддерживающей установку, капсулы, приводов установленных на стойке, звеньев кривошипа, шатуна и стержня, выполненных в форме квадрантов круга, вращающиеся по своим окружностям и соединенных между собой шарнирами, где оси выполнены с возможностью пересечения в центре тренажера, согласно которому, введено звено в виде балансира расположенный между звеньями ведущего кривошипа и капсулы, причем капсула выполнена в виде звена и соединена одним концом на наружной поверхности звеньев, балансира и ведущего кривошипа, а другим концом на внутренней поверхности звеньев ведущего стержня и шатуна, причем радиусы наружных и внутренних звеньев выполнены неравными между собой, при этом радиус ведущего стержня внутреннего звена выполнен больше радиуса шатуна, для вращения по своим окружностям относительно друг друга, а радиус ведущего кривошипа внешнего звена выполнен больше радиуса балансира, для возвратно-вращательного движения относительно ведущего кривошипа.
Технический результат достигается тем, что в аэро-тренажере, между валами ведущих звеньев стержня и кривошипа и их мотор-редукторов установлены самоуправляемые автоматические муфты для определенных режимов работы управляемых компьютером.
Новизна:
Предлагаемое изобретение позволяет создать эффективный и многофункциональный тренажер, состоящий из: ведущего кривошипа, ведущего стержня, балансира, шатуна и капсулы, оси шарниров которых пересекаются в одной точке и движутся по траектории поверхности своих сфер и введения звена в виде балансира, который расположен между звеньями кривошипа и капсулы, причем капсула выполнена в виде звена и соединена одним концом на наружной поверхности звеньев, балансира и ведущего кривошипа, а другим концом на внутренней поверхности звеньев ведущего стержня и шатуна, причем радиусы наружных и внутренних звеньев выполнены неравными между собой, при этом получая траекторию движения и вращения капсулы тренажера расширенной, (в пространственной области) до полной сферы.
Степень подвижности определяется по формуле пространственных механизмов, так как тренажер состоит из двух пространственных механизмов:
W=6(n-1)-5р1+S=6⋅(4-1)-5⋅4+3=1
Wсф=2⋅W=2⋅1=2
где n - число звеньев механизма, а именно: (кривошип, шатун, балансир и стойка);
- p1=4 - количество одноподвижных вращательных пар
- S=3 - число согласованных размеров для четырехзвенных механизмов
Вращательные пары находятся в точках A, B, C, D, F, M:
 в точке А соединены ведущий стержень и стойка
в точке А соединены ведущий стержень и стойка
в точке В соединены ведущий стержень и шатун
в точке С соединены ведущий шатун и капсула
в точке D соединены капсула и балансир
в точке F соединены балансир и ведущий кривошип
в точке М соединены ведущий кривошип и стойка
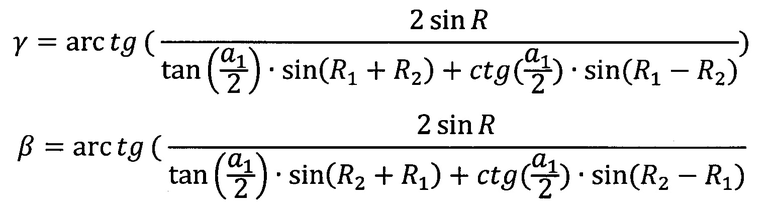
Для определения размера звена можно воспользоваться формулой для сферических треугольников по двум сторонам и углу между ними и определить размер дуги а и дополнительные углы γ и β:
а=arccos(cosR1⋅cosR2+sinR1⋅sinR2⋅cosa1)
Для пояснения технической сущности предлагаемого аэро-тренажера представлены чертежи:
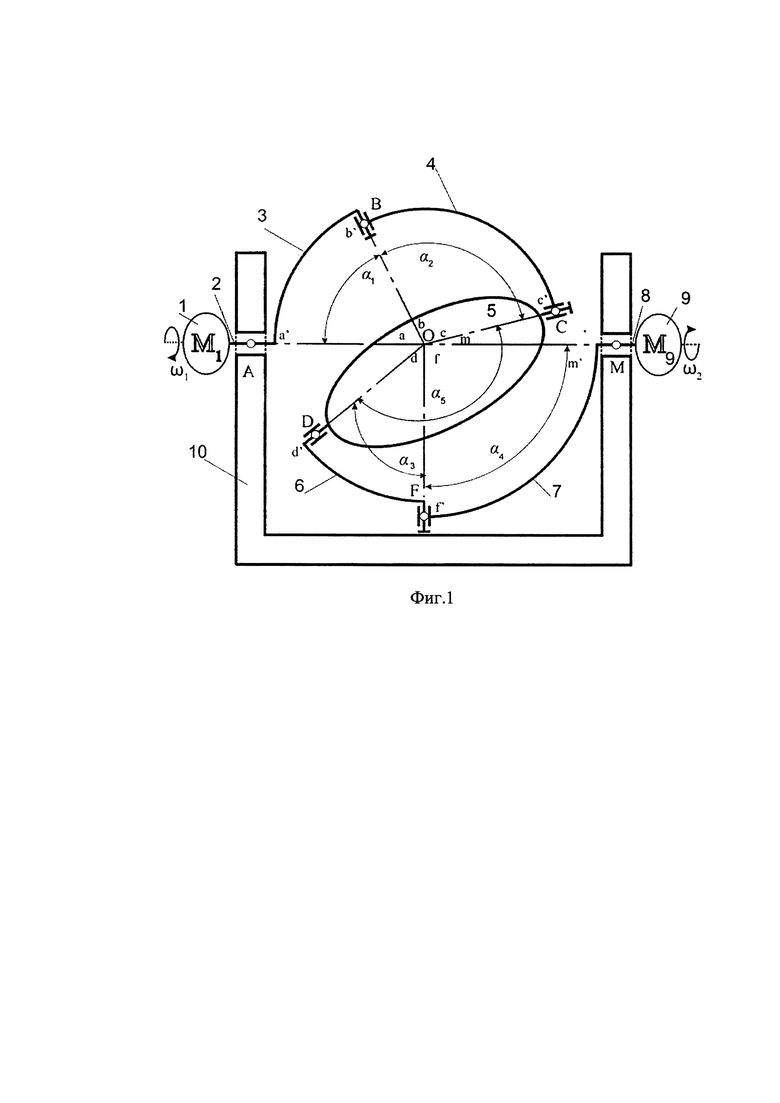
Фиг. 1 - общий вид аэро-тренажера;
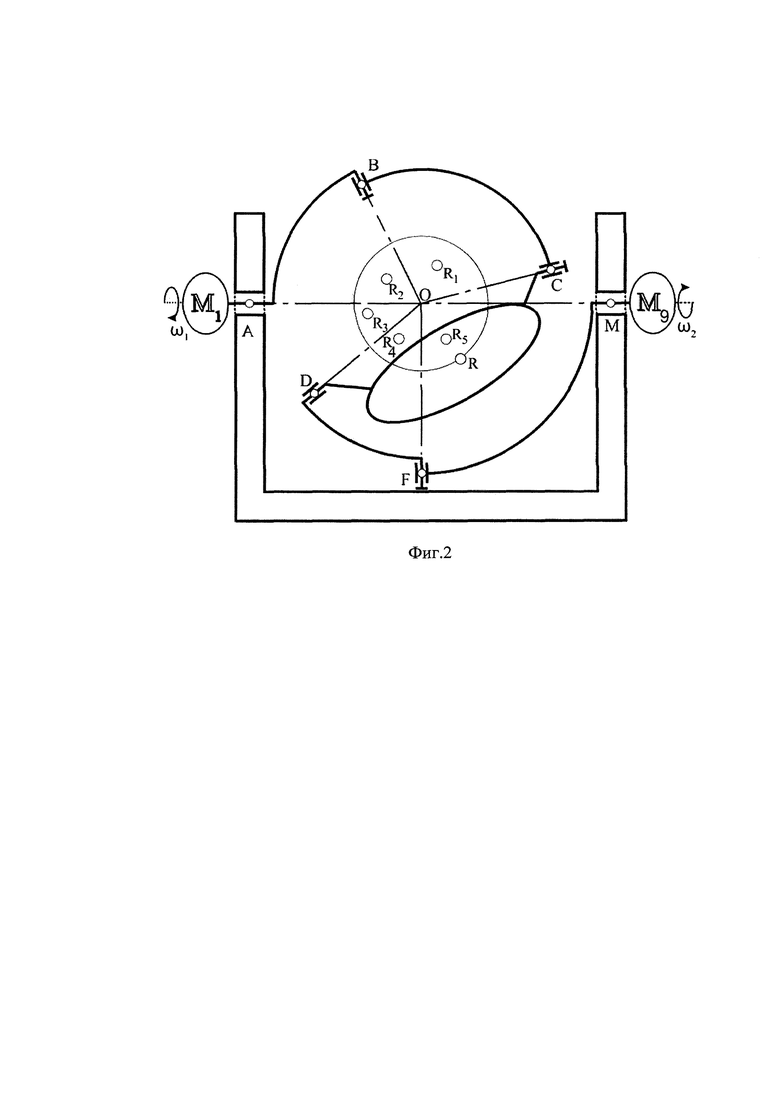
Фиг. 2 - траектория движение капсулы по сфере;
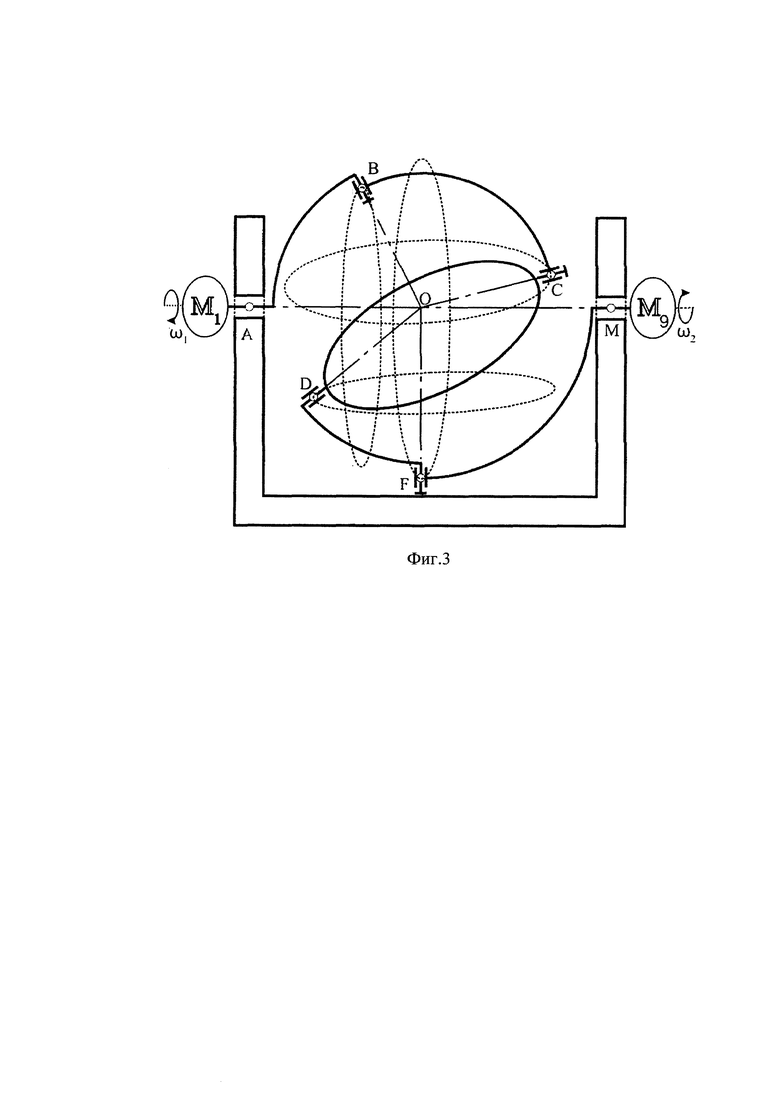
Фиг. 3 - траектория движения всех подвижных шарниров;
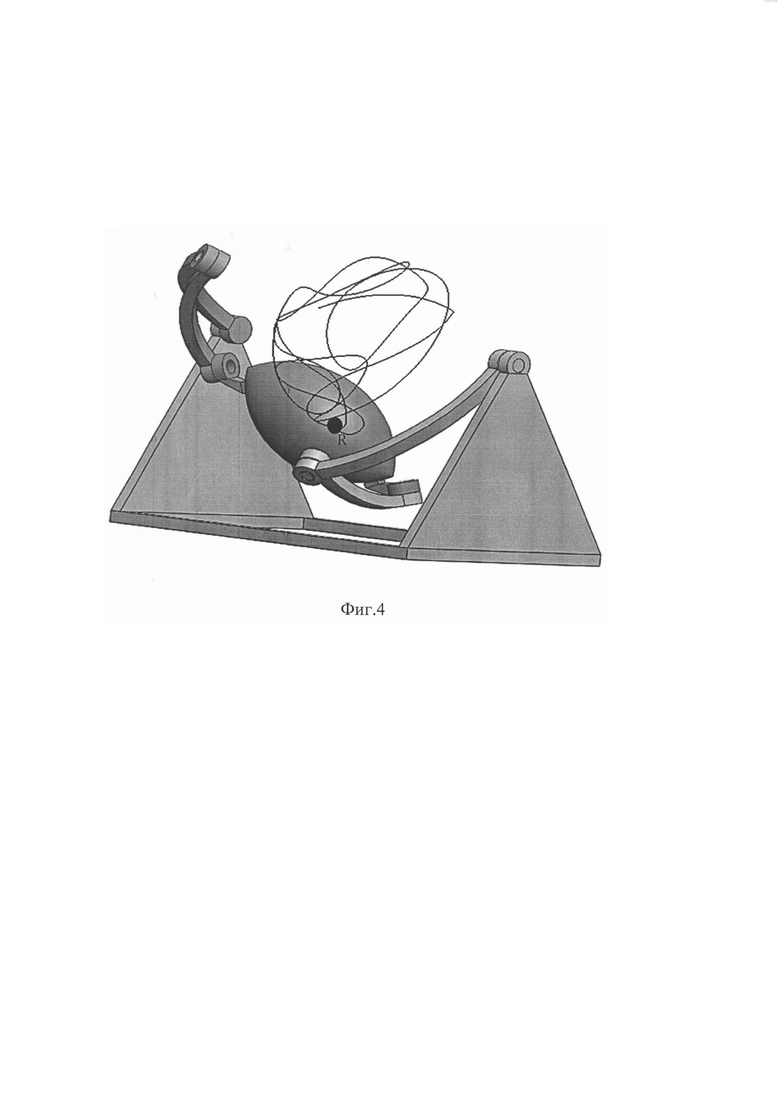
Фиг. 4 - траектория движения капсулы при работе привода ведущего стержня, с заблокированным ведущим кривошипом;
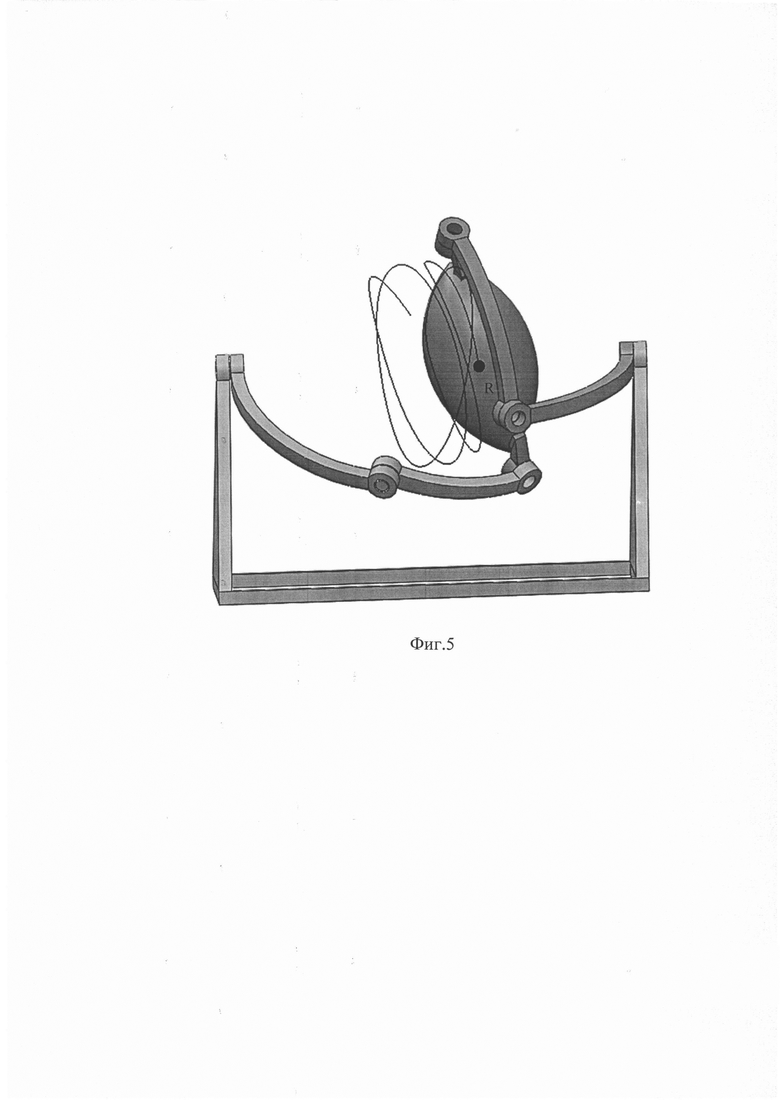
Фиг. 5 - траектория движения и вращения капсулы при работе привода ведущего стержня, и свободном вращении ведущего кривошипа;
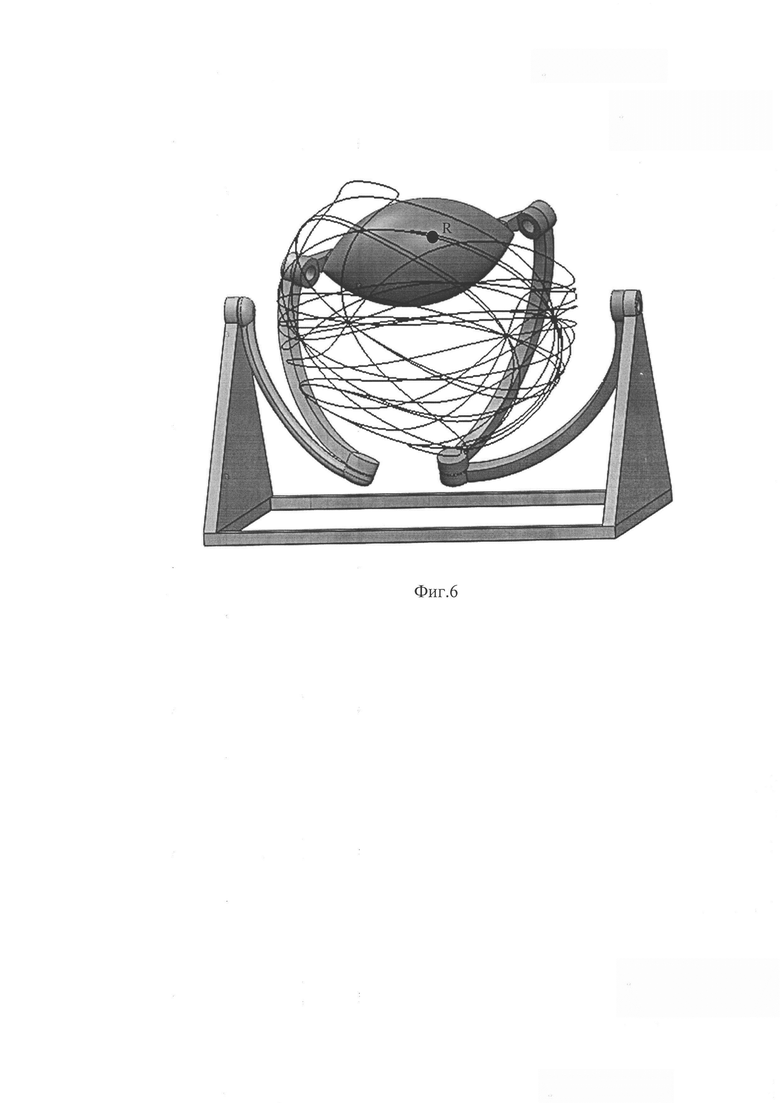
Фиг. 6 - движения и вращения капсулы при работе привода ведущего кривошипа, при заблокированном ведущем стержне;
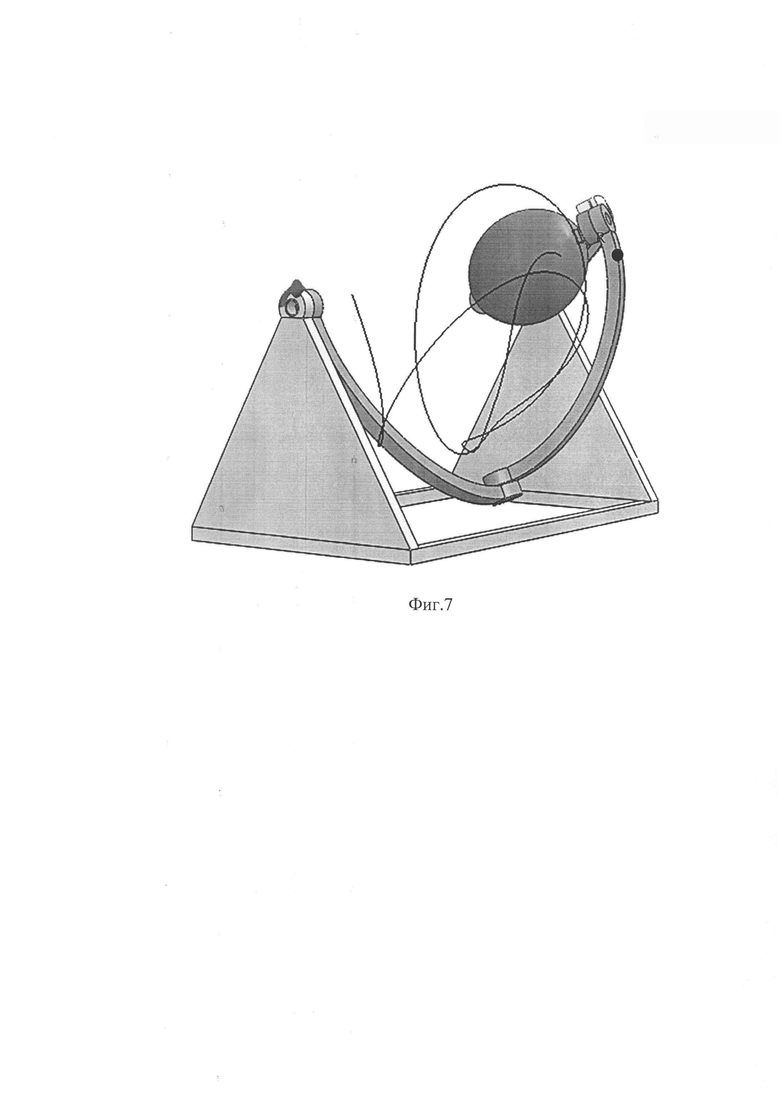
Фиг. 7 - траектория движения и вращения капсулы при работе привода ведущего кривошипа, при свободном вращении ведущего стержня;
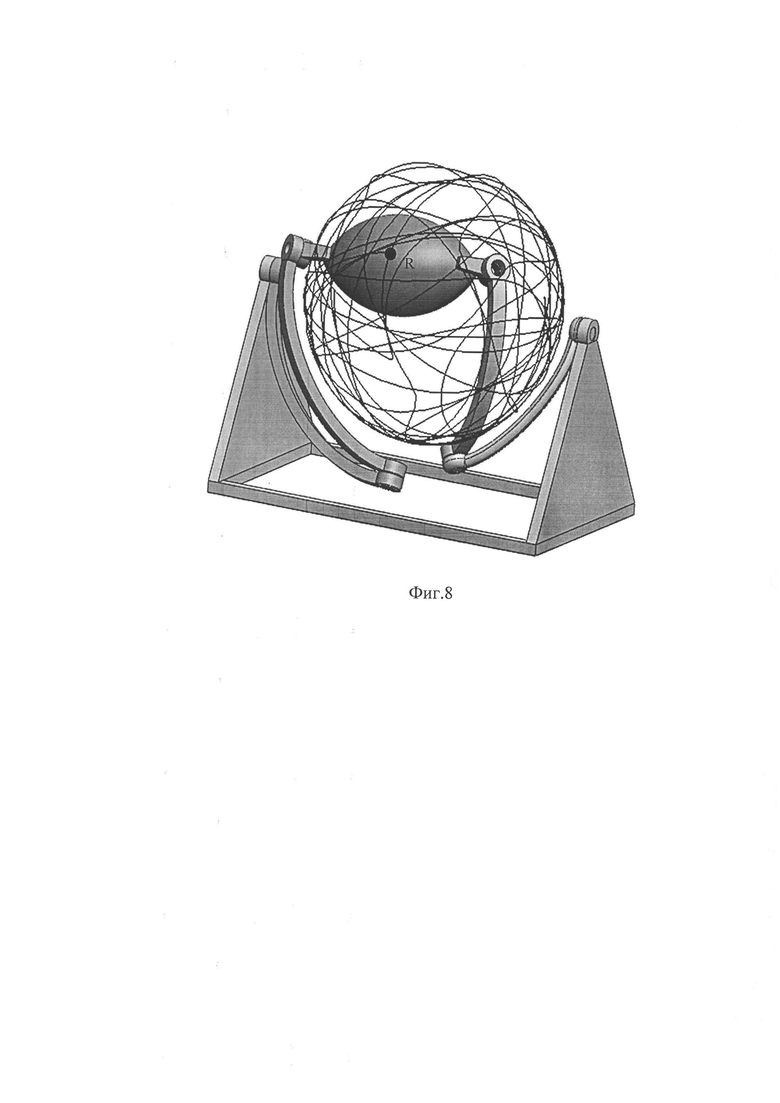
Фиг. 8 - траектория движения капсулы при работе обоих приводов;
- где: 1 - мотор-редуктор стержня; 2 - вал; 3 - ведущий стержень; 4 - шатун; 5 - капсула; 6 - балансир; 7 - ведущий кривошип; 8 - вал; 9 - мотор-редуктор кривошипа; 10 - стойка.
Тренажер (фиг. 1) состоит из стойки 10, на которую закреплен мотор-редуктор ведущего стержня 1, стойка соединяет шарниром А вал 2, который с одной стороны жестко соединен с мотор-редуктором стержня 1 и самим ведущим стержнем 3. Ведущий стержень 3 в шарнире В соединен с шатуном 4, который с помощью шарнира С соединен с капсулой 5. Капсула 5, посредством шарнира D связана с балансиром 6, который связан кривошипом 7 в шарнире F. Шарнир М жестко соединяет ведущий кривошип 7 и вал 8, а также мотор-редуктор кривошипа 9. Вся эта связь закреплена на стойке.
При вращении оси шарниров всех звеньев, выполненных в форме квадрантов круга, то есть ведущего стержня (аа' и bb'), шатуна (bb' и сс'), капсулы(сс' и dd'), балансира (dd' и ff') и ведущего кривошипа (ff' и mm') выполнены с возможностью пересечения в одной точке О.
Тренажер работает от одного привода, так и обоих одновременно, также теперь есть возможность вращения всех звеньев на одном из двух приводов, позволяющая совершать дополнительные траектории:
1) Мотор-редуктор ведущего стержня 1 через вал 2 и, передает вращательное движение ведущему стержню 3, который задает вращательное полно-оборотное движение шатуну 4, приводит в движение капсулу 5, которая с помощью балансира 6 выполняет движение качения относительно шарниров С и D, описывая траекторию движения в виде половины сферы с центром в точке R, притом, что ведущий кривошип остается неподвижным благодаря приводу мотор-редуктора ведущего кривошипа 9. (Фиг. 4)
2) Мотор-редуктор ведущего стержня 1 с валом 2, вращает ведущий стержень 3 и с помощью шарнира В перемещает шатун 4, который в шарнире С задает движение капсуле 5, которая тянет шарнир D и вращает шарнир F, балансир 6 вращает за собой ведущий кривошип 7. При таком состоянии балансир 6 регулирует направление капсулы 5 и позволяет ведущему кривошипу 7 свободно вращаться в шарнире М, а центральная точка капсулы описывает траекторию в виде спирали или формы пружины (Фиг. 5).
3) Мотор-редуктор ведущего кривошипа 9 через вал 8 передает движение на ведущий кривошип 7, который в шарнире F задает перемещение балансиру 6, приводящему в движение шатун 4 в шарнире В, и капсула 5 в шарнире С совершает движение под некоторым углом наклона к горизонту. При таком состоянии ведущий стержень 3 соединенный с мотор-редуктором ведущего стержня 1, посаженным на вал 2 остается неподвижным, при таком движении капсула описывает форму вазы (Фиг. 6).
4) Мотор-редуктор ведущего кривошипа 9 и вал 8 с жестко посаженым ведущим кривошипом 7 задает вращение балансиру 6 в шарнире F расположенным перпендикулярно к ведущему кривошипу 7, а также шатун 4 в шарнире В расположен перпендикулярно под углом квадранта ведущего стержня 3, где ведущий стержень 3 свободно вращается в шарнире А. При таком режиме работы балансир 6 позволяет капсуле 5 дополнительно выполнять смещенные траектории по спирали с вращением с центром в точке R (Фиг. 7).
5) При работе обоих мотор-редукторов сразу ведущего стержня 1 и ведущего кривошипа 9, через валы 2 и 8 зафиксированные в шарнирах А и М, задают вращения по кругу ведущему кривошипу 7 и ведущему стержню 3, которые задают возвратно-вращательное перемещение балансиру 6 и полно-оборотное перемещение шатуну 4 в шарнирах В и F, приводящие в движение капсулу 5 в шарнирах С и D, и траектория движения капсулы (с центром в точке R) будет по всей поверхности сферы (Фиг. 3, 8).
При этом, при совершении всех этих траекторий движений введено звено в виде балансир 6, которое расположено между звеньями кривошипа 7 и капсулы 5, причем капсула 5 выполнена в виде звена и соединена одним концом на наружной поверхности звеньев, балансира 6 и ведущего кривошипа 7, а другим концом на внутренней поверхности звеньев ведущего стержня 3 и шатуна 4, причем радиусы наружных и внутренних звеньев выполнены неравными между собой, при этом радиус ведущего стержня внутреннего звена выполнен больше радиуса шатуна, для вращения по своим окружностям относительно друг друга, а радиус ведущего кривошипа 7 внешнего звена выполнен больше радиуса балансира 6, для возвратно-вращательного движения относительно ведущего кривошипа, кроме того каждое ведущее звено с помощью вала соединено со своим мотор-редуктором.
По своим технико-экономическим преимуществам, по сравнению с известными аналогами, заявляемое техническое решение позволяет создать эффективный аэро-тренажер имитации полета, за счет расширения функциональных возможностей, благодаря введению звена в виде балансира, которое расположено между звеньями ведущего кривошипа и капсулы, что позволяет получать траекторию движения и вращения капсулы тренажера расширенной, по всецелой пространственной области полной сферы.
| название | год | авторы | номер документа |
|---|---|---|---|
| СФЕРИЧЕСКИЙ ТРЕНАЖЕР ВЕСТИБУЛЯРНОГО АППАРАТА | 2017 |
|
RU2640990C1 |
| БАРАБАННЫЙ СМЕСИТЕЛЬ | 2013 |
|
RU2527993C1 |
| БАРАБАННЫЙ МИКСЕР | 2013 |
|
RU2542270C1 |
| ШЕСТИЗВЕННЫЙ ШАРНИРНЫЙ МЕХАНИЗМ | 2007 |
|
RU2338104C1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ ВЕСТИБУЛЯРНОГО АППАРАТА | 2016 |
|
RU2639062C1 |
| МАНИПУЛЯТОР-ТРИПОД С ШЕСТЬЮ СТЕПЕНЯМИ ПОДВИЖНОСТИ | 2008 |
|
RU2403144C2 |
| Устройство для гальванопластической обработки деталей | 1984 |
|
SU1186706A1 |
| МЕХАНИЗМ МАШУЩЕГО КРЫЛА | 2017 |
|
RU2650293C1 |
| УСТРОЙСТВО ДЛЯ ГАЛТОВКИ ДЕТАЛЕЙ | 2022 |
|
RU2813522C2 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ ВЕСТИБУЛЯРНОГО АППАРАТА | 2015 |
|
RU2602056C2 |
Изобретение относится к области авиации и космонавтики, в частности к устройствам тренажеров имитации полета, а также может быть использовано для развлечения в роли симулятора игровых полетов. Решаемой технической задачей изобретения является создание эффективного аэротренажера за счет расширения функциональных возможностей путем вращения и полнооборотного движения капсулы тренажера в пространственной области полной сферы. Технический результат достигается тем, что в аэротренажере, состоящем из стойки 10, поддерживающей установку, капсулы 5, приводов 1 и 9, установленных на стойке 10, звеньев ведущего кривошипа 7, шатуна 4 и ведущего стержня 3, выполненных в форме квадрантов круга, вращающихся по своим окружностям и соединенных между собой шарнирами, где оси выполнены с возможностью пересечения в центре тренажера, согласно изобретению введено звено в виде балансира 6, расположенного между звеньями ведущего кривошипа 7 и капсулы 5, причем капсула 5 выполнена в виде звена и соединена одним концом на наружной поверхности звеньев балансира 6 и ведущего кривошипа 7, а другим концом на внутренней поверхности звеньев ведущего стержня 3 и шатуна 4, причем радиусы наружных и внутренних звеньев выполнены неравными между собой, при этом радиус ведущего стержня 3 внутреннего звена выполнен больше радиуса шатуна 4 для вращения по своим окружностям относительно друг друга, а радиус ведущего кривошипа 7 внешнего звена выполнен больше радиуса балансира 6 для возвратно-вращательного движения относительно ведущего кривошипа 7. Технический результат достигается тем, что в аэротренажере между валами ведущих звеньев стержня и кривошипа и их мотор-редукторов установлены самоуправляемые автоматические муфты для определенных режимов работы, управляемых компьютером. 1 з.п. ф-лы, 8 ил.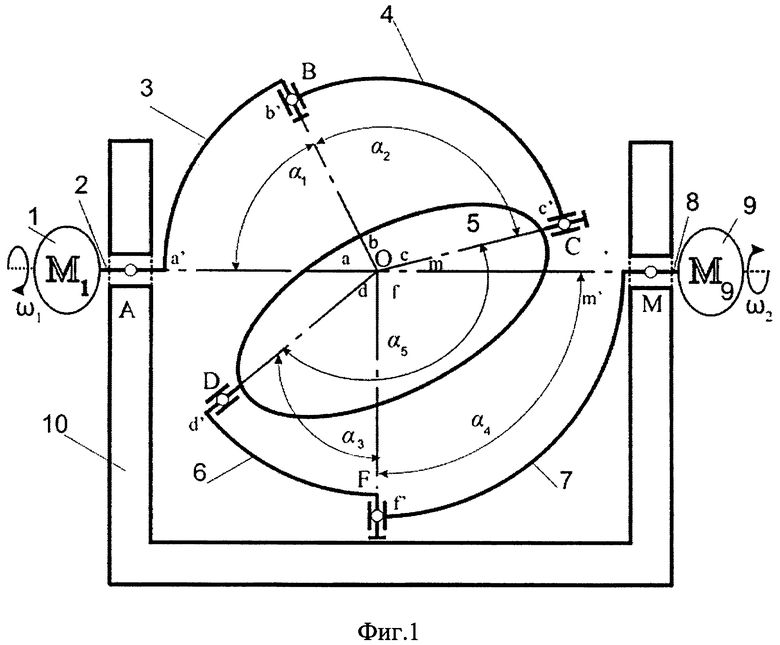
1. Аэротренажер, состоящий из стойки, поддерживающей установку, капсулы, приводов, установленных на стойке, звеньев кривошипа, шатуна и стержня, выполненных в форме квадрантов круга и соединенных между собой шарнирами, где оси выполнены с возможностью пересечения в центре тренажера, отличающийся тем, что введено звено в виде балансира, которое расположено между звеньями ведущего кривошипа и капсулы, причем капсула выполнена в виде звена и соединена одним концом на наружной поверхности звеньев балансира и ведущего кривошипа, а другим концом на внутренней поверхности звеньев ведущего стержня и шатуна, причем радиусы наружных и внутренних звеньев выполнены неравными между собой, при этом радиус ведущего стержня внутреннего звена выполнен больше радиуса шатуна для вращения по своим окружностям относительно друг друга, а радиус ведущего кривошипа внешнего звена выполнен больше радиуса балансира для возвратно-вращательного движения относительно ведущего кривошипа, кроме того, каждое ведущее звено с помощью вала соединено со своим мотор-редуктором.
2. Аэротренажер по п. 1, отличающийся тем, что между валами ведущих звеньев стержня и кривошипа и их мотор-редукторами установлены самоуправляемые автоматические муфты для определенных режимов работы, управляемых компьютером.
| СФЕРИЧЕСКИЙ ТРЕНАЖЕР ВЕСТИБУЛЯРНОГО АППАРАТА | 2017 |
|
RU2640990C1 |
| СПЛАВ НА ОСНОВЕ ТАНТАЛА | 0 |
|
SU174366A1 |
| АТТРАКЦИОН | 2007 |
|
RU2358789C1 |
| RU 177554 U1, 28.02.2018 | |||
| US 20150329223 A1, 19.11.2015. | |||

