Изобретение относится к медицине, а именно к травматологии и ортопедии, и может быть использовано для коррекции многоуровневых (двух- и трехуровневых) деформаций длинных костей.
Для коррекции деформаций длинных костей для одновременного устранения всех компонентов деформации используют т.н. "ортопедические гексаподы" [D. Paley History and Science Behind the Six-Axis Correction External Fixation Devices in Orthopedics Surgery / D. Paley // Oper. Tech. Orhop. - 2011. - Vol. 21. - P. 125-128] (фиг. 1, 2, 3, 4, 5). Принцип работы ортопедических гексаподов одинаков. Выше и ниже уровня (вершины) деформации проводят чрескостные элементы и монтируют опоры аппарата внешней фиксации. Опоры соединяют шестью телескопическими стойками специальной конструкции - т.н. "стратами". Выполняют остеотомию. После этого в компьютерную программу, прилагаемую к каждому ортопедическому гексаподу, вводят параметры, характеризующие компоновку аппарата, деформацию кости и параметры, которые должны принять костные фрагменты после коррекции. Важнейший из вводимых параметров - это исходные длины (до коррекции деформации) каждой из шести страт. Программа рассчитывает новые длины страт, которые обеспечат необходимую коррекцию деформации. После этого ортопед мануально изменяет длины страт соответственно выполненным расчетам. Это приводит к одновременной коррекции всех компонентов деформации. Однако для коррекции таким способом многоуровневых деформаций установки одного ортопедического гексапода недостаточно.
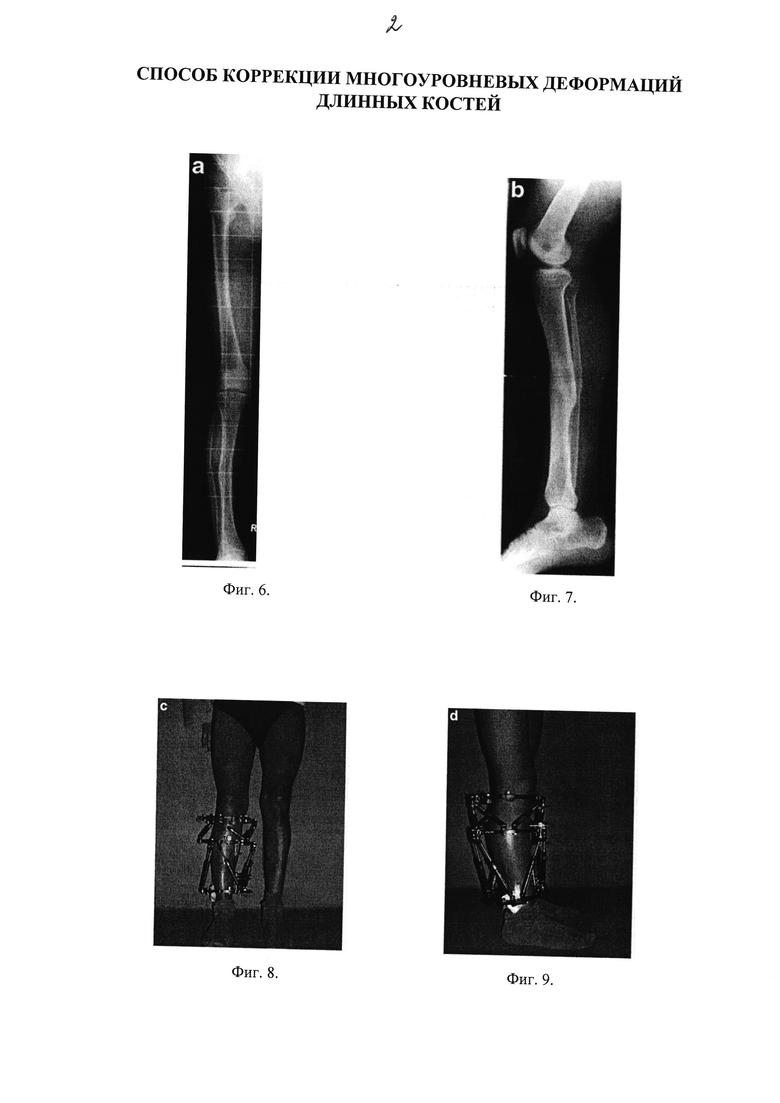
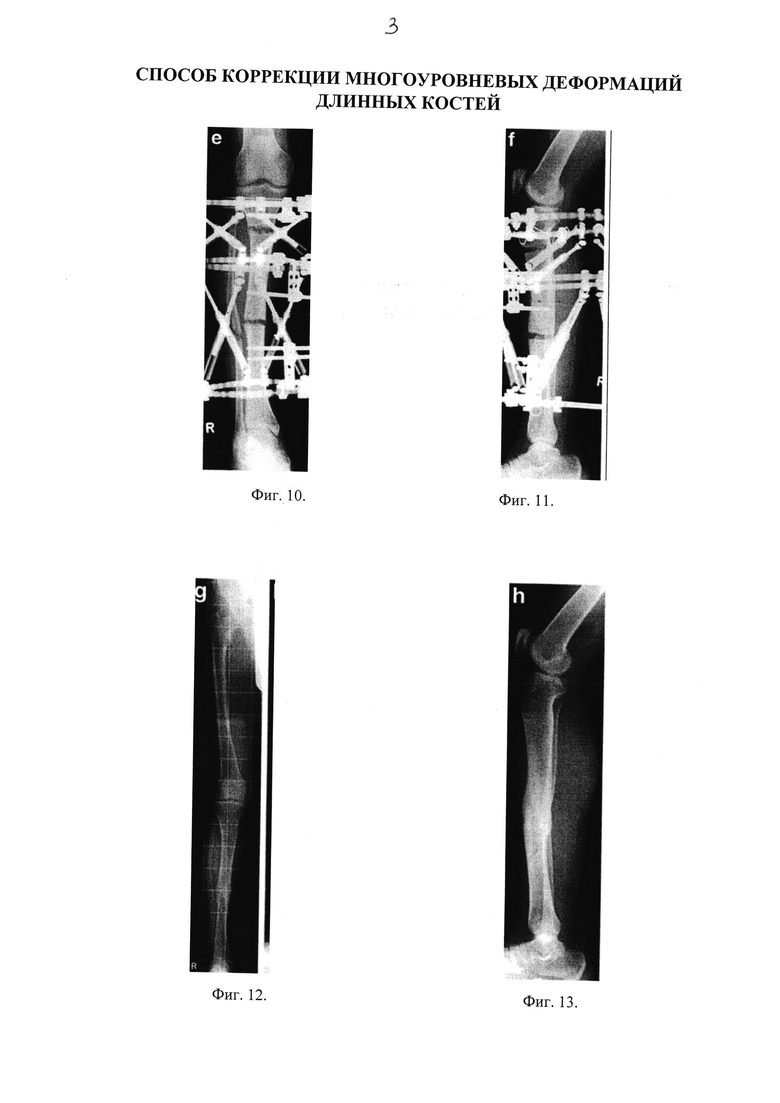
Известен способ коррекции многоуровневых деформаций длинных костей, когда имеется две и более вершин деформации (6, 7), позволяющий устранять деформации на двух уровнях одновременно, при помощи двух ортопедических гексаподов - отдельно на каждый уровень деформации (фиг. 8, 9). При этом при выполнении расчетов ось промежуточного фрагмента совмещают с осью проксимального фрагмента, а ось дистального фрагмента - с осью промежуточного фрагмента (фиг. 10, 11). В результате одновременной коррекции на двух уровнях восстанавливается ось сегмента (фиг. 12, 13, 14, 15) [R. Ganger and al., Correction of post-traumatic lower limb deformities using the Taylor spatial frame / International Orthopaedics (SICOT), 2010. - 34:723-730].
Имеются следующие недостатки данного способа использования ортопедических гексаподов для коррекции многоуровневых деформаций:
- компоновка аппарата получается очень громоздкой и тяжелой: 6 страт на уровне проксимальной деформации и 6 страт на уровне дистальной деформации, что причиняет неудобства пациенту;
- необходимо делать два отдельных расчета для каждого уровня деформации, что достаточно сложно и трудоемко, приводит к длительному нахождению пациентов в стационаре;
- использование двух гексаподов и выполнение расчетов на двух уровнях увеличивает экономические затраты на лечение;
- необходимо параллельно проводить коррекцию деформацию на двух уровнях, что достаточно трудно и болезненно для пациента.
При наличии трех вершин деформации увеличиваются сложности монтажа аппаратов и расчетов, экономические затраты, дискомфорт пациента и болезненность при коррекции.
Задача изобретения состоит в создании способа коррекции многоуровневых деформаций длинных костей с исключением вышеуказанных недостатков.
Технический результат изобретения состоит в:
- обеспечении минимизации габаритов конструкции и уменьшении ее веса за счет использования только одного гексапода,
- облегчение и упрощение работы ортопеда за счет выполнения только одного расчета в компьютерной программе вместо двух или трех при двухуровневой или трехуровневой деформации,
- облегчение процесса мануальных манипуляций по коррекции деформации для пациента и ортопеда за счет изменения в процессе коррекции длин только 6 страт вместо 12-ти - при двухуровневой деформации и 18-ти - при трехуровневой деформации,
- уменьшение экономических затрат на лечение за счет уменьшения используемой конструкции, сокращения времени коррекции и пребывания пациента в стационаре;
- повышение стабильности фиксации и дополнительной минимизации конструкции за счет модульной трансформации после коррекции деформации, что в свою очередь способствует возможности большей нагрузки на конечность и обеспечивает лучшие условия перестройки регенератов и повышает комфортность лечения для пациента.
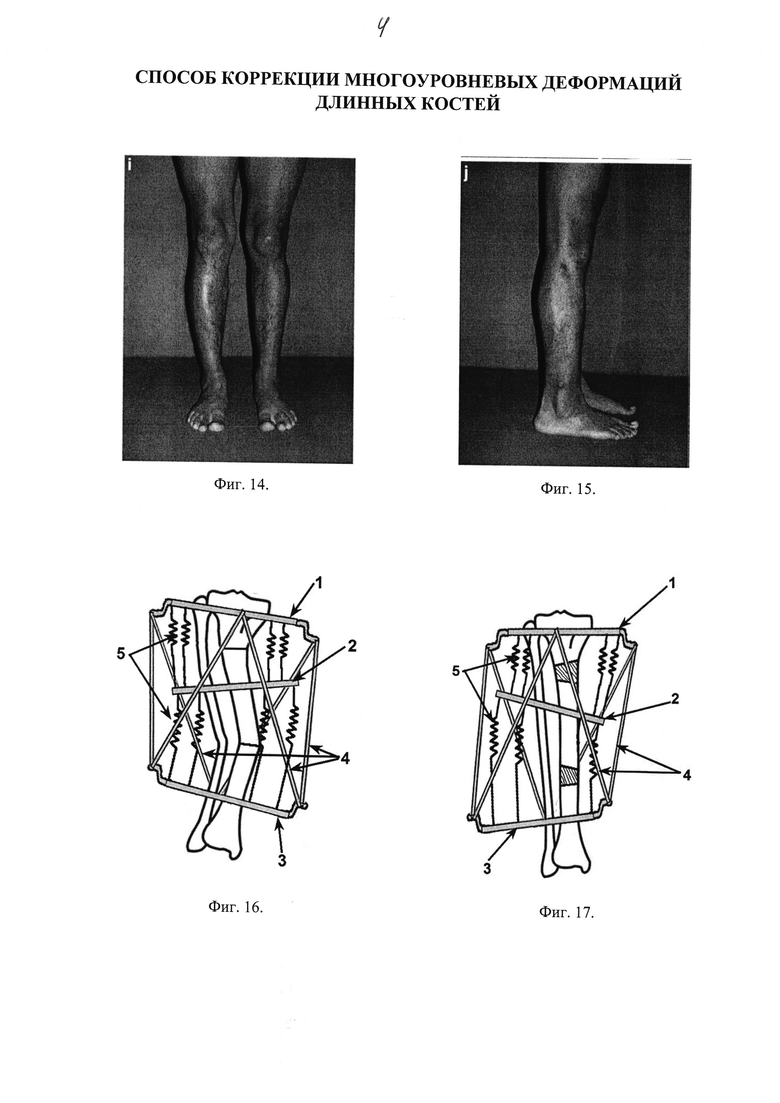
Результат изобретения достигается за счет того, что для коррекции многоуровневых деформаций используют один гексапод, страты которого фиксируют к проксимальной и дистальной опорам аппарата, минуя промежуточную (промежуточные) опоры. Промежуточную опору (промежуточные опоры) фиксируют к выше- и нижележащим опорам при помощи эластичных тяг, например пружин (фиг. 16). При планировании коррекции деформации, а затем в компьютерной программе ось дистального фрагмента совмещают с осью проксимального фрагмента, что затем происходит при реальной коррекции в процессе мануальных действий в аппарате. При этом промежуточный фрагмент (фрагменты), фиксированные в опорах, соединенных со смежными при помощи эластичных тяг, приобретают правильное положение "автоматически" (фиг. 17). После завершения коррекции выполняют "модульную трансформацию" аппарата внешней фиксации. Для этого заменяют эластичные тяги и страты гексапода на фиксированные шарнирные соединения, реже на прямые резьбовые стержни (если после коррекции все опоры оказываются параллельными). Если при этом имеется незначительное смещение промежуточного фрагмента по ширине, его устраняют одномоментно под рентгенологическим контролем.
На фигурах изображены:
Фиг. 1. Ортопедический гексапод - аппарат Taylor Spatial Frame.
Фиг. 2. Ортопедический гексапод - аппарат Ilizarov Hexapod System.
Фиг. 3. Ортопедический гексапод - аппарат Орто-СУВ.
Фиг. 4. Ортопедический гексапод - аппарат TL-HEX.
Фиг. 5. Ортопедический гексапод - аппарат Smart Correction.
Фиг. 6. Панорамная рентгенограмма нижней конечности в прямой проекции до коррекции двухуровневой деформации.
Фиг. 7. Рентгенограмма нижней конечности в боковой проекции до коррекции двухуровневой деформации.
Фиг. 8. Фото нижних конечностей пациента на этапе коррекции с применением двух ортопедических гексаподов (вид спереди).
Фиг. 9. Фото нижних конечностей пациента на этапе коррекции с применением двух ортопедических гексаподов (вид сбоку).
Фиг. 10. Рентгенограмма голени в прямой проекции после выполнения двух остеотомий большеберцовой кости на вершинах деформаций в процессе коррекции с применением двух ортопедических гексаподов.
Фиг. 11. Рентгенограмма голени в боковой проекции после выполнения двух остеотомий большеберцовой кости на вершинах деформаций в процессе коррекции с применением двух ортопедических гексаподов.
Фиг. 12. Панорамная рентгенограмма нижней конечности в прямой проекции после коррекции деформаций и демонтажа аппаратов внешней фиксации.
Фиг. 13. Рентгенограмма нижней конечности в боковой проекции после коррекции деформаций и демонтажа аппаратов внешней фиксации.
Фиг. 14. Фото нижних конечностей пациента после демонтажа аппаратов внешней фиксации - вид спереди (результат лечения).
Фиг. 15. Фото нижних конечностей пациента после демонтажа аппаратов внешней фиксации - вид сбоку (результат лечения).
Фиг. 16. Схема наложения одного гексапода для коррекции двухуровневой деформации длинных костей предлагаемым способом, где: 1 - проксимальная опора, 2 - промежуточная опора, 3 - дистальная опора, 4 - страты гексапода, 5 - эластичные (пружинные) тяги.
Фиг. 17. Схема положения опор и страт гексапода после коррекции двухуровневой деформации длинных костей предлагаемым способом, где: 1 - проксимальная опора, 2 - промежуточная опора, 3 - дистальная опора, 4 - страты гексапода, 5 - эластичные (пружинные) тяги.
Фиг. 18. Фото пациента перед операцией - вид спереди.
Фиг. 19. Фото пациента перед операцией - вид сбоку.
Фиг. 20. Фото пациента перед операцией - вид сзади.
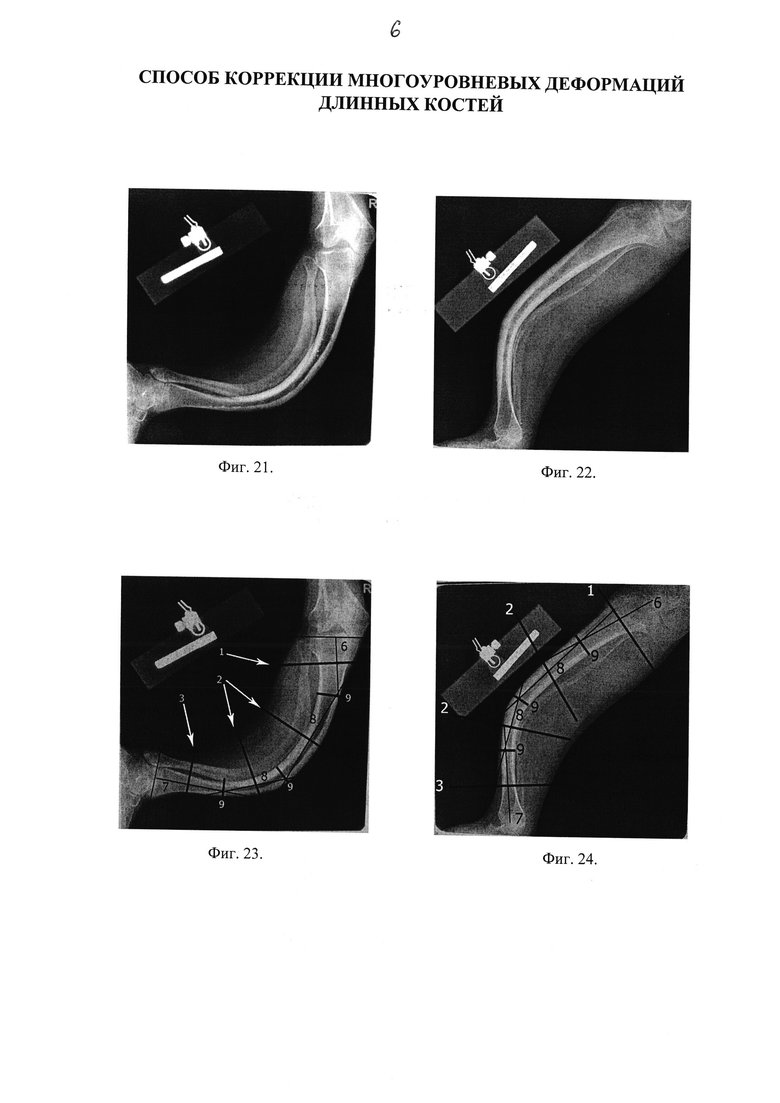
Фиг. 21. Рентгенограмма правой голени в прямой проекции до операции.
Фиг. 22. Рентгенограмма правой голени в боковой проекции до операции.
Фиг. 23. Выполнение предоперационного планирования по рентгенограмме (прямая проекция), где 1 - планируемый уровень проксимальной опоры, 2 - планируемые уровни промежуточных опор, 3 - планируемый уровень дистальной опоры, 6 - ось проксимального фрагмента, 7 - ось дистального фрагмента, 8 - оси промежуточных фрагментов, 9 - уровни планируемых остеотомий.
Фиг. 24. Выполнение предоперационного планирования по рентгенограмме (боковая проекция), где 1 - планируемый уровень проксимальной опоры, 2 - планируемые уровни промежуточных опор, 3 - планируемый уровень дистальной опоры, 6 - ось проксимального фрагмента, 7 - ось дистального фрагмента, 8 - оси промежуточных фрагментов, 9 - уровни планируемых остеотомий.
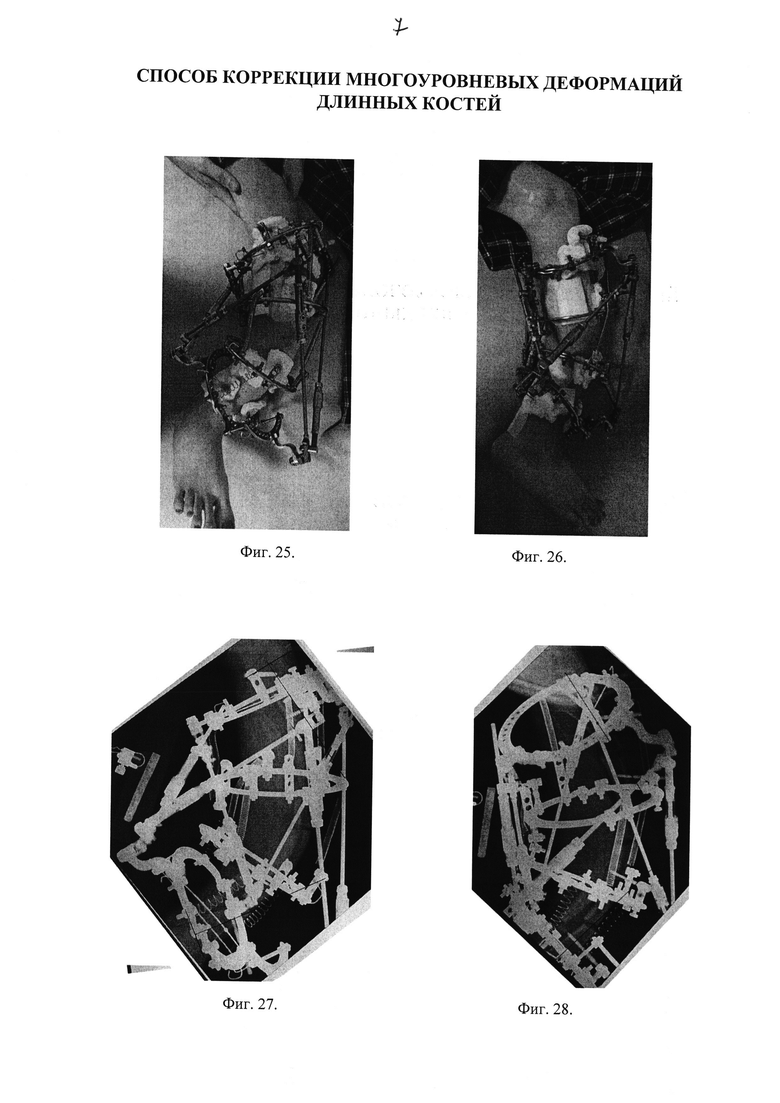
Фиг. 25. Фото правой голени пациента (вид спереди) после операции с применение одного гексапода по предложенному способу перед коррекцией трехуровневой деформации голени.
Фиг. 26. Фото правой голени пациента (вид сзади) после операции с применение одного гексапода по предложенному способу перед коррекцией трехуровневой деформации голени.
Фиг. 27. Рентгенограмма правой голени в прямой проекции после операции перед коррекцией трехуровневой деформации голени.
Фиг. 28. Рентгенограмма правой голени в боковой проекции после операции перед коррекцией трехуровневой деформации голени.
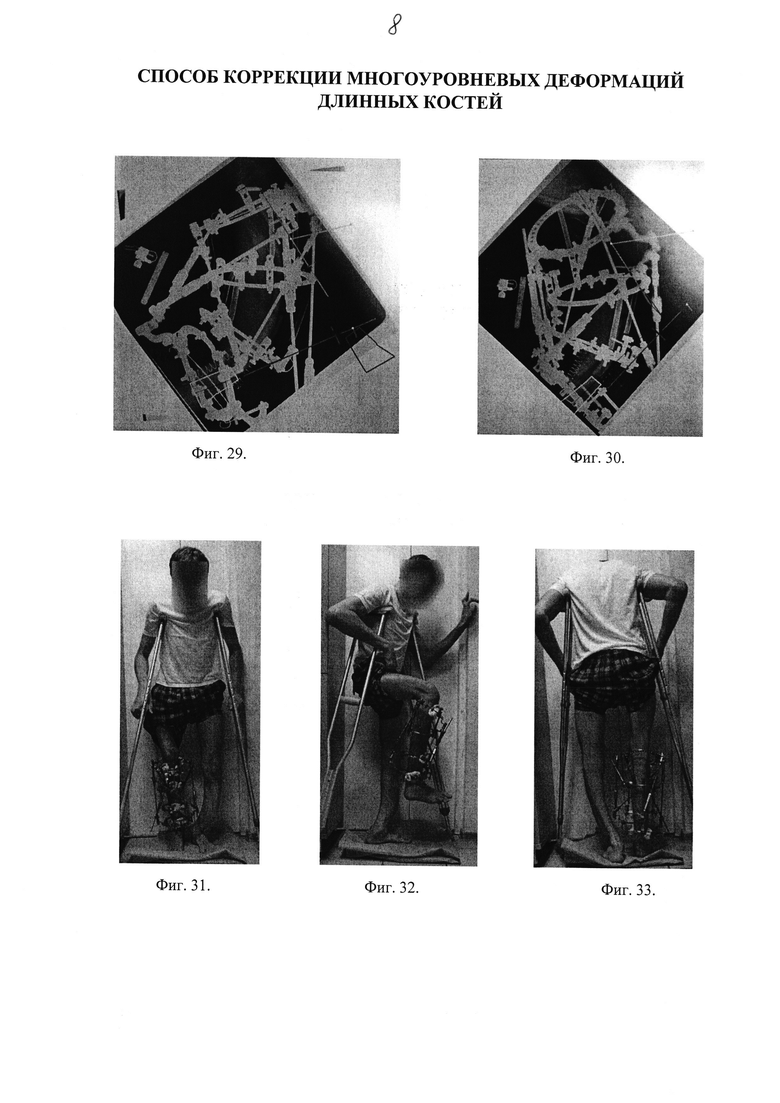
Фиг. 29. Рентгенограмма правой голени в прямой проекции и расчет коррекции деформаций в компьютерной программе.
Фиг. 30. Рентгенограмма правой голени в боковой проекции и расчет коррекции деформаций в компьютерной программе.
Фиг. 31. Фото пациента (вид спереди) после коррекции многоуровневых деформаций с использованием одного гексапода по предложенному способу.
Фиг. 32. Фото пациента (вид сбоку) после коррекции многоуровневых деформаций с использованием одного гексапода по предложенному способу.
Фиг. 33. Фото пациента (вид сзади) после коррекции многоуровневых деформаций с использованием одного гексапода по предложенному способу.
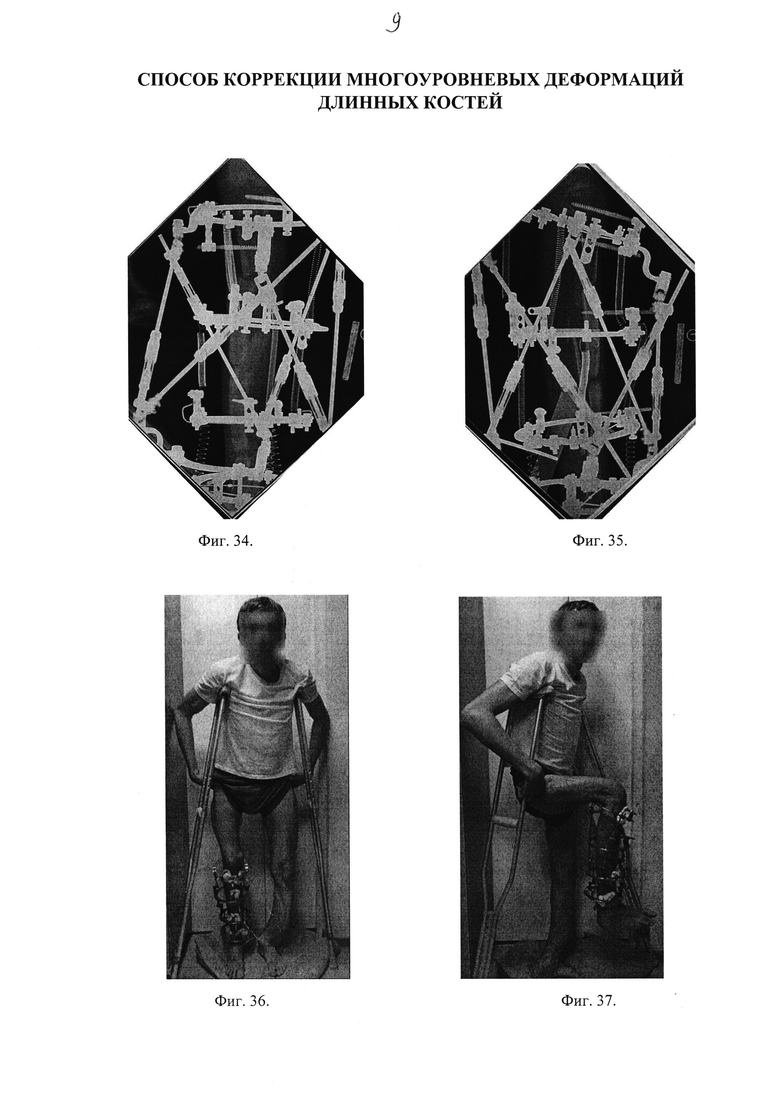
Фиг. 34. Рентгенограмма правой голени пациента в прямой проекции после коррекции многоуровневых деформаций с использованием одного гексапода по предложенному способу.
Фиг. 35. Рентгенограмма правой голени пациента в боковой проекции после коррекции многоуровневых деформаций с использованием одного гексапода по предложенному способу.
Фиг. 36. Фото пациента после модульной трансформации аппарата (вид спереди).
Фиг. 37. Фото пациента после модульной трансформации аппарата (вид сбоку).
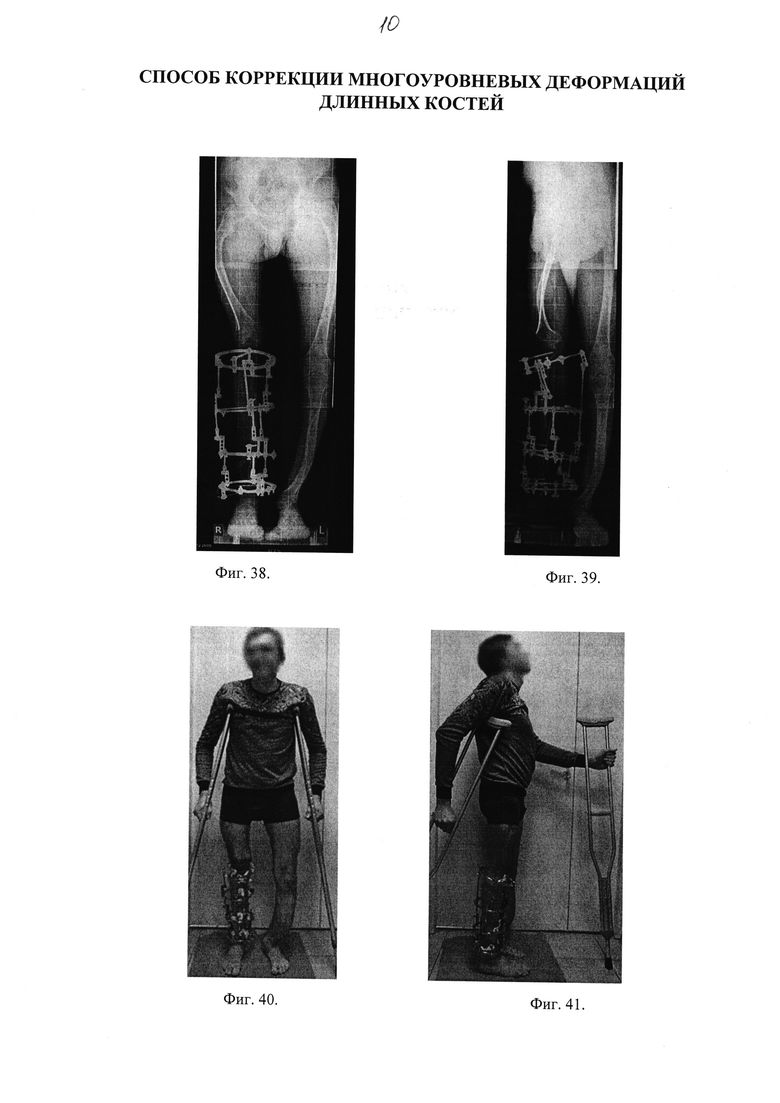
Фиг. 38. Панорамная рентгенограмма нижних конечностей в прямой проекции через 5 месяцев фиксации.
Фиг. 39. Рентгенограмма правой нижней конечности в боковой проекции через 5 месяцев фиксации.
Фиг. 40. Фото пациента через 6 месяцев фиксации - вид спереди.
Фиг. 41. Фото пациента через 6 месяцев фиксации - вид сбоку.
Способ коррекции многоуровневых деформаций длинных костей осуществляют следующим образом.
При предоперационном планировании по данным рентгенограмм и КТ (при наличии торсионной деформации) определяют оси проксимального, дистального и промежуточного (промежуточных) фрагментов, вершины деформаций, планируют уровни остеотомий и положения опор аппарата внешней фиксации (фиг. 23, 24). Интраоперационно проводят чрескостные элементы и монтируют одну-две опоры аппарата внешней фиксации на проксимальный фрагмент, одну-две опоры на промежуточный фрагмент (фрагменты) и одну-две опоры на дистальный фрагмент (в зависимости от длины фрагментов). Страты гексапода фиксируют к проксимальной и дистальной опорам, минуя промежуточную (промежуточные). Промежуточную (промежуточные) опоры фиксируют к смежным опорам при помощи эластичных (как вариант пружинных) тяг. Выполняют остеотомии на каждом уровне деформации (фиг. 25, 26, 27, 28). Производят измерения параметров гексапода, которые вносят в компьютерную программу, также в программу вносят параметры необходимого положения фрагментов на основе предоперационного планирования. После этого, используя компьютерную программу ортопедического гексапода, производят расчет коррекции деформации. При этом ось дистального фрагмента совмещают с осью проксимального фрагмента, "игнорируя" промежуточный (промежуточные) фрагменты (фиг. 29, 30). В соответствии с расчетами программы мануально изменяют длину каждой из шести страт, что приводит к коррекции деформации (фиг. 31, 32, 33). При этом промежуточный фрагмент (фрагменты), фиксированные в опорах, соединенных со смежными при помощи эластичых тяг, принимают правильное положение "автоматически" (фиг. 34, 35). После завершения коррекции выполняют "модульную трансформацию" аппарата внешней фиксации. Для этого заменяют эластичные тяги и страты гексапода на фиксированные шарнирные соединения (фиг. 36, 37), реже на прямые резьбовые стержни (если после коррекции все опоры оказываются параллельными). Если при этом имеется незначительное смещение промежуточного фрагмента по ширине, его устраняют одномоментно под рентгенологическим контролем.
Применение предложенного способа делает лечение более комфортным для пациента, сокращает работу ортопеда и время коррекции деформации и, соответственно, уменьшает экономические затраты за счет уменьшения используемой конструкции и сокращения времени пребывания пациента в стационаре.
Клинический пример.
Пациент Я., 21 год. Диагноз: Несовершенный остеогенез. Сложная многокомпонентная, многоплоскостная деформация нижних конечностей. Считает себя больным с возраста 5 лет, когда впервые отмечено появление деформаций нижних конечностей. В возрасте 12 лет произошел перелом правого бедра, который сросся с деформацией. В дальнейшем отмечал нарастание деформаций обеих голеней (фиг. 18, 19, 20, 21, 22). После выполнения предоперационного планирования с определением осей фрагментов и вершин деформаций, уровней остеотомий и положения опор аппарата внешней фиксации (фиг. 23, 24) 22.04.2015 года выполнена операция - удлинение правого ахиллова сухожилия, комбинированный чрескостный остеосинтез правой голени, две остеотомии малоберцовой кости, три остеотомии (на уровне каждой из вершин деформации) правой большеберцовой кости (фиг. 27, 28). Интраоперационно была наложена одна опора на проксимальный фрагмент, две опоры на промежуточные фрагменты и одна опора на дистальный фрагмент; установлены 6 страт гексапода; при этом страты фиксировали только к проксимальной и дистальной опорам, минуя промежуточные. Промежуточные опоры фиксировали к смежным опорам и между собой при помощи пружинных тяг (фиг. 25, 26). При расчете в компьютерной программе ортопедического гексапода, ось дистального фрагмента была совмещена с осью проксимального фрагмента, "игнорируя" промежуточные фрагменты (фиг. 29, 30). Была выполнена одновременная коррекция деформаций во всех плоскостях на всех уровнях (фиг. 31, 32, 33, 34, 35), период коррекции составил 52 дня. 29.06.2015 г. была выполнена «модульная трансформация» аппарата внешней фиксации: все кольца соединены фиксированными шарнирами, страты и эластичные тяги демонтированы (фиг. 36, 37). Пациент был выписан из клиники на период фиксации. При осмотре через 6 месяцев (фиг. 40, 41) определяются признаки консолидации на уровне всех остеотомий (фиг. 38, 39).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОРРЕКЦИИ МНОГОВЕРШИННЫХ ДЕФОРМАЦИЙ ДЛИННЫХ КОСТЕЙ | 2024 |
|
RU2839808C1 |
| СПОСОБ УДЛИНЕНИЯ БЕДРЕННОЙ КОСТИ ПОВЕРХ ИНТРАМЕДУЛЛЯРНОГО СТЕРЖНЯ | 2016 |
|
RU2638279C1 |
| СПОСОБ ПРЕДОПЕРАЦИОННОГО ПЛАНИРОВАНИЯ КОРРИГИРУЮЩИХ ОСТЕОТОМИЙ КОСТЕЙ ГОЛЕНИ ДЛЯ ИСПРАВЛЕНИЯ О-ОБРАЗНОЙ ФОРМЫ НОГ | 2013 |
|
RU2547252C1 |
| СПОСОБ МОДЕЛИРОВАНИЯ ПОСЛЕДОВАТЕЛЬНОГО ПРИМЕНЕНИЯ ЧРЕСКОСТНОГО И ИНТРАМЕДУЛЛЯРНОГО БЛОКИРУЕМОГО ОСТЕОСИНТЕЗА | 2015 |
|
RU2593583C1 |
| Способ планирования и выполнения коррекции деформаций длинных костей | 2016 |
|
RU2641840C2 |
| СПОСОБ ОСТЕОСИНТЕЗА АППАРАТОМ ОРТО-СУВ ПРИ ДЕФОРМАЦИЯХ СРЕДНЕГО ОТДЕЛА СТОПЫ | 2011 |
|
RU2489106C2 |
| СПОСОБ РЕПОЗИЦИИ ФРАГМЕНТОВ ПЯТОЧНОЙ КОСТИ ПРИ ВЫПОЛНЕНИИ ЕЕ КОСОЙ ОСТЕОТОМИИ | 2017 |
|
RU2661705C1 |
| Способ лечения врожденных пороков бедренной кости, сопровождающихся укорочением, недоразвитием наружного мыщелка у растущих детей | 2018 |
|
RU2703191C1 |
| СПОСОБ ОСТЕОСИНТЕЗА АППАРАТОМ ОРТО-СУВ ДЛЯ УСТРАНЕНИЯ ВЫВИХОВ В ГОЛЕНОСТОПНОМ СУСТАВЕ | 2013 |
|
RU2547798C1 |
| СПОСОБ ОСТЕОСИНТЕЗА АППАРАТОМ ОРТО-СУВ ПРИ ДЕФОРМАЦИЯХ ЗАДНЕГО ОТДЕЛА СТОПЫ | 2015 |
|
RU2578841C1 |


Изобретение относится к травматологии и ортопедии и может быть применимо для коррекции многоуровневых деформаций длинных костей. Проводят чрескостные элементы и монтируют проксимальную, дистальную и промежуточную опоры аппарата внешней фиксации. Выполняют остеотомии на уровне каждой из вершин деформации. Монтируют ортопедический гексапод. Страты гексапода фиксируют только к проксимальной и дистальной опорам, а промежуточные опоры соединяют с выше- и нижележащими при помощи эластичных тяг. Вводят параметры гексапода и данные предоперационного планирования в компьютерную программу и, используя компьютерную программу, производят расчет коррекции деформации, совмещая ось дистального фрагмента с осью проксимального фрагмента. Затем мануально изменяют длины страт гексапода на основе выполненных расчетов, производя таким образом одновременную коррекцию деформаций на всех уровнях. Заменяют эластичные тяги и страты гексапода на фиксированные шарнирные соединения или на прямые резьбовые стержни. Способ позволяет увеличить стабильность фиксации, обеспечить условия для перестройки регенератов. 41 ил.
Способ коррекции многоуровневых деформаций длинных костей, включающий проведение чрескостных элементов и монтаж проксимальной, дистальной и промежуточных опор аппарата внешней фиксации, выполение остеотомий на уровне каждой из вершин деформации, монтаж ортопедического гексапода, отличающийся тем, что страты гексапода фиксируют только к проксимальной и дистальной опорам, а промежуточные опоры соединяют с выше- и нижележащими при помощи эластичных тяг, далее вводят параметры гексапода и данные предоперационного планирования в компьютерную программу и, используя компьютерную программу, производят расчет коррекции деформации, совмещая ось дистального фрагмента с осью проксимального фрагмента, затем мануально изменяют длины страт гексапода на основе выполненных расчетов, производя таким образом одновременную коррекцию деформаций на всех уровнях, после чего заменяют эластичные тяги и страты гексапода на фиксированные шарнирные соединения или на прямые резьбовые стержни.
| ВИЛЕНСКИЙ В.А | |||
| и др | |||
| Ортопедические гексаподы: история, настоящее, перспективы | |||
| Ортопедия, травматология и восстановительная хирургия детского возраста | |||
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |
| Маркировочная краска для холодного клеймения | 1955 |
|
SU105821A1 |
| СПОСОБ ЛЕЧЕНИЯ ЗАБОЛЕВАНИЙ ПИЩЕВОДА | 1999 |
|
RU2152177C1 |
| ROQERS M.J | |||
| et al | |||
| Computer hexapod assisted orthopaedic surgery (CHAOS) in the correction of long bone fracture and deformity | |||
| J Orthop Trauma | |||
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |

