Область техники, к которой относится изобретение
Изобретение относится к сооружениям специального назначения, предназначенным для размещения и хранения транспортных средств, преимущественно многоярусным автостоянкам, парковкам, гаражам.
Уровень техники
Известен многоэтажный гараж-склад (патент RU 2111325, МПК: Е04Н 6/18, опубл. 20.05.98), содержащий ячейки для хранения автомобилей, установленный между ними подъемник с поворотной платформой, на которой смонтированы две пары неподвижных гребенок и два манипулятора в виде кареток с подъемными гребенками, взаимодействующими с колесами автомобиля при его подъеме, опускании и переносе. Манипуляторы забирают автомобили с неподвижных гребенок в зоне въезда-выезда и осуществляют их перемещение и установку на неподвижные гребенки подъемника.
Известна автостоянка, содержащая приемную площадку с опорными устройствами для передних колес автомобиля, стеллажи с ячейками и перемещаемую относительно них по вертикали и горизонтали транспортную платформу с загрузочными механизмами в виде выдвигаемых стрел с захватами (см. патент RU 83271 U1, МПК: Е04Н 6/00, опубл. 27.05.2009). При въезде на приемную площадку передние колеса автомобиля в результате управляемого качения попадают в углубления опорного устройства и фиксируются. Водитель покидает автомобиль. С транспортной платформы выдвигаются стрелы с расположенными на концах стрел захватами, которые вводятся в зацепление с трапециевидными выступами, выполненными по краям опорного устройства. Электромагниты, которыми оснащены захваты, гарантируют их надежное сцепление с опорным устройством. Синхронным подъемом стрел приподнимают опорное устройство вместе с зафиксированными в нем передними колесами автомобиля, и возвращают стрелы в исходное положение, выполняя перемещение автомобиля на транспортную платформу.
Существенным недостатком обоих вышеупомянутых аналогов является то, что манипуляторы, обеспечивающие перемещение автомобиля между приемной площадкой и подъемным устройством, размещены непосредственно на грузонесущей платформе подъемника, что существенно увеличивает ее вес. В результате, подъемник постоянно перемещает дополнительный груз, что ведет к завышенным энергозатратам на его эксплуатацию, и следовательно - к удорожанию стоянки.
Кроме того, при въезде на приемную площадку от водителя требуется повышенное внимание для точности въезда автомобиля по направляющим и его размещения в строго заданном положении, необходимом для последующей работы манипулятора.
Известны решения многоярусных стоянок, в которых не требуется особой точности и внимания от водителя при въезде на приемную площадку. Все неточности ориентации автомобиля относительно перемещающих механизмов исправляются автоматической системой парковки, без участия водителя.
Так, например, в известной автоматизированной парковке, заявка WO 2013037410, МПК: Е04Н 6/18, Е04Н 6/30, опубл. 21.03.2013, приемный бокс оснащен вмонтированными в основание бокса управляемыми площадками для опоры передних и задних колес автомобиля, а также системой датчиков, отслеживающих положение автомобиля. По сигналам датчиков система управления изменяет положение площадок, по сути, представляющих собой транспортеры, обеспечивая выравнивание положения автомобиля.
Однако подобное решение имеет один существенный недостаток, а именно низкую надежность работы системы в условиях высокой загрязненности автомобилей в осенне-зимний период, что обусловлено размещением приводных механизмов в основании бокса. В этом случае для обеспечения чистоты приемной площадки дополнительно потребуется, например, организация мойки принимаемых автомобилей, либо дополнительная герметизация приводных механизмов. И то, и другое ведет к существенному усложнению и удорожанию парковки.
В качестве наиболее близкого аналога для заявляемого технического решения принят автоматический многоэтажный гараж, содержащий размещенные ярусами ячейки для хранения автомобилей, по меньшей мере, одну приемную площадку для въезда и выезда автомобилей, подъемник и манипулятор для загрузки автомобиля с приемной площадки на платформу подъемника и обратной выгрузки (см. патент RU 2324040, МПК: Е04Н 6/22, опубл. 10.05.2008).
Для точной ориентации автомобиля относительно манипулятора приемная площадка оснащена направляющими, сдвигаемыми или раздвигаемыми под тип подъехавшего автомобиля и автоматически выставляемым по типу автомобиля упором-ограничителем, оснащенным датчиком, по сигналу которого включаются упоры для задних колес. После установки и фиксации автомобиля исполнительный орган манипулятора, установленного на платформе подъемника, выполняет перемещение автомобиля, за шаровой упор подвески переднего колеса.
В качестве недостатков ближайшего аналога можно отметить следующие:
- повышенные затраты на перемещение платформы подъемника, несущей манипулятор,
- требования наличия навыков и внимания у водителя для правильной установки автомобиля на приемной площадке;
- низкая надежность работы механизмов в осенне-зимний период, что обусловлено размещением подвижных механизмов в полу приемной площадки, где они подвержены попаданию грязи и воды, стекающей с машин.
Заявляемое изобретение направлено на решение вышеупомянутых проблем, а именно, на снижение требований к точности установки автомобиля на приемной площадке и повышение надежности работы стоянки в условиях высокой загрязненности принимаемых автомобилей.
Раскрытие изобретения
Упомянутые выше задачи решены благодаря тому, что в автоматизированной стоянке для автомобилей, содержащей размещенные ярусами ячейки для хранения автомобилей, по меньшей мере, одну приемную площадку для въезда и выезда автомобилей, подъемник и манипулятор для перемещения автомобилей с приемной площадки на платформу подъемника и обратно, согласно заявляемому изобретению, манипулятор выполнен с возможностью перемещения над приемной площадкой и платформой подъемника, установленной в нижнем положении, и с возможностью фиксированных остановок над каждой из них, и оснащен подвижными захватами и датчиками для определения положения автомобиля и определения положения захватов относительно автомобиля, связанными с системой управления приводными механизмами манипулятора и захватов.
Одним существенным отличием предлагаемой конструкции от ближайшего аналога является то, что манипулятор размещен вне платформы подъемника и установлен с возможностью перемещения над приемной площадкой и платформой подъемника, установленной в нижнем положении.
При таком конструктивном исполнении все подвижные механизмы манипулятора размещены сверху, над автомобилями, они не подвержены загрязнению стекающей с автомобилей воды или грязи, что гарантирует надежность их работы в любых условиях.
Благодаря независимому размещению манипулятора, платформа подъемника ничем не отягощена, кроме собственного веса и веса автомобиля, что минимизирует затраты на ее перемещение.
Другим существенным отличием предлагаемого решения является то, что манипулятор оснащен подвижными управляемыми захватами и информационно-сенсорной системой - системой датчиков, отслеживающих положение манипулятора и его захватов относительно автомобиля, на основании сигналов которых система управления формирует сигналы для приводных механизмов манипулятора и захватов.
В предлагаемом техническом решении термин «манипулятор» использован в своем наиболее широком значении, а именно: манипуляционный робот (промышленный робот), т.е. автоматическое устройство, звенья которого выполняют перемещения по командам системы управления, соединенной с приводными механизмами звеньев манипулятора и его захватами прямой и обратной связью.
Конструктивное исполнение манипулятора позволяет выполнить автоматическую загрузку и выгрузку автомобилей любого типа, ориентированных любым произвольным образом в пределах разметки приемной площадки. Оснащенный системой датчиков робот-манипулятор определяет положение автомобиля, к которому подстраивается, осуществляет захват автомобиля, его подъем, перемещение и ориентацию автомобиля относительно платформы подъемника.
Наличие такого манипулятора позволяет исключить какие-либо требования к точности размещения автомобиля на приемной площадке, что облегчает действия водителя, позволяет сократить затрачиваемое им время на установку автомобиля. При этом предельно упрощается конструкция приемных площадок.
Еще одним положительным моментом предлагаемого технического решения является то, что оно снимает требование к размещению приемных площадок и платформы подъемника на одном уровне, что позволяет использовать ножничный подъемник без устройства специальных фундаментов для его заглубления или аппарелей для выравнивания уровней.
Современный уровень развития техники, в частности производства промышленных роботов, обеспечивает широкие возможности для реализации предлагаемого технического решения. Используя различные комбинации приводных механизмов и датчиков, можно получить различные модификации робота-манипулятора, выполняющего заданные функции.
В конкретном примере реализации изобретения манипулятор включает тележку, установленную с возможностью перемещения вдоль подвесных направляющих, размещенных между приемными площадками и шахтой подъемника, связанную с тележкой посредством поворотного механизма раму с каретками, установленными с возможностью перемещения в продольных направляющих рамы, и телескопические стойки, основания которых смонтированы на каретках с возможностью поперечного, относительно движения кареток, перемещения. На свободных концах телескопических стоек размещены захваты, выполненные, каждый, в виде пары поворотных опор для колеса автомобиля.
Датчики для определения положения автомобиля могут быть размещены по периметру рамы манипулятора. Датчики для определения положения захватов относительно автомобиля могут быть установлены на телескопических стойках.
Суть заявляемого технического решения поясняется приведенным ниже примером и чертежами, на которых схематично изображены:
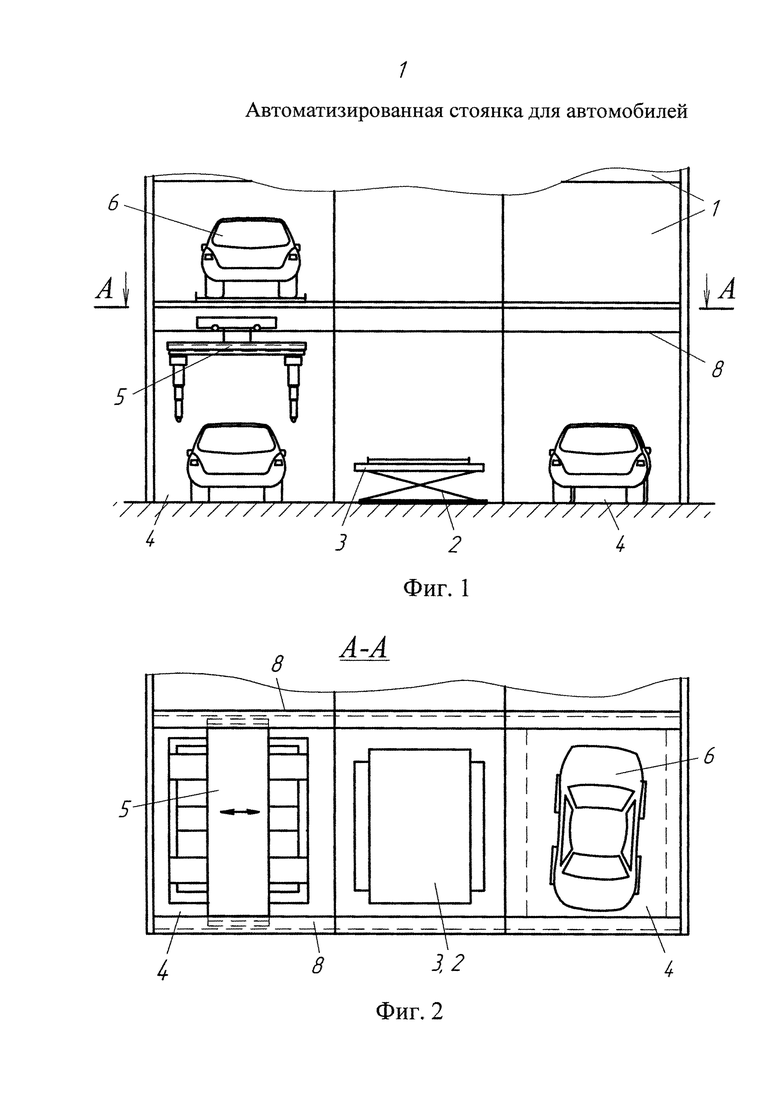
на фиг. 1 - автостоянка, вертикальный разрез;
на фиг. 2 – то же, сечение А-А с фиг. 1, вид нижнего этажа в плане;
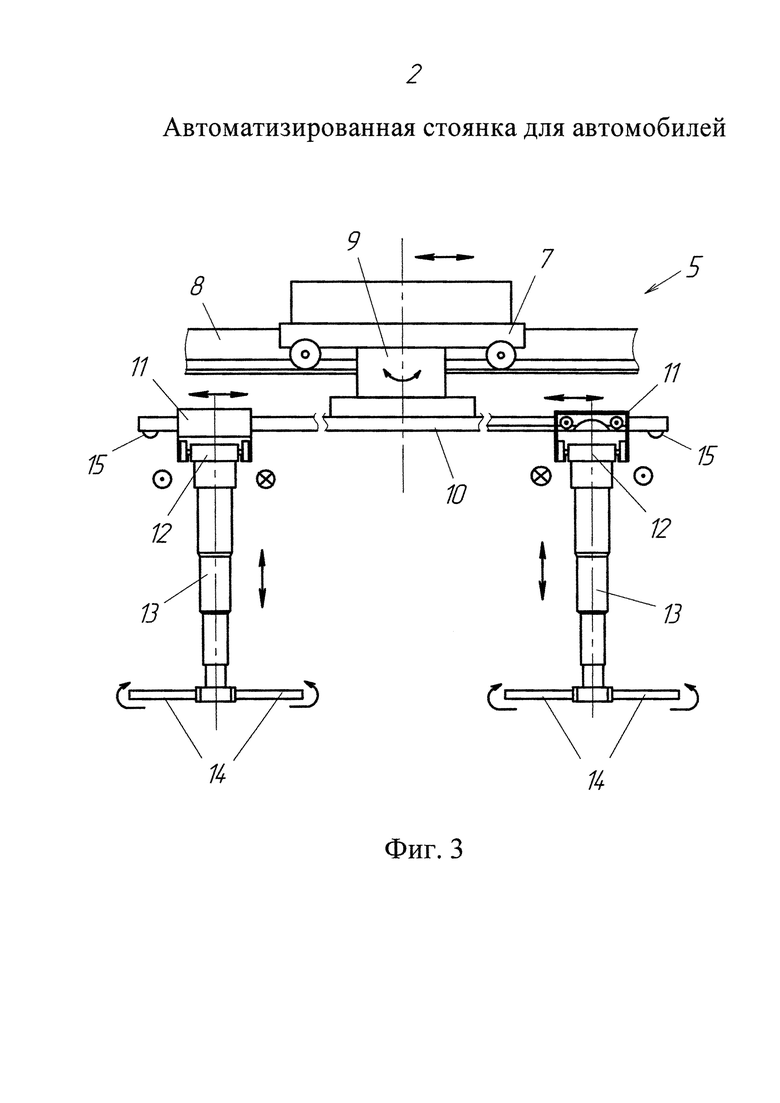
на фиг. 3 - манипулятор, схематично;
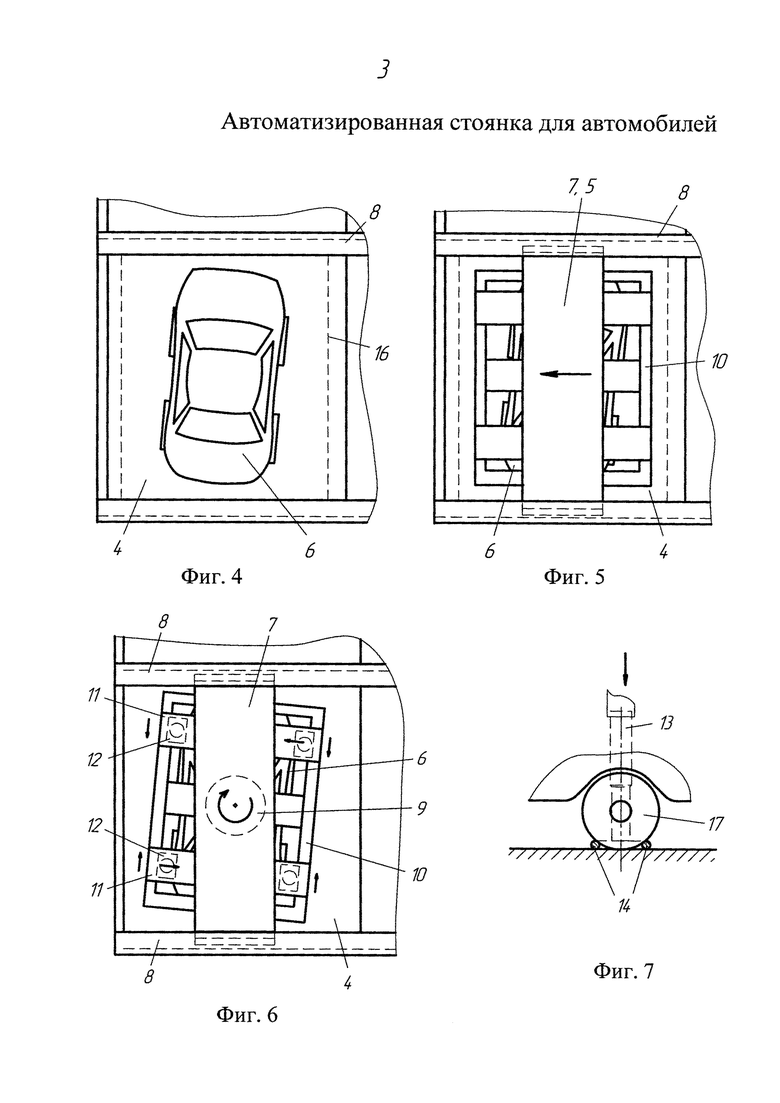
на фиг. 4-9 - поэтапно иллюстрирован процесс работы манипулятора при перемещении автомобиля с приемной площадки на платформу подъемника.
Осуществление изобретения
Автоматизированная стоянка для автомобилей содержит (см. фиг. 1, 2) размещенные ярусами ячейки 1 для хранения автомобилей, подъемник 2 с грузовой платформой 3, приемные площадки 4 для въезда и выезда автомобилей, размещенные по сторонам относительно подъемника 2, и манипулятор 5 для перемещения автомобиля 6 с приемной площадки 4 на платформу 3 подъемника 2 и обратно.
Основание манипулятора 5 (см. фиг. 3) выполнено в виде тележки 7, оборудованной двигателем и установленной с возможностью перемещения в подвесных направляющих 8, смонтированных в верхней части первого этажа, между приемными площадками 4 и шахтой подъемника 2, выше платформы 3, установленной в нижнем положении (см. фиг. 1). Чтобы не препятствовать взаимным перемещениям платформы 3 подъемника и тележки 7, направляющие 8 размещены за пределами шахты подъемника.
На тележке 7 посредством поворотного механизма 9 закреплена прямоугольная рама 10 с каретками 11, перемещающимися в продольных направляющих рамы 10.
В направляющих каждой из кареток 11 установлены две поперечно подвижные каретки 12 с закрепленными на них телескопическими стойками 13, на концах которых размещены захваты, выполненные, каждый, в виде пары поворотных опор 14 для колеса автомобиля.
Манипулятор оснащен датчиками 15 для определения положения автомобиля, размещенными по периметру рамы 10, и датчиками для определения положения захватов относительно автомобиля, размещенными на телескопических стойках 13 (на чертежах не показаны).
Загрузка автомобиля в автостоянку осуществляется следующим образом. Автомобиль 6 въезжает на одну из приемных площадок 4, расположенных в уровне подъездных путей. При этом автомобиль 6 может быть ориентирован любым произвольным образом в пределах разметки 16 площадки (см. фиг. 4). Водитель покидает автомобиль, предварительно подготовив его к хранению. Дальнейшее перемещение автомобиля 6 внутри стоянки осуществляется автоматически.
Тележка 7 манипулятора 5 перемещается в зону приемной площадки 4 с прибывшим автомобилем и останавливается над автомобилем 6 (см. фиг. 5).
Датчики 15 определяют положение автомобиля относительно манипулятора. Показания этих и других датчиков служат основанием для работы системы управления, которая вырабатывает управляющие команды для приводных механизмов манипулятора.
Если положение осей рамы 10 и автомобиля 6 не совпадает, то включается привод поворотного механизма 9, который поворачивает раму 10, ориентируя ее аналогично автомобилю (см. фиг. 6).
Используя показания датчиков, система управления производит выставление поворотных опор 14 относительно колес автомобиля.
Сначала выполняются горизонтальные перемещения захватов посредством перемещения кареток 11 и 12. Затем - вертикальные перемещения посредством телескопических стоек 13, которые раздвигаясь, опускают поворотные опоры 14 вниз. Датчики, расположенные на телескопических стойках 13, отслеживают положение опор 14 относительно колеса автомобиля.
Механизмы кареток 11 и 12 и телескопических стоек 13 обеспечивают перемещения захватов в декартовой системе координат, механизм поворота 9 служит для угловой ориентации захватов относительно вертикальной оси манипулятора.
После проверки правильности установки захватов система управления выдает сигнал на привод поворотных опор 14, которые поворачиваются и вводятся в просветы между основанием площадки 4 и колесом 17 автомобиля, располагаясь по сторонам от точки опоры колеса (см. фиг. 7).
Включается привод телескопических стоек 13, которые, синхронно складываясь, приподнимают автомобиль 6 над площадкой 4.
Выполняя поворот механизма 9, выравнивают положение рамы 10 манипулятора, а вместе с ней и удерживаемого автомобиля 6 до нужного положения, соответствующего положению платформы 3 подъемника 2 (см. фиг. 8). Выравнивание ориентации рамы 10 и подъем автомобиля могут производиться как поочередно, так и одновременно.
Дальнейшим сложением телескопических стоек 13 выполняют полный подъем автомобиля до заданного уровня и путем перемещения тележки 7 в направляющих 8, перемещают автомобиль 6 к подъемнику 2 (см. фиг. 9).
Включается привод раздвижения телескопических стоек 13, и автомобиль опускается на платформу 3 подъемника, на которой предварительно может быть размещен поддон.
Поворотные опоры 14 переводятся в исходное «раскрытое» положение, стойки 13 поднимаются. Манипулятор 5 перемещается в зону той же или другой приемной площадки 4 для перемещения следующего автомобиля.
Дальнейший подъем автомобиля на нужный уровень и перемещение в ячейку хранения осуществляют в соответствии с конкретной схемой внутреннего устройства стоянки (в рамках этой заявки не рассматривается и может быть любой).
Для выгрузки автомобиля из стоянки вышеупомянутые действия манипулятора осуществляются в обратном порядке.
Как видно из приведенного примера, манипулятор 5 может забирать автомобиль с одного уровня - уровня приемной площадки 4, и устанавливать его на другой уровень, например, на платформу ножничного подъемника, что снимает необходимость устройства специальных фундаментов для заглубления последнего или использования аппарелей.
В приведенном примере осуществления один манипулятор обслуживает обе приемные площадки 4.
В других случаях, для повышения производительности и пропускной способности автостоянки может быть использовано несколько независимых манипуляторов, для каждой приемной площадки свой, отдельный манипулятор.
Использование нескольких манипуляторов позволяет производить их ремонт и техническое обслуживание без полной остановки стоянки, т.к. на время остановки одного устройства, второй манипулятор может заменять его.

Изобретение относится к сооружениям специального назначения, предназначенным для размещения и хранения транспортных средств. Автоматизированная стоянка для автомобилей содержит размещенные ярусами ячейки для хранения автомобилей, по меньшей мере, одну приемную площадку для въезда и выезда автомобилей, подъемник и манипулятор для перемещения автомобиля с приемной площадки на платформу подъемника и обратно. Суть предлагаемого решения заключается в том, что манипулятор установлен с возможностью перемещения над приемной площадкой и платформой подъемника, приведенной в нижнее положение, и с возможностью фиксированных остановок над каждой из них. При этом манипулятор оснащен подвижными захватами и датчиками для определения положения автомобиля и определения положения захватов относительно автомобиля. Датчики связаны с системой управления, осуществляющей в соответствии с показаниями датчиков управление приводными механизмами манипулятора и захватов. Достигаемые технические результаты заключаются в повышении удобства парковки за счет снижения требований к точности размещения автомобиля на приемной площадке, в повышении надежности работы стоянки в условиях высокой загрязненности принимаемых автомобилей, в возможности разноуровневого размещения приемной площадки и платформы подъемника. 2 з.п. ф-лы, 9 ил.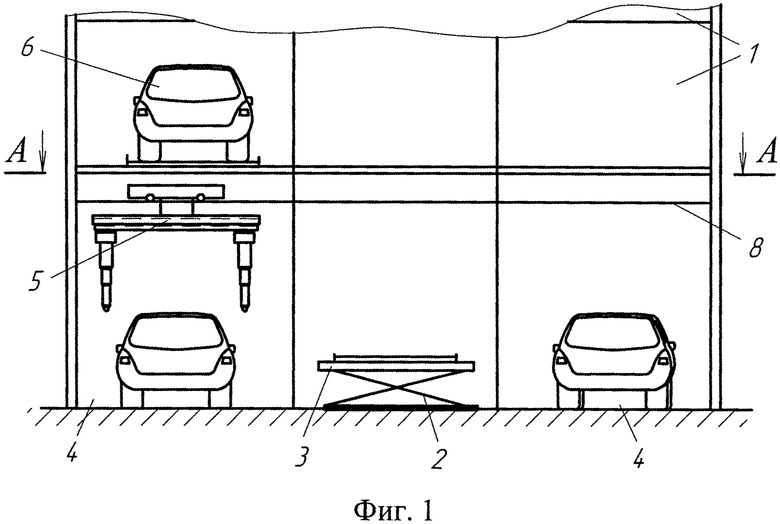
1. Автоматизированная стоянка для автомобилей, содержащая размещенные ярусами ячейки для хранения автомобилей, по меньшей мере, одну приемную площадку для въезда и выезда автомобилей, подъемник и манипулятор для перемещения автомобиля с приемной площадки на платформу подъемника и обратно, отличающаяся тем, что манипулятор выполнен с возможностью перемещения над приемной площадкой и платформой подъемника, установленной в нижнем положении, и с возможностью фиксированных остановок над каждой из них, и оснащен подвижными захватами и датчиками для определения положения автомобиля и определения положения захватов относительно автомобиля, связанными с системой управления приводными механизмами манипулятора и захватов.
2. Стоянка по п. 1, отличающаяся тем, что манипулятор включает установленную с возможностью перемещения вдоль подвесных направляющих тележку, связанную с ней посредством поворотного механизма раму с каретками, установленными с возможностью перемещения в продольных направляющих рамы, и телескопические стойки, основания которых установлены на каретках с возможностью поперечного, относительно движения кареток, перемещения, при этом захваты размещены на концах телескопических стоек и выполнены, каждый, в виде пары поворотных опор для колеса автомобиля.
3. Стоянка по п. 2, отличающаяся тем, что датчики для определения положения автомобиля размещены по периметру рамы, а датчики для определения положения захватов относительно автомобиля установлены на телескопических стойках.
| АВТОМАТИЧЕСКИЙ МНОГОЭТАЖНЫЙ ГАРАЖ-ПЕНАЛ | 2004 |
|
RU2324040C2 |
| RU 2059780 C1, 10.05.1996 | |||
| RU 2060333 C1, 20.05.1996 | |||
| МОДУЛЬ МНОГОЭТАЖНОГО ГАРАЖА | 2008 |
|
RU2370608C1 |
| WO 2013037410 A1, 21.03.2013 | |||
| US 8011870 B2, 06.09.2011 | |||
| US 20110082588 A1, 07.04.2011. | |||

