Изобретение относится к области измерительной техники, к испытаниям, доводке и эксплуатации всех типов газотурбинных двигателей (ГТД), к способам доставки измерительного элемента в заданную позицию при замерах параметров газового потока, к проведению инженерных и сертификационных испытаний ГТД, к верификации расчетных моделей узлов двигателей. Данный способ может применяться при проведении испытаний наземных газотурбинных установок (ГТУ) и на установках для испытаний узлов двигателей.
Известен способ измерения параметров потока на выходе из сопла ГТД (Заявка №95101345/06, МПК G01M 15/00, публ. 20.11.1996 г.). Доставка измерительного элемента, закрепленного на гребенке, в заданную позицию осуществляется с помощью подвижного пилона, перемещаемого вдоль самого себя в одну сторону и в другую сторону от центра сопла, на расстояние, равное полушагу между датчиками гребенки.
Недостатком известного способа является невозможность доставки измерительного элемента в диапазон точек, покрывающих весь объем потока, отсутствие контроля доставки измерительного элемента в заданную позицию относительно среза сопла ГТД.
Наиболее близким к предлагаемому изобретению по технической сущности и достигаемому техническому результату и выбранным за прототип является способ доставки измерительного элемента в заданную позицию при замерах параметров газового потока, разработанный группой компаний SAFRAN совместно с ее партнерами. Презентация данного способа представлена на сайте http://mermose.onera.fr/en от 10.06.2014.
Для реализации способа используют промышленный робот (ПР) и гребенку с измерительным элементом, закрепляемую на конечном элементе ПР - фланце.
При осуществлении известного способа измерения гребенку с измерительным элементом закрепляют на фланце ПР, позиционируют гребенку по заданным позициям управляющей программы, осуществляют измерения и анализ пробы газового потока за срезом сопла ГТД.
Недостатком прототипа является отсутствие контроля доставки измерительного элемента в заданную позицию относительно среза сопла ГТД.
На точность доставки измерительного элемента в заданную позицию влияют следующие составляющие: низкая абсолютная точность ПР, отклонение фактической позиции ПР от заданной, под влиянием газового потока ГТД на гребенку, закрепленную на фланце ПР, деформация гребенки и смещение ГТД под воздействием силы и температуры газового потока. На практике отклонения ПР под нагрузкой от газового потока могут составлять до 10 мм, деформации гребенки - 10 мм, смещение ГТД - 10 мм. Величины отклонений зависят от многих параметров, в том числе тяги двигателя, скорости, температуры и давления газового потока, конструкции гребенки и ее ориентации в газовом потоке, модели ПР, конфигурации ПР в заданной позиции и пр.
Технической задачей заявляемого изобретения является обеспечение доставки измерительного элемента в заданную позицию, в широком диапазоне точек, в режиме реального времени.
Технический результат достигается тем, что в способе доставки измерительного элемента в заданную позицию, заключающемся в том, что на фланце ПР закрепляют гребенку с измерительным элементом, позиционируют гребенку по заданным позициям управляющей программы ПР, осуществляют измерения и анализ пробы газового потока ГТД, согласно изобретению в процессе позиционирования измерительного элемента в заданной позиции управляющей программы ПР дополнительно применяют систему отслеживания смещения ГТД, применяют систему отслеживания отклонения фактической позиции ПР от заданной, измеряют в режиме реального времени фактическое смещение ГТД, отклонение фактической позиции ПР от заданной, затем вычисляют фактическое положение измерительного элемента относительно ГТД, сравнивают вычисленное фактическое значение с позицией ПР в соответствии с управляющей программой, передают в ПР необходимое значение коррекции для перемещения измерительного элемента в заданную позицию относительно ГТД.
Кроме того, согласно изобретению в процессе позиционирования измерительного элемента в заданной позиции управляющей программы промышленного робота дополнительно применяют систему отслеживания деформации гребенки, измеряют фактическую деформацию гребенки в режиме реального времени и сравнивают фактическую позицию измерительного элемента, с учетом измеренной фактической деформации гребенки, с заданной.
Кроме того, согласно изобретению дополнительно после перемещения измерительного элемента в заданную позицию относительно газотурбинного двигателя повторно оценивают отклонение фактической позиции измерительного элемента от заданной и в случае необходимости корректируют положение промышленного робота.
В предлагаемом изобретении, в отличие от прототипа, позиционирование измерительного элемента относительно ГТД, производится в режиме реального времени с точностью используемых систем слежения. Полученная точность позиционирования измерительного элемента относительно ГТД расширяет сферу применения роботизированного комплекса и позволяет проводить не только инженерные и сертификационные испытания ГТД, но и испытания, необходимые для доводки узлов элементов двигателя. Кроме того, полученные данные параметров газового потока, измеренные в заданных позициях, позволяют осуществлять верификацию расчетных моделей узлов двигателей.
Использование системы отслеживания смещения ГТД и системы отслеживания отклонения фактической позиции ПР от заданной позволяет выявить и скомпенсировать смещение двигателя под воздействием силы и температуры газового потока, повысить абсолютную точность ПР, компенсировать отклонение фактической позиции ПР от заданной, вызванное влиянием газового потока ГТД на гребенку, закрепленную на фланце ПР, в режиме реального времени.
Использование системы отслеживания деформации гребенки позволяет выявить и скомпенсировать деформацию гребенки под воздействием силы и температуры газового потока в режиме реального времени.
Повторная оценка отклонения фактической позиции измерительного элемента от заданной и корректировка положения промышленного робота, в случае необходимости, позволяют убедиться в доставке измерительного элемента в заданную позицию.
Для повышения абсолютной точности ПР, выявления отклонения фактической позиции ПР от заданной, под влиянием газового потока двигателя на гребенку, закрепленную на фланце ПР, выявления деформации гребенки и смещения ГТД под воздействием силы и температуры газового потока могут использоваться системы слежения, позволяющие вычислять положение объектов в пространстве в шести степенях свободы. Такими системами могут являться системы оптического зрения, лазерные системы, системы внутрицехового позиционирования, оптоволоконные датчики и любые другие системы с функцией вывода информации об отслеживаемом объекте в шести степенях свободы.
В зависимости от типа системы слежения, объектами отслеживания могут являться метки, светодиоды, сферические отражатели, инфракрасные датчики и пр. При проведении испытаний объекты отслеживания крепятся на гребенке с измерительным элементом, ПР, а также на ГТД.
На гребенке могут быть размещены измерительные элементы, позволяющие измерять следующие параметры: давление, температуру, вектор скорости, акустические характеристики газового потока и пр., а также пробоотборники для отбора газовой пробы на химический анализ и определение эмиссионных характеристик.
Благодаря обширной рабочей зоне ПР и наличию систем, обеспечивающих доставку измерительного элемента в заданную позицию, относительно ГТД, настоящий способ измерения параметров газового потока может быть применен для проведения испытаний всех типов ГТД, для проведения испытаний наземных ГТУ и на установках для испытаний узлов двигателей.
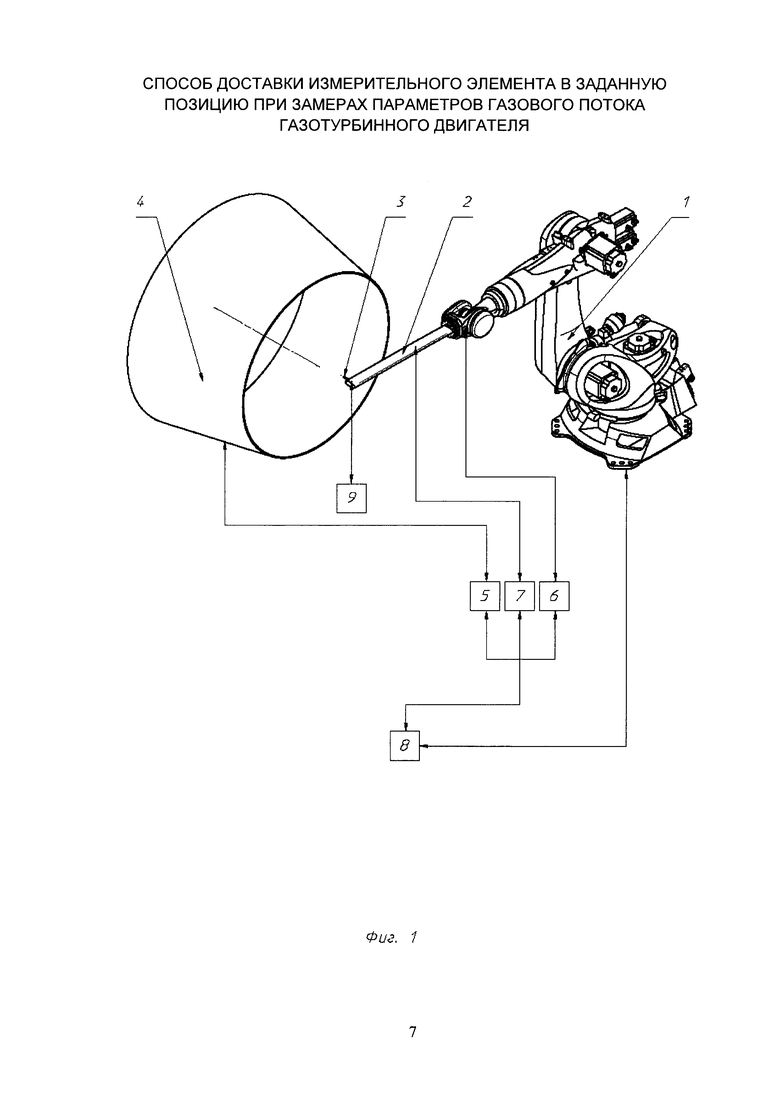
На фиг. 1 представлена схема реализации способа доставки измерительного элемента в заданную позицию при замерах параметров газового потока газотурбинного двигателя.
Способ реализуется следующим образом: на фланце ПР 1 закрепляют гребенку 2 с измерительным элементом 3, позиционируют гребенку 2 по заданным позициям управляющей программы ПР 1, в процессе позиционирования применяют систему отслеживания смещения 5 ГТД 4, систему отслеживания отклонения фактической позиции 6 ПР 1 от заданной, систему отслеживания деформации 7 гребенки 2, измеряют в режиме реального времени фактическое смещение ГТД 4, отклонение фактической позиции ПР 1 от заданной, фактическую деформацию гребенки 2, затем вычисляют фактическое положение измерительного элемента 3 относительно ГТД 4 с помощью системы 8, сравнивают вычисленное фактическое значение с позицией ПР 1 в соответствии с управляющей программой, передают в ПР 1 необходимое значение коррекции для перемещения измерительного элемента 2 в заданную позицию относительно ГТД 4, после перемещения измерительного элемента 3 в заданную позицию относительно ГТД 4 повторно оценивают отклонение фактической позиции измерительного элемента 3 от заданной и, в случае необходимости, повторно корректируют положение ПР 1. После прихода измерительного элемента 3 в заданную позицию измерительная аппаратура 9 осуществляет измерения и анализ пробы газового потока.
Таким образом, выполнение предлагаемого изобретения с вышеуказанными отличительными признаками, в совокупности с известными признаками, заявляемого изобретения позволяет обеспечить контроль и доставку измерительного элемента в заданную позицию, относительно ГТД, в режиме реального времени.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения газодинамических параметров потока двигателя | 2020 |
|
RU2738296C1 |
| Способ имитации обледенения на объекте исследования | 2021 |
|
RU2766927C1 |
| СПОСОБ КОНТРОЛЯ СИСТЕМЫ ОХЛАЖДЕНИЯ ЛОПАТОК ТУРБИНЫ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2018 |
|
RU2696067C1 |
| СПОСОБ СЕРИЙНОГО ПРОИЗВОДСТВА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ И ГАЗОТУРБИННЫЙ ДВИГАТЕЛЬ, ВЫПОЛНЕННЫЙ ЭТИМ СПОСОБОМ | 2013 |
|
RU2555935C2 |
| СПОСОБ СЕРИЙНОГО ПРОИЗВОДСТВА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ И ГАЗОТУРБИННЫЙ ДВИГАТЕЛЬ, ВЫПОЛНЕННЫЙ ЭТИМ СПОСОБОМ | 2013 |
|
RU2555938C2 |
| ГАЗОТУРБИННЫЙ ДВИГАТЕЛЬ | 2013 |
|
RU2556090C2 |
| ГАЗОТУРБИННЫЙ ДВИГАТЕЛЬ, СПОСОБ ИСПЫТАНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ (ВАРИАНТЫ), СПОСОБ ПРОИЗВОДСТВА ПАРТИИ ГАЗОТУРБИННЫХ ДВИГАТЕЛЕЙ (ВАРИАНТЫ), СПОСОБ ЭКСПЛУАТАЦИИ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2011 |
|
RU2482459C1 |
| СПОСОБ СЕРИЙНОГО ПРОИЗВОДСТВА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ И ГАЗОТУРБИННЫЙ ДВИГАТЕЛЬ, ВЫПОЛНЕННЫЙ ЭТИМ СПОСОБОМ | 2013 |
|
RU2551142C1 |
| СПОСОБ ИЗМЕРЕНИЯ АКУСТИЧЕСКИХ ХАРАКТЕРИСТИК ГАЗОВЫХ СТРУЙ НА СРЕЗЕ ВЫХОДНЫХ УСТРОЙСТВ ГТД И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2531057C2 |
| СПОСОБ ДОВОДКИ ОПЫТНОГО ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2013 |
|
RU2551003C1 |
Изобретение относится к области измерительной техники, к испытаниям, доводке и эксплуатации всех типов газотурбинных двигателей (ГТД), к способам доставки измерительного элемента в заданную позицию при замерах параметров газового потока, к проведению инженерных и сертификационных испытаний ГТД, к верификации расчетных моделей узлов двигателей. В данном способе дополнительно применяют систему отслеживания смещения ГТД, применяют систему отслеживания отклонения фактической позиции ПР от заданной, измеряют в режиме реального времени фактическое смещение ГТД, отклонение фактической позиции ПР от заданной, затем вычисляют фактическое положение измерительного элемента относительно ГТД, сравнивают вычисленное фактическое значение с позицией ПР в соответствии с управляющей программой, передают в ПР необходимое значение коррекции для перемещения измерительного элемента в заданную позицию относительно ГТД. Кроме того, дополнительно применяют систему отслеживания деформации гребенки, измеряют фактическую деформацию гребенки в режиме реального времени и сравнивают фактическую позицию измерительного элемента, с учетом измеренной фактической деформации гребенки, с заданной. Кроме того, дополнительно после перемещения измерительного элемента в заданную позицию относительно ГТД повторно оценивают отклонение фактической позиции измерительного элемента от заданной и в случае необходимости повторно корректируют положение ПР. Технический результат изобретения – обеспечение доставки измерительного элемента в заданную позицию относительно ГТД в режиме реального времени. 2 з.п. ф-лы, 1 ил.
1. Способ доставки измерительного элемента в заданную позицию при замерах параметров газового потока газотурбинного двигателя, заключающийся в том, что на фланце промышленного робота закрепляют гребенку с измерительным элементом, позиционируют гребенку по заданным позициям управляющей программы промышленного робота, осуществляют измерения и анализ пробы газового потока газотурбинного двигателя, отличающийся тем, что в процессе позиционирования измерительного элемента в заданную позицию управляющей программы промышленного робота дополнительно применяют систему отслеживания смещения газотурбинного двигателя, применяют систему отслеживания отклонения фактической позиции промышленного робота от заданной, измеряют в режиме реального времени фактическое смещение газотурбинного двигателя, отклонение фактической позиции промышленного робота от заданной, затем вычисляют фактическое положение измерительного элемента относительно газотурбинного двигателя, сравнивают вычисленное фактическое значение с позицией промышленного робота в соответствии с управляющей программой, передают в промышленный робот необходимое значение коррекции для перемещения измерительного элемента в заданную позицию относительно газотурбинного двигателя.
2. Способ доставки измерительного элемента в заданную позицию при замерах параметров газового потока по п. 1, отличающийся тем, что в процессе позиционирования измерительного элемента в заданной позиции управляющей программы промышленного робота дополнительно применяют систему отслеживания деформации гребенки, измеряют фактическую деформацию гребенки в режиме реального времени и сравнивают фактическую позицию измерительного элемента, с учетом измеренной фактической деформации гребенки, с заданной.
3. Способ доставки измерительного элемента в заданную позицию при замерах параметров газового потока по п. 1, отличающийся тем, что дополнительно после перемещения измерительного элемента в заданную позицию относительно газотурбинного двигателя повторно оценивают отклонение фактической позиции измерительного элемента от заданной и в случае необходимости корректируют положение промышленного робота.
| SU 95101345 A1, 20.11.1996 | |||
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ПУЛЬСИРУЮЩЕГО ПОТОКА | 2014 |
|
RU2559566C1 |
| Способ очистки буровой воды при получении из нее йода | 1960 |
|
SU143783A1 |
| Магнитная логическая схема | 1957 |
|
SU122935A1 |
| US 5365795 A, 22.11.1994 | |||
| СПОСОБ ПОЛУЧЕНИЯ КРАСНОГО ПИЩЕВОГО КРАСИТЕЛЯ | 1995 |
|
RU2086590C1 |

