Изобретение относится к области измерительной техники, к испытаниям, доводке и эксплуатации всех типов газотурбинных двигателей (ГТД), к способам определения газодинамических параметров, к проведению инженерных и сертификационных испытаний ГТД (двигателей), к верификации расчетных моделей узлов газотурбинных двигателей.
Данный способ может применяться при проведении испытаний газотурбинных двигателей для определения газодинамических параметров (полное и статической давление, температура) за соплами, реверсивными устройствами ГТД и конструктивными элементами ГТД при испытании отдельных узлов в составе стационарных установок по аэродинамическому исследованию узлов ГТД.
Известен способ доставки измерительного элемента в заданную позицию при замерах параметров газового потока, разработанный группой компаний SAFRAN. Для реализации способа используют промышленный робот (ПР) и гребенку с измерительным элементом, закрепляемую на конечном элементе ПР – фланце.
При осуществлении известного способа измерения гребенку с измерительным элементом закрепляют на фланце ПР, позиционируют гребенку по заданным позициям управляющей программы, осуществляют измерения и анализ пробы газового потока за срезом сопла ГТД.
Недостатком известного способа является отсутствие контроля доставки измерительного элемента в заданную позицию относительно среза сопла ГТД и отсутствие параметрического задания смены позиций ПР при проведении измерений.
Известен способ доставки измерительного элемента в заданную позицию при замерах параметров газового потока (Патент RU 2641182, МПК G01M 15/14, опубл. 16.01.2018) в котором движение между заданными позициями ПР осуществляется по заранее программируемой траектории, без возможности ее изменения в процессе измерения.
Для реализации способа на фланце ПР закрепляют гребенку с измерительным элементом, позиционируют гребенку по заданным позициям управляющей программы ПР, осуществляют измерения и анализ пробы газового потока ГТД.
В процессе позиционирования измерительного элемента в заданной позиции управляющей программы ПР дополнительно применяют систему отслеживания смещения ГТД – отклонений фактической позиции ПР от заданной, измеряют в режиме реального времени фактическое смещение ГТД, отклонение фактической позиции ПР от заданной, затем вычисляют фактическое положение измерительного элемента относительно ГТД, сравнивают вычисленное фактическое значение с позицией ПР в соответствии с управляющей программой, передают в ПР необходимое значение коррекции для перемещения измерительного элемента в заданную позицию относительно ГТД.
Недостатком способа является отсутствие адаптивного, определяемого в автоматическом режиме, алгоритма перемещения гребенки между позициями ПР при измерении газодинамических параметров потока. Движение между позициями ПР осуществляется по заранее программируемой траектории и не изменяется в процессе измерения.
Наиболее близким к предлагаемому изобретению по технической сущности и достигаемому техническому результату и выбранным за прототип является способ и устройство измерения загрязняющих веществ, содержащихся в выхлопе двигателя (Патент RU №2679688, МПК G01M 15/10, F01N 11/00 (2006.01), опубл. 12.02.2019) заключающийся в том, что на фланце промышленного робота закрепляют гребенку с измерительным элементом, располагают гребенку так, чтобы измерительный элемент указанной гребенки находился на поверхности измерения, расположенной на выходе газотурбинного двигателя в выхлопном потоке, позиционируют гребенку по заданным позициям управляющей программы промышленного робота, непрерывно перемещают гребенку по заданной траектории, производят измерение параметров выходного потока при помощи гребенки, активируют блок анализа, связанный с гребенкой, для считывания параметров выхлопного потока, считывают параметры выхлопного потока с одинаковой частотой в течении всего измерения, обрабатывают данные полученные блоком анализа в соответствии с положением измерительного элемента гребенки, перемещают гребенку с постоянным мониторингом поверхности за единицу времени, продолжая при этом измерение и считывание параметров выхлопного потока, измеряемых с помощью гребенки.
Недостатком прототипа является отсутствие контроля точности положения измерительной гребенки и отсутствие возможности в режиме реального времени изменять параметры и тип движения ПР по заданной траектории в случае изменения значений исследуемых параметров двигателя.
Технической проблемой, решение которой обеспечивается при осуществлении предлагаемого изобретения, и невозможно обеспечить при использовании прототипа является невысокая точность измерений и отсутствие возможности изменять параметры и тип движения ПР в режиме реального времени в случае изменения значений исследуемых параметров двигателя.
Технической задачей заявляемого изобретения является повышение точности измерения потока двигателя в режиме реального времени.
Техническая проблема решается за счет того что в способе определения газодинамических параметров потока двигателя, заключающимся в том, что на фланце промышленного робота закрепляют гребенку с измерительным элементом, располагают гребенку так, чтобы измерительный элемент указанной гребенки находился на поверхности измерения, расположенной на выходе газотурбинного двигателя в выхлопном потоке, позиционируют гребенку по заданным позициям управляющей программы промышленного робота, непрерывно перемещают гребенку по заданной траектории, производят измерение параметров выходного потока при помощи гребенки, активируют блок анализа, связанный с гребенкой, для считывания параметров выхлопного потока, считывают параметры выхлопного потока с одинаковой частотой в течении всего измерения, обрабатывают данные полученные блоком анализа в соответствии с положением измерительного элемента гребенки, перемещают гребенку с постоянным мониторингом поверхности за единицу времени, продолжая при этом измерение и считывание параметров выхлопного потока, измеряемых с помощью гребенки, согласно изобретению, гребенку перемещают по зигзагообразной или спиралевидной траектории, перемещение гребенки задают на основе моделирования структуры потока управляющей программы, дополнительно применяют систему контроля изменения параметров потока, установленную в блоке анализа и конструктивно связанную с измерительным элементом гребенки, фактические параметры сравнивают с заданным диапазоном, при этом, если наблюдается отклонение фактических параметров от заданных, траектория движения гребенки корректируется путем добавления дополнительных позиций для измерения с уменьшением шага и скорости движения либо только путем уменьшения скорости ее движения, без построения дополнительных позиций , если параметры в текущей позиции отличаются от предыдущей не существенно, меньше заданного значения, траектория движения не сегментируется и скорость перемещения гребенки увеличивается на заданную величину.
В предлагаемом изобретении, на фланце промышленного робота закрепляют гребенку с измерительным элементом, располагают гребенку так, чтобы измерительный элемент указанной гребенки находился на поверхности измерения, расположенной на выходе газотурбинного двигателя в выхлопном потоке, позиционируют гребенку по заданным позициям управляющей программы промышленного робота, непрерывно перемещают гребенку по заданной траектории, производят измерение параметров выходного потока при помощи гребенки, активируют блок анализа, связанный с гребенкой, для считывания параметров выхлопного потока, считывают параметры выхлопного потока с одинаковой частотой в течении всего измерения, обрабатывают данные полученные блоком анализа в соответствии с положением измерительного элемента гребенки, перемещают гребенку с постоянным мониторингом поверхности за единицу времени, продолжая при этом измерение и считывание параметров выхлопного потока, измеряемых с помощью измерительной гребенки.
В предлагаемом изобретении, в отличии от прототипа, перемещение гребенки по зигзагообразной или спиралевидной траектории позволяет повысить точность измерения газодинамических параметров за счет большей площади измерения. Тип движения измерительной гребенки выбирается исходя из вида конструктивного элемента для которого выполняется измерение газодинамических параметров. Так, для ГТД, в зависимости от наличия или отсутствия внутреннего тела (внутреннего сопла), геометрии поля измерения, габаритных размеров двигателя при выполнении измерений будет назначаться зигзагообразный или спиралевидный тип движения измерительной гребенки.
Перемещение гребенки задают на основе математической модели структуры потока, которая определяется на предварительном этапе при помощи специализированного программного обеспечения для конкретного конструктивного элемента. Исходя из полученной модели, программируется управляющая программа для движения измерительной гребенки.
Дополнительно применяют систему контроля изменения газодинамических параметров потока, установленную в блоке анализа. В нем производится запись и обработка данных с высокой частотой, полученных с датчиков давления и температуры. Так, реализуется мониторинг параметров в режиме реального времени для обеспечения работы адаптивного алгоритма.
Перемещение гребенки задают на основе адаптивного алгоритма построения траектории движения между позициями ПР. При движении измерительной гребенки в блоке анализа непрерывно диагностируется признак существенного и несущественного изменения значения контрольных параметров потока и последующее автоматическое увеличение количества позиций измерения с уменьшением шага перемещения измерительной гребенки или уменьшение скорости ее движения (без увеличения количества позиций) для более детального изучения потока. Величина уменьшения шага перемещения датчика может быть любой константой и определенной, например, на основе предварительного расчетного моделирования. В общем случае величина уменьшения шага перемещения может быть функцией и носить более сложный, многопараметрический характер.
Позиции, определяющие траекторию движения измерительной гребенки, программируется на предварительном этапе на основе геометрии исследуемого конструктивного элемента и/или исходя из анализа расчетных моделей. В процессе измерения, адаптивный алгоритм определяет, в автоматическом режиме, участки траектории между позициями ПР с существенным изменением параметров (например, давление и температура).
С одной стороны, происходит уплотнение сетки, что существенно повышает точность исследования. Увеличение количества позиций выполняется только на тех участках, где происходит значительное для анализа измерений изменение исследуемых характеристик. С другой стороны, количество позиций, которые не несут информативный признак (исследуемые характеристики изменяются не существенно), уменьшается, что в свою очередь позволит снизить время измерения характеристик и снизить стоимость проведения таких испытаний.
Результатом измерения может быть модель, представленная пространственным распределением газодинамических параметров. За счет адаптивного алгоритма происходит уплотнение сетки позиций измерения только в тех точках, которые будут наиболее эффективны и информативны для повышения точности построения такой модели.
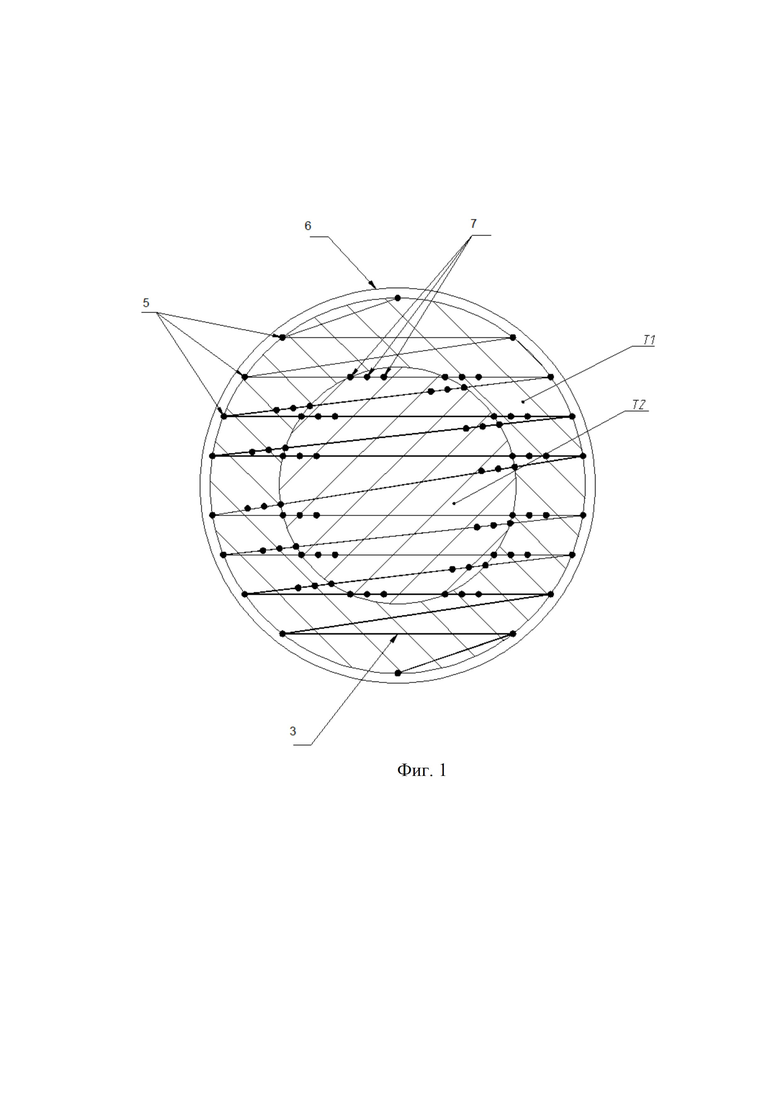
На фиг.1 представлена схема реализации способа определения газодинамических параметров, где 5 – опорные позиции, образующие траекторию перемещения гребенки; 6 – плоскость, в которой производится измерение параметров; 7 – позиции, сформированные в автоматическом режиме при сегментации траектории в виду изменения контрольных параметров; 3 – траектория движения измерительной гребенки; Т1, Т2 – зоны с различными значениями исследуемых параметров.
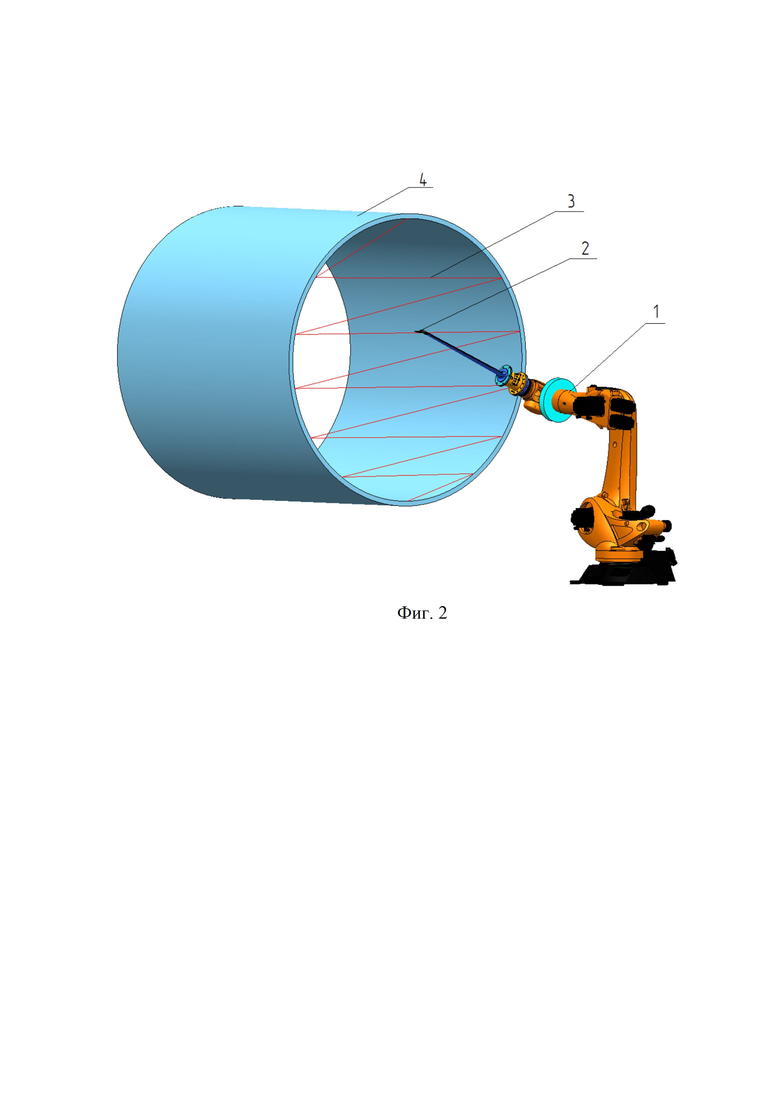
На фиг.2 представлена схема перемещения гребенки по зигзагообразной траектории в исследуемой плоскости без внутреннего тела (внутреннего сопла), где 1 – промышленный робот; 2 – измерительная гребенка; 3 – траектория движения измерительной гребенки; 4 – газотурбинный двигатель.
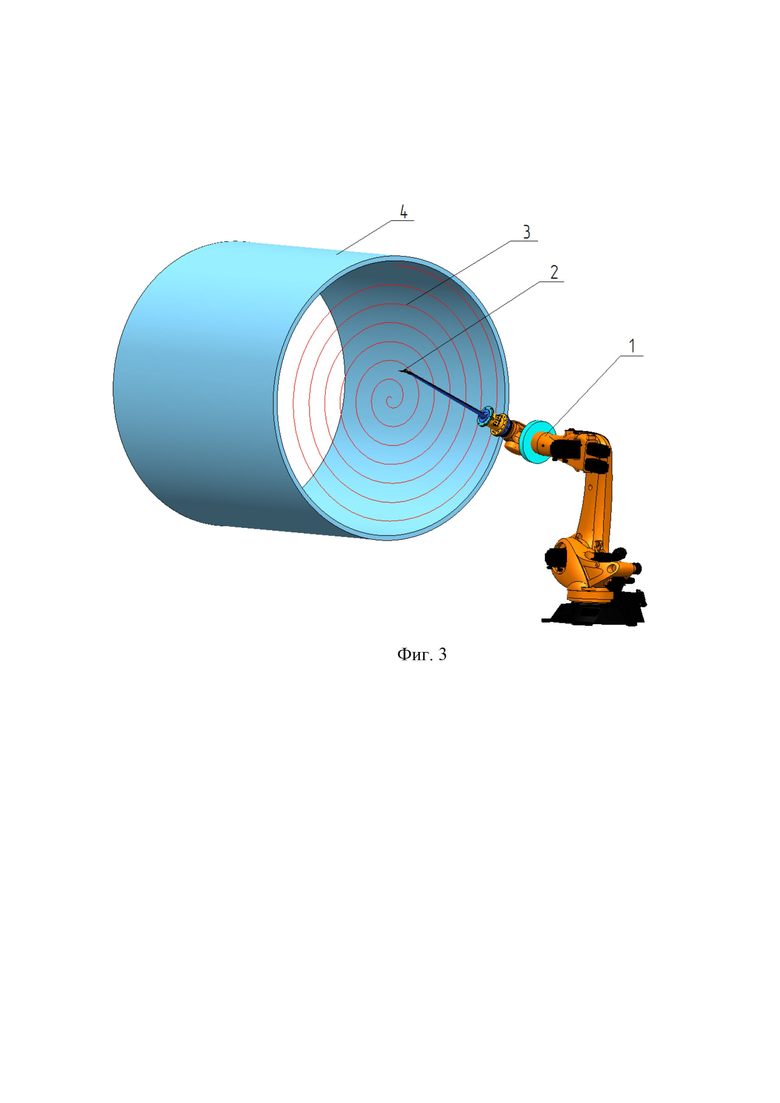
На фиг.3 представлена схема перемещения гребенки по спиралевидной траектории в исследуемой плоскости без внутреннего тела (внутреннего сопла), где 1 – промышленный робот; 2 – измерительная гребенка; 3 – траектория движения измерительной гребенки; 4 – газотурбинный двигатель.
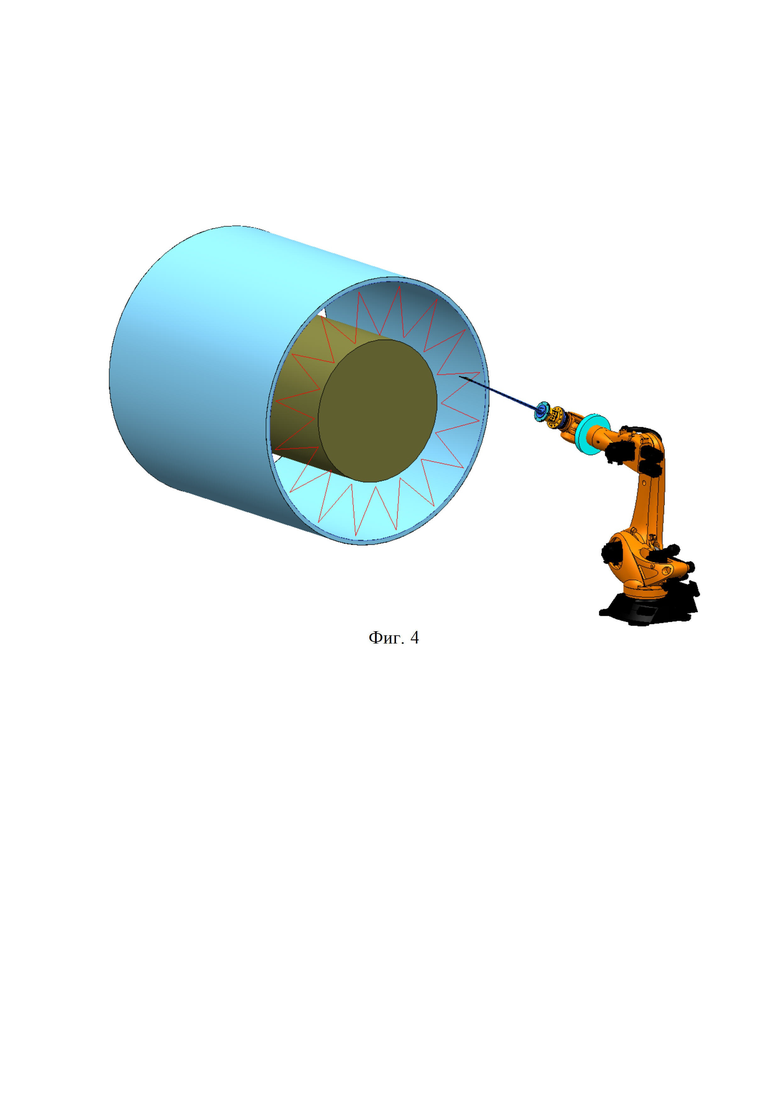
На фиг.4 представлена схема перемещения гребенки по зигзагообразной траектории в исследуемой плоскости при наличии внутреннего тела (внутреннего сопла)
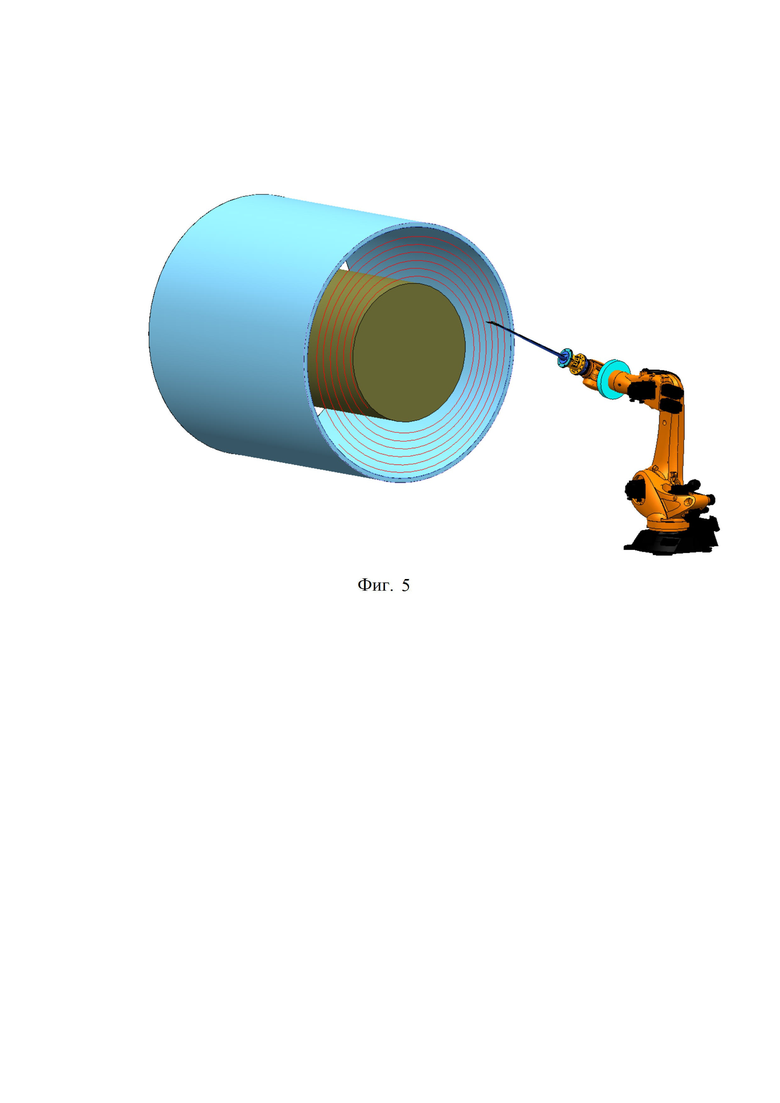
На фиг.5 представлена схема перемещения гребенки по спиралевидной траектории в исследуемой плоскости при наличии внутреннего тела (внутреннего сопла)
Способ реализуется следующим образом
На предварительном этапе, на срезе сопла или другого элемента конструкции расчетным путем определяются позиции измерений 5, в которых необходимо произвести измерения газодинамических параметров. На основе выбранных позиций 5 программируется траектория движения 3 ПР 1 между позициями 5. При движении ПР 1 между позициями 5 в режиме реального времени определяются контрольные характеристики (например, давление и температура). В процессе измерения, если при движении наблюдается существенное изменение контрольных параметров, или, если численное значение данных контрольных параметров (разность значений в текущей позиции и в предыдущей) выходит за пределы параметрически заданного диапазона, адаптивный алгоритм разбивает текущую траекторию на более мелкие с помощью создания дополнительных позиций 7 на данной траектории 3 с более мелким шагом между позициями либо уменьшает скорость движения измерительной гребенки 2, без построения дополнительных позиций. Как только отклонение исследуемых параметров становится не существенным, скорость движения увеличивается на заранее заданную величину.
Таким образом, выполнение предлагаемого изобретения с вышеуказанными отличительными признаками, в совокупности с известными признаками, позволяет обеспечить повышение точности измерений газодинамических параметров потока двигателя за счет использования адаптивного алгоритма определения позиций измерения параметров в режиме реального времени.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДОСТАВКИ ИЗМЕРИТЕЛЬНОГО ЭЛЕМЕНТА В ЗАДАННУЮ ПОЗИЦИЮ ПРИ ЗАМЕРАХ ПАРАМЕТРОВ ГАЗОВОГО ПОТОКА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2016 |
|
RU2641182C1 |
| Способ имитации обледенения на объекте исследования | 2021 |
|
RU2766927C1 |
| СТЕНД ДЛЯ ИСПЫТАНИЙ ГАЗОДИНАМИЧЕСКИХ ПОДШИПНИКОВ | 2014 |
|
RU2556304C1 |
| СПОСОБ СЕРИЙНОГО ПРОИЗВОДСТВА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ И ГАЗОТУРБИННЫЙ ДВИГАТЕЛЬ, ВЫПОЛНЕННЫЙ ЭТИМ СПОСОБОМ | 2013 |
|
RU2555935C2 |
| СПОСОБ ФИНИШНОЙ ОБРАБОТКИ ЗАГОТОВКИ ЛОПАТКИ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2018 |
|
RU2674358C1 |
| ГАЗОТУРБИННЫЙ ДВИГАТЕЛЬ | 2013 |
|
RU2556090C2 |
| СИСТЕМА УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2012 |
|
RU2501964C1 |
| Способ защиты газотурбинного двигателя от помпажа | 2022 |
|
RU2798129C1 |
| Способ автоматической защиты газотурбинного двигателя от помпажа | 2022 |
|
RU2789806C1 |
| СПОСОБ ФИНИШНОЙ ОБРАБОТКИ ЛОПАТКИ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2629419C1 |
Изобретение относится к области измерительной техники, к испытаниям, доводке и эксплуатации всех типов газотурбинных двигателей (ГТД), к способам определения газодинамических параметров, к проведению инженерных и сертификационных испытаний ГТД (двигателей), к верификации расчетных моделей узлов газотурбинных двигателей. Способ определения газодинамических параметров потока двигателя, заключающийся в том, что гребенку перемещают по зигзагообразной или спиралевидной траектории, перемещение гребенки задают на основе моделирования структуры потока управляющей программы, дополнительно применяют систему контроля изменения параметров потока, установленную в блоке анализа и конструктивно связанную с измерительным элементом гребенки, фактические параметры сравнивают с заданным диапазоном, при этом, если наблюдается отклонение фактических параметров от заданных, траектория движения гребенки сегментируется путем добавления дополнительных позиций для измерения с уменьшением шага и скорости движения либо только путем уменьшения скорости движения, если параметры в текущей позиции отличаются от предыдущей несущественно, меньше заданного значения, траектория движения не сегментируется и скорость перемещения гребенки увеличивается на заданную величину. Выполнение предлагаемого изобретения позволяет обеспечить повышение точности измерений газодинамических параметров потока двигателя за счет использования адаптивного алгоритма определения позиций измерения параметров в режиме реального времени. 5 ил.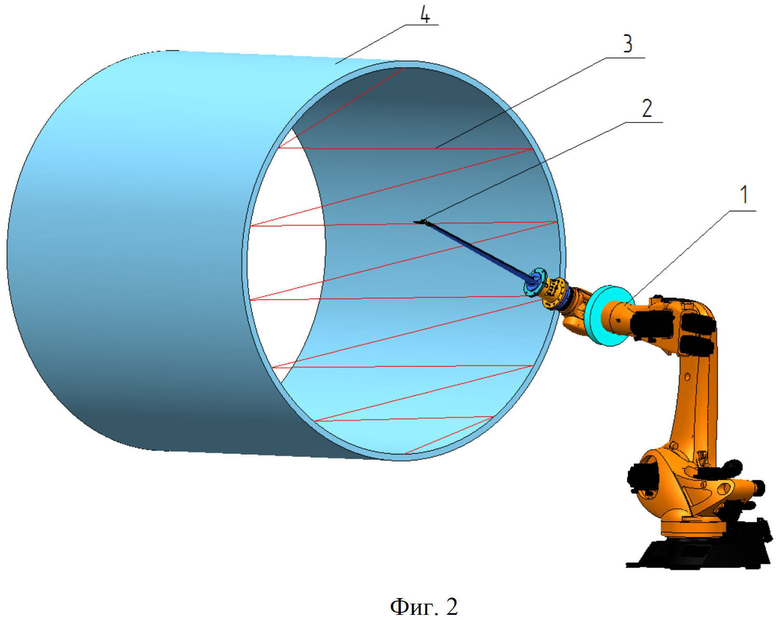
Способ определения газодинамических параметров потока двигателя, заключающийся в том, что на фланце промышленного робота закрепляют гребенку с измерительным элементом, располагают гребенку так, чтобы измерительный элемент указанной гребенки находился на поверхности измерения, расположенной на выходе газотурбинного двигателя в выхлопном потоке, позиционируют гребенку по заданным позициям управляющей программы промышленного робота, непрерывно перемещают гребенку по заданной траектории, производят измерение параметров выходного потока при помощи гребенки, активируют блок анализа, связанный с гребенкой, для считывания параметров выхлопного потока, считывают параметры выхлопного потока с одинаковой частотой в течение всего измерения, обрабатывают данные полученные блоком анализа в соответствии с положением измерительного элемента гребенки, перемещают гребенку с постоянным мониторингом поверхности за единицу времени, продолжая при этом измерение и считывание параметров выхлопного потока, измеряемых с помощью гребенки, отличающийся тем, что гребенку перемещают по зигзагообразной или спиралевидной траектории, перемещение гребенки задают на основе моделирования структуры потока управляющей программы, дополнительно применяют систему контроля изменения параметров потока, установленную в блоке анализа и конструктивно связанную с измерительным элементом гребенки, фактические параметры сравнивают с заданным диапазоном, при этом, если наблюдается отклонение фактических параметров от заданных, траектория движения гребенки сегментируется путем добавления дополнительных позиций для измерения с уменьшением шага и скорости движения либо только путем уменьшения скорости движения, если параметры в текущей позиции отличаются от предыдущей несущественно, меньше заданного значения, траектория движения не сегментируется и скорость перемещения гребенки увеличивается на заданную величину.
| СПОСОБ ДОСТАВКИ ИЗМЕРИТЕЛЬНОГО ЭЛЕМЕНТА В ЗАДАННУЮ ПОЗИЦИЮ ПРИ ЗАМЕРАХ ПАРАМЕТРОВ ГАЗОВОГО ПОТОКА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2016 |
|
RU2641182C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ПУЛЬСИРУЮЩЕГО ПОТОКА | 2014 |
|
RU2559566C1 |
| WO 2019195782 A1, 10.10.2019 | |||
| US 20170082032 A1, 23.03.2017 | |||
| EP 3599453 A3, 13.05.2020. | |||

