Изобретение касается визуализации хирургических процедур, в частности системы и способа детектирования хирургических инструментов в процессе проведения биопсии.
Рак простаты на сегодняшний день является второй из основных причин смерти от рака среди американских мужчин. Во многих случаях пациентам ставится диагноз рака простаты с использованием биопсии под контролем трансректального ультразвукового исследования (ТРУЗИ), проводимой «вслепую». Ультразвуковая визуализация всего лишь направляет иглу в различные области предстательной железы и не может с надежностью визуально обнаружить рак простаты. Многопараметрическая магнитно-резонансная визуализация (МРВ) обладает высокой чувствительностью и специфичностью к обнаружению рака простаты. Предпринимались попытки создания практических способов направления по изображениям, способных соединить ТРУЗИ, проводимое в режиме реального времени, с полученными ранее результатами МРВ для направления игл к распознанным в результате МРВ целевым участкам для проведения диагностики или терапии.
При проведении прицельной биопсии и терапии в отношении простаты под совместным контролем МРВ/ТРУЗИ существует ряд ситуаций, при которых важно знать точное месторасположение биопсийной иглы. Например, местоположение кончика биопсийной иглы играет роль в ретроспективном анализе системы синтеза изображений. При проведении биопсии простаты биопсийную иглу размещают с использованием биопсийного пистолета. Кончик иглы для забора пробы ткани не всегда точно попадает в запланированный целевой участок. Для повторных биопсий врачи могут пожелать провести повторный забор проб в областях, в которых получены вызывающие подозрения результаты, или, наоборот, могут пожелать специально избежать повторного забора проб в областях, в которых получены благоприятные результаты, и целевых областях в промежутках между проведенными ранее биопсиями. В обоих случаях требуется знать точное место забора биопсийных проб, полученных ранее. Кроме того, для планирования фокальной терапии в дополнение к результатам визуализации требуется знать места заборов биопсийных проб, давших положительные результаты.
Согласно настоящим принципам система и способ детектирования медицинского устройства включают в себя систему наведения, выполненную с возможностью доставки хирургического устройства в организм субъекта. Детектор размещения хирургического устройства выполнен с возможностью взаимодействия с системой наведения и выполнен с возможностью детектирования размещения хирургического устройства в организме субъекта. Блок координации выполнен с возможностью приема входных сигналов от системы наведения и детектора размещения для определения и регистрации одного или более из места и времени каждого размещения.
Биопсийная система для детектирования медицинского устройства включает в себя систему наведения, выполненную с возможностью доставки биопсийной иглы в организм субъекта, детектор размещения, выполненный с возможностью детектирования размещения биопсийной иглы и сканирующего зонда, применяемого для визуализации биопсийной иглы, а также устройство визуализации, выполненное с возможностью визуализации размещения. Модуль координации выполнен с возможностью приема входных сигналов от одного или более из системы наведения, детектора размещения и сканирующего зонда с целью регистрации каждого размещения для создания учетной записи места и времени проведения биопсии, связанных с каждым размещением.
Способ детектирования медицинского устройства включает в себя доставку хирургического устройства в организм субъекта с использованием системы наведения; объединение наведения хирургического устройства с автоматическим детектированием и автоматической регистрацией размещения для детектирования события размещения хирургического устройства с помощью одного или более из изображения в режиме реального времени, акустического индикатора, детектора вибраций и системы пространственного отслеживания; а также определение и регистрацию одного или более из места и времени каждого размещения на основе наведения хирургического устройства и автоматического детектирования размещения.
В одном варианте осуществления находят фактические места взятия биопсии, а затем фактические места взятия биопсии наносят на магнитно-резонансные (МР) изображения. Мишени, идентифицированные на изображениях, полученных многопараметрической магнитно-резонансной визуализацией, далее могут корректно сопоставляться с результатами анализа на патологию.
Эти и другие задачи, признаки и преимущества настоящего изобретения станут очевидны из последующего подробного описания проиллюстрированных вариантов его осуществления, изучение которого должно проводиться в сочетании с прилагаемыми чертежами.
Будет представлено подробное описание предпочтительных вариантов осуществления со ссылкой на следующие чертежи, где
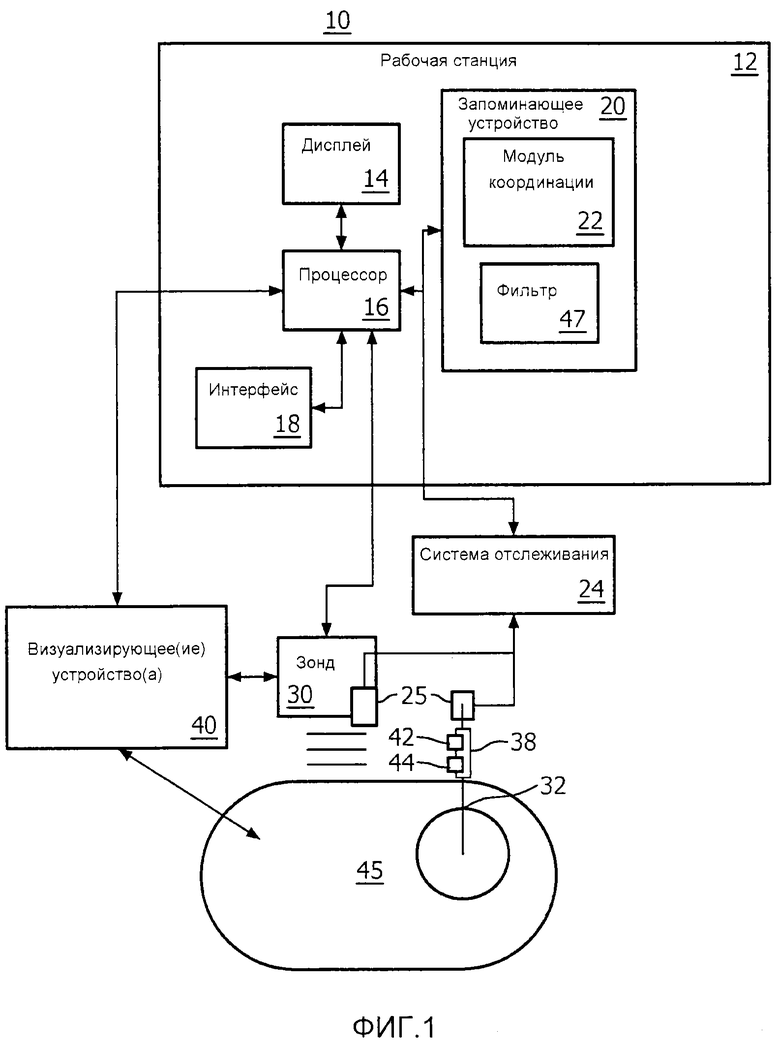
на Фиг. 1 показана блок-диаграмма/блок-схема алгоритма, представляющая систему/способ с использованием наведения хирургического инструмента и детектирования размещения, объединенных между собой, согласно настоящим принципам;
на Фиг. 2 показана блок-диаграмма/блок-схема алгоритма, представляющая систему/способ для последовательности выполняемых действий блока координации для проведения биопсии под контролем изображения согласно настоящим принципам;
на Фиг. 3 показана блок-диаграмма/блок-схема алгоритма, представляющая систему/способ детектирования размещения с использованием изображений в режиме реального времени согласно настоящим принципам;
на Фиг. 4 показана диаграмма, представляющая преобразование ультразвуковых изображений в режиме реального времени и данных отслеживания в референсное изображение согласно одному варианту осуществления;
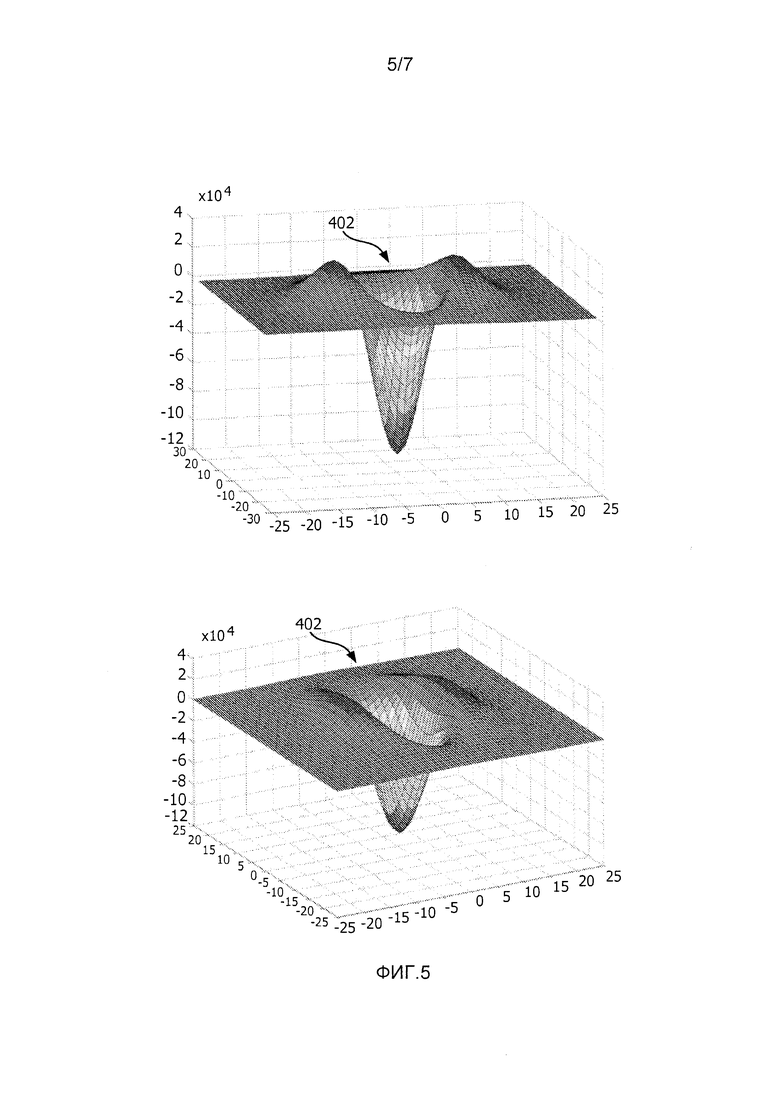
на Фиг. 5 показана диаграмма показательного фильтра, применяемого для выделения биопсийной иглы на изображении согласно одному варианту осуществления;
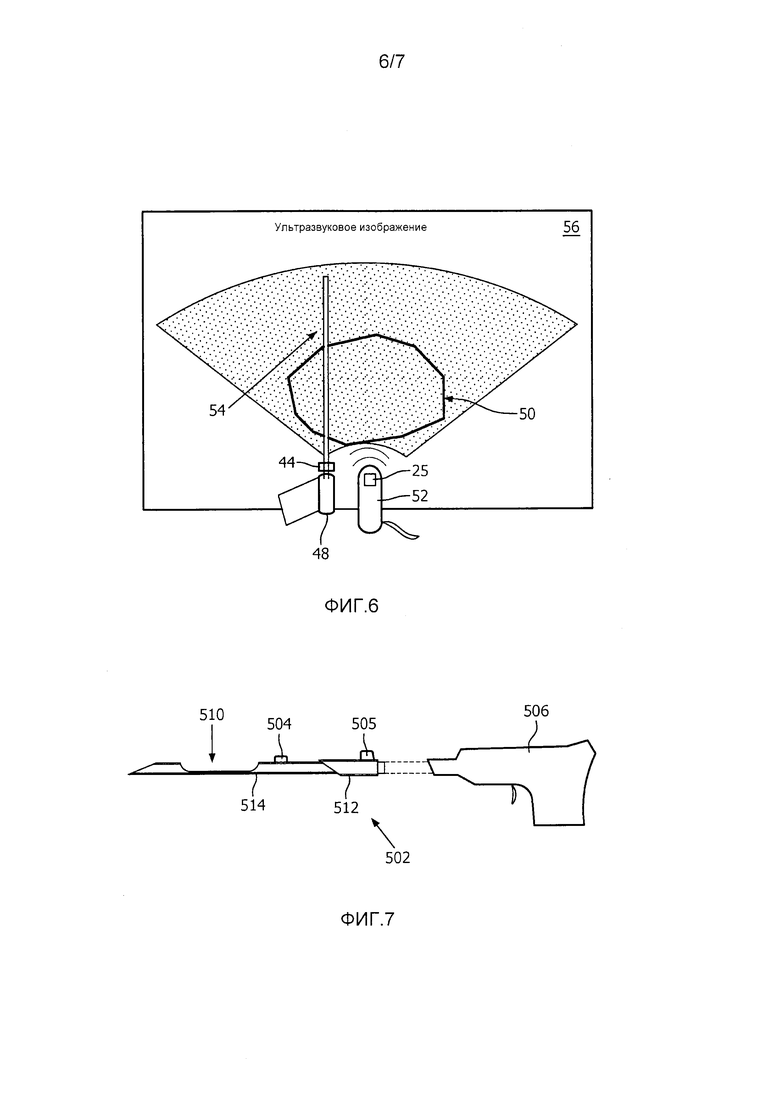
на Фиг. 6 представлено показательное ультразвуковое изображение, иллюстрирующее детектирование размещения иглы на основе движения согласно другому варианту осуществления;
на Фиг. 7 показана диаграмма, изображающая биопсийный пистолет и иглу, имеющие неподвижное устройство отслеживания и подвижное устройство отслеживания на игле согласно другому варианту осуществления;
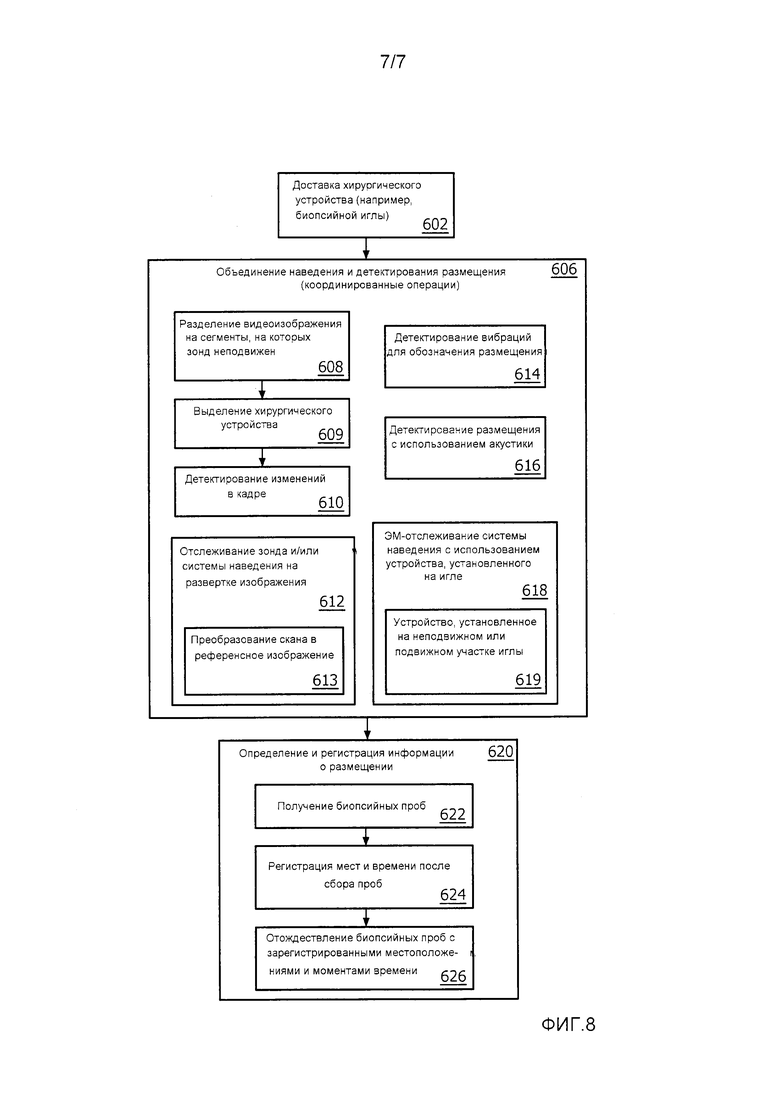
на Фиг. 8 показана блок-схема алгоритма для наведения хирургического инструмента и детектирования размещения согласно настоящим принципам.
Согласно настоящим принципам раскрыты системы и способы для детектирования размещения хирургического инструмента в ходе проведения хирургических процедур. В одном варианте осуществления хирургический инструмент может включать в себя биопсийную иглу. Хирургические процедуры могут быть интегрированы в навигационную систему, работающую под контролем изображения, для отслеживания мест биопсии. Система и способ отслеживают число, время и место проведенных биопсий с использованием навигационной системы. В одном варианте осуществления положение размещения иглы регистрируется автоматически в ходе взятия биопсии под контролем изображения, например время «выстрела» и местоположение иглы могут автоматически регистрироваться для биопсийного пистолета, производящего выстрел в ходе процедуры взятия биопсии. Обеспечиваются способы детектирования размещения иглы, основанные на изображениях, звуке и движении. Система детектирования может быть встроена в навигационную систему для взятия биопсии под контролем изображения в качестве дополнительного элемента.
Следует понимать, что настоящее изобретение будет описано в отношении медицинских инструментов; однако идея настоящего изобретения существенно шире и может использоваться для любых инструментов, применяемых для отслеживания или анализа сложных биологических или механических систем. В частности, настоящие принципы применимы к внутренним процедурам отслеживания биологических систем, процедурам во всех областях организма, таких как легкие, желудочно-кишечный тракт, выделительные органы, кровеносные сосуды и т.д. Элементы, представленные на Фигурах, могут быть реализованы в сочетаниях аппаратного оборудования и программного обеспечения и обеспечивают функции, которые могут быть объединены в одиночном элементе или множестве элементов.
Функции различных элементов, показанные на Фигурах, могут обеспечиваться посредством использования специализированной аппаратуры, а также аппаратуры, способной осуществлять программное обеспечение в сочетании с соответствующим программным обеспечением. При выполнении процессором, эти функции могут выполняться одиночным специализированным процессором, одиночным процессором коллективного пользования или множеством отдельных процессоров, некоторые из которых могут использоваться коллективно. Кроме того, формальное использование термина «процессор» или «контроллер» не должно сводиться исключительно к аппаратному обеспечению, способному выполнять функции программного обеспечения, и может в неявном виде включать в себя без ограничений процессор для цифровой обработки сигналов («DSP»), постоянное запоминающее устройство («ROM») для хранения программного обеспечения, запоминающее устройство с произвольной выборкой («RAM»), энергонезависимый накопитель и т.д.
Помимо этого все формулировки в настоящем описании, в которых приводятся принципы, аспекты и варианты осуществления изобретения, а также его конкретные примеры, охватывают как структурные, так и функциональные эквиваленты. Кроме того, предполагается, что такие эквиваленты включают в себя как эквиваленты, известные в настоящее время, так и эквиваленты, которые будут разработаны в будущем (т.е. любые разработанные элементы, выполняющие те же функции, вне зависимости от структуры). Таким образом, например, специалистам в данной области техники ясно, что блок-схемы, приведенные в настоящем описании, представляют концептуальные виды приведенных в качестве иллюстрации компонентов систем и/или схем, воплощающих принципы изобретения. Точно также следует понимать, что любые блок-схемы алгоритма, схемы последовательностей операций и т.п. представляют различные процессы, которые могут быть по существу представлены в машиночитаемом носителе и выполняться компьютером или процессором, показан ли такой компьютер или процессор в явном виде или нет.
Кроме того, варианты осуществления настоящего изобретения могут принимать вид компьютерного программного продукта, доступного на пригодном для компьютера и машиночитаемом носителе, обеспечивающем программный код для использования компьютером или любой системой выполнения инструкций, или связанный с ними. В целях настоящего описания пригодный для компьютера и машиночитаемый носитель может представлять собой любое устройство, которое может включать в себя, хранить, сообщать, распространять или транспортировать программу для использования системой выполнения инструкций, аппаратурой или устройством, или связанную с ними. Носитель информации может представлять собой электронный, магнитный, оптический, электромагнитный, инфракрасный носитель либо полупроводниковую систему (аппаратуру, устройство), либо среду распространения. В число примеров машиночитаемых носителей входят запоминающее устройство на полупроводниках или твердотельных элементах, магнитная лента, съемная компьютерная дискета, запоминающее устройство с произвольной выборкой (RAM), постоянное запоминающее устройство (ROM), жесткий магнитный диск и оптический диск. В число известных примеров оптических дисков входят компакт-диск - постоянное запоминающее устройство (CD-ROM), компакт-диск с функцией чтения/записи (CD-R/W), а также DVD.
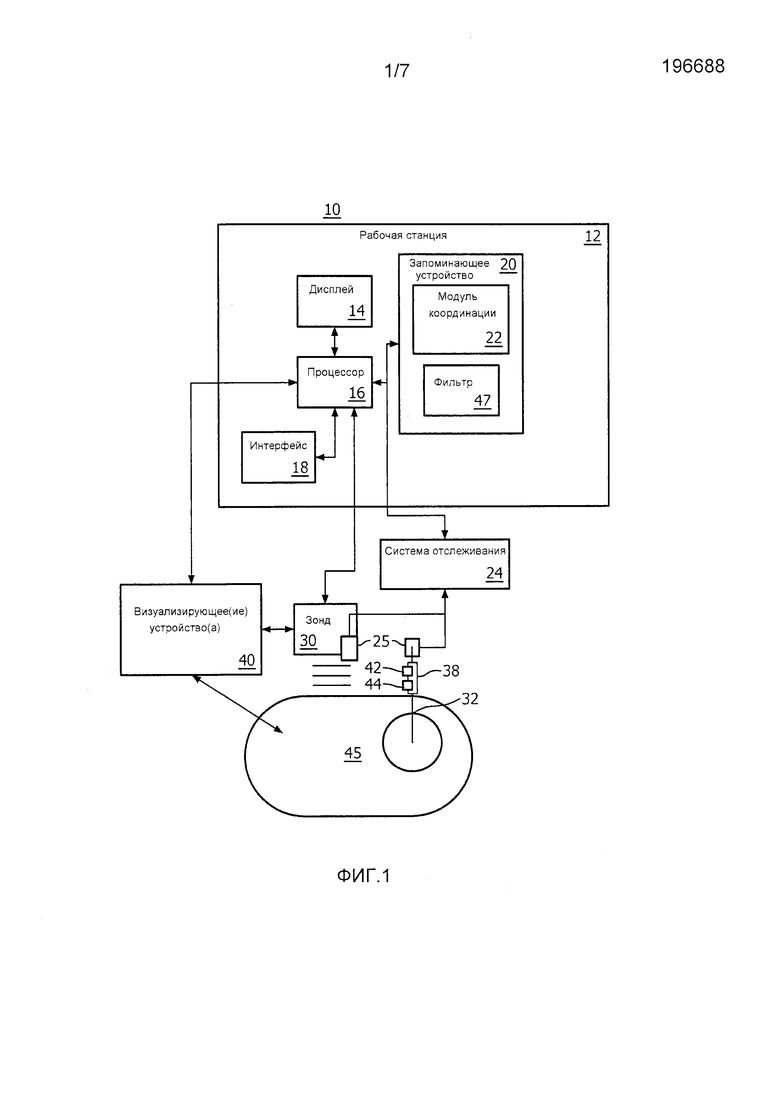
Обратимся к чертежам, на которых одинаковые позиции представляют одинаковые или схожие элементы, где на Фиг. 1 показана система 10 для объединения наведения иглы для биопсии с детектированием и регистрацией размещения иглы, выполняемыми автоматически, согласно одному варианту осуществления. Система 10 может применяться при проведении различных медицинских процедур, например взятии биопсии под контролем изображения. В частности, система 10 может способствовать автоматическому документированию числа, времени и места проведенных биопсий, выполненных с использованием навигационных систем, работающих под контролем изображения, на пациенте 45. Система 10 включает в себя рабочую станцию 12, обеспечивающую планирование, навигацию и передачу информации по каналу обратной связи пользователю посредством, например, дисплея 14. Рабочая станция 12 может включать в себя компьютерный процессор 16, дисплей 14, пользовательский интерфейс 18 (например, мышь, клавиатуру и т.д.), а также запоминающее устройство 20 для хранения информации и программного обеспечения.
Запоминающее устройство 20 содержит программное обеспечение и может включать в себя блок 22 координации, выполненный с возможностью координирования визуальной информации, акустической информации или информации о вибрациях, данные пространственного отслеживания и т.д. с движением медицинского инструмента и событиями, связанными с лечением субъекта. В одном варианте осуществления параллельно отслеживается положение ультразвукового зонда 30 и биопсийной иглы 32. Положения для взятия биопсии определяются с использованием контроля по изображению и регистрируются со ссылкой на медицинское изображение или медицинские изображения. В другом варианте осуществления могут применяться система 24 пространственного отслеживания или отслеживающее устройство 25 для определения положения зонда относительно медицинского изображения. Например, на зонд 30 может быть помещен электромагнитный (ЭМ) датчик отслеживания с шестью степенями свободы, используемый в качестве отслеживающего устройства 25. Модуль 22 осуществляет сбор данных, указывающих положение системы 38 наведения размещения (такой как направитель иглы, биопсийный пистолет или другое устройство), иглы 32 или любого другого инструмента.
Система 38 наведения размещения выполнена с возможностью обеспечения детектирования движения и/или срабатывания инструмента 32 (например, забора пробы). Модуль 22 координирует объединение автоматического детектирования размещения инструмента, определения положения и регистрации, используя инструменты и инструментальные системы согласно настоящим принципам. Детектирование может осуществляться по изображениям, например изображениям при трансректальном ультразвуковом исследовании/потоку видеоданных, собранных из визуализирующего устройства 40. В одном варианте осуществления применяется фильтр 47, способствующий отслеживанию инструмента 32 вместе с изображением субъекта 45. В других вариантах осуществления детектирование может осуществляться с помощью акустического детектора 42 или с помощью детектора 44 вибраций, и/или на основе данных пространственного отслеживания, полученных из отслеживающего устройства 25, например, от отслеживаемой биопсийной иглы и/или зонда 30. Используя одно или более из этих устройств, можно определить, по меньшей мере, время и место совершения событий (забора биопсийной пробы) в организме субъекта. Детектирование операций размещения инструмента 32 может соотноситься с референсной системой координат, так что могут регистрироваться время и место, например забора биопсийной пробы, для последующих ссылок.
В одном варианте осуществления представляется весьма полезным определить фактические места взятия биопсии в ходе процедуры, а затем нанести фактические места взятия биопсии на референсное изображение, например магнитно-резонансные (МР) изображения. Мишени, идентифицированные на изображениях, полученных многопараметрической магнитно-резонансной визуализацией, далее могут корректно сопоставляться с результатами анализа на патологию.
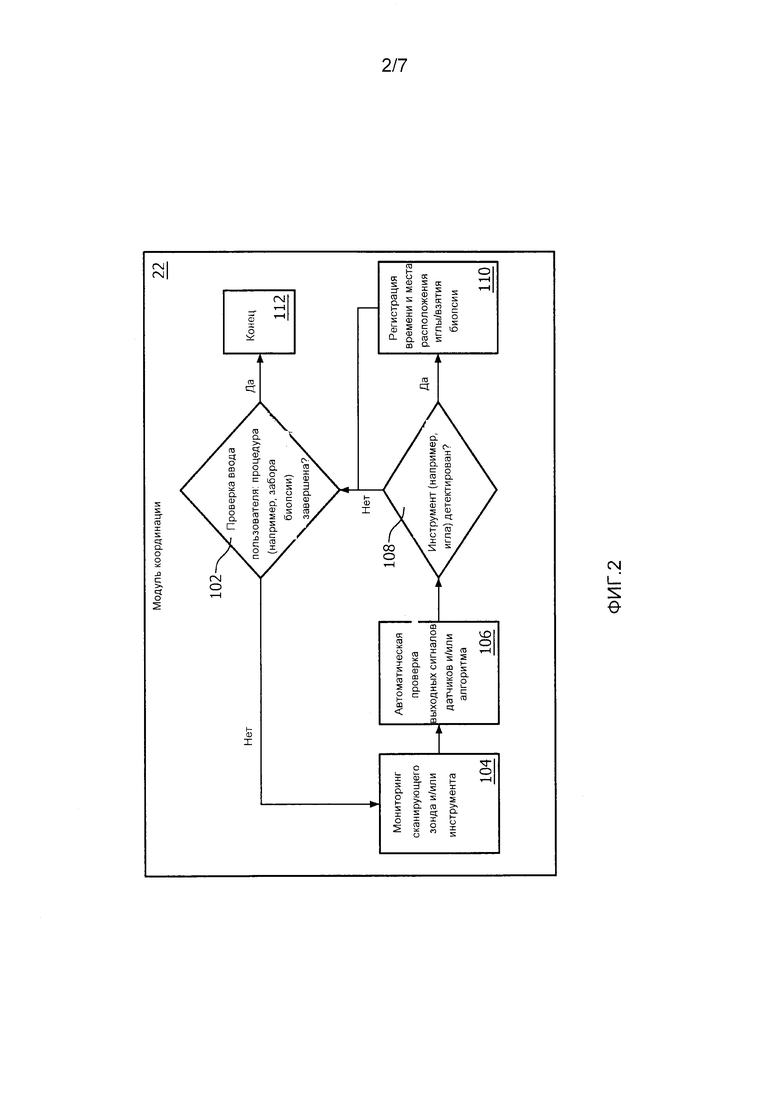
На Фиг. 2 показана блок-диаграмма/блок-схема алгоритма, представляющая последовательность выполняемых действий модуля 22 координации в ходе проведения биопсии под контролем изображения согласно одному иллюстративному варианту осуществления. В блоке 102 принимается решение, завершена ли процедура взятия биопсии. Работа модуля 22 координации начинается с работы блока 102. Если процедура завершена, программа завершает свою работу в блоке 112. Если процедура не завершена, работа программы переходит к блоку 104. В блоке 104 выполняется управление биопсией при детектировании размещения иглы. Это может включать в себя выполнение процедуры биопсии при мониторинге сканирующего зонда устройства, такого как, например, трансректальный ультразвуковой (ТРУЗИ) зонд, и/или мониторинге местоположения биопсийной иглы. В блоке 106 непрерывно контролируются выходные сигналы датчиков и/или алгоритма для определения появления сигнала размещения биопсийной иглы. Если в блоке 108 размещение детектировано, в блоке 110 регистрируются местоположения зонда и/или биопсийной иглы вместе со временем размещения. Мониторинг размещения продолжается до конца процедуры биопсии в блоке 112. Модуль 22 координации может обеспечивать и другие способы размещения иглы. Примеры таких способов описаны ниже.
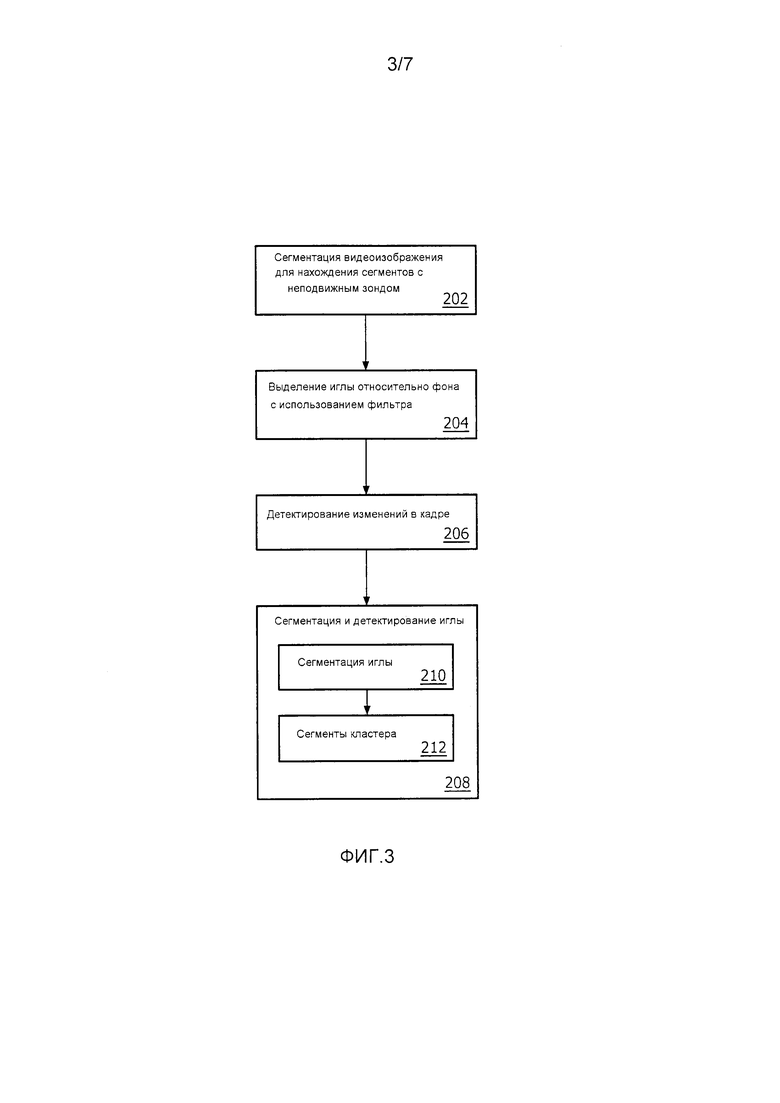
Как показано на Фиг. 3, детектирование размещения иглы на основе изображения выявляет размещение биопсийной иглы путем объединения информации от многих источников, полученной на основе, например, стабильности ультразвукового зонда, фоновой видеомодели ТРУЗИ, а также предшествующей информации об ориентации и положении иглы. В блоке 202 используется информация об ЭМ-отслеживании от ультразвукового датчика-зонда для разделения видеоизображения на секции, в которых ультразвуковой зонд представляется неподвижным. В блоке 204 игла выделяется с использованием фильтра, специально выполненного с возможностью реагирования на биопсийную иглу внутри изображения. В блоке 206 детектируются изменения в кадре в отношении фоновой модели, сохраняемой в каждом видеосегменте. Путем объединения этих этапов присутствие биопсийной иглы может детектироваться в блоке 208. Далее приводятся подробности каждого этапа.
В блоке 202 сегменты ТРУЗИ-видеоизображений основаны на стабильности зонда. Слежение за размещением иглы основано на том, что урологи сначала стабилизируют ультразвуковой зонд, а затем размещают иглу для забора пробы, например, из предстательной железы или другого органа, или иной ткани. При проведении такого исследования поиск размещения иглы сужается до тех частей последовательности видеоизображений, где ультразвуковой зонд неподвижен.
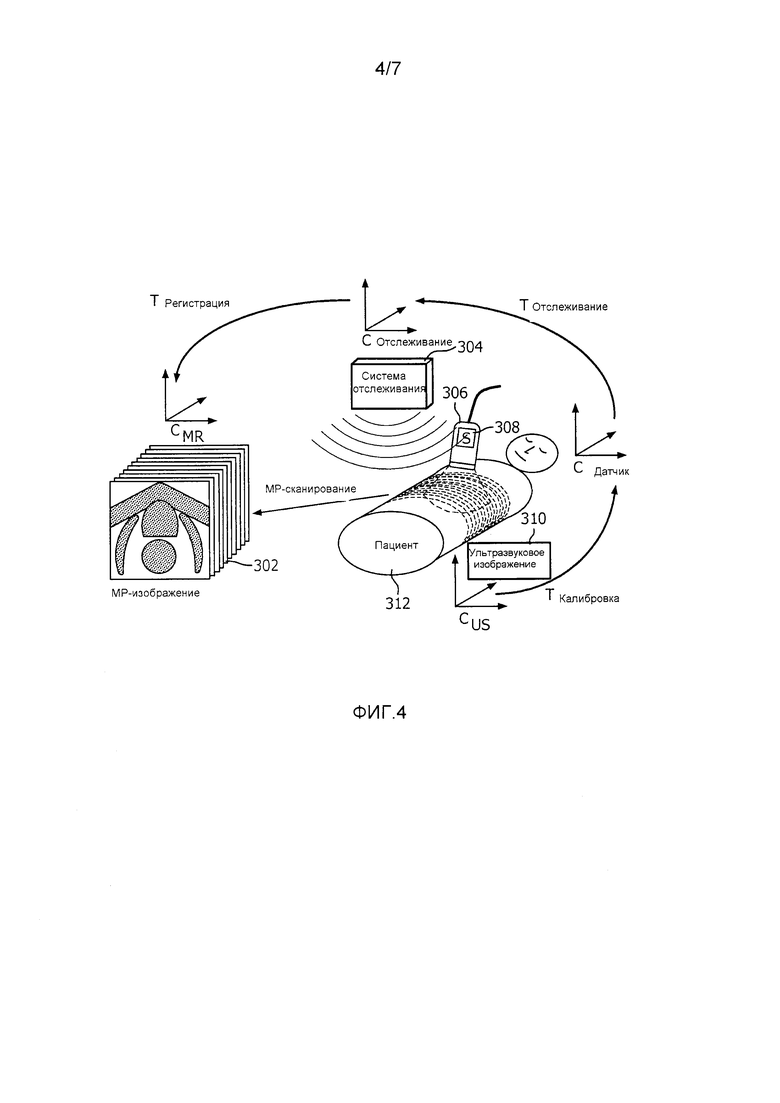
На Фиг. 4 иллюстративно представлена последовательность преобразований для слияния ТРУЗИ-изображения 310, полученного в режиме реального времени, и полученного ранее МР-изображения 302. Ультразвуковое изображение 310, полученное на пациенте 312, содержит координатную систему Cus. Датчик 308 отслеживания, прикрепленный к ультразвуковому зонду 306, имеет свою собственную координатную систему Csensor. Система 304 отслеживания содержит свою собственную координатную систему Ctracking. МР-изображение 302, полученное при МР-сканировании пациента 312, содержит свою собственную координатную систему CMR. Эти координатные системы могут быть преобразованы в референсную координатную систему (например, CMR), используя систему преобразований. Эти преобразования включают в себя, например, Tcalibration, Ttracking и Tregistration. Используя данные преобразования, трехмерные (3D) внешние координаты пикселей можно представить в 2D-видеокадре (310) ТРУЗИ. Путем сравнения 3D-координат того же набора пикселей в последовательности кадров можно определить движение УЗИ-зонда 306. При использовании настоящего подхода на плоскости (310) изображения выбирают N точек. Далее внешние координаты этих точек находят посредством ЭМ-отслеживания зонда 306. Для каждой точки рассчитывают угловое расстояние между 3D-внешней координатой этой точки и ее 3D-внешней координатой на предшествующем кадре. Если ни одна из этих точек N не совершила значительного перемещения, кадр рассматривается в качестве «неподвижного», при этом данный кадр, таким образом, претендует на дальнейшую обработку.
Как опять же показано на Фиг. 3, в блоке 202 осуществляется выделение иглы. Когда идентифицированы ТРУЗИ-кадры (310), полученные, когда датчик УЗИ находится в стабильном положении, осуществляется детектирование и сегментация иглы на этих кадрах, если это возможно. Изображение может быть сначала свернуто с помощью фильтра перед обработкой. Специальная конструкция фильтра может способствовать использованию трубчатой структуры иглы, а не просто подавлять помехи на изображении. В одном варианте осуществления может применяться Фильтр Гаусса по второй производной (2nd derivative Gaussian filter). На Фигуре 5 показаны два иллюстративных вида в перспективе Фильтра 402 Гаусса по второй производной. Фильтр 402 Гаусса по второй производной использует цилиндрическую форму иглы, чтобы способствовать выделению иглы на ультразвуковом изображении.
В блоке 206 выполняется фоновое моделирование для детектирования изменений. После фильтрации УЗИ-изображений с использованием фильтра для детектирования иглы размещение иглы детектируется путем нахождения внезапного изменения внешнего вида кадра. Когда ультразвуковой зонд находится в стабильном состоянии, единственное изменение, происходящее в кадре, представляет собой размещение иглы, поскольку дыхательными движениями можно пренебречь. Для детектирования этого существенного изменения может использоваться гистограмма отклика фильтра, которая также инварианта при малых дыхательных движениях.
В блоке 208 выполняется сегментация иглы. Детектирование изменений, описанное в блоке 206, может не только пометить кадры, содержащие размещение иглы, но может также пометить ложноположительные кадры, на которых изображение иглы отсутствует. Для исключения ложноположительных данных иглу можно разделить на сегменты внутри изображения для подтверждения ее присутствия. В блоке 210 изображение сегментируется с выделением фрагментов иглы и фона, используя отклик фильтра. Для сегментации могут использоваться разрезы графа, однако при этом более одного сегмента может выдаваться в качестве иглы. В блоке 212 эти сегменты объединяются в кластеры на основе предшествующей информации о положении и ориентации направителя иглы. Объединение в кластеры фрагментов, образующих трубчатую структуру, является предпочтительным. Для этой цели могут также использоваться разрезы графа.
После разделение иглы на сегменты многие ложноположительные данные могут быть устранены на основе формы, ориентации и положения относительно направителя иглы. Данный подход помогает надежно исключить подавляющее большинство кадров, на которых размещение иглы отсутствует. Далее может детектироваться сработавшая игла.
Заметим, что при детектировании местоположения иглы согласно Фиг. 3 используется пространственное отслеживание ультразвукового зонда или направителя биопсийного инструмента, применяемых для взятия биопсии. Пространственное отслеживание самой биопсийной иглы (с использованием дополнительно датчика отслеживания) не требуется. Однако если данный способ используется в качестве единственного способа детектирования размещения, регистрация самого кончика биопсийной иглы или местоположения фокуса биопсии (т.е. глубины введения иглы вдоль траектории иглы) может оказаться недоступной.
Как показано на Фиг. 6, в другом варианте осуществления обеспечивается детектирование размещения иглы на основе движения. После выстрела биопсийного пистолета 48 ультразвуковой зонд 52, используемый для наведения иглы 54, испытывает некоторое движение и вибрацию. В данном способе детектирования размещения, например, на ультразвуковом изображении 56, эти вибрация и внезапное движение применяются путем закрепления детектора 44 вибрации/движения на биопсийном пистолете 48 и непрерывного мониторинга сигнала от датчика 44 вибрации/движения. Данный способ прост и легок в применении, а также позволяет регистрировать временные параметры размещения иглы. В сочетании с пространственным отслеживанием (25) зонда 52 ТРУЗИ (или направителя иглы) этот способ также позволяет регистрировать местоположение траектории размещения биопсийной иглы, например в органе 50, во время проведения биопсии. Способ детектирования размещения согласно Фиг. 6 может не позволить регистрировать сам кончик биопсийной иглы или местоположение фокуса биопсии (т.е. глубину введения иглы вдоль траектории иглы).
В других вариантах осуществления могут использоваться комбинированные способы детектирования. Например, комбинированные способы могут включать в себя использование вибраций, акустических данных и изображений вместе, либо могут включать в себя другие комбинации. Описанные варианты осуществления могут объединяться между собой различными способами для достижения устойчивого и надежного детектирования размещения иглы. Это может повысить рабочие характеристики детектирования по сравнению с использованием какого-либо одного способа или одной технологии. Координация множества способов может также позволить более точно отслеживать и регистрировать число и время размещений, а также фактические местоположения биопсийной иглы.
В другом варианте осуществления применяется детектирование размещения с помощью пространственного отслеживания биопсийной иглы. Описанное пространственное отслеживание может применяться в качестве независимого способа или может использоваться в сочетании с любыми другими описанными способами.
Как показано на Фиг. 7, размещение иглы может детектироваться автоматически, при этом местоположение фокуса 510 биопсии может определяться путем пространственного отслеживания биопсийной иглы 502. С этой целью на биопсийном пистолете 506 предусмотрены датчик отслеживания или датчики 504 и 505, которые могут крепиться либо к «неподвижной» (505), либо «подвижной» (504) референсной точке биопсийной иглы 502. Неподвижная референсная точка не перемещается относительно «ствола» иглы при выстреле биопсийного пистолета 506. Неподвижная референсная точка может располагаться на наружном стержне 512 иглы 502. Подвижная референсная точка перемещается вперед вдоль оси иглы с помощью механизма размещения иглы, когда биопсийный пистолет 506 производит выстрел. Подвижная референсная точка может располагаться на внутреннем стилете 514 иглы 502.
Датчики 505 отслеживания на неподвижной референсной точке легче/дешевле изготавливать, однако пространственное отслеживание положения с помощью «неподвижного» датчика 505 непосредственно не отражает движение кончика иглы в процессе размещения. Следовательно, для детектирования размещения данный датчик 505 предпочтительно применяется в сочетании с описанными способами, представленными, например, на Фиг. 3, 4, 5, 6 и др. В частности, сигнал с датчика 504 отслеживания может использоваться в качестве рабочего сигнала датчика (44) вибрации/движения. Датчики 504 отслеживания на «подвижной» точке иглы 502 могут использоваться для непосредственного детектирования размещения иглы 502 (датчик 504 быстро перемещается на фиксированное расстояние вдоль оси иглы), а также для регистрации ее местоположения.
На Фиг. 8 описан способ детектирования медицинского устройства согласно одному варианту осуществления. В блоке 602 хирургическое устройство доставляется в организм субъекта с использованием системы наведения. Хирургическое устройство может включать в себя биопсийную иглу.
В блоке 606 наведение хирургического устройства объединяется с автоматическим детектированием и автоматической регистрацией размещения для детектирования события размещения хирургического устройства с помощью одного или нескольких из следующих средств: изображения в режиме реального времени, акустического индикатора, детектора вибраций и устройства для пространственного отслеживания. Размещение может означать введение устройства в организм субъекта или, что более предпочтительно, срабатывание устройства для забора биопсийной пробы и т.п. Предпочтительно детектируемое событие представляет собой событие срабатывания для взятия биопсийной пробы, так что положение и время забора биопсийной пробы определяются системой более точно.
Детектирование размещения хирургического устройства с помощью изображения в режиме реального времени может включать в себя разделение видеоизображения на секции, в которых ультразвуковой зонд неподвижен, выполняемое в блоке 608; выделение хирургического устройства в секциях видеоизображения с использованием фильтра, выполняемое в блоке 609; а также детектирование изменений в кадре относительно фоновой модели, которая сохраняется на всех сегментах видеоизображения для определения присутствия биопсийной иглы, выполняемое в блоке 610.
В блоке 612 выполняется ультразвуковое сканирование изображения, полученного в реальном времени, так что, по меньшей мере, зонд для ультразвукового сканирования или система наведения занимают положение, отслеживаемое системой отслеживания. В блоке 613 изображение, полученное в режиме реального времени, может преобразовываться в референсное медицинское изображение.
В блоке 614 детектирование размещения хирургического устройства с помощью детектора вибраций включает в себя детектирование вибраций в хирургическом устройстве для обозначения размещения. В блоке 616 детектирование размещения хирургического устройства с помощью акустического индикатора включает в себя акустическую индикацию положения системы наведения (например, звуковой сигнал возрастает с глубиной проникновения иглы или при срабатывании иглы).
В блоке 618 детектирование размещения хирургического устройства с помощью устройства для пространственного отслеживания включает в себя электромагнитное отслеживание положения системы наведения с использованием устройства пространственного отслеживания, установленного на биопсийной игле. В блоке 619 отслеживание положения системы наведения с использованием устройства пространственного отслеживания, установленного на биопсийной игле, включает в себя использование неподвижного или подвижного устройства пространственного отслеживания. Следует понимать, что один или более способов детектирования, реализуемых в блоке 606, могут применяться совместно в сочетании друг с другом.
В блоке 620 место и время каждого размещения определяются и регистрируются на основе наведения хирургического устройства и автоматического детектирования размещения. В блоке 622 определение и регистрация включают в себя получение биопсийных проб, а также регистрацию числа биопсий, места и времени каждой биопсии. В блоке 624 система наведения и автоматическое детектирование размещения координируются для регистрации числа размещений, места каждого размещения, а также времени каждого размещения, после того как размещение детектировано. В блоке 626 биопсийные пробы могут отождествляться (соотносится) с зарегистрированными местоположениями и моментами времени.
При толковании прилагаемой формулы изобретения следует понимать, что:
a) термин «содержащий» не исключает наличия других элементов или действий помимо тех, что приведены в данном пункте формулы изобретения;
b) указание элемента в единственном числе не исключает присутствия множества таких элементов;
c) любой номер позиции в формуле изобретения не ограничивает объема ее притязаний;
d) несколько «средств» могут быть представлены одной структурой или функцией, реализованной одним элементом, аппаратным обеспечением или программным обеспечением; а также
e) предполагается, что никакой специальной последовательности действий не требуется, если она не указана особо.
Представив описание предпочтительных вариантов осуществления систем и способов детектирования расположения иглы при биопсии под контролем изображения (которые являются иллюстративными, но не ограничивающими), следует отметить, что специалистами в данной области техники могут быть предложены модификации и изменения в свете представленных идей. Таким образом, следует понимать, что в конкретные варианты осуществления могут быть внесены изменения, которые не выходят за пределы объема изобретения, определяемого прилагаемой формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Комбинированная интраоперационная навигационная система с использованием генерации ультразвуковых изображений методом трассировки лучей | 2022 |
|
RU2816071C1 |
| СИСТЕМА КОНТРОЛЯ ИЗОБРАЖЕНИЙ | 2016 |
|
RU2703688C2 |
| Способ робот-ассистированной биопсии предстательной железы с предварительным ультразвуковым сканированием | 2023 |
|
RU2827129C1 |
| ИНТЕРВЕНЦИОННАЯ НАВИГАЦИЯ С ИСПОЛЬЗОВАНИЕМ ТРЕХМЕРНОГО УЛЬТРАЗВУКА С КОНТРАСТНЫМ УСИЛЕНИЕМ | 2008 |
|
RU2494676C2 |
| СИСТЕМА И СПОСОБ ИНТЕГРИРОВАННОЙ БИОПСИИ И ЛЕЧЕНИЯ | 2010 |
|
RU2558521C2 |
| УСТРОЙСТВО ДЛЯ ПРОВЕДЕНИЯ МАЛОТРАВМАТИЧНОЙ ОПТИЧЕСКОЙ БИОПСИИ | 2021 |
|
RU2804292C1 |
| ТРЕХМЕРНОЕ УЛЬТРАЗВУКОВОЕ УПРАВЛЕНИЕ ХИРУРГИЧЕСКИМИ ИНСТРУМЕНТАМИ | 2011 |
|
RU2598048C2 |
| СИСТЕМА И СПОСОБ ДЛЯ ОТСЛЕЖИВАНИЯ ПРОНИКАЮЩЕГО ИНСТРУМЕНТА | 2014 |
|
RU2688316C1 |
| Способ интраоперационной координации во время проведения промежностной биопсии предстательной железы и комплект для его осуществления | 2021 |
|
RU2776980C1 |
| ГИБКИЙ КАБЕЛЬ СО ВСТРОЕННЫМИ ДАТЧИКАМИ ДЛЯ ДИНАМИЧЕСКОГО ОТСЛЕЖИВАНИЯ ИНСТРУМЕНТА | 2011 |
|
RU2597136C2 |
Группа изобретений относится к медицинской технике, а именно к средствам визуализации хирургических процедур. Система для детектирования медицинского устройства содержит систему наведения, выполненную с возможностью доставки хирургического устройства в организм субъекта, детектор размещения хирургического устройства, выполненный с возможностью взаимодействия с системой наведения и детектирования размещения хирургического устройства в организме субъекта и модуль координации для приема входного сигнала доставки хирургического устройства для координации множества входных сигналов с целью определения и регистрации одного или более из места и времени каждого размещения. Биопсийная система для детектирования медицинского устройства содержит систему наведения для доставки биопсийной иглы в организм субъекта, детектор размещения биопсийной иглы и сканирующего зонда для визуализации биопсийной иглы, устройство визуализации размещения, и модуль координации для приема входного сигнала, касающегося доставки хирургического устройства, от одного или более из системы наведения, детектора размещения и сканирующего зонда для координации множества входных сигналов с целью регистрации каждого размещения для создания учетной записи места и времени проведения биопсии, связанных с каждым размещением. Способ детектирования медицинского устройства содержит этапы, на которых доставляют хирургическое устройство в организм субъекта с использованием системы наведения, объединяют наведение хирургического устройства с автоматическим детектированием и автоматической регистрацией размещения для детектирования события размещения хирургического устройства с помощью одного или более из изображения в режиме реального времени, акустического индикатора, детектора вибраций и устройства пространственного отслеживания, и определяют и регистрируют одно или более из места и времени каждого размещения путем координации множества входных сигналов, касающихся доставки хирургического устройства, в том числе наведения хирургического устройства и автоматического детектирования размещения. Использование изобретений позволяет повысить точность определения мест забора биопсийных проб. 3 н. и 12 з.п. ф-лы, 8 ил.
1. Система для детектирования медицинского устройства, содержащая:
систему (38) наведения, выполненную с возможностью доставки хирургического устройства (32) в организм субъекта;
детектор (24, 25, 42, 44, 40) размещения хирургического устройства, выполненный с возможностью взаимодействия с системой наведения и с возможностью детектирования размещения хирургического устройства в организме субъекта; и
модуль (22) координации, выполненный с возможностью приема входного сигнала, касающегося доставки хирургического устройства, от системы наведения и детектора размещения для координации множества входных сигналов с целью определения и регистрации одного или более из места и времени каждого размещения.
2. Система по п. 1, дополнительно содержащая фильтр (47), выполненный с возможностью выделения хирургического устройства на ультразвуковой развертке изображения.
3. Система по п. 1, в которой детектор (38) размещения хирургического устройства включает в себя детектор (44) вибраций, установленный на системе наведения.
4. Система по п. 1, в которой детектор (38) размещения хирургического устройства включает в себя акустический детектор (42), выполненный с возможностью указания положения системы наведения акустическим способом.
5. Система по п. 1, в которой детектор (38) размещения хирургического устройства включает в себя систему (24, 25) пространственного отслеживания, при этом система (24, 25) пространственного отслеживания включает в себя устройство пространственного отслеживания, установленное на биопсийной игле (502), включающей в себя неподвижное (505) или подвижное устройство (504) пространственного отслеживания.
6. Биопсийная система для детектирования медицинского устройства, содержащая:
систему (38) наведения, выполненную с возможностью доставки биопсийной иглы (32) в организм субъекта;
детектор (24, 25, 42, 44) размещения, выполненный с возможностью детектирования размещения биопсийной иглы и сканирующего зонда (30), применяемого для визуализации биопсийной иглы;
устройство (40) визуализации, выполненное с возможностью визуализации размещения; и
модуль (22) координации, выполненный с возможностью приема входного сигнала, касающегося доставки хирургического устройства, от одного или более из системы наведения, детектора размещения и сканирующего зонда для координации множества входных сигналов с целью регистрации каждого размещения для создания учетной записи места и времени проведения биопсии, связанных с каждым размещением.
7. Система по п. 6, дополнительно содержащая фильтр (47), выполненный с возможностью выделения биопсийной иглы на ультразвуковой развертке изображения.
8. Система по п. 6, в которой детектор (38) размещения включает в себя детектор (44) вибраций, установленный на системе наведения.
9. Система по п. 6, в которой детектор (38) размещения включает в себя акустический детектор (42), выполненный с возможностью указания положения системы наведения акустическим способом.
10. Система по п. 6, в которой детектор (38) размещения включает в себя систему (24, 25) пространственного отслеживания, при этом система (24, 25) пространственного отслеживания включает в себя устройство пространственного отслеживания, установленное на биопсийной игле, включающей в себя неподвижное (505) или подвижное устройство (504) пространственного отслеживания.
11. Способ детектирования медицинского устройства, содержащий этапы, на которых:
доставляют (602) хирургическое устройство в организм субъекта с использованием системы наведения;
объединяют (606) наведение хирургического устройства с автоматическим детектированием и автоматической регистрацией размещения для детектирования события размещения хирургического устройства с помощью одного или более из изображения в режиме реального времени, акустического индикатора, детектора вибраций и устройства пространственного отслеживания; и
определяют и регистрируют (620) одно или более из места и времени каждого размещения путем координации множества входных сигналов, касающихся доставки хирургического устройства, в том числе наведения хирургического устройства и автоматического детектирования размещения.
12. Способ по п. 11, в котором детектирование размещения хирургического устройства с помощью детектора вибраций включает в себя детектирование (614) вибраций в хирургическом устройстве для обозначения размещения.
13. Способ по п. 11, в котором детектирование размещения хирургического устройства с помощью акустического индикатора включает в себя указание (616) положения системы наведения акустическим способом.
14. Способ по п. 11, в котором детектирование размещения хирургического устройства с помощью устройства пространственного отслеживания включает в себя электромагнитное отслеживание (618) положения системы наведения с использованием устройства пространственного отслеживания, установленного на биопсийной игле, при этом устройство пространственного отслеживания включает в себя неподвижное или подвижное устройство пространственного отслеживания.
15. Способ по п. 11, в котором этап детектирования размещения хирургического устройства с помощью изображения в режиме реального времени включает в себя этапы, на которых:
разделяют (608) видеоизображение на секции, в которых ультразвуковой зонд неподвижен;
выделяют (609) хирургическое устройство в секциях видеоизображения с использованием фильтра; и
детектируют (610) изменения в кадре относительно фоновой модели, сохраняемой на всех сегментах видеоизображения для определения присутствия биопсийной иглы.
| US 2003135115 A1, 17.07.2013 | |||
| US 6246898 B1, 12.06.2001 | |||
| EP 1864624 A1, 12.12.2007 | |||
| US 6546279 B1, 08.04.2003 | |||
| СПОСОБ ЦВЕТНОГО ДОПЛЕРОГРАФИЧЕСКОГО ИССЛЕДОВАНИЯ ПРЕДСТАТЕЛЬНОЙ ЖЕЛЕЗЫ | 1999 |
|
RU2146106C1 |
| СПОСОБ РАДИКАЛЬНОГО ХИРУРГИЧЕСКОГО ЛЕЧЕНИЯ ЛОКАЛИЗОВАННОГО РАКА ПРЕДСТАТЕЛЬНОЙ ЖЕЛЕЗЫ | 2006 |
|
RU2305505C1 |

