УРОВЕНЬ ТЕХНИКИ
ОБЛАСТЬ ИЗОБРЕТЕНИЯ
Данное раскрытие относится к системам и способам наведения медицинских инструментов, а более конкретно, к наведению игл с использованием интеллектуальных игл и изображений, сливаемых с возможностью предоставлять большую визуализацию наведения игл.
ОПИСАНИЕ УРОВНЯ ТЕХНИКИ
В прошлом десятилетии наблюдалось увеличение использования ультразвука при эпидуральных вмешательствах с такими прогнозами, что скоро он должен стать частью стандарта клинического лечения. Тем не менее, одна задача для наводимой по ультразвуку эпидуральной анестезии заключается в том, чтобы игла не пересекала позвоночник. Врачи главным образом полагаются на потерю сопротивления, чтобы определять это прохождение, очень субъективное действие, возможно приводящее к осложнениям. Связанная с позвоночником боль представляет собой частую причину заболеваемости. Боль в спине вместе с существенными медицинскими затратами на диагностику и лечение приводит к нагрузке и потерям производительности. Эпидуральная инъекция представляет собой один из множества способов, рассматриваемых для облегчения боли, наряду с физиотерапией, пероральными препаратами и хирургией, если пациент не поддается консервативному лечению. Эпидуральная инъекция доставляется в эпидуральное пространство позвоночника, чтобы обеспечить временное или длительное освобождение от боли или воспаления.
Три слоя ткани охватывают спинной мозг. Эпидуральное пространство представляет собой область пространства между крайним внешним слоем тканей (твердой мозговой оболочкой) спинного мозга и внутренней поверхностью кости и поддерживающими связками, в которых он содержится. Эпидуральное пространство идет по всей длине позвоночника. Эпидуральное пространство содержит жировые ткани вместе с кровеносными сосудами и нервными корешками. Эпидуральная инъекция может быть выполнена, чтобы облегчить боль, вызываемую грыжевым или выдавленным диском, спинальным стенозом, послеоперационными хирургическими синдромами «неудачного восстановления» (хроническая боль в спине или ноге после спинномозговой хирургии), или другими повреждениями спинномозговых нервов, позвоночника и окружающих тканей.
Эпидуральная анестезия также прописывается для родов и для множества хирургических процедур. Осложнения при применении эпидуральной анестезии возникают вследствие некорректного позиционирования иглы во время инъекции, но редко служат причиной необратимого повреждения пациента. Тем не менее, осложнения могут быть достаточно дезориентирующими и могут сохраняться в течение нескольких дней. В ходе эпидуральной анестезии размещение иглы является важным для того, чтобы эффективно справляться с освобождением от боли и не допускать повреждения нервов. Тем не менее, точный ввод эпидуральной иглы является сложным при обучении и типично основывается на опыте анестезиолога, чтобы обнаруживать потерю сопротивления на поршне иглы для определения размещения.
Портативное ультразвуковое исследование все в большей степени используется для того, чтобы помогать в позиционировании иглы для эпидуральных и других инъекций или спинномозговых пункций и других биопсий, в частности, при наличии сложных анатомий (высокого индекса массы тела (BMI), сколиоза и т.д.). Тем не менее, ультразвуковое исследование не визуализирует наконечник иглы оптимальным образом, особенно для процедур, в которых ввод иглы является очень резким. Кроме того, ткани (например, желтые связки) могут быть трудными для наблюдения даже при ультразвуковом наведении вследствие сложного окружения для ультразвука (например, наличия костей).
Визуализация иглы, к примеру, продемонстрировано электромагнитное отслеживание, чтобы выделять наконечник иглы на ультразвуковом изображении, и доступно оборудование для наведения анестезии и биопсии. Тем не менее, существенный расход таких игл и очень большое время настройки снижает адаптацию этой технологии. Другие способы улучшения визуализации иглы включают в себя добавление еще одной модальности визуализации в поток обработки, такой как рентгеновские лучи или даже компьютерная томография (КТ), но это делает процедуру значительно более трудоемкой.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В соответствии с принципами настоящего раскрытия система для отслеживания проникающего инструмента включает в себя матрицу интраоперационных измерительных преобразователей, выполненную с возможностью генерировать сигналы из множества положений в матрице, чтобы генерировать одно или более изображений исследуемой области в реальном времени. Проникающий инструмент имеет тело с датчиком, установленным в исследуемом положении на упомянутом теле. Датчик реагирует на сигналы из упомянутого множества положений в матрице. Модуль обработки сигналов выполнен с возможностью определять положение и ориентацию проникающего инструмента в соответствии с сигналами из упомянутого множества положений в матрице. Модуль обработки сигналов дополнительно выполнен с возможностью классифицировать среду, в которой позиционировано исследуемое положение, на основе реакции датчика на сигналы из упомянутого множества положений в матрице. Модуль наложения выполнен с возможностью генерировать наложенное изображение, совмещенное с одним или более изображений в реальном времени, чтобы идентифицировать положение упомянутого исследуемого положения и предоставлять обратную связь относительно среды, в которой позиционировано упомянутое исследуемое положение. Дисплей выполнен с возможностью предоставлять визуальную обратную связь наложенного изображения на одном или более изображений в реальном времени.
Другая система для отслеживания проникающего инструмента согласно принципам настоящего раскрытия включает в себя модуль обработки сигналов, выполненный с возможностью определять положение и ориентацию проникающего инструмента в соответствии с сигналами из множества положений в матрице. Проникающий инструмент имеет ультразвуковой датчик, установленный в или около положения дистального наконечника. Модуль обработки сигналов дополнительно выполнен с возможностью классифицировать тип ткани, в которой позиционирован наконечник проникающего инструмента, на основе реакции датчика на сигналы из упомянутого множества положений в матрице.
Эта система также может включать в себя матрицу интраоперационных ультразвуковых измерительных преобразователей, выполненную с возможностью генерировать сигналы из упомянутого множества положений в матрице, чтобы предоставлять одно или более изображений исследуемой области в реальном времени. Также в систему может быть включен модуль наложения, выполненный с возможностью генерировать наложенное изображение, совмещенное с изображениями в реальном времени. Наложенное изображение может включать в себя выделенное положение проникающего инструмента и идентификатор типа ткани. Дисплей также может быть включен в состав и выполнен с возможностью предоставлять визуальную обратную связь наложенного изображения на одном или более изображений в реальном времени. Одно или более изображений в реальном времени могут включать в себя одно или более двумерных изображений. Система дополнительно может включать в себя модуль трехмерной реконструкции, выполненный с возможностью реконструировать объем трехмерного изображения исследуемой области из одного или более двумерных изображений. Помимо этого система может включать в себя модуль совмещения, выполненный с возможностью совмещать одно или более двумерных изображений в реальном времени с упомянутым объемом трехмерного изображения исследуемой области. Также возможно то, что модуль совмещения выполнен с возможностью совмещать опорное изображение с упомянутым объемом трехмерного изображения исследуемой области. Проникающий инструмент может представлять собой или включать в себя иглу. Тип ткани может быть использован в качестве указателя относительно того, когда материал должен впрыскиваться через проникающий инструмент. Проникающий инструмент может использоваться для эпидурального вмешательства.
Еще одна система для отслеживания проникающего инструмента согласно принципам настоящего раскрытия включает в себя матрицу интраоперационных ультразвуковых измерительных преобразователей, выполненную с возможностью генерировать сигналы из множества положений в матрице, чтобы предоставлять одно или более изображений исследуемой области в реальном времени. Игла имеет ультразвуковой датчик, установленным в положении дистального наконечника. Датчик реагирует на сигналы из упомянутого множества положений в матрице. Модуль обработки сигналов выполнен с возможностью определять положение и ориентацию иглы в соответствии с сигналами из упомянутого множества положений в матрице. Модуль обработки сигналов дополнительно выполнен с возможностью классифицировать тип ткани, в которой позиционирован наконечник иглы, на основе реакции датчика на сигналы из упомянутого множества положений в матрице. Модуль наложения выполнен с возможностью генерировать наложенное изображение, совмещенное с одним или более изображений в реальном времени. Наложенное изображение включает в себя выделенное положение иглы и идентификатор типа ткани. Дисплей выполнен с возможностью предоставлять визуальную обратную связь наложенного изображения на одном или более изображений в реальном времени.
Способ для отслеживания проникающего инструмента согласно настоящему раскрытию включает в себя генерацию сигналов из множества положений в матрице, чтобы генерировать одно или более изображений исследуемой области в реальном времени; предоставление проникающего инструмента, имеющего тело с датчиком, установленным в исследуемом положении на упомянутом теле, причем датчик реагирует на сигналы из упомянутого множества положений в матрице; определение положения и ориентации проникающего инструмента в соответствии с сигналами из упомянутого множества положений в матрице с использованием модуля обработки сигналов; классификацию среды, в которой позиционировано исследуемое положение, на основе реакции датчика на сигналы из упомянутого множества положений в матрице; генерацию наложенного изображения, совмещенного с одним или более изображений в реальном времени, чтобы идентифицировать положение упомянутого исследуемого положения и предоставлять обратную связь относительно среды, в которой позиционировано это исследуемое положение; и отображение наложенного изображения на одном или более изображений в реальном времени.
Эти и другие цели, признаки и преимущества настоящего раскрытия должны становиться более очевидными из нижеприведенного подробного описания иллюстративных вариантов осуществления, которые должны рассматриваться в связи с прилагаемыми чертежами.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Это раскрытие сущности подробно представляет нижеприведенное описание предпочтительных вариантов осуществления со ссылкой на следующие чертежи, на которых:
Фиг. 1 является блок-схемой, показывающей систему отслеживания проникающих инструментов в соответствии с одним вариантом осуществления;
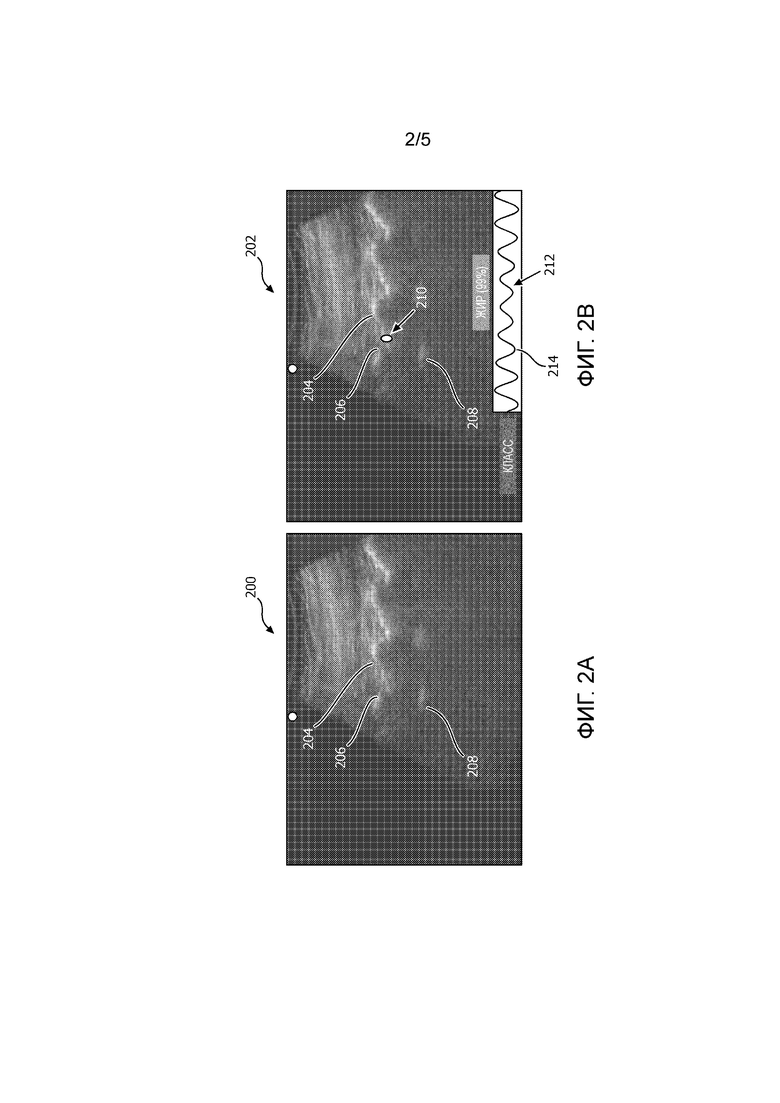
Фиг. 2A является ультразвуковым изображением, показывающим часть позвоночника с едва видимой иглой;
Фиг. 2B является ультразвуковым изображением, показывающим часть позвоночника с наконечником иглы, выделенным в соответствии с настоящими принципами;
Фиг. 3 является блок-схемой последовательности операций, показывающей способ для отслеживания проникающего инструмента в соответствии с иллюстративными вариантами осуществления;
Фиг. 4 является схемой, показывающей часть позвоночника, чтобы показывать эпидуральное пространство в качестве цели для наведения иглы в соответствии с настоящими принципами; и
Фиг. 5 является другой блок-схемой последовательности операций способа, показывающей другой способ для отслеживания проникающего инструмента в соответствии с иллюстративными вариантами осуществления.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
В соответствии с настоящими принципам, предоставляются системы и способы, которые помогают в навигации иглы или другого наводимого инструмента и улучшают исходы болезней при эпидуральных или других вмешательствах. Настоящие принципы являются чувствительными к затратам и предоставляют выгоду в этом отношении посредством использования множества недорогих модулей. Недорогие модули или инструментальные средства могут включать в себя, например, интеллектуальные иглы, которые могут быть видимыми в ультразвуковых (УЗ) изображениях, инструментальные средства планирования процедур, инструментальные средства реконструкции трехмерных объемов с использованием двумерных разверток изображений, инструментальные средства совмещения пациента с компьютерно-томографическими (КТ) изображениями, инструментальные средства совмещения статистических моделей позвоночника в трехмерном плане пациента, инструментальные средства двумерно-трехмерного совмещения в реальном масштабе времени текущего ультразвукового изображения, инструментальные средства трехмерного позиционирования иглы в реальном масштабе времени согласно плану. Варианты осуществления могут использовать один или более вышеуказанных модулей или инструментальных средств.
В одном варианте осуществления один или более ультразвуковых датчиков размещены около наконечника иглы. Датчик обеспечивает визуализацию наконечника иглы по мере того, как он принимает сигналы из визуализирующего зонда. Это помогает отслеживать текущее положение и ориентацию иглы, гарантируя то, что игла не проникает через чувствительные спинные ткани. Дополнительно, перед процедурой быстрая одномерная развертка в направлении подъема линейного зонда может использоваться для того, чтобы конструировать трехмерный объем спинальной анатомии пациента с использованием, например, способов спекл-корреляции. Этот объем затем может быть совмещен со статистической моделью (или в дооперационных КТ-изображениях) позвонков, улучшая трехмерное понимание анатомии перед вмешательством. Передаваемое в реальном масштабе времени УЗ-изображение теперь может быть совмещено на этом трехмерном плане с использованием, например, алгоритма слияния срезов и объемов. Поскольку игла теперь введена в пациента, она может отслеживаться в трехмерном режиме с использованием технологии отслеживания иглы в соответствии с настоящими принципами и визуализироваться поверх трехмерного плана. Эта система значительно уменьшает осложнения и повышает эффективность.
Процедуры с эпидуральной анестезией традиционно выполнялись относительно слепым способом. Например, анатомические ориентиры пальпировались, а инъекции в триггерные точки проводились с анестезирующим средством или с анестезирующим средством, смешанным со стероидными препаратами. Позднее, использовано наведение игл на основе изображений, которое дает возможность избирательного помещения препаратов, что дополнительно помогает в диагностике и лечении. Доступна дооперационная визуализация, к примеру, КТ, так что слияние дооперационной визуализации с интраоперационным ультразвуком может помогать в ультразвуковой интерпретации и наведении. Тем не менее, такое наведение игл на основе изображений может быть достаточно сложным, поскольку интерпретация ультразвука может быть затруднительной вследствие наличия артефактов визуализации и сложности ультразвуковых эхо-сигналов из спинальной анатомии. Настоящие принципы предлагают точную локализацию наконечника иглы на ультразвуковом изображении для пространственного наведения. Это должно улучшать результаты таких процедур и уменьшать осложнения. В целях удобства только один датчик может быть использован на игле для простого изготовления и поддержания низких затрат на иглу.
Настоящие принципы основываются на отслеживании иглы на месте, при котором ультразвуковой датчик встроен в иглу близко к наконечнику, и по мере того, как он принимает пучки из внешнего ультразвукового модуля визуализации, принимает и анализирует эти сигналы с тем, чтобы выводить точную локализацию наконечника иглы в системе отсчета, соответствующей ультразвуковому изображению.
Следует понимать, что настоящие варианты осуществления описываются с точки зрения эпидуральных инъекций в качестве примера. Тем не менее, описанная технология является применимой ко многим другим процедурам в анестезии, купировании боли и лечении рака, например, для биопсий.
Также следует понимать, что настоящее изобретение будет описано с точки зрения медицинских инструментов; тем не менее, идеи настоящего изобретения являются гораздо более широкими и являются применимыми к любым наводимым инструментам. В некоторых вариантах осуществления настоящие принципы используются в отслеживании инструментов для биологических или механических систем. В частности, настоящие принципы являются применимыми к внутреннему отслеживанию процедур относительно биологических систем, процедур во всех областях тела, таких как легкие, желудочно-кишечный тракт, выводные органы, кровеносные сосуды и т.д. Элементы, проиллюстрированные на чертежах, могут быть реализованы в различных комбинациях аппаратных средств и программного обеспечения и предоставлять функции, которые могут быть скомбинированы в одном элементе или нескольких элементах.
Функции различных элементов, показанных на чертежах, могут быть предоставлены посредством использования специализированных аппаратных средств, а также аппаратных средств, допускающих выполнение программного обеспечения, связанного с соответствующим программным обеспечением. При предоставлении посредством процессора функции могут предоставляться посредством одного специализированного процессора, посредством одного совместно используемого процессора или посредством множества отдельных процессоров, некоторые из которых могут совместно использоваться. Кроме того, явное использование термина «процессор» или «контроллер» не должно рассматриваться как означающее исключительно аппаратные средства, допускающие выполнение программного обеспечения, и может неявно включать в себя, без ограничений, аппаратные средства процессора цифровых сигналов (DSP), постоянное запоминающее устройство (ROM) для сохранения программного обеспечения, оперативное запоминающее устройство (RAM), энергонезависимое устройство хранения и т.д.
Более того, все заявления в данном документе, касающиеся принципов, аспектов и вариантов осуществления изобретения, а также его конкретных примеров, предназначены для того, чтобы включать в себя структурные и функциональные эквиваленты. Дополнительно, эти эквиваленты должны включать в себя как известные в данный момент эквиваленты, так и эквиваленты, разрабатываемые в будущем (т.е. все разрабатываемые элементы, которые выполняют эту функцию, вне зависимости от структуры). Таким образом, к примеру, специалисты в области техники должны признавать, что блок-схемы, представленные в данном документе, означают концептуальные представления иллюстративных системных компонентов и/или схем, осуществляющих принципы изобретения. Аналогично, следует принимать во внимание, что все блок-схемы последовательности операций, блок-схемы и т.п. представляют различные процессы, которые могут быть представлены большей частью на машиночитаемых носителях данных и в силу этого выполнены посредством компьютера или процессора, независимо от того, показан или нет в явной форме такой компьютер или процессор.
Кроме того, варианты осуществления настоящего изобретения могут принимать форму компьютерного программного продукта, доступного из используемого машиной или машиночитаемого носителя данных, предоставляющего программный код для использования посредством или в связи с компьютером либо любой системой выполнения инструкций. В целях этого описания используемый машиной или машиночитаемый носитель данных может представлять собой любое устройство, которое может включать в себя, хранить, передавать, распространять или транспортировать программу для использования посредством или в связи с системой, аппаратом или устройством выполнения инструкций. Носитель может представлять собой электронную, магнитную, оптическую, электромагнитную, инфракрасную или полупроводниковую систему (либо аппарат или устройств) или среду распространения. Примеры машиночитаемого носителя включают в себя полупроводниковое или твердотельное запоминающее устройство, магнитную ленту, съемную компьютерную дискету, оперативное запоминающее устройство (RAM), постоянное запоминающее устройство (ROM), жесткий магнитный диск и оптический диск. Текущие примеры оптических дисков включают в себя постоянное запоминающее устройство на компакт дисках (CD-ROM), читаемый/записываемый компакт диск (CD-R/W), Blu-Ray™ и DVD.
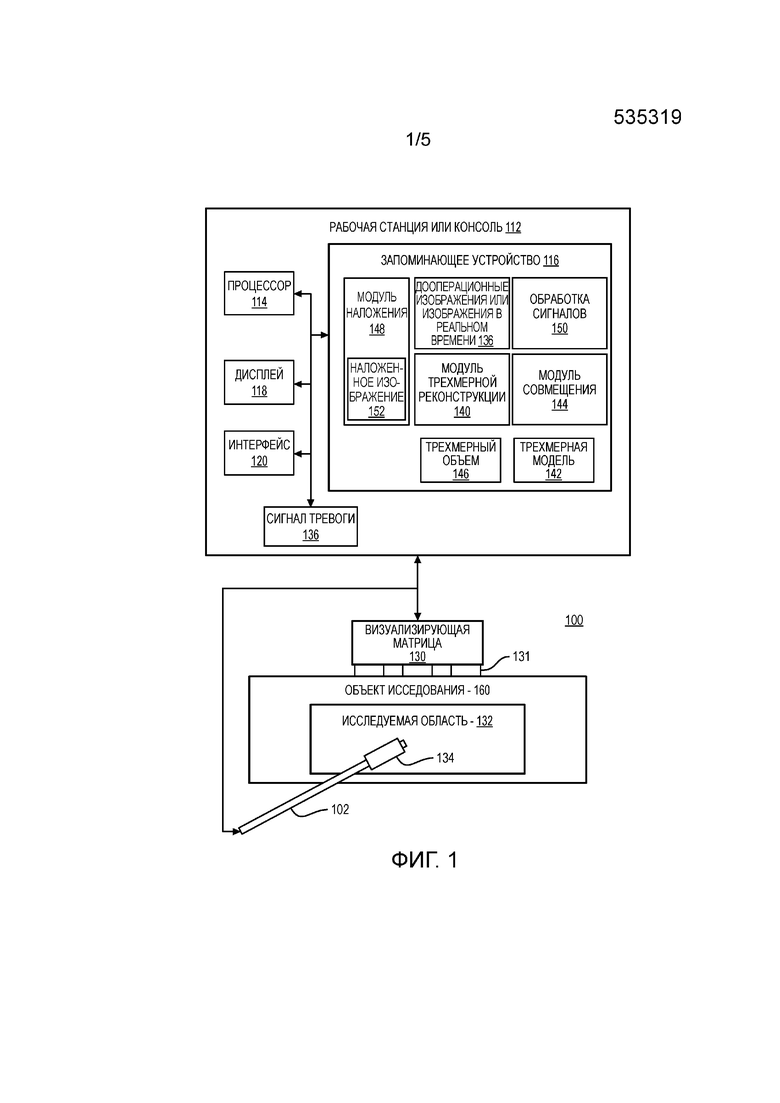
Далее со ссылкой на чертежи, на которых аналогичные номера представляют идентичные или аналогичные элементы, и первоначально на фиг. 1, иллюстративно показана система 100 для наведения инструмента в соответствии с одним вариантом осуществления. Система 100 может включать в себя рабочую станцию или консоль 112, из которой контролируется и/или управляется процедура. Рабочая станция 112 предпочтительно включает в себя один или более процессоров 114 и запоминающее устройство 116 для сохранения программ и приложений. Запоминающее устройство 116 сохраняет множество модулей, выполненных с возможностью интерпретировать визуализацию и другие сигналы обратной связи, чтобы определять положение инструмента относительно цели или плана и относительно окружающих признаков (или тканей в хирургическом окружении).
Запоминающее устройство 116 включает в себя модуль 140 реконструкции трехмерных объемов для реконструкции трехмерного объема(ов) 146 из двумерных интраоперационных изображений, например, ультразвуковых изображений. В одном варианте осуществления интраоперационные трехмерные изображения могут быть собраны и включены в трехмерный объем 146. Модуль 140 реконструкции трехмерных объемов может включать в себя алгоритмы или способы реконструкции, которые используют множество двумерных изображений для того, чтобы построить трехмерный объем 146. Такие алгоритмы могут включать в себя способы спекл-корреляции или другие технологии. В одном варианте осуществления трехмерная статистическая модель или модели 142 предоставляются для исследуемой области 132. Эти модели 142 могут включать в себя предоперационные объемы изображений, например, дооперационные КТ-изображения исследуемой области или признаков в исследуемой области, например, позвонков для процедуры с эпидуральной инъекцией.
Модуль 144 совмещения может совмещать реконструированный трехмерный объем (из модуля 140) со статистическим атласом или дооперационной КТ-моделью 142. В одном варианте осуществления модуль 144 совмещения идентифицирует признаки или векторы признаков в каждом изображении, реконструкции или модели и состыковывает признаки, чтобы обеспечивать совмещение между ними. Также могут использоваться другие способы совмещения.
Матрица 130 интраоперационных визуализирующих измерительных преобразователей (например, ультразвуковых, хотя могут использоваться другие устройства визуализации) предоставляется для сканирования исследуемой области 132 в объекте 160 исследования (например, пациенте, модуле, устройстве и т.д.). Инструмент 102, подлежащий наведению в соответствии с настоящими принципами, может включать в себя иглу, катетер, проволочный направитель катетера или любой другой наводимый инструмент. Один или более одноэлементных измерительных преобразователей 134 вставляются в инструмент 102 в исследуемом положении, например, в или около наконечника иглы, используемой для эпидуральной инъекции.
Одноэлементный измерительный преобразователь(и) 134 используется в ходе процедуры, чтобы определять тип ткани, через которую инструмент 102 (например, игла) в данный момент проходит или находится в контакте. Этот признак предоставляет релевантную информацию в реальном времени (на месте) оперирующему врачу или технику, чтобы предоставлять обратную связь относительно того, куда проникает игла (102), и предоставлять указатель, когда игла достигает своей целевой глубины или положения. Помимо этого сигнал 136 тревоги может быть активирован в случае, когда игла испытывает неожиданное изменение или отклоняется от запланированной траектории или глубины.
Модуль 144 совмещения включает в себя алгоритм на основе изображений для совмещения двумерных УЗ-изображений в реальном времени, снимаемых посредством измерительных преобразователей 131 из матрицы 130 измерительных преобразователей, с реконструированным трехмерным объемом 146. Модуль 148 наложения выполнен с возможностью накладывать положения наконечника инструмента 102 в реальном времени на изображение, такое как трехмерный объем, на атлас или модель 142 или на дооперационные КТ-изображения. Игла 102 может быть визуализирована поверх трехмерного плана или изображения (модели) 142 с использованием наложенного изображения 152 и модуля 150 обработки сигналов. Наложенное изображение 152 может предоставлять указатели относительно типа ткани или другие данные, релевантные для траектории и глубины проникновения иглы.
Модуль 148 наложения генерирует положение наконечника в изображениях в реальном времени и отображает ее на графическом пользовательском интерфейсе (GUI), к примеру, на дисплее 118. Модуль 148 наложения принимает данные изображений из одного или более изображений, атласа или модели и указывает положение измерительного преобразователя на изображении(ях), атласе или модели. Наложенное изображение 152 точно совмещается на фоновом изображении(ях), атласе или модели, чтобы отображать положение инструмента 102 в исследуемой области 132. Модуль 150 обработки (или алгоритм обработки) сигналов определяет положение и ориентацию инструмента 102 в исследуемой области 132.
Рабочая станция 112 включает в себя дисплей 118 для просмотра внутренних изображений объекта 160 исследования (пациента или объема) и наложенного изображения 152. Дисплей 118 также может позволять пользователю взаимодействовать с рабочей станцией 112 и ее компонентами и функциями либо любым другим элементом в системе 100. Это дополнительно упрощается посредством интерфейса 120, который может включать в себя клавиатуру, мышь, джойстик, тактильное устройство или любое другое периферийное устройство либо средство управления, чтобы позволять пользователю обратную связь и взаимодействие с рабочей станцией 112.
Ссылаясь на фиг. 2A и 2B, соответственно, проиллюстрированы ультразвуковые изображения 200 и 202 позвоночника. Изображения 200 и 202 показывают спинномозговой процесс 204 и область 206 желтых связок/задней твердой мозговой оболочки. Помимо этого, идентифицируется тело 208 позвонка (и/или передняя твердая мозговая оболочка). На фиг. 2A, игла является невидимой или является едва видимой. На фиг. 2B, используется модуль 150 обработки или алгоритм обработки сигналов, который выделяет наконечник иглы для точного пространственного позиционирования иглы. Наконечник иглы указывается посредством небольшой окружности 210, наложенной на ультразвуковое изображение 202. Анализ сигналов в наконечнике иглы дополнительно предоставляет указатель типа ткани, в которой находится игла. Наложение 212 включает в себя окружность 210, чтобы выделять наконечник иглы, и включает в себя класс сигналов и указатель 214 тканей, который указывает ткань (например, жир в этом случае), в которую внедрен наконечник, на основе класса сигналов из анализа сигналов.
Ссылаясь на фиг. 3, блок-схема последовательности операций показывает способ для отслеживания инструмента в соответствии с настоящими принципами. На этапе 302 быстрая развертка в направлении подъема линейного зонда (например, ультразвукового зонда) может быть использована для того, чтобы сконструировать трехмерный объем на этапе 303 спинальной анатомии пациента из двумерных изображений 143 с использованием, например, способов спекл-корреляции. На этапе 304 трехмерный объем затем может быть совмещен со статистической моделью, атласом или дооперационными КТ-изображениями (модели 146) позвонков 145. Это улучшает трехмерное понимание анатомии перед вмешательством. На этапе 306 передаваемое в реальном масштабе времени изображение 147 (например, УЗ-изображение) теперь может быть совмещено на этом трехмерном плане 149 (включающем в себя модели, атлас изображений и т.д.) с использованием алгоритма слияния срезов и объемов. На этапе 308 инструмент 102 (например, игла) далее вводится в пациента и локализуется. Игла может отслеживаться в трехмерном режиме с использованием технологии отслеживания иглы (на месте) (например, с использованием ультразвукового измерительного преобразователя 134 или измерительных преобразователей на игле). На этапе 310 технология на месте используется для того, чтобы определять тип ткани, через которую игла в данный момент проходит или находится в контакте. Этот признак предоставляет релевантную информацию в реальном времени (на месте) оперирующему врачу или технику, чтобы предоставлять обратную связь относительно того, куда проникает игла, и предоставлять указатель, когда игла достигает своей целевой глубины или положения. Помимо этого сигнал тревоги может активироваться в случае, когда игла испытывает неожиданное изменение или отклоняется от запланированной траектории или глубины. На этапе 310 игла 102 может быть визуализирована поверх трехмерного плана или изображения с использованием наложенного изображения и алгоритмов обработки сигналов. Наложение может предоставлять указатели относительно типа ткани или другие данные, релевантные для траектории и глубины проникновения иглы.
Снова ссылаясь на этап 308, пространственное положение наконечника иглы относительно системы отсчета, прилагаемой к ультразвуковому изображению, известно с помощью технологии на месте. Технология на месте означает способность отслеживать иглу или инструмент наряду с отображениями визуализации в реальном времени. В конкретных полезных вариантах осуществления технология на месте включает в себя использование одного или более датчиков, измерительных преобразователей, транспондеров и т.д., установленных на или в игле или инструменте и расположенных в исследуемом положении на игле или инструменте. В конкретном полезном варианте осуществления датчик в наконечнике иглы принимает сигналы из визуализирующего зонда по мере того, как его пучки развертывают поле зрения. Время поступления этих пучков предоставляет расстояние от датчика до визуализирующей матрицы, а профиль амплитуды пучков дает поперечное или угловое расстояние. Также могут использоваться другие разновидности идентичных принципов. Например, датчик наконечника может быть активным и генерировать собственный ультразвуковой сигнал, быть пассивным и отражать или транспондировать принимаемый ультразвуковой сигнал.
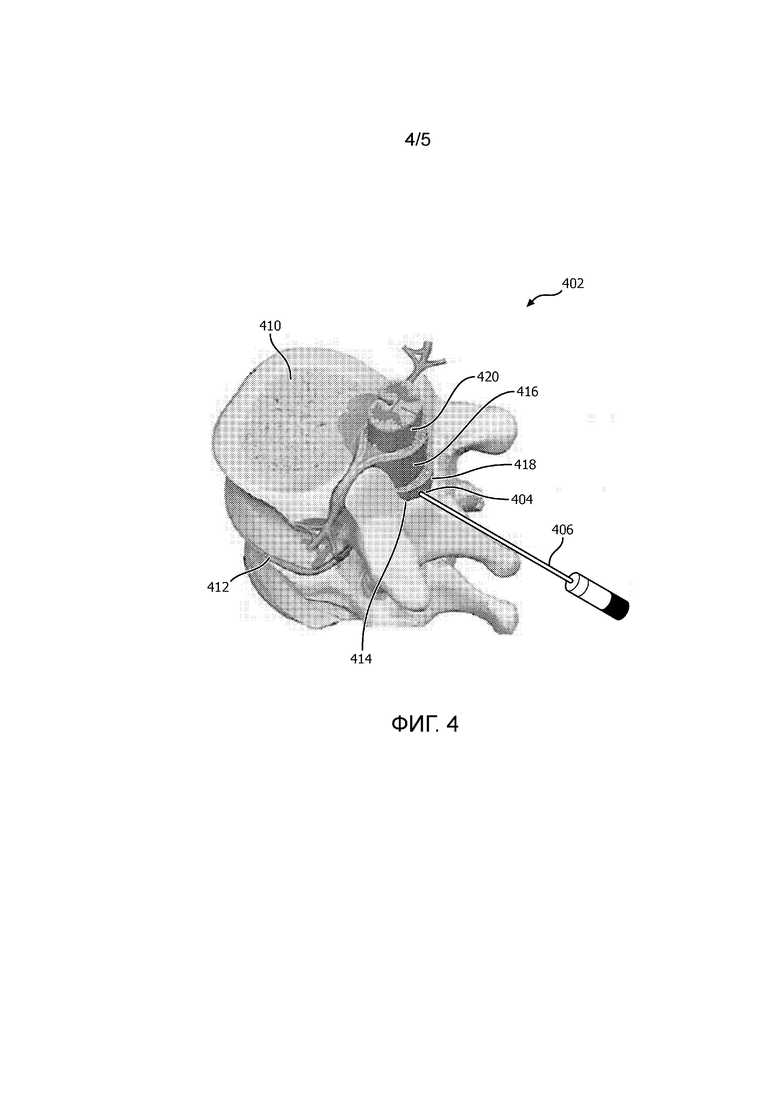
Ссылаясь на фиг. 4, показана часть позвоночника 402, с тем чтобы проиллюстрировать вариант применения в соответствии с этапом 310. Позвоночник 402 включает в себя тела 410 позвонка с межпозвоночными дисками 412, расположенными между ними. Эпидуральное пространство 414 представляет собой область пространства между крайним внешним слоем 416 тканей (твердой мозговой оболочкой) и внутренней поверхностью кости 418 и поддерживающими связками. Эпидуральное пространство 414 содержит жировые ткани вместе с кровеносными сосудами и нервными корешками.
Одноэлементный (или многоэлементный) ультразвуковой измерительный преобразователь 404 также предпочтительно используется для того, чтобы измерять акустические характеристики тканей, которые окружают наконечник иглы 406. С использованием технологий классификации можно отличать мышцу, связку, жир, кость и ткань нерва и, следовательно, уведомлять врача, как только наконечник иглы 406 пересекает желтые связки в жировом эпидуральном пространстве 414, либо предупреждать медика, если игла 406 вводится в спинной мозг 420, и не допускать серьезных осложнений вследствие инъекции в нежелательные области анестезии.
Измерительный преобразователь 404 на наконечнике иглы 406 предпочтительно используется в импульсно-эховом режиме. Его рабочая частота является такой, что он зондирует несколько миллиметров ткани вокруг измерительного преобразователя 404 (например, в диапазоне в 20-40 МГц). Следует отметить, что такой высокочастотный элемент легко встраивается в иглу вследствие своих небольших размеров и при этом имеет возможность принимать сигналы из более низкочастотного (~3 МГц) визуализирующего зонда в гидростатическом режиме. Характеристики импульсно-эхового сигнала, например, ослабление ультразвука в качестве функции глубины и частотно-зависимое ослабление, измеренное посредством временной фильтрации и подгонки определенной огибающей сигнала, используются для классификации сигналов. Характеристики и свойства различных тканей могут характеризоваться заранее и использоваться для сравнения с сигналами в реальном времени, чтобы выполнять классификацию сигналов. Два ортогональных или угловых датчика также могут использоваться для того, чтобы измерять анизотропию среды (связки являются очень анизотропными, но эпидуральное пространство 414 является изотропным).
Присутствие датчика в или около наконечника иглы в комбинации с усовершенствованным дисплеем с выделенным и отслеживаемым положением наконечника и классификатором типа ткани предоставляет высоконадежное инструментальное средство для ввода инструмента через слои тканей и избегания чувствительных тканей. Анализ обработки сигналов используется для выполнения локализации и классификации, чтобы придавать уверенность оперирующему врачу в отношении положения иглы или инструмента. В конкретных полезных примерах ввод иглы под ультразвуковым контролем наведения (с использованием обоих модулей локализации иглы и дифференциации тканей либо с использованием только модуля дифференциации тканей) может использоваться для купирования боли и процедур с регионарной анестезией, биопсий всех видов, включающих в себя биопсии раковой опухоли, амниоцентез, спинномозговую пункцию, сосудистый доступ, процедур с дренажом и т.д.
Ссылаясь на фиг. 5, показан другой вариант осуществления для отслеживания проникающего инструмента. На этапе 502 генерирую сигналы из множества положений в матрице, чтобы предоставлять одно или более изображений исследуемой области в реальном времени. В полезных вариантах осуществления изображения в реальном времени собирают ультразвуковым методом. Ультразвуковые изображения могут включать в себя двумерные изображения и, возможно, должны быть реконструированы, чтобы формировать трехмерные объемы. Также могут использоваться трехмерные ультразвуковые изображения. На этапе 504 объем трехмерного изображения исследуемой области может быть реконструирован из двумерных изображений для одного или более изображений в реальном времени. На этапе 506 двумерные изображения, снимаемые в реальном времени, могут быть совмещены с объемом трехмерного изображения исследуемой области и/или опорным изображением (атлас, изображение, модель и т.д.), чтобы улучшить визуализацию инструмента. В одном варианте осуществления опорное изображение может включать в себя позвонок или позвонки (либо другую кость(и)).
На этапе 508 предоставляется проникающий инструмент, имеющий тело с по меньшей мере одним датчиком, установленным в исследуемом положении на упомянутом теле. Датчик реагирует на сигналы из множества положений в матрице.
На этапе 510 положение и ориентация проникающего инструмента определяются в соответствии с сигналами из упомянутого множества положений в матрице с использованием модуля обработки сигналов. В одном варианте осуществления датчик для проникающего инструмента выполнен с возможностью измерять время пролета от упомянутого множества положений в матрице, чтобы определять положение и ориентацию проникающего инструмента. На этапе 512 среда, в которой позиционировано исследуемое положение, классифицируется на основе реакции датчика на сигналы из упомянутого множества положений в матрице. На этапе 514 наложенное изображение генерируется и совмещается с одним или более изображений в реальном времени, чтобы идентифицировать положение исследуемого положения и предоставлять обратную связь относительно среды, в которой позиционируется исследуемое положение. Положение предпочтительно выделяется в наложенном изображении, а среда (например, тип ткани) может быть указана в наложенном изображении. На этапе 516 проникающий инструмент может включать в себя иглу, исследуемое положение может включать в себя дистальный наконечник иглы, а среда может включать в себя тип ткани. Материал, такой как обезболивающие, может быть введен через иглу, когда выбранный тип ткани указывается в наложенном изображении. Например, в случае если используется эпидуральная игла, когда жировая ткань встречается после ткани связок, достигается эпидуральное пространство, и препарат может быть введен. На этапе 518 наложенное изображение отображается на одном или более изображений в реальном времени.
При интерпретации прилагаемой формулы изобретения следует понимать, что:
a) слово «содержащий» не исключает наличия других элементов или этапов, не перечисленных в данном пункте формулы изобретения;
b) единственное число не исключает наличия множества таких элементов;
c) любые номера ссылок в формуле изобретения не ограничивают их объем;
d) несколько «средств» могут представляться посредством одного элемента либо аппаратно- или программно-реализованной структуры либо функции; и
e) конкретная последовательность действий не должна быть обязательной, если конкретно не указано иное.
После описания предпочтительных вариантов осуществления для наведения проникающих инструментов в эпидуральных вмешательствах с использованием интеллектуальных игл и усовершенствованного слияния изображений (которые имеют намерение быть иллюстративными, а не ограничивающими), следует отметить, что модификации и вариации могут вноситься специалистами в области техники в свете вышеуказанных идей. Следовательно, необходимо понимать, что изменения могут быть сделаны в конкретных вариантах осуществления представленного раскрытия сущности, которые находятся в пределах объема вариантов осуществления, раскрытых в данном документе, как указано посредством прилагаемой формулы изобретения. В силу такого описания подробностей и особенностей, требуемых посредством патентного законодательства, все, что заявлено и должно быть защищено посредством патента на изобретение, изложено в прилагаемой формуле изобретения.


Группа изобретений относится к медицинской технике, а именно к средствам отслеживания проникающего инструмента. Система содержит матрицу интраоперационных измерительных преобразователей, выполненную с возможностью генерировать сигналы из положений в матрице и обеспечивать одно или более изображений целевой области в реальном времени, проникающий инструмент, имеющий тело с по меньшей мере одним датчиком, установленным в целевом положении на теле проникающего инструмента, причем датчик реагирует на сигналы из положений в матрице, модуль обработки сигналов, выполненный с возможностью определять положение и ориентацию проникающего инструмента в соответствии с сигналами из положений в матрице, причем модуль обработки сигналов дополнительно выполнен с возможностью классифицировать среду, в которой позиционировано целевое положение, на основе реакции упомянутого по меньшей мере одного датчика на сигналы из положений в матрице, модуль наложения, выполненный с возможностью генерировать наложенное изображение, совмещенное с одним или более изображениями в реальном времени, чтобы идентифицировать положение целевого положения и обеспечивать визуальную обратную связь по классификации среды, в которой позиционировано целевое положение, дисплей и модуль совмещения, выполненный с возможностью совмещать опорное изображение с объемом трехмерного изображения целевой области, причем объем трехмерного изображения целевой области реконструирован из двумерных изображений одного или более изображений в реальном времени. В еще одной системе проникающий инструмент имеет ультразвуковой датчик, установленный в или около положения дистального наконечника, и модуль обработки сигналов, выполненный с возможностью классифицировать тип ткани, в которой позиционирован наконечник проникающего инструмента, на основе реакции датчика на сигналы из положений в матрице. Способ отслеживания проникающего инструмента включает генерацию сигналов из положений в матрице, чтобы сгенерировать одно или более изображений целевой области в реальном времени, обеспечение проникающего инструмента, имеющего тело с датчиком, установленным в целевом положении на теле, причем датчик реагирует на сигналы из множества положений в матрице, определение положения и ориентации проникающего инструмента в соответствии с сигналами из положений в матрице с использованием модуля обработки сигналов, классификацию среды, в которой позиционировано целевое положение, на основе реакции датчика на сигналы из положений в матрице, генерацию наложенного изображения, совмещенного с одним или более изображениями в реальном времени, чтобы идентифицировать положение целевого положения и предоставить обратную связь относительно среды, в которой позиционировано целевое положение, отображение наложенного изображения на упомянутом одном или более изображениях в реальном времени, реконструкцию объема трехмерного изображения целевой области из двумерных изображений одного или более изображений в реальном времени и совмещение опорного изображения с объемом трехмерного изображения целевой области. Система для отслеживания проникающего инструмента внутри субъекта содержит матрицу ультразвуковых измерительных преобразователей, выполненную с возможностью генерировать ультразвуковые сигналы из положений в матрице и обеспечивать одно или более изображений целевой области в реальном времени, проникающий инструмент, имеющий тело с по меньшей мере одним ультразвуковым измерительным преобразователем, установленным в целевом положении на теле проникающего инструмента, который реагирует на ультразвуковые сигналы из положений в матрице, модуль обработки сигналов, выполненный с возможностью определять положение и ориентацию проникающего инструмента в соответствии с ультразвуковыми сигналами, генерируемыми положениями в матрице, на основе реакции по меньшей мере одного датчика на сигналы из положений в матрице, причем модуль обработки сигналов дополнительно выполнен с возможностью выполнять классификацию среды, в которой позиционировано целевое положение, включающее по меньшей мере один ультразвуковой измерительный преобразователь, причем классификация среды основана на сигналах импульсно-эхового режима, преобразованных упомянутым по меньшей мере одним ультразвуковым измерительным преобразователем, а сигналы импульсно-эхового режима предназначены для измерения акустических характеристик окружающей ткани, модуль наложения и дисплей. В еще одной системе ультразвуковой измерительный преобразователь установлен в или около положения дистального наконечника, система также содержит модуль обработки сигналов, выполненный с возможностью определять положение и ориентацию проникающего инструмента внутри субъекта в соответствии с ультразвуковыми сигналами, генерируемыми из положений в матрице, и ультразвуковыми сигналами, принимаемыми ультразвуковым измерительным преобразователем, и классифицировать тип ткани, в которой расположен наконечник проникающего инструмента, на основании сигналов импульсно-эхового режима, преобразованных ультразвуковым измерительным преобразователем, причем сигналы импульсно-эхового режима предназначены для измерения акустических характеристик окружающей ткани. Способ отслеживания проникающего инструмента, имеющего тело с ультразвуковым измерительным преобразователем осуществляется посредством системы с ультразвуковыми сигналами, принимаемыми ультразвуковым измерительным преобразователем. Использование изобретений позволяет точно локализовать наконечник иглы на ультразвуковом изображении для пространственного наведения при эпидуральных и других вмешательствах. 6 н. и 18 з.п. ф-лы, 5 ил.
1. Система для отслеживания проникающего инструмента, содержащая:
матрицу (130) интраоперационных измерительных преобразователей, выполненную с возможностью генерировать сигналы из положений в матрице и обеспечивать одно или более изображений целевой области в реальном времени;
проникающий инструмент (102), имеющий тело с по меньшей мере одним датчиком (134), установленным в целевом положении на упомянутом теле проникающего инструмента (102), причем упомянутый по меньшей мере один датчик реагирует на сигналы из положений в матрице;
модуль (150) обработки сигналов, выполненный с возможностью определять положение и ориентацию проникающего инструмента в соответствии с сигналами из положений в матрице, причем модуль обработки сигналов дополнительно выполнен с возможностью классифицировать среду, в которой позиционировано целевое положение, на основе реакции упомянутого по меньшей мере одного датчика на сигналы из положений в матрице;
модуль (148) наложения, выполненный с возможностью генерировать наложенное изображение (152), совмещенное с упомянутым одним или более изображениями в реальном времени, чтобы идентифицировать положение целевого положения и обеспечивать визуальную обратную связь по классификации среды, в которой позиционировано целевое положение;
дисплей (118), выполненный с возможностью предоставлять визуальную обратную связь наложенного изображения (152) на упомянутом одном или более изображениях в реальном времени, и
модуль (144) совмещения, выполненный с возможностью совмещать опорное изображение с объемом трехмерного изображения целевой области, причем объем трехмерного изображения целевой области реконструирован из двумерных изображений упомянутого одного или более изображений в реальном времени.
2. Система по п. 1, в которой матрица (130) интраоперационных измерительных преобразователей включает в себя ультразвуковые измерительные преобразователи, причем система дополнительно содержит:
модуль (140) трехмерной реконструкции, выполненный с возможностью реконструкции объема трехмерного изображения целевой области из двумерных изображений.
3. Система по п. 2, причем модуль (144) совмещения выполнен с возможностью совмещать двумерные изображения в реальном времени с упомянутым объемом трехмерного изображения целевой области.
4. Система по п. 1, в которой проникающий инструмент (102) включает в себя иглу, а целевое положение включает в себя дистальный наконечник иглы.
5. Система по п. 4, в которой упомянутая среда включают в себя тип ткани и этот тип ткани используется в качестве указателя того, когда материал должен впрыскиваться через иглу.
6. Система по п. 5, в которой тип ткани отображается на наложенном изображении (152) в качестве индикатора для впрыскивания материала через иглу.
7. Система по п. 1, в которой упомянутый по меньшей мере один датчик (134) проникающего инструмента выполнен с возможностью измерять время пролета от положений в матрице, чтобы определять положение и ориентацию проникающего инструмента.
8. Система для отслеживания проникающего инструмента, содержащая:
модуль (150) обработки сигналов, выполненный с возможностью:
определять положение и ориентацию проникающего инструмента (102) в соответствии с сигналами из положений в матрице, причем проникающий инструмент имеет ультразвуковой датчик (134), установленный в или около положения дистального наконечника;
классифицировать тип ткани, в которой позиционирован наконечник проникающего инструмента, на основе реакции датчика на сигналы из положений в матрице; и
модуль (144) совмещения, выполненный с возможностью совмещать опорное изображение с объемом трехмерного изображения целевой области, причем объем трехмерного изображения целевой области реконструирован из двумерных изображений упомянутого одного или более изображений в реальном времени.
9. Система по п. 8, дополнительно содержащая:
матрицу (130) интраоперационных ультразвуковых измерительных преобразователей, выполненную с возможностью генерировать сигналы из положений в матрице, чтобы обеспечивать одно или более изображений целевой области в реальном времени.
10. Система по п. 9, дополнительно содержащая:
модуль (148) наложения, выполненный с возможностью генерировать наложенное изображение (152), совмещенное с упомянутым одним или более изображениями в реальном времени, причем наложенное изображение включает в себя выделенное положение проникающего инструмента и идентификатор типа ткани.
11. Система по п. 10, дополнительно содержащая:
дисплей (118), выполненный с возможностью предоставлять визуальную обратную связь наложенного изображения на упомянутом одном или более изображениях в реальном времени.
12. Система по п. 11, в которой упомянутое одно или более изображений в реальном времени включают в себя одно или более двумерных изображений, причем система дополнительно содержит:
модуль (140) трехмерной реконструкции, выполненный с возможностью реконструировать объем трехмерного изображения целевой области из упомянутого одного или более двумерных изображений.
13. Система по п. 12, дополнительно содержащая модуль (144) совмещения, выполненный с возможностью совмещать упомянутое одно или более двумерных изображений в реальном времени с упомянутым объемом трехмерного изображения целевой области.
14. Система по п. 8, в которой проникающий инструмент (102) содержит иглу.
15. Система по п. 8, в которой тип ткани используется в качестве указателя того, когда материал должен впрыскиваться через проникающий инструмент (102).
16. Система по п. 8, причем проникающий инструмент (102) используется для эпидурального вмешательства.
17. Способ отслеживания проникающего инструмента, содержащий:
генерацию (502) сигналов из положений в матрице, чтобы сгенерировать одно или более изображений целевой области в реальном времени;
обеспечение (508) проникающего инструмента, имеющего тело с датчиком, установленным в целевом положении на упомянутом теле, причем датчик реагирует на сигналы из упомянутого множества положений в матрице;
определение (510) положения и ориентации проникающего инструмента в соответствии с сигналами из положений в матрице с использованием модуля обработки сигналов;
классификацию (512) среды, в которой позиционировано целевое положение, на основе реакции датчика на сигналы из положений в матрице;
генерацию (514) наложенного изображения, совмещенного с упомянутыми одним или более изображениями в реальном времени, чтобы идентифицировать положение целевого положения и предоставить обратную связь относительно среды, в которой позиционировано целевое положение;
отображение (518) наложенного изображения на упомянутом одном или более изображениях в реальном времени;
реконструкцию (504) объема трехмерного изображения целевой области из двумерных изображений упомянутого одного или более изображений в реальном времени; и
совмещение (506) опорного изображения с объемом трехмерного изображения целевой области.
18. Способ по п. 17, в котором проникающий инструмент включает в себя иглу, целевое положение включает в себя дистальный наконечник иглы, а упомянутая среда включает в себя тип ткани, причем способ дополнительно содержит впрыскивание (516) материала через иглу, когда выбранный тип ткани указан в наложенном изображении.
19. Система для отслеживания проникающего инструмента внутри субъекта, содержащая:
матрицу (130) ультразвуковых измерительных преобразователей, выполненную с возможностью генерировать ультразвуковые сигналы из положений в матрице и обеспечивать одно или более изображений целевой области в реальном времени;
проникающий инструмент (102), имеющий тело с по меньшей мере одним ультразвуковым измерительным преобразователем (134, 404), установленным в целевом положении на упомянутом теле проникающего инструмента (102), для проникновения внутрь субъекта, причем упомянутый по меньшей мере один ультразвуковой измерительный преобразователь реагирует на ультразвуковые сигналы из положений в матрице;
модуль (150) обработки сигналов, выполненный с возможностью определять положение и ориентацию проникающего инструмента в соответствии с ультразвуковыми сигналами, генерируемыми положениями в матрице, на основе реакции упомянутого по меньшей мере одного датчика на сигналы из положений в матрице, причем модуль (150) обработки сигналов дополнительно выполнен с возможностью выполнять классификацию среды, в которой позиционировано целевое положение, включающее упомянутый по меньшей мере один ультразвуковой измерительный преобразователь (134, 404), причем классификация среды основана на сигналах импульсно-эхового режима, преобразованных упомянутым по меньшей мере одним ультразвуковым измерительным преобразователем (134, 404), причем сигналы импульсно-эхового режима предназначены для измерения акустических характеристик окружающей ткани;
модуль (148) наложения, выполненный с возможностью генерировать наложенное изображение (152), совмещенное с упомянутым одним или более изображениями в реальном времени, чтобы идентифицировать положение целевого положения и обеспечить визуальную обратную связь по классификации среды, в которой позиционировано целевое положение; и
дисплей (118), выполненный с возможностью предоставлять визуальную обратную связь наложенного изображения (152) на упомянутом одном или более изображениях в реальном времени.
20. Система по п. 19, дополнительно содержащая модуль (144) совмещения, выполненный с возможностью совмещать опорное изображение с объемом трехмерного изображения целевой области, причем объем трехмерного изображения реконструирован из двумерных изображений упомянутого одного или более изображений в реальном времени.
21. Система для отслеживания проникающего инструмента внутри субъекта, имеющего ультразвуковой измерительный преобразователь (134, 404), установленный в или около положения дистального наконечника, основанный на ультразвуковых сигналах, генерируемых положениями в матрице ультразвуковых измерительных преобразователей, содержащая:
модуль (150) обработки сигналов, выполненный с возможностью:
определять положение и ориентацию проникающего инструмента (102) внутри субъекта в соответствии с ультразвуковыми сигналами, генерируемыми из положений в матрице, и ультразвуковыми сигналами, принимаемыми ультразвуковым измерительным преобразователем (134, 404); и
классифицировать тип ткани, в которой расположен наконечник проникающего инструмента, проникающий внутрь субъекта, на основании сигналов импульсно-эхового режима, преобразованных ультразвуковым измерительным преобразователем (134, 404), причем сигналы импульсно-эхового режима предназначены для измерения акустических характеристик окружающей ткани.
22. Система по п. 21, дополнительно содержащая модуль (144) совмещения, выполненный с возможностью совмещать опорное изображение с объемом трехмерного изображения целевой области, причем объем трехмерного изображения реконструирован из двумерных изображений упомянутого одного или более изображений в реальном времени.
23. Способ отслеживания проникающего инструмента, имеющего тело с ультразвуковым измерительным преобразователем (134, 404), установленным в целевом положении на упомянутом теле проникающего инструмента (102) и реагирующим на ультразвуковые сигналы из положений в матрице, содержащий:
генерацию (502) ультразвуковых сигналов из положений в матрице, чтобы сгенерировать одно или более изображений целевой области в реальном времени;
определение (510) положения и ориентации проникающего инструмента, проникающего внутрь субъекта, в соответствии с ультразвуковыми сигналами из положений в матрице и ультразвуковыми сигналами, принятыми расположенным внутри субъекта ультразвуковым измерительным преобразователем (134, 404), с использованием модуля обработки сигналов;
классификацию (512) среды, в которой позиционировано целевое положение, на основе сигналов импульсно-эхового режима, преобразованных ультразвуковым измерительным преобразователем (134, 404), причем сигналы импульсно-эхового режима предназначены для измерения акустических характеристик окружающей ткани;
генерацию (514) наложенного изображения (152), совмещенного с упомянутыми одним или более изображениями в реальном времени, чтобы идентифицировать положение целевого положения и предоставить визуальную обратную связь по среде, в которой позиционировано целевое положение; и
отображение (518) наложенного изображения на упомянутом одном или более изображениях в реальном времени.
24. Способ по п. 23, дополнительно содержащий:
реконструкцию (504) объема трехмерного изображения целевой области из двумерных изображений упомянутого одного или более изображений в реальном времени; и
совмещение (506) опорного изображения с объемом трехмерного изображения целевой области.
| US 2004131299 A1, 08.07.2004 | |||
| Wolfgang Wein et al | |||
| Automatic CT-ultrasound registration for diagnostic imaging and image-guided intervention, Medical Image Analysis, 12 (2008), pp | |||
| ПРИСПОСОБЛЕНИЕ ДЛЯ ПУСКА В ХОД АВИАЦИОННЫХ МОТОРОВ | 1924 |
|
SU577A1 |
| WO 2012066470 A1, 24.05.2012 | |||
| WO 2013001437 A1, 03.01.2013 | |||
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ ОБЪЕКТА В РАССЕЯННОМ И/ИЛИ ПРОШЕДШЕМ ИЗЛУЧЕНИИ | 2004 |
|
RU2256169C1 |

