Область техники
Настоящее изобретение относится к области двухвинтовых соосных автономных вертолетов, и, в частности, относится к способу и устройству для приведения во вращение несущего винта.
Уровень техники
Так называемый, двухвинтовой соосный автономный вертолет может содержать: верхний несущий винт и нижний несущий винт с той же конструкцией, главный вал, образованный внутренним валом и наружным валом, который вращается в противоположном направлении по отношению к внутреннему валу, причем верхний несущий винт установлен на одном из концов внутреннего вала, а нижний несущий винт установлен на одном из концов наружного вала, при этом верхний несущий винт расположен на определенном расстоянии от нижнего несущего винта, причем верхний несущий винт вращается вместе с внутренним валом, а нижний несущий винт вращается вместе с наружным валом так, что нижний несущий винт может вращаться в противоположном направлении по отношению к верхнему несущему винту, и, таким образом, крутящие моменты, создаваемые верхним и нижним несущими винтами могут поддерживать равновесие друг с другом в режиме полета при неизменном курсе без установки хвостового винта и хвостовой балки, при этом управление курсом может осуществляться за счет неуравновешенного крутящего момента, создаваемого разностью общих шагов верхнего и нижнего несущих винтов.
В уровне техники, архитектура системы приведения во вращение несущего винта, позволяющей управлять курсом в двухвинтовом соосном автономном вертолете является сложной, что в свою очередь имеет результатом сложный процесс приведения во вращение в соответствующем способе приведения во вращение несущего винта.
Сущность изобретения
Исходя из описанных выше проблем, варианты осуществления настоящего изобретения раскрывают способ и устройство для приведения во вращение несущего винта для того, чтобы преодолеть недостатки сложного процесса приведения во вращение в существующих способах, применяемых в системах приведения во вращение несущего винта. Предлагаются следующие технические решения.
В первом аспекте, варианты осуществления настоящего изобретения обеспечивают способ приведения во вращение несущего винта, который применим к двухвинтовому соосному автономному вертолету, при этом двухвинтовой соосный автономный вертолет содержит:
наружный вал 19;
втулку 14 нижнего несущего винта, закрепленную на внешней стороне одного из концов наружного вала 19;
по меньшей мере два зажимных элемента первой лопасти, соединенных с втулкой 14 нижнего несущего винта, причем каждый из зажимных элементов первой лопасти может быть закручен относительно втулки 14 нижнего несущего винта и содержит первый зажим 20 лопасти и второй зажим 22 лопасти, причем первый зажим 20 лопасти и второй зажим 22 лопасти совместно зажимают лопасть нижнего несущего винта;
внутренний вал 15;
втулку 16 верхнего несущего винта, закрепленную на внешней стороне одного из концов внутреннего вала 15;
по меньшей мере два зажимных элемента второй лопасти, соединенных с втулкой 16 верхнего несущего винта, причем каждый из зажимных элементов второй лопасти может быть закручен относительно втулки 16 верхнего несущего винта и содержит третий зажим 17 лопасти и четвертый зажим 18 лопасти, причем третий зажим 17 лопасти и четвертый зажим 18 лопасти совместно зажимают лопасть верхнего несущего винта;
коробку, вмещающую зубчатую передачу и содержащую верхнюю крышку 26, корпус 27 коробки и нижнюю крышку 1, причем зубчатая передача соединена с наружным валом 19 и внутренним валом 15;
синхронный шкив 7, соединенный с зубчатой передачей, причем вращение синхронного шкива 7 приводит во вращение зубчатую передачу таким образом, чтобы привести во вращение наружный вал 19 и внутренний вал 15, и причем наружный вал (19) вращается в противоположном направлении по отношению к внутреннему валу (15), втулка 14 нижнего несущего винта неподвижна относительно наружного вала 19, а втулка 16 верхнего несущего винта неподвижна относительно внутреннего вала 15;
систему приведения во вращение несущих винтов, содержащую систему приведения во вращение верхнего несущего винта и систему приведения во вращение нижнего несущего винта.
Способ приведения во вращение несущего винта может содержать:
прием команды на управление полетом;
получение текущих вращательных состояний первых двигателей 9, соответствующих по меньшей мере трем первым исполнительным механизмам 8 в системе приведения во вращение нижнего несущего винта и текущих вращательных состояний вторых двигателей 49, соответствующих по меньшей мере трем вторым исполнительным механизмам 58 в системе приведения во вращение верхнего несущего винта; при этом каждый из первых исполнительных механизмов 8 однозначно соответствует одному первому двигателю 9, каждый из вторых исполнительных механизмов 58 однозначно соответствует одному второму двигателю 59, при этом каждый из первых двигателей 9 однозначно соответствует одному текущему вращательному состоянию, каждый из вторых двигателей 49 однозначно соответствует одному текущему вращательному состоянию;
определение требуемых первых вращательных состояний первых двигателей 9 в соответствии с командой на управление полетом и текущими вращательными состояниями первых двигателей 9; причем каждый из первых двигателей 9 однозначно соответствует одному первому вращательному состоянию;
определение требуемых вторых вращательных состояний вторых двигателей 49 в соответствии с командой на управление полетом и текущими вращательными состояниями вторых двигателей 49; причем каждый из вторых двигателей 49 однозначно соответствует одному второму вращательному состоянию;
управление первым двигателем 9 с обеспечением его вращения его в соответствующем первом вращательном состоянии так, чтобы первая резьбовая штанга 65 наружной муфты каждого из первых исполнительных механизмов 8 удлинялась, укорачивалась или оставалась неизменной при вращении соответствующего первого двигателя 9, чтобы приводить стационарную тарелку 11 автомата перекоса нижнего несущего винта в системе приведения во вращение нижнего несущего винта к наклону в определенном направлении и, таким образом, приводить в движение вращающуюся тарелку 24 автомата перекоса нижнего несущего винта, по меньшей мере две нижних тяговых штанги 35 наклонного плеча и по меньшей мере два наклонных плеча 13 зажима лопасти нижнего несущего винта, обеспечивая возможность закручивания зажимных элементов первой лопасти относительно втулки 14 нижнего несущего винта; причем, каждый из первых исполнительных механизмов 8 содержит корпус; при этом первая резьбовая штанга 65 наружной муфты может телескопически выдвигаться и задвигаться, при этом один ее конец находится в корпусе, а конец каждой из первых резьбовых штанг 65 наружной муфты, который выступает из корпуса, соединен со стационарной тарелкой 11 автомата перекоса нижнего несущего винта; вращающаяся тарелка 24 автомата перекоса нижнего несущего винта посажена на стационарную тарелку 11 автомата перекоса нижнего несущего винта, при этом стационарная тарелка 11 автомата перекоса нижнего несущего винта соединена с вращающейся тарелкой 24 автомата перекоса нижнего несущего винта через подшипник 57 скольжения нижнего несущего винта, при этом вращающаяся тарелка 24 автомата перекоса нижнего несущего винта и вращающаяся тарелка 11 автомата перекоса нижнего несущего винта могут вращаться независимо друг от друга; один конец каждого из наклонных плеч 13 зажима лопасти нижнего несущего винта закреплен на заданной монтажной поверхности соответствующего зажимного элемента первой лопасти; один конец каждой из тяговых штанг 35 наклонного плеча соединен с другим концом соответствующего наклонного плеча 13 зажима лопасти нижнего несущего винта; вращающаяся тарелка 24 автомата перекоса нижнего несущего винта соединена с другим концом каждой из тяговых штанг 35 наклонного плеча;
управляют вторым двигателем 49, чтобы обеспечивать его вращение в соответствующем втором вращательном состоянии так, чтобы вторая резьбовая штанга 28 наружной муфты каждого из вторых исполнительных механизмов 58 удлинялась, укорачивалась или оставалась неизменной при вращении соответствующего второго двигателя 49, чтобы приводить стационарную тарелку 3 автомата перекоса верхнего несущего винта в системе приведения во вращение верхнего несущего винта к наклону в определенном направлении и, таким образом, приводить в движение вращающуюся тарелку 4 автомата перекоса верхнего несущего винта, по меньшей мере две L-образные рулевые штанги 47 верхнего несущего винта, по меньшей мере две нижние рулевые штанги 45 верхнего несущего винта, по меньшей мере две тяговых штанги 56 внутри внутреннего вала 15, по меньшей мере две верхние рулевые штанги 40 верхнего несущего винта, по меньшей мере две верхние тяговые штанги 41 наклонного плеча и по меньшей мере два наклонных плеча 42 зажима лопасти верхнего несущего винта, обеспечивая возможность закручивания зажимных элементов второй лопасти относительно втулки 16 верхнего несущего винта; причем каждый из вторых исполнительных механизмов 58 содержит корпус; при этом вторая резьбовая штанга 28 наружной муфты может телескопически выдвигаться и задвигаться, при этом один ее конец находится в корпусе, а конец каждой из вторых резьбовых штанг 28 наружной муфты, который выступает из корпуса, соединен со стационарной тарелкой 3 автомата перекоса верхнего несущего винта; стационарная тарелка 3 автомата перекоса верхнего несущего винта соединена с вращающейся тарелкой 4 автомата перекоса верхнего несущего винта, при этом вращающаяся тарелка 4 автомата перекоса верхнего несущего винта и стационарная тарелка 3 автомата перекоса верхнего несущего винта могут вращаться независимо друг от друга; один конец каждого из наклонных плеч 42 зажима лопасти верхнего несущего винта закреплен на заданной монтажной поверхности соответствующего зажимного элемента второй лопасти; при этом один конец каждой из тяговых штанг 41 наклонного плеча соединен с другим концом соответствующего наклонного плеча 42 зажима лопасти верхнего несущего винта; один конец каждой из верхних рулевых штанг 40 верхнего несущего винта соединен с другим концом соответствующей верхней тяговой штанги 41 наклонного плеча; верхняя тяговая втулка 39, соединенная с другим концом каждой из верхних рулевых штанг 40 верхнего несущего винта; один конец каждой из тяговых штанг 56 соединен с соответствующей верхней рулевой штангой 40 верхнего несущего винта через верхнюю тяговую втулку 39; один конец нижней тяговой втулки 64 соединен с другим концом тяговой штанги 56; один конец каждой из нижних рулевых штанг 45 верхнего несущего винта соединен с нижней тяговой втулкой 64 и также соединен с другим концом соответствующей тяговой штанги 56 через нижнюю тяговую втулку 64; один конец каждой из L-образных рулевых штанг 47 верхнего несущего винта соединен с другим концом соответствующей нижней рулевой штанги 45 верхнего несущего винта; вращающаяся тарелка 4 автомата перекоса верхнего несущего винта соединена с другим концом L-образной рулевой штанги 47 верхнего несущего винта;
причем вращение втулки 14 нижнего несущего винта вместе с наружным валом 19 приводит во вращение вращающуюся тарелку 24 автомата перекоса нижнего несущего винта за счет действия по меньшей мере двух блоков управления нижним несущим винтом в системе приведения во вращение нижнего несущего винта; вращение втулки 16 верхнего несущего винта вместе с внутренним валом 15 приводит во вращение вращающуюся тарелку 4 автомата перекоса верхнего несущего винта за счет действия L-образных рулевых штанг 47 верхнего несущего винта и нижних рулевых штанг 45 верхнего несущего винта; причем один конец каждого из блоков управления нижним несущим винтом закреплен на втулке 14 нижнего несущего винта, а другой конец закреплен на вращающейся тарелке 24 автомата перекоса нижнего несущего винта;
стационарная тарелка 11 автомата перекоса нижнего несущего винта не может поворачиваться вместе с вращающейся тарелкой 24 автомата перекоса нижнего несущего винта из-за действия первой антиротационной стойки 25 и первого ползуна 44 в системе приведения во вращение нижнего несущего винта; стационарная тарелка 3 автомата перекоса верхнего несущего винта не может поворачиваться вместе с вращающейся тарелкой 4 автомата перекоса верхнего несущего винта из-за действия второй антиротационной стойки 29 и второго ползуна 30 в системе приведения во вращение верхнего несущего винта; при этом один конец первой антиротационной стойки 25 закреплен на верхней крышке 26, а другой конец снабжен сквозным отверстием, при этом первый ползун 44 расположен на стационарной тарелке 11 автомата перекоса нижнего несущего винта и проникает в сквозное отверстие первой антиротационной стойки 25; один конец второй антиротационной стойки 29 закреплен на монтажной плите 2 исполнительных механизмов, а другой конец снабжен сквозным отверстием, при этом второй ползун 30 расположен на стационарной тарелке 3 автомата перекоса верхнего несущего винта и проникает в сквозное отверстие второй антиротационной стойки 29.
Предпочтительно, командами на управление полетом могут быть:
команда на отрыв, команда на зависание, команда «вперед», команда на реверс, команда «лево руля» или команда «право руля».
Предпочтительно, шаг определения требуемых первых вращательных состояний первых двигателей 9 в соответствии с командой на управление полетом и текущими вращательными состояниями первых двигателей 9 может содержать:
определение текущего угла закручивания, на который повернут каждый из зажимных элементов первой лопасти относительно втулки 14 нижнего несущего винта, в соответствии с текущими вращательными состояниями первых двигателей 9; причем каждый из зажимных элементов первой лопасти однозначно соответствует одному текущему углу закручивания;
определение требуемого первого угла закручивания, на который повернут каждый из зажимных элементов первой лопасти относительно втулки 14 нижнего несущего винта в соответствии с командой на управление полетом и текущим углом закручивания, на который повернут каждый из зажимных элементов первой лопасти относительно втулки 14 нижнего несущего винта; причем каждый из зажимных элементов первой лопасти однозначно соответствует одному первому углу закручивания; и
определение требуемого первого вращательного состояния каждого из первых двигателей 9 в соответствии с требуемым первым углом закручивания, на который повернут каждый из зажимных элементов первой лопасти относительно втулки 14 нижнего несущего винта.
Соответственно, шаг определения требуемых вторых вращательных состояний вторых двигателей 49 в соответствии с командой на управление полетом и текущими вращательными состояниями вторых двигателей 49 может содержать:
определение текущего угла закручивания, на который повернут каждый из зажимных элементов второй лопасти относительно втулки 16 верхнего несущего винта, в соответствии с текущими вращательными состояниями вторых двигателей 49; причем каждый из зажимных элементов второй лопасти однозначно соответствует одному текущему углу закручивания;
определение требуемого второго угла закручивания, на который повернут каждый из зажимных элементов второй лопасти относительно втулки 16 верхнего несущего винта в соответствии с командой на управление полетом и текущим углом закручивания, на который повернут каждый из зажимных элементов второй лопасти относительно втулки 16 верхнего несущего винта; причем каждый из зажимных элементов второй лопасти однозначно соответствует одному второму углу закручивания; и
определение требуемого второго вращательного состояния каждого из вторых двигателей 49 в соответствии с требуемым вторым углом закручивания, на который повернут каждый из зажимных элементов второй лопасти относительно втулки 16 верхнего несущего винта.
Предпочтительно, команда на управление полетом отправляется с помощью устройства дистанционного управления.
Предпочтительно, команда на управление полетом отправляется через наземную станцию управления.
Во втором аспекте варианты осуществления настоящего изобретения обеспечивают устройство для приведения во вращение несущего винта, которое применимо к двухвинтовому соосному автономному вертолету, при этом двухвинтовой соосный автономный вертолет содержит:
наружный вал 19;
втулку 14 нижнего несущего винта, закрепленную на внешней стороне одного из концов наружного вала 19;
по меньшей мере два зажимных элемента первой лопасти, соединенных с втулкой 14 нижнего несущего винта, причем каждый из зажимных элементов первой лопасти может быть закручен относительно втулки 14 нижнего несущего винта и содержит первый зажим 20 лопасти и второй зажим 22 лопасти, причем первый зажим 20 лопасти и второй зажим 22 лопасти совместно зажимают лопасть нижнего несущего винта;
внутренний вал 15;
втулку 16 верхнего несущего винта, закрепленную на внешней стороне одного из концов внутреннего вала 15;
по меньшей мере два зажимных элемента второй лопасти, соединенных с втулкой 16 верхнего несущего винта, причем каждый из зажимных элементов второй лопасти может быть закручен относительно втулки 16 верхнего несущего винта и содержит третий зажим 17 лопасти и четвертый зажим 18 лопасти, причем третий зажим 17 лопасти и четвертый зажим 18 лопасти совместно зажимают лопасть верхнего несущего винта;
коробку, вмещающую зубчатую передачу и содержащую верхнюю крышку 26, корпус 27 коробки и нижнюю крышку 1, причем зубчатая передача соединена с наружным валом 19 и внутренним валом 15;
синхронный шкив 7, соединенный с зубчатой передачей, причем вращение синхронного шкива 7 приводит во вращение зубчатую передачу таким образом, чтобы привести во вращение наружный вал 19 и внутренний вал 15, и причем наружный вал (19) вращается в противоположном направлении по отношению к внутреннему валу (15), втулка 14 нижнего несущего винта неподвижна относительно наружного вала 19, а втулка 16 верхнего несущего винта неподвижна относительно внутреннего вала 15;
систему приведения во вращение несущих винтов, содержащую систему приведения во вращение верхнего несущего винта и систему приведения во вращение нижнего несущего винта.
Устройство для приведения во вращение несущего винта может содержать:
модуль приема команд для приема команды на управление полетом;
модуль получения текущих состояний для получения текущих вращательных состояний первых двигателей 9, соответствующих по меньшей мере трем первым исполнительным механизмам 8 в системе приведения во вращение нижнего несущего винта и текущих вращательных состояний вторых двигателей 49, соответствующих по меньшей мере трем вторым исполнительным механизмам 58 в системе приведения во вращение верхнего несущего винта; при этом каждый из первых исполнительных механизмов 8 однозначно соответствует одному первому двигателю 9, каждый из вторых исполнительных механизмов 58 однозначно соответствует одному второму двигателю 59, при этом каждый из первых двигателей 9 однозначно соответствует одному текущему вращательному состоянию, каждый из вторых двигателей 49 однозначно соответствует одному текущему вращательному состоянию;
модуль определения первых вращательных состояний для определения требуемых первых вращательных состояний первых двигателей 9 в соответствии с командой на управление полетом и текущими вращательными состояниями первых двигателей 9; причем каждый из первых двигателей 9 однозначно соответствует одному первому вращательному состоянию;
модуль определения вторых вращательных состояний для определения требуемых вторых вращательных состояний вторых двигателей 49 в соответствии с командой на управление полетом и текущими вращательными состояниями вторых двигателей 49; причем каждый из вторых двигателей 49 однозначно соответствует одному второму вращательному состоянию;
первый модуль управления для управления первым двигателем 9 с обеспечением его вращения в соответствующем первом вращательном состоянии так, что первая резьбовая штанга 65 наружной муфты каждого из первых исполнительных механизмов 8 удлиняется, укорачивается или остается неизменной при вращении соответствующего первого двигателя 9, чтобы приводить стационарную тарелку 11 автомата перекоса нижнего несущего винта в системе приведения во вращение нижнего несущего винта к наклону в определенном направлении и, таким образом, приводить в движение вращающуюся тарелку 24 автомата перекоса нижнего несущего винта, по меньшей мере две нижних тяговых штанги 35 наклонного плеча и по меньшей мере два наклонных плеча 13 зажима лопасти нижнего несущего винта, обеспечивая возможность закручивания зажимных элементов первой лопасти относительно втулки 14 нижнего несущего винта; причем каждый из первых исполнительных механизмов 8 содержит корпус; при этом первая резьбовая штанга 65 наружной муфты может телескопически выдвигаться и задвигаться, при этом один ее конец находится в корпусе, а конец каждой из первых резьбовых штанг 65 наружной муфты, который выступает из корпуса, соединен со стационарной тарелкой 11 автомата перекоса нижнего несущего винта; вращающаяся тарелка 24 автомата перекоса нижнего несущего винта посажена на стационарную тарелку 11 автомата перекоса нижнего несущего винта, при этом стационарная тарелка 11 автомата перекоса нижнего несущего винта соединена с вращающейся тарелкой 24 автомата перекоса нижнего несущего винта через подшипник 57 скольжения нижнего несущего винта, при этом вращающаяся тарелка 24 автомата перекоса нижнего несущего винта и вращающаяся тарелка 11 автомата перекоса нижнего несущего винта могут вращаться независимо друг от друга; один конец каждого из наклонных плеч 13 зажима лопасти нижнего несущего винта закреплен на заданной монтажной поверхности соответствующего зажимного элемента первой лопасти; один конец каждой из тяговых штанг 35 наклонного плеча соединен с другим концом соответствующего наклонного плеча 13 зажима лопасти нижнего несущего винта; вращающаяся тарелка 24 автомата перекоса нижнего несущего винта соединена с другим концом каждой из тяговых штанг 35 наклонного плеча;
второй модуль управления для управления вторым двигателем 49, чтобы вращать его в соответствующем втором вращательном состоянии так, что вторая резьбовая штанга 28 наружной муфты каждого из вторых исполнительных механизмов 58 удлиняется, укорачивается или остается неизменной при вращении соответствующего второго двигателя 49 так, чтобы приводить стационарную тарелку 3 автомата перекоса верхнего несущего винта в системе приведения во вращение верхнего несущего винта к наклону в определенном направлении и, таким образом, приводить в движение вращающуюся тарелку 4 автомата перекоса верхнего несущего винта, по меньшей мере две L-образные рулевые штанги 47 верхнего несущего винта, по меньшей мере две нижние рулевые штанги 45 верхнего несущего винта, по меньшей мере две тяговых штанги 56 внутри внутреннего вала 15, по меньшей мере две верхние рулевые штанги 40 верхнего несущего винта, по меньшей мере две верхние тяговые штанги 41 наклонного плеча и по меньшей мере два наклонных плеча 42 зажима лопасти верхнего несущего винта, обеспечивая возможность закручивания зажимных элементов второй лопасти относительно втулки 16 верхнего несущего винта; причем, каждый из вторых исполнительных механизмов 58 содержит корпус; при этом вторая резьбовая штанга 28 наружной муфты может телескопически выдвигаться и задвигаться, при этом один ее конец находится в корпусе, а конец каждой из вторых резьбовых штанг 28 наружной муфты, который выступает из корпуса, соединен со стационарной тарелкой 3 автомата перекоса верхнего несущего винта; стационарная тарелка 3 автомата перекоса верхнего несущего винта соединена с вращающейся тарелкой 4 автомата перекоса верхнего несущего винта, при этом вращающаяся тарелка 4 автомата перекоса верхнего несущего винта и стационарная тарелка 3 автомата перекоса верхнего несущего винта могут вращаться независимо друг от друга; один конец каждого из наклонных плеч 42 зажима лопасти верхнего несущего винта закреплен на заданной монтажной поверхности соответствующего зажимного элемента второй лопасти; при этом один конец каждой из тяговых штанг 41 наклонного плеча соединен с другим концом соответствующего наклонного плеча 42 зажима лопасти верхнего несущего винта; один конец каждой из верхних рулевых штанг 40 верхнего несущего винта соединен с другим концом соответствующей верхней тяговой штанги 41 наклонного плеча; верхняя тяговая втулка 39, соединенная с другим концом каждой из верхних рулевых штанг 40 верхнего несущего винта; один конец каждой из тяговых штанг 56 соединен с соответствующей верхней рулевой штангой 40 верхнего несущего винта через верхнюю тяговую втулку 39; один конец нижней тяговой втулки 64 соединен с другим концом тяговой штанги 56; один конец каждой из нижних рулевых штанг 45 верхнего несущего винта соединен с нижней тяговой втулкой 64 и также соединен с другим концом соответствующей тяговой штанги 56 через нижнюю тяговую втулку 64; один конец каждой из L-образных рулевых штанг 47 верхнего несущего винта соединен с другим концом соответствующей нижней рулевой штанги 45 верхнего несущего винта; вращающаяся тарелка 4 автомата перекоса верхнего несущего винта соединена с другим концом L-образной рулевой штанги 47 верхнего несущего винта;
причем, за счет действия по меньшей мере двух блоков управления нижним несущим винтом в системе приведения во вращение нижнего несущего винта, вращение втулки 14 нижнего несущего винта вместе с наружным валом 19 приводит во вращение вращающуюся тарелку 24 автомата перекоса нижнего несущего винта; за счет действия L-образных рулевых штанг 47 верхнего несущего винта и нижних рулевых штанг 45 верхнего несущего винта, вращение втулки 16 верхнего несущего винта вместе с внутренним валом 15 приводит во вращение вращающуюся тарелку 4 автомата перекоса верхнего несущего винта; при этом один конец каждого из блоков управления нижним несущим винтом закреплен на втулке 14 нижнего несущего винта, а другой конец закреплен на вращающейся тарелке 24 автомата перекоса нижнего несущего винта;
стационарная тарелка 11 автомата перекоса нижнего несущего винта не может поворачиваться вместе с вращающейся тарелкой 24 автомата перекоса нижнего несущего винта из-за действия первой антиротационной стойки 25 и первого ползуна 44 в системе приведения во вращение нижнего несущего винта; стационарная тарелка 3 автомата перекоса верхнего несущего винта не может поворачиваться вместе с вращающейся тарелкой 4 автомата перекоса верхнего несущего винта из-за действия второй антиротационной стойки 29 и второго ползуна 30 в системе приведения во вращение верхнего несущего винта; при этом, один конец первой антиротационной стойки 25 закреплен на верхней крышке 26, а другой конец снабжен сквозным отверстием, при этом первый ползун 44 расположен на стационарной тарелке 11 автомата перекоса нижнего несущего винта и проникает в сквозное отверстие первой антиротационной стойки 25; один конец второй антиротационной стойки 29 закреплен на монтажной плите 2 исполнительных механизмов, а другой конец снабжен сквозным отверстием, при этом, второй ползун 30 расположен на стационарной тарелке 3 автомата перекоса верхнего несущего винта и проникает в сквозное отверстие второй антиротационной стойки 29.
Предпочтительно, модуль определения первых вращательных состояний может содержать:
блок определения текущих углов закручивания для определения текущего угла закручивания, на который повернут каждый из зажимных элементов первой лопасти относительно втулки 14 нижнего несущего винта, в соответствии с текущими вращательными состояниями первых двигателей 9; причем каждый из зажимных элементов первой лопасти однозначно соответствует одному текущему углу закручивания;
блок определения первых углов закручивания для определения требуемого первого угла закручивания, на который повернут каждый из зажимных элементов первой лопасти относительно втулки 14 нижнего несущего винта в соответствии с командой на управление полетом и текущим углом закручивания, на который повернут каждый из зажимных элементов первой лопасти относительно втулки 14 нижнего несущего винта; причем каждый из зажимных элементов первой лопасти однозначно соответствует первому текущему углу закручивания; и
блок определения первых вращательных состояний для определения требуемого первого вращательного состояния каждого из первых двигателей 9 в соответствии с требуемым первым углом закручивания, на который повернут каждый из зажимных элементов первой лопасти относительно втулки 14 нижнего несущего винта.
Соответственно, модуль определения вторых вращательных состояний может содержать:
блок определения текущих углов закручивания для определения текущего угла закручивания, на который повернут каждый из зажимных элементов второй лопасти относительно втулки 16 верхнего несущего винта, в соответствии с текущими вращательными состояниями вторых двигателей 49; причем каждый из зажимных элементов второй лопасти однозначно соответствует одному текущему углу закручивания;
блок определения вторых углов закручивания для определения требуемого второго угла закручивания, на который повернут каждый из зажимных элементов второй лопасти относительно втулки 16 верхнего несущего винта в соответствии с командой на управление полетом и текущим углом закручивания, на который повернут каждый из зажимных элементов второй лопасти относительно втулки 16 верхнего несущего винта; причем каждый из зажимных элементов второй лопасти однозначно соответствует одному второму углу закручивания; и
блок определения вторых вращательных состояний для определения требуемого второго вращательного состояния каждого из вторых двигателей 49 в соответствии с требуемым вторым углом закручивания, на который повернут каждый из зажимных элементов второй лопасти относительно втулки 16 верхнего несущего винта.
В одном из вариантов осуществления настоящего изобретения, способ приведения во вращение несущего винта может содержать: прием команды на управление полетом, получение текущих вращательных состояний первых двигателей 9, соответствующих по меньшей мере трем первым исполнительным механизмам 8 и текущих вращательных состояний вторых двигателей 49, соответствующих по меньшей мере трем вторым исполнительным механизмам 58; определение требуемых первых вращательных состояний первых двигателей 9 в соответствии с командой на управление полетом и текущими вращательными состояниями первых двигателей 9; определение требуемых вторых вращательных состояний вторых двигателей 49 в соответствии с командой на управление полетом и текущими вращательными состояниями вторых двигателей 49; управление первым двигателем 9 с обеспечением его вращения в соответствующем первом вращательном состоянии так, чтобы первая резьбовая штанга 65 наружной муфты каждого из первых исполнительных механизмов 8 удлинялась, укорачивалась или остается неизменной при вращении соответствующего первого двигателя 9, чтобы приводить стационарную тарелку 11 автомата перекоса нижнего несущего винта к наклону в определенном направлении и, таким образом, приводить в движение вращающуюся тарелку 24 автомата перекоса нижнего несущего винта, по меньшей мере две нижних тяговых штанги 35 наклонного плеча и по меньшей мере два наклонных плеча 13 зажима лопасти нижнего несущего винта, обеспечивая возможность закручивания зажимных элементов первой лопасти относительно втулки 14 нижнего несущего винта; управление вторым двигателем 49 с обеспечением его вращения в соответствующем втором вращательном состоянии так, чтобы вторая резьбовая штанга 28 наружной муфты каждого из вторых исполнительных механизмов 58 удлинялась, укорачивалась или оставалась неизменной при вращении соответствующего второго двигателя 49, чтобы приводить стационарную тарелку 3 автомата перекоса верхнего несущего винта к наклону в определенном направлении и, таким образом, приводить в движение вращающуюся тарелку 4 автомата перекоса верхнего несущего винта, по меньшей мере две L-образные рулевые штанги 47 верхнего несущего винта, по меньшей мере две нижние рулевые штанги 45 верхнего несущего винта, по меньшей мере две тяговых штанги 56 внутри внутреннего вала 15, по меньшей мере две верхние рулевые штанги 40 верхнего несущего винта, по меньшей мере две верхние тяговые штанги 41 наклонного плеча и по меньшей мере два наклонных плеча 42 зажима лопасти верхнего несущего винта, обеспечивая возможность закручивания зажимных элементов второй лопасти относительно втулки 16 верхнего несущего винта. Таким образом, с помощью способа приведения во вращение несущего винта, предоставляемого вариантами осуществления настоящего изобретения, различные компоненты, расположенные между резьбовой штангой наружной муфты и зажимным элементом лопасти, могут работать совместно за счет управления поворотным углом несущих винтов, чтобы контролировать удлинение и укорочение резьбовой штанги наружной муфты в исполнительном механизме, с которым соединен несущий винт так, чтобы скомпоновать различные элементы, расположенные между резьбовой штангой наружной муфты и зажимным элементом лопасти, для придания закручивания зажимному элементу лопасти относительно втулки, позволяя тем самым уменьшить сложность процесса приведения во вращение несущего винта и преодолеть недостатки сложного процесса приведения во вращение существующих способов, применяемых в системах приведения во вращение несущего винта.
Краткое описание чертежей
Теперь, для более четкого раскрытия вариантов осуществления настоящего изобретения или технических решений в уровне техники, кратко опишем чертежи, используемые для раскрытия вариантов осуществления настоящего изобретения или уровня техники. Очевидно, что приведенные ниже чертежи предназначены только для некоторых вариантов осуществления настоящего изобретения, и специалисты в данной области могут без особых усилий получить дополнительные чертежи на основе чертежей, представленных здесь.
Фиг. 1 является видом спереди системы приведения во вращение несущего винта в двухвинтовом соосном автономном вертолете, в которой применим способ приведения во вращение несущего винта в соответствии с одним из вариантов осуществления настоящего изобретения.
Фиг. 2 является видом сверху системы приведения во вращение несущего винта в двухвинтовом соосном автономном вертолете, в которой применим способ приведения во вращение несущего винта в соответствии с одним из вариантов осуществления настоящего изобретения.
Фиг. 3 является видом слева системы приведения во вращение несущего винта в двухвинтовом соосном автономном вертолете, в которой применим способ приведения во вращение несущего винта в соответствии с одним из вариантов осуществления настоящего изобретения.
фиг. 4 является видом сзади системы приведения во вращение несущего винта в двухвинтовом соосном автономном вертолете, в которой применим способ приведения во вращение несущего винта в соответствии с одним из вариантов осуществления настоящего изобретения.
фиг. 5 является видом снизу системы приведения во вращение несущего винта в двухвинтовом соосном автономном вертолете, в которой применим способ приведения во вращение несущего винта в соответствии с одним из вариантов осуществления настоящего изобретения.
Фиг. 6 является видом справа системы приведения во вращение несущего винта в двухвинтовом соосном автономном вертолете, в которой применим способ приведения во вращение несущего винта в соответствии с одним из вариантов осуществления настоящего изобретения.
Фиг. 7 является полным разрезом вида спереди системы приведения во вращение несущего винта в двухвинтовом соосном автономном вертолете, в которой применим способ приведения во вращение несущего винта в соответствии с одним из вариантов осуществления настоящего изобретения.
Фиг. 8 является первой блок-схемой способа приведения во вращение несущего винта, предоставляемого одним из вариантов осуществления настоящего изобретения.
Фиг. 9 является второй блок-схемой способа приведения во вращение несущего винта, предоставляемого одним из вариантов осуществления настоящего изобретения.
Фиг. 10 является третьей блок-схемой способа приведения во вращение несущего винта, предоставляемого одним из вариантов осуществления настоящего изобретения.
Фиг. 11 является принципиальной схемой способа приведения во вращение несущего винта, предоставляемого одним из вариантов осуществления настоящего изобретения.
Подробное раскрытие изобретения
Далее настоящее изобретение будет раскрыто подробно со ссылками на чертежи и варианты осуществления с тем, чтобы сделать более четкими и легкими для понимания объекты, технические решения и эффект от настоящего изобретения. Очевидно, что раскрытые здесь варианты осуществления являются только частью вариантов осуществления, а не всеми вариантами осуществления настоящего изобретения. Все остальные варианты осуществления, которые могут быть получены обычными специалистами в данной области без каких-либо творческих усилий на основе раскрытых вариантов осуществления настоящего изобретения, попадают в объем правовой охраны настоящего изобретения.
Для преодоления недостатков сложного процесса приведения во вращение, присутствующего в способах существующих систем приведения во вращение несущего винта, варианты осуществления настоящего изобретения предоставляют способ и устройство для приведения во вращение несущего винта.
Следует отметить, что способ приведения во вращение несущего винта, предоставленный вариантами осуществления настоящего изобретения, применим в двухвинтовом соосном автономном вертолете.
Для более четкого раскрытия изобретения, вначале, со ссылками на фиг. 1 - фиг. 7, будет представлен двухвинтовой соосный автономный вертолет, в котором применим способ приведения во вращение несущего винта, предоставляемый вариантами осуществления настоящего изобретения. Фиг. 1 является видом спереди системы приведения во вращение несущего винта в данном двухвинтовом соосном автономном вертолете; фиг. 2 - вид сверху системы приведения во вращение несущего винта в данном двухвинтовом соосном автономном вертолете; фиг. 3 - вид слева системы приведения во вращение несущего винта в данном двухвинтовом соосном автономном вертолете; фиг. 4 - вид сзади системы приведения во вращение несущего винта в данном двухвинтовом соосном автономном вертолете; фиг. 5 - вид снизу системы приведения во вращение несущего винта в данном двухвинтовом соосном автономном вертолете; фиг. 6 - вид справа системы приведения во вращение несущего винта в данном двухвинтовом соосном автономном вертолете; и фиг. 7 - полный разрез вида спереди системы приведения во вращение несущего винта в данном двухвинтовом соосном автономном вертолете, в котором его плоскость сечения проходит через продольную ось внутреннего вала, перпендикулярна плоскости бумаги и проецируется влево.
Как показано на фиг. 1 - фиг. 7, данный двухвинтовой соосный автономный вертолет может содержать:
наружный вал 19;
втулку 14 нижнего несущего винта, закрепленную на внешней стороне одного из концов наружного вала 19;
по меньшей мере два зажимных элемента первой лопасти, соединенных с втулкой 14 нижнего несущего винта, причем каждый из зажимных элементов первой лопасти может быть закручен относительно втулки 14 нижнего несущего винта и содержит первый зажим 20 лопасти и второй зажим 22 лопасти, причем первый зажим 20 лопасти и второй зажим 22 лопасти совместно зажимают лопасть нижнего несущего винта;
внутренний вал 15;
втулку 16 верхнего несущего винта, закрепленную на внешней стороне одного из концов внутреннего вала 15;
по меньшей мере два зажимных элемента второй лопасти, соединенных с втулкой 16 верхнего несущего винта, причем каждый из зажимных элементов второй лопасти может быть закручен относительно втулки 16 верхнего несущего винта и содержит третий зажим 17 лопасти и четвертый зажим 18 лопасти, причем третий зажим 17 лопасти и четвертый зажим 18 лопасти совместно зажимают лопасть верхнего несущего винта;
коробку, содержащую верхнюю крышку 26, корпус 27 коробки и нижнюю крышку 1, причем зубчатая передача соединена с наружным валом 19 и внутренним валом 15;
синхронный шкив 7, соединенный с зубчатой передачей, причем вращение синхронного шкива 7 приводит во вращение зубчатую передачу таким образом, чтобы привести во вращение наружный вал 19 и внутренний вал 15, и причем внутренний вал 15 вращается в противоположном направлении по отношению к наружному валу 19, втулка 14 нижнего несущего винта неподвижна относительно наружного вала 19, а втулка 16 верхнего несущего винта неподвижна относительно внутреннего вала 15;
система приведения во вращение несущего винта может содержать систему приведения во вращение нижнего несущего винта и систему приведения во вращение верхнего несущего винта;
при этом, система приведения во вращение нижнего несущего винта может содержать:
по меньшей мере два наклонных плеча 13 зажима лопасти нижнего несущего винта, один конец каждого из которых закреплен на заданной монтажной поверхности соответствующего зажимного элемента первой лопасти; причем каждое из наклонных плеч 13 зажима лопасти нижнего несущего винта однозначно соответствует одному зажимному элементу первой лопасти;
по меньшей мере две нижних тяговых штанги 35 наклонного плеча, один конец каждой из которых соединен с другим концом соответствующего наклонного плеча 13 зажима лопасти нижнего несущего винта; причем каждая из нижних тяговых штанг 35 наклонного плеча однозначно соответствует одному наклонному плечу 13 зажима лопасти нижнего несущего винта;
опорную стойку 10, которая посажена на наружный вал 19, при этом один конец закреплен на верхней крышке 26; причем внутренняя стенка опорной стойки 10 распложена на определенном расстоянии от наружной стенки наружного вала 19 таким образом, что опорная стойка 10 не препятствует вращению наружного вала 19.
вращающуюся тарелку 24 автомата перекоса нижнего несущего винта, которая посажена на стационарную тарелку 11 автомата перекоса нижнего несущего винта и соединена с другим концом каждой из тяговых штанг 35 наклонного плеча; причем вращающаяся тарелка 24 автомата перекоса нижнего несущего винта может вращаться относительно опорной стойки 10;
по меньшей мере два блока управления нижним несущим винтом, один конец каждого из которых соединен с втулкой 14 нижнего несущего винта, а другой конец соединен с вращающейся тарелкой 24 автомата перекоса нижнего несущего винта так, чтобы приводить во вращение вращающуюся тарелку 24 автомата перекоса, когда втулка 14 нижнего несущего винта вращается вместе с наружным валом 19;
стационарную тарелку 11 автомата перекоса нижнего несущего винта, которая посажена на опорную стойку 10, подшипник 57 скольжения нижнего несущего винта и соединенная с вращающейся тарелкой 24 автомата перекоса нижнего несущего винта через подшипник 57 скольжения нижнего несущего винта, при этом вращающаяся тарелка 24 автомата перекоса нижнего несущего винта и стационарная тарелка 11 автомата перекоса нижнего несущего винта могут вращаться независимо друг от друга; причем стационарная тарелка 11 автомата перекоса нижнего несущего винта может вращаться относительно опорной стойки 10;
монтажную плиту 2 исполнительных механизмов, которая жестко соединена с нижней крышкой посредством соединения;
по меньшей мере три первых исполнительных механизма, установленных на монтажной плите 2 исполнительных механизмов, причем каждый из первых исполнительных механизмов 8 может содержать корпус и первые резьбовые штанги 65 наружной муфты, которые могут телескопически выдвигаться и задвигаться, при этом один конец находится в корпусе, и конец каждой первой резьбовой штанги 65 наружной муфты, который выступает из корпуса, соединен со стационарной тарелкой 11 автомата перекоса нижнего несущего винта так, чтобы приводить в действие стационарную тарелку 11 автомата перекоса нижнего несущего винта и наклонять вращающуюся тарелку 24 автомата перекоса нижнего несущего винта в определенном направлении, когда первая резьбовая штанга 65 наружной муфты телескопически выдвигается и задвигается; причем стационарная тарелка 11 автомата перекоса нижнего несущего винта может наклоняться в определенном направлении при различных длинах выдвижения, по меньшей мере трех первых резьбовых штанг 65 наружной муфты;
по меньшей мере три первых двигателя 9, каждый из которых соединен с соответствующим первым исполнительным механизмом 8 и управляет его телескопическим выдвижением и задвиганием.
первую антиротационную стойку 25, один конец которой закреплен в месте отличном от места расположения верхней крышки 26, на которой расположена опорная стойка 10, а другой конец снабжен сквозным отверстием;
первый ползун 44, который расположен на стационарной тарелке 11 автомата перекоса нижнего несущего винта и проникает в сквозное отверстие первой антиротационной стойки 25 так, чтобы стационарная тарелка 11 автомата перекоса нижнего несущего винта могла наклоняться в определенном направлении, но не вращаться вместе с вращающейся тарелкой 24 автомата перекоса нижнего несущего винта;
при этом, система приведения во вращение верхнего несущего винта может содержать:
по меньшей мере два наклонных плеча 42 зажима лопасти верхнего несущего винта, один конец каждого из которых закреплен на заданной монтажной поверхности соответствующего зажимного элемента второй лопасти; причем каждое из наклонных плеч 42 зажима лопасти верхнего несущего винта однозначно соответствует одному зажимному элементу второй лопасти;
по меньшей мере две верхние тяговые штанги 41 наклонного плеча, один конец каждой из которых соединен с другим концом соответствующего наклонного плеча 42 зажима лопасти верхнего несущего винта; причем каждая из верхних тяговых штанг 41 наклонного плеча однозначно соответствует одному наклонному плечу 42 зажима лопасти верхнего несущего винта;
по меньшей мере две верхние рулевые штанги 40 верхнего несущего винта, один конец каждой из которых соединен с другим концом соответствующей верхней тяговой штанги 41 наклонного плеча; причем каждая из верхних рулевых штанг 40 верхнего несущего винта однозначно соответствует одной верхней тяговой штанге 41 наклонного плеча;
верхнюю тяговую втулку 39, которая соединена с другим концом каждой из верхних рулевых штанг 40 верхнего несущего винта;
по меньшей мере две тяговые штанги 56, которые расположены внутри внутреннего вала 15, один конец каждой из которых соединен с соответствующей верхней рулевой штангой 40 верхнего несущего винта через тяговую втулку 39; причем каждая из тяговых штанг 56 однозначно соответствует одной верхней рулевой штанге 40 верхнего несущего винта;
нижнюю тяговую втулку 64;
по меньшей мере две нижние рулевые штанги 45 верхнего несущего винта, один конец каждой из которых соединен с нижней тяговой втулкой 64, и соединен с другим концом соответствующей тяговой штанги 56 через нижнюю тяговую втулку 64; причем каждая из нижних рулевых штанг 45 верхнего несущего винта однозначно соответствует одной тяговой штанге 56;
по меньшей мере две L-образных рулевые штанги 47 верхнего несущего винта, один конец каждой из которых соединен с другим концом соответствующей нижней рулевой штангой 45 верхнего несущего винта; причем каждая из L-образных рулевых штанг 47 верхнего несущего винта однозначно соответствует одной нижней рулевой штанге 45 верхнего несущего винта;
подвижную штангу 46 тарелки автомата перекоса верхнего несущего винта;
вращающуюся тарелку 4 автомата перекоса верхнего несущего винта, которая посажена на подвижную штангу 46 тарелки автомата перекоса верхнего несущего винта через подшипник 59 скольжения и соединена с другим концом L-образной рулевой штанги 47 верхнего несущего винта таким образом, чтобы приводить во вращение вращающуюся тарелку 4 автомата перекоса верхнего несущего винта из-за действия L-образной рулевой штанги 47 верхнего несущего винта и нижней рулевой штанги 45 верхнего несущего винта при совместном вращении втулки 16 верхнего несущего винта и внутреннего вала 15; причем вращающаяся тарелка 4 автомата перекоса верхнего несущего винта может вращаться относительно подвижной штанги 46 тарелки автомата перекоса верхнего несущего винта;
стационарную тарелку 3 автомата перекоса верхнего несущего винта, которая посажена на вращающуюся тарелку 4 автомата перекоса верхнего несущего винта, при этом вращающаяся тарелка 4 автомата перекоса верхнего несущего винта и стационарная тарелка 3 автомата перекоса верхнего несущего винта могут вращаться независимо друг от друга; причем стационарная тарелка 3 автомата перекоса верхнего несущего винта может вращаться относительно подвижной штанги 46 тарелки автомата перекоса верхнего несущего винта;
по меньшей мере три вторых исполнительных механизма 58, которые установлены на верхней крышке 26, каждый из вторых исполнительных механизмов 58 может содержать корпус и вторую резьбовую штангу 28 наружной муфты может телескопически выдвигаться и задвигаться, при этом один конец находится в корпусе, а конец каждой второй резьбовой штанги 28 наружной муфты, который выступает из корпуса, соединен со стационарной тарелкой 3 автомата перекоса верхнего несущего винта так, чтобы приводить в действие стационарную тарелку 3 автомата перекоса верхнего несущего винта и таким образом наклонять в определенном направлении вращающуюся тарелку 4 автомата перекоса верхнего несущего винта при телескопическом выдвижении и задвигании резьбовой штанги 28 наружной муфты; причем стационарная тарелка 3 автомата перекоса верхнего несущего винта может наклоняться в определенном направлении при различных длинах выдвижения по меньшей мере трех вторых резьбовых штанг 28 наружной муфты;
по меньшей мере три вторых двигателя 49, каждый из которых соединен со второй резьбовой штангой 28 наружной муфты соответствующего второго исполнительного механизма 58 и управляет ее телескопическим выдвижением и задвиганием;
вторую антиротационную стойку 29, при этом один ее конец закреплен на монтажной плите 2 исполнительных механизмов, а другой конец снабжен сквозным отверстием;
второй ползун 30, который расположен на стационарной тарелке 3 автомата перекоса верхнего несущего винта и проникает в сквозное отверстие второй антиротационной стойки 29 так, чтобы стационарная тарелка 3 автомата перекоса верхнего несущего винта могла наклоняться в определенном направлении, но не вращаться вместе с вращающейся тарелкой 4 автомата перекоса верхнего несущего винта.
Здесь, под действием вала зажима лопасти, каждый из зажимных элементов первой лопасти может закручиваться относительно втулки 14 нижнего несущего винта, каждый из зажимных элементов второй лопасти может закручиваться относительно втулки 16 верхнего несущего винта; например, как показано на фиг. 7, вал 55 зажима лопасти расположен внутри зажимного элемента второй лопасти, обеспечивая возможность закручивания зажимного элемента второй лопасти относительно втулки 16 верхнего несущего винта.
Кроме того, в частности, выдвинутый конец 6 корпуса 27 коробки соединен с синхронным шкивом 7 таким образом, чтобы синхронный шкив 7 мог плавно вращаться под действием двигателя как силового агрегата в двухвинтовом соосном автономном вертолете без воздействия других элементов. Кроме того, расположенная в коробке зубчатая передача может содержать вал 52 конической шестерни, верхнюю коническую шестерню 54 и нижнюю коническую шестерню 50; причем синхронный шкив 7 соединен с валом 52 конической шестерни, который в свою очередь соединен соответственно с верхней конической шестерней 54 и нижней конической шестерней 50; при этом верхняя коническая шестерня 54 соединена с наружным валом 19, а нижняя коническая шестерня 50 соединена с внутренним валом 15. Кроме того, конструкция может содержать торцевую крышку 53 вала шестерни, которая расположена на выдвинутом конце 6 корпуса 27 коробки для определения осевого направления вала 52 конической шестерни.
Следует отметить, что блок управления нижним несущим винтом может быть образован двумя элементами, например, блок управления нижним несущим винтом может быть образован антиротационной тарелкой 21 и L-образной рулевой штангой 23 нижнего несущего винта, как показано на фиг. 3 и фиг. 6, причем один конец антиротационной тарелки 21 соединен с одним концом L-образной рулевой штанги 23 нижнего несущего винта, а другой конец антиротационной тарелки 21 соединен с втулкой 14 нижнего несущего винта, при этом другой конец L-образной рулевой штанги 23 нижнего несущего винта соединен с вращающейся тарелкой 24 автомата перекоса нижнего несущего винта. Конечно, специалистам в данной области понятно, что блок управления нижним несущим винтом может быть образован и одним элементом, причем один конец этого элемента соединен с втулкой 14 нижнего несущего винта, а другой конец соединен с вращающейся тарелкой 24 автомата перекоса нижнего несущего винта; в качестве альтернативы, также возможен вариант, когда блок управления нижним несущим винтом образован, по меньшей мере тремя элементами, которыми втулка 14 нижнего несущего винта и вращающаяся тарелка 24 автомата перекоса нижнего несущего винта соединены друг с другом.
Здесь, длина сквозного отверстия первой антиротационной стойки 25 должна обеспечивать плавный наклон стационарной тарелки 11 автомата перекоса нижнего несущего винта в определенном направлении; длина сквозного отверстия второй антиротационной стойки 29 должна обеспечивать плавный наклон стационарной тарелки 3 автомата перекоса верхнего несущего винта в определенном направлении.
Здесь, длины первого ползуна 44 и второго ползуна 30 могут устанавливаться в соответствии с реальными ситуациями. Например, первый ползун 44 может проникать в сквозное отверстие первой антиротационной стойки 25, но не выходить из сквозного отверстия; в качестве альтернативы, также возможен вариант, когда первый ползун 44 может проникать в сквозное отверстие первой антиротационной стойки 25 и выходить из него, при этом второй ползун 30 может проникать в сквозное отверстие второй антиротационной стойки 29, но не выходить из него; в качестве еще одной альтернативы, возможен вариант, когда второй ползун 30 может проникать в сквозное отверстие второй антиротационной стойки 29 и выходить из него.
Кроме того, соединения между элементами, раскрытые в вариантах осуществления настоящего изобретения могут использовать, но, не ограничиваясь этим, подшипниковое соединение или резьбовое соединение в соответствии с фактическими потребностями приложения. Например, и соединение между стационарной тарелкой 11 автомата перекоса нижнего несущего винта и вращающейся тарелкой 24 автомата перекоса нижнего несущего винта и соединение между стационарной тарелкой 3 автомата перекоса верхнего несущего винта и вращающейся тарелкой 4 автомата перекоса верхнего несущего винта могут использовать подшипниковое соединение; блок управления нижним несущим винтом может быть соединен с опорой 12 подшипника наконечника L-образной штанги, который соединен с вращающейся тарелкой 24 автомата перекоса нижнего несущего винта, обеспечивая, таким образом, соединение с вращающейся тарелкой 24 автомата перекоса нижнего несущего винта; нижняя рулевая штанга 45 может быть соединена с нижней тяговой втулкой 64 через подшипник 32 скольжения нижней тяговой штанги; верхняя тяговая штанга 41 наклонного плеча может быть подсоединена к опоре 36 подшипника наконечника верхней опоры наклонного плеча, которая соединен с наклонным плечом 42 зажима лопасти верхнего несущего винта, обеспечивая, таким образом, соединение с наклонным плечом 42 зажима лопасти верхнего несущего винта; верхняя тяговая втулка 39 может быть подсоединена к опоре 38 подшипника верхнего стыка тяговой штанги, которая соединена с верхней рулевой штангой 40 верхнего несущего винта, обеспечивая, таким образом, соединение с верхней рулевой штангой 40 верхнего несущего винта; первая резьбовая штанга 65 наружной муфты может быть соединена со стационарной тарелкой 11 автомата перекоса нижнего несущего винта через опору 33 подшипника наконечника штанги; нижняя тяговая штанга 35 наклонного плеча может быть соединена с вращающейся тарелкой 24 автомата перекоса нижнего несущего винта через опору 34 подшипника нижнего наконечника штанги наклонного плеча; аналогичным образом, нижний подшипник 48 скольжения, подшипник 57 скольжения нижнего несущего винта, подшипник 59 скольжения верхнего несущего винта и подшипник 51 также могут служить в качестве соединительных элементов между соответствующими элементами.
Следует отметить, что система приведения во вращение несущего винта, предоставляемая вариантами осуществления настоящего изобретения может быть подсоединена к раме двухвинтового соосного автономного вертолета через первую точку 60 соединения, вторую точку 61 соединения, третью точку 62 соединения, и четвертую точку 63 соединения.
Кроме того, для получения стабильной конструкции, система приведения во вращение верхнего несущего винта может содержать:
верхнюю раму 37 головки внутреннего вала, которая соединена с каждой из верхних рулевых штанг 40 верхнего несущего винта для поддержки каждой из верхних рулевых штанг 40 верхнего несущего винта, не влияя на его вращение, один конец верхней рамы 37 головки внутреннего вала прикреплен к концу внутреннего вала 15, на котором установлена втулка 16 верхнего несущего винта;
нижнюю раму 31 головки внутреннего вала, которая соединена с каждой из нижних рулевых штанг 45 верхнего несущего винта для поддержки каждой из нижних рулевых штанг 45 верхнего несущего винта, не влияя на его вращение, один конец нижней рамы 31 головки внутреннего вала закреплен на внутреннем валу 15, при этом другой конец соединен с концом подвижной штанги 46 наклонной тарелки нижнего несущего винта, на котором установлена вращающаяся тарелка 4 автомата перекоса верхнего несущего винта.
Можно увидеть, что добавлением верхней рамы 37 головки внутреннего вала можно избежать вибрации, возникающей при вращении верхних рулевых штанг 40 верхнего несущего винта и верхних тяговых штанг 41 наклонного плеча вместе с внутренним валом 15, улучшая, таким образом, конструкционную стабильность; а добавлением нижней рамы 31 головки внутреннего вала можно избежать вибрации, возникающей при вращении нижних рулевых штанг 45 верхнего несущего винта вместе с внутренним валом 15, улучшая, таким образом, конструкционную стабильность.
Кроме того, система приведения во вращение нижнего несущего винта может дополнительно содержать:
по меньшей мере три первых комплекта 5 редукторов, каждое из которых соединено с соответствующим первым двигателем 9, причем выходная частота вращения соответствующего первого двигателя 9 регулируется каждым из первых комплектов 5 редукторов.
Соответственно, система приведения во вращение верхнего несущего винта может дополнительно содержать:
по меньшей мере три вторых комплекта 43 редукторов, каждое из которых соединено с соответствующим вторым двигателем 49, причем выходная частота вращения соответствующего второго двигателя 49 регулируется каждым из вторых комплектов 43 редукторов.
Специалистам в данной области понятно, что первый комплект 5 редукторов и второй комплект 43 редукторов могут быть, но, не ограничиваясь этим, комплектом редукторов шестеренчатого типа или комплектом редукторов цепного типа.
Можно увидеть, что регулируемость первого двигателя 9 повышается за счет добавления первого комплекта 5 редукторов для первого двигателя 9; а регулируемость второго двигателя 49 повышается за счет добавления второго комплекта 43 редукторов для второго двигателя 49.
Кроме того, ширина одного конца наклонного плеча 13 зажима лопасти нижнего несущего винта, который закреплен на зажимном элементе первой лопасти, может быть больше ширины другого конца наклонного плеча 13 зажима лопасти нижнего несущего винта; ширина одного конца наклонного плеча 42 зажима лопасти верхнего несущего винта, который закреплен на зажимном элементе второй лопасти, может быть больше ширины другого конца наклонного плеча 42 зажима лопасти верхнего несущего винта; причем разница в ширине концов предназначена для обеспечения одинаковой прочности наклонных плеч 13 зажима лопасти нижнего несущего винта и наклонных плеч 42 зажима лопасти верхнего несущего винта для того, чтобы уменьшить массу наклонных плеч 13 зажима лопасти нижнего несущего винта и наклонных плеч 42 зажима лопасти верхнего несущего винта.
На основе описанного выше двухвинтового соосного автономного вертолета, как показано на фиг. 8, способ приведения во вращение несущего винта, предоставляемый вариантами осуществления настоящего изобретения, может содержать следующие шаги:
S101: прием команды на управление полетом,
причем команда на управление полетом может быть отправлена оператором через операционный интерфейс, когда он необходим для управления системой несущих винтов, устройство управления полетом на раме соосного автономного вертолета примет команду на управление полетом и исполнит последующие процессы в соответствии с принятой командой на управление полетом.
Специалистам в данной области понятно, что командами на управление полетом могут быть команда на отрыв, команда на зависание, команда «Вперед», команда на реверс, команда «Лево руля» или команда «Право руля». Команда на управление полетом может быть отправлена с помощью устройства дистанционного управления; в качестве альтернативы, команда на управление полетом может быть отправлена через наземную станцию управления.
S102: получение текущих вращательных состояний первых двигателей 9, соответствующих, по меньшей мере трем первым исполнительным механизмам 8 в системе приведения во вращение нижнего несущего винта;
S103: получение текущих вращательных состояний вторых двигателей 49, соответствующих по меньшей мере трем вторым исполнительным механизмам 58 в системе приведения во вращение верхнего несущего винта;
После приема команды на управление полетом, устройство управления полетом может получать текущие вращательные состояния первых двигателей 9, соответствующих по меньшей мере трем первым исполнительным механизмам 8 в системе приведения во вращение нижнего несущего винта, и текущие вращательные состояния вторых двигателей 49, соответствующих по меньшей мере трем вторым исполнительным механизмам 58 в системе приведения во вращение верхнего несущего винта, и, таким образом, выполнять последующие процессы. Кроме того, каждый из первых исполнительных механизмов 8 однозначно соответствует одному первому двигателю 9, каждый из вторых исполнительных механизмов 58 однозначно соответствует одному второму двигателю 59, при этом каждый из первых двигателей 9 однозначно соответствует одному текущему вращательному состоянию, каждый из вторых двигателей 49 однозначно соответствует одному текущему вращательному состоянию. Текущие вращательные состояния различных первых двигателей 9 могут быть одинаковыми или разными, и текущие вращательные состояния различных вторых двигателей 49 могут быть одинаковыми или разными.
Специалистам в данной области понятно, что вращательное состояние двигателя это угол, на который поворачивается двигатель.
S104: определение требуемых первых вращательных состояний первых двигателей 9 в соответствии с командой на управление полетом и текущими вращательными состояниями первых двигателей 9;
причем требуемые первые вращательные состояния первых двигателей 9 могут быть определены после получения команды на управление полетом и текущих вращательных состояний первых двигателей 9, и первые двигатели 9 затем управляются в соответствии с первыми вращательными состояниями. Причем каждый из первых двигателей 9 однозначно соответствует одному первому вращательному состоянию. Требуемые первые вращательные состояния различных первых двигателей 9 могут быть одинаковыми или разными.
S105: определение требуемых вторых вращательных состояний вторых двигателей 49 в соответствии с командой на управление полетом и текущими вращательными состояниями вторых двигателей 49;
причем требуемые вторые вращательные состояния вторых двигателей 49 могут быть определены после получения команды на управление полетом и текущих вращательных состояний вторых двигателей 49, и вторые двигатели 49 затем управляются в соответствии с вторыми вращательными состояниями. Причем каждый из вторых двигателей 49 однозначно соответствует одному второму вращательному состоянию. Требуемые вторые вращательные состояния различных вторых двигателей 49 могут быть одинаковыми или разными.
S106: первый двигатель 9 регулируется для вращения в соответствующем первом вращательном состоянии так, чтобы первая резьбовая штанга 65 наружной муфты каждого из первых исполнительных механизмов 8 удлинялась, укорачивалась или оставалась неизменной при вращении соответствующего первого двигателя 9;
причем первая резьбовая штанга 65 наружной муфты каждого из первых исполнительных механизмов 8 удлиняется, укорачивается или остается неизменной при вращении соответствующего первого двигателя 9 так, чтобы приводить стационарную тарелку 11 автомата перекоса нижнего несущего винта в системе приведения во вращение нижнего несущего винта к наклону в определенном направлении и, таким образом, приводить в движение вращающуюся тарелку 24 автомата перекоса нижнего несущего винта по меньшей мере две нижних тяговых штанги 35 наклонного плеча и по меньшей мере два наклонных плеча 13 зажима лопасти нижнего несущего винта, обеспечивая возможность закручивания зажимных элементов первой лопасти относительно втулки 14 нижнего несущего винта.
Следует отметить, что первая резьбовая штанга 65 наружной муфты первого двигателя 8 останется неизменной (т.е., не удлинится и не укоротится) при вращении соответствующего первого двигателя 9, когда первое вращательное состояние первого двигателя 9 и его текущее вращательное состояние одинаковы, при этом первая резьбовая штанга 65 наружной муфты первого двигателя 8 удлинится или укоротится при вращении соответствующего первого двигателя 9, когда первое вращательное состояние первого двигателя 9 и его текущее вращательное состояние различны;
S107: второй двигатель 49 регулируется для вращения в соответствующем втором вращательном состоянии так, чтобы вторая резьбовая штанга 28 наружной муфты каждого из вторых исполнительных механизмов 58 удлинялась, укорачивалась или оставалась неизменной при вращении соответствующего второго двигателя 49.
Причем вторая резьбовая штанга 28 наружной муфты каждого из вторых исполнительных механизмов 58 удлиняется, укорачивается или остается неизменной при вращении соответствующего второго двигателя 49 так, чтобы приводить стационарную тарелку 3 автомата перекоса верхнего несущего винта в системе приведения во вращение верхнего несущего винта к наклону в определенном направлении и, таким образом, приводить в движение вращающуюся тарелку 4 автомата перекоса верхнего несущего винта, по меньшей мере две L-образные рулевые штанги 47 верхнего несущего винта, по меньшей мере две нижние рулевые штанги 45 верхнего несущего винта, по меньшей мере две тяговых штанги 56 внутри внутреннего вала 15, по меньшей мере две верхние рулевые штанги 40 верхнего несущего винта, по меньшей мере две верхние тяговые штанги 41 наклонного плеча и по меньшей мере два наклонных плеча 42 зажима лопасти верхнего несущего винта, обеспечивая возможность закручивания зажимных элементов второй лопасти относительно втулки 16 верхнего несущего винта.
Следует отметить, что вторая резьбовая штанга 28 наружной муфты второго двигателя 58 останется неизменной (т.е., не удлинится и не укоротится) при вращении соответствующего второго исполнительного механизма 58, когда второе вращательное состояние второго двигателя 58 и его текущее вращательное состояние одинаковы, при этом вторая резьбовая штанга 28 наружной муфты второго двигателя 58 удлинится или укоротится при вращении соответствующего второго исполнительного механизма 58, когда второе вращательное состояние второго двигателя 58 и его текущее вращательное состояние различны.
Причем вращение втулки 14 нижнего несущего винта вместе с наружным валом 19 приводит во вращение вращающуюся тарелку 24 автомата перекоса нижнего несущего винта под действием по меньшей мере двух блоков управления нижним несущим винтом в системе приведения во вращение нижнего несущего винта; вращение втулки 16 верхнего несущего винта вместе с внутренним валом 15 приводит во вращение вращающуюся тарелку 4 автомата перекоса верхнего несущего винта под действием L-образных рулевых штанг 47 верхнего несущего винта и нижних рулевых штанг 45 верхнего несущего винта.
Стационарная тарелка 11 автомата перекоса нижнего несущего винта не может поворачиваться вместе с вращающейся тарелкой 24 автомата перекоса нижнего несущего винта из-за действия первой антиротационной стойки 25 и первого ползуна 44 в системе приведения во вращение нижнего несущего винта; стационарная тарелка 3 автомата перекоса верхнего несущего винта не может поворачиваться вместе с вращающейся тарелкой 4 автомата перекоса верхнего несущего винта из-за действия второй антиротационной стойки 29 и второго ползуна 30 в системе приведения во вращение верхнего несущего винта.
В варианте осуществления настоящего изобретения, способ приведения во вращение несущего винта может содержать: прием команды на управление полетом; получение текущих вращательных состояний первых двигателей 9, соответствующих по меньшей мере трем первым исполнительным механизмам 8 и текущих вращательных состояний вторых двигателей 49, соответствующих по меньшей мере трем вторым исполнительным механизмам 58; определение требуемых первых вращательных состояний первых двигателей 9 в соответствии с командой на управление полетом и текущими вращательными состояниями первых двигателей 9; определение требуемых вторых вращательных состояний вторых двигателей 49 в соответствии с командой на управление полетом и текущими вращательными состояниями вторых двигателей 49; управление первым двигателем 9, чтобы вращать его в соответствующем первом вращательном состоянии так, что первая резьбовая штанга 65 наружной муфты каждого из первых исполнительных механизмов 8 удлиняется, укорачивается или остается неизменной при вращении соответствующего первого двигателя 9 так, чтобы приводить стационарную тарелку 11 автомата перекоса нижнего несущего винта в системе приведения во вращение нижнего несущего винта к наклону в определенном направлении и, таким образом, приводить в движение вращающуюся тарелку 24 автомата перекоса нижнего несущего винта, по меньшей мере две нижних тяговых штанги 35 наклонного плеча и по меньшей мере два наклонных плеча 13 зажима лопасти нижнего несущего винта, обеспечивая возможность закручивания зажимных элементов первой лопасти относительно втулки 14 нижнего несущего винта; управление вторым двигателем 49, чтобы вращать его в соответствующем втором вращательном состоянии так, что вторая резьбовая штанга 28 наружной муфты каждого из вторых исполнительных механизмов 58 удлиняется, укорачивается или остается неизменной при вращении соответствующего второго двигателя 49 так, чтобы приводить стационарную тарелку 3 автомата перекоса верхнего несущего винта в системе приведения во вращение верхнего несущего винта к наклону в определенном направлении и, таким образом, приводить в движение вращающуюся тарелку 4 автомата перекоса верхнего несущего винта, по меньшей мере две L-образные рулевые штанги 47 верхнего несущего винта, по меньшей мере две нижние рулевые штанги 45 верхнего несущего винта, по меньшей мере две тяговых штанги 56 внутри внутреннего вала 15, по меньшей мере две верхние рулевые штанги 40 верхнего несущего винта, по меньшей мере две верхние тяговые штанги 41 наклонного плеча и по меньшей мере два наклонных плеча 42 зажима лопасти верхнего несущего винта, обеспечивая возможность закручивания зажимных элементов второй лопасти относительно втулки 16 верхнего несущего винта. Таким образом, с помощью способа приведения во вращение несущего винта, предоставляемого вариантами осуществления настоящего изобретения, различные компоненты, расположенные между резьбовой штангой наружной муфты и зажимным элементом лопасти, могут работать совместно за счет управления поворотным углом несущих винтов, чтобы контролировать удлинение и укорочение резьбовой штанги наружной муфты в исполнительном механизме, с которым соединен несущий винт так, чтобы скомпоновать различные элементы, расположенные между резьбовой штангой наружной муфты и зажимным элементом лопасти, для придания закручивания зажимному элементу лопасти относительно втулки, позволяя тем самым уменьшить сложность процесса приведения во вращение несущего винта и преодолеть недостатки сложного процесса приведения во вращение существующих способов, применяемых в системах приведения во вращение несущего винта.
В частности, как показано на фиг. 9, шаг определения требуемых первых вращательных состояний первых двигателей 9 в соответствии с командой на управление полетом и текущими вращательными состояниями первых двигателей 9 может содержать:
S201: текущий угол закручивания, на который повернут каждый из зажимных элементов первой лопасти относительно втулки 14 нижнего несущего винта, определяется в соответствии с текущими вращательными состояниями первых двигателей 9;
причем каждый из зажимных элементов первой лопасти однозначно соответствует одному текущему углу закручивания.
Специалистам в данной области понятно, что текущий угол закручивания, на который повернут каждый из зажимных элементов первой лопасти относительно втулки 14 нижнего несущего винта можно определить в соответствии с заранее заданным соотношением между углом закручивания, на который повернут каждый из зажимных элементов первой лопасти относительно втулки 14 нижнего несущего винта и вращательными состояниями первых двигателей 9 после определения текущих вращательных состояний первых двигателей 9. Причем соответствующее соотношение между углом закручивания, на который повернут каждый из зажимных элементов первой лопасти относительно втулки 14 нижнего несущего винта и вращательными состояниями первых двигателей 9, может быть получено расчетным путем.
Причем текущие углы закручивания, на которые повернуты различные зажимные элементы первой лопасти относительно втулки 14 нижнего несущего винта, могут быть одинаковыми или разными.
S202: требуемый первый угол закручивания, на который повернут каждый из зажимных элементов первой лопасти относительно втулки 14 нижнего несущего винта, определяется в соответствии с командой на управление полетом и текущим углом закручивания, на который повернут каждый из зажимных элементов первой лопасти относительно втулки 14 нижнего несущего винта;
причем каждый из зажимных элементов первой лопасти однозначно соответствует первому текущему углу закручивания. Требуемый первый угол закручивания, на который повернут каждый из зажимных элементов первой лопасти относительно втулки 14 нижнего несущего винта, может быть получен на основе комбинации полученной команды на управление полетом и полученного текущего угла закручивания, на который повернут каждый из зажимных элементов первой лопасти относительно втулки 14 нижнего несущего винта; затем выполняются последующие процессы.
Причем первые углы закручивания, на которые повернуты различные зажимные элементы первой лопасти относительно втулки 14 нижнего несущего винта, могут быть одинаковыми или разными.
S203: требуемое первое вращательное состояние каждого из первых двигателей 9 определяется в соответствии с требуемым первым углом закручивания, на который повернут каждый из зажимных элементов первой лопасти относительно втулки 14 нижнего несущего винта.
Требуемое первое вращательное состояние каждого из первых двигателей 9 можно определить в соответствии с заранее заданным соотношением между углом закручивания, на который повернут каждый из зажимных элементов первой лопасти относительно втулки 14 нижнего несущего винта и вращательными состояниями первых двигателей 9 после определения требуемого первого угла закручивания, на который повернут каждый из зажимных элементов первой лопасти относительно втулки 14 нижнего несущего винта. Причем требуемые первые вращательные состояния различных первых двигателей 9 могут быть одинаковыми или разными.
Соответственно, как показано на фиг. 10, шаг определения требуемых вторых вращательных состояний вторых двигателей 49 в соответствии с командой на управление полетом и текущими вращательными состояниями вторых двигателей 10 может содержать:
S301: текущий угол закручивания, на который повернут каждый из зажимных элементов второй лопасти относительно втулки 16 верхнего несущего винта, определяется в соответствии с текущими вращательными состояниями вторых двигателей 49;
причем каждый из зажимных элементов второй лопасти однозначно соответствует одному текущему углу закручивания.
Специалистам в данной области понятно, что текущий угол закручивания, на который повернут каждый из зажимных элементов второй лопасти относительно втулки 16 верхнего несущего винта можно определить в соответствии с заранее заданным соотношением между углом закручивания, на который повернут каждый из зажимных элементов второй лопасти относительно втулки 16 верхнего несущего винта и вращательными состояниями вторых двигателей 49 после определения текущих вращательных состояний вторых двигателей 49. Причем соответствующее соотношение между углом закручивания, на который повернут каждый из зажимных элементов второй лопасти относительно втулки 16 верхнего несущего винта и вращательными состояниями вторых двигателей 49, может быть получено расчетным путем.
Причем текущие углы закручивания, на которые повернуты различные зажимные элементы второй лопасти относительно втулки 16 верхнего несущего винта, могут быть одинаковыми или разными.
S302: требуемый второй угол закручивания, на который повернут каждый из зажимных элементов второй лопасти относительно втулки 16 верхнего несущего винта, определяется в соответствии с командой на управление полетом и требуемым текущим углом закручивания, на который повернут каждый из зажимных элементов второй лопасти относительно втулки 16 верхнего несущего винта;
Причем каждый из зажимных элементов второй лопасти однозначно соответствует второму углу закручивания.
Требуемый второй угол закручивания, на который повернут каждый из зажимных элементов второй лопасти относительно втулки 16 верхнего несущего винта, может быть получен на основе комбинации полученной команды на управление полетом и полученного текущего угла закручивания, на который повернут каждый из зажимных элементов второй лопасти относительно втулки 16 верхнего несущего винта; затем выполняются последующие процессы.
Причем вторые углы закручивания, на которые повернуты различные зажимные элементы второй лопасти относительно втулки 16 верхнего несущего винта, могут быть одинаковыми или разными.
S303: требуемое второе вращательное состояние каждого из вторых двигателей 49 определяется в соответствии с требуемым вторым углом закручивания, на который повернут каждый из зажимных элементов второй лопасти относительно втулки 16 верхнего несущего винта.
Требуемое второе вращательное состояние каждого из вторых двигателей 49 можно определить в соответствии с заранее заданным соотношением между углом закручивания, на который повернут каждый из зажимных элементов второй лопасти относительно втулки 16 верхнего несущего винта и вращательными состояниями вторых двигателей 49 после определения требуемого второго угла закручивания, на который повернут каждый из зажимных элементов второй лопасти относительно втулки 16 верхнего несущего винта. Причем вторые вращательные состояния различных вторых двигателей 49 могут быть одинаковыми или разными.
Следует заметить, что раскрытый выше способ определения требуемых первых вращательных состояний первых двигателей 9 в соответствии с командой на управление полетом и текущими вращательными состояниями первых двигателей 9 приведен только для иллюстрации, и не должен быть истолкован как ограничивающий варианты осуществления настоящего изобретения; аналогичным образом, раскрытый выше способ определения требуемых вторых вращательных состояний вторых двигателей 49 в соответствии с командой на управление полетом и текущими вращательными состояниями вторых двигателей 49 приведен только для иллюстрации, и не должен быть истолкован как ограничивающий варианты осуществления настоящего изобретения.
В соответствии с вариантами осуществления способа, вариант осуществления настоящего изобретения также предоставляет устройство для приведения во вращение несущих винтов, которое применимо в двухвинтовом соосном автономном вертолете, который может содержать:
наружный вал 19;
втулку 14 нижнего несущего винта, закрепленную на внешней стороне одного из концов наружного вала 19;
по меньшей мере два зажимных элемента первой лопасти, соединенных с втулкой 14 нижнего несущего винта, причем каждый из зажимных элементов первой лопасти может быть закручен относительно втулки 14 нижнего несущего винта и содержит первый зажим 20 лопасти и второй зажим 22 лопасти, причем первый зажим 20 лопасти и второй зажим 22 лопасти совместно зажимают лопасть нижнего несущего винта;
внутренний вал 15;
втулку 16 верхнего несущего винта, закрепленную на внешней стороне одного из концов внутреннего вала 15;
по меньшей мере два зажимных элемента второй лопасти, соединенных с втулкой 16 верхнего несущего винта, причем каждый из зажимных элементов второй лопасти может быть закручен относительно втулки 16 верхнего несущего винта и содержит третий зажим 17 лопасти и четвертый зажим 18 лопасти, причем третий зажим 17 лопасти и четвертый зажим 18 лопасти совместно зажимают лопасть верхнего несущего винта;
коробку, вмещающую зубчатую передачу и содержащую верхнюю крышку 26, корпус 27 коробки и нижнюю крышку 1, причем зубчатая передача соединена с наружным валом 19 и внутренним валом 15;
синхронный шкив 7, соединенный с зубчатой передачей, причем вращение синхронного шкива приводит в движение зубчатую передачу таким образом, чтобы привести во вращение наружный вал 19 и внутренний вал 15, и причем наружный вал 19 вращается в противоположном направлении по отношению к внутреннему валу 15, втулка 14 нижнего несущего винта неподвижна относительно наружного вала 19, а втулка 16 верхнего несущего винта неподвижна относительно внутреннего вала 15;
систему приведения во вращение несущих винтов, содержащую систему приведения во вращение верхнего несущего винта и систему приведения во вращение нижнего несущего винта.
Как показано на фиг. 11, устройство для приведения во вращение несущих винтов может содержать:
модуль 310 приема команд для приема команды на управление полетом;
модуль 320 получения текущих состояний для получения текущих вращательных состояний первых двигателей 9, соответствующих по меньшей мере трем первым исполнительным механизмам 8 в системе приведения во вращение нижнего несущего винта и текущих вращательных состояний вторых двигателей 49, соответствующих по меньшей мере трем вторым исполнительным механизмам 58 в системе приведения во вращение верхнего несущего винта; при этом каждый из первых исполнительных механизмов 8 однозначно соответствует одному первому двигателю 9, каждый из вторых исполнительных механизмов 58 однозначно соответствует одному второму двигателю 59, при этом каждый из первых двигателей 9 однозначно соответствует одному текущему вращательному состоянию, каждый из вторых двигателей 49 однозначно соответствует одному текущему вращательному состоянию;
модуль 330 определения первых вращательных состояний для определения требуемых первых вращательных состояний первых двигателей 9 в соответствии с командой на управление полетом и текущими вращательными состояниями первых двигателей 9; причем каждый из первых двигателей 9 однозначно соответствует одному первому вращательному состоянию;
модуль 340 определения вторых вращательных состояний для определения требуемых вторых вращательных состояний вторых двигателей 49 в соответствии с командой на управление полетом и текущими вращательными состояниями вторых двигателей 49; причем каждый из вторых двигателей 49 однозначно соответствует одному второму вращательному состоянию;
первый модуль 350 управления для управления первым двигателем 9, чтобы вращать его в соответствующем первом вращательном состоянии так, что первая резьбовая штанга 65 наружной муфты каждого из первых исполнительных механизмов 8 удлиняется, укорачивается или остается неизменной при вращении соответствующего первого двигателя 9 так, чтобы приводить стационарную тарелку 11 автомата перекоса нижнего несущего винта в системе приведения во вращение нижнего несущего винта к наклону в определенном направлении и, таким образом, приводить в движение вращающуюся тарелку 24 автомата перекоса нижнего несущего винта, по меньшей мере две нижних тяговых штанги 35 наклонного плеча и по меньшей мере два наклонных плеча 13 зажима лопасти нижнего несущего винта, обеспечивая возможность закручивания зажимных элементов первой лопасти относительно втулки 14 нижнего несущего винта; причем, каждый из первых исполнительных механизмов 8 содержит корпус; при этом первая резьбовая штанга 65 наружной муфты может телескопически выдвигаться и задвигаться, при этом один ее конец находится в корпусе, а конец каждой из первых резьбовых штанг 65 наружной муфты, который выступает из корпуса, соединен со стационарной тарелкой 11 автомата перекоса нижнего несущего винта; вращающаяся тарелка 24 автомата перекоса нижнего несущего винта посажена на стационарную тарелку 11 автомата перекоса нижнего несущего винта, при этом стационарная тарелка 11 автомата перекоса нижнего несущего винта соединена с вращающейся тарелкой 24 автомата перекоса нижнего несущего винта через подшипник 57 скольжения нижнего несущего винта, при этом вращающаяся тарелка 24 автомата перекоса нижнего несущего винта и вращающаяся тарелка 11 автомата перекоса нижнего несущего винта могут вращаться независимо друг от друга; один конец каждого из наклонных плеч 13 зажима лопасти нижнего несущего винта закреплен на заданной монтажной поверхности соответствующего зажимного элемента первой лопасти; один конец каждой из тяговых штанг 35 наклонного плеча соединен с другим концом соответствующего наклонного плеча 13 зажима лопасти нижнего несущего винта; вращающаяся тарелка 24 автомата перекоса нижнего несущего винта соединена с другим концом каждой из тяговых штанг 35 наклонного плеча;
второй модуль 360 управления для управления вторым двигателем 49, чтобы вращать его в соответствующем втором вращательном состоянии так, что вторая резьбовая штанга 28 наружной муфты каждого из вторых исполнительных механизмов 58 удлиняется, укорачивается или остается неизменной при вращении соответствующего второго двигателя 49 так, чтобы приводить стационарную тарелку 3 автомата перекоса верхнего несущего винта в системе приведения во вращение верхнего несущего винта к наклону в определенном направлении и, таким образом, приводить в движение вращающуюся тарелку 4 автомата перекоса верхнего несущего винта, по меньшей мере две L-образные рулевые штанги 47 верхнего несущего винта, по меньшей мере две нижние рулевые штанги 45 верхнего несущего винта, по меньшей мере две тяговых штанги 56 внутри внутреннего вала 15, по меньшей мере две верхние рулевые штанги 40 верхнего несущего винта, по меньшей мере две верхние тяговые штанги 41 наклонного плеча и по меньшей мере два наклонных плеча 42 зажима лопасти верхнего несущего винта, обеспечивая возможность закручивания зажимных элементов второй лопасти относительно втулки 16 верхнего несущего винта; причем, каждый из вторых исполнительных механизмов 58 содержит корпус; при этом вторая резьбовая штанга 28 наружной муфты может телескопически выдвигаться и задвигаться, при этом один ее конец находится в корпусе, а конец каждой из вторых резьбовых штанг 28 наружной муфты, который выступает из корпуса, соединен со стационарной тарелкой 3 автомата перекоса верхнего несущего винта; стационарная тарелка 3 автомата перекоса верхнего несущего винта соединена с вращающейся тарелкой 4 автомата перекоса верхнего несущего винта, при этом вращающаяся тарелка 4 автомата перекоса верхнего несущего винта и стационарная тарелка 3 автомата перекоса верхнего несущего винта могут вращаться независимо друг от друга; один конец каждого из наклонных плеч 42 зажима лопасти верхнего несущего винта закреплен на заданной монтажной поверхности соответствующего зажимного элемента второй лопасти; при этом один конец каждой из тяговых штанг 41 наклонного плеча соединен с другим концом соответствующего наклонного плеча 42 зажима лопасти верхнего несущего винта; один конец каждой из верхних рулевых штанг 40 верхнего несущего винта соединен с другим концом соответствующей верхней тяговой штанги 41 наклонного плеча; верхняя тяговая втулка 39, соединенная с другим концом каждой из верхних рулевых штанг 40 верхнего несущего винта; один конец каждой из тяговых штанг 56 соединен с соответствующей верхней рулевой штангой 40 верхнего несущего винта через верхнюю тяговую втулку 39; один конец нижней тяговой втулки 64 соединен с другим концом тяговой штанги 56; один конец каждой из нижних рулевых штанг 45 верхнего несущего винта соединен с нижней тяговой втулкой 64 и также соединен с другим концом соответствующей тяговой штанги 56 через нижнюю тяговую втулку 64; один конец каждой из L-образных рулевых штанг 47 верхнего несущего винта соединен с другим концом соответствующей нижней рулевой штанги 45 верхнего несущего винта; вращающаяся тарелка 4 автомата перекоса верхнего несущего винта соединена с другим концом L-образной рулевой штанги 47 верхнего несущего винта;
причем из-за действия по меньшей мере двух блоков управления нижним несущим винтом в системе приведения во вращение нижнего несущего винта, вращение втулки 14 нижнего несущего винта вместе с наружным валом 19 приводит во вращение вращающуюся тарелку 24 автомата перекоса нижнего несущего винта; из-за действия L-образных рулевых штанг 47 верхнего несущего винта и нижних рулевых штанг 45 верхнего несущего винта, вращение втулки 16 верхнего несущего винта вместе с внутренним валом 15 приводит во вращение вращающуюся тарелку 4 автомата перекоса верхнего несущего винта; при этом один конец каждого из блоков управления нижним несущим винтом закреплен на втулке 14 нижнего несущего винта, а другой конец закреплен на вращающейся тарелке 24 автомата перекоса нижнего несущего винта;
стационарная тарелка 11 автомата перекоса нижнего несущего винта не может поворачиваться вместе с вращающейся тарелкой 24 автомата перекоса нижнего несущего винта из-за действия первой антиротационной стойки 25 и первого ползуна 44 в системе приведения во вращение нижнего несущего винта; стационарная тарелка 3 автомата перекоса верхнего несущего винта не может поворачиваться вместе с вращающейся тарелкой 4 автомата перекоса верхнего несущего винта из-за действия второй антиротационной стойки 29 и второго ползуна 30 в системе приведения во вращение верхнего несущего винта; при этом один конец первой антиротационной стойки 25 закреплен на верхней крышке 26, а другой конец снабжен сквозным отверстием, при этом первый ползун 44 расположен на стационарной тарелке 11 автомата перекоса нижнего несущего винта и проникает в сквозное отверстие первой антиротационной стойки 25; один конец второй антиротационной стойки 29 закреплен на монтажной плите 2 исполнительных механизмов, а другой конец снабжен сквозным отверстием, при этом, второй ползун 30 расположен на стационарной тарелке 3 автомата перекоса верхнего несущего винта и проникает в сквозное отверстие второй антиротационной стойки 29.
В варианте осуществления настоящего изобретения, способ приведения во вращение несущего винта может содержать: прием команды на управление полетом; получение текущих вращательных состояний первых двигателей 9, соответствующих по меньшей мере трем первым исполнительным механизмам 8 и текущих вращательных состояний вторых двигателей 49, соответствующих по меньшей мере трем вторым исполнительным механизмам 58; определение требуемых первых вращательных состояний первых двигателей 9 в соответствии с командой на управление полетом и текущими вращательными состояниями первых двигателей 9; определение требуемых вторых вращательных состояний вторых двигателей 49 в соответствии с командой на управление полетом и текущими вращательными состояниями вторых двигателей 49; управление первым двигателем 9, чтобы вращать его в соответствующем первом вращательном состоянии так, что первая резьбовая штанга 65 наружной муфты каждого из первых исполнительных механизмов 8 удлиняется, укорачивается или остается неизменной при вращении соответствующего первого двигателя 9 так, чтобы приводить стационарную тарелку 11 автомата перекоса нижнего несущего винта в системе приведения во вращение нижнего несущего винта к наклону в определенном направлении и, таким образом, приводить в движение вращающуюся тарелку 24 автомата перекоса нижнего несущего винта, по меньшей мере две нижних тяговых штанги 35 наклонного плеча и по меньшей мере два наклонных плеча 13 зажима лопасти нижнего несущего винта, обеспечивая возможность закручивания зажимных элементов первой лопасти относительно втулки 14 нижнего несущего винта; управление вторым двигателем 49, чтобы вращать его в соответствующем втором вращательном состоянии так, что вторая резьбовая штанга 28 наружной муфты каждого из вторых исполнительных механизмов 58 удлиняется, укорачивается или остается неизменной при вращении соответствующего второго двигателя 49 так, чтобы приводить стационарную тарелку 3 автомата перекоса верхнего несущего винта в системе приведения во вращение верхнего несущего винта к наклону в определенном направлении и, таким образом, приводить в движение вращающуюся тарелку 4 автомата перекоса верхнего несущего винта, по меньшей мере две L-образные рулевые штанги 47 верхнего несущего винта, по меньшей мере две нижние рулевые штанги 45 верхнего несущего винта, по меньшей мере две тяговых штанги 56 внутри внутреннего вала 15, по меньшей мере две верхние рулевые штанги 40 верхнего несущего винта, по меньшей мере две верхние тяговые штанги 41 наклонного плеча и по меньшей мере два наклонных плеча 42 зажима лопасти верхнего несущего винта, обеспечивая возможность закручивания зажимных элементов второй лопасти относительно втулки 16 верхнего несущего винта. Таким образом, с помощью способа приведения во вращение несущего винта, предоставляемого вариантами осуществления настоящего изобретения, различные компоненты, расположенные между резьбовой штангой наружной муфты и зажимным элементом лопасти, могут работать совместно за счет управления поворотным углом несущих винтов, чтобы контролировать удлинение и укорочение резьбовой штанги наружной муфты в исполнительном механизме, с которым соединен несущий винт так, чтобы скомпоновать различные элементы, расположенные между резьбовой штангой наружной муфты и зажимным элементом лопасти, для придания закручивания зажимному элементу лопасти относительно втулки, позволяя тем самым уменьшить сложность процесса приведения во вращение несущего винта и преодолеть недостатки сложного процесса приведения во вращение существующих способов, применяемых в системах приведения во вращение несущего винта.
Причем модуль 330 определения первых вращательных состояний может содержать:
блок определения текущих углов закручивания для определения текущего угла закручивания, на который повернут каждый из зажимных элементов первой лопасти относительно втулки 14 нижнего несущего винта, в соответствии с текущими вращательными состояниями первых двигателей 9; причем каждый из зажимных элементов первой лопасти однозначно соответствует одному текущему углу закручивания;
блок определения первых углов закручивания для определения требуемого первого угла закручивания, на который повернут каждый из зажимных элементов первой лопасти относительно втулки 14 нижнего несущего винта в соответствии с командой на управление полетом и текущим углом закручивания, на который повернут каждый из зажимных элементов первой лопасти относительно втулки 14 нижнего несущего винта; причем каждый из зажимных элементов первой лопасти однозначно соответствует первому текущему углу закручивания; и
блок определения первых вращательных состояний для определения требуемого первого вращательного состояния каждого из первых двигателей 9 в соответствии с требуемым первым углом закручивания, на который повернут каждый из зажимных элементов первой лопасти относительно втулки 14 нижнего несущего винта.
Соответственно, модуль 340 определения вторых вращательных состояний может содержать:
блок определения текущих углов закручивания для определения текущего угла закручивания, на который повернут каждый из зажимных элементов второй лопасти относительно втулки 16 верхнего несущего винта, в соответствии с текущими вращательными состояниями вторых двигателей 49; причем каждый из зажимных элементов второй лопасти однозначно соответствует одному текущему углу закручивания;
блок определения вторых углов закручивания для определения требуемого второго угла закручивания, на который повернут каждый из зажимных элементов второй лопасти относительно втулки 16 верхнего несущего винта в соответствии с командой на управление полетом и текущим углом закручивания, на который повернут каждый из зажимных элементов второй лопасти относительно втулки 16 верхнего несущего винта; причем каждый из зажимных элементов второй лопасти однозначно соответствует одному второму углу закручивания; и
блок определения вторых вращательных состояний для определения требуемого второго вращательного состояния каждого из вторых двигателей 49 в соответствии с требуемым вторым углом закручивания, на который повернут каждый из зажимных элементов второй лопасти относительно втулки 16 верхнего несущего винта.
Приведенное выше раскрытие относится только к предпочтительным вариантам осуществления настоящего изобретения, и любые модификации, эквивалентные замены и улучшения, и тому подобные изменения, сделанные в рамках сущности и принципов настоящего изобретения, попадают в объем правовой охраны настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОДНАЯ СИСТЕМА НЕСУЩИХ ВИНТОВ | 2013 |
|
RU2641396C2 |
| ТРАНСМИССИЯ ВЕРТОЛЕТА | 2014 |
|
RU2580344C2 |
| Вертолет с реактивным приводом несущего винта | 2018 |
|
RU2706746C1 |
| СООСНЫЙ ПОДУЗЕЛ ТРАНСМИССИЯ/ЦЕНТРАЛЬНАЯ ВТУЛКА УЗЛА НЕСУЩИХ ВИНТОВ БЕСПИЛОТНОГО ВОЗДУШНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2108269C1 |
| ОБЪЕДИНЕННЫЙ ОПОРНЫЙ ПОДУЗЕЛ УЗЛА НЕСУЩИХ ВИНТОВ БЕСПИЛОТНОГО ВОЗДУШНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2113378C1 |
| ТОРОИДАЛЬНЫЙ ФЮЗЕЛЯЖ БЕСПИЛОТНОГО ВОЗДУШНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2108267C1 |
| ПРИВОДНОЙ КИНЕМАТИЧЕСКИЙ УЗЕЛ БЕСПИЛОТНОГО ВОЗДУШНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2114766C1 |
| ЛОПАСТНОЙ ПОДУЗЕЛ НЕСУЩЕГО ВИНТА БЕСПИЛОТНОГО ВОЗДУШНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2125952C1 |
| ДЕМПФИРУЮЩИЙ УЗЕЛ НЕСУЩИХ ВИНТОВ БЕСПИЛОТНОГО ВОЗДУШНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2117604C1 |
| МЕХАНИЗМ ПАРИРОВАНИЯ КРУТЯЩЕГО МОМЕНТА ТАРЕЛКИ АВТОМАТА ПЕРЕКОСА | 2006 |
|
RU2397113C2 |






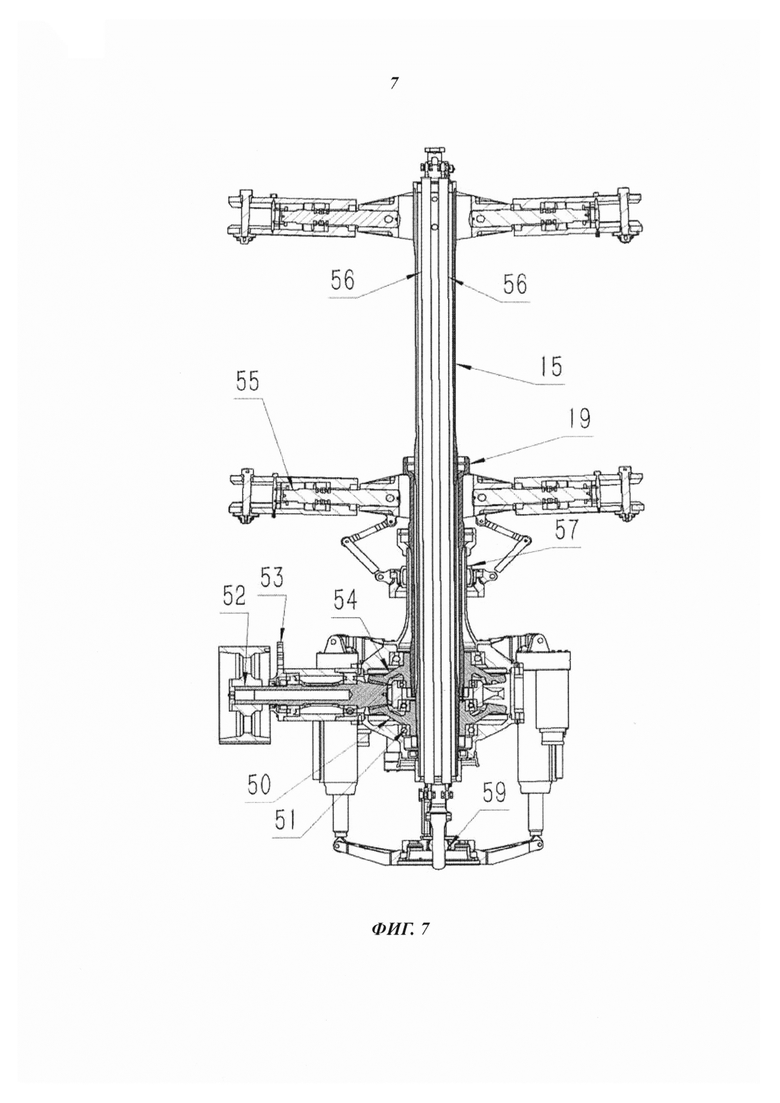



Изобретение относится к области авиации, в частности к конструкциям и способам управления двухвинтовыми несущими системами. Способ приведения во вращение несущего винта включает прием команды на управление полетом, получение текущих вращательных состояний первых двигателей, соответствующих первым исполнительным механизмам, и текущих вращательных состояний вторых двигателей, соответствующих вторым исполнительным механизмам. Далее определяют требуемые первые вращательные состояния первых двигателей в соответствии с командой на управление полетом и текущими вращательными состояниями первых двигателей. Определяют требуемые вторые вращательные состояния вторых двигателей в соответствии с командой на управление полетом и текущими вращательными состояниями вторых двигателей. Управляют первым двигателем с обеспечением его вращения в соответствующем первом вращательном состоянии так, чтобы закручивать зажимные элементы первой лопасти относительно втулки нижнего несущего винта. Осуществляют управление вторым двигателем с обеспечением его вращения в соответствующем втором вращательном состоянии так, чтобы закручивать зажимные элементы второй лопасти относительно втулки верхнего несущего винта. Обеспечивается управление по курсу соосного вертолета. 2 н. и 5 з.п. ф-лы, 11 ил.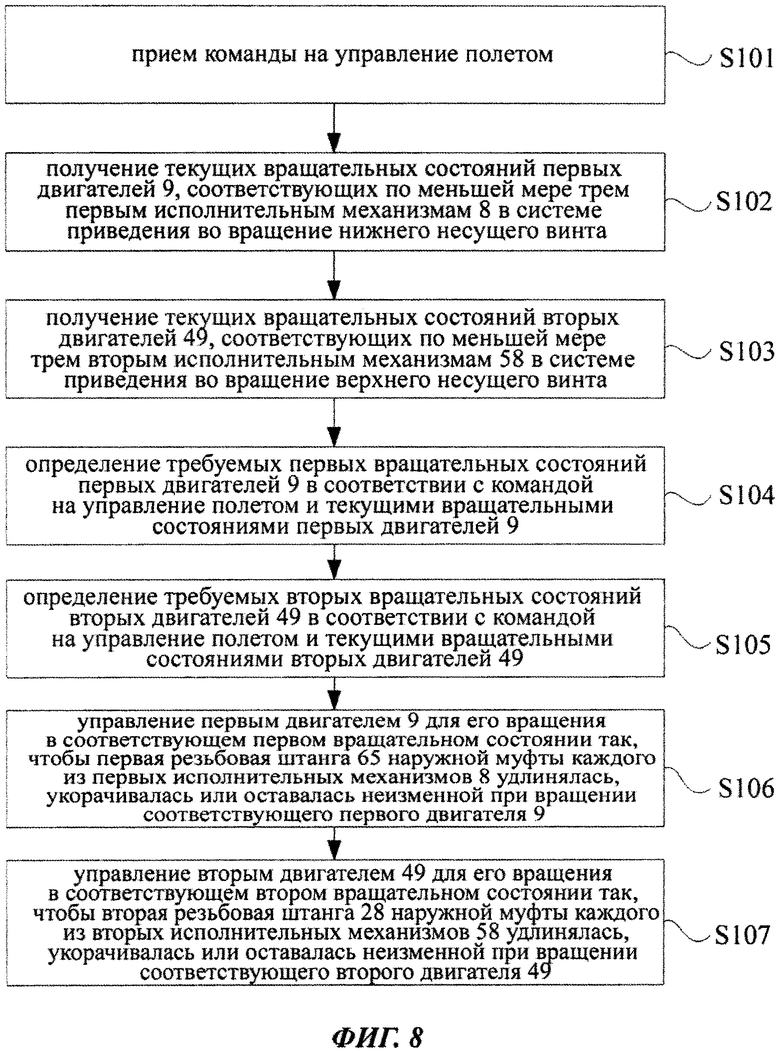
1. Способ приведения во вращение несущего винта, который применим к двухвинтовому соосному автономному вертолету, отличающийся тем, что этот двухвинтовой соосный автономный вертолет содержит:
наружный вал (19);
втулку (14) нижнего несущего винта, закрепленную на внешней стороне одного из концов наружного вала (19);
по меньшей мере два зажимных элемента первой лопасти, соединенных с втулкой (14) нижнего несущего винта, причем каждый из зажимных элементов первой лопасти выполнен с возможностью закручивания относительно втулки (14) нижнего несущего винта и содержит первый зажим (20) лопасти и второй зажим (22) лопасти, причем первый зажим (20) лопасти и второй зажим (22) лопасти совместно зажимают лопасть нижнего несущего винта;
внутренний вал (15);
втулку (16) верхнего несущего винта, закрепленную на внешней стороне одного из концов внутреннего вала (15);
по меньшей мере два зажимных элемента второй лопасти, соединенных с втулкой (16) верхнего несущего винта, причем каждый из зажимных элементов второй лопасти выполнен с возможностью закручивания относительно втулки (16) верхнего несущего винта и содержит третий зажим (17) лопасти и четвертый зажим (18) лопасти, причем третий зажим (17) лопасти и четвертый зажим (18) лопасти совместно зажимают лопасть верхнего несущего винта;
коробку, вмещающую зубчатую передачу и содержащую верхнюю крышку (26), корпус (27) коробки и нижнюю крышку (1), причем зубчатая передача соединена с наружным валом (19) и внутренним валом (15);
синхронный шкив (7), соединенный с зубчатой передачей, причем вращение синхронного шкива обеспечивает приведение во вращение зубчатой передачи таким образом, чтобы привести во вращение наружный вал (19) и внутренний вал (15), при этом вращение наружного вала (19) имеет противоположное направление по отношению к внутреннему валу (15), втулка (14) нижнего несущего винта неподвижна относительно наружного вала (19), а втулка (16) верхнего несущего винта неподвижна относительно внутреннего вала (15);
систему приведения во вращение несущих винтов, содержащую систему приведения во вращение верхнего несущего винта и систему приведения во вращение нижнего несущего винта;
причем способ приведения во вращение несущего винта содержит следующее:
принимают команды на управление полетом;
получают текущие вращательные состояния первых двигателей (9), соответствующих по меньшей мере трем первым исполнительным механизмам (8) в системе приведения во вращение нижнего несущего винта, и текущие вращательные состояния вторых двигателей (49), соответствующие по меньшей мере трем вторым исполнительным механизмам (58) в системе приведения во вращение верхнего несущего винта; причем каждый из первых исполнительных механизмов (8) однозначно соответствует одному первому двигателю (9), каждый из вторых исполнительных механизмов (58) однозначно соответствует одному второму двигателю (49), при этом каждый из первых двигателей (9) однозначно соответствует одному текущему вращательному состоянию, каждый из вторых двигателей (49) однозначно соответствует одному текущему вращательному состоянию;
определяют требуемые первые вращательные состояния первых двигателей (9) в соответствии с командой на управление полетом и текущими вращательными состояниями первых двигателей (9); причем каждый из первых двигателей (9) однозначно соответствует одному первому вращательному состоянию;
определяют требуемые вторые вращательные состояния вторых двигателей (49) в соответствии с командой на управление полетом и текущими вращательными состояниями вторых двигателей (49); причем каждый из вторых двигателей (49) однозначно соответствует одному второму вращательному состоянию;
управляют первым двигателем (9) с обеспечением его вращения в соответствующем первом вращательном состоянии так, чтобы удлинять, укорачивать или оставлять неизменной первую резьбовую штангу (65) наружной муфты каждого из первых исполнительных механизмов (8) при вращении соответствующего первого двигателя (9), чтобы приводить стационарную тарелку (11) автомата перекоса нижнего несущего винта в системе приведения во вращение нижнего несущего винта к наклону в определенном направлении и, таким образом, приводить в движение вращающуюся тарелку (24) автомата перекоса нижнего несущего винта, по меньшей мере две нижних тяговых штанги (35) наклонного плеча и по меньшей мере два наклонных плеча (13) зажима лопасти нижнего несущего винта, обеспечивая возможность закручивания зажимных элементов первой лопасти относительно втулки (14) нижнего несущего винта; причем, каждый из первых исполнительных механизмов (8) содержит корпус; при этом обеспечена возможность телескопически выдвигать и задвигать первую резьбовую штангу (65) наружной муфты, при этом один ее конец находится в корпусе, а конец каждой из первых резьбовых штанг (65) наружной муфты, который выступает из корпуса, соединен со стационарной тарелкой (11) автомата перекоса нижнего несущего винта; вращающаяся тарелка (24) автомата перекоса нижнего несущего винта посажена на стационарную тарелку (11) автомата перекоса нижнего несущего винта, при этом стационарная тарелка (11) автомата перекоса нижнего несущего винта соединена с вращающейся тарелкой (24) автомата перекоса нижнего несущего винта через подшипник (57) скольжения нижнего несущего винта, при этом вращающаяся тарелка (24) автомата перекоса нижнего несущего винта и вращающаяся тарелка (11) автомата перекоса нижнего несущего винта выполнены с возможностью вращаться независимо друг от друга; один конец каждого из наклонных плеч (13) зажима лопасти нижнего несущего винта закреплен на заданной монтажной поверхности соответствующего зажимного элемента первой лопасти; один конец каждой из тяговых штанг (35) наклонного плеча соединен с другим концом соответствующего наклонного плеча (13) зажима лопасти нижнего несущего винта; вращающаяся тарелка (24) автомата перекоса нижнего несущего винта соединена с другим концом каждой из тяговых штанг (35) наклонного плеча;
управляют вторым двигателем (49) с обеспечением его вращения в соответствующем втором вращательном состоянии так, чтобы удлинять, укорачивать или оставлять неизменной вторую резьбовую штангу (28) наружной муфты каждого из вторых исполнительных механизмов (58) при вращении соответствующего второго двигателя (49), чтобы приводить стационарную тарелку (3) автомата перекоса верхнего несущего винта в системе приведения во вращение верхнего несущего винта к наклону в определенном направлении и, таким образом, приводить в движение вращающуюся тарелку (4) автомата перекоса верхнего несущего винта, по меньшей мере две L-образные рулевые штанги (47) верхнего несущего винта, по меньшей мере две нижние рулевые штанги (45) верхнего несущего винта, по меньшей мере две тяговых штанги (56) внутри внутреннего вала (15), по меньшей мере две верхние рулевые штанги (40) верхнего несущего винта, по меньшей мере две верхние тяговые штанги (41) наклонного плеча и по меньшей мере два наклонных плеча (42) зажима лопасти верхнего несущего винта, обеспечивая возможность закручивания зажимных элементов второй лопасти относительно втулки (16) верхнего несущего винта; причем каждый из вторых исполнительных механизмов (58) содержит корпус; при этом обеспечена возможность телескопически выдвигать и задвигать вторую резьбовую штангу (28) наружной муфты, при этом один ее конец находится в корпусе, а конец каждой из вторых резьбовых штанг (28) наружной муфты, который выступает из корпуса, соединен со стационарной тарелкой (3) автомата перекоса верхнего несущего винта; стационарная тарелка (3) автомата перекоса верхнего несущего винта соединена с вращающейся тарелкой (4) автомата перекоса верхнего несущего винта, при этом вращающаяся тарелка (4) автомата перекоса верхнего несущего винта и стационарная тарелка (3) автомата перекоса верхнего несущего винта выполнены с возможностью вращения независимо друг от друга; один конец каждого из наклонных плеч (42) зажима лопасти верхнего несущего винта закреплен на заданной монтажной поверхности соответствующего зажимного элемента второй лопасти; при этом один конец каждой из тяговых штанг (41) наклонного плеча соединен с другим концом соответствующего наклонного плеча (42) зажима лопасти верхнего несущего винта; один конец каждой из верхних рулевых штанг (40) верхнего несущего винта соединен с другим концом соответствующей верхней тяговой штанги (41) наклонного плеча; верхняя тяговая втулка (39), соединенная с другим концом каждой из верхних рулевых штанг (40) верхнего несущего винта; один конец каждой из тяговых штанг (56) соединен с соответствующей верхней рулевой штангой (40) верхнего несущего винта через верхнюю тяговую втулку (39); один конец нижней тяговой втулки (64) соединен с другим концом тяговой штанги (56); один конец каждой из нижних рулевых штанг (45) верхнего несущего винта соединен с нижней тяговой втулкой (64) и также соединен с другим концом соответствующей тяговой штанги (56) через нижнюю тяговую втулку (64); один конец каждой из L-образных рулевых штанг (47) верхнего несущего винта соединен с другим концом соответствующей нижней рулевой штанги (45) верхнего несущего винта; вращающаяся тарелка (4) автомата перекоса верхнего несущего винта соединена с другим концом L-образной рулевой штанги (47) верхнего несущего винта;
причем, вращая втулку (14) нижнего несущего винта вместе с наружным валом (19), приводят во вращение вращающуюся тарелку (24) автомата перекоса нижнего несущего винта за счет действия по меньшей мере двух блоков управления нижним несущим винтом в системе приведения во вращение нижнего несущего винта; вращая втулку (16) верхнего несущего винта вместе с внутренним валом (15), приводят во вращение вращающуюся тарелку (4) автомата перекоса верхнего несущего винта за счет действия L-образных рулевых штанг (47) верхнего несущего винта и нижних рулевых штанг (45) верхнего несущего винта; при этом один конец каждого из блоков управления нижним несущим винтом закреплен на втулке (14) нижнего несущего винта, а другой конец закреплен на вращающейся тарелке (24) автомата перекоса нижнего несущего винта;
причем отсутствие вращения стационарной тарелки (11) автомата перекоса нижнего несущего винта вместе с вращающейся тарелкой (24) автомата перекоса нижнего несущего винта обусловлено действием первой антиротационной стойки (25) и первого ползуна (44) в системе приведения во вращение нижнего несущего винта; отсутствие вращения стационарной тарелки (3) автомата перекоса верхнего несущего винта вместе с вращающейся тарелкой (4) автомата перекоса верхнего несущего винта обусловлено действием второй антиротационной стойки (29) и второго ползуна (30) в системе приведения во вращение верхнего несущего винта; при этом один конец первой антиротационной стойки (25) закреплен на верхней крышке (26), а другой конец снабжен сквозным отверстием, при этом первый ползун (44) расположен на стационарной тарелке (11) автомата перекоса нижнего несущего винта и проникает в сквозное отверстие первой антиротационной стойки (25); один конец второй антиротационной стойки (29) закреплен на монтажной плите (2) исполнительных механизмов, а другой конец снабжен сквозным отверстием, при этом второй ползун (30) расположен на стационарной тарелке (3) автомата перекоса верхнего несущего винта и проникает в сквозное отверстие второй антиротационной стойки (29).
2. Способ по п. 1, отличающийся тем, что командами на управление полетом являются:
команда на отрыв, команда на зависание, команда «вперед», команда на реверс, команда «лево руля» или команда «право руля».
3. Способ по п. 1, отличающийся тем, что шаг определения требуемых первых вращательных состояний первых двигателей (9) в соответствии с командой на управление полетом и текущими вращательными состояниями первых двигателей (9) содержит следующее:
определяют текущий угол закручивания, на который повернут каждый из зажимных элементов первой лопасти относительно втулки (14) нижнего несущего винта, в соответствии с текущими вращательными состояниями первых двигателей (9); причем каждый из зажимных элементов первой лопасти однозначно соответствует одному текущему углу закручивания;
определяют требуемый первый угол закручивания, на который повернут каждый из зажимных элементов первой лопасти относительно втулки (14) нижнего несущего винта в соответствии с командой на управление полетом и текущим углом закручивания, на который повернут каждый из зажимных элементов первой лопасти относительно втулки (14) нижнего несущего винта; причем каждый из зажимных элементов первой лопасти однозначно соответствует одному первому углу закручивания;
определяют требуемое первое вращательное состояние каждого из первых двигателей (9) в соответствии с требуемым первым углом закручивания, на который повернут каждый из зажимных элементов первой лопасти относительно втулки (14) нижнего несущего винта;
соответственно, шаг определения требуемых вторых вращательных состояний вторых двигателей (49) в соответствии с командой на управление полетом и текущими вращательными состояниями вторых двигателей (49) содержит следующее:
определяют текущий угол закручивания, на который повернут каждый из зажимных элементов второй лопасти относительно втулки (16) верхнего несущего винта, в соответствии с текущими вращательными состояниями вторых двигателей (49); причем каждый из зажимных элементов второй лопасти однозначно соответствует одному текущему углу закручивания;
определяют требуемый второй угол закручивания, на который повернут каждый из зажимных элементов второй лопасти относительно втулки (16) верхнего несущего винта в соответствии с командой на управление полетом и текущим углом закручивания, на который повернут каждый из зажимных элементов второй лопасти относительно втулки (16) верхнего несущего винта; причем каждый из зажимных элементов второй лопасти однозначно соответствует одному второму углу закручивания;
определяют требуемое второе вращательное состояние каждого из вторых двигателей (49) в соответствии с требуемым вторым углом закручивания, на который повернут каждый из зажимных элементов второй лопасти относительно втулки (16) верхнего несущего винта.
4. Способ по п. 1, отличающийся тем, что команду на управление полетом отправляют с помощью устройства дистанционного управления.
5. Способ по п. 1, отличающийся тем, что команду на управление полетом отправляют через наземную станцию управления.
6. Система приведения во вращение несущих винтов, которая применима к двухвинтовому соосному автономному вертолету, отличающаяся тем, что этот двухвинтовой соосный автономный вертолет содержит:
наружный вал (19);
втулку (14) нижнего несущего винта, закрепленную на внешней стороне одного из концов наружного вала (19);
по меньшей мере два зажимных элемента первой лопасти, соединенных с втулкой (14) нижнего несущего винта, причем каждый из зажимных элементов первой лопасти выполнен с возможностью закручивания относительно втулки (14) нижнего несущего винта и содержит первый зажим (20) лопасти и второй зажим (22) лопасти, причем первый зажим (20) лопасти и второй зажим (22) лопасти совместно зажимают лопасть нижнего несущего винта;
внутренний вал (15);
втулку (16) верхнего несущего винта, закрепленную на внешней стороне одного из концов внутреннего вала (15);
по меньшей мере два зажимных элемента второй лопасти, соединенных с втулкой (16) верхнего несущего винта, причем каждый из зажимных элементов второй лопасти выполнен с возможностью закручивания относительно втулки (16) верхнего несущего винта и содержит третий зажим (17) лопасти и четвертый зажим (18) лопасти, причем третий зажим (17) лопасти и четвертый зажим (18) лопасти совместно зажимают лопасть верхнего несущего винта;
коробку, вмещающую зубчатую передачу и содержащую верхнюю крышку (26), корпус (27) коробки и нижнюю крышку (1), причем зубчатая передача соединена с наружным валом (19) и внутренним валом (15);
синхронный шкив (7), соединенный с зубчатой передачей, причем при вращении синхронного шкива обеспечена возможность приведения во вращение зубчатой передачи таким образом, чтобы были приведены во вращение наружный вал (19) и внутренний вал (15), при этом вращение наружного вала (19) имеет противоположное направление по отношению к внутреннему валу (15), втулка (14) нижнего несущего винта неподвижна относительно наружного вала (19), а втулка (16) верхнего несущего винта неподвижна относительно внутреннего вала (15);
систему приведения во вращение несущих винтов, содержащую систему приведения во вращение верхнего несущего винта и систему приведения во вращение нижнего несущего винта;
устройство для приведения во вращение несущего винта содержит:
модуль приема команд для приема команды на управление полетом;
модуль получения текущих состояний для получения текущих вращательных состояний первых двигателей (9), соответствующих по меньшей мере трем первым исполнительным механизмам (8) в системе приведения во вращение нижнего несущего винта и текущих вращательных состояний вторых двигателей (49), соответствующих по меньшей мере трем вторым исполнительным механизмам (58) в системе приведения во вращение верхнего несущего винта; при этом каждый из первых исполнительных механизмов (8) однозначно соответствует одному первому двигателю (9), каждый из вторых исполнительных механизмов (58) однозначно соответствует одному второму двигателю (59), при этом каждый из первых двигателей (9) однозначно соответствует одному текущему вращательному состоянию, каждый из вторых двигателей (49) однозначно соответствует одному текущему вращательному состоянию;
модуль определения первых вращательных состояний для определения требуемых первых вращательных состояний первых двигателей (9) в соответствии с командой на управление полетом и текущими вращательными состояниями первых двигателей (9); причем каждый из первых двигателей (9) однозначно соответствует одному первому вращательному состоянию;
модуль определения вторых вращательных состояний для определения требуемых вторых вращательных состояний вторых двигателей (49) в соответствии с командой на управление полетом и текущими вращательными состояниями вторых двигателей (49); причем каждый из вторых двигателей (49) однозначно соответствует одному второму вращательному состоянию;
первый модуль управления для управления первым двигателем (9) с обеспечением его вращения в соответствующем первом вращательном состоянии так, чтобы удлинять, укорачивать или оставлять неизменной первую резьбовую штангу (65) наружной муфты каждого из первых исполнительных механизмов (8) при вращении соответствующего первого двигателя (9), чтобы приводить стационарную тарелку (11) автомата перекоса нижнего несущего винта в системе приведения во вращение нижнего несущего винта к наклону в определенном направлении и, таким образом, приводить в движение вращающуюся тарелку (24) автомата перекоса нижнего несущего винта, по меньшей мере две нижних тяговых штанги (35) наклонного плеча и по меньшей мере два наклонных плеча (13) зажима лопасти нижнего несущего винта, обеспечивая возможность закручивания зажимных элементов первой лопасти относительно втулки (14) нижнего несущего винта; причем каждый из первых исполнительных механизмов (8) содержит корпус; при этом обеспечена возможность телескопически выдвигать и задвигать первую резьбовую штангу (65) наружной муфты, при этом один ее конец находится в корпусе, а конец каждой из первых резьбовых штанг (65) наружной муфты, который выступает из корпуса, соединен со стационарной тарелкой (11) автомата перекоса нижнего несущего винта; вращающаяся тарелка 24 автомата перекоса нижнего несущего винта посажена на стационарную тарелку (11) автомата перекоса нижнего несущего винта, при этом стационарная тарелка (11) автомата перекоса нижнего несущего винта соединена с вращающейся тарелкой (24) автомата перекоса нижнего несущего винта через подшипник (57) скольжения нижнего несущего винта, при этом вращающаяся тарелка (24) автомата перекоса нижнего несущего винта и вращающаяся тарелка (11) автомата перекоса нижнего несущего винта имеют возможность вращения независимо друг от друга; один конец каждого из наклонных плеч (13) зажима лопасти нижнего несущего винта закреплен на заданной монтажной поверхности соответствующего зажимного элемента первой лопасти; один конец каждой из тяговых штанг (35) наклонного плеча соединен с другим концом соответствующего наклонного плеча (13) зажима лопасти нижнего несущего винта; вращающаяся тарелка (24) автомата перекоса нижнего несущего винта соединена с другим концом каждой из тяговых штанг (35) наклонного плеча;
второй модуль управления для управления вторым двигателем (49) с обеспечением его вращения в соответствующем втором вращательном состоянии так, чтобы удлинять, укорачивать или оставлять неизменной вторую резьбовую штангу (28) наружной муфты каждого из вторых исполнительных механизмов (58) при вращении соответствующего второго двигателя (49), чтобы приводить стационарную тарелку (3) автомата перекоса верхнего несущего винта в системе приведения во вращение верхнего несущего винта к наклону в определенном направлении и, таким образом, приводить в движение вращающуюся тарелку (4) автомата перекоса верхнего несущего винта, по меньшей мере две L-образные рулевые штанги (47) верхнего несущего винта, по меньшей мере две нижние рулевые штанги (45) верхнего несущего винта, по меньшей мере две тяговых штанги (56) внутри внутреннего вала (15), по меньшей мере две верхние рулевые штанги (40) верхнего несущего винта, по меньшей мере две верхние тяговые штанги (41) наклонного плеча и по меньшей мере два наклонных плеча (42) зажима лопасти верхнего несущего винта, обеспечивая возможность закручивания зажимных элементов второй лопасти относительно втулки (16) верхнего несущего винта; причем каждый из вторых исполнительных механизмов (58) содержит корпус; при этом обеспечена возможность телескопически выдвигать и задвигать вторую резьбовую штангу (28) наружной муфты, при этом один ее конец находится в корпусе, а конец каждой из вторых резьбовых штанг (28) наружной муфты, который выступает из корпуса, соединен со стационарной тарелкой (3) автомата перекоса верхнего несущего винта; стационарная тарелка (3) автомата перекоса верхнего несущего винта соединена с вращающейся тарелкой (4) автомата перекоса верхнего несущего винта, при этом вращающаяся тарелка (4) автомата перекоса верхнего несущего винта и стационарная тарелка (3) автомата перекоса верхнего несущего винта имеют возможность вращения независимо друг от друга; один конец каждого из наклонных плеч (42) зажима лопасти верхнего несущего винта закреплен на заданной монтажной поверхности соответствующего зажимного элемента второй лопасти; при этом один конец каждой из тяговых штанг (41) наклонного плеча соединен с другим концом соответствующего наклонного плеча (42) зажима лопасти верхнего несущего винта; один конец каждой из верхних рулевых штанг (40) верхнего несущего винта соединен с другим концом соответствующей верхней тяговой штанги (41) наклонного плеча; верхняя тяговая втулка (39), соединенная с другим концом каждой из верхних рулевых штанг (40) верхнего несущего винта; один конец каждой из тяговых штанг (56) соединен с соответствующей верхней рулевой штангой (40) верхнего несущего винта через верхнюю тяговую втулку (39); один конец нижней тяговой втулки (64) соединен с другим концом тяговой штанги (56); один конец каждой из нижних рулевых штанг (45) верхнего несущего винта соединен с нижней тяговой втулкой (64) и также соединен с другим концом соответствующей тяговой штанги (56)через нижнюю тяговую втулку (64); один конец каждой из L-образных рулевых штанг (47) верхнего несущего винта соединен с другим концом соответствующей нижней рулевой штанги (45) верхнего несущего винта; вращающаяся тарелка (4) автомата перекоса верхнего несущего винта соединена с другим концом L-образной рулевой штанги (47) верхнего несущего винта;
причем при вращении втулки (14) нижнего несущего винта вместе с наружным валом (19) приведение во вращение вращающейся тарелки (24) автомата перекоса нижнего несущего винта обеспечено за счет действия по меньшей мере двух блоков управления нижним несущим винтом в системе приведения во вращение нижнего несущего винта; при вращении втулки (16) верхнего несущего винта вместе с внутренним валом (15) приведение во вращение вращающейся тарелки (4) автомата перекоса верхнего несущего винта обеспечено за счет действия L-образных рулевых штанг (47) верхнего несущего винта и нижних рулевых штанг (45) верхнего несущего винта; причем один конец каждого из блоков управления нижним несущим винтом закреплен на втулке (14) нижнего несущего винта, а другой конец закреплен на вращающейся тарелке (24) автомата перекоса нижнего несущего винта;
причем вращение стационарной тарелки (11) автомата перекоса нижнего несущего винта вместе с вращающейся тарелкой (24) автомата перекоса нижнего несущего винта предотвращено за счет действия первой антиротационной стойки (25) и первого ползуна (44) в системе приведения во вращение нижнего несущего винта; при этом вращение стационарной тарелки (3) автомата перекоса верхнего несущего винта вместе с вращающейся тарелкой (4) автомата перекоса верхнего несущего винта предотвращено за счет действия второй антиротационной стойки (29) и второго ползуна (30) в системе приведения во вращение верхнего несущего винта; при этом, один конец первой антиротационной стойки (25) закреплен на верхней крышке (26), а другой конец снабжен сквозным отверстием, при этом первый ползун (44) расположен на стационарной тарелке (11) автомата перекоса нижнего несущего винта и проникает в сквозное отверстие первой антиротационной стойки (25); один конец второй антиротационной стойки (29) закреплен на монтажной плите (2) исполнительных механизмов, а другой конец снабжен сквозным отверстием, при этом, второй ползун (30) расположен на стационарной тарелке (3) автомата перекоса верхнего несущего винта и проникает в сквозное отверстие второй антиротационной стойки (29).
7. Устройство по п. 6, отличающееся тем, что модуль определения первых вращательных состояний содержит:
блок определения текущих углов закручивания для определения текущего угла закручивания, на который повернут каждый из зажимных элементов первой лопасти относительно втулки (14) нижнего несущего винта, в соответствии с текущими вращательными состояниями первых двигателей (9); причем каждый из зажимных элементов первой лопасти однозначно соответствует одному текущему углу закручивания;
блок определения первых углов закручивания для определения требуемого первого угла закручивания, на который повернут каждый из зажимных элементов первой лопасти относительно втулки (14) нижнего несущего винта в соответствии с командой на управление полетом и текущим углом закручивания, на который повернут каждый из зажимных элементов первой лопасти относительно втулки (14) нижнего несущего винта; причем каждый из зажимных элементов первой лопасти однозначно соответствует первому текущему углу закручивания;
блок определения первых вращательных состояний для определения требуемого первого вращательного состояния каждого из первых двигателей (9) в соответствии с требуемым первым углом закручивания, на который повернут каждый из зажимных элементов первой лопасти относительно втулки (14) нижнего несущего винта;
соответственно, модуль определения вторых вращательных состояний содержит:
блок определения текущих углов закручивания для определения текущего угла закручивания, на который повернут каждый из зажимных элементов второй лопасти относительно втулки (16) верхнего несущего винта, в соответствии с текущими вращательными состояниями вторых двигателей (49); причем каждый из зажимных элементов второй лопасти однозначно соответствует одному текущему углу закручивания;
блок определения вторых углов закручивания для определения требуемого второго угла закручивания, на который повернут каждый из зажимных элементов второй лопасти относительно втулки (16) верхнего несущего винта в соответствии с командой на управление полетом и текущим углом закручивания, на который повернут каждый из зажимных элементов второй лопасти относительно втулки (16) верхнего несущего винта; причем каждый из зажимных элементов второй лопасти однозначно соответствует одному второму углу закручивания;
блок определения вторых вращательных состояний для определения требуемого второго вращательного состояния каждого из вторых двигателей (49) в соответствии с требуемым вторым углом закручивания, на который повернут каждый из зажимных элементов второй лопасти относительно втулки (16) верхнего несущего винта.
| СИСТЕМА ДВУХ СООСНЫХ НЕСУЩИХ ВИНТОВ ЛЕТАТЕЛЬНОГО АППАРАТА | 1999 |
|
RU2155702C1 |
| EP 1944234 A1, 16.07.2008 | |||
| CN 103318407 A, 25.09.2013 | |||
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ДВУМЯ ВОЗДУШНЫМИ ВИНТАМИ ПРОТИВОПОЛОЖНОГО ВРАЩЕНИЯ НА ВЕРТИКАЛЬНОЙ ОСИ | 2009 |
|
RU2520263C2 |
| US 4367063 A1, 04.01.1983. | |||

