Предлагаемое изобретение относится к области авиационной техники, а именно к системам несущих винтов летательных аппаратов.
Известны системы соосных несущих винтов, служащие для создания подъемной силы и для управления летательным аппаратом, реализованные на вертолетах Ка-26, Ка-32 и описанные в руководствах по технической эксплуатации этих вертолетов, изданных фирмой Открытого Акционерного Общества "Камов".
Несущие системы соосных вертолетов имеют большие габариты по высоте, так как для исключения возможности соударения лопастей, вращающихся в разных направлениях верхнего и нижнего несущих винтов, их разносят по высоте на величину, равную 0,2R-радиуса винта (см. Л.С. Вильдгрубе, стр. 26, "ВЕРТОЛЕТЫ расчет интегральных аэродинамических характеристик и летно-технических данных", - М. Машиностроение, 1977 г.), то есть, для вертолета Ка-26 с диаметром несущего винта 13 м увеличение габаритного размера по высоте составляет 1,3 м, для Ка-32 эта величина составляет 1,6 м.
Относительно большой габаритный размер по высоте у вертолетов с соосной несущей системой по сравнению с одновинтовыми вертолетами такой же грузоподъемности усложняет их обслуживание при эксплуатации, для них требуются высокие помещения - ангары, что особенно трудно выполнимо при базировании соосных вертолетов на корабле, более того большой размер по высоте приводит к необходимости демонтажа главного редуктора при транспортировке соосного вертолета с последующей сборкой, повторным проведением контрольно-испытательных полетов.
Наиболее близким решением из известных является система соосных несущих винтов вертолета Ка-32, содержащая редуктор с двумя соосными валами, вращающимися в противоположных направлениях, на которых закреплены втулки несущих винтов, также содержащая цепи управления каждым из несущих винтов, включающие два автомата перекоса - нижний и верхний, две ползушки - нижнюю и верхнюю, механизм общего и дифференциального шага и тяги, связывающие эти агрегаты, причем автомат перекоса нижний - нижнего несущего винта - установлен неподвижно на верхней части редуктора под нижним несущим винтом и с осевыми шарнирами лопастей нижнего несущего винта связан тягами через качалки нижней ползушки, а автомат перекоса верхний - верхнего несущего винта - установлен на валу редуктора в пространстве между верхним и нижним несущими винтами и связан с нижним автоматом перекоса обеспечивающими их параллельность тягами. Верхний автомат перекоса связан тягами через качалки верхней ползушки с осевыми шарнирами лопастей верхнего несущего винта. Ползушки - нижняя и верхняя - установлены на валу верхнего несущего винта, в пространстве между верхним и нижним винтами, и связаны, посредством болтов в прорезях вала и тяг, пропущенных внутри вала, с рычажно-винтовым механизмом, управляющим общим и дифференциальным шагом несущих винтов, установленным в нижней части редуктора.
У прототипа - несущей системы вертолета Ка-32 - так же, как и у других известных несущих систем соосных вертолетов, верхний несущий винт вынесен высоко вверх и не подлежит уборке в нерабочем состоянии, что вызывает трудности при эксплуатации вертолета, а также приводит к необходимости демонтировать главный редуктор при транспортировании вертолета.
Целью предлагаемого изобретения является обеспечение возможности уменьшения габаритного размера по высоте соосного вертолета, при стояночном положении или при его транспортировании за счет складывания несущей системы по высоте путем осевого перемещения вниз вала верхнего несущего винта до упора его втулки о втулку нижнего винта и, наоборот, обеспечение возможности раскладывания - восстановления рабочего положения несущей системы путем осевого перемещения вверх вала верхнего винта и приведения несущей системы в исходное рабочее положение без каких-либо регулировок.
Указанная цель достигается тем, что в системе двух соосных несущих винтов летательного аппарата, содержащей редуктор с двумя соосными валами, вращающимися в противоположных направлениях, на которых закреплены втулки несущих винтов, а также содержащей цепи управления каждым из несущих винтов, включающие два автомата перекоса и механизм управления общим и дифференциальным шагом несущих винтов, вал верхнего несущего винта редуктора выполнен с возможностью осевого перемещения относительно своих опор и приводной шестерни редуктора, при этом управление несущими винтами выполнено таким образом, что снаружи вала редуктора верхнего несущего винта, в пространстве между верхним и нижним винтами, отсутствуют какие-либо элементы конструкции вследствие того, что автомат перекоса верхнего несущего винта расположен в нижней части корпуса редуктора, выполнен с возможностью своего осевого перемещения относительно редуктора и связан быстроразъемными соединениями с тягами управления лопастями верхнего несущего винта, проведенными внутри вала верхнего несущего винта, автомат перекоса нижнего несущего винта расположен в верхней части корпуса редуктора с возможностью своего осевого перемещения и связан тягами с осевыми шарнирами лопастей нижнего несущего винта, а для осевого перемещения автоматов перекоса, с целью управления общим и дифференциальным шагом несущих винтов, применен рычажный параллелограмно-суммирующий механизм.
На фиг. 1 изображена предложенная система двух соосных несущих винтов в рабочем положении вертолета - вал верхнего несущего винта в поднятом вверх положении.
В редукторе 1 на подшипниковых опорах 2 установлен полый вал 3, на котором сверху закреплена втулка 4 нижнего несущего винта, на которой установлены осевые шарниры 27 лопастей нижнего несущего винта. На валу 3 закреплена шестерня, передающая ему вращение от шестерен редуктора. Внутри вала 3 расположен полый вал 5 с втулкой 6 верхнего несущего винта. Вал 5 установлен с подвижной посадкой, со шлицевым соединением в гильзе 7, являющейся опорой вала, гильза 7 опирается на подшипники 8, при этом гильза 7 является одновременно и ступицей шестерни, которая валу 5 через шлицы передает вращение от шестерен редуктора. Вал 5 от осевого перемещения вверх фиксируется упором буртика в нижний торец гильзы, от перемещения вниз упором фиксаторов 9 вала в пазах гильзы. На верхней части корпуса редуктора установлен автомат перекоса 10 нижнего несущего винта с возможностью его осевого перемещения в шлицах корпуса редуктора, кольцо управления 19 автомата перекоса связано тягами 11 с осевыми шарнирами лопастей втулки нижнего несущего винта. На нижней части корпуса редуктора, также на шлицах и с возможностью осевого перемещения установлен автомат перекоса 12 верхнего несущего винта, кольцо управления 18 которого своими тягами 13 через качалки 14 и далее тяги 15, проведенные внутри вала 5, через качалки 16 и тяги 17 связано с осевыми шарнирами 28 лопастей втулки верхнего несущего винта. Кольца управления 18 верхнего и 19 нижнего автоматов перекоса соединены между собой тягами 37, (38 - не показана) и связаны тягами 39, 40 с механизмом продольно-поперечного управления 25 и с ручкой управления циклическим шагом 26. Подвижные стаканы 20 верхнего и 21 нижнего автоматов перекоса связаны при помощи рычагов 41, 42 с рычажным параллелограмно-суммирующим механизмом 22, управляющим общим и дифференциальным шагом обоих несущих винтов. Через этот механизм стаканы 20, 21 связаны с педалями 32 путевого управления и с рычагом "шаг-газ" 29 управления общего шага несущих винтов. Соединения тяг 13 с качалками 14 выполнены быстроразъемной конструкции, в этих соединениях оси 23 выполнены с лысками, а проушины качалок 14 имеют прорези по ширине, равной высоте лысок на осях, через которые оси могут вставляться в проушины качалок, кроме того, головки осей имеют вырезы, которыми оси фиксируются при помощи фиксаторов 24 в одном из двух положений "открыто" либо "закрыто".
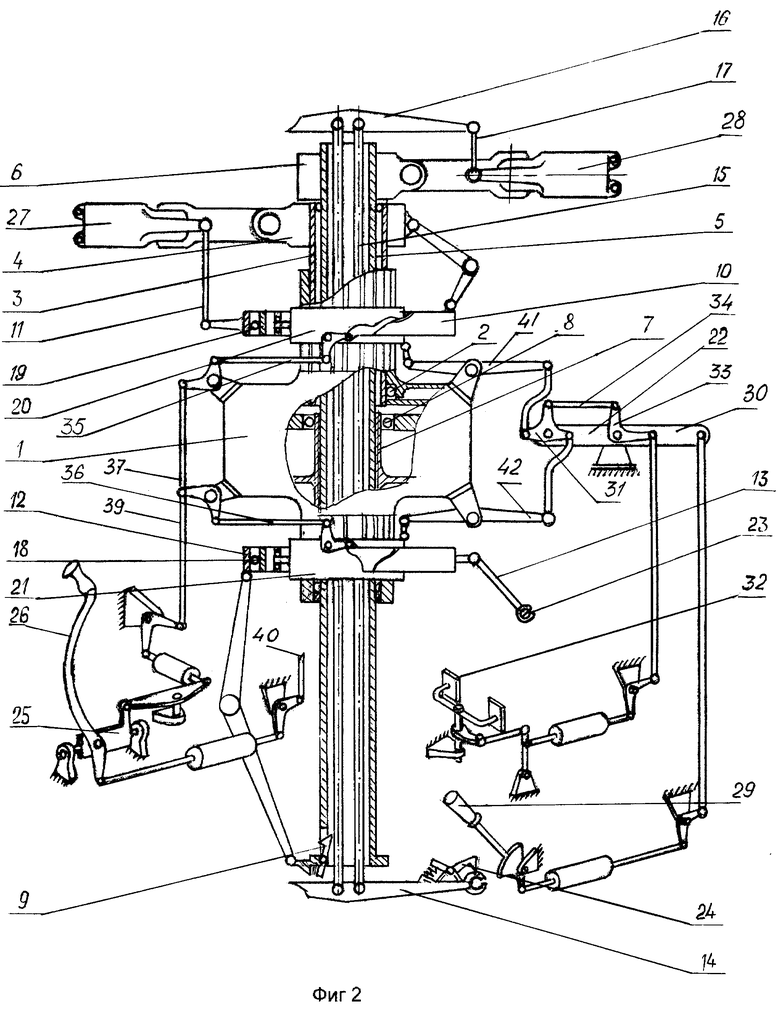
На фиг.2, изображена несущая система в сложенном по высоте положении.
Складывание несущей системы по высоте осуществляется за счет осевого перемещения вниз вала верхнего винта редуктора следующим образом.
Сначала рассоединяют шарнирные связи тяг 13 от автомата перекоса верхнего несущего винта с качалками 14 (количество таких связей, подлежащих рассоединению - соединению, равно количеству лопастей у верхнего несущего винта), для чего отжимаются пружинные фиксаторы 24, фиксирующие оси 23 тяг 13 в положении "закрыто", и головки осей поворачивают на 90o в положение "открыто", при этом лыски на осях располагаются вдоль направления прорезей в проушинах качалок и тяги 13 выводят из соединения с качалками 14, затем, отжимая подпружиненные фиксаторы 9, фиксирующие верхнее рабочее положение вала 5, выводят их из пазов в гильзе 7 редуктора, и опускают вал в шлицах гильзы до упора втулки 6 верхнего несущего винта о втулку 4 нижнего несущего винта.
Раскладывание - приведение несущей системы в рабочее положение - осуществляется в обратной последовательности.
Поднимается вал 5 верхнего несущего винта до упора своим буртиком в край гильзы 7, при этом фиксаторы 9 вала под действием своих пружин заходят в пазы гильзы и стопорят вал 5 от осевого перемещения вниз, после этого вставляют оси 23 тяг 13 через прорези в проушинах качалок 14 и поворачивают головки осей 23 в фиксируемое положение "закрыто", при этом фиксаторы 24 под действием своих пружин заходят в вырезы на головках осей и стопорят оси 23 от поворачивания, оси будут повернуты лысками на невыпадение, то есть лыски на осях расположатся перпендикулярно направлению пазов в проушинах качалок, после этого несущая система приведена в рабочее положение.
Уменьшение высоты несущей системы соосного вертолета за счет складывания несущей системы по высоте путем осевого перемещения вниз вала верхнего несущего винта до упора его втулки о втулку нижнего винта и, наоборот, обеспечение возможности раскладывания - восстановления рабочего положения несущей системы путем осевого перемещения вверх вала верхнего винта и приведения несущей системы в исходное рабочее положение без каких-либо регулировок упрощает обслуживание соосного вертолета при эксплуатации, а учитывая что соосные вертолеты широко используются с базированием на кораблях, уменьшение высоты при относительно малых размерах по длине и ширине упрощает решение проблемы их размещения на корабле. Кроме того, при транспортировке соосных вертолетов с несущей системой, выполненной по предлагаемому изобретению, исключается необходимость демонтажа с вертолета главного редуктора, что позволяет использовать вертолет по его назначению сразу же после выгрузки из транспортного средства - это особенно важно в случае транспортировки вертолета к месту чрезвычайной ситуации.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВУХВИНТОВАЯ СООСНАЯ НЕСУЩАЯ СИСТЕМА С ЗЕРКАЛЬНЫМ РАСПОЛОЖЕНИЕМ АВТОМАТОВ ПЕРЕКОСА | 2007 |
|
RU2383470C2 |
| СИСТЕМА УПРАВЛЕНИЯ СООСНЫМ ВЕРТОЛЕТОМ | 2015 |
|
RU2613136C1 |
| Соосный несущий винт винтокрылого летательного аппарата | 2021 |
|
RU2756861C1 |
| СООСНАЯ НЕСУЩАЯ СИСТЕМА | 2019 |
|
RU2726560C1 |
| СООСНАЯ НЕСУЩАЯ СИСТЕМА | 2009 |
|
RU2412081C1 |
| ВЕРТОЛЕТ С СООСНЫМИ НЕСУЩИМИ ВИНТАМИ | 2004 |
|
RU2265554C1 |
| СИСТЕМА ДВУХ СООСНЫХ НЕСУЩИХ ВИНТОВ ЛЕТАТЕЛЬНОГО АППАРАТА | 2019 |
|
RU2709081C1 |
| СООСНАЯ НЕСУЩАЯ СИСТЕМА | 2020 |
|
RU2751168C1 |
| СПОСОБ УПРАВЛЕНИЯ НЕСУЩИМ ВИНТОМ ВИНТОКРЫЛОГО ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2371351C2 |
| СПОСОБ УПРАВЛЕНИЯ НЕСУЩИМ ВИНТОМ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2000 |
|
RU2203835C2 |
Изобретение относится авиационной технике, а именно к системам несущих винтов летательных аппаратов. Система двух соосных несущих винтов летательного аппарата содержит редуктор с двумя соосными валами, втулки несущих винтов, цепи управления винтами, два автомата перекоса и механизм управления общим и дифференциальным шагом несущих винтов. Вал верхнего несущего винта выполнен с возможностью осевого перемещения вниз и с возможностью приведения несущей системы в исходное положение без регулировок. Система обеспечивает уменьшение габаритного размера по высоте соосного вертолета при стояночном положении или транспортировке. 2 ил.
Система двух соосных несущих винтов летательного аппарата, содержащая редуктор с двумя соосными валами, вращающимися в противоположных направлениях, на которых закреплены втулки несущих винтов, содержащая также цепи управления каждым из несущих винтов, включающие два автомата перекоса и механизм управления общим и дифференциальным шагом несущих винтов, отличающаяся тем, что, с целью уменьшения габаритного размера по высоте соосного вертолета при его нерабочем стояночном или транспортируемом положении и обеспечения возможности восстановления рабочего положения вертолета без каких-либо регулировок, вал верхнего несущего винта редуктора выполнен с возможностью своего осевого перемещения относительно опор и приводной шестерни редуктора, при этом управление несущими винтами выполнено таким образом, что снаружи вала, в пространстве между верхним и нижним несущими винтами отсутствуют какие-либо элементы конструкции вследствие того, что автомат перекоса верхнего несущего винта расположен в нижней части корпуса редуктора, выполнен с возможностью своего осевого перемещения относительно редуктора и связан быстроразъемными соединениями с тягами управления лопастями верхнего несущего винта, проведенными внутри вала верхнего несущего винта, автомат перекоса нижнего несущего винта расположен в верхней части корпуса редуктора с возможностью своего осевого перемещения и связан тягами с осевыми шарнирами лопастей нижнего несущего винта, а для осевого перемещения автоматов перекоса с целью управления общим дифференциальным шагом несущих винтов применен рычажный параллелограммно-суммирующий механизм.
| US 3592559 A, 13.07.1971 | |||
| US 3912199 A, 14.10.1975 | |||
| СУРИКОВ Н.Ф | |||
| и др | |||
| Прибор для получения стереоскопических впечатлений от двух изображений различного масштаба | 1917 |
|
SU26A1 |
| - М.: Транспорт, 1982, с.107 - 110, рис.57. | |||

