Область техники
Настоящее изобретение относится к области двухвинтового автономного вертолета соосной схемы, в частности, к приводной системе несущих винтов.
Уровень техники
Так называемый «двухвинтовой автономный вертолет соосной схемы» может содержать верхний несущий винт и нижний несущий винт одинаковой конструкции, причем ведущий вал образован внутренним валом и наружным валом, вращающимся в противоположном направлении относительно указанного внутреннего вала, причем верхний несущий винт установлен на одном конце внутреннего вала, а нижний несущий винт установлен на одном конце наружного вала, при этом верхний несущий винт расположен на заданном расстоянии от нижнего несущего винта, причем верхний несущий винт вращается совместно с внутренним валом, а нижний несущий винт вращается совместно с наружным валом так, что обеспечена возможность вращения нижнего несущего винта в противоположном направлении относительно верхнего несущего винта, в результате чего крутящие моменты, создаваемые верхним и нижним несущими винтами, могут уравновешивать друг друга в режиме полета, когда курс не меняется без установки хвостового винта и хвостовой балки, при этом управление курсом можно реализовать посредством неуравновешенных крутящих моментов, возникающих в результате разницы общего шага верхнего и нижнего несущих винтов.
Известная из уровня техники конструкция приводной системы несущих винтов, позволяющая управлять курсом двухвинтового автономного вертолета соосной схемы, отличается высокой сложностью, что приводит к низкой эффективности процесса и неудобству при проведении испытаний и технического обслуживания.
Сущность изобретения
С учетом описанных выше недостатков, в предпочтительных вариантах осуществления настоящего изобретения предложена приводная система несущих винтов, которая имеет упрощенную конструкцию, что позволяет решить проблемы, связанные с неудобством при проведении испытаний и технического обслуживания. Ниже представлены предложенные технические решения.
В одном из предпочтительных вариантов осуществления настоящего изобретения предложена приводная система несущих винтов, применимая в отношении двухвинтового автономного вертолета соосной схемы, причем указанный двухвинтовой автономный вертолет соосной схемы содержит: наружный вал 19;
втулку 14 нижнего несущего винта, закрепленную с наружной стороны одного конца наружного вала 19;
по меньшей мере два первых зажимных элемента лопасти, соединенных с втулкой 14 нижнего несущего винта, причем каждый из указанных первых зажимных элементов лопасти выполнен с возможностью кручения относительно втулки 14 нижнего несущего винта и содержит первый зажим 20 лопасти и второй зажим 22 лопасти, причем указанный первый зажим 20 лопасти и указанный второй зажим 22 лопасти совместно зажимают лопасть нижнего несущего винта;
внутренний вал 15;
втулку 16 верхнего несущего винта, закрепленную с наружной стороны одного конца внутреннего вала 15;
по меньшей мере два вторых зажимных элемента лопасти, соединенных с втулкой 16 верхнего несущего винта, причем каждый из указанных вторых зажимных элементов лопасти выполнен с возможностью кручения относительно втулки 16 верхнего несущего винта и содержит третий зажим 17 лопасти и четвертый зажим 18 лопасти, причем указанный третий зажим 17 лопасти и указанный четвертый зажим 18 лопасти совместно зажимают лопасть верхнего несущего винта;
коробку, вмещающую в себя зубчатую передачу и содержащую верхнюю крышку 26, корпус 27 коробки и нижнюю крышку 1, причем указанная зубчатая передача соединена с наружным валом 19 и внутренним валом 15;
синхронный шкив 7, соединенный с указанной зубчатой передачей, причем вращение синхронного шкива 7 приводит указанную зубчатую передачу во вращение для приведения во вращения наружного вала 19 и внутреннего вала 15, причем наружный вал (19) выполнен с возможностью вращения в противоположном направлении относительно внутреннего вала (15), причем втулка 14 нижнего несущего винта установлена неподвижно относительно наружного вала 19, а втулка 16 верхнего несущего винта установлена неподвижно относительно внутреннего вала 15;
причем указанная приводная система несущих винтов содержит приводную систему верхнего несущего винта и приводную систему нижнего несущего винта,
причем приводная система нижнего несущего винта может содержать:
по меньшей мере два наклонных рычага 13 зажима лопасти нижнего несущего винта, один конец каждого из которых закреплен на заданной монтажной поверхности соответствующего первого зажимного элемента лопасти;
по меньшей мере две нижние тяговые штанги 35 наклонного рычага, один конец каждой из которых соединен с другим концом соответствующего наклонного рычага 13 зажима лопасти нижнего несущего винта; несущую башню 10, которая надета на наружный вал 19 одним концом, закрепленным на наружной крышке 26;
вращающуюся тарелку 24 автомата перекоса нижнего несущего винта, которая надета на стационарную тарелку 11 автомата перекоса нижнего несущего винта и соединена с другим концом каждой из указанных нижних тяговых штанг 35 наклонного рычага;
по меньшей мере два блока управления нижнего несущего винта, один конец каждого из которых соединен с втулкой 14 нижнего несущего винта, а другой конец - соединен с вращающейся тарелкой 24 автомата перекоса нижнего несущего винта для приведения во вращение указанной вращающейся тарелки 24 автомата перекоса нижнего несущего винта при вращении втулки 14 нижнего несущего винта с наружным валом 19;
стационарную тарелку 11 автомата перекоса нижнего несущего винта, которая надета на указанную несущую башню 10 посредством подшипника 57 скольжения нижнего несущего винта и соединена с вращающейся тарелкой 24 автомата перекоса нижнего несущего винта посредством подшипника 57 скольжения нижнего несущего винта, причем вращающаяся тарелка 24 автомата перекоса нижнего несущего винта и стационарная тарелка 11 автомата перекоса нижнего несущего винта выполнены с возможностью вращения независимо друг от друга;
монтажное основание 2 исполнительного механизма, жестко соединенное с нижней крышкой 1;
по меньшей мере три первых исполнительных механизма 8, установленных на указанном монтажном основании 2 исполнительного механизма, причем каждый из указанных первых исполнительных механизмов 8 может содержать корпус, и первые трубчатые штанги 65 резьбового стержня, одним своим концом расположенные в указанном корпусе, причем указанные первые трубчатые штанги 65 резьбового стержня выполнены с возможностью выдвижения вверх и вниз, при этом конец каждой из первых трубчатых штанг 65 резьбового стержня, выступающий из указанного корпуса, соединен с стационарной тарелкой автомата перекоса нижнего несущего винта с тем, чтобы обеспечить наклон указанной стационарной тарелки 11 автомата перекоса нижнего несущего винта в конкретном направлении при выдвижении вверх и вниз первой трубчатой штанги 65 резьбового стержня и, тем самым, обеспечить наклон вращающейся тарелки (24) автомата перекоса нижнего несущего винта в конкретном направлении;
по меньшей мере три первых электродвигателя 9, каждый из которых соединен с соответствующим первым исполнительным механизмом 8 и управляет первой трубчатой штангой 65 резьбового стержня соответствующего первого исполнительного механизма 8 для ее выдвижения вверх и вниз; первый запорный стержень 25, один конец которого закреплен в месте, отличном от места крепления несущей башни 10, на верхней крышке 26, а в другом конце которого предусмотрено сквозное отверстие;
первый ползун 44, расположенный на стационарной тарелке 11 автомата перекоса нижнего несущего винта и входящий в указанное сквозное отверстие первого запорного стержня 25 для обеспечения возможности наклона стационарной тарелки 11 автомата перекоса нижнего несущего винта в конкретном направлении и блокировки ее вращения совместно с вращающейся тарелкой 24 автомата перекоса нижнего несущего винта;
причем приводная система верхнего несущего винта может содержать:
по меньшей мере два наклонных рычага 42 зажима лопасти верхнего несущего винта, один конец каждого из которых закреплен на заданной монтажной поверхности соответствующего второго зажимного элемента лопасти;
по меньшей мере две верхние тяговые штанги 41 наклонного рычага, один конец каждой из которых соединен с другим концом соответствующего наклонного рычага 42 зажима лопасти верхнего несущего винта;
по меньшей мере две верхние рулевые тяги 40 верхнего несущего винта, один конец каждой из которых соединен с другим концом соответствующей верхней тяговой штанги 41 наклонного рычага;
верхнюю пробку 39 тяговой штанги, соединенную с другим концом каждой из верхних рулевых тяг 40 верхнего несущего винта;
по меньшей мере две тяговые штанги 56, расположенные внутри внутреннего вала 15, один конец каждой из которых соединен с соответствующей верхней рулевой тягой 40 верхнего несущего винта посредством указанной верхней пробки 39 тяговой штанги;
нижнюю пробку 64 тяговой штанги;
по меньшей мере две нижние рулевые тяги 45 верхнего несущего винта, один конец каждой из которых соединен с указанной нижней пробкой 64 тяговой штанги и соединен с другим концом соответствующей тяговой штанги 56 посредством указанной нижней пробки 56 тяговой штанги;
по меньшей мере два L-образных рычага 47 рулевой тяги верхнего несущего винта, причем один конец каждого из указанных L-образных рычагов 47 рулевой тяги верхнего несущего винта соединен с другим концом соответствующей нижней рулевой тяги 45 верхнего несущего винта;
подвижную штангу 46 тарелки автомата перекоса верхнего несущего винта;
вращающуюся тарелку 4 автомата перекоса верхнего несущего винта, которая надета на указанную подвижную штангу 46 вращающейся тарелки автомата перекоса верхнего несущего винта посредством подшипника 59 скольжения верхнего несущего винта и соединена с другим концом L-образного рычага 47 рулевой тяги верхнего несущего винта так, что обеспечена возможность приведения указанной вращающейся тарелки 4 автомата перекоса верхнего несущего винта во вращение под действием L-образных рычагов 47 рулевой тяги верхнего несущего винта и нижней рулевой тяги 45 верхнего несущего винта при вращении втулки 16 верхнего несущего винта совместно с внутренним валом 15;
стационарную тарелку 3 автомата перекоса верхнего несущего винта, которая надета на указанную вращающуюся тарелку 4 автомата перекоса верхнего несущего винта, причем указанная вращающаяся тарелка 4 автомата перекоса верхнего несущего винта и стационарная тарелка 3 автомата перекоса верхнего несущего винта выполнены с возможностью вращения независимо друг от друга;
по меньшей мере три вторых исполнительных механизма 58, установленных на указанной верхней крышке 26, причем каждый из вторых исполнительных механизмов 58 может содержать корпус, и вторую трубчатую штангу 28 резьбового стержня, одним своим концом расположенную в указанном корпусе, причем указанная вторая трубчатая штанга 28 резьбового стержня выполнена с возможностью выдвижения вверх и вниз, при этом конец каждой второй трубчатой штанги 28 резьбового стержня, выступающий из указанного корпуса, соединен с стационарной тарелкой 3 автомата перекоса верхнего несущего винта с тем, чтобы обеспечить наклон указанной стационарной тарелки 3 автомата перекоса верхнего несущего винта в конкретном направлении при выдвижении вверх и вниз указанной второй трубчатой штанги 28 резьбового стержня и, тем самым, обеспечить наклон вращающейся тарелки 4 автомата перекоса верхнего несущего винта в конкретном направлении;
по меньшей мере три вторых электродвигателя 49, каждый из которых соединен со второй трубчатой штангой 28 резьбового стержня соответствующего второго исполнительного механизма 58 и управляет второй трубчатой штангой 28 резьбового стержня соответствующего второго исполнительного механизма 58 для ее выдвижения вверх и вниз;
второй запорный стержень 29, один конец которого закреплен на указанном монтажном основании 2 исполнительного механизма, а в другом конце которого предусмотрено сквозное отверстие;
второй ползун 30, расположенный на стационарной тарелке 3 автомата перекоса верхнего несущего винта и входящий в указанное сквозное отверстие второго запорного стержня 29 для обеспечения возможности наклона стационарной тарелки 3 автомата перекоса верхнего несущего винта в конкретном направлении и блокировки ее вращения совместно с вращающейся тарелкой 4 автомата перекоса верхнего несущего винта.
Приводная система верхнего несущего винта предпочтительно содержит:
верхнюю раму 37 внутреннего вала, соединенную с каждой из верхних рулевых тяг 40 верхнего несущего винта для обеспечения опоры каждой из верхних рулевых тяг 40 верхнего несущего винта без влияния на их вращение, причем один конец указанной верхней рамы 37 внутреннего вала прикреплен к концу внутреннего вала 15, на котором установлена втулка 15 верхнего несущего винта;
нижнюю раму 31 внутреннего вала, соединенную с каждой из нижних рулевых тяг 45 верхнего несущего винта для обеспечения опоры каждой из нижних рулевых тяг 45 верхнего несущего винта без влияния на их вращение, причем один конец указанной нижней рамы 31 внутреннего вала прикреплен к внутреннему валу 15, а другой ее конец соединен с концом подвижной штанги 46 наклонной тарелки нижнего несущего винта, на которой установлена вращающаяся тарелка 4 автомата перекоса верхнего несущего винта.
Приводная система нижнего несущего винта предпочтительно может дополнительно содержать:
по меньшей мере три первых редуктора 5, каждый из которых соединен с соответствующим первым электродвигателем 9, причем выходная частота вращения соответствующего первого электродвигателя 9 регулируется каждым из указанных первых редукторов 5;
причем соответствующим образом приводная система верхнего несущего винта может дополнительно содержать: по меньшей мере три вторых редуктора 43, каждый из которых соединен с соответствующим вторым электродвигателем 49, причем выходная частота вращения соответствующего второго электродвигателя 49 регулируется каждым из указанных вторых редукторов 5.
Первый редуктор 5 и второй редуктор 43 предпочтительно представляют собой редуктор зубчатого типа или редуктор цепного типа.
Ширина одного конца наклонного рычага 13 зажима лопасти нижнего несущего винта, закрепленного на первом зажимном элементе лопасти, предпочтительно превышает ширину другого конца наклонного рычага 13 зажима лопасти нижнего несущего винта, причем ширина одного конца наклонного рычага 42 зажима лопасти верхнего несущего винта, закрепленного на втором зажимном элементе лопасти, предпочтительно превышает ширину другого конца наклонного рычага 42 зажима лопасти верхнего несущего винта.
Каждый из блоков управления нижнего несущего винта предпочтительно образован запорной тарелкой 21 и L-образным рычагом 23 рулевой тяги нижнего несущего винта, причем один конец указанной запорной тарелки 21 соединен с одним концом L-образного рычага 23 рулевой тяги нижнего несущего винта, а другой конец указанной запорной тарелки 21 соединен с втулкой 14 нижнего несущего винта, а другой конец L-образного рычага 23 рулевой тяги нижнего несущего винта соединен с вращающейся тарелкой 24 автомата перекоса нижнего несущего винта.
Первый ползун 44 предпочтительно входит в сквозное отверстие первого запорного стержня 25, но не выходит наружу из указанного сквозного отверстия; в качестве альтернативы, указанный первый ползун 44 входит в указанное сквозное отверстие первого запорного стержня 25 и выходит наружу из указанного сквозного отверстия.
Второй ползун 30 предпочтительно входит в сквозное отверстие второго запорного стержня 29, но не выходит наружу из указанного сквозного отверстия; в качестве альтернативы, указанный второй ползун 30 входит в указанное сквозное отверстие второго запорного стержня 29 и выходит наружу из указанного сквозного отверстия.
В предлагаемом техническом решении, по меньшей мере три первых исполнительных механизма 8 выполнены с возможность обеспечения наклона стационарной тарелки 11 автомата перекоса нижнего несущего винта в конкретном направлении путем взаимодействия друг с другом (при удлинении, укорочении или неподвижном состоянии первой трубчатой штанги 65 резьбового стержня) так, что вращающаяся тарелка 24 автомата перекоса нижнего несущего винта, нижние тяговые штанги 35 наклонного рычага и наклонные рычаги 13 зажима лопасти нижнего несущего винта все находятся в движении, тем самым, обеспечивая кручение первых зажимных элементов лопасти относительно втулки 14 нижнего несущего винта; по меньшей мере три вторых исполнительных механизма 58 выполнены с возможность обеспечения наклона стационарной тарелки 3 автомата перекоса верхнего несущего винта в конкретном направлении путем взаимодействия друг с другом (при удлинении, укорочении или неподвижном состоянии второй трубчатой штанги 28 резьбового стержня) так, что вращающаяся тарелка 4 автомата перекоса верхнего несущего винта, L-образные рычаги 47 рулевой тяги верхнего несущего винта, нижние рулевые тяги 45 верхнего несущего винта, тяговые штанги 56, верхние рулевые тяги 40 верхнего несущего винта, верхние тяговые штанги 41 наклонного рычага и наклонные рычаги 42 зажима лопасти верхнего несущего винта все находятся в движении, обеспечивая, тем самым, кручение вторых зажимных элементов лопасти относительно втулки 16 верхнего несущего винта. Таким образом, в предлагаемом решении, приводная система несущих винтов имеет упрощенную конструкцию, что позволяет решить проблемы, связанные с низкой эффективностью процесса и неудобством при проведении испытаний и технического обслуживания.
Краткое описание чертежей
Для того что нагляднее раскрыть предпочтительные варианты осуществления настоящего изобретения или технические решения, известные из уровня техники, ниже приведено подробное описание чертежей, используемых для иллюстрации предпочтительных вариантов осуществления или известных технических решений. Очевидно, что чертежи, на которые даны ссылки в нижеследующем описании, иллюстрируют лишь некоторые предпочтительные варианты осуществления настоящего изобретения. При этом специалист в данной области техники также способен без творческих усилий создать дополнительные чертежи на основании прилагаемых чертежей.
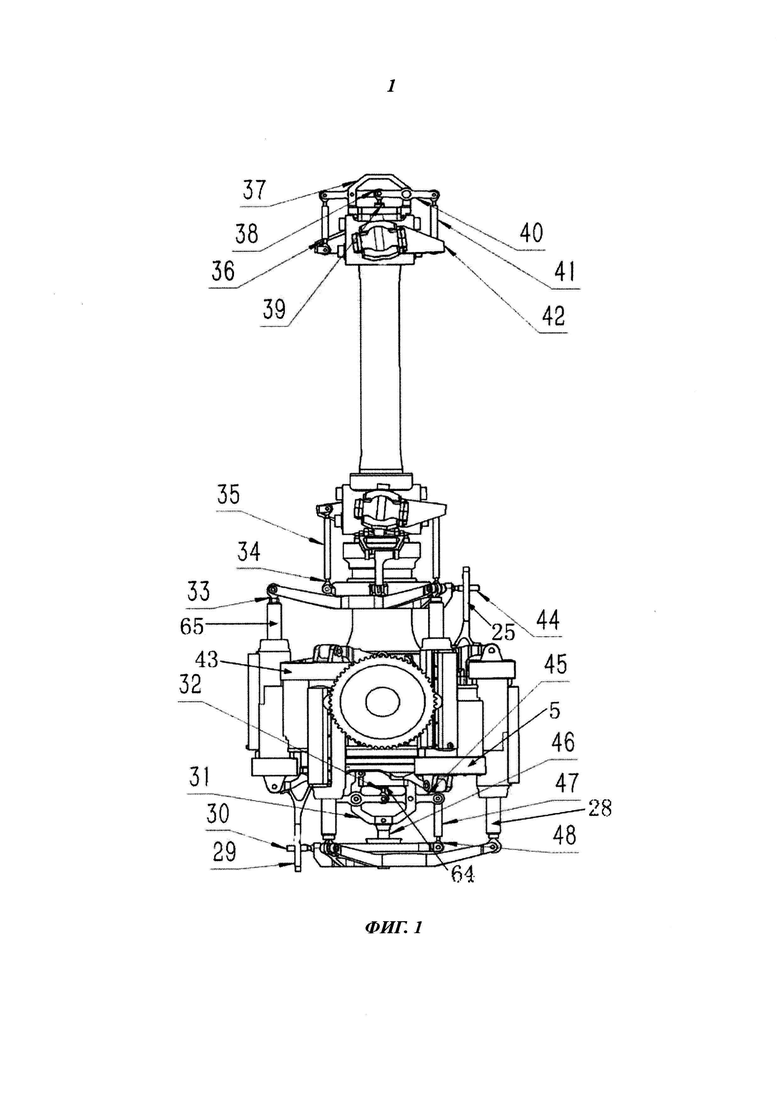
На фиг. 1 на виде спереди показана приводная система несущих винтов согласно одному из предпочтительных вариантов осуществления настоящего изобретения.
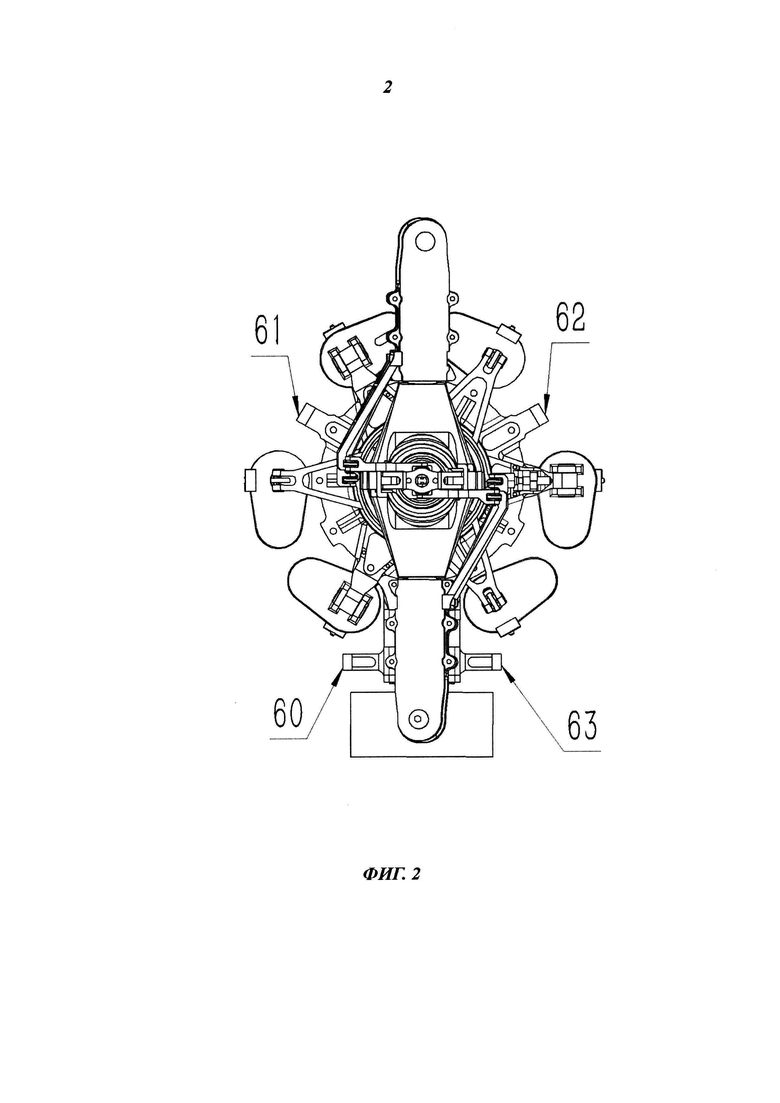
На фиг. 2 на виде сверху показана приводная система несущих винтов согласно одному из предпочтительных вариантов осуществления настоящего изобретения.
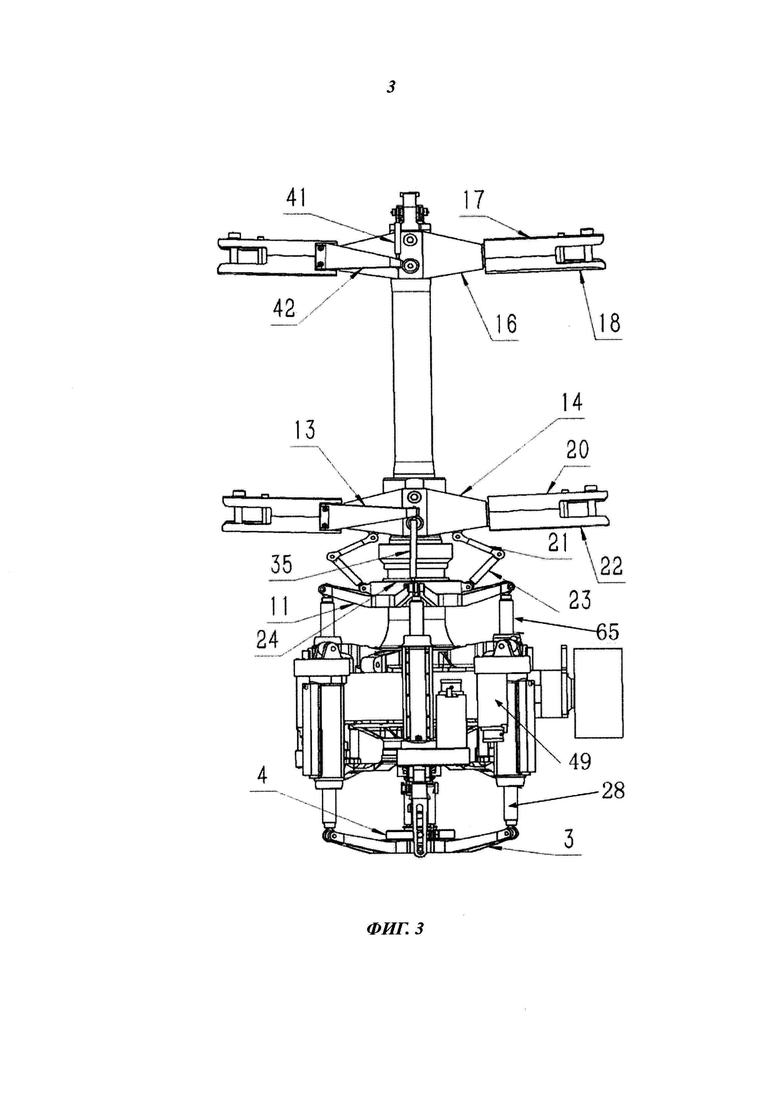
На фиг. 3 на виде слева показана приводная система несущих винтов согласно одному из предпочтительных вариантов осуществления настоящего изобретения.
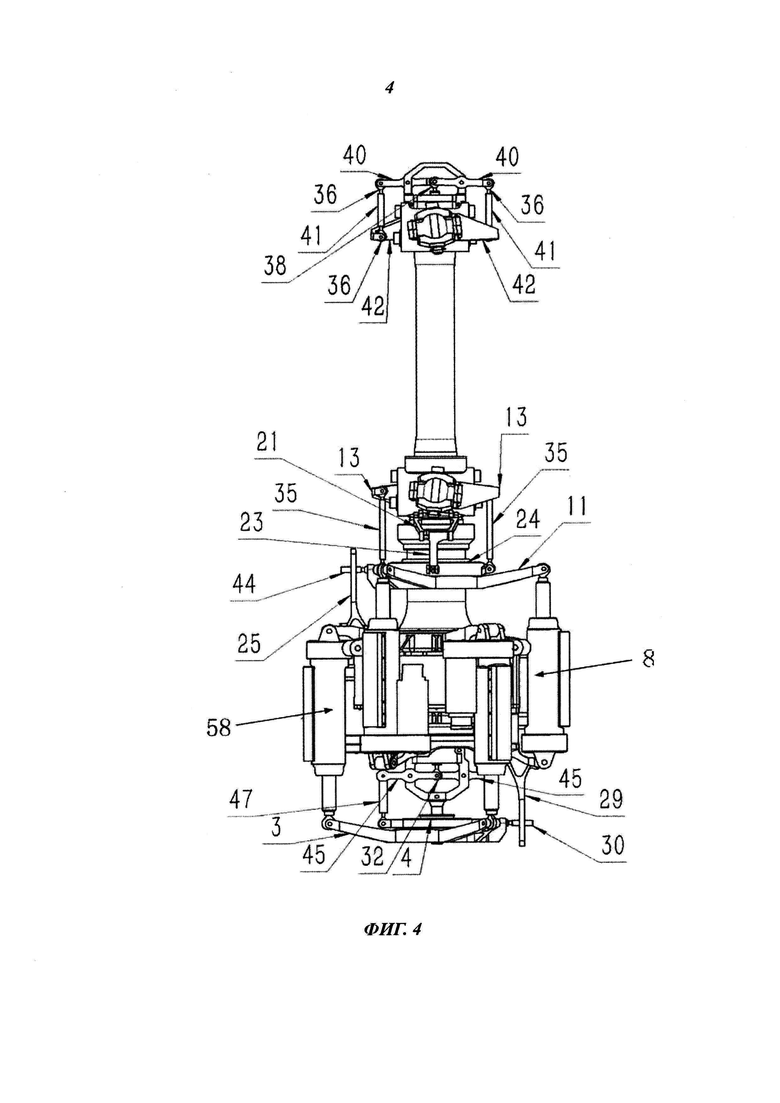
На фиг. 4 на виде сзади показана приводная система несущих винтов согласно одному из предпочтительных вариантов осуществления настоящего изобретения.
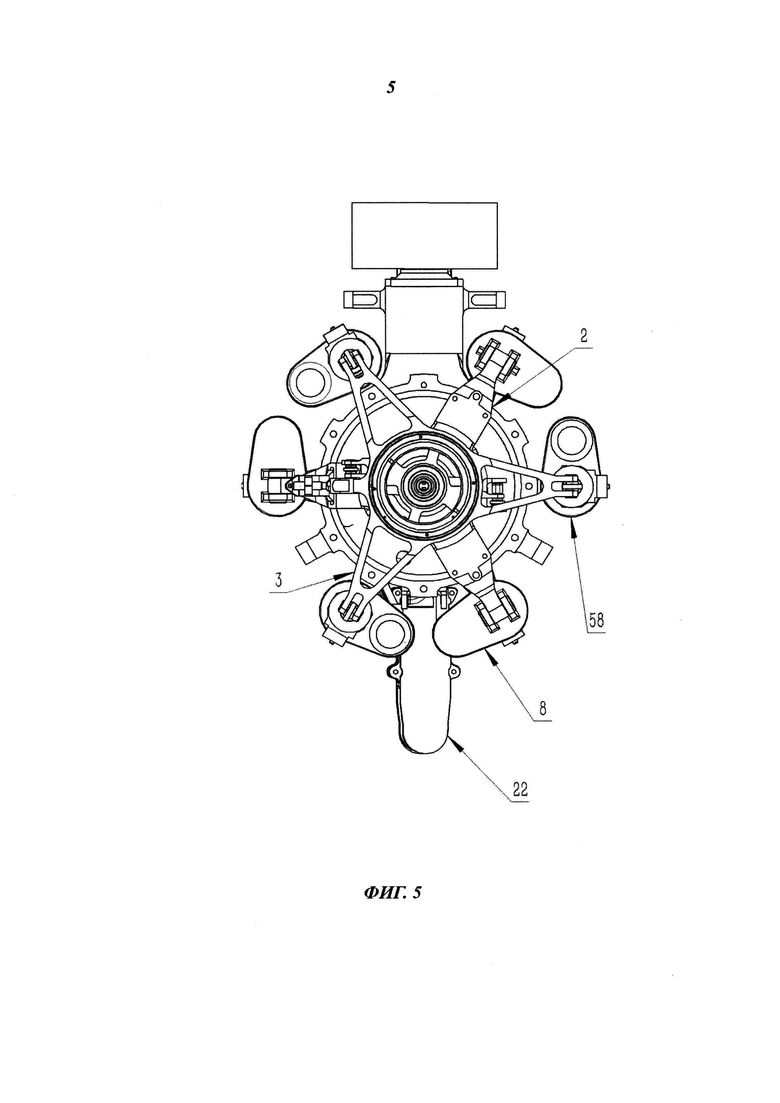
На фиг. 5 на виде снизу показана приводная система несущих винтов согласно одному из предпочтительных вариантов осуществления настоящего изобретения.
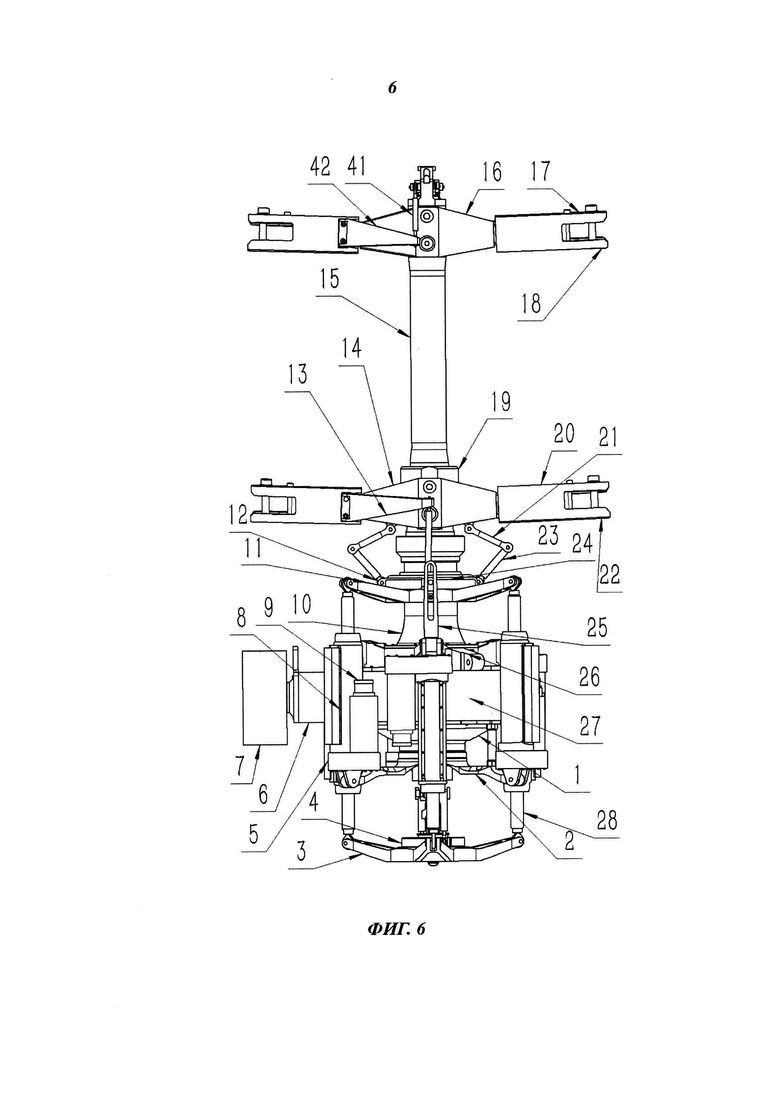
На фиг. 6 на виде справа показана приводная система несущих винтов согласно одному из предпочтительных вариантов осуществления настоящего изобретения.
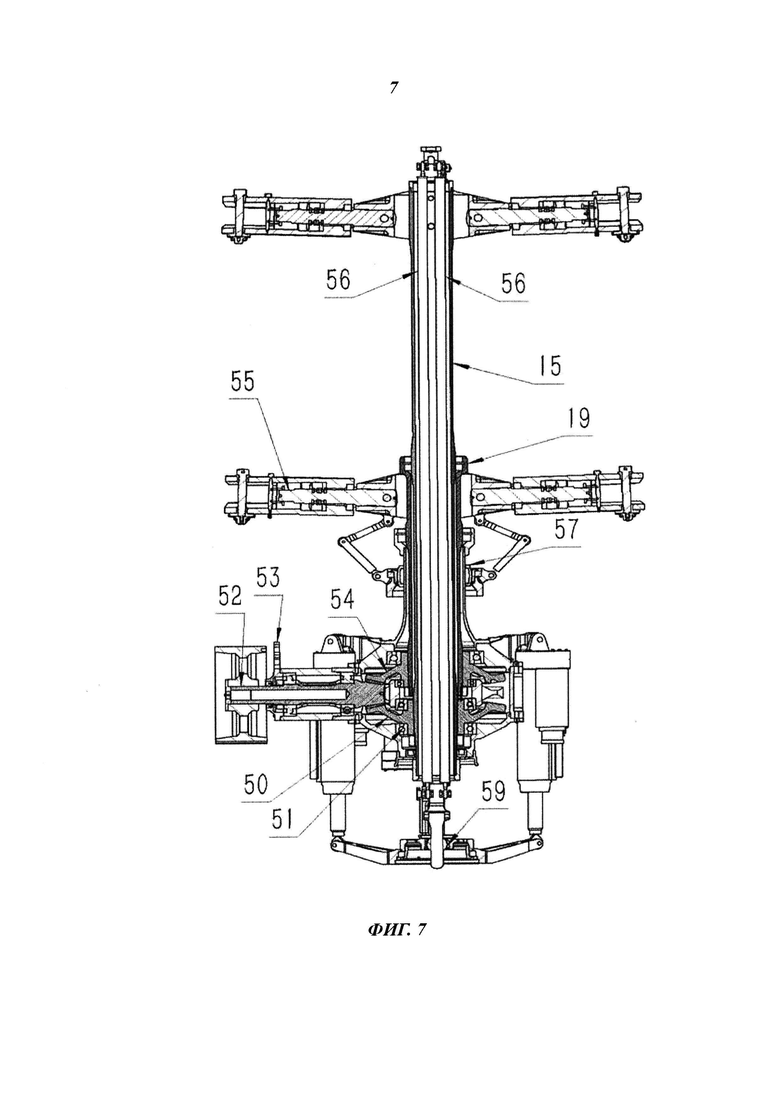
На фиг. 7 на виде спереди представлено полное сечение приводной системы несущих винтов согласно одному из предпочтительных вариантов осуществления настоящего изобретения.
Подробное раскрытие изобретения
Для того чтобы обеспечить наглядность и доступность пониманию объектов, технических решений и преимуществ настоящего изобретения, ниже приведено подробное описание настоящего изобретения со ссылкой на прилагаемые чертежи и предпочтительные варианты его осуществления. Очевидно, что раскрытые предпочтительные варианты являются лишь частью предпочтительных вариантов осуществления настоящего изобретения, а не всеми возможными предпочтительными вариантами. Все остальные предпочтительные варианты, полученные специалистами в данной области техники без творческих усилий на основании раскрытых предпочтительных вариантов, подпадают под объем защиты настоящего изобретения.
Для того чтобы упростить конструкцию приводной системы несущих винтов и, тем самым, решить проблемы, связанные с низкой эффективностью процесса и неудобством при проведении испытаний и технического обслуживания, в предпочтительных вариантах осуществления настоящего изобретения предложена приводная система несущих винтов.
Ниже со ссылкой на фиг. 1-7 будет раскрыта приводная система несущих винтов согласно одному из предпочтительных вариантов осуществления настоящего изобретения. При этом на фиг. 1 приводная система несущих винтов согласно одному из предпочтительных вариантов осуществления настоящего изобретения показана на виде спереди; на фиг. 2 приводная система несущих винтов согласно одному из предпочтительных вариантов осуществления настоящего изобретения показана на виде сверху; на фиг. 3 приводная система несущих винтов согласно одному из предпочтительных вариантов осуществления настоящего изобретения показана на виде слева; на фиг. 4 приводная система несущих винтов согласно одному из предпочтительных вариантов осуществления настоящего изобретения показана на виде сзади; на фиг. 5 приводная система несущих винтов согласно одному из предпочтительных вариантов осуществления настоящего изобретения показана на виде снизу; на фиг. 6 приводная система несущих винтов согласно одному из предпочтительных вариантов осуществления настоящего изобретения показана на виде справа; на фиг. 7 на виде спереди представлено полное сечение приводной системы несущих винтов согласно одному из предпочтительных вариантов осуществления настоящего изобретения, причем плоскость сечения представляет собой плоскость, проходящую через центральную линию внутреннего вала, перпендикулярно плоскости листа, при этом проекция является левой.
Следует отметить, что приводная система несущих винтов согласно рассматриваемому варианту осуществления настоящего изобретения применима в отношении двухвинтового автономного вертолета соосной схемы. При этом, как показано на фиг. 1-7, двухвинтовой автономный вертолет соосной схемы может содержать:
наружный вал 19;
втулку 14 нижнего несущего винта, закрепленную с наружной стороны одного конца наружного вала 19;
по меньшей мере два первых зажимных элемента лопасти, соединенных с втулкой 14 нижнего несущего винта, причем каждый из указанных первых зажимных элементов лопасти выполнен с возможностью кручения относительно втулки 14 нижнего несущего винта и содержит первый зажим 20 лопасти и второй зажим 22 лопасти, причем указанный первый зажим 20 лопасти и указанный второй зажим 22 лопасти совместно зажимают лопасть нижнего несущего винта;
внутренний вал 15;
втулку 16 верхнего несущего винта, закрепленную с наружной стороны одного конца внутреннего вала 15;
по меньшей мере два вторых зажимных элемента лопасти, соединенных с втулкой 16 верхнего несущего винта, причем каждый из указанных вторых зажимных элементов лопасти выполнен с возможностью кручения относительно втулки 16 верхнего несущего винта и содержит третий зажим 17 лопасти и четвертый зажим 18 лопасти, причем указанный третий зажим 17 лопасти и указанный четвертый зажим 18 лопасти совместно зажимают лопасть верхнего несущего винта;
коробку, вмещающую в себя зубчатую передачу и содержащую верхнюю крышку 26, корпус 27 коробки и нижнюю крышку 1, причем указанная зубчатая передача соединена с наружным валом 19 и внутренним валом 15;
синхронный шкив 7, соединенный с указанной зубчатой передачей, причем вращение синхронного шкива приводит указанную зубчатую передачу во вращение для приведения во вращение наружного вала 19 и внутреннего вала 15, причем наружный вал 19 выполнен с возможностью вращения в противоположном направлении относительно внутреннего вала 15, причем втулка 14 нижнего несущего винта установлена неподвижно относительно наружного вала 19, а втулка 16 верхнего несущего винта установлена неподвижно относительно внутреннего вала 15;
причем каждый из указанных первых зажимных элементов лопасти выполнен с возможностью кручения относительно втулки 14 нижнего несущего винта, а каждый из указанных вторых зажимных элементов лопасти выполнен с возможностью кручения относительно втулки 16 верхнего несущего винта под действием вала зажима лопасти, например, внутри второго зажимного элемента лопасти предусмотрен вал 55 зажима лопасти, обеспечивающий возможность кручения второго зажимного элемента лопасти относительно втулки 16 верхнего несущего винта.
Кроме того, в частности, удлиненный конец 6 корпуса 27 коробки соединен со синхронным шкивом 7 так, что указанный синхронный шкив 7 может плавно вращаться под действием электродвигателя в качестве силового устройства в двухвинтовом автономном вертолете соосной схемы, причем на него не оказывают влияние другие элементы. При этом зубчатая передача, расположенная внутри указанной коробки, может содержать вал 52 конической передачи, верхнее коническое зубчатое колесо 54 и нижнее коническое зубчатое колесо 50, причем указанный синхронный шкив 7 соединен с валом 52 конической передачи, который, в свою очередь, соответствующим образом соединен с верхним коническим зубчатым колесом 54 и нижним коническим зубчатым колесом 50, причем верхнее коническое зубчатое колесо 54 входит в зацепление с наружным валом 19, а нижнее коническое зубчатое колесо 50 соединено с внутренним валом 15. Кроме того, может быть предусмотрена торцевая крышка 53 вала зубчатой передачи, расположенная на удлиненном конце 6 корпуса 27 коробки и предназначенная для осевого размещения вала 52 зубчатой передачи.
Как показано на фиг. 1-7, приводная система несущих винтов, применимая в отношении двухвинтового автономного вертолета соосной схемы согласно рассматриваемому предпочтительному варианту осуществления настоящего изобретения, может содержать приводную систему верхнего несущего винта и приводную систему нижнего несущего винта,
причем приводная система нижнего несущего винта может содержать:
по меньшей мере два наклонных рычага 13 зажима лопасти нижнего несущего винта, один конец каждого из которых закреплен на заданной монтажной поверхности соответствующего первого зажимного элемента лопасти; причем каждый из указанных наклонных рычагов 13 зажима лопасти нижнего несущего винта однозначным образом соответствует одному первому зажимному элементу лопасти;
по меньшей мере две нижние тяговые штанги 35 наклонного рычага, один конец каждой из которых соединен с другим концом соответствующего наклонного рычага 13 зажима лопасти нижнего несущего винта; причем каждая из указанных нижних тяговых штанг наклонного рычага однозначным образом соответствует одному наклонному рычагу 13 зажима лопасти нижнего несущего винта;
несущую башню 10, которая надета на наружный вал 19 одним концом, закрепленным на наружной крышке 26; причем внутренняя стенка несущей башни 10 расположена на заданном расстоянии от наружной стенки наружного вала 19 так, что несущая башня 10 не оказывает влияние на вращение наружного вала 19;
вращающуюся тарелку 24 автомата перекоса нижнего несущего винта, которая надета на стационарную тарелку 11 автомата перекоса нижнего несущего винта и соединена с другим концом каждой из указанных нижних тяговых штанг 35 наклонного рычага; причем указанная вращающаяся тарелка 24 автомата перекоса нижнего несущего винта выполнена с возможностью вращения относительно несущей башни 10;
по меньшей мере два блока управления нижнего несущего винта, один конец каждого из которых соединен с втулкой 14 нижнего несущего винта, а другой конец - соединен с вращающейся тарелкой 24 автомата перекоса нижнего несущего винта для приведения во вращение указанной вращающейся тарелки 24 автомата перекоса нижнего несущего винта при вращении втулки 14 нижнего несущего винта с наружным валом 19;
стационарную тарелку 11 автомата перекоса нижнего несущего винта, которая надета на указанную несущую башню 10 посредством подшипника 57 скольжения нижнего несущего винта и соединена с вращающейся тарелкой 24 автомата перекоса нижнего несущего винта посредством подшипника 57 скольжения нижнего несущего винта, причем вращающаяся тарелка 24 автомата перекоса нижнего несущего винта и стационарная тарелка 11 автомата перекоса нижнего несущего винта выполнены с возможностью вращения независимо друг от друга; причем стационарная тарелка 11 автомата перекоса нижнего несущего винта выполнена с возможностью вращения относительно несущей башни 10;
монтажное основание 2 исполнительного механизма, жестко соединенное с нижней крышкой 1;
по меньшей мере три первых исполнительных механизма 8, установленных на указанном монтажном основании 2 исполнительного механизма, причем каждый из указанных первых исполнительных механизмов 8 может содержать корпус, и первые трубчатые штанги 65 резьбового стержня, одним своим концом расположенные в указанном корпусе, причем указанные первые трубчатые штанги 65 резьбового стержня выполнены с возможностью выдвижения вверх и вниз, при этом конец каждой из первых трубчатых штанг 65 резьбового стержня, выступающий из указанного корпуса, соединен с стационарной тарелкой 11 автомата перекоса нижнего несущего винта с тем, чтобы обеспечить наклон указанной стационарной тарелки 11 автомата перекоса нижнего несущего винта в конкретном направлении при выдвижении вверх и вниз первой трубчатой штанги 65 резьбового стержня и, тем самым, обеспечить наклон вращающейся тарелки 24 автомата перекоса нижнего несущего винта в конкретном направлении; причем указанная стационарная тарелка 11 автомата перекоса нижнего несущего винта выполнена с возможностью наклона в конкретном направлении, когда расстояния выдвижения указанных по меньшей мере трех первых трубчатых штанг 65 резьбового стержня отличаются друг от друга;
по меньшей мере три электродвигателя 9, каждый из которых соединен с соответствующим первым исполнительным механизмом 8 и управляет первой трубчатой штангой 65 резьбового стержня соответствующего первого исполнительного механизма 8 для ее выдвижения вверх и вниз;
первый запорный стержень 25, один конец которого закреплен в месте, отличном от места крепления несущей башни 10, на верхней крышке 26, а в другом конце которого предусмотрено сквозное отверстие;
первый ползун 44, расположенный на стационарной тарелке 11 автомата перекоса нижнего несущего винта и входящий в указанное сквозное отверстие первого запорного стержня 25 для обеспечения возможности наклона стационарной тарелки 11 автомата перекоса нижнего несущего винта в конкретном направлении и блокировки ее вращения совместно с вращающейся тарелкой 24 автомата перекоса нижнего несущего винта;
причем приводная система верхнего несущего винта может содержать:
по меньшей мере два наклонных рычага 42 зажима лопасти верхнего несущего винта, один конец каждого из которых закреплен на заданной монтажной поверхности соответствующего второго зажимного элемента лопасти;
причем каждый из указанных наклонных рычагов 42 зажима лопасти верхнего несущего винта однозначным образом соответствует одному второму зажимному элементу лопасти;
по меньшей мере две верхние тяговые штанги 41 наклонного рычага, один конец каждой из которых соединен с другим концом соответствующего наклонного рычага 42 зажима лопасти верхнего несущего винта; причем каждая из указанных верхних тяговых штанг 41 наклонного рычага однозначным образом соответствует одному соответствующему наклонному рычагу 42 зажима лопасти верхнего несущего винта;
по меньшей мере две верхние рулевые тяги 40 верхнего несущего винта, один конец каждой из которых соединен с соответствующей верхней тяговой штангой 41 наклонного рычага; причем каждая из указанных верхних рулевых тяг 40 верхнего несущего винта однозначным образом соответствует одной верхней тяговой штанге 41 наклонного рычага;
верхнюю пробку 39 тяговой штанги, соединенную с другим концом верхней рулевой тяги 40 верхнего несущего винта;
по меньшей мере две тяговые штанги 56, расположенные внутри внутреннего вала 15, один конец каждой из которых соединен с соответствующей верхней рулевой тягой 40 верхнего несущего винта посредством указанной верхней пробки 39 тяговой штанги; причем каждая из указанных тяговых штанг однозначным образом соответствует одной верхней рулевой тяге 40 верхнего несущего винта;
нижнюю пробку 64 тяговой штанги;
по меньшей мере две нижние рулевые тяги 45 верхнего несущего винта, один конец каждой из которых соединен с указанной нижней пробкой 64 тяговой штанги и соединен с другим концом соответствующей тяговой штанги 56 посредством нижней пробки 56 тяговой штанги; причем каждая из указанных нижних рулевых тяг 45 верхнего несущего винта однозначным образом соответствует одной тяговой штанге 56;
по меньшей мере два L-образных рычага 47 рулевой тяги верхнего несущего винта, один конец каждого из которых соединен с другим концом соответствующей нижней рулевой тяги 45 верхнего несущего винта; причем каждый из указанных L-образных рычагов 47 рулевой тяги верхнего несущего винта однозначным образом соответствует одной нижней рулевой тяге 45 верхнего несущего винта;
подвижную штангу 46 тарелки автомата перекоса верхнего несущего винта;
вращающуюся тарелку 4 автомата перекоса верхнего несущего винта, которая надета на указанную подвижную штангу 46 вращающейся тарелки автомата перекоса верхнего несущего винта посредством подшипника 59 скольжения верхнего несущего винта и соединена с другим концом L-образного рычага 47 рулевой тяги верхнего несущего винта так, что обеспечена возможность приведения указанной вращающейся тарелки 4 автомата перекоса верхнего несущего винта во вращение под действием L-образных рычагов 47 рулевой тяги верхнего несущего винта и нижней рулевой тяги 45 верхнего несущего винта при вращении втулки 16 верхнего несущего винта совместно с внутренним валом; причем вращающаяся тарелка 4 автомата перекоса верхнего несущего винта выполнена с возможностью вращения относительно подвижной штанги 46 тарелки автомата перекоса верхнего несущего винта;
стационарную тарелку 3 автомата перекоса верхнего несущего винта, которая надета на указанную вращающуюся тарелку 4 автомата перекоса верхнего несущего винта, причем указанная вращающаяся тарелка 4 автомата перекоса верхнего несущего винта и стационарная тарелка 3 автомата перекоса верхнего несущего винта выполнены с возможностью вращения независимо друг от друга; причем стационарная тарелка 3 автомата перекоса верхнего несущего винта выполнена с возможностью вращения относительно подвижной штанги 46 тарелки автомата перекоса верхнего несущего винта;
по меньшей мере три вторых исполнительных механизма 58, установленных на указанной верхней крышке 26, причем каждый из вторых исполнительных механизмов 58 может содержать корпус, и вторую трубчатую штангу 28 резьбового стержня, одним своим концом расположенную в указанном корпусе, причем указанная вторая трубчатая штанга 28 резьбового стержня выполнена с возможностью выдвижения вверх и вниз, при этом конец каждой второй трубчатой штанги 28 резьбового стержня, выступающий из указанного корпуса, соединен с стационарной тарелкой 3 автомата перекоса верхнего несущего винта с тем, чтобы обеспечить наклон указанной стационарной тарелки 3 автомата перекоса верхнего несущего винта в конкретном направлении при выдвижении вверх и вниз указанной второй трубчатой штанги 28 резьбового стержня и, тем самым, обеспечить наклон вращающейся тарелки 4 автомата перекоса верхнего несущего винта в конкретном направлении; причем стационарная тарелка 3 автомата перекоса верхнего несущего винта выполнена с возможностью наклона в конкретном направлении, когда длины указанных по меньшей мере трех вторых трубчатых штанг 28 резьбового стержня отличаются друг от друга;
по меньшей мере три вторых электродвигателя 49, каждый из которых соединен со второй трубчатой штангой 28 резьбового стержня соответствующего второго исполнительного механизма 58 и управляет второй трубчатой штангой 28 резьбового стержня соответствующего второго исполнительного механизма 58 для ее выдвижения вверх и вниз;
второй запорный стержень 29, один конец которого закреплен на указанном монтажном основании 2 исполнительного механизма, а в другом конце которого предусмотрено сквозное отверстие;
второй ползун 30, расположенный на стационарной тарелке 3 автомата перекоса верхнего несущего винта и входящий в указанное сквозное отверстие второго запорного стержня 29 для обеспечения возможности наклона стационарной тарелки 3 автомата перекоса верхнего несущего винта в конкретном направлении и блокировки ее вращения совместно с вращающейся тарелкой 4 автомата перекоса верхнего несущего винта.
Следует отметить, что блок управления нижнего несущего винта может быть образован двумя элементами, например, блок управления нижнего несущего винта может быть образован запорной тарелкой 21 и L-образным рычагом 23 рулевой тяги нижнего несущего винта, как показано на фиг. 3 и фиг. 6, причем один конец указанной запорной тарелки 21 соединен с одним концом L-образного рычага 23 рулевой тяги нижнего несущего винта, а другой конец указанной запорной тарелки 21 соединен с втулкой 14 нижнего несущего винта, а другой конец L-образного рычага 23 рулевой тяги нижнего несущего винта соединен с вращающейся тарелкой 24 автомата перекоса нижнего несущего винта. Очевидно, что специалисту в данной области техники должно быть понятно, что блок управления нижнего несущего винта может быть образован одним элементом, причем один конец указанного элемента соединен с втулкой 14 нижнего несущего винта, а другой его конец соединен с вращающейся тарелкой 24 автомата перекоса нижнего несущего винта; в качестве альтернативы, также возможен вариант, когда блок управления нижнего несущего винта образован по меньшей мере тремя элементами, посредством которых втулка 14 нижнего несущего винта и вращающаяся тарелка 24 автомата перекоса нижнего несущего винта соединены друг с другом.
В рассматриваемом варианте, необходимо, чтобы длина сквозного отверстия, выполненного в первом запорном стержне 25, обеспечивала возможность плавного наклона стационарной тарелки 11 автомата перекоса нижнего несущего винта в конкретном направлении; при этом необходимо, чтобы длина сквозного отверстия, выполненного во втором запорном стержне 29, обеспечивала возможность плавного наклона стационарной тарелки 3 автомата перекоса верхнего несущего винта в конкретном направлении.
В рассматриваемом варианте, длины первого ползуна 44 и второго ползуна 30 можно задавать в зависимости от текущей ситуации. Например, первый ползун 44 может входить в сквозное отверстие первого запорного стержня 25, но не выходить наружу из указанного сквозного отверстия; в качестве альтернативы, указанный первый ползун 44 может входить в сквозное отверстие первого запорного стержня 25 и выходить наружу из указанного сквозного отверстия; при этом второй ползун 30 может входить в сквозное отверстие второго запорного стержня 29, но не выходить наружу из указанного сквозного отверстия; в качестве альтернативы, указанный второй ползун 30 может входить в сквозное отверстие второго запорного стержня 29 и выходить наружу из указанного сквозного отверстия.
Кроме того, в соединениях между элементами, раскрытыми в предпочтительных вариантах осуществления настоящего изобретения, могут быть использованы подшипниковые соединения или резьбовые соединения в зависимости от текущих требований к эксплуатации. Например, соединение между стационарной тарелкой 11 автомата перекоса нижнего несущего винта и вращающейся тарелкой 24 автомата перекоса нижнего несущего винта, а также соединение между стационарной тарелкой 3 автомата перекоса верхнего несущего винта и вращающейся тарелкой 4 автомата перекоса верхнего несущего винта могут оба представлять собой подшипниковое соединение, причем блок управления нижнего несущего винта может быть соединен с гнездом 12 подшипника конца L-образного стержня, соединенного с вращающейся тарелкой 24 автомата перекоса нижнего несущего винта, обеспечивая, тем самым, соединение с вращающейся тарелкой 24 автомата перекоса нижнего несущего винта; причем нижняя рулевая тяга 45 верхнего несущего винта может быть соединена с нижней пробкой 64 тяговой штанги посредством подшипника 32 скольжения нижней тяговой штанги; причем верхние тяговые штанги 41 наклонного рычага могут быть соединены с гнездом 36 подшипника конца верхнего стержня наклонного рычага, соединенного с наклонным рычагом 42 зажима лопасти верхнего несущего винта, обеспечивая, тем самым, соединение с наклонным рычагом 42 зажима лопасти верхнего несущего винта; причем верхняя пробка 39 тяговой штанги может быть соединена с гнездом 39 подшипника скольжения верхней тяговой штанги, соединенного с верхней рулевой тягой 40 верхнего несущего винта, обеспечивая, тем самым, соединение с верхней рулевой тягой 40 верхнего несущего винта; причем первая наружная трубчатая штанга 65 резьбового стержня может быть соединена с стационарной тарелкой 11 автомата перекоса нижнего несущего винта посредством гнезда 33 подшипника конца стержня; нижняя тяговая штанга 35 наклонного рычага может быть соединена с вращающейся тарелкой 24 автомата перекоса нижнего несущего винта посредством гнезда 34 подшипника нижнего конца стержня наклонного рычага; по аналогии, нижний подшипник 48 скольжения, подшипник 57 скольжения нижнего несущего винта, подшипник 59 скольжения верхнего несущего винта и подшипник 51 могут также служить в качестве соединительных частей между соответствующими элементами.
Следует отметить, что приводная система несущих винтов согласно предпочтительным вариантам осуществления настоящего изобретения может быть соединена с рамой двухвинтового автономного вертолета соосной схемы посредством соединительной точки 60, второй соединительной точки 61, третьей соединительной точки 62 и четвертой соединительной точки 63. Очевидно, что настоящее изобретение не ограничивается вышеперечисленным.
В предлагаемом техническом решении, по меньшей мере три первых исполнительных механизма 8 выполнены с возможностью обеспечения наклона стационарной тарелки 11 автомата перекоса нижнего несущего винта в конкретном направлении путем взаимодействия друг с другом (при удлинении, укорочении или неподвижном состоянии первой трубчатой штанги 65 резьбового стержня) так, что вращающаяся тарелка 24 автомата перекоса нижнего несущего винта, нижние тяговые штанги 35 наклонного рычага и наклонные рычаги 13 зажима лопасти нижнего несущего винта все находятся в движении, тем самым, обеспечивая кручение первых зажимных элементов лопасти относительно втулки 14 нижнего несущего винта; по меньшей мере три вторых исполнительных механизма 58 выполнены с возможностью обеспечения наклона стационарной тарелки 3 автомата перекоса верхнего несущего винта в конкретном направлении путем взаимодействия друг с другом (при удлинении, укорочении или неподвижном состоянии второй трубчатой штанги 28 резьбового стержня) так, что вращающаяся тарелка 4 автомата перекоса верхнего несущего винта, L-образные рычаги 47 рулевой тяги верхнего несущего винта, нижние рулевые тяги 45 верхнего несущего винта, тяговые штанги 56, верхние рулевые тяги 40 верхнего несущего винта, верхние тяговые штанги 41 наклонного рычага и наклонные рычаги 42 зажима лопасти верхнего несущего винта все находятся в движении, обеспечивая, тем самым, кручение вторых зажимных элементов лопасти относительно втулки 16 верхнего несущего винта. Таким образом, в предлагаемом решении, приводная система несущих винтов имеет упрощенную конструкцию, что позволяет решить проблемы, связанные с низкой эффективностью процесса и неудобством при проведении испытаний и технического обслуживания.
Кроме того, для обеспечения стабильной конструкции, приводная система верхнего несущего винта может содержать:
верхнюю раму 37 внутреннего вала, соединенную с каждой из верхних рулевых тяг 40 верхнего несущего винта для обеспечения опоры каждой из верхних рулевых тяг 40 верхнего несущего винта без влияния на их вращение, причем один конец указанной верхней рамы 37 внутреннего вала прикреплен к концу внутреннего вала 15, на котором установлена втулка 15 верхнего несущего винта; нижнюю раму 31 внутреннего вала, соединенную с каждой из нижних рулевых тяг 45 верхнего несущего винта для обеспечения опоры каждой из нижних рулевых тяг 45 верхнего несущего винта без влияния на их вращение, причем один конец указанной нижней рамы 31 внутреннего вала прикреплен к внутреннему валу 15, а другой ее конец соединен с концом подвижной штанги 46 наклонной тарелки нижнего несущего винта, на которой установлена вращающаяся тарелка 4 автомата перекоса верхнего несущего винта.
Видно, что вибрацию, вызываемую вращением верхних рулевых тяг 40 верхнего несущего винта и верхних тяговых штанг 41 наклонного рычага совместно с внутренним валом 15, можно предотвратить за счет добавления верхней рамы 37 внутреннего вала, тем самым, улучшая стабильность конструкции, причем вибрацию, вызываемую вращением нижних рулевых тяг 45 верхнего несущего винта совместно с внутренним валом 15, можно предотвратить за счет добавления нижней рамы 31 внутреннего вала, тем самым, улучшая стабильность конструкции.
Более того, приводная система нижнего несущего винта предпочтительно может дополнительно содержать:
по меньшей мере три первых редуктора 5, каждый из которых соединен с соответствующим первым электродвигателем 9, причем выходная частота вращения соответствующего первого электродвигателя 9 регулируется каждым из первых редукторов 5.
Соответствующим образом, приводная система верхнего несущего винта может дополнительно содержать:
по меньшей мере три вторых редуктора 43, каждый из которых соединен с соответствующим вторым электродвигателем 49, причем выходная частота вращения соответствующего второго электродвигателя 49 регулируется каждым из вторых редукторов 5. Специалисту в данной области техники должно быть понятно, что первый редуктор 5 и второй редуктор 43 могут представлять собой, помимо прочего, редуктор зубчатого типа или редуктор цепного типа.
Видно, что селективную способность первого электродвигателя 9 улучшают за счет того, что для первого электродвигателя 9 предусматривают первый редуктор 5, а селективную способность второго электродвигателя 49 улучшают за счет того, что для второго электродвигателя 49 предусматривают второй редуктор 43.
Кроме того, ширина одного конца наклонного рычага 13 зажима лопасти нижнего несущего винта, закрепленного на первом зажимном элементе лопасти, может превышать ширину другого конца наклонного рычага 13 зажима лопасти нижнего несущего винта, причем ширина одного конца наклонного рычага 42 зажима лопасти верхнего несущего винта, закрепленного на втором зажимном элементе лопасти, может превышать ширину другого конца наклонного рычага 42 зажима лопасти верхнего несущего винта, причем разница в ширине такова, что наклонные рычаги 13 зажима лопасти нижнего несущего винта и наклонные рычаги 42 зажима лопасти верхнего несущего винта имеют одинаковую прочность для уменьшения массы наклонных рычагов 13 зажима лопасти нижнего несущего винта и наклонных рычагов 42 зажима лопасти верхнего несущего винта.
Кроме того, способ приведения в действие несущего винта, соответствующий описанной выше приводной системе несущих винтов, может содержать следующие этапы.
Этап а, на котором получают команду на управление полетом;
причем команду на управление полетом может отправить оператор через операционный интерфейс, когда необходимо привести в действие систему несущих винтов, причем устройство управления полетом, предусмотренное на раме автономного вертолета соосной схемы, получит команду на управление полетом и выполнит последующие процессы в соответствии с полученной командой на управление полетом.
Специалисту в данной области техники должно быть понятно, что команда на управление полетом может представлять собой команду на взлет, команду на зависание, команду на движение вперед, команду на движение в обратном направлении, команду на левый поворот или команду на правый поворот. Также возможно, что команда на управление полетом может быть отправлена устройством удаленного управления, в качестве альтернативы команда на управление полетом может быть отправлена станцией наземного управления.
Этап b, на котором получают текущие состояния вращения первых электродвигателей 9, соответствующих по меньшей мере трем первым исполнительным механизмам 8 в приводной системе нижнего несущего винта, а также текущие состояния вращения вторых электродвигателей 49, соответствующих по меньшей мере трем вторым исполнительным механизмам 58 в приводной системе верхнего несущего винта.
После приема команды на управление полетом, указанное устройство управления полетом способно получить текущие состояния вращения первых электродвигателей 9, соответствующих по меньшей мере трем первым исполнительным механизмам 8 в приводной системе нижнего несущего винта, а также текущие состояния вращения вторых электродвигателей 49, соответствующих по меньшей мере трем вторым исполнительным механизмам 58 в приводной системе верхнего несущего винта, в результате чего возможно выполнение последующих процессов. Кроме того, каждый из первых исполнительных механизмов 8 однозначным образом соответствует одному первому электродвигателю 9, а каждый из вторых исполнительных механизмов 58 однозначным образом соответствует одному второму электродвигателю 49, причем каждый первый электродвигатель 9 однозначным образом соответствует одному текущему состоянию вращения, а каждый из вторых электродвигателей 49 однозначным образом соответствует одному текущему состоянию вращения.
Специалисту в данной области техники должно быть понятно, что состояние вращения электродвигателя может представлять собой угол, на который вращается электродвигатель.
Этап с, на котором в зависимости от команды на управление полетом и текущих состояний вращения первых электродвигателей 9 определяют требуемые первые состояния вращения первых электродвигателей 9;
причем требуемые первые состояния вращения первых электродвигателей 9 можно определить после получения команды на управление полетом и текущих состояний вращения первых электродвигателей 9, причем в дальнейшем первыми электродвигателями 9 управляют в соответствии с первыми состояниями вращения; при этом каждый первый электродвигатель 9 однозначным образом соответствует одному первому состоянию вращения. Требуемые первые состояния вращения различных первых электродвигателей 9 могут быть одинаковыми или отличаться друг от друга.
Этап d, на котором в зависимости от команды на управление полетом и текущих состояний вращения вторых электродвигателей 49 определяют требуемые вторые состояния вращения вторых электродвигателей 49,
причем требуемые вторые состояния вращения вторых электродвигателей 49 можно определить после получения команды на управление полетом и текущих состояний вращения вторых электродвигателей 49, причем в дальнейшем вторыми электродвигателями 49 управляют в соответствии со вторыми состояниями вращения; при этом каждый второй электродвигатель 49 однозначным образом соответствует одному второму состоянию вращения. Требуемые вторые состояния вращения различных вторых электродвигателей 49 могут быть одинаковыми или отличаться друг от друга.
Этап е, на котором управляют первым электродвигателем 9 для обеспечения его вращения в соответствующем первом состоянии вращения так, чтобы первая наружная трубчатая штанга 65 резьбового стержня каждого из первых исполнительных механизмов 8 удлинялась, укорачивалась или оставалась неподвижной при вращении соответствующего первого электродвигателя 9;
причем первая наружная трубчатая штанга 65 резьбового стержня каждого из первых исполнительных механизмов 8 удлиняется, укорачивается или остается неподвижной при вращении соответствующего электродвигателя 9, что может обеспечить наклон стационарной тарелки 11 автомата перекоса нижнего несущего винта в приводной системе нижнего несущего винта в конкретном направлении и, тем самым, привести в движение вращающуюся тарелку 24 автомата перекоса нижнего несущего винта, указанные по меньшей мере две нижние тяговые штанги 35 наклонного рычага и по меньшей мере два наклонных рычага 13 зажима лопасти нижнего несущего винта, что обеспечивает возможность кручения первого зажимного элемента лопасти относительно втулки 14 нижнего несущего винта.
Следует отметить, что первая наружная трубчатая штанга 65 резьбового стержня первого электродвигателя 8 останется неподвижной (то есть, не произойдет ни ее удлинение, ни ее укорочение) при вращении соответствующего первого электродвигателя 9, когда первое состояние вращения первого электродвигателя 9 и его текущее состояние вращения являются одинаковыми; при этом первая наружная трубчатая штанга 65 резьбового стержня первого электродвигателя 8 будет удлиняться или укорачиваться при вращении соответствующего первого электродвигателя 9, когда первое состояние вращения первого электродвигателя 9 и его текущее состояние вращения отличаются друг от друга.
Этап f, на котором управляют вторым электродвигателем 49 для обеспечения его вращения в соответствующем втором состоянии вращения так, чтобы вторая наружная трубчатая штанга 28 резьбового стержня каждого из вторых исполнительных механизмов 58 удлинялась, укорачивалась или оставалась неподвижной при вращении соответствующего второго электродвигателя 49.
При этом вторая наружная трубчатая штанга 28 резьбового стержня каждого из вторых исполнительных механизмов 58 удлиняется, укорачивается или остается неподвижной при вращении соответствующего второго электродвигателя 49, что может обеспечить наклон стационарной тарелки 3 автомата перекоса верхнего несущего винта в приводной системе верхнего несущего винта в конкретном направлении и, тем самым, привести в движение вращающуюся тарелку 4 автомата перекоса верхнего несущего винта, указанные по меньшей мере два L-образных рычага 47 рулевых тяг верхнего несущего винта, по меньшей мере две нижние рулевые тяги 45 верхнего несущего винта, по меньшей мере две тяговые штанги 56 внутри внутреннего вала 15, по меньшей мере две верхние рулевые тяги 40 верхнего несущего винта, по меньшей мере две верхние тяговые штанги 41 наклонного рычага и по меньшей мере два наклонных рычага 42 зажима лопасти верхнего несущего винта, что обеспечивает возможность кручения второго зажимного элемента лопасти относительно втулки 16 верхнего несущего винта.
Следует отметить, что вторая наружная трубчатая штанга 28 резьбового стержня второго электродвигателя 58 останется неподвижной (то есть, не произойдет ни ее удлинение, ни ее укорочение) при вращении соответствующего второго исполнительного механизма 58, когда второе состояние вращения второго электродвигателя 58 и его текущее состояние вращения являются одинаковыми; при этом вторая наружная трубчатая штанга 28 резьбового стержня второго электродвигателя 58 будет удлиняться или укорачиваться при вращении соответствующего второго исполнительного механизма, когда второе состояние вращения второго электродвигателя 58 и его текущее состояние вращения отличаются друг от друга.
При этом вращение втулки 14 нижнего несущего винта с наружным валом 19 приводит во вращение вращающуюся тарелку 24 автомата перекоса нижнего несущего винта под действием по меньшей мере двух блоков управления нижнего несущего винта в приводной системе нижнего несущего винта; причем вращение втулки 16 верхнего несущего винта с внутренним валом 16 приводит во вращение вращающуюся тарелку 4 автомата перекоса верхнего несущего винта под действием L-образных рычагов 47 рулевых тяг верхнего несущего винта и нижних рулевых тяг 45 верхнего несущего винта.
Стационарная тарелка 11 автомата перекоса нижнего несущего винта не вращается вместе с вращающейся тарелкой 24 автомата перекоса нижнего несущего винта под действием первого запорного стержня 25 и первого ползуна 44 в приводной системе нижнего несущего винта; при этом стационарная тарелка 3 автомата перекоса верхнего несущего винта не вращается вместе с вращающейся тарелкой 4 автомата перекоса верхнего несущего винта под действием второго запорного стержня 95 и второго ползуна 30 в приводной системе верхнего несущего винта.
В частности, этап, на котором в зависимости от команды на управление полетом и текущих состояний вращения первых электродвигателей 9 определяют требуемые состояния вращения первых электродвигателей 9, может предусматривать следующее.
(1) В зависимости от текущих состояний вращения первых электродвигателей определяют текущий угол кручения, на который поворачивается каждый из первых зажимных элементов лопасти относительно втулки 14 нижнего несущего винта;
причем каждый из первых зажимных элементов лопасти однозначным образом соответствует одному текущему углу кручения.
Специалисту в данной области техники должно быть очевидно, что можно определять текущий угол кручения, на который поворачивается каждый из первых зажимных элементов лопасти относительно втулки 14 нижнего несущего винта, в зависимости от предварительно полученного соответствующего соотношения между углом кручения, на который поворачивается каждый из первых зажимных элементов лопасти относительно втулки 14 нижнего несущего винта, и состояниями вращения первых электродвигателей 9 после определения текущих состояний вращения первых электродвигателей 9. При этом указанное соответствующее соотношение между углом кручения, на который поворачивается каждый из первых зажимных элементов лопасти относительно втулки 14 нижнего несущего винта, и состояниями вращения первых электродвигателей 9 можно определить посредством вычислений.
При этом углы кручения, на которые поворачивается различные первые зажимные элементы лопасти относительно втулки 14 нижнего несущего винта, могут быть одинаковыми или отличаться друг от друга.
(2) Требуемый первый угол кручения, на который поворачивается каждый из первых зажимных элементов лопасти относительно втулки 14 нижнего несущего винта, определяют в зависимости от команды на управление полетом и текущего угла кручения, на который поворачивается каждый из первых зажимных элементов лопасти относительно втулки 14 нижнего несущего винта;
причем каждый из первых зажимных элементов лопасти однозначным образом соответствует первому текущему углу кручения.
Получить требуемый первый угол кручения, на который поворачивается каждый из первых зажимных элементов лопасти относительно втулки 14 нижнего несущего винта, можно путем объединения полученной команды на управление полетом и полученного угла кручения, на который поворачивается каждый из первых зажимных элементов лопасти относительно втулки 14 нижнего несущего винта, после чего можно выполнить последующие процессы.
При этом, первые углы кручения, на которые поворачивается различные первые зажимные элементы лопасти относительно втулки 14 нижнего несущего винта, могут быть одинаковыми или отличаться друг от друга.
(3) Требуемое первое состояние вращения каждого из первых электродвигателей 9 определяют в зависимости от требуемого первого угла кручения, на который поворачивается каждый из первых зажимных элементов лопасти относительно втулки 14 нижнего несущего винта.
Требуемое первое состояние вращения каждого из первых электродвигателей 9 можно определить в соответствии с предварительно полученным соответствующим соотношением между углом кручения, на который поворачивается каждый из первых зажимных элементов лопасти относительно втулки 14 нижнего несущего винта, и состояниями вращения первых электродвигателей 9 после определения требуемого угла кручения, на который поворачивается каждый из первых зажимных элементов лопасти относительно втулки 14 нижнего несущего винта. При этом, требуемые состояния вращения различных первых электродвигателей 9 могут быть одинаковыми или отличаться друг от друга.
Соответственно, этап, на котором в зависимости от команды на управление полетом и текущих состояний вращения вторых электродвигателей определяют требуемые вторые состояния вращения вторых электродвигателей 49, может предусматривать следующее.
(1) В зависимости от текущих состояний вращения вторых электродвигателей 49 определяют текущий угол кручения, на который поворачивается каждый из вторых зажимных элементов лопасти относительно втулки 16 верхнего несущего винта;
причем каждый из вторых зажимных элементов лопасти однозначным образом соответствует одному текущему углу кручения.
Специалисту в данной области техники должно быть очевидно, что можно определять текущий угол кручения, на который поворачивается каждый из вторых зажимных элементов лопасти относительно втулки 16 верхнего несущего винта, в зависимости от предварительно полученного соответствующего соотношения между углом кручения, на который поворачивается каждый из вторых зажимных элементов лопасти относительно втулки 16 верхнего несущего винта, и состояниями вращения вторых электродвигателей 49 после определения текущих состояний вращения вторых электродвигателей 49. При этом указанное соответствующее соотношение между углом кручения, на который поворачивается каждый из вторых зажимных элементов лопасти относительно втулки 16 верхнего несущего винта, и состояниями вращения вторых электродвигателей 49 можно определить посредством вычислений.
При этом углы кручения, на которые поворачиваются различные вторые зажимные элементы лопасти относительно втулки 16 верхнего несущего винта, могут быть одинаковыми или отличаться друг от друга.
(2) Требуемый второй угол кручения, на который поворачивается каждый из вторых зажимных элементов лопасти относительно втулки 16 верхнего несущего винта, определяют в зависимости от команды на управление полетом и текущего угла кручения, на который поворачивается каждый из вторых зажимных элементов лопасти относительно втулки 16 верхнего несущего винта;
причем каждый из вторых зажимных элементов лопасти однозначным образом соответствует второму текущему углу кручения.
Получить требуемый второй угол кручения, на который поворачивается каждый из вторых зажимных элементов лопасти относительно втулки 16 верхнего несущего винта, можно путем объединения полученной команды на управление полетом и полученного текущего угла кручения, на который поворачивается каждый из вторых зажимных элементов лопасти относительно втулки 16 верхнего несущего винта, после чего можно выполнить последующие процессы.
При этом, вторые углы кручения, на которые поворачиваются различные вторые зажимные элементы лопасти относительно втулки 16 верхнего несущего винта, могут быть одинаковыми или отличаться друг от друга.
(3) Требуемое второе состояние вращения каждого из вторых электродвигателей 49 определяют в зависимости от требуемого второго угла кручения, на который поворачивается каждый из вторых зажимных элементов лопасти относительно втулки 16 верхнего несущего винта.
Требуемое второе состояние вращения каждого из вторых электродвигателей 49 можно определить в соответствии с предварительно установленным соответствующим соотношением между углом кручения, на который поворачивается каждый из вторых зажимных элементов лопасти относительно втулки 16 верхнего несущего винта, и состояниями вращения вторых электродвигателей 49 после определения требуемого второго угла кручения, на который поворачивается каждый из вторых зажимных элементов лопасти относительно втулки 16 верхнего несущего винта. При этом, требуемые состояния вращения различных вторых электродвигателей 49 могут быть одинаковыми или отличаться друг от друга.
Как можно видеть, способ приведения в действие несущих винтов, предложенный в различных вариантах осуществления настоящего изобретения, позволяет управлять способностью выдвижения трубчатой штанги резьбового стержня в исполнительном механизме, соединенном с несущим винтом так, что возможно взаимодействие различных элементов между трубчатой штангой резьбового стержня и зажимным элементом лопасти так, чтобы обеспечивать кручение зажимного элемента лопасти относительно втулки, уменьшая, тем самым, сложность процесса приведения в действие несущих винтов и решая проблему, связанную со сложностью приводного процесса и характерную для существующих способов приведения в действие несущих винтов приводной системы несущих винтов.
Представленное выше описание относится только к предпочтительным вариантам осуществления настоящего изобретения и не ограничивает настоящее изобретение. При этом, различные модификации, эквивалентные замены и улучшения, в пределах сущности и принципов настоящего изобретения, не выходят за пределы объема защиты настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРИВЕДЕНИЯ ВО ВРАЩЕНИЕ НЕСУЩЕГО ВИНТА И СООТВЕТСТВУЮЩЕЕ УСТРОЙСТВО | 2013 |
|
RU2641382C2 |
| НЕСУЩИЙ ВИНТ | 2005 |
|
RU2296697C1 |
| ТРАНСМИССИЯ ВЕРТОЛЕТА | 2014 |
|
RU2580344C2 |
| МЕХАНИЗМ ПАРИРОВАНИЯ КРУТЯЩЕГО МОМЕНТА ТАРЕЛКИ АВТОМАТА ПЕРЕКОСА | 2006 |
|
RU2397113C2 |
| СТЕНД ДЛЯ ИЗНОСНЫХ ИСПЫТАНИЙ АВТОМАТА ПЕРЕКОСА ВЕРТОЛЕТА | 2019 |
|
RU2728216C1 |
| НЕСУЩИЙ ВИНТ ЛЕТАТЕЛЬНОГО АППАРАТА СО СВОРАЧИВАЮЩИМИСЯ УБИРАЕМЫМИ ЛОПАСТЯМИ | 2017 |
|
RU2668482C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДЕФОРМАЦИИ В СИСТЕМЕ ПРОДОЛЬНОГО УПРАВЛЕНИЯ И УПРАВЛЕНИЯ ОБЩИМ ШАГОМ НЕСУЩЕГО ВИНТА ВЕРТОЛЕТА | 2014 |
|
RU2556043C1 |
| СКОРОСТНОЙ ГИБРИДНЫЙ СООСНЫЙ ЭЛЕКТРОВЕРТОЛЕТ | 2021 |
|
RU2753444C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2009 |
|
RU2415780C1 |
| НЕСУЩИЙ ВИНТ | 2006 |
|
RU2338665C2 |
Изобретение относится к области авиации, в частности к конструкциям винтокрылых летательных аппаратов соосной схемы. Приводная система несущих винтов содержит три первых исполнительных механизма, выполненных с возможность обеспечения наклона стационарной тарелки автомата перекоса нижнего несущего винта. При этом вращающаяся тарелка автомата перекоса нижнего несущего винта, нижние тяговые штанги наклонного рычага и наклонные рычаги зажима лопасти нижнего несущего винта находятся в движении, обеспечивая кручение первых зажимных элементов лопасти относительно втулки нижнего несущего винта. Три вторых исполнительных механизма выполнены с возможность обеспечения наклона стационарной тарелки автомата перекоса верхнего несущего винта так, что вращающаяся тарелка автомата перекоса, L-образные рычаги рулевой тяги, нижние рулевые тяги, тяговые штанги, верхние рулевые тяги, верхние тяговые штанги наклонного рычага и наклонные рычаги зажима лопасти верхнего несущего винта находятся в движении, обеспечивая кручение вторых зажимных элементов лопасти верхнего несущего винта. Обеспечивается упрощение конструкции, что позволяет решить проблемы, связанные с низкой эффективностью процесса и неудобством при проведении испытаний и технического обслуживания. 7 з.п. ф-лы, 7 ил.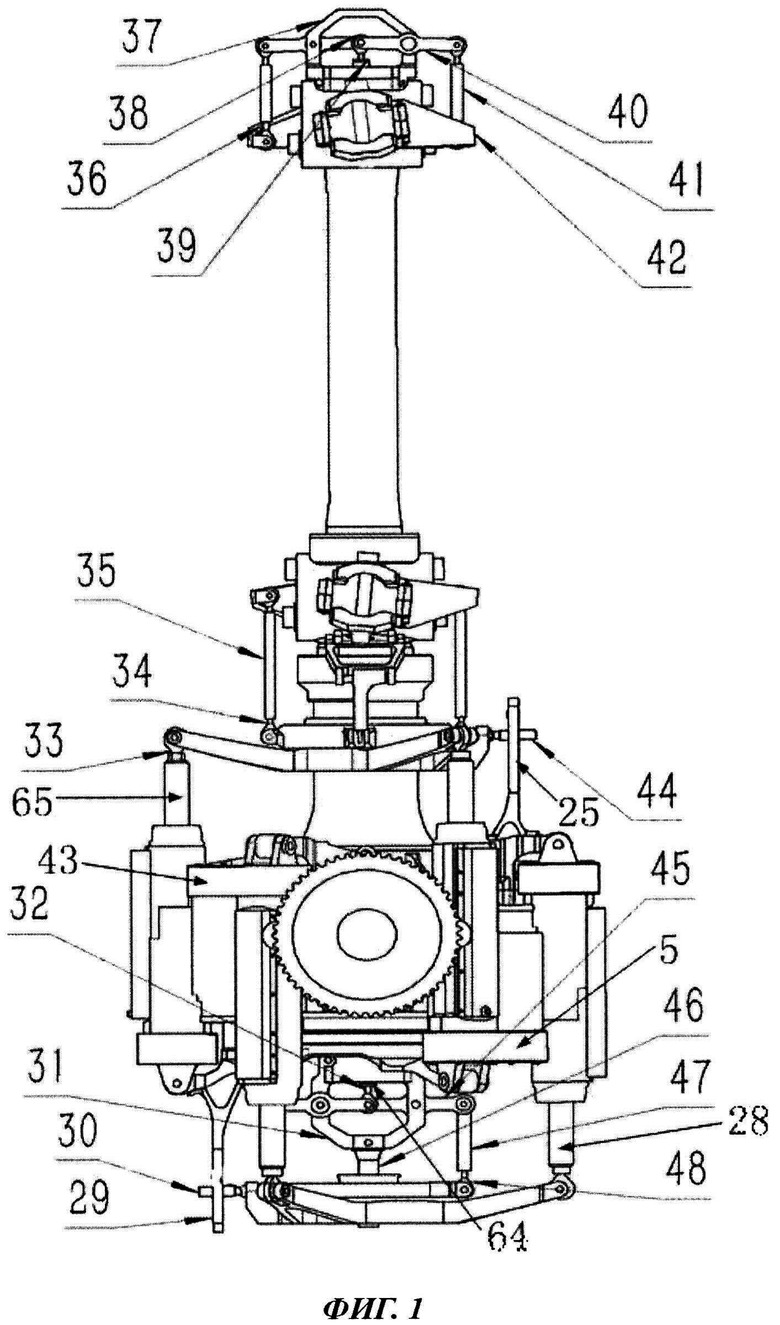
1. Приводная система несущих винтов, применимая в отношении двухвинтового автономного вертолета соосной схемы, отличающаяся тем, что указанный двухвинтовой автономный вертолет соосной схемы содержит:
наружный вал (19);
втулку (14) нижнего несущего винта, закрепленную с наружной стороны одного конца наружного вала (19);
по меньшей мере два первых зажимных элемента лопасти, соединенных с втулкой (14) нижнего несущего винта, причем каждый из указанных первых зажимных элементов лопасти выполнен с возможностью кручения относительно втулки (14) нижнего несущего винта и содержит первый зажим (20) лопасти и второй зажим (22) лопасти, причем указанный первый зажим (20) лопасти и указанный второй зажим (22) лопасти совместно зажимают лопасть нижнего несущего винта;
внутренний вал (15);
втулку (16) верхнего несущего винта, закрепленную с наружной стороны одного конца внутреннего вала (15);
по меньшей мере два вторых зажимных элемента лопасти, соединенных с втулкой (16) верхнего несущего винта, причем каждый из указанных вторых зажимных элементов лопасти выполнен с возможностью кручения относительно втулки (16) верхнего несущего винта и содержит третий зажим (17) лопасти и четвертый зажим (18) лопасти, причем указанный третий зажим (17) лопасти и указанный четвертый зажим (18) лопасти совместно зажимают лопасть верхнего несущего винта;
коробку, вмещающую в себя зубчатую передачу и содержащую верхнюю крышку (26), корпус (27) коробки и нижнюю крышку (1), причем указанная зубчатая передача соединена с наружным валом (19) и внутренним валом (15);
синхронный шкив (7), соединенный с указанной зубчатой передачей, причем вращение указанного синхронного шкива (7) обеспечивает приведение зубчатой передачи во вращение для приведения во вращение наружного вала (19) и внутреннего вала (15), причем наружный вал (19) выполнен с возможностью вращения в противоположном направлении относительно внутреннего вала (15), причем втулка (14) нижнего несущего винта является неподвижной относительно наружного вала (19), а втулка (16) верхнего несущего винта является неподвижной относительно внутреннего вала (15);
причем указанная приводная система несущих винтов содержит приводную систему верхнего несущего винта и приводную систему нижнего несущего винта,
причем приводная система нижнего несущего винта содержит:
по меньшей мере два наклонных рычага (13) зажима лопасти нижнего несущего винта, один конец каждого из которых закреплен на заданной монтажной поверхности соответствующего первого зажимного элемента лопасти;
по меньшей мере две нижние тяговые штанги (35) наклонного рычага, один конец каждой из которых соединен с другим концом соответствующего наклонного рычага (13) зажима лопасти нижнего несущего винта;
несущую башню (10), которая надета на наружный вал (19) одним концом, закрепленным на наружной крышке (26);
вращающуюся тарелку (24) автомата перекоса нижнего несущего винта, которая надета на стационарную тарелку (11) автомата перекоса нижнего несущего винта и соединена с другим концом каждой из указанных нижних тяговых штанг (35) наклонного рычага;
по меньшей мере два блока управления нижнего несущего винта, один конец каждого из которых соединен с втулкой (14) нижнего несущего винта, а другой конец соединен с вращающейся тарелкой (24) автомата перекоса нижнего несущего винта для приведения во вращение указанной вращающейся тарелки (24) автомата перекоса нижнего несущего винта при вращении втулки (14) нижнего несущего винта с наружным валом (19);
стационарную тарелку (11) автомата перекоса нижнего несущего винта, которая надета на указанную несущую башню (10) посредством подшипника (57) скольжения нижнего несущего винта и соединена с вращающейся тарелкой (24) автомата перекоса нижнего несущего винта посредством подшипника (57) скольжения нижнего несущего винта, причем вращающаяся тарелка (24) автомата перекоса нижнего несущего винта и стационарная тарелка (11) автомата перекоса нижнего несущего винта выполнены с возможностью вращения независимо друг от друга;
монтажное основание (2) исполнительного механизма, жестко соединенное с нижней крышкой (1);
по меньшей мере три первых исполнительных механизма (8), установленных на указанном монтажном основании (2) исполнительного механизма, причем каждый из указанных первых исполнительных механизмов (8) содержит корпус и первую трубчатую штангу (65) резьбового стержня, одним своим концом расположенную в указанном корпусе, причем первая трубчатая штанга (65) резьбового стержня выполнена с возможностью выдвижения вверх и вниз, при этом конец каждой первой трубчатой штанги (65) резьбового стержня, выступающий из указанного корпуса, соединен с стационарной тарелкой (11) автомата перекоса нижнего несущего винта с тем, чтобы обеспечить наклон указанной стационарной тарелки (11) автомата перекоса нижнего несущего винта в конкретном направлении при выдвижении вверх и вниз первой трубчатой штанги (65) резьбового стержня и, тем самым, обеспечить наклон вращающейся тарелки (24) автомата перекоса нижнего несущего винта в конкретном направлении;
по меньшей мере три первых электродвигателя (9), каждый из которых соединен с соответствующим первым исполнительным механизмом (8) и выполнен с возможностью управления первой трубчатой штангой (65) резьбового стержня соответствующего первого исполнительного механизма (8) для ее выдвижения вверх и вниз;
первый запорный стержень (25), один конец которого закреплен в месте, отличном от места крепления несущей башни (10), на верхней крышке (26), а в другом конце которого предусмотрено сквозное отверстие;
первый ползун (44), расположенный на стационарной тарелке (11) автомата перекоса нижнего несущего винта и выполненный с возможностью вхождения в указанное сквозное отверстие первого запорного стержня (25) для обеспечения возможности наклона стационарной тарелки (11) автомата перекоса нижнего несущего винта в конкретном направлении и блокировки ее вращения совместно с вращающейся тарелкой (24) автомата перекоса нижнего несущего винта;
причем приводная система верхнего несущего винта содержит:
по меньшей мере два наклонных рычага (42) зажима лопасти верхнего несущего винта, один конец каждого из которых закреплен на заданной монтажной поверхности соответствующего второго зажимного элемента лопасти;
по меньшей мере две верхние тяговые штанги (41) наклонного рычага, один конец каждой из которых соединен с другим концом соответствующего наклонного рычага (42) зажима лопасти верхнего несущего винта;
по меньшей мере две верхние рулевые тяги (40) верхнего несущего винта, один конец каждой из которых соединен с другим концом соответствующей верхней тяговой штанги (41) наклонного рычага;
верхнюю пробку (39) тяговой штанги, соединенную с другим концом каждой из верхних рулевых тяг (40) верхнего несущего винта;
по меньшей мере две тяговые штанги (56), расположенные внутри внутреннего вала (15), один конец каждой из которых соединен с соответствующей верхней рулевой тягой (40) верхнего несущего винта посредством указанной верхней пробки (39) тяговой штанги;
нижнюю пробку (64) тяговой штанги;
по меньшей мере две нижние рулевые тяги (45) верхнего несущего винта, один конец каждой из которых соединен с указанной нижней пробкой (64) тяговой штанги и соединен с другим концом соответствующей тяговой штанги (56) посредством нижней пробки (56) тяговой штанги;
по меньшей мере два L-образных рычага (47) рулевой тяги верхнего несущего винта, причем один конец каждого из указанных L-образных рычагов (47) рулевой тяги верхнего несущего винта соединен с другим концом соответствующей нижней рулевой тяги (45) верхнего несущего винта;
подвижную штангу (46) тарелки автомата перекоса верхнего несущего винта;
вращающуюся тарелку (4) автомата перекоса верхнего несущего винта, которая надета на подвижную штангу (46) вращающейся тарелки автомата перекоса верхнего несущего винта посредством подшипника (59) скольжения верхнего несущего винта и соединена с другим концом L-образного рычага (47) рулевой тяги верхнего несущего винта так, что обеспечена возможность приведения указанной вращающейся тарелки (4) автомата перекоса верхнего несущего винта во вращение под действием L-образных рычагов (47) рулевой тяги верхнего несущего винта и нижней рулевой тяги (45) верхнего несущего винта при вращении втулки (16) верхнего несущего винта совместно с внутренним валом (15);
стационарную тарелку (3) автомата перекоса верхнего несущего винта, которая надета на указанную вращающуюся тарелку (4) автомата перекоса верхнего несущего винта, причем указанная вращающаяся тарелка (4) автомата перекоса верхнего несущего винта и стационарная тарелка (3) автомата перекоса верхнего несущего винта выполнены с возможностью вращения независимо друг от друга;
по меньшей мере три вторых исполнительных механизма (58), установленных на указанной верхней крышке (26), причем каждый из вторых исполнительных механизмов (58) содержит корпус и вторую трубчатую штангу (28) резьбового стержня, одним своим концом расположенную в указанном корпусе, причем вторая трубчатая штанга (28) резьбового стержня выполнена с возможностью выдвижения вверх и вниз, при этом конец каждой второй трубчатой штанги (28) резьбового стержня, выступающий из указанного корпуса, соединен с стационарной тарелкой (3) автомата перекоса верхнего несущего винта с тем, чтобы обеспечить наклон указанной стационарной тарелки (3) автомата перекоса верхнего несущего винта в конкретном направлении при выдвижении вверх и вниз указанной второй трубчатой штанги (28) резьбового стержня и, тем самым, обеспечить наклон вращающейся тарелки (4) автомата перекоса верхнего несущего винта в конкретном направлении;
по меньшей мере три вторых электродвигателя (49), каждый из которых соединен со второй трубчатой штангой (28) резьбового стержня соответствующего второго исполнительного механизма (58) и управляет второй трубчатой штангой (28) резьбового стержня соответствующего второго исполнительного механизма (58) для ее выдвижения вверх и вниз;
второй запорный стержень (29), один конец которого закреплен на указанном монтажном основании (2) исполнительного механизма, а в другом конце которого предусмотрено сквозное отверстие;
второй ползун (30), расположенный на стационарной тарелке (3) автомата перекоса верхнего несущего винта и входящий в указанное сквозное отверстие второго запорного стержня (29) для обеспечения возможности наклона стационарной тарелки (3) автомата перекоса верхнего несущего винта в конкретном направлении и блокировки ее вращения совместно с вращающейся тарелкой (4) автомата перекоса верхнего несущего винта.
2. Система по п. 1, отличающаяся тем, что приводная система верхнего несущего винта дополнительно содержит:
верхнюю раму (37) внутреннего вала, соединенную с каждой из верхних рулевых тяг (40) верхнего несущего винта для обеспечения опоры каждой из верхних рулевых тяг (40) верхнего несущего винта без влияния на их вращение, причем один конец указанной верхней рамы (37) внутреннего вала прикреплен к концу внутреннего вала (15), на котором установлена втулка (15) верхнего несущего винта;
нижнюю раму (31) внутреннего вала, соединенную с каждой из нижних рулевых тяг (45) верхнего несущего винта для обеспечения опоры каждой из нижних рулевых тяг (45) верхнего несущего винта без влияния на их вращение, причем один конец указанной нижней рамы (31) внутреннего вала прикреплен к концу внутреннего вала (15), а другой ее конец соединен с концом подвижной штанги (46) наклонной тарелки нижнего несущего винта, на которой установлена вращающаяся тарелка (4) автомата перекоса верхнего несущего винта.
3. Система по п. 1 или 2, отличающаяся тем, что приводная система нижнего несущего винта дополнительно содержит:
по меньшей мере три первых редуктора (5), каждый из которых соединен с соответствующим первым электродвигателем (9), причем выходная частота вращения соответствующего первого электродвигателя (9) регулируется каждым из указанных первых редукторов (5);
причем соответствующим образом приводная система верхнего несущего винта дополнительно содержит: по меньшей мере три вторых редуктора (43), каждый из которых соединен с соответствующим вторым электродвигателем (49),
причем выходная частота вращения соответствующего второго электродвигателя (49) регулируется каждым из указанных вторых редукторов (5).
4. Система по п. 3, отличающаяся тем, что первый редуктор (5) и второй редуктор (43) представляют собой редуктор зубчатого типа или редуктор цепного типа.
5. Система по п. 1 или 2, отличающаяся тем, что ширина одного конца наклонного рычага (13) зажима лопасти нижнего несущего винта, закрепленного на первом зажимном элементе лопасти, предпочтительно превышает ширину другого конца наклонного рычага (13) зажима лопасти нижнего несущего винта, причем ширина одного конца наклонного рычага (42) зажима лопасти верхнего несущего винта, закрепленного на втором зажимном элементе лопасти, предпочтительно превышает ширину другого конца наклонного рычага (42) зажима лопасти верхнего несущего винта.
6. Система по п. 1 или 2, отличающаяся тем, что каждый из блоков управления нижнего несущего винта предпочтительно образован запорной тарелкой (21) и L-образным рычагом (23) рулевой тяги нижнего несущего винта, причем один конец указанной запорной тарелки (21) соединен с одним концом L-образного рычага (23) рулевой тяги нижнего несущего винта, а другой конец указанной запорной тарелки (21) соединен с втулкой (14) нижнего несущего винта, а другой конец L-образного рычага (23) рулевой тяги нижнего несущего винта соединен с вращающейся тарелкой (24) автомата перекоса нижнего несущего винта.
7. Система по п. 1 или 2, отличающаяся тем, что первый ползун (44) выполнен так, чтобы входить в сквозное отверстие первого запорного стержня (25), не выходя наружу из указанного сквозного отверстия;
или указанный первый ползун (44) выполнен так, чтобы входить в указанное сквозное отверстие первого запорного стержня (25) и выходить наружу из указанного сквозного отверстия.
8. Система по п. 1 или 2, отличающаяся тем, что второй ползун (30) выполнен так, чтобы входить в сквозное отверстие второго запорного стержня (29), не выходя наружу из указанного сквозного отверстия;
или указанный второй ползун (30) выполнен так, чтобы входить в указанное сквозное отверстие второго запорного стержня (29) и выходить наружу из указанного сквозного отверстия.
| СИСТЕМА ДВУХ СООСНЫХ НЕСУЩИХ ВИНТОВ ЛЕТАТЕЛЬНОГО АППАРАТА | 1999 |
|
RU2155702C1 |
| EP 1944234 A10, 16.07.2008 | |||
| CN 103318407 A, 25.09.2013 | |||
| US 4367063 A1, 04.01.1983 | |||
| МЕХАНИЗМ АВТОМАТА ПЕРЕКОСА ВЕРТОЛЕТА | 2011 |
|
RU2485017C2 |

