Предпосылки создания изобретения
1. Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к системе управления гибридного транспортного средства, которое перемещается с использованием, по меньшей мере, энергии двигателя или энергии роторной электрической машины.
2. Описание предшествующего уровня техники
[0002] Гибридное транспортное средство, которое включает в себя двигатель и двигатель-генератор, раскрыто в публикации японской патентной заявки №2014-231244 (JP 2014-231244 А). Это гибридное транспортное средство включает в себя блок управления двигателем и гибридный блок управления. Гибридный блок управления управляет двигателем-генератором и выдает управляющий сигнал двигателя в блок управления двигателем посредством коммуникации с блоком управления двигателем. Блок управления двигателем управляет двигателем в соответствии с управляющим сигналом двигателя, принимаемого от гибридного блока управления. Гибридный блок управления прекращает работу двигателя, размыкая реле для подачи электрической энергии на клапан впрыска топлива двигателя, когда возникает сбой коммуникации с блоком управления двигателем. Таким образом, даже когда возникает сбой в коммуникации между гибридным блоком управления и блоком управления двигателем, гибридный блок управления может непосредственно остановить двигатель без взаимодействия с блоком управления двигателем. Таким образом, избыточное увеличение мощности двигателя может быть предотвращено.
[0003] В гибридном транспортном средстве, раскрытом в JP 2014-231244 А, работа двигателя прекращается, когда происходит сбой коммуникации между гибридным блоком управления и блоком управления двигателем. Таким образом, транспортное средство не может осуществить эвакуационное перемещение, используя мощность двигателя.
Сущность изобретения
[0004] Настоящим изобретением предлагается система управления гибридного транспортного средства, которая позволяет обеспечить эвакуационное перемещение транспортного средства посредством использования мощности двигателя, при возникновении сбоя коммуникации между первым блоком управления (блок управления двигателем) и вторым блоком управления (гибридным блоком управления).
[0005] В системе управления гибридного транспортного средства в соответствии с настоящим изобретением, гибридное транспортное средство выполнено с возможностью перемещения, используя мощность, по меньшей мере, одного из двигателя и роторной электрической машины. Система управления содержит первый электронный блок управления и второй электронный блок управления. Первый электронный блок управления выполнен с возможностью управлять двигателем. Второй электронный блок управления выполнен с возможностью управлять роторной электрической машиной. Второй электронный блок управления выполнен с возможностью выдавать сигнал управления двигателем в первый блок электронного управления посредством коммуникации с первым электронным блоком управления. Первый электронный блок управления выполнен с возможностью: а) управлять двигателем в соответствии с сигналом управления двигателем, принятым из второго электронного блока управления, при отсутствии сбоя коммуникации со вторым электронным блоком управления; и b) выполнять управление фиксированным функционированием, при котором двигатель управляется таким образом, что, по меньшей мере, одна величина из скорости вращения, выходной мощности и выходного крутящего момента двигателя становится равной соответствующему фиксированному значению, когда произошел сбой коммуникации со вторым электронным блоком управления.
[0006] В соответствии с такой конфигурацией, первый электронный блок управления не останавливает двигатель, а выполняет управление фиксированным функционированием, в котором двигатель управляется путем фиксирования, по меньшей мере, одной величины из скорости, выходной мощности и выходного крутящего момента двигателя, когда происходит сбой коммуникации со вторым электронным блоком управления. Соответственно транспортное средство может осуществлять эвакуационное перемещение, используя мощность двигателя, даже когда происходит сбой коммуникации между первым электронным блоком управления и вторым электронным блоком управления (когда сигнал управления двигателем не может быть выдан из второго электронного блока управления в первый электронный блок управления).
[0007] Второй электронный блок управления может быть выполнен с возможностью управлять роторной электрической машиной таким образом, чтобы передавать требуемую мощность привода, запрошенную пользователем, на ведущее колесо при предварительном условии, что двигатель управляется в соответствии с сигналом управления двигателем при отсутствии сбоя коммуникации с первым электронным блоком управления. В дополнение, второй электронный блок управления может быть выполнен с возможностью управлять роторной электрической машиной таким образом, чтобы передавать требуемую пользователем мощность привода на ведущее колесо при предварительном условии, что двигатель управляется посредством выполнения управления фиксированным функционированием, когда произошел сбой коммуникации с первым электронным блоком управления.
[0008] В соответствии с такой конфигурацией, выходная мощность роторной электрической машины регулируется таким образом, чтобы передавать требуемую мощность привода, запрошенную пользователем, на ведущее колесо при предварительном условии, что двигатель управляется посредством управления фиксированным функционированием, даже когда происходит сбой коммуникации между первым электронным блоком управления и вторым электронным блоком управления. Таким образом, требуемая мощность привода, запрашиваемая пользователем, может быть передана на ведущее колесо даже во время эвакуационного перемещения.
[0009] Первый электронный блок управления может быть выполнен с возможностью останавливать двигатель без выполнения управления фиксированным функционированием в случае, когда произошел сбой коммуникации со вторым электронным блоком управления, и, по меньшей мере, одна величина из скорости вращения, выходной мощности и выходного крутящего момента двигателя отклоняется от соответствующего фиксированного значения на заданную величину или больше.
[0010] Команда на остановку двигателя не может быть выдана из второго электронного блока управления в первый электронный блок управления, когда произошел сбой коммуникации между первым электронным блоком управления и вторым электронным блоком управления. Тем не менее, в вышеописанной конфигурации, первый электронный блок управления останавливает двигатель без выполнения управления фиксированным функционированием в случае, когда происходит сбой коммуникации между первым электронным блоком управления и вторым электронным блоком управления и, по меньшей мере, одна величина из скорости, выходной мощности и выходного крутящего момента двигателя отклоняется от фиксированного значения на заданную величину или больше. Соответственно, когда происходит сбой коммуникации между первым электронным блоком управления и вторым электронным блоком управления, двигатель может не только непрерывно управляться посредством управления фиксированным функционированием, но двигатель также может быть и остановлен.
[0011] Двигатель может быть механически соединен с роторной электрической машиной. Первый электронный блок управления может выдавать запрос на остановку, чтобы остановить двигатель без выполнения управления фиксированным функционированием в случае, когда произошел сбой коммуникации со вторым электронным блоком управления, и скорость вращения двигателя отклоняется от фиксированного значения на заданную величину или больше. В дополнение, второй электронный блок управления может быть выполнен с возможностью управлять роторной электрической машиной таким образом, чтобы скорость вращения двигателя отклонялась от фиксированного значения на заданную величину или больше в случае, когда произошел сбой коммуникации с первым электронным блоком управления, и имеется запрос на остановку.
[0012] Когда происходит сбой коммуникации между первым электронным блоком управления и вторым электронным блоком управления, второй электронный блок управления определяет наличие запроса на остановку двигателя (то есть, ситуация, когда двигатель должен быть остановлен). Даже в таком случае, второй электронный блок управления не может выдать управляющий сигнал на остановку двигателя в первый электронный блок управления из-за наличия сбоя коммуникации. Тем не менее, в вышеописанной конфигурации, первый электронный блок управления останавливает двигатель, когда скорость вращения двигателя отклоняется от фиксированного значения на заданную величину или больше. Кроме того, когда установлено наличие запроса на остановку двигателя (то есть ситуация, когда двигатель должен быть остановлен), второй электронный блок управления побуждает скорость вращения двигателя отклоняться от фиксированного значения на заданную величину или больше, управляя роторной электрической машиной, которая механически соединена с двигателем. Таким образом, даже когда происходит сбой коммуникации между первым электронным блоком управления и вторым электронным блоком управления, второй электронный блок управления может опосредовано остановить двигатель.
Краткое описание чертежей
[0013] Признаки, преимущества, техническое и промышленное значение примерных вариантов осуществления настоящего изобретения будут описаны ниже со ссылками на сопровождающие чертежи, на которых одни и те же ссылочные позиции обозначают одни и те же элементы, и на которых:
Фиг. 1 представляет собой общую блок-схему транспортного средства;
Фиг. 2 представляет собой коллинеарную схему механизма разветвления потока мощности;
Фиг. 3 представляет собой блок-схему алгоритма (часть 1), которая показывает процедуру обработки данных в ЭБУ двигателя;
Фиг. 4 представляет собой блок-схему алгоритма (часть 1), которая показывает процедуру обработки данных в гибридном ЭБУ;
Фиг. 5 представляет собой блок-схему алгоритма (часть 2), которая показывает процедуру обработки данных в ЭБУ двигателя;
Фиг. 6 представляет собой блок-схему алгоритма (часть 2), которая показывает процедуру обработки данных в гибридном ЭБУ;
Фиг. 7 изображает диаграмму одного примера, которая показывает изменение скорости Ne вращения двигателя, мощности привода и крутящего момента Tm1 первого ДГ при возникновении ENG-HV сбоя коммуникации;
Фиг. 8 представляет собой диаграмму одного примера, который показывает изменение скорости Ne вращения двигателя, мощности привода и крутящего момента Tm1 первого ДГ при запуске или остановке двигателя при отказоустойчивом управлении из-за наличия ENG-HV сбоя коммуникации; и
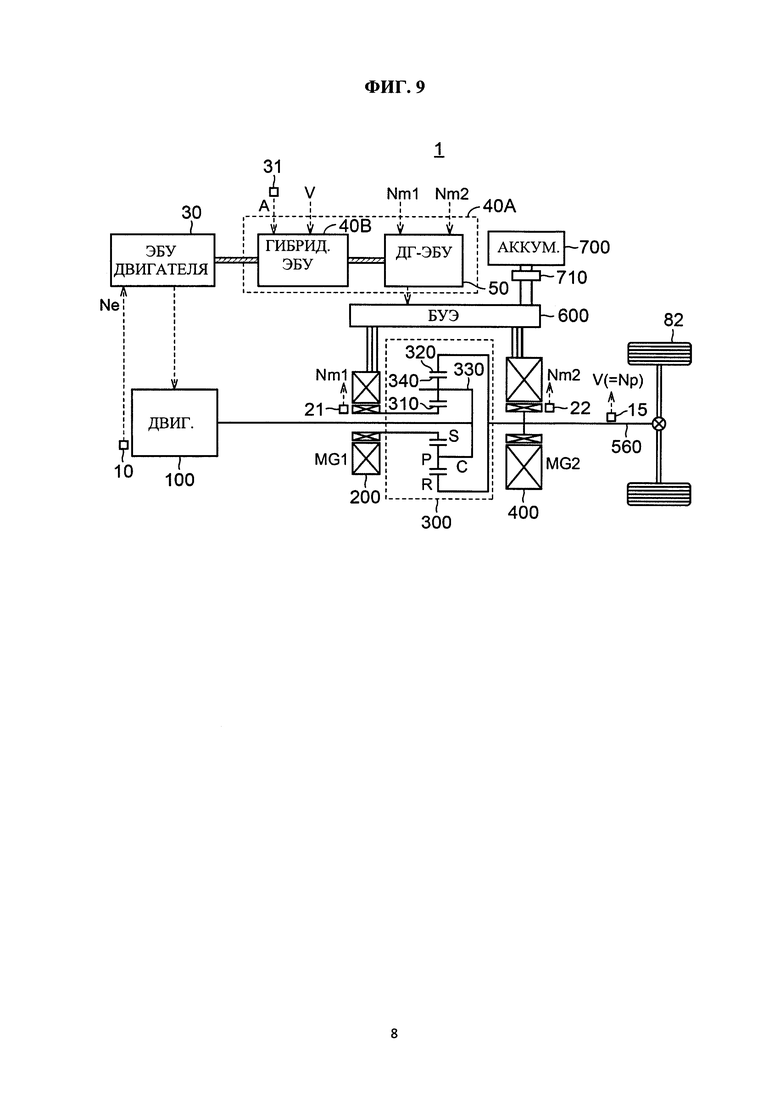
Фиг. 9 представляет собой общую блок-схему транспортного средства.
Подробное описание вариантов осуществления
[0014] Далее будет приведено описание вариантов осуществления настоящего изобретения со ссылкой на прилагаемые чертежи. В последующем описании одни и те же компоненты обозначены одними и теми же ссылочными позициями. Названия и функции их также одинаковы. Таким образом, их подробное описание не будет повторяться.
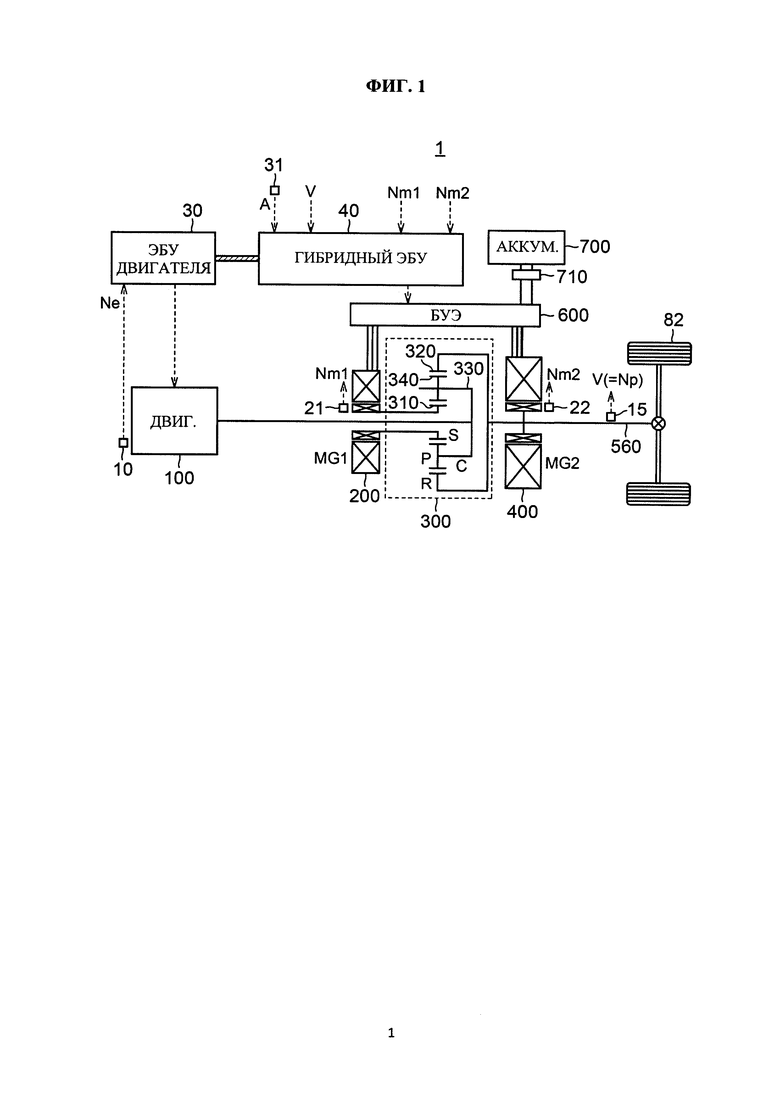
[0015] Фиг. 1 является общей блок-схемой транспортного средства 1 в соответствии с данным вариантом осуществления. Транспортное средство 1 включает в себя двигатель 100, первый двигатель-генератор (ДГ) 200, механизм 300 разветвления потоков мощности, второй ДГ 400, выходной вал 560, приводные колеса 82, блок 600 управления электропитанием (БУЭ), аккумулятор 700 и главное реле 710 системы (ГРС). Транспортное средство 1 дополнительно включает в себя электронный блок 30 управления двигателем (ЭБУ) и гибридный ЭБУ 40.
[0016] Транспортное средство 1 является гибридным транспортным средством, которое движется с использованием мощности, по меньшей мере, одного из двигателя 100 и второго ДГ 400. Двигатель 100 является двигателем внутреннего сгорания, который вырабатывает мощность посредством сжигания топлива. Первый ДГ 200 и второй ДГ 400 представляет собой роторные электрические машины переменного тока и способны функционировать в качестве двигателя и генератора.
[0017] Далее описан случай, когда скорость вращения двигателя 100, скорость вращения первого ДГ 200, скорость вращения второго ДГ 400, соответственно, описаны как «скорость Ne вращения двигателя», «скорость Nm1 вращения первого ДГ» и «скорость Nm2 вращения второго ДГ». Кроме того, имеется случай, когда выходной крутящий момент двигателя 100, выходной крутящий момент первого ДГ 200 и выходной крутящий момент второго ДГ 400, соответственно, описаны как «крутящий момент Те двигателя», «крутящий момент Tm1 первого ДГ» и «крутящий момент Tm2 второго ДГ». Далее, имеется случай, когда выходная мощность двигателя 100 и выходная мощность второго ДГ 400 соответственно описываются как «мощность Ре двигателя» и «мощность Pm2 второго ДГ».
[0018] Механизм 300 разветвления потоков мощности представляет собой механизм планетарной зубчатой передачи, который имеет солнечную шестерню (S) 310, коронную шестерню (R) 320, сателлитную шестерню (Р) 340, находящуюся в зацеплении с солнечной шестерней (S) 310 и коронной шестерней (R) 320, и водило (С) 330, удерживающее сателлитную шестерню (Р) 340 таким образом, чтобы обеспечить ее вращение и поворот. Водило (С) 330 соединено с двигателем 100. Солнечная шестерня (S) 310 соединена с первым ДГ 200. Коронная шестерня (R) 320 соединена со вторым ДГ 400 и приводными колесами 82 через выходной вал 560.
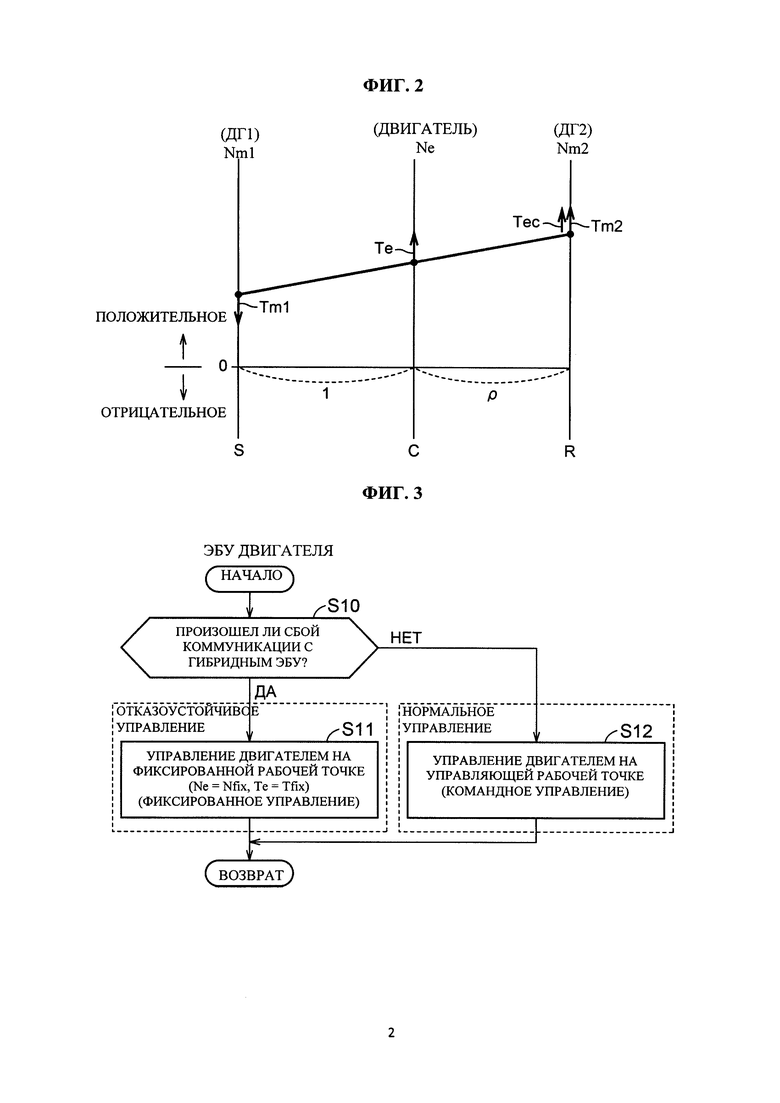
[0019] Фиг. 2 представляет собой коллинеарную схему механизма 300 разветвления потока мощности. Поскольку двигатель 100, первый ДГ 200 и второй ДГ 400 механически соединены с помощью механизма 300 разветвления потока мощности, то скорость Nm1 вращения первого ДГ (скорость вращения солнечной шестерни (S) 310), скорость Ne вращения двигателя (скорость вращения водила (С) 330) и скорость Nm2 вращения второго ДГ (скорость вращения коронной шестерни (R) 320) имеют взаимосвязь, будучи соединенными прямой линией на коллинеарной схеме механизма 300 разветвления потока мощности (взаимосвязь, в которой, когда любые две скорости вращения определены, оставшаяся скорость вращения также определяется, что в дальнейшем также упоминается, как «взаимосвязь коллинеарной схемы»). Соответственно, когда скорость Nm2 вращения второго ДГ постоянна, то существует положительная корреляция между скоростью Ne вращения двигателя и скоростью Nm1 вращения первого ДГ (взаимосвязь, в которой одна из скоростей вращения снижается, когда другая скорость вращения снижается, и одна из скоростей вращения увеличивается, когда другая скорость вращения увеличивается).
[0020] Как видно опять же из фиг. 1, БУЭ 600 преобразует высоковольтную энергию постоянного тока, которая подается от аккумулятора 700, в энергию переменного тока, и выдает энергию переменного тока на первый ДГ 200 и/или второй ДГ 400. Первый ДГ 200 и/или второй ДГ 400, таким образом, приводятся в движение. БУЭ 600 также преобразует энергию переменного тока, которая генерируется первым ДГ 200 и/или вторым ДГ 400, в энергию постоянного тока и подает энергию постоянного тока на аккумулятор 700. Аккумулятор 700, таким образом, заряжается. БУЭ 600 также может приводить в действие второй ДГ 400 с помощью электрической энергии, генерируемой первым ДГ 200.
[0021] Аккумулятор 700 представляет собой вторичную батарею, которая накапливает высоковольтную энергию постоянного тока (например, около 200 V), используемую для привода первого ДГ 200 и/или второго ДГ 400. Аккумулятор 700 выполнен преимущественно в виде никель-металл-гибридной батареи или литий-ионной батареи.
[0022] ГРС 710 представляет собой реле, которое соединяет/разъединяет аккумулятор 700 с БУЭ 600 и электрической системой, включающей в себя первый ДГ 200 и второй ДГ 400.
[0023] Транспортное средство 1 дополнительно снабжено множеством датчиков, которые определяют различные типы необходимой информации для управления транспортным средством 1, например датчиком 10 скорости вращения двигателя, датчиком 15 скорости вращения выходного вала, датчиком 31 положения педали акселератора, и решающими устройствами 21, 22. Датчик 10 скорости вращения двигателя определяет скорость Ne вращения двигателя и выводит результат определения в ЭБУ 30 двигателя. Решающее устройство 21 определяет скорость Nm1 вращения первого ДГ и выводит результат определения в гибридный ЭБУ 40. Решающее устройство 22 определяет скорость Nm2 вращения второго ДГ и выводит результат определения в гибридный ЭБУ 40. Датчик 15 скорости вращения выходного вала определяет скорость Np вращения выходного вала 560 в качестве скорости V транспортного средства и выводит результат определения в гибридный ЭБУ 40. Датчик 31 положения педали акселератора определяет величину воздействия пользователя на педаль акселератора (в дальнейшем также упоминается, как «величина А воздействия на педаль акселератора») и выводит результат определения в гибридный ЭБУ 40.
[0024] Каждый из ЭБУ 30 двигателя и гибридного ЭБУ 40 имеет встроенное центральное процессорное устройство (ЦПУ) и встроенную память, которые не показаны, и выполняет определенный процесс вычисления на основании информации, хранящейся в упомянутой памяти, и информации каждого из датчиков. Следует отметить, что, несмотря на то, что на фиг. 1 показан гибридный ЭБУ 40, гибридный ЭБУ 40В и ДГ-ЭБУ 50 могут быть интегрированы в качестве единого ЭБУ 40А, как показано на фиг. 9. На фиг. 9 ЭБУ 40А является одним из примеров «второго электронного блока управления». В этом случае, ДГ-ЭБУ 50 принимает данные о скорости Nm1 вращения первого ДГ и скорости Nm2 вращения второго ДГ от решающего устройства 21 и решающего устройства 22 соответственно.
[0025] Гибридный ЭБУ 40 соединен с ЭБУ 30 двигателя по линии связи и взаимно обменивается данными с ЭБУ 30 двигателя для общего управления двигателем 100, первым ДГ 200 и вторым ДГ 400.
[0026] Более конкретно, гибридный ЭБУ 40 вычисляет величину мощности привода, которая требуется пользователю транспортного средства 1 (в дальнейшем также упоминается, как «требуемая мощность Preq привода»), на основании величины А воздействия на педаль акселератора, полученной от датчика 31 положения педали акселератора, скорости V транспортного средства, полученной от датчика 15 скорости вращения выходного вала, и т.п. Гибридный ЭБУ 40 делит вычисленную требуемую мощность Preq привода на требуемую мощность Pereq двигателя и требуемую мощность Pm2req второго ДГ при контроле состояния аккумулятора 700. Затем, гибридный ЭБУ 40 генерирует сигнал управления двигателем (сигнал Necom управления скоростью вращения двигателя, сигнал Tecom управления крутящим моментом двигателя) для приведения в соответствие мощности Ре двигателя с требуемой мощностью Pereq двигателя, генерирует сигнал управления первым ДГ (сигнал Nm1com управления скоростью вращения первого ДГ, сигнал Tm1com управления крутящим моментом первого ДГ) для передачи выходной мощности двигателя 100 на выходной вал 560, и генерирует сигнал управления вторым ДГ (сигнал Nm2com управления скоростью вращения второго ДГ, сигнал Tm2com управления крутящим моментом второго ДГ) для приведения в соответствие мощности Pm2 второго ДГ с требуемой мощностью Pm2req второго ДГ. Гибридный ЭБУ 40 затем выдает сигнал управления двигателем на ЭБУ 30 двигателя и получает информацию, указывающую состояние двигателя 100 от ЭБУ 30 двигателя. Гибридный ЭБУ 40 вырабатывает сигнал управления первым ДГ и сигнал управления вторым ДГ и получает информацию, указывающую на состояния первого ДГ 200 и второго ДГ 400.
[0027] ЭБУ 30 двигателя выдает информацию, указывающую на состояние двигателя 100 (например, скорость Ne вращения двигателя, определяемую датчиком 10 скорости вращения двигателя, и т.п.), в гибридный ЭБУ 40. ЭБУ 30 двигателя также управляет выходной мощностью двигателя 100 (более конкретно, степенью открытия дроссельной заслонки, углом опережения зажигания, количеством впрыска топлива и т.п.), в соответствии с сигналом управления двигателем, поступающим из гибридного ЭБУ 40.
[0028] Гибридный ЭБУ 40 получает информацию, указывающую на состояние первого ДГ 200 и второго ДГ 400 (например, скорость Nm1 вращения первого ДГ и скорость Nm2 вращения второго ДГ, соответственно определяемые решающими устройствами 21, 22 и т.п.). Гибридный ЭБУ 40 также управляет выходной мощностью первого ДГ 200 и второго ДГ 400 (более конкретно, величиной возбуждения и т.п.), в соответствии с сигналом управления первым ДГ и сигналом управления вторым ДГ, соответственно.
[0029] В транспортном средстве 1, который имеет конфигурацию, как описано выше, двигатель 100 не может надлежащим образом управляться в ответ на запрос пользователя, когда происходит сбой коммуникации между ЭБУ 30 двигателя и гибридным ЭБУ 40 (далее именуется, как «ENG-HV сбой коммуникации»). То есть гибридный ЭБУ 40 не может выдать сигнал управления в ЭБУ 30 двигателя. Между тем, так как ЭБУ 30 двигателя не может принимать сигнал управления двигателем из гибридного ЭБУ 40, то ЭБУ 30 двигателя не может выполнять управление двигателем 100.
[0030] В этом случае, считается, что ЭБУ 30 двигателя может плавно остановить двигатель 100 (что соответствует предшествующему уровню техники), чтобы избежать избыточного увеличения выходной мощности двигателя 100. Тем не менее, имеется необходимость решения такой технической задачи, при которой транспортное средство 1 не может осуществить эвакуационное перемещение с использованием мощности двигателя 100, когда двигатель 100 плавно останавливается.
[0031] С учетом вышеизложенного, в этом варианте осуществления, как будет описано ниже, когда происходит ENG-HV сбой коммуникации, выполняется отказоустойчивое управление. ЭБУ 30 двигателя выполняет «фиксированное управление (управление фиксированным функционированием)», в котором двигатель 100 работает таким образом, что рабочая точка двигателя (скорость Ne вращения двигателя и крутящий момент Те двигателя) становится фиксированной рабочей точкой (фиксированная скорость Nfix вращения и фиксированный крутящий момент Tfix). Следует отметить, что фиксированная скорость Nfix вращения, используемая при фиксированном управлении, установлена на положительное значение. То есть двигатель 100 не будет остановлен, но будет поддерживаться в рабочем состоянии во время выполнения фиксированного управления.
[0032] Кроме того, гибридный ЭБУ 40 управляет первым ДГ 200 и вторым ДГ 400, чтобы обеспечить требуемую мощность Preq привода (для передачи требуемой мощности Preq привода на ведущие колеса 82), при предварительном условии, что двигатель 100 управляется посредством фиксированного управления. То есть гибридный ЭБУ 40 управляет первым ДГ 200 таким образом, что рабочая точка первого ДГ (скорость Nm1 вращения первого ДГ и крутящий момент Tm1 первого ДГ) становится равной управляющей рабочей точке первого ДГ (управляющая скорость Nm1com вращения первого ДГ, управляющий крутящий моментом Tm1com первого ДГ), и управляет вторым ДГ 400 таким образом, что рабочая точка второго ДГ (скорость Nm2 вращения второго ДГ и крутящий момент Tm2 второго ДГ) становится равной управляющей рабочей точке второго ДГ (управляющая скорость Nm2com вращения второго ДГ, управляющий крутящий момент Tm2com второго ДГ). Таким образом, если мощность Ре двигателя недостаточно высока для требуемой мощности Pereq двигателя из-за работы двигателя 100 в режиме фиксированного управления, то недостающая величина добавляется к мощности Pm2 второго ДГ. В результате, даже когда имеет место ENG-HV сбой коммуникации, транспортное средство 1 может быть эвакуировано своим ходом, поскольку требуемая мощность Preq привода удовлетворяется мощностью Ре двигателя и мощностью Pm2 второго ДГ.
[0033] Следует отметить, что нормальный режим работы, как будет описано ниже, выполняется, когда отсутствует ENG-HV сбой коммуникации. ЭБУ 30 двигателя выполняет «командное управление», в котором двигатель 100 управляется таким образом, что рабочая точка двигателя становится равной управляющей рабочей точке, которая является следствием сигнала управления двигателем, принимаемого от гибридного ЭБУ 40 (сигнал Necom управления скоростью вращения двигателя, сигнал Tecom управления крутящим моментом двигателя). Более того, гибридный ЭБУ 40 управляет первым ДГ 200 и вторым ДГ 400 таким образом, чтобы удовлетворить требуемую мощность Preq привода при предварительном условии, что двигатель 100 управляется посредством командного управления.
[0034] На фиг. 3 приведена блок-схема алгоритма, которая показывает процедуру обработки данных, выполняемую посредством ЭБУ 30 двигателя. Эта блок-схема алгоритма многократно выполняется через заданные интервалы времени.
[0035] На этапе 10 (в дальнейшем термин «этап» сокращенно обозначается как "S"), ЭБУ 30 двигателя определяет, происходит ли сбой коммуникации с гибридным ЭБУ 40. Например, ЭБУ 30 двигателя может определить, что произошел сбой коммуникации с гибридным ЭБУ 40, когда информация от гибридного ЭБУ 40 не может приниматься непрерывно в течение заданного периода времени.
[0036] Если сбой коммуникации с гибридным ЭБУ 40 не происходит (НЕТ на S10), то ЭБУ 30 двигателя выполняет на этапе S12 описанное выше «командное управление». То есть ЭБУ 30 двигателя управляет двигателем 100 таким образом, что рабочая точка двигателя становится равной управляющей рабочей точке, принятой из гибридного ЭБУ 40.
[0037] С другой стороны, если происходит сбой коммуникации с гибридным ЭБУ 40 (ДА на этапе S10), то ЭБУ 30 двигателя на этапе S11 выполняет описанное выше «фиксированное управление». То есть ЭБУ 30 двигателя управляет двигателем 100 таким образом, что рабочая точка двигателя становится заранее заданной фиксированной рабочей точкой. Таким образом, даже при возникновении ENG-HV сбоя коммуникации, транспортное средство 1 может быть эвакуировано своим ходом, используя мощность двигателя 100.
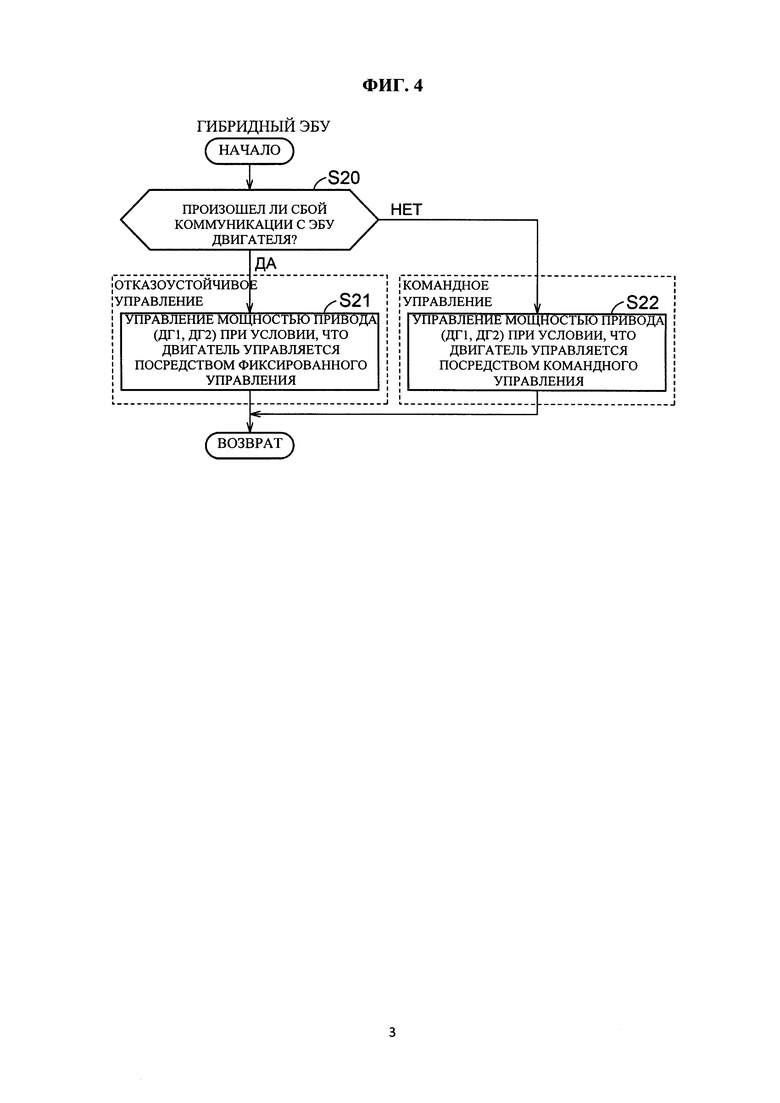
[0038] На фиг. 4 представлена блок-схема алгоритма, которая показывает процедуру обработки данных, выполняемую гибридным ЭБУ 40. Эта блок-схема алгоритма многократно выполняется через заданные интервалы времени.
[0039] На этапе S20 гибридный ЭБУ 40 определяет, происходит ли сбой коммуникации с ЭБУ 30 двигателя.
[0040] Если сбой коммуникации с ЭБУ 30 двигателя не происходит (НЕТ на S20), то на этапе S22 гибридный ЭБУ 40 управляет мощностью привода (первым ДГ 200 и вторым ДГ 400) так, чтобы удовлетворить требуемую мощность Preq привода при предварительном условии, что двигатель 100 управляется в режиме командного управления.
[0041] С другой стороны, при наличии сбоя коммуникации с ЭБУ 30 двигателя (ДА на S20), на этапе S21 гибридный ЭБУ 40 управляет мощностью привода (первым ДГ 200 и вторым ДГ 400) так, чтобы удовлетворить требуемую мощность Preq привода при предварительном условии, что двигатель 100 управляется в режиме фиксированного управления. Соответственно, когда мощность Ре двигателя недостаточно высока для требуемой мощности Pereq двигателя из-за работы двигателя 100 в режиме фиксируемого управления, то недостающая величина добавляется к требуемой мощности Pm2req второго ДГ и компенсируется посредством мощности Pm2 второго ДГ. В результате, даже когда имеет место ENG-HV сбой коммуникации, транспортное средство 1 может быть эвакуировано своим ходом, поскольку удовлетворяется требуемая мощность Preq привода.
[0042] Как было описано до сих пор, если происходит сбой коммуникации с гибридным ЭБУ 40, то ЭБУ 30 двигателя, согласно этому варианту осуществления, не останавливает двигатель 100, а выполняет «фиксированное управление», в котором двигатель 100 работает на рабочей точке двигателя, зафиксированной на заранее определенной фиксированной рабочей точке. Таким образом, даже при возникновении ENG-HV сбоя коммуникации, транспортное средство 1 может быть эвакуировано своим ходом, используя мощность двигателя 100.
[0043] Следует отметить, что, поскольку скорость Ne вращения двигателя и крутящий момент Те двигателя фиксируются посредством фиксированного управления в этом варианте осуществления, то в результате мощность Ре двигателя также фиксируется. Тем не менее, фиксированное управление не ограничивается управлением для фиксирования всех параметров, т.е. скорости Ne вращения двигателя, крутящего момента Те двигателя и мощности Ре двигателя, но может быть управлением для фиксирования, по меньшей мере, одного параметра из скорости Ne вращения двигателя, крутящего момента Те двигателя и мощности Ре двигателя. Например, один параметр из скорости Ne вращения двигателя и крутящего момента Те двигателя может быть зафиксирован с помощью фиксированного управления, а другой параметр может не фиксироваться (то есть, мощность Ре двигателя не фиксируется). В качестве альтернативы, только мощность Ре двигателя может быть зафиксирована посредством фиксированного управления, при этом допускаются колебания скорости Ne вращения двигателя и крутящего момента Те двигателя.
[0044] В описанном выше варианте осуществления, если происходит ENG-HV сбой коммуникации, то двигатель 100 работает на фиксированной рабочей точке при фиксированном управлении, осуществляемом ЭБУ 30 двигателя. Поскольку ENG-HV сбой коммуникации продолжается во время выполнения процесса фиксированного управления, гибридный ЭБУ 40 не может выдать в ЭБУ 30 двигателя команду на остановку двигателя 100.
[0045] То есть, в описанном выше варианте осуществления, гибридный ЭБУ 40 оценивает наличие запроса на остановку двигателя (ситуация, когда двигатель должен быть остановлен), когда имеет место ENG-HV сбой коммуникации. Тем не менее, гибридный ЭБУ 40 не может выдать команду на остановку двигателя 100 в ЭБУ 30 двигателя из-за влияния ENG-HV сбоя коммуникации. Соответственно ЭБУ 30 двигателя поддерживает работу двигателя 100 на фиксированной рабочей точке.
[0046] Далее будет приведено описание другого варианта осуществления. В случае, когда произошел сбой коммуникации с гибридным ЭБУ 40, и скорость Ne вращения двигателя, определяемая датчиком 10 скорости вращения двигателя, отклоняется от фиксированной скорости Nfix вращения на заданную величину α (α>0) или больше, то ЭБУ 30 двигателя не выполняет фиксированное управление, а останавливает двигатель 100. Таким образом, при наличии ENG-HV сбоя коммуникации, двигатель 100 может не только управляться посредством фиксированного управления, но двигатель 100 может быть остановлен без выполнения фиксированного управления.
[0047] Кроме того, в случае, когда произошел сбой коммуникации с ЭБУ 30 двигателя, и имеется запрос на остановку двигателя (ситуация, когда двигатель 100 должен быть остановлен), гибридный ЭБУ 40 управляет первым ДГ 200 таким образом, что скорость Ne вращения двигателя отклоняется от фиксированной скорости Nfix вращения на заданную величину α или больше. Когда посредством такого управления скорость Ne вращения двигателя отклоняется от фиксированной скорости Nfix вращения на заданную величину α или больше, ЭБУ 30 двигателя останавливает двигатель 100. В результате, даже когда имеет место ENG-HV сбой коммуникации, двигатель 100 может опосредовано быть остановлен через управление первым ДГ 200, осуществляемое гибридным ЭБУ 40.
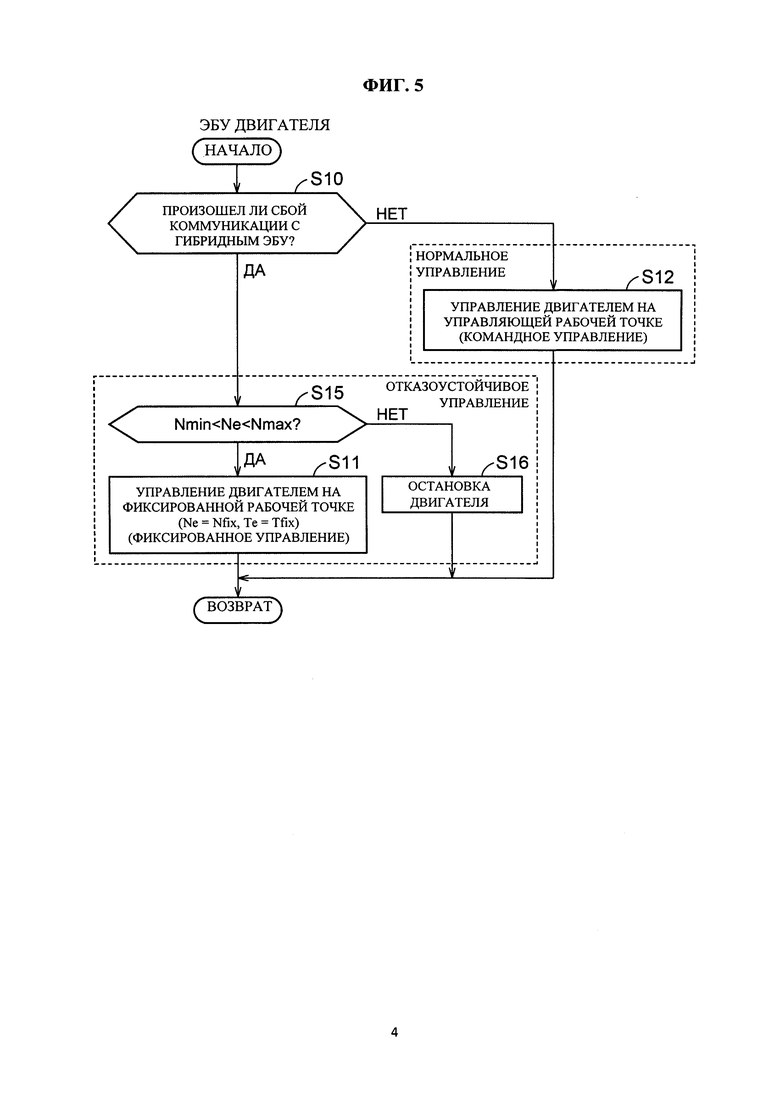
[0048] На фиг. 5 представлена блок-схема алгоритма, которая показывает процедуру обработки данных, выполняемую ЭБУ 30 двигателя. Следует отметить, что из этапов, показанных на фиг. 5, этапы, которые обозначены одними и теми же ссылочными позициями, что и этапы, показанные на вышеописанной фиг. 3, являются уже описанными выше, и, таким образом, их подробное описание не будет повторено.
[0049] Если происходит сбой коммуникации с гибридным ЭБУ 40 (ДА на S10), ЭБУ 30 двигателя выполняет отказоустойчивое управление на этапе S15.
[0050] На этапе S15, ЭБУ 30 двигателя определяет, попадает ли скорость Ne вращения двигателя, определяемая датчиком 10 скорости двигателя, в диапазон от нижней предельной скорости Nmin вращения до верхней предельной скорости Nmax вращения. Здесь нижняя предельная скорость Nmin вращения является величиной, которая получается путем вычитания заданной величины α из фиксированной скорости Nfix вращения (=Nfix-α), а верхняя предельная скорость Nmax вращения является величиной, которая получается путем добавления заданного значения α к фиксированной скорости Nfix вращения (=Nfix+α).
[0051] Если скорость Ne вращения двигателя попадает в диапазон от нижней предельной скорости Nmin вращения до верхней предельной скорости Nmax вращения (ДА на S15), то есть, если скорость Ne вращения двигателя не отклоняется от фиксированной скорости Nfix вращения на заданную величину α или больше, то ЭБУ 30 двигателя выполняет описанное выше «фиксированное управление» на этапе S11. То есть, ЭБУ 30 двигателя управляет двигателем 100 таким образом, что рабочая точка двигателя становится заранее заданной фиксированной рабочей точкой.
[0052] С другой стороны, если скорость Ne вращения двигателя не попадает в диапазон от нижней предельной скорости Nmin вращения до верхней предельной скорости Nmax вращения (НЕТ на этапе S15), то есть, если величина скорости Ne вращения двигателя отклоняется от фиксированной скорости Nfix вращения на заданную величину α или больше, то ЭБУ 30 двигателя не выполняет «фиксированное управление», а останавливает двигатель 100, чтобы снизить скорость Ne вращения двигателя до 0 на этапе S16.
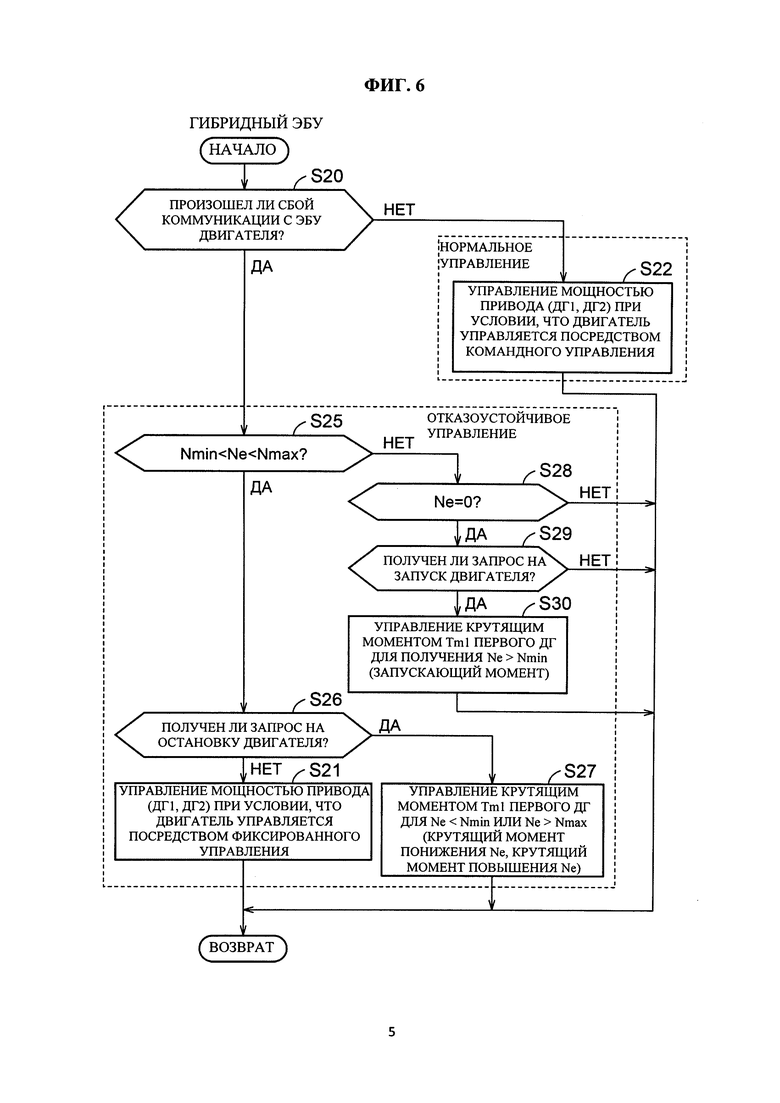
[0053] На фиг. 6 показана блок-схема алгоритма, которая показывает процедуру обработки данных, выполняемую гибридным ЭБУ 40. Следует отметить, что из этапов, показанных на фиг. 6, этапы, которые обозначены одними и теми же ссылочными позициями, что и этапы, показанные на вышеописанной фиг. 4, являются уже описанными и, таким образом, их подробное описание далее не будет повторено.
[0054] Если происходит сбой коммуникации с ЭБУ 30 двигателя (ДА на S20), то гибридный ЭБУ 40 выполняет отказоустойчивое управление на этапе S25.
[0055] На этапе S25, гибридный ЭБУ 40 определяет, попадает ли скорость Ne вращения двигателя в диапазон от нижней предельной скорости Nmin вращения до верхней предельной скорости Nmax вращения. Следует отметить, что гибридный ЭБУ 40 не может получить информацию о скорости Ne вращения двигателя из ЭБУ 30 двигателя при наличии ENG-HV сбоя коммуникации, тем не менее, гибридный ЭБУ 40 может вычислить скорость Ne вращения двигателя из соотношения, показанного на коллинеарной схеме, с использованием скорости Nm1 вращения первого ДГ и скорости Nm2 вращения второго ДГ, которые определяются посредством решающих устройств 21, 22 соответственно.
[0056] Если скорость Ne вращения двигателя попадает в диапазон от нижней предельной скорости Nmin вращения до верхней предельной скорости Nmax вращения (ДА на этапе S25), то гибридный ЭБУ 40 на этапе S26 определяет, имеется ли запрос на остановку двигателя. Например, гибридный ЭБУ 40 определяет, что запрос на остановку двигателя имеется, если требуемая мощность Preq привода уменьшается ниже заданного значения, или если из другого ЭБУ, который не показан, поступает информация о том, что транспортное средство 1 сталкивается с другим объектом, или в случае сбоя в работе другой системы.
[0057] Если запрос на остановку двигателя отсутствует (НЕТ на этапе S26), то гибридный ЭБУ 40 на этапе S21 управляет мощностью привода (первый ДГ 200 и второй ДГ 400) при предварительном условии, что двигатель 100 управляется посредством фиксированного управления.
[0058] При наличии запроса на остановку двигателя (ДА на этапе S26), на этапе S27 гибридный ЭБУ 40 управляет крутящим моментом Tm1 первого ДГ таким образом, что скорость Ne вращения двигателя становится ниже нижней предельной скорости Nmin вращения (=Nfix-α), или таким образом, что скорость Ne двигателя превышает верхнюю предельную скорость Nmax вращения (=Nfix+α). Гибридный ЭБУ 40 увеличивает величину (абсолютное значение) крутящего момента Tm1 первого ДГ в отрицательном направлении для уменьшения скорости Ne вращения двигателя, чтобы сделать ее ниже нижней предельной скорости Nmin вращения. В то же время, гибридный ЭБУ 40 увеличивает величину (абсолютное значение) крутящего момента Tm1 первого ДГ в положительном направлении для увеличения скорости Ne вращения двигателя, чтобы сделать ее выше верхней предельной скорости Nmax вращения. В дальнейшем, крутящий момент Tm1 первого ДГ, который управляется при обработке данных на этапе S27 так, чтобы довести скорость Ne вращения двигателя до величины, которая ниже нижней предельной скорости Nmin вращения, также упоминается как «крутящий момент понижения Ne». Кроме того, крутящий момент Tm1 первого ДГ, который управляется при обработке данных на этапе S27 так, чтобы довести скорость Ne вращения двигателя до величины, которая выше верхней предельной скорости Nmax вращения, также упоминается как «крутящий момент повышения Ne».
[0059] С другой стороны, если скорость Ne вращения двигателя не находится в диапазоне от нижней предельной скорости Nmin вращения до верхней предельной скорости Nmax вращения (НЕТ на S25), то гибридный ЭБУ 40 определяет на этапе S28, равна ли скорость Ne вращения двигателя 0 (находится ли двигатель 100 в остановленном состоянии). Если скорость Ne вращения двигателя не равна 0 (НЕТ на S28), то гибридный ЭБУ 40 завершает процесс обработки данных.
[0060] Если скорость Ne вращения двигателя равна 0 (ДА в S28), то гибридный ЭБУ 40 на этапе S29 определяет, есть ли запрос на запуск двигателя. Например, гибридный ЭБУ 40 определяет, что запрос на запуск двигателя имеется, если требуемая мощность Preq привода увеличивается до заданного значения или больше. Если запрос на запуск двигателя отсутствует (НЕТ на этапе S29), то гибридный ЭБУ 40 завершает процесс обработки данных.
[0061] Если запрос на запуск двигателя присутствует (ДА на S29), то гибридный ЭБУ 40 управляет крутящим моментом Tm1 первого ДГ на этапе S30 таким образом, что скорость Ne вращения двигателя превышает нижнюю предельную скорость Nmin вращения (=Nfix-α). В дальнейшем, крутящий момент Tm1 первого ДГ, который управляется при обработке данных на этапе S30 таким образом, чтобы довести скорость Ne вращения двигателя до нижней предельной скорости Nmin вращения или выше, также упоминается как «запускающий момент».
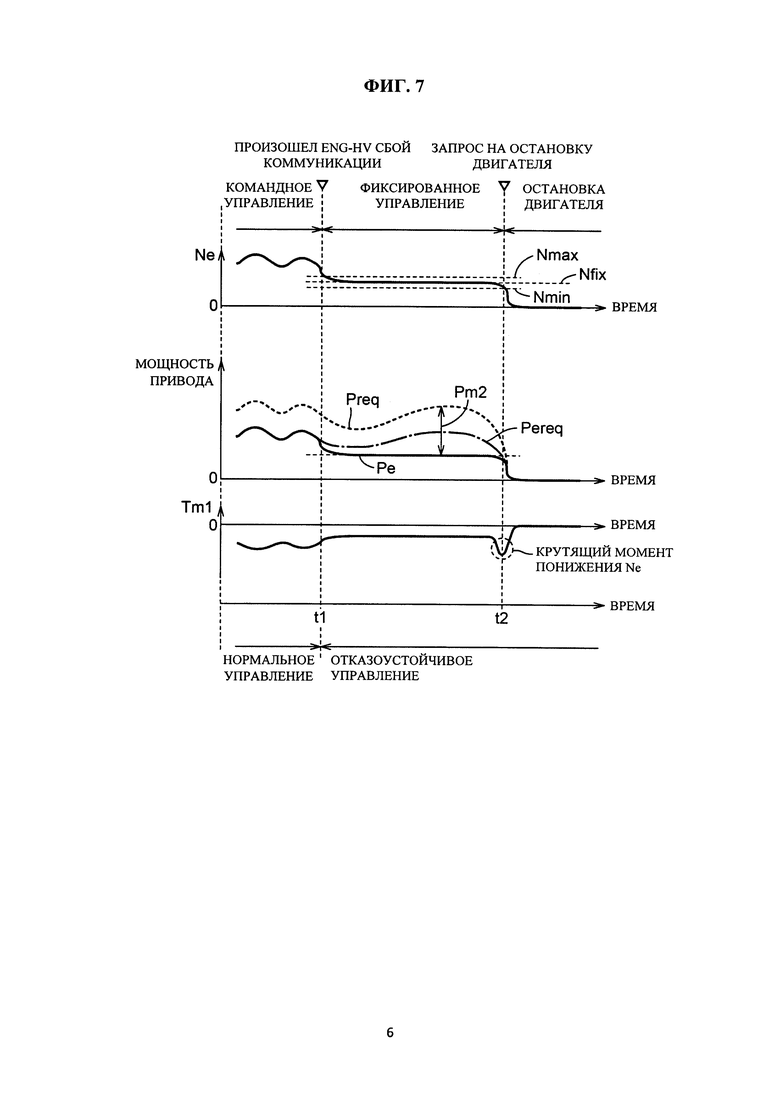
[0062] На фиг. 7 изображен график одного примера, который показывает изменения в скорости Ne вращения двигателя, мощности привода и крутящего момента Tm1 первого ДГ, когда происходит ENG-HV сбой коммуникации.
[0063] В период до момента времени t1, ENG-HV сбоя коммуникации не происходит, и выполняется нормальный режим работы. То есть ЭБУ 30 двигателя выполняет «командное управление», в котором двигатель 100 работает таким образом, что рабочая точка двигателя становится равной управляющей рабочей точке, которая является следствием сигнала управления двигателем, принятого от гибридного ЭБУ 40. Гибридный ЭБУ 40 управляет первым ДГ 200 и вторым ДГ 400 так, чтобы удовлетворить требуемую мощность Preq привода при предварительном условии, что двигатель 100 управляется посредством командного управления.
[0064] Когда ENG-HV сбой коммуникации происходит в момент времени t1, нормальный режим работы переключается на отказоустойчивое управление. То есть ЭБУ 30 двигателя выполняет «фиксированное управление», в котором двигатель 100 работает так, что рабочая точка двигателя становится равной фиксированной рабочей точке (фиксированная скорость Nfix вращения и фиксированный крутящий момент Tfix). Таким образом, в примере, показанном на фиг. 7, мощность Ре двигателя имеет более низкое значение, чем требуемая мощность Pereq двигателя (см. штрихпунктирная линия на фиг. 7).
[0065] Гибридный ЭБУ 40 управляет первым ДГ 200 и вторым ДГ 400, чтобы удовлетворить требуемую мощность Preq привода при предварительном условии, что двигатель 100 управляется посредством фиксированного управления. В примере, показанном на фиг. 7, мощность Ре двигателя недостаточно высока для требуемой мощности Pereq двигателя в связи с режимом управления двигателя 100 посредством фиксированного управления. Таким образом, недостающая величина добавляется к мощности Pm2 второго ДГ. В результате, даже когда происходит ENG-HV сбой коммуникации, транспортное средство 1 может быть эвакуировано своим ходом, до тех пор, пока удовлетворяется требуемая мощность Preq привода.
[0066] Когда получен запрос на остановку двигателя в момент времени t2 в связи с уменьшением величины требуемой мощности Preq привода, например, гибридный ЭБУ 40 побуждает первый ДГ 200 генерировать крутящий момент понижения Ne. Более конкретно, как показано на фиг. 7, гибридный ЭБУ 40 увеличивает крутящий момент Tm1 первого ДГ в отрицательном направлении. Таким образом, когда скорость Ne вращения двигателя становится ниже нижней предельной скорости Nmin вращения, ЭБУ 30 двигателя останавливает двигатель 100. В результате, даже когда имеет место ENG-HV сбой коммуникации, гибридный ЭБУ 40 побуждает первый ДГ 200 генерировать крутящий момент понижения Ne, и, таким образом, двигатель 100 опосредовано может быть остановлен.
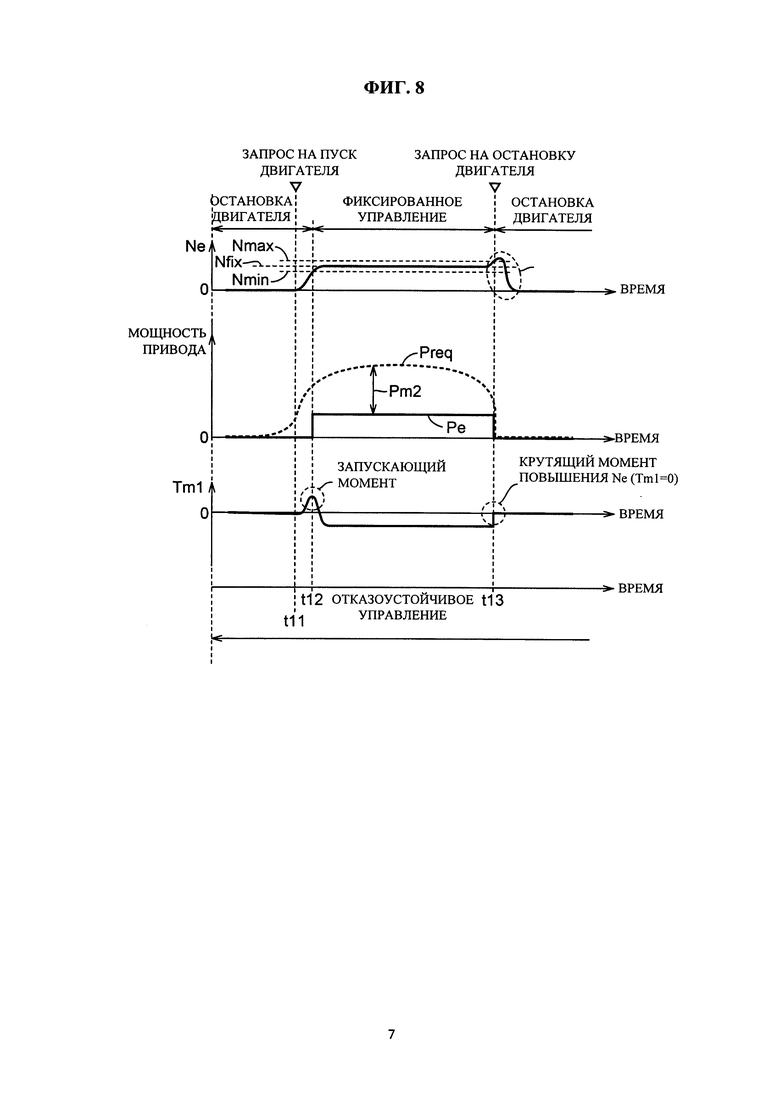
[0067] На фиг. 8 представлена схема одного примера, который показывает изменения в скорости Ne вращения двигателя, мощности привода и кутящего момента Tm1 первого ДГ, когда двигатель 100 запускается или останавливается во время отказоустойчивого управления из-за ENG-HV сбоя коммуникации.
[0068] В период до момента времени t11 выполняется безаварийный отказоустойчивое управление. Тем не менее, величина требуемой мощности Preq привода является низкой, и двигатель 100 остановлен.
[0069] Когда запрос на запуск двигателя подается в момент времени t11 в связи с увеличением требуемой мощности Preq привода, гибридный ЭБУ 40 побуждает первый ДГ 200 генерировать запускающий момент. Таким образом, когда скорость Ne вращения двигателя превышает нижнюю предельную скорость Nmin вращения, ЭБУ 30 двигателя запускает двигатель 100 и выполняет фиксированное управление. В результате, даже когда происходит ENG-HV сбой коммуникации, гибридный ЭБУ 40 побуждает первый ДГ 200 генерировать запускающий момент, и, таким образом, двигатель 100 опосредовано может быть запущен.
[0070] Когда получен запрос на остановку двигателя в момент t13, например, из-за возникновения сбоя другой системы управления, гибридный ЭБУ 40 побуждает первый MG 200 генерировать крутящий момент повышения Ne. Более конкретно, как показано на фиг. 7, гибридный ЭБУ 40 изменяет крутящий момент Tm1 первого ДГ от отрицательного значения до 0. В это время, крутящий момент Tm1 первого ДГ может стать равным 0, когда гибридный ЭБУ 40 отключает инвертор в БУЭ 600, который управляет первым ДГ 200.
[0071] Когда крутящий момент Tm1 первого ДГ становится равным 0, то силы реакции для крутящего момента Те двигателя больше не существует, и скорость Ne вращения двигателя увеличивается вследствие действия крутящего момента Те двигателя. Таким образом, когда скорость Ne вращения двигателя превышает верхнюю предельную скорость Nmax вращения, ЭБУ 30 двигателя останавливает двигатель 100. В результате, даже когда имеет место ENG-HV сбой коммуникации, гибридный ЭБУ 40 управляет первым ДГ 200 для генерирования крутящего момента повышения Ne, и тем самым двигатель 100 опосредовано может быть остановлен.
[0072] Как было описано выше, в случае, когда происходит сбой коммуникации с гибридным ЭБУ 40, и скорость Ne вращения двигателя отклоняется от верхней фиксированной скорости Nfix вращения на заданную величину α или больше, ЭБУ 30 двигателя не выполняет фиксированное управление, но останавливает двигатель 100. Таким образом, когда происходит ENG-HV сбой коммуникации, не только двигатель 100 может управляться посредством фиксированного управления, но также двигатель 100 может быть остановлен.
[0073] Более того, в случае, когда происходит сбой коммуникации с ЭБУ 30 двигателя и имеется запрос на остановку двигателя, гибридный ЭБУ 40 управляет первым ДГ 200 таким образом, что скорость Ne вращения двигателя отклоняется от фиксированной скорости Nfix вращения на заданную величину α или больше. Таким образом, даже когда происходит ENG-HV сбой коммуникации, гибридный ЭБУ 40 может опосредовано остановить двигатель.
[0074] Следует отметить, что двигатель 100 останавливается, когда скорость Ne вращения двигателя отклоняется от фиксированной скорости Nfix вращения на заданную величину α или больше в течение отказоустойчивого управления, тем не менее, условия остановки двигателя 100 не ограничиваются этим. Например, двигатель 100 может быть остановлен, когда крутящий момент Те двигателя отклоняется от фиксированного крутящего момента Tfix на заданную величину или больше. В качестве альтернативы, двигатель 100 может быть остановлен, когда мощность Ре двигателя отклоняется от таковой, полученной при фиксированной скорости Nfix вращения и фиксированного крутящего момента Tfix, на заданную величину или больше.
[0075] Следует отметить, что гибридный ЭБУ 40В и ДГ-ЭБУ 50 могут быть интегрированы в один ЭБУ 40А, как показано на фиг. 9. На фиг. 9 ЭБУ 40А является одним из примеров «второго электронного блока управления». В этом случае, ДГ-ЭБУ 50 принимает скорость Nm1 вращения первого ДГ и скорость Nm2 вращения второго ДГ от решающего устройства 21 и решающего устройства 22 соответственно. Гибридный ЭБУ 40В соединен с ЭБУ 30 двигателя и ДГ-ЭБУ 50 по коммуникационным линиям, соответственно, и взаимно обменивается данными с ЭБУ 30 двигателя и ДГ-ЭБУ 50 для общего управления двигателем 100, первым ДГ 200 и вторым ДГ 400. Гибридный ЭБУ 40В выдает сигнал управления двигателем в ЭБУ 30 двигателя и выдает сигнал управления первым ДГ и сигнал управления вторым ДГ в ДГ-ЭБУ 50. Гибридный ЭБУ 40В также получает информацию, указывающую на состояние двигателя 100 от ЭБУ 30 двигателя, и получает информацию, указывающую на состояния первого ДГ 200 и второго ДГ 400 от ДГ-ЭБУ 50. ДГ-ЭБУ 50 передает информацию, указывающую на состояния первого ДГ 200 и второго ДГ 400 (например, скорость Nm1 вращения первого ДГ и скорость Nm2 вращения второго ДГ, соответственно, определяемую решающими устройствами 21, 22 и т.п.), на гибридный ЭБУ 40В. Кроме того, ДГ-ЭБУ 50 управляет выдачей выходного сигнала на первый ДГ 200 и второй ДГ 400 (более конкретно, величиной возбуждения и т.п.), в соответствии с сигналом управления первым ДГ и сигналом управления вторым ДГ, поступающими из гибридного ЭБУ 40В.
[0076] Вариант осуществления, который был описан здесь, является иллюстративным во всех аспектах и, таким образом, не следует рассматривать его как ограничивающий. Объем настоящего изобретения не определяется вышеизложенным описанием, но определяется формулой изобретения, и подразумевается включающим все изменения, которые имеют эквивалентные значения и находятся в пределах эквивалентного объема формулы изобретения.
[0077] Ниже представлена сущность осуществления. Гибридное транспортное средство включает в себя ЭБУ двигателя для управления двигателем и гибридный ЭБУ для управления двигателями-генераторами и выдачи сигнала управления двигателем в ЭБУ двигателя. Когда отсутствует сбой коммуникации с гибридным ЭБУ, ЭБУ двигателя управляет двигателем таким образом, что рабочая точка двигателя (скорость вращения и крутящий момент) становится равной управляющей рабочей точке, которая является следствием сигнала управления двигателем, принятого из гибридного ЭБУ. С другой стороны, когда происходит сбой коммуникации с гибридным ЭБУ, ЭБУ двигателя выполняет фиксированное управление, при котором двигатель управляется таким образом, что рабочая точка двигателя (скорость вращения и крутящий момент) становится заранее определенной фиксированной рабочей точкой.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИБРИДНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2016 |
|
RU2643079C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2606158C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2016 |
|
RU2640164C1 |
| ГИБРИДНОЕ ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ УПРАВЛЕНИЯ ДЛЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2662378C1 |
| ГИБРИДНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2016 |
|
RU2644833C1 |
| УСТРОЙСТВО ВЫВОДА МОЩНОСТИ, ТРАНСПОРТНОЕ СРЕДСТВО, ОБОРУДОВАННОЕ УСТРОЙСТВОМ ВЫВОДА МОЩНОСТИ, И СПОСОБ УПРАВЛЕНИЯ УСТРОЙСТВОМ ВЫВОДА МОЩНОСТИ | 2006 |
|
RU2364739C1 |
| УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ ПОДАЧЕЙ ЭЛЕКТРИЧЕСКОЙ МОЩНОСТИ ДЛЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2007 |
|
RU2397089C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2007 |
|
RU2418699C1 |
| СИСТЕМА ПРИВОДА ДЛЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2016 |
|
RU2629815C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ УСТРОЙСТВА ПЕРЕДАЧИ ДИНАМИЧЕСКОЙ МОЩНОСТИ | 2016 |
|
RU2625813C1 |
Изобретение относится к гибридным транспортным средствам. Система управления гибридным транспортным средством содержит первый и второй электронные блоки управления двигателем и электрической роторной машиной соответственно. Второй блок управления выдает сигнал управления двигателем в первый блок управления посредством коммуникации с первым блоком управления. Первый блок управления управляет двигателем в соответствии с сигналом управления двигателем, принятым из второго блока управления, при отсутствии сбоя коммуникации со вторым блоком управления. Первый блок управляет фиксированным функционированием, при котором двигатель управляется так, что одна величина из скорости вращения, выходной мощности и выходного крутящего момента становится равной фиксированному значению, когда произошел сбой коммуникации со вторым блоком управления. Обеспечивается перемещение транспортного средства при сбое между блоками управления. 3 з.п. ф-лы, 9 ил.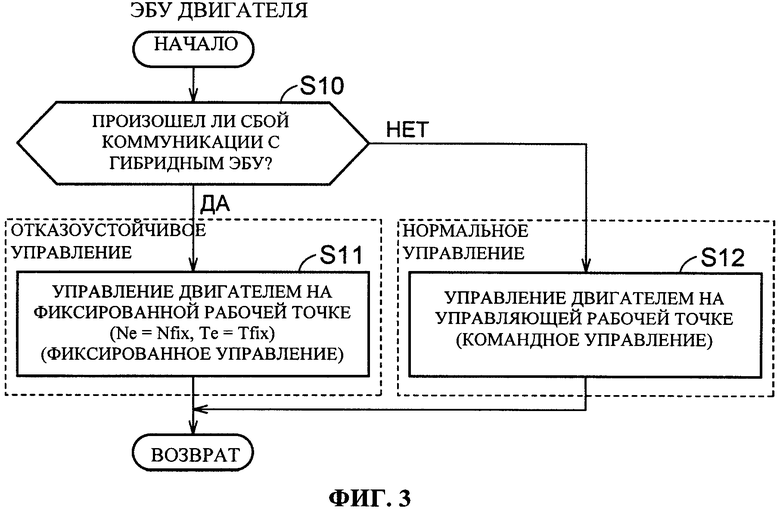
1. Система управления гибридным транспортным средством, причем гибридное транспортное средство выполнено с возможностью двигаться, используя мощность по меньшей мере одного из двигателя и роторной электрической машины, при этом система управления содержит:
первый электронный блок управления, выполненный с возможностью управлять двигателем; и
второй электронный блок управления, выполненный с возможностью управлять роторной электрической машиной, причем второй электронный блок управления выполнен с возможностью выдавать сигнал управления двигателем в первый блок электронного управления посредством коммуникации с первым электронным блоком управления, и первый электронный блок управления выполнен с возможностью:
a) управлять двигателем в соответствии с сигналом управления двигателем, принятым из второго электронного блока управления, при отсутствии сбоя коммуникации со вторым электронным блоком управления; и
b) выполнять управление фиксированным функционированием, при котором двигатель управляется таким образом, что по меньшей мере одна величина из скорости вращения, выходной мощности и выходного крутящего момента двигателя становится равной соответствующему фиксированному значению, когда произошел сбой коммуникации со вторым электронным блоком управления.
2. Система управления по п. 1, в которой
второй электронный блок управления выполнен с возможностью управлять роторной электрической машиной таким образом, чтобы передавать требуемую мощность привода, запрошенную пользователем, на ведущее колесо при предварительном условии, что двигатель управляется в соответствии с сигналом управления двигателем при отсутствии сбоя коммуникации с первым электронным блоком управления, и
второй электронный блок управления выполнен с возможностью управлять роторной электрической машиной таким образом, чтобы передавать требуемую мощность привода на ведущее колесо при предварительном условии, что двигатель управляется посредством выполнения управления фиксированным функционированием, когда произошел сбой коммуникации с первым электронным блоком управления.
3. Система управления по п. 1, в которой
первый электронный блок управления выполнен с возможностью останавливать двигатель без выполнения управления фиксированным функционированием в случае, когда произошел сбой коммуникации со вторым электронным блоком управления и по меньшей мере одна величина из скорости вращения, выходной мощности и выходного крутящего момента двигателя отклоняется от соответствующего фиксированного значения на заданную величину или больше.
4. Система управления по п. 1, в которой
двигатель механически соединен с роторной электрической машиной,
первый электронный блок управления выдает запрос на остановку, чтобы остановить двигатель без выполнения управления фиксированным функционированием в случае, когда произошел сбой коммуникации со вторым электронным блоком управления, и скорость вращения двигателя отклоняется от фиксированного значения на заданную величину или больше, и
второй электронный блок управления выполнен с возможностью управлять роторной электрической машиной таким образом, чтобы скорость вращения двигателя отклонялась от фиксированного значения на заданную величину или больше в случае, когда произошел сбой коммуникации с первым электронным блоком управления, и имеется запрос на остановку.
| JP 2014231244 A, 11.12.2014 | |||
| US 2007112483 A1, 17.05.2007 | |||
| US 2012095630 A1, 19.04.2012 | |||
| JP 2002285905 A, 03.10.2002 | |||
| US 2007102206 A1, 10.05.2007 | |||
| CN 103818377 A, 28.05.2014. |

