Предпосылки создания изобретения
1. Область техники, к которой относится изобретение
[0001] Изобретение относится к гибридному транспортному средству и способу управления для гибридного транспортного средства.
2. Описание предшествующего уровня техники
[0002] Обычно предлагается гибридное транспортное средство, в котором три вращающихся элемента планетарного зубчатого механизма соответственно соединены с двигателем, первым электродвигателем, и вторым электродвигателем, в котором вращающийся элемент, с которым соединен второй электродвигатель, соединен с приводным валом через ступенчатую трансмиссию, и в котором ведущий вал соединен с колесами (например, см. публикацию японской патентной заявки №2014-144659 (JP 2014-144659 А)). Движение гибридного транспортного средства обычно управляется следующим образом. Сначала требуемый приводной момент устанавливается водителем на основе величины работы педали акселератора и скорости транспортного средства. Требуемая мощность, которая должна выдаваться из двигателя, вычисляется путем умножения требуемого приводного момента на скорость вращения приводного вала. Далее целевая скорость вращения двигателя устанавливается на основе требуемой мощности и рабочей линии двигателя, на которой расход топлива становится оптимальным (оптимальная рабочая линия расхода топлива). Далее, двигатель, первый электродвигатель, второй электродвигатель и ступенчатая трансмиссия управляются так, чтобы обеспечить движение в то время, когда двигатель вращается на целевой скорости вращения для выдачи требуемой мощности, и требуемая приводная мощность подается на приводной вал.
Сущность изобретения
[0003] Рабочая точка двигателя может свободно устанавливаться в вышеописанном гибридном транспортном средстве независимо от ступени передачи ступенчатой трансмиссии. По этой причине, имеется случай, когда изменение скорости вращения двигателя не соответствует изменению скорости транспортного средства. Когда водитель выжимает педаль акселератора, требуемая мощность от двигателя увеличивается. Соответственно, скорость вращения двигателя быстро возрастает, однако, скорость транспортного средства так быстро не растет. Таким образом, до увеличения скорости транспортного средства быстро возрастает только скорость вращения двигателя. У водителя обычно ожидает такое ощущение при управлении, что скорость вращения двигателя увеличивается вместе с увеличением скорости транспортного средства. Таким образом, когда только скорость вращения двигателя быстро возрастает до увеличения скорости транспортного средства, у водителя возникает чувство дискомфорта в отношении его/ее ощущений при управлении. При этом также возможен случай, когда скорость вращения двигателя не меняется, даже когда изменяется ступень передачи ступенчатой трансмиссии. Когда водитель выжимает педаль акселератора, и скорость транспортного средства увеличивается, ступенчатая трансмиссия вместе с этим переключается на верхнюю передачу. Однако когда требуемая мощность от двигателя не меняется до и после переключения на высшую передачу, двигатель работает, в то время, как скорость вращения двигателя остается той же самой. У водителя, как правило, возникает такое ощущение при смене передачи, что скорость вращения двигателя уменьшается при переключении на более высокую передачу ступенчатой трансмиссии. В этом случае водитель испытывает чувство дискомфорта, потому что водитель не желает воспринимать такое ощущение смены передачи. Проблема, как описано выше, также применима к случаю, когда ступень передачи переключается виртуально в гибридном транспортном средстве того типа, который не включает в себя ступенчатую трансмиссию.
[0004] Изобретением предложено гибридное транспортное средство и способ управления для гибридного транспортного средства, способные создать водителю дополнительное предпочтительное ощущение при управлении.
[0005] Первый объект изобретения представляет собой гибридное транспортное средство. Гибридное транспортное средство включает в себя двигатель, первый электродвигатель, приводной вал, планетарный зубчатый механизм, второй электродвигатель, аккумулятор, электронный блок управления. Приводной вал соединен с осью. Планетарный зубчатый механизм включает в себя три вращающихся элемента, при этом три вращающихся элемента соответственно соединены с тремя валами: выходным валом двигателя, вращающимся валом первого электродвигателя, и приводным валом. Второй электродвигатель выполнен с возможностью подачи мощности на приводной вал и съема мощности с приводного вала. Аккумулятор приспособлен для подачи электроэнергии на первый электродвигатель и второй электродвигатель. Электронный блок управления выполнен с возможностью установки приводного момента, который подается на приводной вал, осуществляемой на основе величины работы педали акселератора, задаваемой водителем, и скорости транспортного средства, в качестве требуемого приводного момента. При этом электронный блок управления выполнен с возможностью управления двигателем, первым электродвигателем, и вторым электродвигателем так, чтобы осуществлять движение с использованием требуемого приводного момента. Кроме того, электронный блок управления выполнен с возможностью установки скорости вращения для ощущения управления, при этом скорость вращения для ощущения управления является скоростью вращения двигателя, основанной на величине работы педали акселератора, скорости транспортного средства и ступени передачи. При этом электронный блок управления выполнен с возможностью установки верхней предельной мощности двигателя, причем верхняя предельная мощность представляет собой максимальную мощность, которая выдается из двигателя, когда двигатель работает на скорости вращения для ощущения управления. При этом электронный блок управления выполнен с возможностью установки верхнего предельного приводного момента приводного вала, причем верхний предельный приводной момент представляет собой приводной момент, когда верхняя предельная мощность подается на приводной вал. При этом электронный блок управления выполнен с возможностью установки целевой мощность двигателя, причем целевая мощность двигателя представляет собой мощность для выдачи либо первой мощности, либо второй мощности на приводной вал. Первая мощность соответствует меньшему из верхнего предельного приводного момента и требуемого приводного момента. Вторая мощность является меньшей из третьей мощности и четвертой мощности. Третья мощность представляет собой мощность для выдачи верхнего предельного приводного момента на приводной вал. Четвертая мощность представляет собой мощность для выдачи требуемого приводного момента на приводной вал. Электронный блок управления выполнен с возможностью управления двигателем, первым электродвигателем и вторым электродвигателем таким образом, что целевая мощность двигателя выдается из двигателя.
[0006] В данной конфигурации электронный блок управления устанавливает целевую мощность двигателя, которая соответствует ступени передачи, и управляет двигателем, первым электродвигателем, и вторым электродвигателем таким образом, что целевая мощность двигателя выдается из двигателя. Соответственно, даже когда водитель выжимает педаль акселератора, может быть установлена скорость вращения двигателя, которая соответствуют скорости транспортного средства, и, таким образом, водитель может испытывать дополнительное предпочтительное ощущение при управлении по сравнению со случаем, когда скорость вращения двигателя быстро возрастает перед увеличением скорости транспортного средства. Кроме того, когда ступень передачи меняется (переключается), целевая мощность двигателя, которая соответствует ступени передачи, меняется. Таким образом, водитель может испытывать ощущение смены передачи. В результате этого, водитель может испытывать дополнительное благоприятное ощущение при управлении.
[0007] В гибридном транспортном средстве электронный блок управления может управлять двигателем, первым электродвигателем, и вторым электродвигателем таким образом, что первая мощность подается на приводной вал. Таким образом, гибридное транспортное средство может двигаться, при этом приводной момент, который соответствует целевой мощности двигателя, подается на приводной вал.
[0008] В гибридном транспортном средстве электронный блок управления может устанавливать целевую скорость вращения двигателя, при этом целевая скорость вращения устанавливается как скорость вращения для ощущения управления. Электронный блок управления может управлять двигателем, функционирующим на целевой скорости вращения. Таким образом, двигатель может работать на скорости вращения для ощущения управления, при этом учитывается ступень передачи.
[0009] В гибридном транспортном средстве электронный блок управления может устанавливать наименьшую из оптимальной скорости вращения двигателя для топливной экономичности и скорости вращения для ощущения управления в качестве целевой скорости вращения двигателя, когда ступень передачи равна или выше порога, и управлять двигателем для обеспечения его работы на целевой скорости вращения. Заметим, что оптимальная скорость вращения двигателя для топливной экономичности представляют собой скорость вращения, на которой выдается пятая мощность от двигателя, обеспечивающая оптимальную топливную экономичность, причем пятая мощность является мощностью, основанной на требуемом приводном моменте и скорости транспортного средства. То есть, когда ступень передачи равна или выше порога, оптимальная скорость вращения двигателя для топливной экономичности ограничена скоростью вращения для ощущения управления, для которой учитывается ступень передачи. При этом в качестве порога может использоваться высшая ступень передачи, а также ступень передачи меньшая, чем высшая ступень передачи, например, ступень передачи, которая ниже на одну ступень, либо ступень передачи, которая ниже на две ступени, и т.п. В случае, если гибридное транспортное средство движется с относительно высокой скоростью транспортного средства, и ступень передачи является высокой ступенью передачи, соответствующей порогу или выше, например, высшей ступенью передачи, то для движения не требуется относительно высокая мощность. Таким образом, оптимальная скорость вращения двигателя для топливной экономичности может стать ниже скорости вращения для ощущения управления. В этом случае оптимальная скорость вращения двигателя для топливной экономичности устанавливается в качестве целевой скорости вращения. Таким образом, топливная экономичность может принимать желаемую величину. С другой стороны, когда оптимальная скорость вращения двигателя для топливной экономичности становится выше скорости вращения для ощущения управления, тогда скорость вращения для ощущения управления устанавливается в качестве целевой скорости вращения. Таким образом, двигатель может работать на скорости вращения, которая соответствуют ступени передачи. Следовательно, можно избежать работы двигателя на такой высокой скорости вращения, что у водителя возникает чувство дискомфорта, и при этом учитывать топливную экономичность.
[0010] В гибридном транспортном средстве электронный блок управления может устанавливать мощность, которую получают путем сложения требуемой мощности зарядки и разрядки с максимальной мощностью, в качестве верхней предельной мощности, когда требуется требуемая мощность зарядки и разрядки. Кроме того, электронный блок управления в качестве целевой мощности двигателя может устанавливать мощность, которую получают путем вычитания требуемой мощности зарядки и разрядки из верхней предельной мощности, когда целевая мощность двигателя устанавливается таким образом, что верхний предельный приводной момент подается на приводной вал, и требуется требуемая мощность зарядки и разрядки. Кроме того, электронный блок управления в качестве целевой мощности двигателя, может устанавливать мощность, которую получают путем вычитания требуемой мощности зарядки и разрядки из мощности для выдачи требуемого приводного момента на приводной вал, когда целевая мощность двигателя устанавливается таким образом, что требуемый приводной момент подается на приводной вал, и требуется требуемая мощность зарядки и разрядки. Отметим, что требуемая мощность зарядки и разрядки является мощностью зарядки и разрядки аккумулятора, а также является мощностью, которая имеет отрицательную величину на стороне зарядки. Таким образом, можно предотвратить возрастание скорости вращения двигателя при зарядке и разрядке аккумулятора.
[0011] В гибридном транспортном средстве электронный блок управления может устанавливать приводной момент в то время, когда мощность, которую получают путем сложения требуемой мощности зарядки и разрядки с верхней предельной мощностью, подается на приводной вал в качестве соответствующей верхнему предельному приводному моменту, когда нужна требуемая мощность зарядки и разрядки. Кроме того, электронный блок управления может устанавливать мощность, которую получают путем вычитания требуемой мощности зарядки и разрядки из мощности для выдачи требуемого приводного момента на приводной вал, в качестве целевой мощности двигателя, когда целевая мощность двигателя устанавливается таким образом, что требуемый приводной момент подается на приводной вал, и когда нужна требуемая мощность зарядки и разрядки. Отметим, что требуемая мощность зарядки и разрядки является мощностью зарядки и разрядки аккумулятора, а также является мощностью, которая имеет отрицательную величину на стороне зарядки. Таким образом, можно предотвратить возрастание скорости вращения двигателя на основе зарядки и разрядки аккумулятора.
[0012] Гибридное транспортное средство может включать в себя режим переключения переключателя, приспособленный для выдачи команд по выбору режима приоритета ощущения управления, в котором ощущение управления является приоритетным над топливной экономичностью. Электронный блок управления выполнен с возможностью установки мощности двигателя для выдачи требуемого приводного момента на приводной вал, в качестве целевой мощности двигателя, когда режим приоритета ощущения управления не выбран режимом переключения переключателя. Кроме того, электронный блок управления может управлять двигателем таким образом, что двигатель работает на оптимальной скорости вращения двигателя для топливной экономичности, и целевая мощность двигателя выдается из двигателя. Оптимальная скорость вращения двигателя для топливной экономичности представляет собой скорость вращения двигателя, при которой целевая мощность двигателя, обеспечивающая оптимальную топливную экономичность, выдается из двигателя. Таким образом, когда выбран режим приоритета ощущения управления, гибридное транспортное средство может двигаться, в то время как водитель испытывает дополнительное благоприятное ощущение при управлении. Когда режим приоритета ощущения управления не выбран, гибридное транспортное средство может двигаться, и при этом обеспечивается дополнительная предпочтительная топливная экономичность.
[0013] В гибридном транспортном средстве ступень передачи может представлять собой виртуальную ступень передачи, которая устанавливается на основе величины работы педали акселератора, задаваемой водителем, а также скорости транспортного средства. Кроме того, гибридное транспортное средство может включать в себя ступенчатую трансмиссию, которая установлена между приводным валом и планетарным зубчатым механизмом, при этом ступень передачи является либо ступенью передачи ступенчатой трансмиссии, либо ступенью передачи, которую получают путем сложения виртуальной ступени передачи, установленной на основе величины работы педали акселератора, задаваемой водителем, и скорости транспортного средства, со ступенью передачи ступенчатой трансмиссии. При этом «ступень передачи, которую получают путем сложения виртуальной ступени передачи со ступенью передачи ступенчатой трансмиссии», означает ступень передачи, которую получают путем сочетания ступени передачи ступенчатой трансмиссии и виртуальной ступени передачи. Например, обеспечивается суммарное значение из четырех ступеней передачи, когда две виртуальные ступени передачи соответственно суммируются с каждой из двух ступеней передачи ступенчатой трансмиссии. Суммарное значение из восьми ступеней передачи обеспечивается тогда, когда две виртуальные ступени передачи соответственно суммируются с каждой из четырех ступеней передачи ступенчатой трансмиссии. Таким образом, может быть использовано нужное число ступеней передачи.
[0014] Второй объект изобретения представляет собой способ управления для гибридного транспортного средства. Гибридное транспортное средство включает в себя двигатель, первый электродвигатель, приводной вал, планетарный зубчатый механизм, второй электродвигатель, аккумулятор, электронный блок управления. Приводной вал соединен с осью. Планетарный зубчатый механизм включает в себя три вращающихся элемента, при этом три вращающихся элемента соответственно соединены с тремя валами: выходным валом двигателя, вращающимся валом первого электродвигателя, и приводным валом. Второй электродвигатель выполнен с возможностью подачи мощности на приводной вал и съема мощности с приводного вала. Аккумулятор приспособлен для подачи электроэнергии на первый электродвигатель и второй электродвигатель. Способ управления включает в себя: установку электронным блоком управления приводного момента, который подается на приводной вал, на основе величины работы педали акселератора, задаваемой водителем, и скорости транспортного средства в качестве требуемого приводного момента; осуществляемое электронным блоком управления управление двигателем, первым электродвигателем и вторым электродвигателем таким образом, чтобы осуществлять движение с использованием требуемого приводного момента; установку электронным блоком управления скорости вращения для ощущения управления, при этом скорость вращения для ощущения управления является скоростью вращения двигателя, основанной на величине работы педали акселератора, скорости транспортного средства и ступени передачи; установку электронным блоком управления верхней предельной мощности двигателя, при этом верхняя предельная мощность является максимальной мощностью, которая выдается из двигателя, когда двигатель работает на скорости вращения для ощущения управления; установку электронным блоком управления верхнего предельного приводного момента приводного вала, причем верхний предельный приводной момент представляет собой приводной момент, когда верхняя предельная мощность подается на приводной вал; установку электронным блоком управления целевой мощности двигателя, причем целевая мощность двигателя представляет собой мощность для выдачи либо первой мощности, либо второй мощности на приводной вал, причем первая мощность соответствует меньшему из верхнего предельного приводного момента и требуемого приводного момента, причем вторая мощность является меньшей из третьей мощности и четвертой мощности, при этом третья мощность представляет собой мощность для выдачи верхнего предельного приводного момента на приводной вал, а четвертая мощность представляет собой мощность для выдачи требуемого приводного момента на приводной вал; осуществляемое электронным блоком управления управление двигателем, первым электродвигателем и вторым электродвигателем таким образом, что целевая мощность двигателя выдается из двигателя.
[0015] В данной конфигурации электронный блок управления устанавливает целевую мощность двигателя, которая соответствует ступени передачи, и управляет двигателем, первым электродвигателем, и вторым электродвигателем таким образом, что целевая мощность двигателя выдается из двигателя. Соответственно, даже когда водитель выжимает педаль акселератора, может быть установлена скорость вращения двигателя, которая соответствуют скорости транспортного средства, и, таким образом, водитель может испытывать дополнительное благоприятное ощущение при управлении по сравнению со случаем, когда скорость вращения двигателя быстро возрастает до увеличения скорости транспортного средства. Кроме того, когда ступень передачи меняется (переключается), целевая мощность двигателя, которая соответствует ступени передачи, меняется. Таким образом, водитель может испытывать ощущение смены передачи. В результате этого, водитель может испытывать дополнительное благоприятное ощущение при управлении.
Краткое описание чертежей
[0016] Признаки, преимущества, а также техническая и промышленная значимость примерных вариантов осуществления изобретения будут описаны ниже со ссылкой на прилагаемые чертежи, на которых одинаковые ссылочные позиции обозначают одинаковые элементы, и на которых:
Фиг. 1 представляет собой схему конфигурации, на которой схематически показана конфигурация гибридного транспортного средства 20 в первом примере осуществления;
Фиг. 2 представляет собой блок-схему одного примера программы управления режимом приоритета ощущения управления, которая выполняется ГТЭБУ 70 во время положения D в режиме приоритета ощущения управления;
Фиг. 3 представляет собой пояснительную схему, на которой показан пример карты установки требуемой приводного момента от акселератора;
Фиг. 4 представляет собой пояснительную схему, на которой показан пример карты установки требуемой мощности зарядки/разрядки;
Фиг. 5 представляет собой пояснительную схему, на которой показан пример карты установки оптимальной скорости вращения двигателя для топливной экономичности;
Фиг. 6 представляет собой пояснительную схему, на которой показан пример схемы изменения передачи;
Фиг. 7 представляет собой пояснительную схему, на которой показан пример карты установки целевой скорости вращения двигателя для ощущения управления;
Фиг. 8 представляет собой пояснительную схему, на которой показан пример карты установки верхней предельной мощности двигателя;
Фиг. 9 представляет собой пояснительную схему, на которой показан пример соотношения между коэффициентом ka коррекции атмосферного давления и атмосферным давлением Ра;
Фиг. 10 представляет собой блок-схему программы управления режимом приоритета ощущения управления в модифицированном примере;
Фиг. 11 представляет собой блок-схему примера программы управления режимом приоритета ощущения управления, которая выполняется ГТЭБУ 70 во время положения М;
Фиг. 12 представляет собой схему конфигурации, на которой схематически показана конфигурация гибридного транспортного средства 120 второго примера осуществления;
Фиг. 13 представляет собой пояснительную схему, на которой показан пример схемы изменения передачи, которая используется во втором примере осуществления;
Фиг. 14 представляет собой блок-схему примера программы управления режимом приоритета ощущения управления, которая выполняется ГТЭБУ 70 во время положения D в режиме приоритета ощущения управления во втором примере осуществления;
Фиг. 15 представляет собой блок-схему примера программы управления режимом приоритета ощущения управления, которая выполняется ГТЭБУ 70 во время положения М во втором примере осуществления.
Подробное описание вариантов осуществления
[0017] Далее представлено описание режима осуществления изобретения с использованием примеров.
[0018] Фиг. 1 представляет собой схему конфигурации, на которой схематически показана конфигурация гибридного транспортного средства 20 в первом примере изобретения. Как показано на чертеже, гибридное транспортное средство 20 первого примера включает в себя двигатель 22, планетарную передачу 30, электродвигатели ЭГ1, ЭГ2, инверторы 41, 42, аккумулятор 50, и гибридный электронный блок управления (далее именуемый «ГТЭБУ») 70.
[0019] Двигатель 22 выполнен как двигатель внутреннего сгорания, в котором используется бензин, дизельное топливо и т.п.для выдачи мощности. Работа двигателя 22 управляется электронным блоком управления 24 двигателя (далее именуемым «ЭБУ двигателя»).
[0020] Хотя это и не показано, ЭБУ 24 двигателя выполнен как микропроцессор, который имеет ЦП в качестве центрального компонента, и включает в себя ПЗУ, которая хранит программу обработки, ОЗУ, которое временно хранит данные, входные/выходные порты и коммуникационный порт в дополнение к ЦП. ЭБУ 24 двигателя принимает сигналы от различных датчиков через входной порт, и эти сигналы необходимы для управления работой двигателя 22. В качестве входных сигналов ЭБУ 24 двигателя можно назвать, например, угол θcr поворота коленчатого вала от датчика 23 угла поворота коленвала, который определяет вращательное положение коленчатого вала 26 двигателя 22, степень ТН открывания дросселя от датчика положения дроссельного клапана, который определяет положение дроссельного клапана, и т.п. ЭБУ 24 двигателя выдает различные сигналы управления через выходной порт, и различные сигналы управления используются для управления работой двигателя 22. В качестве выходных сигналов ЭБУ 24 двигателя можно назвать, например, сигнал управления движением на электродвигатель дросселя, который регулирует положение дроссельного клапана, сигнал управления движением на клапан впрыска топлива, сигнал управления движением на катушку зажигания, которая интегрирована с воспламенителем, и т.п. ЭБУ 24 двигателя соединен с ГТЭБУ 70 через коммуникационный порт, управляет работой двигателя 22 с помощью сигнала управления из ГТЭБУ 70, и выдает данные по рабочему состоянию двигателя 22 на ГТЭБУ 70 по мере необходимости. ЭБУ 24 двигателя вычисляет скорость вращения коленчатого вала 26, то есть, скорость вращения Ne двигателя 22 на основе угла θcr поворота коленвала от датчика 23 угла поворота коленвала.
[0021] Планетарная передача 30 выполнена как планетарный зубчатый механизм одношестеренчатого типа. Ротор электродвигателя ЭГ1 соединен с солнечной шестерней планетарной передачи 30. Приводной вал 36, который соединен с ведущими колесами 39а, 39b через дифференциал 38, соединен с коронной шестерней планетарной передачи 30. Коленчатый вал 26 двигателя 22 соединен с водилом планетарной передачи 30 через демпфер 28.
[0022] Электродвигатель ЭГ1 выполнен, например, как синхронный электродвигатель-генератор. Как описано выше, его ротор соединен с солнечной шестерней планетарной передачи 30. Электродвигатель ЭГ2 выполнен, например, как синхронный электродвигатель-генератор. Его ротор соединен с приводным валом 36. Инверторы 41, 42 подключены к аккумулятору 50 через линии 54 электропитания. Электродвигатели ЭГ1, ЭГ2 приводятся во вращение, когда множество непоказанных на чертежах переключающих элементов инверторов 41, 42 подвергаются переключающему управлению с помощью электронного блока 40 управления электродвигателем (далее именуемого «ЭБУ электродвигателя»).
[0023] Хотя это и не показано, ЭБУ 40 электродвигателя выполнен как микропроцессор, который имеет ЦП в качестве центрального компонента, и в дополнение к ЦП включает в себя ПЗУ, которое хранит программу обработки, ОЗУ, которое временно хранит данные, входные/выходные порты и коммуникационный порт. ЭБУ 40 электродвигателя принимает сигналы от различных датчиков через входной порт, и эти сигналы необходимы для управления приведением в действие электродвигателей ЭГ1, ЭГ2. В качестве сигналов, принимаемых ЭБУ 40 электродвигателя, могут использоваться, например, вращательные положения θm1, θm2 от датчиков 43, 44 определения вращательных положений, которые соответственно определяют вращательные положения роторов электродвигателей ЭГ1, ЭГ2, фазные токи от датчика тока, который определяет ток, протекающий через каждую фазу электродвигателей ЭГ1, ЭГ2, и т.п. ЭБУ 40 электродвигателя выдает переключающий сигнал управления на каждый из непроиллюстрированных переключающих элементов инверторов 41, 42, и т.п. через выходной порт. ЭБУ 40 электродвигателя соединен с ГТЭБУ 70 через коммуникационный порт, управляет приведением в действие электродвигателей ЭГ1, ЭГ2 с помощью сигнала управления от ГТЭБУ 70, и выдает, при необходимости, данные по состояниям приведения в действие электродвигателей ЭГ1, ЭГ2 на ГТЭБУ 70. ЭБУ 40 электродвигателя вычисляет скорости вращения Nm1, Nm2 электродвигателей ЭГ1, ЭГ2 на основе вращательных положений θm1, θm2 роторов электродвигателей ЭГ1, ЭГ2, получаемых от датчиков 43, 44 определения вращательных положений.
[0024] Аккумулятор 50 выполнен как литий-ионный вторичный аккумулятор или никель-водородный вторичный аккумулятор, например. Аккумулятор 50 соединен с инверторами 41, 42 с помощью линий 54 электропитания. Этот аккумулятор 50 управляется электронным блоком 52 управления аккумулятора (далее именуемым « ЭБУ аккумулятора»).
[0025] Хотя это и не показано, ЭБУ 52 аккумулятора выполнен как микропроцессор, который имеет ЦП в качестве центрального компонента, и включает в себя ПЗУ, которое хранит программу обработки, ОЗУ, которое временно хранит данные, входные/выходные порты и коммуникационный порт в дополнение к ЦП. ЭБУ 52 аккумулятора принимает сигналы от различных датчиков через входной порт, и эти сигналы необходимы для управления аккумулятором 50. Сигналами, которые поступают в ЭБУ 52 аккумулятора, могут быть, например, сигналы напряжения Vb аккумулятора от датчика 51а напряжения, который установлен между клеммами аккумулятора 50, тока Ib аккумулятора от датчика 51b тока, который присоединен к выходной клемме аккумулятора 50, температуры Tb аккумулятора от датчика 51 с температуры, который присоединен к аккумулятору 50, и т.п. ЭБУ 52 аккумулятора соединен с ГТЭБУ 70 через коммуникационный порт, и при необходимости выдает данные о состоянии аккумулятора 50 на ГТЭБУ 70. ЭБУ 52 аккумулятора вычисляет состояние зарядки СЗ на основе интегрированной величины тока Ib аккумулятора от датчика 51b тока. Состояние зарядки СЗ представляет собой отношение емкости, определяемой по электроэнергии, которая может быть выдана из аккумулятора 50, к полной емкости аккумулятора 50.
[0026] Хотя это и не показано, ГТЭБУ 70 выполнен как микропроцессор, который имеет ЦП в качестве центрального компонента, и включает в себя ПЗУ, которое хранит программу обработки, ОЗУ, которое временно хранит данные, входные/выходные порты и коммуникационный порт в дополнение к ЦП. ГТЭБУ 70 принимает сигналы от различных датчиков через входной порт. В качестве сигналов, полученных от ГТЭБУ 70, можно назвать, например, сигнал зажигания от замка 80 зажигания, положение SP переключения от датчика 82 положения переключения, который определяет рабочее положения рычага 81 переключения передач, величину Acc работы педали акселератора от датчика 84 положения педали акселератора, который определяет величину выжимания педали 83 акселератора, положение BP педали тормоза от датчика 86 положения педали тормоза, который определяет величину выжимания педали 85 тормоза, и т.п. Кроме того, могут использоваться скорость V транспортного средства от датчика 88 скорости транспортного средства, атмосферное давление Ра от датчика 89 атмосферного давления и сигнал управления переключением режима от переключателя 90 режима переключения, и пр. Как описано выше, ГТЭБУ 70 соединен с ЭБУ 24 двигателя, ЭБУ 40 электродвигателя, и ЭБУ 52 аккумулятора через коммуникационный порт и обменивается различными сигналами управления и данными с ЭБУ 24 двигателя, ЭБУ 40 электродвигателя, и ЭБУ 52 аккумулятора.
[0027] При этом в качестве положений SP переключения, предусмотрены положение (Р положение) парковки, положение заднего хода (положение R), нейтральное положение (положение N), положение переднего хода (положение D), положение ручного переключения (положение М) и т.п. Положение переключения на верхнюю передачу (положение +) и положение переключения на нижнюю передачу (положение -) находятся на стороне положения ручного переключения (положения М). Когда в качестве положения SP переключения выбрано положение ручного переключения (положение М), работа двигателя 22 управляется таким образом, что двигатель 22 соединяется с приводным валом 36 через виртуальную шести ступенчатую автоматическую трансмиссию. Переключатель 90 переключения режима представляет собой переключатель, который выбирает режим движения, который включает в себя режим приоритета ощущения управления и обычный режим движения. В режиме приоритета ощущения управления, ощущение водителем управления (ощущение ходовых качеств при управлении) является приоритетным, хотя при этом попутно несколько снижается топливная экономичность. В обычном режиме движения, топливная экономичность является приоритетной. В случаях, когда выбран обычный режим движения, и положение SP переключения представляет собой положение переднего хода (положение D), работа двигателя 22 и электродвигателей ЭГ1, ЭГ2 управляется таким образом, что бесшумность и топливная экономичность топлива сбалансированы. В случаях, когда выбран режим приоритета ощущения управления, и положение SP переключения представляет собой положение переднего хода (положение D), работа двигателя 22 управляется таким образом, что двигатель 22 соединяется с приводным валом 36 через виртуальную шестиступенчатую автоматическую трансмиссию.
[0028] Гибридное транспортное средство 20 согласно первому примеру, которое выполнено, как описано выше, движется в любом из множества режимов движения, которые включают в себя гибридный режим движения (движение ГТ) и электрический режим движения (движение ЭТ). При этом режим движения ГТ представляет собой режим, в котором транспортное средство движется при использовании мощности от двигателя 22 и мощности от электродвигателей ЭГ1, ЭГ2 во время работы двигателя 22. Режим движения ЭТ представляет собой режим, в котором транспортное средство движется при использовании мощности от электродвигателя ЭГ2, при этом двигатель 22 не работает.
[0029] Далее будет сделано описание функционирования гибридного транспортного средства 20, которое выполнено, как описано выше, в частности его функционирование в то время, когда режим приоритета ощущения управления выбран переключателем 90 переключения режима. Фиг. 2 представляет собой блок-схему примера программы управления режимом приоритета ощущения управления, которая выполняется ГТЭБУ 70 в то время, когда выбран режим приоритета ощущения управления, и положение SP переключения является положением переднего хода (положением D). Программа периодически выполняется с заданными временными интервалами (например, каждые несколько миллисекунд). До объяснения управления движением во время режима приоритета ощущения управления и положения D при использовании программы управления режимом приоритета ощущения управления с фиг. 2, для простоты объяснения будет сделано описание управления движением во время обычного режима и положения D (управления движением во время режима движения ГТ).
[0030] В обычном режиме движения, когда транспортное средство движется в режиме движения ГТ, управление движением выполняется ГТЭБУ 70 следующим образом. ГТЭБУ 70 сначала вычисляет требуемый приводной момент Tda от акселератора, которая требуется для движения (требуется на приводном валу 36) на основе величины Acc работы педали акселератора и скорости V транспортного средства, и устанавливает требуемый приводной момент Tda от акселератора в качестве выполняемого приводного момента Td*. Требуемый приводной момент Tda от акселератора можно вычислить, исходя из карты установки требуемого приводного момента от акселератора, которая проиллюстрирована, например, на фиг. 3. Далее требуемая мощность Pedrv движения, которая требуется для движения, вычисляется путем умножения установленного выполняемого приводного момента Td* на скорость вращения Nd приводного вала 36. При этом в качестве скорости вращения Nd приводного вала 36, может применяться скорость вращения, которую получают путем умножения скорости вращения Nm2 электродвигателя ЭГ2 на коэффициент km преобразования, или скорость вращения, которую получают путем умножения скорости V транспортного средства на коэффициент kv преобразования, и т.п. Далее, ГТЭБУ 70 устанавливает требуемую мощность Pb* зарядки/разрядки аккумулятора 50 (имеет положительное значение, когда аккумулятор 50 разряжается) таким образом, что состояние зарядки СЗ аккумулятора 50 приближается к целевому СЗ*. Как показано следующим уравнением (1), ГТЭБУ 70 вычисляет целевую мощность Ре* двигателя путем вычитания требуемой мощности Pb* зарядки/разрядки аккумулятора 50 из требуемой мощности Pedrv движения. Например, требуемая мощность Pb* зарядки/разрядки устанавливается картой установки требуемой мощности зарядки/разрядки, которая проиллюстрирована на фиг. 4. Мертвая зона от значения S1 до значения S2, которая сосредоточена на целевом СЗ*, находится в карте установки требуемой мощности зарядки/разрядки. Мощность разрядки (мощность с положительным значением) устанавливается для требуемой мощности Pb* зарядки/разрядки, когда состояние зарядки СЗ больше, чем значение S2 на верхней границе мертвой зоны. Мощность зарядки (мощность с отрицательным значением) устанавливается для требуемой мощности Pb* зарядки/разрядки, когда состояние зарядки СЗ меньше, чем значение S1 на нижней границе мертвой зоны.

[0031] Далее ГТЭБУ 70 вычисляет оптимальную скорость вращения Nefc двигателя для топливной экономичности путем использования целевой мощности Ре* двигателя и карты установки оптимальной скорости вращения двигателя для топливной экономичности, и устанавливает оптимальную скорость вращения Nefc двигателя для топливной экономичности в качестве целевой скорости вращения Ne* двигателя. Пример карты установки оптимальной скорости вращения двигателя для топливной экономичности показан на фиг. 5. Карта установки оптимальной скорости вращения двигателя для топливной экономичности определяется экспериментальным путем и т.п. в качестве карты скорости вращения, на которой двигатель 22 может эффективно работать, относительно целевой мощности Ре* двигателя. Оптимальная скорость вращения Nefc двигателя для топливной экономичности обычно возрастает, когда целевая мощность Ре* двигателя увеличивается. Таким образом, целевая скорость вращения Ne* двигателя также возрастает, когда целевая мощность Ре* двигателя увеличивается. Далее, как показано последующим уравнением (2), ГТЭБУ 70 вычисляет командный крутящий момент Tm1* электродвигателя ЭГ1 путем использования скорости вращения Ne двигателя 22, целевой скорости вращения Ne* двигателя, целевой мощности Ре* двигателя, и передаточного числа р планетарной передачи 30 (число зубьев солнечной шестерни / число зубьев кольцевой шестерни). Уравнение (2) представляет собой реляционное уравнение скорости управления с обратной связью, которая используется для вращения двигателя 22 при целевой скорости вращения Ne* двигателя. В уравнении (2) первый член уравнения в правой части представляет собой член с прямой связью, а второй член уравнения и третий член уравнения с правой стороны являются пропорциональным членом и интегральным членами с обратной связью, соответственно. Первый член в правой части уравнения представляет собой крутящий момент, используемый для получения крутящего момента от электродвигателя ЭГ1, при этом крутящий момент поступает от двигателя 22 и подается на вращающийся вал электродвигателя ЭГ1 через планетарную шестерню 30. Второй член «kp» в правой части уравнения представляет собой коэффициент усиления пропорционального члена уравнения, и третий член «ki» в правой части уравнения представляет собой коэффициент усиления интегрального члена уравнения. При этом, с учетом, по существу, устойчивого состояния двигателя 22 (целевая скорость вращения Ne* двигателя и целевая мощность Ре* двигателя являются, по существу, постоянными), понятно, что когда целевая мощность Ре* двигателя увеличивается, первый член в правой части уравнения (2) уменьшается (увеличивается в качестве абсолютного значения), командный крутящий момент Tm1* электродвигателя ЭГ1 уменьшается (увеличивается на отрицательной стороне), а электрическая мощность электродвигателя ЭГ1 (показывает положительное значение при расходе электроэнергии), которую получают путем умножения командного крутящего момента Tm1* электродвигателя ЭГ1 на скорость вращения Nm1, снижается (увеличивается в качестве генерируемой электроэнергии).

[0032] Далее, как показано нижеследующим уравнением (3), ГТЭБУ 70 устанавливает командный крутящий момент Tm2* электродвигателя ЭГ2 путем вычитания крутящего момента (-Tm1*/ρ) из выполняемого приводного момента Td*, при этом крутящий момент поступает от электродвигателя ЭГ1 и подается на приводной вал 36 через планетарную передачу 30 в то время, когда электродвигатель ЭГ1 приводится в действие командным крутящим моментом Tm1*. Следует отметить, что командный крутящий момент Tm2* электродвигателя ЭГ2 ограничен предельным крутящим моментом Tm2max, который получают с помощью уравнения (4), исходя из выдаваемого предельного значения Wout аккумулятора 50. Как выражено уравнением (4), предельный крутящий момент Tm2max получают путем вычитания электрической мощности электродвигателя ЭГ1 из выдаваемого предельного значения Wout аккумулятора 50, и деления этого на скорость вращения Nm2 электродвигателя ЭГ2, при этом электрическую мощность получают путем умножения командного крутящего момента Tm1* электродвигателя ЭГ1 на скорость вращения Nm1.


[0033] Когда целевая мощность Ре* двигателя, целевая скорость вращения Ne* двигателя, и командные крутящие моменты Tm1*, Tm2* электродвигателей ЭГ1, ЭГ2 установлены тем образом, что описан выше, целевая мощность Ре* двигателя и целевая скорость вращения Ne* двигателя передаются на ЭБУ 24 двигателя, и командные крутящие моменты Tm1*, Tm2* электродвигателей ЭГ1, ЭГ2 передаются на ЭБУ 40 электродвигателя.
[0034] После получения значений целевой мощности Ре* двигателя и целевой скорости вращения Ne* двигателя, ЭБУ 24 двигателя выполняет управление объемом всасываемого воздуха, управление впрыском топлива, управление зажиганием двигателя 22, и т.п. таким образом, что двигатель 22 работает на основе принятых значений целевой мощности Ре* двигателя и целевой скорости вращения Ne* двигателя. После получения командных крутящих моментов Tm1*, Tm2* электродвигателей ЭГ1, ЭГ2 ЭБУ 40 электродвигателя выполняет управление переключением множества переключающих элементов инверторов 41, 42 таким образом, что электродвигатели ЭГ1, ЭГ2 приводятся в действие с командными крутящими моментами Tm1*, Tm2*.
[0035] B режиме движения ГТ, когда целевая мощность Ре* двигателя становится ниже порога Pref, ГТЭБУ 70 определяет, что установилось условие остановки двигателя 22, останавливает работу двигателя 22, и переключает на режим движения ЭТ.
[0036] В режиме движения ЭТ, ГТЭБУ 70 устанавливает выполняемый приводной момент Td*, как в режиме движения ГТ, устанавливает значение 0 для командного крутящего момента Tm1* электродвигателя ЭГ1, и устанавливает командный крутящий момент Tm2* электродвигателя ЭГ2, как в режиме движения ГТ. Далее ГТЭБУ 70 передает командные крутящие моменты Tm1*, Tm2* электродвигателей ЭГ1, ЭГ2 на ЭБУ 40 электродвигателя. Как описано выше, ЭБУ 40 электродвигателя выполняет управление переключением множества переключающих элементов инверторов 41, 42.
[0037] В этом режиме движения ЭТ, когда целевая мощность Ре* двигателя, которую вычисляют также, как и в режиме движения ГТ, становится равна или выше порога Pref, ГТЭБУ 70 определяет, что установилось условие запуска двигателя 22, запускает двигатель 22, и переключает на режим движения ЭТ.
[0038] Далее будет сделано описание управления движением во время режима приоритета ощущения управления и положения D путем использования программы управления режимом приоритета ощущения управления на фиг. 2. Когда выполняется программа управления режимом приоритета ощущения управления, ГТЭБУ 70 сначала получает величину Acc работы педали акселератора от датчика 84 положения педали акселератора, скорость V транспортного средства от датчика 88 скорости транспортного средства, и скорость вращения Ne двигателя 22 (этап S100), и устанавливает требуемый приводной момент Tda от акселератора путем использования принятой величины Acc работы педали акселератора, скорости V транспортного средства, а также карты установки требуемого приводного момента от акселератора на фиг. 3 (этап S110). При этом скорость вращения Ne двигателя 22, которую вычисляют на основе угла θcr поворота коленчатого вала от датчика 23 угла поворота коленчатого вала, может приниматься от ЭБУ 24 двигателя путем коммуникации.
[0039] Далее ГТЭБУ 70 устанавливает ступень М передачи путем использования величины Acc работы педали акселератора, скорости V транспортного средства, а также схемы изменения передачи (этап S120), и устанавливает целевую скорость вращения Netagf двигателя для ощущения управления, путем использования скорости V транспортного средства, ступени М передачи, а также карты установки целевой скорости вращения двигателя для ощущения управления (этап S130). Один пример схемы изменения передачи показан на фиг. 6. На схеме сплошные линии представляют собой линии повышения передачи, прерывистые линии представляют собой линии понижения передачи. В первом примере транспортное средство управляется как имеющее виртуальную шестиступенчатую автоматическую трансмиссию. Таким образом, схема изменения передачи соответствует шестиступенчатому изменению передачи. На фиг. 7 показан один пример карты установки целевой скорости вращения двигателя для ощущения управления. На карте установки целевой скорости вращения двигателя для ощущения управления согласно первому примеру, целевая скорость вращения Netagf двигателя для ощущения управления установлена так, чтобы иметь линейную зависимость от скорости V транспортного средства на каждой ступени передачи, и так, чтобы ее градиент по отношению к скорости V транспортного средства уменьшался, когда ступень передачи переключается на повышающую ступень передачи. Причиной, по которой целевая скорость вращения Netagf двигателя для ощущения управления устанавливается вышеописанным образом, заключается в обеспечении для водителя ощущения управления транспортного средства, на котором установлена автоматическая трансмиссия, путем увеличения скорости вращения Ne двигателя 22, когда скорость V транспортного средства возрастает на каждой ступени передачи, путем уменьшения скорости вращения Ne двигателя 22 при переключении на повышающую передачу, и путем увеличения скорости вращения Ne двигателя 22 при переключении на понижающую передачу.
[0040] Далее верхняя предельная мощность Pelim двигателя устанавливается путем прибавления требуемой мощности Pb* зарядки/разрядки к экспериментальной верхней предельной мощности Pelim двигателя, которую получают путем использования целевой скорости вращения Netagf двигателя для ощущения управления и карты установки верхней предельной мощности двигателя (этап S140). Причина, по которой добавляется требуемая мощность Pb* зарядки/разрядки, состоит в предотвращении изменения выходной мощности двигателя 22 в то время, когда аккумулятор 50 заряжается/разряжается, и это будет описано ниже. Следует отметить, что, когда состояние зарядки СЗ находится в пределах мертвой зоны (диапазон от значения S1 до значения S2 на фиг. 4), центром которой является целевое СЗ*, устанавливается значение 0 для требуемой мощности Pb* зарядки/разрядки. Соответственно, сама экспериментальная верхняя предельная мощность Pelim двигателя, которую получают из карты установки верхней предельной мощности двигателя, устанавливается в качестве верхней предельной мощности Pelim двигателя. После того, как верхняя предельная мощность Pelim двигателя устанавливается вышеописанным образом, верхний предельный приводной момент Tdlim устанавливается путем деления верхней предельной мощности Pelim двигателя на скорость вращения Nd приводного вала 36 (этап S150). Как описано выше, в качестве скорости вращения Nd приводного вала 36, может быть использована скорость вращения, которую получают путем умножения скорости вращения Nm2 электродвигателя ЭГ2 на коэффициент km преобразования, скорость вращения, которую получают путем умножения скорости V транспортного средства на коэффициент kv преобразования, и т.п.
[0041] Далее проводится сравнение требуемого приводного момента Tda от акселератора и верхнего предельного приводного момента Tdlim (этап S160). Когда требуемый приводной момент Tda от акселератора равен или ниже, чем верхний предельный приводной момент Tdlim, аналогично обычному режиму движения ГТЭБУ 70 устанавливает требуемый приводной момент Tda от акселератора в качестве выполняемой приводного момента Td* (этап S170), и устанавливает мощность, которую получают путем вычитания требуемой мощности Pb* зарядки/разрядки, из мощности, которую получают путем умножения требуемого приводного момента Tda от акселератора на скорость вращения Nd приводного вала 36 в качестве целевой мощности Ре* двигателя (этап S180). Таким образом, можно сказать, что целевая мощность Ре* двигателя соответствует мощности, при которой требуемый приводной момент Tda от акселератора подается на приводной вал 36.
[0042] С другой стороны, если на этапе S160 определяется, что требуемый приводной момент Tda от акселератора выше, чем верхний предельный приводной момент Tdlim, ГТЭБУ 70 устанавливает верхний предельный приводной момент Tdlim в качестве выполняемого приводного момента Td* (этап S190), и мощность, которую получают путем вычитания требуемой мощности Pb* зарядки/разрядки из верхней предельной мощности Pelim двигателя, устанавливается в качестве целевой мощности Ре* двигателя (этап S200). Верхняя предельная мощность Pelim двигателя устанавливается путем сложения требуемой мощности Pb* зарядки/разрядки с экспериментальной верхней предельной мощностью Pelim двигателя, которую получают из карты установки верхней предельной мощности двигателя на этапе S140. Для установки мощности, которую получают путем вычитания требуемой мощности Pb* зарядки/разрядки из верхней предельной мощности Pelim двигателя, в качестве целевой мощности Ре* двигателя, нужно установить в качестве целевой мощности Ре* двигателя саму экспериментальную верхнюю предельную мощность Pelim двигателя, которую получают из карты установки верхней предельной мощности двигателя. Когда требуемая мощность Pb* зарядки/разрядки учитывается так, как описано выше, рабочая точка двигателя 22 может быть такой же, независимо от зарядки/разрядки аккумулятора 50. Кроме того, верхний предельный приводной момент Tdlim вычисляют путем деления верхней предельной мощности Pelim двигателя на скорость вращения Nd приводного вала 36 на этапе S150. Можно сказать, что верхняя предельная мощность Pelim двигателя соответствует мощности, с которой верхний предельный приводной момент Tdlim подается на ведущий вал 36.
[0043] Далее ГТЭБУ 70 определяет, является ли ступень М передачи равной или выше порога Mref (этап S210). При этом, в качестве порога Mref может использоваться, например, шестая ступень передачи, пятая ступень передачи, и т.п., как высшая ступень передачи. Когда ступень М передачи равна или выше порога Mref, ГТЭБУ 70 использует целевую мощность Ре* двигателя и карту установки оптимальной скорости вращения двигателя для топливной экономичности с фиг. 5 для установки оптимальной скорости вращения Nefc двигателя для топливной экономичности (этап S220), и меньшую величину из оптимальной скорости вращения Nefc двигателя для топливной экономичности и целевой скорости вращения Netagf двигателя для ощущения управления устанавливает в качестве целевой скорости вращения Ne* двигателя (этап S230). Причина, по которой наименьшая величина из оптимальной скорости вращения Nefc двигателя для топливной экономичности и целевой скорости вращения Netagf двигателя для ощущения управления устанавливается в качестве целевой скорости вращения Ne* двигателя в то время, когда ступень М передачи равна или выше порога Mref, состоит в том, чтобы предотвратить работу двигателя на высокой скорости вращения в той степени, которая вызывает у водителя возникает чувство дискомфорта, принимая при этом во внимание топливную экономичность. Если транспортное средство движется на относительно высокой скорости вращения и при этом ступень М передачи является высокой ступенью передачи порога Mref или выше, например, шестой ступенью передачи в качестве высшей ступени передачи, то существенно высокая мощность не требуется для движения. Таким образом, оптимальная скорость вращения Nefc двигателя для топливной экономичности может оказаться ниже, чем скорость вращения Nedrvf двигателя для ощущения управления. В этом случае оптимальная скорость вращения Nefc двигателя для топливной экономичности устанавливается в качестве целевой скорости вращения Ne* двигателя. Таким образом, топливная экономичность может быть предпочтительной. С другой стороны, если оптимальная скорость вращения Nefc двигателя для топливной экономичности оказываются выше, чем скорость вращения Nedrvf двигателя для ощущения управления, то скорость вращения Nedrvf двигателя для ощущения управления устанавливается в качестве целевой скорости вращения Ne* двигателя. Таким образом, двигатель 22 может работать на скорости вращения, которая соответствуют ступени М передачи. Таким образом, можно предотвращать работу двигателя 22 на высокой скорости вращения, вызывающей у водителя возникает чувство дискомфорта, и при этом учитывать топливную экономичность.
[0044] Если ГТЭБУ 70 определяет, что ступень М передачи ниже порога Mref на этапе S210, то ГТЭБУ 70 устанавливает целевую скорость вращения Netagf двигателя для ощущения управления в качестве целевой скорости вращения Ne* двигателя (этап S240). Когда скорость вращения Nedrvf двигателя для ощущения управления, устанавливается в качестве целевой скорости вращения Ne* двигателя, двигатель 22 может работать на скорости вращения, которая соответствует ступени М передачи, и у водителя может возникать благоприятное ощущение при управлении.
[0045] Далее ГТЭБУ 70 устанавливает командный крутящий момент Tm1* электродвигателя ЭГ1 в соответствии с вышеописанным уравнением (2) (этап S250) и устанавливает командный крутящий момент Tm2* электродвигателя ЭГ2 в соответствии с уравнением (3) (этап S260). Целевая мощность Ре* двигателя и целевая скорость вращения Ne* двигателя передаются на ЭБУ 24 двигателя, и командные крутящие моменты Tm1*, Tm2* передаются на ЭБУ электродвигателя 40 (этап S270). На этом программа заканчивается.
[0046] В данной программе, когда требуемый приводной момент Tda от акселератора равен или ниже, чем верхний предельный приводной момент Tdlim, и ступень М передачи ниже порога Mref, ГТЭБУ 70 в качестве целевой мощности Ре* двигателя устанавливает мощность, при которой требуемый приводной момент Tda от акселератора подается на приводной вал 36, и в качестве целевой скорости вращения Ne* двигателя устанавливает целевую скорость вращения Netagf двигателя для ощущения управления. Когда требуемый приводной момент Tda от акселератора равен или ниже, чем верхний предельный приводной момент Tdlim, и ступень М передачи равна или выше порога Mref, ГТЭБУ 70 в качестве целевой мощности Ре* двигателя устанавливает мощность, при которой требуемый приводной момент Tda от акселератора подается на приводной вал 36, и в качестве целевой скорости вращения Ne* двигателя устанавливает наименьшую из оптимальной скорости вращения Nefc двигателя для топливной экономичности, при которой целевая мощность Ре* двигателя, обеспечивающая оптимальную топливную экономичность, выдается из двигателя 22, и целевой скорости вращения Netagf двигателя для ощущения управления. Когда требуемый приводной момент Tda от акселератора выше, чем верхний предельный приводной момент Tdlim, и ступень М передачи ниже порога Mref, ГТЭБУ 70 в качестве целевой мощности Ре* двигателя устанавливает мощность, при которой верхний предельный приводной момент Tdlim подается на приводной вал 36, и в качестве целевой скорости вращения Ne* двигателя устанавливает целевую скорость вращения Netagf двигателя для ощущения управления. Когда требуемый приводной момент Tda от акселератора выше, чем верхний предельный приводной момент Tdlim, и ступень М передачи равна или выше порога Mref, ГТЭБУ 70 в качестве целевой мощности Ре* двигателя устанавливает мощность, при которой верхний предельный приводной момент Tdlim подается на приводной вал 36, и в качестве целевой скорости вращения Ne* двигателя устанавливает наименьшую из оптимальной скорости вращения Nefc двигателя для топливной экономичности, при которой целевая мощность Ре* двигателя, обеспечивающая оптимальную топливную экономичность, выдается из двигателя 22, и целевой скорости вращения Netagf двигателя для ощущения управления. Таким образом, в любом из этих случаев, можно предотвратить возрастание скорости вращения Ne двигателя 22 выше целевой скорости вращения Netagf двигателя для ощущения управления, которая определяется на основе скорости V транспортного средства и ступени М передачи.
[0047] В гибридном транспортном средстве 20 первого примера осуществления, которое было описано выше, во время положения D в режиме приоритета ощущения управления, ступень М передачи устанавливается на основе величины Acc работы педали акселератора и скорости V транспортного средства, а целевая скорость вращения Netagf двигателя для ощущения управления устанавливается на основе скорости V транспортного средства и ступени М передачи. Кроме того, в гибридном транспортном средстве 20 первого примера осуществления, верхняя предельная мощность Pelim двигателя устанавливается на основе целевой скорости вращения Netagf двигателя для ощущения управления, а верхний предельный приводной момент Tdlim устанавливается путем деления верхней предельной мощности Pelim двигателя на скорость вращения Nd приводного вала 36. Далее, в гибридном транспортном средстве 20 первого примера, двигатель 22 и электродвигатели ЭГ1, ЭГ2 управляются таким образом, что мощность, при которой наименьший момент из требуемого приводного момента Tda от акселератора и верхнего предельного приводного момента Tdlim подается на приводной вал 36, устанавливается в качестве целевой мощности Ре* двигателя, при этом транспортное средство движется в то время, когда целевая мощность Ре* двигателя выдается из двигателя 22. Обобщая вышеизложенное, гибридное транспортное средство 20 первого примера управляется для обеспечения движения в таком состоянии, когда целевая мощность Ре* двигателя устанавливается таким образом, что наименьший из требуемого приводного момента Tda от акселератора, который устанавливается без учета ступени М передачи, и верхнего предельного приводного момента Tdlim, который устанавливается с учетом ступени М передачи, подается на ведущий вал 36, и целевая мощность Ре* двигателя выдается из двигателя 22. Соответственно, даже когда водитель выжимает педаль 83 акселератора, скорость вращения Ne двигателя 22 может соответствовать скорости V транспортного средства, и, таким образом, водитель может испытывать дополнительное благоприятное ощущение от управления по сравнению со случаем, когда скорость вращения Ne двигателя 22 быстро возрастает до увеличения скорости V транспортного средства. Кроме того, когда ступень передачи меняется (переключается), целевая мощность Ре* двигателя, которая соответствует ступени М передачи, также меняется. Таким образом, водитель может испытывать ощущение смены передачи. В результате этого, водитель может испытывать дополнительное благоприятное ощущение при управлении.
[0048] Кроме того, в гибридном транспортном средстве 20 первого примера, когда ступень М передачи ниже порога Mref, целевая скорость вращения Netagf двигателя для ощущения управления устанавливается в качестве целевой скорости вращения Ne* двигателя. Таким образом, когда ступень М передачи ниже порога Mref, можно предотвратить возрастание скорости вращения Ne двигателя 22 выше скорости вращения (целевой скорости вращения Netagf двигателя для ощущения управления), которая соответствует скорости V транспортного средства и ступени М передачи. Когда ступень М передачи равна или выше порога Mref, наименьшая из оптимальной скорости вращения Nefc двигателя для топливной экономичности, при которой целевая мощность Ре* двигателя, обеспечивающая оптимальную топливную экономичность, выдается из двигателя 22, и целевой скорости вращения Netagf двигателя для ощущения управления устанавливается в качестве целевой скорости вращения Ne* двигателя. Таким образом, даже когда ступень М передачи равна или выше порога Mref, можно предотвратить возрастание скорости вращения Ne двигателя 22 выше скорости вращения (целевой скорости вращения Netagf двигателя для ощущения управления), которая соответствует скорости V транспортного средства и ступени М передачи.
[0049] В гибридном транспортном средстве 20 первого примера, если требуемый приводной момент Tda от акселератора равен или ниже, чем верхний предельный приводной момент Tdlim, то мощность, при которой требуемый приводной момент Tda от акселератора выдается на приводной вал 36, устанавливается в качестве целевой мощности Ре* двигателя, и оптимальная скорость вращения Nefc двигателя для топливной экономичности, которую обычно получают на основе требуемого приводного момента Tda от акселератора, устанавливается в качестве целевой скорости вращения Ne* двигателя. Таким образом, транспортное средство может двигаться с предпочтительной топливной экономичностью.
[0050] В гибридном транспортном средстве 20 первого примера, в случае, когда требуемый приводной момент Tda от акселератора выше, чем верхний предельный приводной момент Tdlim в то время, когда аккумулятор 50 заряжается/разряжается, верхняя предельная мощность Pelim двигателя определяется путем сложения требуемой мощности Pb* зарядки/разрядки с экспериментальной верхней предельной мощностью Pelim двигателя, которую получают из карты установки верхней предельной мощности двигателя (этап S140), а мощность, полученная путем вычитания требуемой мощности Pb* зарядки/разрядки из верхней предельной мощности Pelim двигателя, устанавливается в качестве целевой мощности Ре* двигателя (этап S200). Таким образом, даже в случае, когда требуемый приводной момент Tda от акселератора выше, чем верхний предельный приводной момент Tdlim, когда аккумулятор 50 заряжается/разряжается, целевая мощность Ре* двигателя устанавливается такой же, что и в случае, когда аккумулятор 50 не заряжается/разряжается, и двигатель 22 работает на рабочей точке, которая является такой же, что и в случае, когда аккумулятор 50 не заряжается/разряжается. Соответственно, предотвращается возрастание или уменьшение скорости вращения Ne двигателя 22 относительно скорости вращения (целевой скорости вращения Netagf двигателя для ощущения управления), которая соответствует скорости V транспортного средства и ступени М передачи, из-за зарядки/разрядки аккумулятора 50.
[0051] В гибридном транспортном средстве 20 первого примера, мощность, при которой меньший приводной момент из требуемого приводного момента Tda от акселератора и верхнего предельного приводного момента Tdlim выдается на приводной вал 36, устанавливается в качестве целевой мощности Ре* двигателя. Однако целевая мощность Ре* двигателя может быть установлена таким образом, что меньшая из мощности, которую получают путем умножения требуемого приводного момента Tda от акселератора на скорость вращения Nd приводного вала 36 (Tda × Nd), и мощности, которую получают путем умножения верхнего предельного приводного момента Tdlim на скорость вращения Nd приводного вала 36 (Tdlim × Nd), выдается на ведущий вал 36. То есть, на этапе S160 может выполняться процесс сравнения мощности, которую получают путем умножения требуемого приводного момента Tda от акселератора на скорость вращения Nd ведущего вала 36 (Tda × Nd), с мощностью, которую получают путем умножения верхнего предельного приводного момента Tdlim на скорость Nd вращения ведущего вала 36 (Tdlim × Nd).
[0052] В гибридном транспортном средстве 20 первого примера, когда ступень М передачи ниже порога Mref, целевая скорость вращения Netagf двигателя для ощущения управления устанавливается в качестве целевой скорости вращения Ne* двигателя. Когда ступень М передачи равна или выше порога Mref, наименьшая из оптимальной скорости вращения Nefc двигателя для топливной экономичности, при которой целевая мощность Ре* двигателя, обеспечивающая оптимальную топливную экономичность, выдается из двигателя 22, и целевой скорости вращения Netagf двигателя для ощущения управления устанавливается в качестве целевой скорости вращения Ne* двигателя. Однако целевая скорость вращения Netagf двигателя для ощущения управления может быть установлена в качестве целевой скорости вращения Ne* двигателя на всех ступенях М передачи, либо наименьшая из оптимальной скорости вращения Nefc двигателя для топливной экономичности, при которой целевая мощность Ре* двигателя, обеспечивающая оптимальную топливную экономичность, выдается из двигателя 22, и целевой скорости вращения Netagf двигателя для ощущения управления может быть установлена в качестве целевой скорости вращения Ne* двигателя на всех ступенях М передачи.
[0053] Гибридное транспортное средство 20 первого примера включает в себя переключатель 90 переключения режима, и программа управления режимом приоритета ощущения управления с фиг. 2 выполняется, когда режим приоритета ощущения управления выбран переключателем 90 переключения режима. Однако переключатель 90 переключения режима может быть не предусмотрен, и программа управления режимом приоритета ощущения управления с фиг. 2 может выполняться как обычное управление движением.
[0054] В гибридном транспортном средстве 20 первого примера, когда устанавливается верхняя предельная мощность Pelim двигателя, принимается во внимание зарядка/разрядка аккумулятора 50. Однако может дополнительно приниматься во внимание и атмосферное давление Ра. В этом случае, когда требуемый приводной момент Tda от акселератора выше, чем верхний предельный приводной момент Tdlim, верхняя предельная мощность Pelim двигателя может устанавливаться путем деления верхней предельной мощности Pelim двигателя, полученной на этапе S140, на коэффициент ка коррекции атмосферного давления, а целевая мощность Ре* двигателя может устанавливаться путем умножения целевой мощности Ре* двигателя, полученной на этапе S200, на коэффициент ka коррекции атмосферного давления. Один пример соотношения между коэффициентом ka коррекции атмосферного давления и атмосферным давлением Ра показан на фиг. 9. Мощность, которая выдается из двигателя 22, уменьшается при понижении атмосферного давления Ра. Таким образом, целевую мощность Ре* двигателя обычно устанавливают путем умножения на коэффициент ka коррекции атмосферного давления, который увеличивается при понижении атмосферного давления Ра. Таким образом, скорость вращения Ne двигателя 22 увеличивается. Однако, как показано в этом примере, когда верхняя предельная мощность Pelim двигателя устанавливается путем деления верхней предельной мощности Pelim двигателя на коэффициент ka коррекции атмосферного давления, а целевая мощность Ре* двигателя устанавливается путем умножения целевой мощности Ре* двигателя на коэффициент ka коррекции атмосферного давления, двигатель 22 может работать путем установки одинаковой целевой мощности Ре* двигателя независимо от атмосферного давления Ра. Таким образом, можно предотвратить возрастание или уменьшение скорости вращения Ne двигателя 22 относительно скорости вращения (целевой скорости вращения Netagf двигателя для ощущения управления), которая соответствует скорости V транспортного средства и ступени М передачи, в зависимости от величины атмосферного давления Ра. Кроме того, когда требуемый приводной момент Tda от акселератора равен или ниже, чем верхний предельный приводной момент Tdlim, целевая мощность Ре* двигателя может быть установлена путем умножения целевой мощности Ре* двигателя, полученной на этапе S180, на коэффициент ka коррекции атмосферного давления. Также и в этом случае, оптимальная скорость вращения Nefc двигателя для топливной экономичности, при которой целевая мощность Ре* двигателя, обеспечивающая оптимальную топливную экономичность, выдается из двигателя 22, ограничена скоростью вращения (целевой скоростью вращения Netagf двигателя для ощущения управления), которая соответствуют скорости V транспортного средства и ступени М передачи, и, таким образом, устанавливается целевая скорость вращения Ne* двигателя. Таким образом, можно предотвратить вызванное величиной атмосферного давления Ра превышение скоростью вращения Ne двигателя 22 скорости вращения (целевой скоростью вращения Netagf двигателя для ощущения управления), которая соответствует скорости V транспортного средства и ступени М передачи.
[0055] В гибридном транспортном средстве 20 первого примера, в случае, когда требуемый приводной момент Tda от акселератора выше, чем верхний предельный приводной момент Tdlim, когда аккумулятор 50 заряжается/разряжается, верхняя предельная мощность Pelim двигателя устанавливается путем сложения требуемой мощности Pb* зарядки/разрядки с экспериментальной верхней предельной мощностью Pelim двигателя, которую получают из карты установки верхней предельной мощности двигателя (этап S140), а мощность, которую получают путем вычитания требуемой мощности Pb* зарядки/разрядки из верхней предельной мощности Pelim двигателя, устанавливается в качестве целевой мощности Ре* двигателя (этап S200). Однако, как показано в программе управления режимом приоритета ощущения управления с фиг. 10, сама экспериментальная верхняя предельная мощность Pelim двигателя, которую получают из карты установки верхней предельной мощности двигателя, может быть установлена в качестве верхней предельной мощности Pelim двигателя (этап S140B), верхний предельный приводной момент Tdlim может быть установлен путем деления мощности, которую получают путем сложения требуемой мощности Pb* зарядки/разрядки с верхней предельной мощностью Pelim двигателя, на скорость вращения Nd приводного вала 36 (этап S150B), и сама верхняя предельная мощность Pelim двигателя может быть установлена в качестве целевой мощности Ре* двигателя (этап S200B). Хотя имеется разница между случаем, когда требуемая мощность Pb* зарядки/разрядки учитывается для вычисления верхней предельной мощности Pelim двигателя, и случаем, когда требуемая мощность Pb* зарядки/разрядки учитывается для вычисления верхнего предельного приводного момента Tdlim, результат тот же самый.
[0056] Далее будет сделано описание функционирования в то время, когда положение SP переключения гибридного транспортного средства 20 первого примера является положением ручного переключения (положением М). В этом случае может выполняться программа управления режимом приоритета ощущения управления, показанная на фиг. 11. Программа управления режимом приоритета ощущения управления с фиг. 11 такая же, что и программа управления режимом приоритета ощущения управления с фиг. 2, за исключением того пункта, что добавлен процесс введения ступени М передачи в качестве положения SP переключения (этап S105), того пункта, что удален процесс установки ступени М передачи путем использования схемы изменения передачи на этапе S120 с фиг. 2, и того пункта, что внедрен процесс установки целевой скорости вращения Netagf двигателя для ощущения управления в качестве целевой скорости вращения Ne* двигателя, независимо от ступени М передачи (этап S245). Далее приведено краткое описание управления движением в то время, когда положение SP переключения является положением ручного переключения (положением М), с использованием программы управления режимом приоритета ощущения управления с фиг. 11.
[0057] Когда выполняется программа управления режимом приоритета ощущения управления с фиг. 11, ГТЭБУ 70 сначала принимает значения величины Acc работы педали акселератора, скорости V транспортного средства, ступени М передачи, и скорости вращения Ne двигателя 22 (этап S105), и устанавливает требуемый приводной момент Tda от акселератора путем использования величины Acc работы педали акселератора, скорости V транспортного средства, а также карты установки требуемого приводного момента от акселератора с фиг. 3 (этап S110). Далее ГТЭБУ 70 устанавливает целевую скорость вращения Netagf двигателя для ощущения управления путем использования скорости V транспортного средства, ступени М передачи и карты установки целевой скорости вращения двигателя для ощущения управления с фиг. 7 (этап S130), и устанавливает верхнюю предельную мощность Pelim двигателя путем сложения требуемой мощности Pb* зарядки/разрядки с экспериментальной верхней предельной мощностью Pelim двигателя, которую получают путем использования целевой скорости вращения Netagf двигателя для ощущения управления и карты установки верхней предельной мощности двигателя с фиг. 8 (этап S140). Далее, ГТЭБУ 70 устанавливает верхний предельный приводной момент Tdlim путем деления верхней предельной мощности Pelim двигателя на скорость вращения Nd приводного вала 36 (этап S150) и сравнивает требуемый приводной момент Tda от акселератора с верхним предельным приводным моментом Tdlim (этап S160).
[0058] Если требуемый приводной момент Tda от акселератора равен или ниже, чем верхний предельный приводной момент Tdlim, ГТЭБУ 70 устанавливает требуемый приводной момент Tda от акселератора в качестве выполняемого приводного момента Td* (этап S170), и устанавливает мощность, которую получают путем вычитания требуемой мощности Pb* зарядки/разрядки из мощности, которую получают путем умножения требуемого приводного момента Tda от акселератора на скорость вращения Nd приводного вала 36, в качестве целевой мощности Ре* двигателя (этап S180). Если требуемый приводной момент Tda от акселератора выше, чем верхний предельный приводной момент Tdlim, то ГТЭБУ 70 устанавливает верхний предельный приводной момент Tdlim в качестве выполняемого приводного момента Td* (этап S190), и устанавливает мощность, которую получают путем вычитания требуемой мощности Pb* зарядки/разрядки из верхней предельной мощности Pelim двигателя, в качестве целевой мощности Ре* двигателя (этап S200).
[0059] Далее ГТЭБУ 70 устанавливает целевую скорость вращения Netagf двигателя для ощущения управления в качестве целевой скорости вращения Ne* двигателя (этап S245), устанавливает командный крутящий момент Tm1* электродвигателя ЭГ1 с помощью вышеописанного уравнения (2) (этап S250), и устанавливает командный крутящий момент Tm2* электродвигателя ЭГ2 с помощью уравнения (3) (этап S260). Далее ГТЭБУ 70 передает целевую мощность Ре* двигателя и целевую скорость вращения Ne* двигателя на ЭБУ 24 двигателя и передает командные крутящие моменты Tm1*, Tm2* на ЭБУ 40 электродвигателя (этап S270). После этого данная программа заканчивается.
[0060] В гибридном транспортном средстве 20 первого примера, описанном выше, когда положение SP переключения является положением ручного переключения (положением М), целевая скорость вращения Netagf двигателя для ощущения управления устанавливается в качестве целевой скорости вращения Ne* двигателя на всех ступенях М передачи. Таким образом, скорость вращения Ne двигателя 22 всегда может быть установлена как целевая скорость вращения Netagf двигателя для ощущения управления, которая определяется на основе скорости V транспортного средства и ступени М передачи. В результат этого водитель может испытывать дополнительное благоприятное ощущение при управлении.
[0061] Далее приведено описание гибридного транспортного средства 120 второго примера осуществления изобретения. На фиг. 12 показана схематическая конфигурация гибридного транспортного средства 120 второго примера. Как показано на фиг. 12, гибридное транспортное средство 120 второго примера имеет такую же конфигурацию, что и гибридное транспортное средство 20 первого примера, показанное на фиг. 1, за исключением того момента, что имеется трансмиссия 130. Чтобы опустить повторяющееся описание, отметим, что конфигурация гибридного транспортного средства 120 второго примера, которая аналогична таковой гибридного транспортного средства 20 первого примера, обозначена одними и теми же ссылочными позициями, и ее подробное описание приводиться не будет.
[0062] Трансмиссия 130, предусмотренная в гибридном транспортном средстве 120 второго примера, выполнена как ступенчатая автоматическая трансмиссия, которая имеет три передних ступени передачи с гидравлическим приводом. Ступень передачи трансмиссии 130 меняется сигналом управления из ГТЭБУ 70. В гибридном транспортном средстве 120 второго примера, помимо трех ступеней передачи трансмиссии 130, имеются три виртуальных ступени передачи. Таким образом, гибридное транспортное средство 120 второго примера функционирует, как если бы гибридное транспортное средство 120 включало в себя шестискоростную трансмиссию. Фиг. 13 является примером схемы изменения передачи, используемой во втором примере. Для простоты сопоставления, схема изменения передачи на фиг. 13 установлена такой же, что схема изменения передачи на фиг. 6. На фиг. 13 сплошная жирная линия представляет собой линию повышенной передачи трансмиссии 130, а прерывистая жирная линия представляет собой линию пониженной передачи трансмиссии 130. Тонкая сплошная линия представляет собой линию виртуальной повышенной передачи, а тонкая прерывистая линия представляет собой линию виртуальной пониженной передачи. На чертеже цифры и стрелки в верхней части и нижней части указывают на переключение передач на шести ступенях передач, в том числе виртуальных ступенях передач, а цифры и стрелки в скобках в верхней части и нижней части указывают на переключение передач на трех ступенях передач трансмиссии 130. Как показано на чертеже, каждая из виртуальных ступеней передач расположена между каждыми двумя ступенями передач трансмиссии 130.
[0063] В гибридном транспортном средстве 120 второго примера, во время положения D в режиме приоритета ощущения управления, выполняется программа управления режимом приоритета ощущения управления, показанная на фиг. 14. Программа управления режимом приоритета ощущения управления на фиг. 14 такая же, что и программа управления режимом приоритета ощущения управления на фиг. 2, за исключением того пункта, что этап S120C предусмотрен не только для установки ступени М передачи, но и реальной ступени Ма передачи, этап S260C предусмотрен для установки командного крутящего момента Tm2* электродвигателя ЭГ2 путем использования передаточного числа Gr реальной ступени Ма передачи трансмиссии 130, и этап S270C предусмотрен для использования реальной ступени Ма передачи трансмиссию 130 при передаче целевой мощности Ре* двигателя, целевой скорости вращения Ne* двигателя, и т.п. Соответственно, процессы в программе управления режимом приоритета ощущения управления с фиг. 14, которые идентичны процессам в программе управления режимом приоритета ощущения управления с фиг. 2, обозначены одними и теми же номерами этапов. Далее приведено краткое описание, сконцентрированное на пунктах программы управления режимом приоритета ощущения управления с фиг. 14, отличающихся от соответствующих им в программе управления режимом приоритета ощущения управления с фиг. 2.
[0064] Когда выполняется программа управления режимом приоритета ощущения управления с фиг. 14, ГТЭБУ 70 сначала принимает значения величины Acc работы педали акселератора, скорости V транспортного средства, и скорости вращения Ne двигателя 22 (этап S100), и устанавливает требуемый приводной момент Tda от акселератора путем использования величины Acc работы педали акселератора, скорости V транспортного средства, и карты установки требуемого приводного момента от акселератора с фиг. 3 (этап S110). Далее ГТЭБУ 70 устанавливает ступень М передачи и реальную ступень Ма передачи путем использования величины Acc работы педали акселератора, скорости V транспортного средства, и схемы изменения передачи с фиг. 12 (этап S120C). При этом ступень М передачи обозначает любую из шести ступеней передачи, которые включают в себя виртуальные ступени передачи, а реальная ступень Ма передачи обозначает любую из трех ступеней передачи трансмиссии 130. Соответственно, ступень М передачи устанавливается в соответствии со ступенью передачи из шести ступеней передачи, которым ступень М передачи соответствует на основе всех линий изменений передач с фиг. 13, а реальная ступень Ма передачи устанавливается в соответствии со ступенью передачи из трех ступеней передачи, которым ступень Ма передачи соответствует на основе сплошных жирных линий и прерывистых жирных линий на фиг. 13.
[0065] Далее ГТЭБУ 70 устанавливает целевую скорость вращения Netagf двигателя для ощущения управления путем использования скорости V транспортного средства, ступени М передачи, и карты установки целевой скорости вращения двигателя для ощущения управления с фиг. 7 (этап S130), и устанавливает верхнюю предельную мощность Pelim двигателя путем сложения требуемой мощности Pb* зарядки/разрядки с экспериментальной верхней предельной мощностью Pelim двигателя, которую получают путем использования целевой скорости вращения Netagf двигателя для ощущения управления, а также карты установки верхней предельной мощности двигателя с фиг. 8 (этап S140). Далее ГТЭБУ 70 устанавливает верхний предельный приводной момент Tdlim путем деления верхней предельной мощности Pelim двигателя на скорость вращения Nd приводного вала 36 (этап S150) и сравнивает требуемый приводной момент Tda от акселератора с верхним предельным приводным моментом Tdlim (этап S160).
[0066] Если требуемый приводной момент Tda от акселератора равен или ниже, чем верхний предельный приводной момент Tdlim, ГТЭБУ 70 устанавливает требуемый приводной момент Tda от акселератора в качестве выполняемого приводного момента Td* (этап S170), и устанавливает мощность, которую получают путем вычитания требуемой мощности Pb* зарядки/разрядки из мощности, которую получают путем умножения требуемого приводного момента Tda от акселератора на скорость вращения Nd приводного вала 36 в качестве целевой мощности Ре* двигателя (этап S180). Если требуемый приводной момент Tda от акселератора выше, чем верхний предельный приводной момент Tdlim, ГТЭБУ 70 устанавливает верхний предельный приводной момент Tdlim в качестве выполняемого приводного момента Td* (этап S190), и устанавливает мощность, которую получают путем вычитания требуемой мощности Pb* зарядки/разрядки из верхней предельной мощности Pelim двигателя в качестве целевой мощности Ре* двигателя (этап S200).
[0067] Далее ГТЭБУ 70 определяет, является ли ступень М передачи равной или выше порога Mref (этап S210). После этого, если ступень М передачи равна или выше порога Mref, то ГТЭБУ 70 устанавливает оптимальную скорость вращения Nefc двигателя для топливной экономичности путем использования целевой мощности Ре* двигателя и карты установки оптимальной скорости вращения двигателя для топливной экономичности с фиг. 5 (этап S220), и устанавливает наименьшую из установленных оптимальной скорости вращения Nefc двигателя для топливной экономичности и целевой скорости вращения Netagf двигателя для ощущения управления в качестве целевой скорости вращения Ne* двигателя (этап S230). С другой стороны, если ступень М передачи ниже порога Mref, ГТЭБУ 70 устанавливает целевую скорость вращения Netagf двигателя для ощущения управления в качестве целевой скорости вращения Ne* двигателя (этап S240).
[0068] Далее ГТЭБУ 70 устанавливает командный крутящий момент Tm1* электродвигателя ЭГ1 согласно описанному выше уравнению (2) (этап S250) и устанавливает командный крутящий момент Tm2* электродвигателя ЭГ2 в соответствии со следующим уравнением (5) (этап S260C). В уравнении (5), «Gr» представляет собой передаточное число реальной ступени Ма передачи трансмиссии 130. Соответственно, первый член в правой части уравнения (5) означает приводной момент, который должен подаваться на входной вал трансмиссии 130, чтобы выдавать выполняемый приводной момент Td* на приводной вал 36 как на выходной вал трансмиссии 130.

[0069] Далее ГТЭБУ 70 передает целевую мощность Ре* двигателя и целевую скорость вращения Ne* двигателя на ЭБУ 24 двигателя, передает командные крутящие моменты Tm1*, Tm2* на ЭБУ 40 электродвигателя, и передает реальную ступень Ма передачи на трансмиссию 130 (этап S270C). После этого данная программа заканчивается. Трансмиссия 130, которая принимает реальную ступень Ма передачи, поддерживает ступень передачи, когда ступень передачи во время приемки реальной ступени Ма передачи является реальной ступенью Ма передачи. Когда ступень передачи во время приемки реальной ступени Ма передачи не является реальной ступенью Ма передачи, трансмиссия 130 меняет ступень передачи таким образом, что ступень М передачи соответствует реальной ступени Ма передачи.
[0070] Аналогично первому примеру, в программе, когда требуемый приводной момент Tda от акселератора равен или ниже, чем верхний предельный приводной момент Tdlim, и ступень М передачи ниже порога Mref, ГТЭБУ 70 устанавливает мощность, при которой требуемый приводной момент Tda от акселератора подается на приводной вал 36, в качестве целевой мощности Ре* двигателя, и устанавливает целевую скорость вращения Netagf двигателя для ощущения управления в качестве целевой скорости вращения Ne* двигателя. Кроме того, когда требуемый приводной момент Tda от акселератора равен или ниже, чем верхний предельный приводной момент Tdlim, и ступень М передачи равна или выше порога Mref, ГТЭБУ 70 устанавливает мощность, при которой требуемый приводной момент Tda от акселератора подается на приводной вал 36, в качестве целевой мощности Ре* двигателя, и устанавливает наименьшую из оптимальной скорости вращения Nefc двигателя для топливной экономичности, при которой целевая мощность Ре* двигателя, обеспечивающая оптимальную топливную экономичность, выдается из двигателя 22, и целевой скорости вращения Netagf двигателя для ощущения управления в качестве целевой скорости вращения Ne* двигателя. Далее, когда требуемый приводной момент Tda от акселератора выше, чем верхний предельный приводной момент Tdlim, и ступень М передачи ниже порога Mref, ГТЭБУ 70 устанавливает мощность, при которой верхний предельный приводной момент Tdlim подается на приводной вал 36, в качестве целевой мощности Ре* двигателя, и устанавливает целевую скорость вращения Netagf двигателя для ощущения управления в качестве целевой скорости вращения Ne* двигателя. Кроме того, когда требуемый приводной момент Tda от акселератора выше, чем верхний предельный приводной момент Tdlim, и ступень М передачи равна или выше порога Mref, ГТЭБУ 70 устанавливает мощность, при которой верхний предельный приводной момент Tdlim подается на приводной вал 36, в качестве целевой мощности Ре* двигателя, и устанавливает наименьшую из оптимальной скорости вращения Nefc двигателя для топливной экономичности, при которой целевая мощность Ре* двигателя, обеспечивающая оптимальную топливную экономичность, выдается из двигателя 22, и целевой скорости вращения Netagf двигателя для ощущения управления в качестве целевой скорости вращения Ne* двигателя. Соответственно, в любом из этих случаев, можно предотвратить превышение скоростью вращения Ne двигателя 22 целевой скорости вращения Netagf двигателя для ощущения управления, определяемой на основе скорости V транспортного средства и ступени М передачи.
[0071] Гибридное транспортное средство 120 второго примера, которое было описано выше, функционирует таким же образом, что и гибридное транспортное средство 20 первого примера, и, таким образом, оказывает аналогичное воздействие на результаты, достигаемые гибридным транспортным средством 20 первого примера. То есть, гибридное транспортное средство 120 второго примера достигает такого результата, что даже когда водитель выжимает педаль 83 акселератора, скорость вращения Ne двигателя 22 может соответствовать скорости V транспортного средства и, таким образом, водитель может испытывать дополнительное благоприятное ощущение при управлении по сравнению со случаем, в котором скоростью вращения Ne двигателя 22 быстро возрастает до увеличения скорости V транспортного средства. Гибридное транспортное средство 120 второго примера также достигает такого результата, что когда ступень передачи меняется (переключается), целевая мощность Ре* двигателя, которая соответствует ступени М передачи, также меняется, и, таким образом, водитель может испытывать ощущение смены передачи. В результате этого, гибридное транспортное средство 120 достигает такого результата, что водитель может испытывать дополнительное благоприятное ощущение при управлении.
[0072] Далее приведено описание функционирования в то время, когда положение SP переключения гибридного транспортного средства 120 второго примера является положением ручного переключения (положением М). В этом случае может выполняться программа управления режимом приоритета ощущения управления, показанная на фиг. 15. Программа управления режимом приоритета ощущения управления с фиг. 15 является такой же, что и программа управления режимом приоритета ощущения управления с фиг. 11, за исключением того, что предусмотрен этап S260C установки командного крутящего момента Tm2* электродвигателя ЭГ2 путем использования передаточного числа Gr реальной ступени Ма передачи трансмиссии 130, а также этап S270C передачи реальной ступени Ма передачи на трансмиссию 130, когда обеспечивается передача целевой мощности Ре* двигателя, целевой скорости вращения Ne* двигателя, и т.п. Описание этого отличия такое же, что и описание программы управления режимом приоритета ощущения управления с фиг. 14, и, таким образом, описание не будет повторяться.
[0073] Гибридное транспортное средство 120 второго примера включает в себя трехскоростную трансмиссию 130 и функционирует так, как если бы имело шесть ступеней передачи, включая виртуальные ступени передачи. Однако трансмиссия 130 не ограничена трехскоростной трансмиссией, а может представлять собой двухскоростную трансмиссию, четырехскоростную трансмиссию, или выше. Кроме того, предусмотрены виртуальные ступени передачи, чтобы обеспечить соответствие числу ступеней трансмиссии. Однако виртуальные ступени передачи могут быть предусмотрены в нужном количестве ступеней, например, как одна ступень или две ступени, для каждой из ступеней передачи трансмиссии. Кроме того, нужное количество виртуальных ступеней передачи может быть предусмотрено для особой ступени (ступеней) передачи трансмиссии. Кроме того, может быть не предусмотрено виртуальных ступеней передачи.
[0074] Далее приведено описание соответствующих отношений между основными элементами примера осуществления и основными элементами изобретения, описанными в Сущности изобретения. Согласно примеру, двигатель 22 соответствует «двигателю», электродвигатель ЭГ1 соответствует «первому электродвигателю», приводной вал 36 соответствует «приводному валу», планетарная передача 30 соответствует «планетарному зубчатому механизму», электродвигатель ЭГ2 соответствует «второму электродвигателю», и аккумулятор 50 соответствует «аккумулятору». Кроме того, ГТЭБУ 70, ЭБУ 24 двигателя, и ЭБУ 40 электродвигателя, которые осуществляют управление движением в обычном режиме движения и программа управления режимом приоритета ощущения управления с фиг.2 соответствуют «электронному блоку управления».
[0075] Следует отметить, что, пример осуществления является всего лишь одним примером, конкретно описывающим режим осуществления изобретения, описанного в Сущности изобретения, и, таким образом, соответствующие взаимосвязи между основными элементами примера и основными элементами изобретения, описанными в Сущности изобретения, не ограничиваются элементами изобретения, описанными в Сущности изобретения. То есть, изобретение, описанное в Сущности изобретения, должно интерпретироваться на основе описания в Сущности изобретения, и пример осуществления представляет собой только пример изобретения, описанного в Сущности изобретения.
[0076] Режим осуществления изобретения описан выше с использованием примеров. Однако, разумеется, изобретение не ограничивается такими примерами в каком-либо отношении, и может быть реализовано в различных режимах в пределах объема и сущности изобретения.
[0077] Изобретение может применяться в области производства гибридных транспортных средств и т.п.
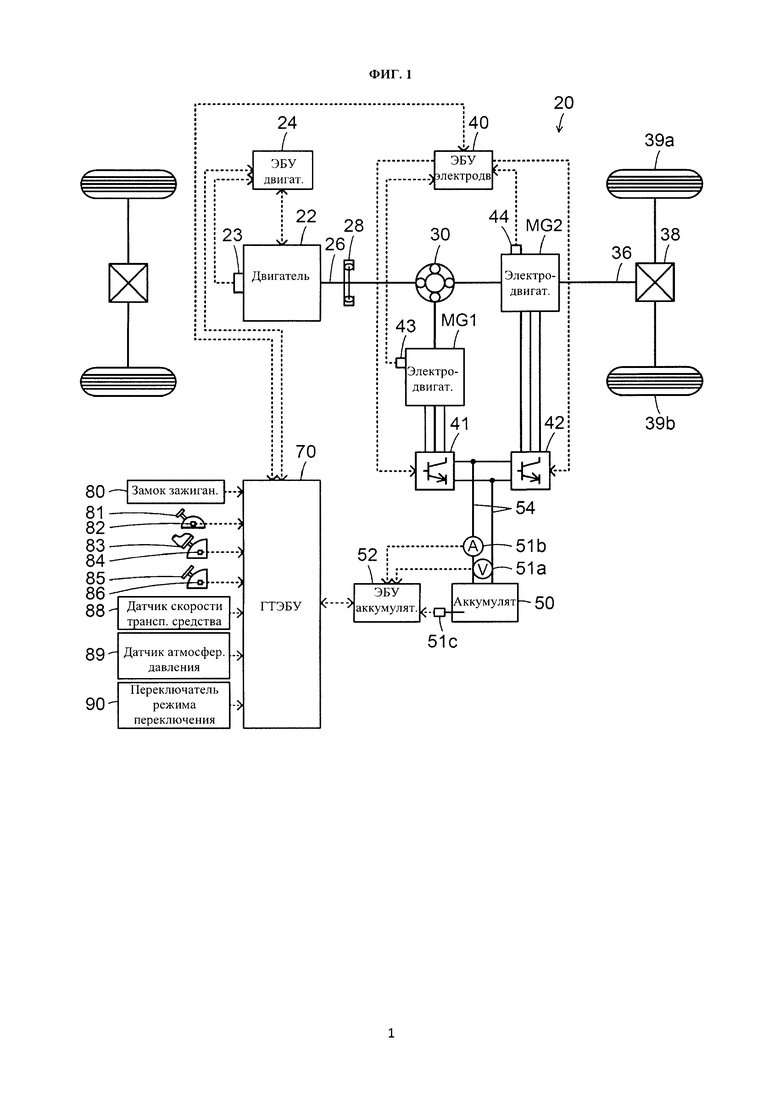
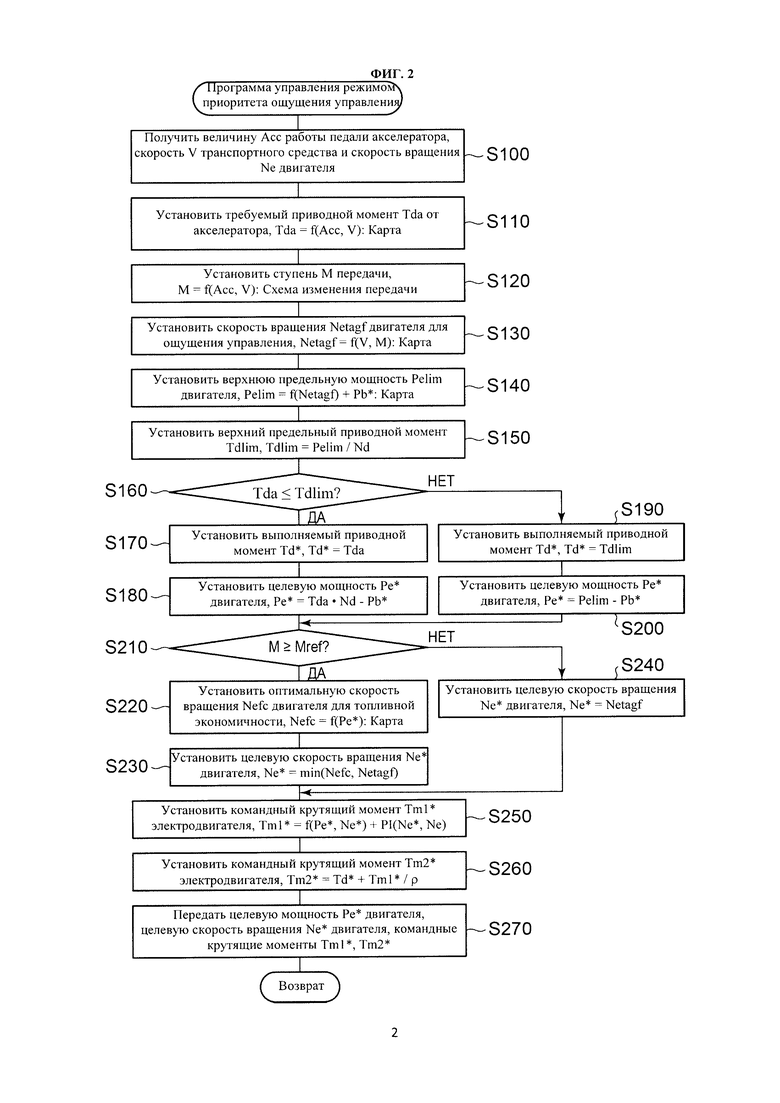
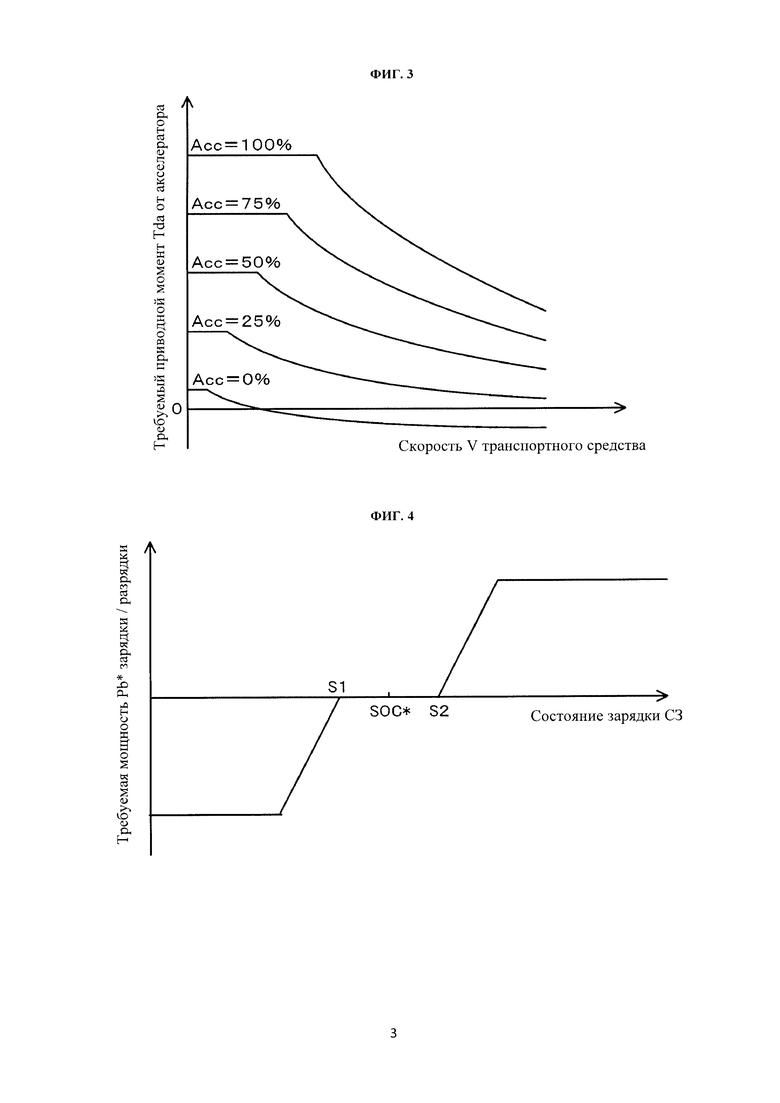
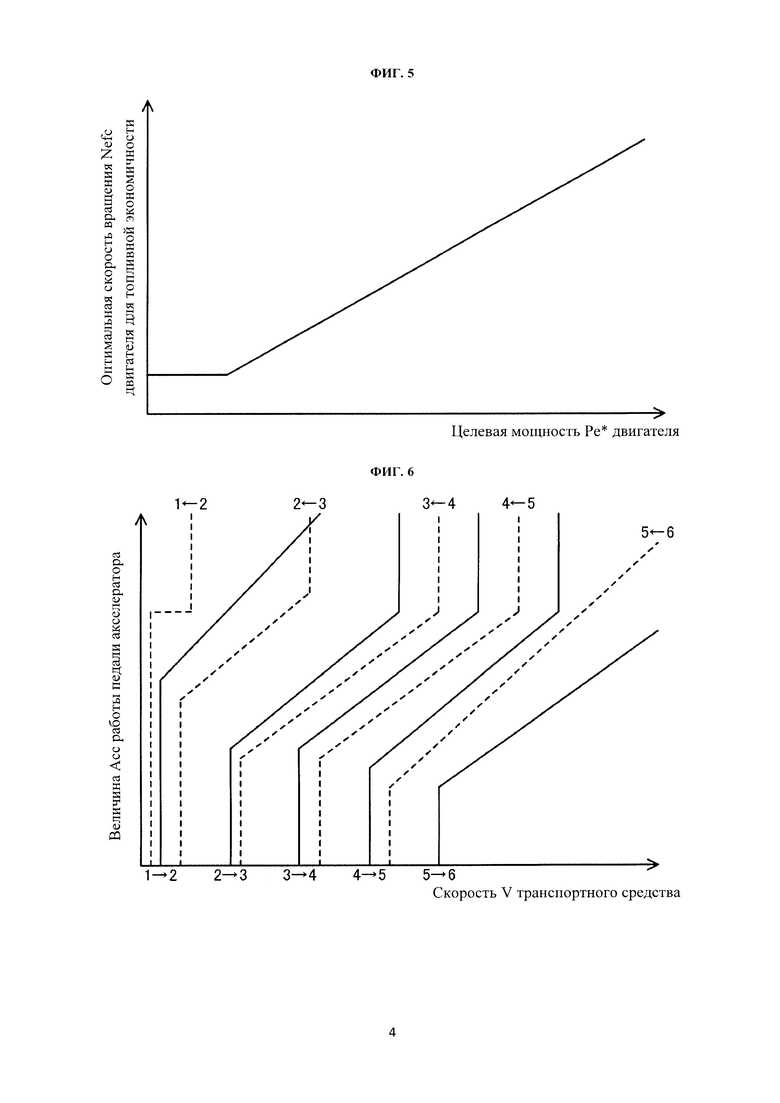
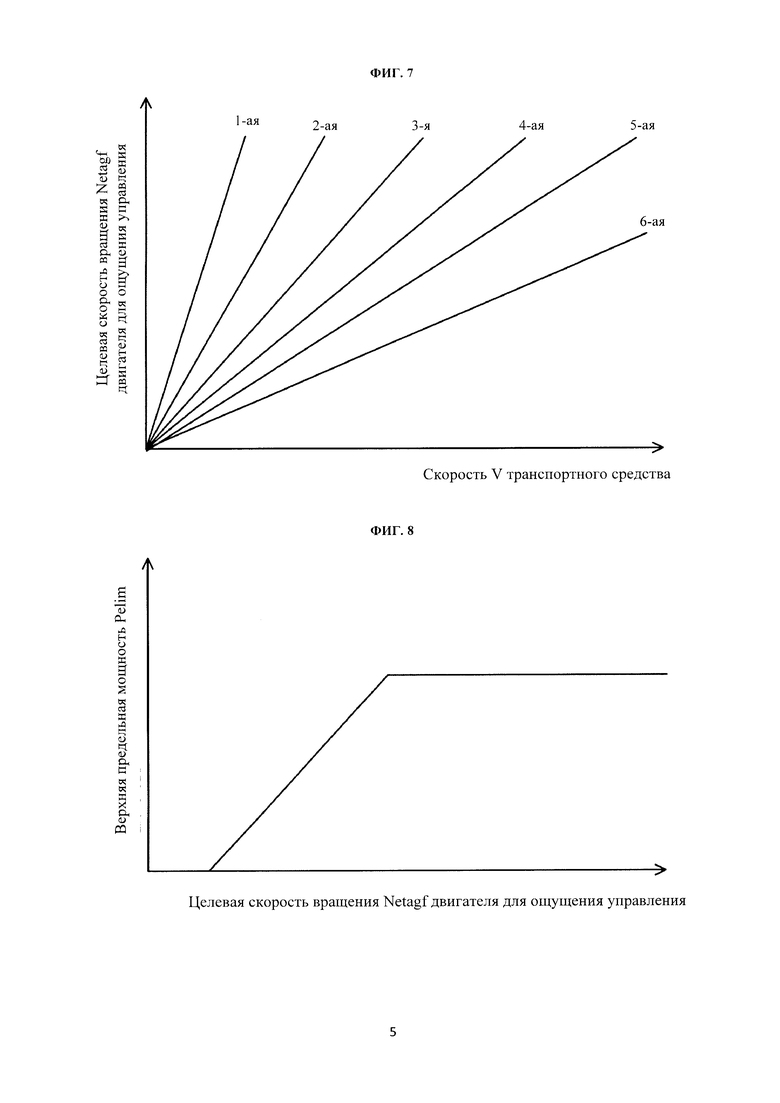
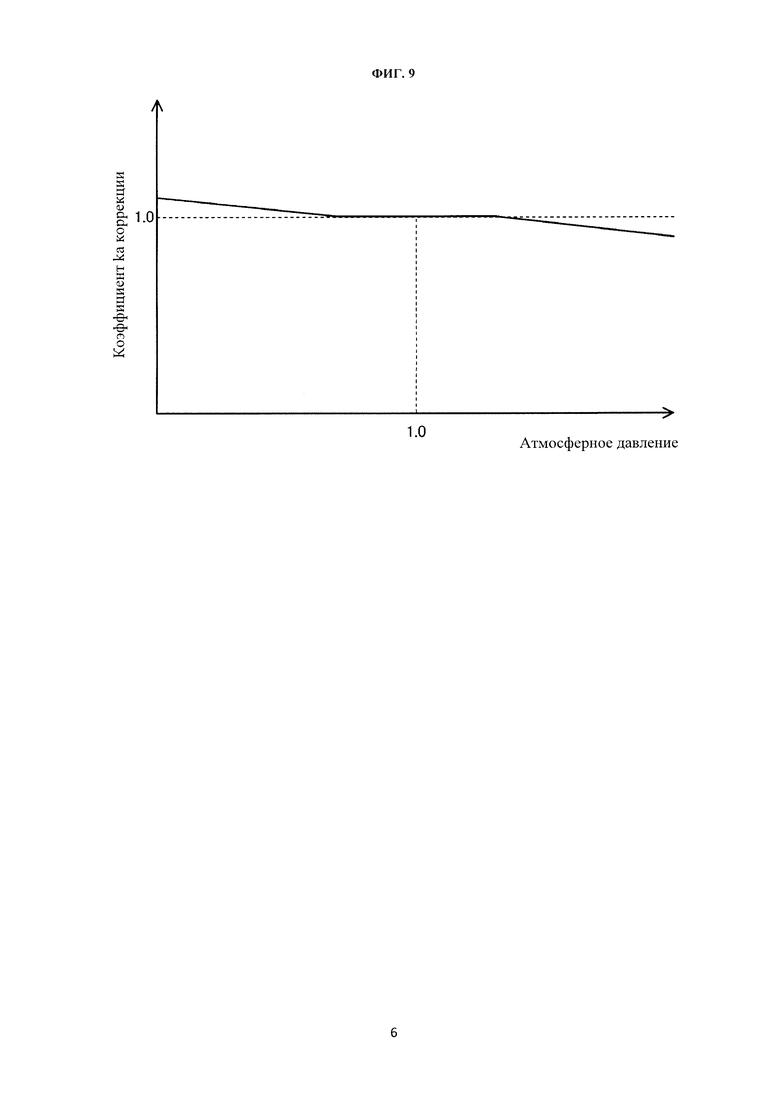
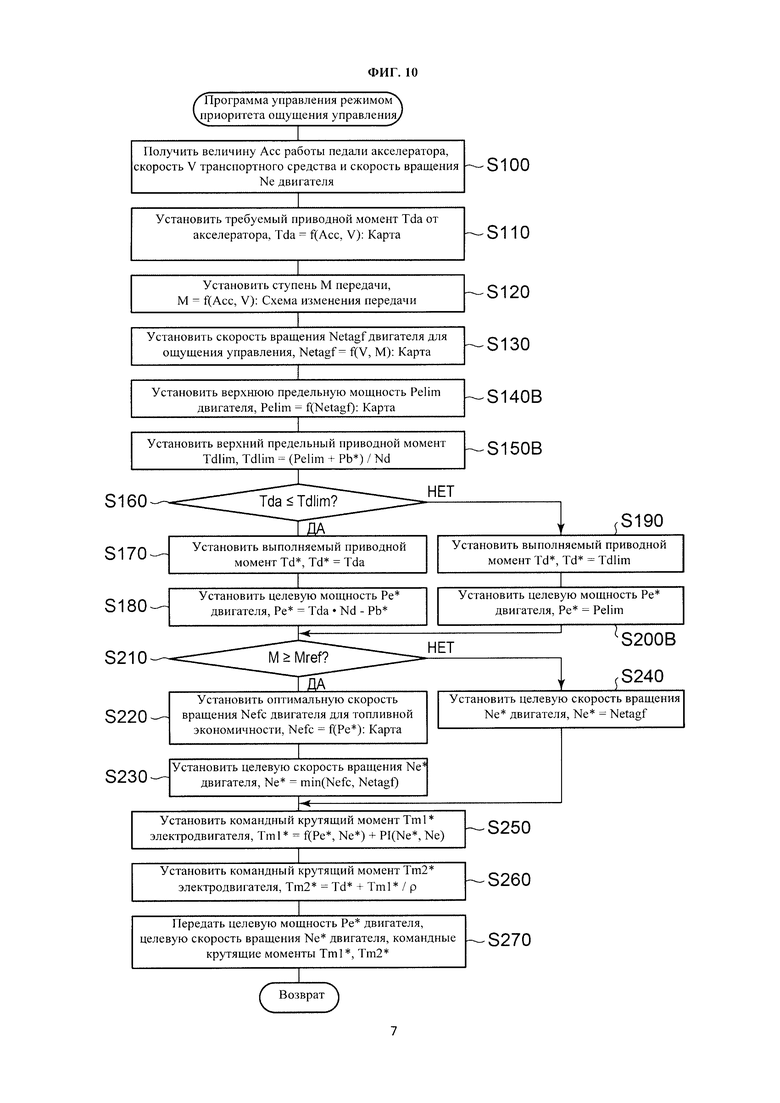
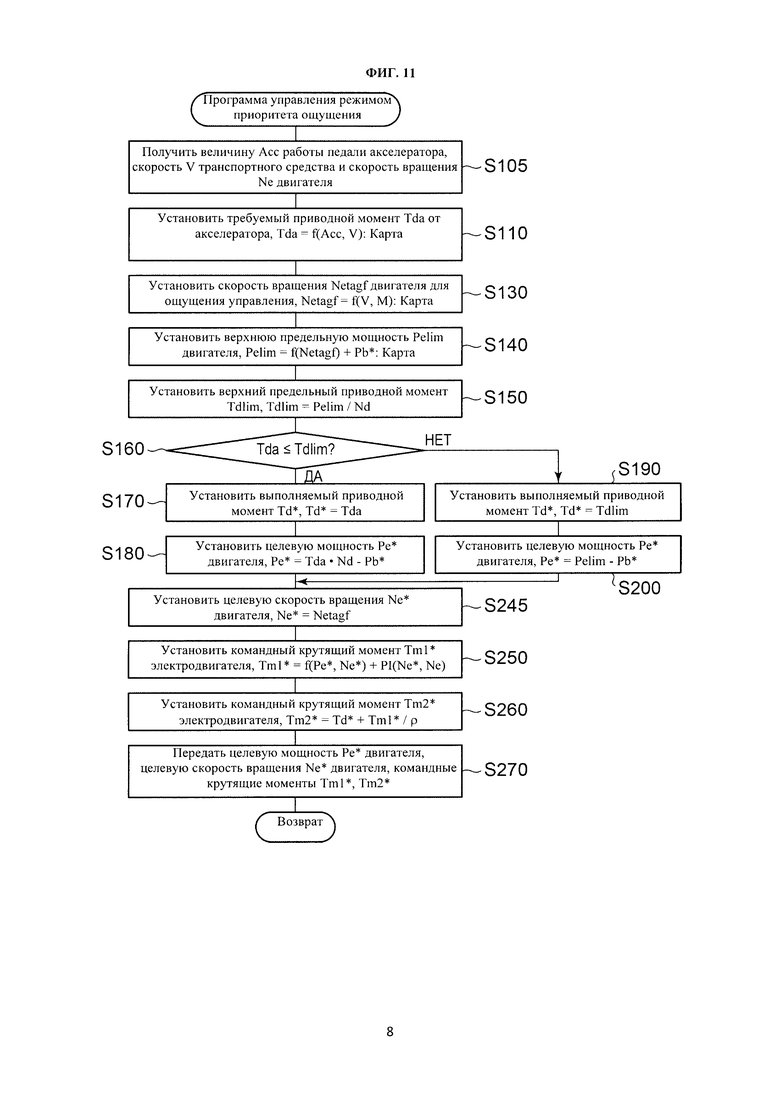
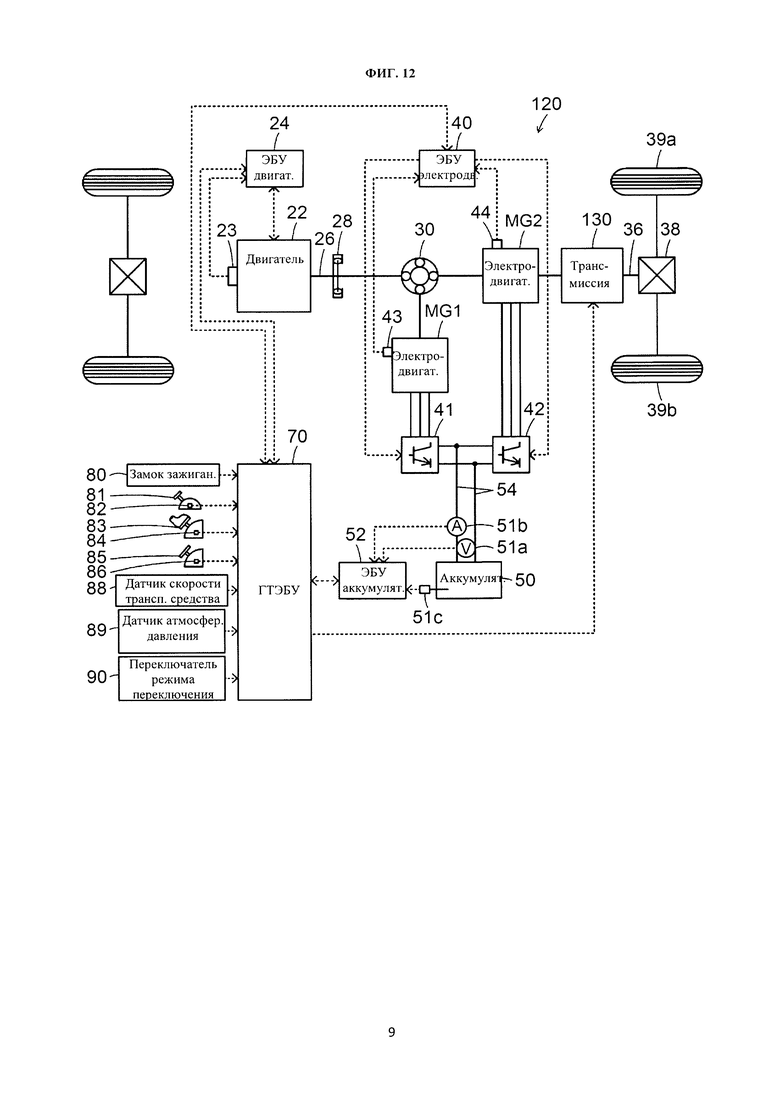
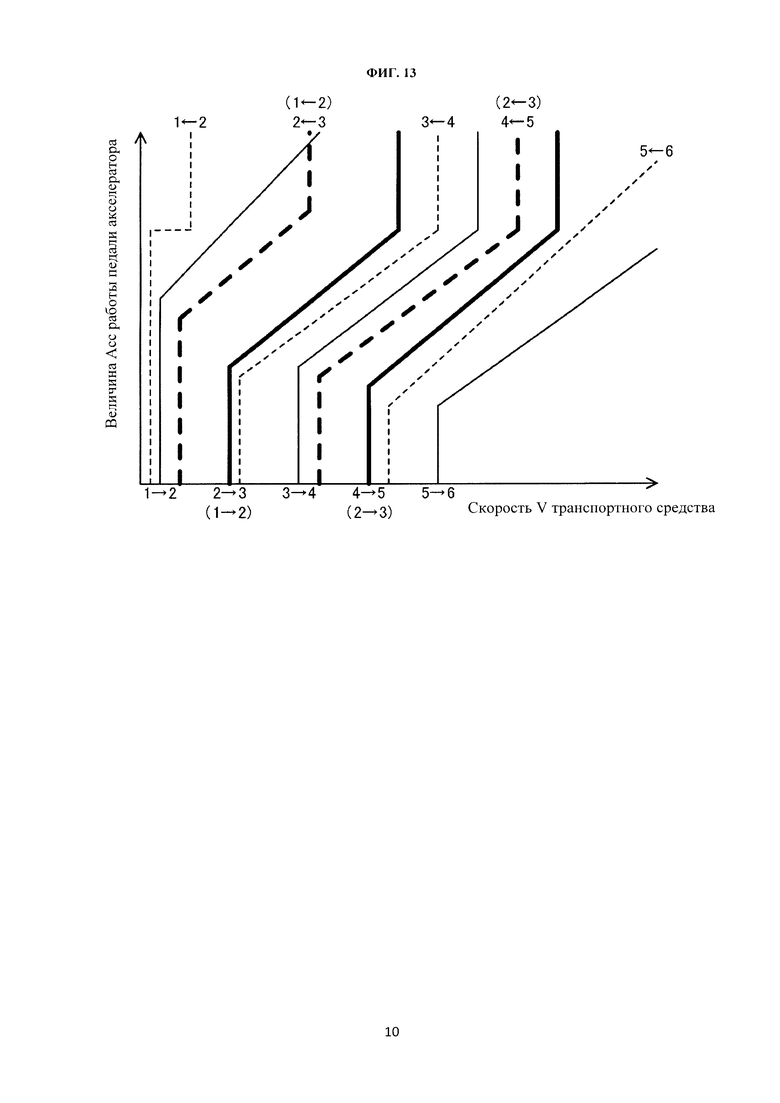
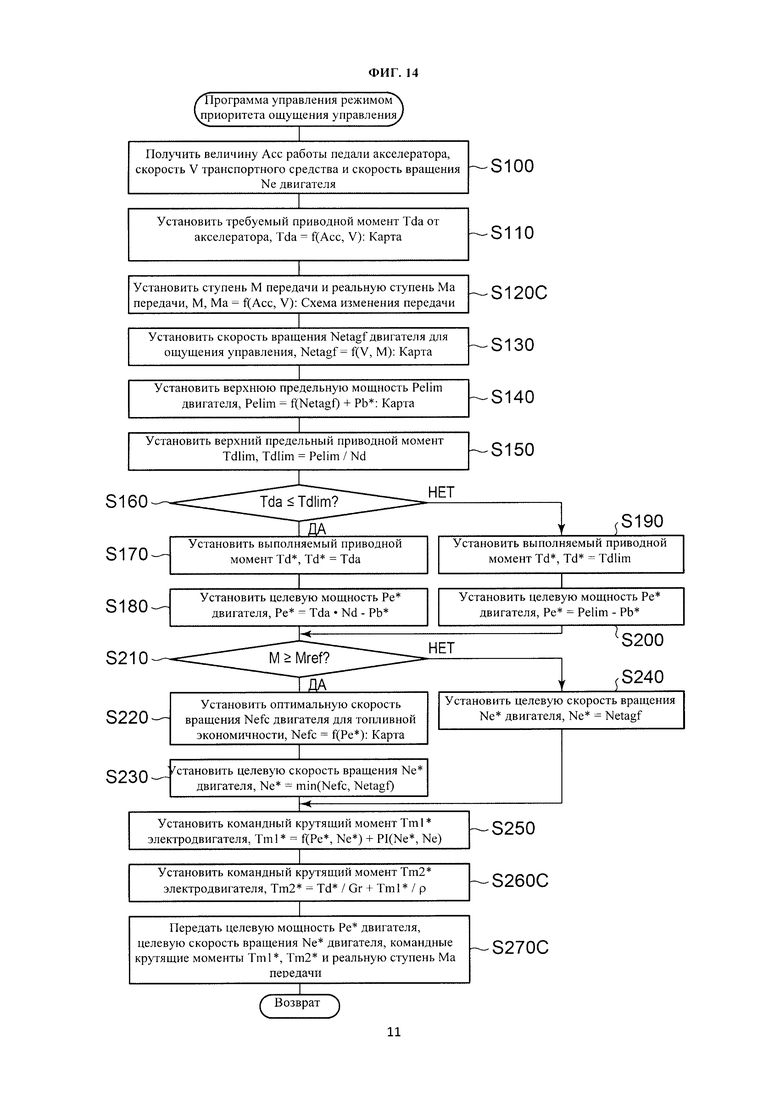
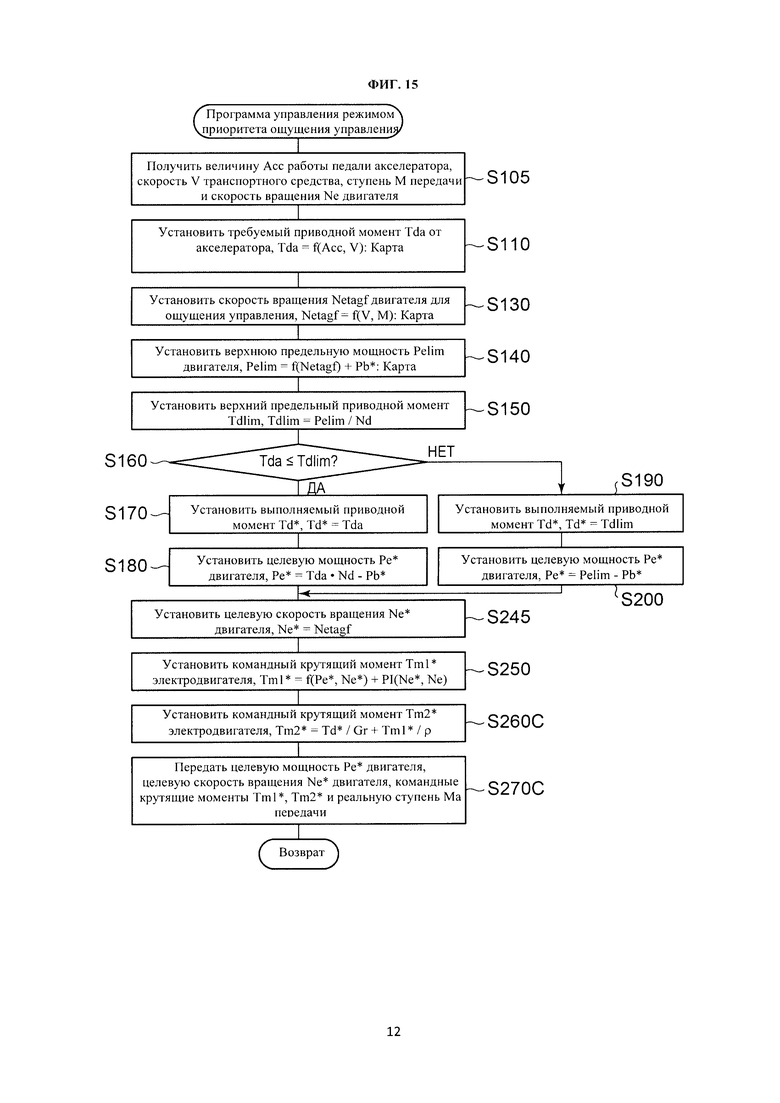
Изобретение относится к гибридным транспортным средствам. Гибридное транспортное средство содержит двигатель, первый и второй электродвигатель, планетарный зубчатый механизм, аккумулятор и электронный блок управления. Блок управления устанавливает приводной момент, в качестве требуемого приводного момента, управления двигателем, первым и вторым электродвигателем и устанавливает скорость вращения двигателя для ощущения управления, основанную на величине работы педали акселератора, скорости транспортного средства и ступени передачи. Блок управления устанавливает верхнюю предельную мощность двигателя и верхний предельный момент приводного вала. Блок управления устанавливает целевую мощность двигателя и управляет двигателем и электродвигателями так, что целевая мощность двигателя выдается из двигателя. Повышается комфорт вождения. 2 н. и 8 з.п. ф-лы, 15 ил.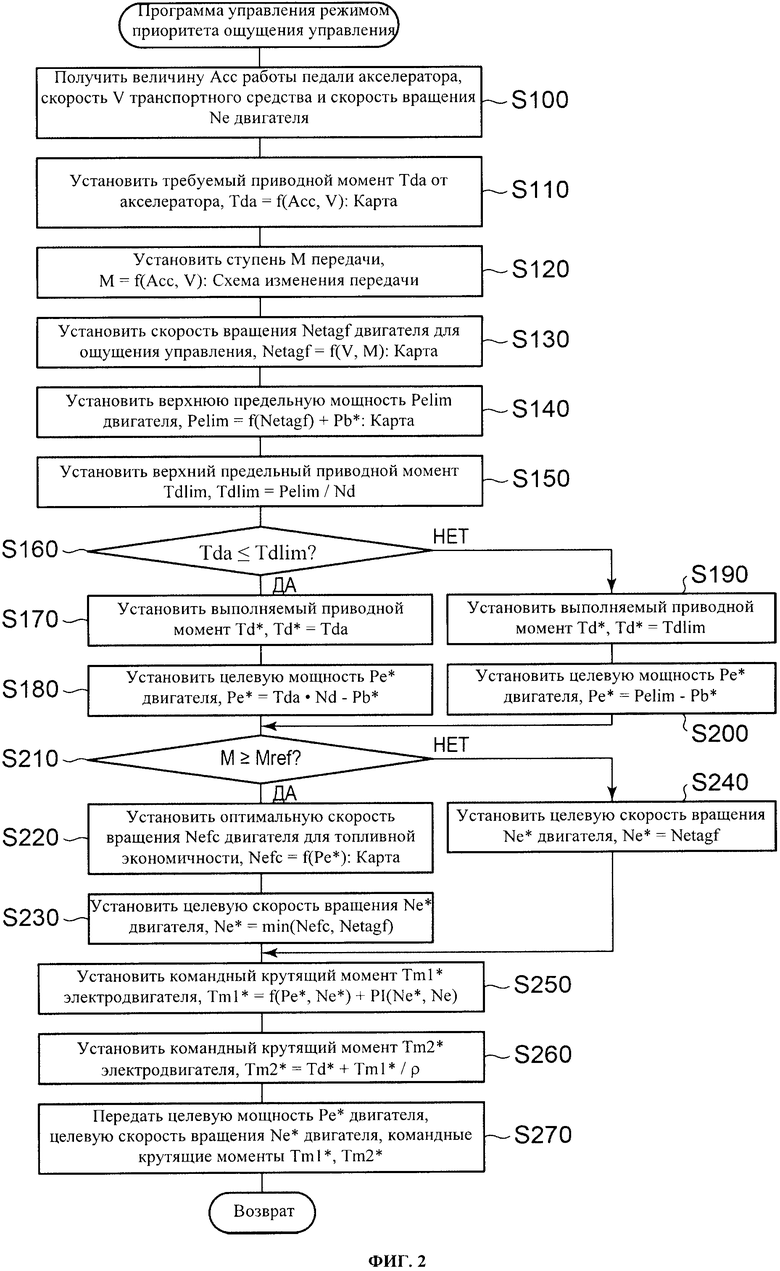
1. Гибридное транспортное средство, содержащее:
двигатель,
первый электродвигатель,
приводной вал, соединенный с осью,
планетарный зубчатый механизм, включающий в себя три вращающихся элемента, при этом три вращающихся элемента соответственно соединены с тремя валами: выходным валом двигателя, вращающимся валом первого электродвигателя и приводным валом,
второй электродвигатель, выполненный с возможностью подачи мощности на приводной вал и съема мощности с приводного вала,
аккумулятор, приспособленный для подачи электроэнергии на первый электродвигатель и второй электродвигатель, и
электронный блок управления, выполненный с возможностью установки приводного момента, который подается на приводной вал, осуществляемой на основе величины работы педали акселератора, задаваемой водителем, и скорости транспортного средства, в качестве требуемого приводного момента,
при этом электронный блок управления выполнен с возможностью управления двигателем, первым электродвигателем и вторым электродвигателем так, чтобы осуществлять движение с использованием требуемого приводного момента,
причем электронный блок управления выполнен с возможностью установки скорости вращения для ощущения управления, при этом скорость вращения для ощущения управления является скоростью вращения двигателя, основанной на величине работы педали акселератора, скорости транспортного средства и ступени передачи,
при этом электронный блок управления выполнен с возможностью
установки верхней предельной мощности двигателя, причем верхняя предельная мощность представляет собой максимальную мощность, которая выдается из двигателя, когда двигатель работает на скорости вращения для ощущения управления,
при этом электронный блок управления выполнен с возможностью установки верхнего предельного приводного момента приводного вала, причем верхний предельный приводной момент представляет собой приводной момент, когда верхняя предельная мощность подается на приводной вал,
при этом электронный блок управления выполнен с возможностью установки целевой мощности двигателя, причем целевая мощность двигателя представляет собой мощность для выдачи либо первой мощности, либо второй мощности на приводной вал, причем первая мощность соответствует меньшему из верхнего предельного приводного момента и требуемого приводного момента, причем вторая мощность является меньшей из третьей мощности и четвертой мощности, при этом третья мощность представляет собой мощность для выдачи верхнего предельного приводного момента на приводной вал, а четвертая мощность представляет собой мощность для выдачи требуемого приводного момента на приводной вал, и
электронный блок управления выполнен с возможностью управления двигателем, первым электродвигателем и вторым электродвигателем таким образом, что целевая мощность двигателя выдается из двигателя.
2. Гибридное транспортное средство по п. 1, в котором
электронный блок управления выполнен с возможностью управления двигателем, первым электродвигателем и вторым электродвигателем таким образом, что первая мощность подается на приводной вал.
3. Гибридное транспортное средство по п. 1 или 2, в котором
электронный блок управления выполнен с возможностью:
установления целевой скорости вращения двигателя, при этом целевая скорость вращения двигателя устанавливается как скорость вращения для ощущения управления, и
управления двигателем для обеспечения его работы на целевой скорости вращения.
4. Гибридное транспортное средство по п. 3, в котором
электронный блок управления выполнен с возможностью:
установки наименьшей из оптимальной скорости вращения двигателя для топливной экономичности и скорости вращения для ощущения управления в качестве целевой скорости вращения двигателя, когда ступень передачи равна или выше порога, при этом оптимальная скорость вращения двигателя для топливной экономичности представляют собой скорость вращения, на которой выдается пятая мощность от двигателя для оптимальной топливной экономичности, причем пятая мощность является мощностью, основанной на требуемом приводном моменте и скорости транспортного средства, и
управления двигателем для обеспечения его работы на целевой скорости вращения.
5. Гибридное транспортное средство по п. 1 или 2, в котором,
когда требуется требуемая мощность зарядки и разрядки, электронный блок управления выполнен с возможностью:
установки мощности, которую получают путем сложения требуемой мощности зарядки и разрядки с максимальной мощностью, в качестве верхней предельной мощности, при этом требуемая мощность зарядки и разрядки является мощностью зарядки и разрядки аккумулятора, а также является мощностью, которая имеет отрицательную величину на стороне зарядки,
установки мощности, которую получают путем вычитания требуемой мощности зарядки и разрядки из верхней предельной мощности, в качестве целевой мощности двигателя, когда целевая мощность двигателя устанавливается таким образом, что верхний предельный приводной момент подается на приводной вал, и
установки мощности, которую получают путем вычитания требуемой мощности зарядки и разрядки из мощности для выдачи требуемого приводного момента на приводной вал, в качестве целевой мощности двигателя, когда целевая мощность двигателя устанавливается таким образом, что требуемый приводной момент подается на приводной вал.
6. Гибридное транспортное средство по п. 1 или 2, в котором,
когда нужна требуемая мощность зарядки и разрядки, электронный блок управления выполнен с возможностью:
установки приводного момента в то время, когда мощность, которую получают путем сложения требуемой мощности зарядки и разрядки с верхней предельной мощностью, подается на приводной вал в качестве соответствующей верхнему предельному приводному моменту, причем требуемая мощность зарядки и разрядки является мощностью зарядки и разрядки аккумулятора, а также является мощностью, которая имеет отрицательную величину на стороне зарядки,
установки верхней предельной мощности в качестве целевой мощности двигателя, когда целевая мощность двигателя устанавливается таким образом, что верхний предельный приводной момент подается на приводной вал, и
установки мощности, которую получают путем вычитания требуемой мощности зарядки и разрядки из мощности для выдачи требуемого приводного момента на приводной вал, в качестве целевой мощности двигателя, когда целевая мощность двигателя устанавливается таким образом, что требуемый приводной момент подается на приводной вал.
7. Гибридное транспортное средство по п. 1 или 2, дополнительно содержащее
режим переключения переключателя, приспособленный для выдачи команд по выбору режима приоритета ощущения управления, в котором ощущение управления является приоритетным над топливной экономичностью, в котором
электронный блок управления выполнен с возможностью:
установки мощности двигателя для выдачи требуемого приводного момента на приводной вал, в качестве целевой мощности двигателя, когда режим приоритета ощущения управления не выбран режимом переключения переключателя, и
управления двигателем таким образом, что двигатель работает на оптимальной скорости вращения двигателя для топливной экономичности и целевая мощность двигателя выдается из двигателя, при этом оптимальная скорость вращения двигателя для топливной экономичности представляет собой скорость вращения двигателя, при которой целевая мощность двигателя, обеспечивающая оптимальную топливную экономичность, выдается из двигателя.
8. Гибридное транспортное средство по п. 1 или 2, в котором
ступень передачи представляет собой виртуальную ступень передачи, которая устанавливается на основе величины работы педали акселератора, задаваемой водителем, а также скорости транспортного средства.
9. Гибридное транспортное средство по п. 1 или 2, дополнительно содержащее:
ступенчатую трансмиссию, которая установлена между приводным валом и планетарным зубчатым механизмом, в котором
ступень передачи является либо ступенью передачи ступенчатой трансмиссии, либо ступенью передачи, которую получают путем сложения виртуальной ступени передачи, установленной на основе величины работы педали акселератора, задаваемой водителем, и скорости транспортного средства, со ступенью передачи ступенчатой трансмиссии.
10. Способ управления приводом гибридного транспортного средства, при этом гибридное транспортное средство включает в себя:
двигатель,
первый электродвигатель,
приводной вал, соединенный с осью,
планетарный зубчатый механизм, включающий в себя три вращающихся элемента, причем три вращающихся элемента соответственно соединены с тремя валами: выходным валом двигателя, вращающимся валом первого электродвигателя и приводным валом,
второй электродвигатель, выполненный с возможностью подачи мощности на приводной вал и съема мощности с приводного вала,
аккумулятор, выполненный с возможностью подачи электроэнергии на первый электродвигатель и второй электродвигатель, и
электронный блок управления,
при этом способ управления включает в себя:
установку электронным блоком управления приводного момента, который подается на приводной вал, на основе величины работы педали акселератора, задаваемой водителем, и скорости транспортного средства в качестве требуемого приводного момента,
осуществляемое электронным блоком управления управление двигателем, первым электродвигателем и вторым электродвигателем таким образом, чтобы осуществлять движение с использованием требуемого приводного момента,
установку электронным блоком управления скорости вращения для ощущения управления, при этом скорость вращения для ощущения управления является скоростью вращения двигателя, основанной на величине работы педали акселератора, скорости транспортного средства и ступени передачи,
установку электронным блоком управления верхней предельной мощности двигателя, при этом верхняя предельная мощность является максимальной мощностью, которая выдается из двигателя, когда двигатель работает на скорости вращения для ощущения управления,
установку электронным блоком управления верхнего предельного приводного момента приводного вала, причем верхний предельный приводной момент представляет собой приводной момент, когда верхняя предельная мощность подается на приводной вал,
установку электронным блоком управления целевой мощности двигателя, причем целевая мощность двигателя представляет собой мощность для выдачи либо первой мощности, либо второй мощности на приводной вал, причем первая мощность соответствует меньшему из верхнего предельного приводного момента и требуемого приводного момента, причем вторая мощность является меньшей из третьей мощности и четвертой мощности, при этом третья мощность представляет собой мощность для выдачи верхнего предельного приводного момента на приводной вал, а четвертая мощность представляет собой мощность для выдачи требуемого приводного момента на приводной вал,
осуществляемое электронным блоком управления управление двигателем, первым электродвигателем и вторым электродвигателем таким образом, что целевая мощность двигателя выдается из двигателя.
| US 2014005867 A1, 02.01.2014 | |||
| WO 2015107381 A1, 23.07.2015 | |||
| JP 2013103578 A, 30.05.2013 | |||
| JP 2014144659 A, 14.08.2014 | |||
| US 2006161328 A1, 20.07.2006 | |||
| ГИБРИДНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2011 |
|
RU2544448C2 |

