ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
1. Область техники, к которой относится изобретение
[0001] Изобретение относится к гибридному транспортному средству и, в частности, к гибридному транспортному средству, включающему в себя двигатель внутреннего сгорания (далее ДВС), первый электрический двигатель, второй электрический двигатель и планетарный зубчатый механизм.
2. Описание предшествующего уровня техники
[0002] Обычно предлагается гибридное транспортное средство, включающее в себя муфту одностороннего вращения, которая передает момент, когда ДВС вращается в прямом направлении, и которая блокируется, когда ДВС намеревается вращаться в обратном направлении (см., например, публикацию японской патентной заявки №2002-012046 (JP 2002-012046 А). В этом гибридном транспортном средстве при отрицательной скорости вращения ДВС делается определение, что имеется неисправность в муфте одностороннего вращения. Гибридное транспортное средство включает в себя планетарную передачу и тяговый электрический двигатель. Планетарная передача включает в себя кольцевую шестерню, соединенную с ведущим колесом через зубчатый механизм или т.п., а также солнечную шестерню, соединенную с электрическим двигателем-генератором, и водило, соединенное с выходным валом ДВС. Тяговый электрический двигатель соединен с зубчатым механизмом, подключенным к кольцевой шестерне. Муфта одностороннего вращения соединена с выходным валом ДВС. В этом транспортном средстве, когда из двигателя-генератора выдается крутящий момент в обратном направлении вращения ДВС, в состоянии, при котором работа ДВС остановлена, крутящий момент поддерживается муфтой одностороннего вращения, так что можно выдавать крутящий момент в качестве противодействующей силы на кольцевую шестерню. С помощью такого функционирования транспортное средство движется посредством крутящего момента, выдаваемого электрическим двигателем-генератором, и посредством крутящего момента, выдаваемым приводным электрическим двигателем.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0003] Как правило, датчик, который определяет скорость вращения ДВС, не в состоянии определить, является ли направление вращения положительным или отрицательным, так что необходимо использовать датчик, который способен определить, является ли направление вращения положительным или отрицательным для того, чтобы обнаружить, что скорость вращения ДВС имеет отрицательное значение, как и в случае описанного выше гибридного транспортного средства. Если используется такой датчик, стоимость увеличивается.
[0004] Изобретением предложено гибридное транспортное средство, которое с дополнительной точностью правильно определяет неисправность в механизме ограничения вращения, например, муфте одностороннего вращения, планетарной зубчатой передаче и пр.
[0005] Одним из объектов настоящего изобретения является гибридное транспортное средство. Гибридное транспортное средство включает в себя двигатель внутреннего сгорания (ДВС), первый электрический двигатель, второй электрический двигатель, планетарную зубчатую передачу, механизм ограничения вращения, аккумулятор и электронный блок управления. Планетарная зубчатая передача включает в себя планетарную передачу, а вращающиеся элементы планетарной зубчатой передачи соединены с ДВС, первым электрическим двигателем, вторым электрическим двигателем и ведущим валом, соединенным с мостом транспортного средства. Механизм ограничения вращения сконфигурирован для ограничения вращения ДВС. Аккумулятор сконфигурирован для обмена электроэнергией с первым электрическим двигателем и вторым электрическим двигателем. Электронный блок управления сконфигурирован для i) управления первым электрическим двигателем, а также вторым электрическим двигателем в режиме движения с двумя электрическими двигателями, в котором гибридное транспортное средство движется с использованием крутящего момента первого электрического двигателя и второго электрического двигателя в состоянии, при котором вращение ДВС ограничено, таким образом, что требуемый крутящий момент для ведущего вала подается на ведущий вал от первого электрического двигателя и второго электрического двигателя, и ii) определения в режиме движения с двумя электрическими двигателями наличия неисправности либо в планетарной зубчатой передаче, либо в механизме ограничения вращения, если расхождение между первой скоростью вращения ведущего вала, вычисленной по скорости вращения первого электрического двигателя в период времени, когда вращение ДВС ограничено, и второй скоростью вращения ведущего вала, вычисленной по скорости вращения второго электрического двигателя, больше порогового значения.
[0006] В описанном выше гибридном транспортном средстве, когда гибридное транспортное средство движется в режиме движения с двумя электрическими двигателями, в котором гибридное транспортное средство движется с использованием крутящего момента первого электрического двигателя и второго электрического двигателя в состоянии, при котором вращение ДВС ограничено, скорость вращения (первая скорость вращения) ведущего вала рассчитывается по скорости вращения первого электрического двигателя в период времени, когда вращение ДВС ограничено, и скорость вращения (вторая скорость вращения) ведущего вала вычисляется по скорости вращения второго электрического двигателя. Если расхождение между первой скоростью вращения и второй скоростью вращения больше порогового значения, делается определение, что имеется неисправность либо в планетарной зубчатой передаче, либо механизме ограничения вращения, который ограничивает вращение ДВС. Когда механизм ограничения вращения или механизм планетарной передачи работает нормально, первая скорость вращения и вторая скорость вращения совпадают друг с другом в пределах допустимого диапазона ошибок датчика и пр. Поэтому, когда расхождение между первой скоростью вращения и второй скоростью вращения больше порогового значения, установленного заранее как значение, близкое к верхнему пределу допустимого диапазона, может быть определено, что имеется неисправность в механизме ограничения вращения или планетарной зубчатой передаче. Таким образом, можно с дополнительной точностью правильно определить неисправность в механизме ограничения вращения или планетарной зубчатой передаче. Расхождение между первой скоростью вращения и второй скоростью вращения означает абсолютное значение разности между первой скоростью вращения и второй скоростью вращения.
[0007] В сконфигурированном таким образом гибридном транспортном средстве планетарная зубчатая передача может включать в себя единую шестеренчатую планетарную передачу. Единая шестеренчатая планетарная передача может включать в себя солнечную шестерню, соединенную с первым электрическим двигателем, кольцевую шестерню, соединенную с ведущим валом, и водило, соединенное с множеством ведущих шестерен и соединенное с ДВС. Электронный блок управления может быть сконфигурирован для определения наличия неисправности в механизме ограничения вращения или ведущих шестернях, если первая скорость вращения выше второй скорости вращения на пороговое значение или более.
[0008] В гибридном транспортном средстве, сконфигурированном, чтобы содержать единую шестеренчатую планетарную передачу, механизм ограничения вращения может представлять собой муфту одностороннего вращения, которая обеспечивает прямое вращение ДВС и не допускает обратного вращения ДВС. Электронный блок управления может быть сконфигурирован так, чтобы в то время, когда электронный блок управления запускает ДВС после определения того, что имеется неисправность либо в механизме ограничения вращения, либо в ведущих шестернях, i) определить, что имеется неисправность в муфте одностороннего вращения, когда разность между скоростью вращения, вычисленная исходя из скорости вращения первого электрического двигателя и скорости вращения второго электрического двигателя, и скоростью вращения ДВС, меньше или равна заранее заданного значения разности, и ii) определить, что имеется неисправность в ведущих шестернях, когда эта разность больше заранее заданного значения разности.
[0009] В описанном выше гибридном транспортном средстве в случае неисправности в муфте одностороннего вращения (неисправности в функции сцепления), первая скорость вращения увеличивается, так как ДВС вращается в обратном направлении вращения в режиме движения с двумя электрическими двигателями; тем не менее, ДВС, как правило, вращается в прямом направлении вращения при запуске ДВС, при этом скорость вращения ДВС обычно увеличивается. По этой причине разность между скоростью вращения ДВС и скоростью вращения ДВС, рассчитанной исходя из скорости вращения первого электрического двигателя и скорости вращения второго электрического двигателя, находится в пределах допустимого диапазона (заранее заданного значения разности) из-за ошибок датчика и пр. С другой стороны, в случае неисправности (неисправности при холостом ходе) в ведущих шестернях, первая скорость вращения увеличивается из-за холостого хода ведущих шестерен в режиме движения с двумя электрическими двигателями, скорость вращения ДВС обычно не увеличивается также из-за холостого хода ведущих шестерен при запуске ДВС. По этой причине разность между скоростью вращения ДВС и скоростью вращения ДВС, рассчитанной исходя из скорости вращения первого электрического двигателя и скорости вращения второго электрического двигателя, выходит за пределы допустимого диапазона (заранее заданного значения разности). На основании этого факта неисправность в муфте одностороннего вращения и неисправность в ведущих шестернях отличаются друг от друга. Таким образом, можно с дополнительной точностью обнаружить неисправность в муфте одностороннего вращения и неисправность в ведущих шестернях.
[0010] В этом случае электронный блок управления может быть сконфигурирован, чтобы i) при определении неисправности в муфте одностороннего вращения обеспечить гибридный режим и режим движения с одним электрическим двигателем, причем гибридный режим представляет собой режим, в котором гибридное транспортное средство движется с использованием мощности ДВС и крутящего момента первого электрического двигателя и второго электрического двигателя, при этом режим движения с двумя электрическими двигателями запрещен, причем режим движения с одним электрическим двигателем представляет собой режим, в котором гибридное транспортное средство движется, используя крутящий момент только второго электрического двигателя, в то время как ДВС находится в состоянии остановки вращения, и ii) при определении неисправности в ведущих шестернях обеспечить режим движения с одним электрическим двигателем, в то время как режим движения с двумя электрическими двигателями и гибридный режим запрещены. Таким образом, гибридное транспортное средство имеет возможность двигаться без поломки других компонентов в случае неисправности в муфте одностороннего вращения (неисправности в функции сцепления) или неисправности в ведущих шестернях (неисправности холостого хода).
[0011] В гибридном транспортном средстве, сконфигурированном, чтобы включать в себя единую шестеренчатую планетарную передачу, планетарная зубчатая передача может включать в себя редуктор, соединенный со вторым электрическим двигателем и кольцевой шестерней. Электронный блок управления может быть сконфигурирован так, чтобы определить, что имеется неисправность в редукторе, если первая скорость вращения ниже второй скорости вращения на пороговое значение или более. Таким образом, можно определить неисправность редуктора, расположенного в планетарной зубчатой передаче.
[0012] В этом случае, когда электронный блок управления определяет, что имеется неисправность в редукторе, электронный блок управления может быть сконфигурирован так, чтобы запретить режим движения, за исключением режима движения с ДВС и электрическим двигателем и режима движения с одним первым электрическим двигателем. Режим движения с ДВС и электрическим двигателем может представлять собой режим, в котором гибридное транспортное средство движется, используя мощность ДВС и крутящий момент первого электрического двигателя. Режим движения с одним первым электрическим двигателем может представлять собой режим, в котором гибридное транспортное средство движется, используя только крутящий момент первого электрического двигателя. Таким образом, гибридное транспортное средство имеет возможность двигаться без поломки других компонентов в случае неисправности в редукторе.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0013] Признаки, преимущества, а также техническое и промышленное значение примеров осуществления настоящего изобретения будут описаны ниже со ссылками на прилагаемые чертежи, на которых одинаковые ссылочные позиции обозначают одинаковые элементы, и на которых:
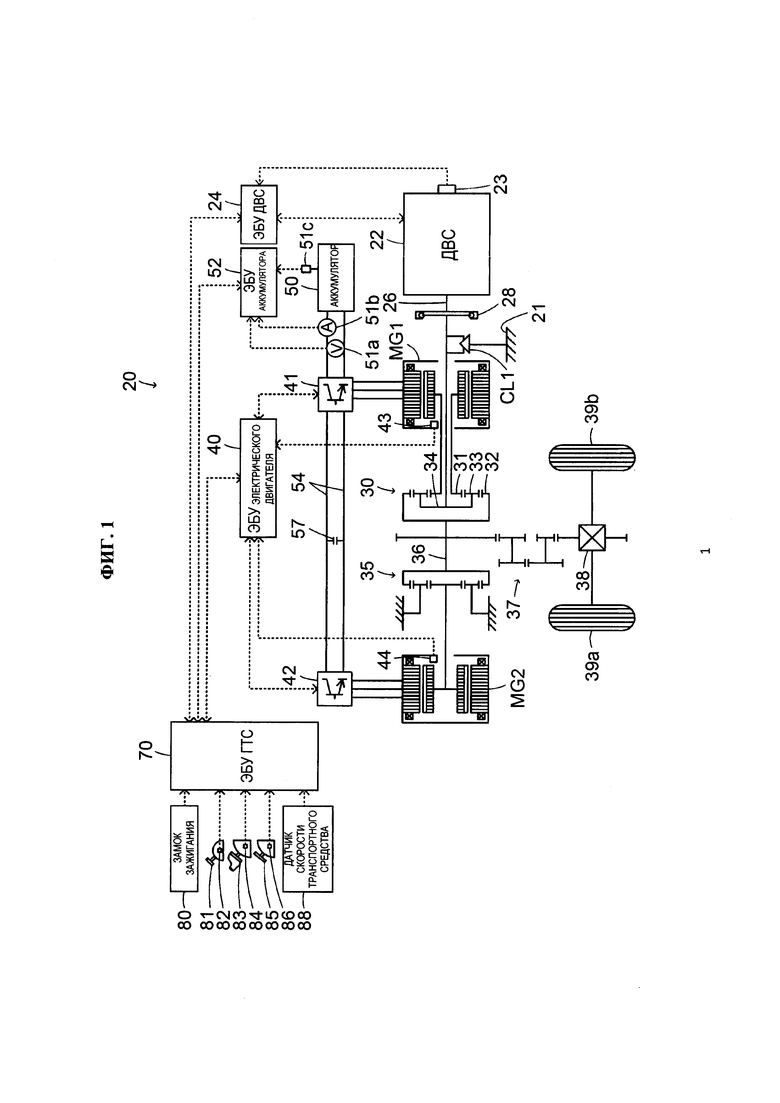
Фиг. 1 представляет собой изображение, на котором схематически показана конфигурация гибридного транспортного средства в соответствии с первым примером осуществления настоящего изобретения;
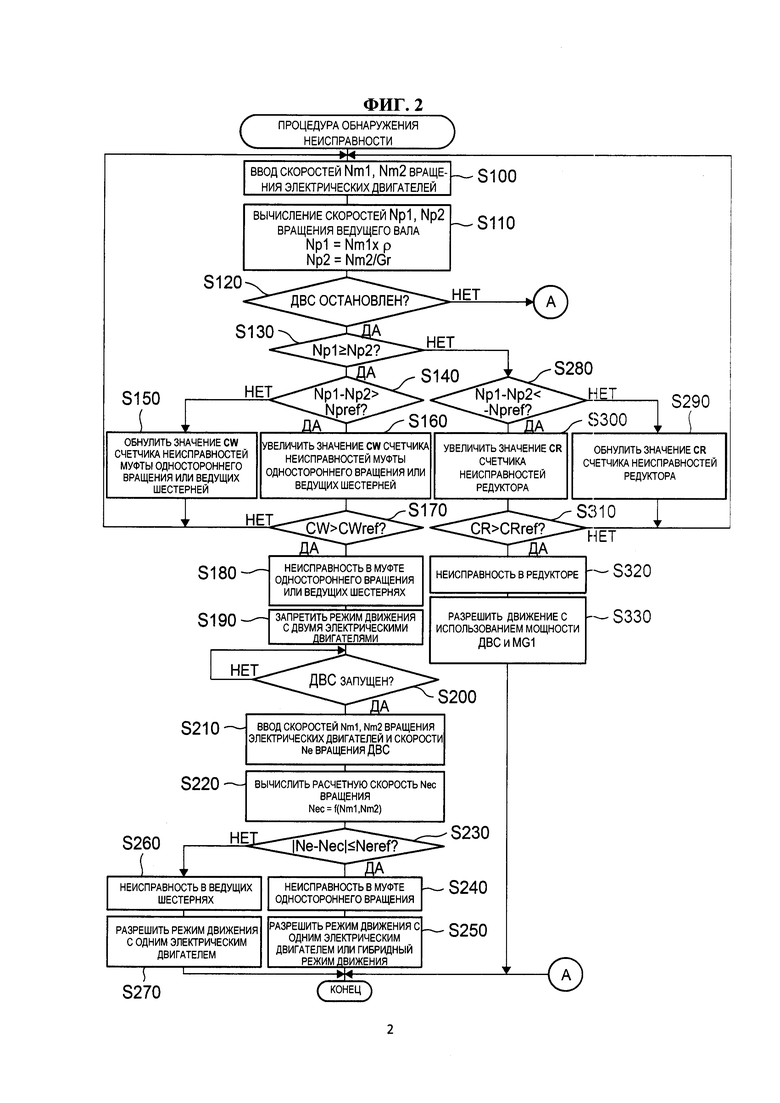
Фиг. 2 представляет собой блок-схему, которая показывает пример процедуры обнаружения неисправности, выполняемой в режиме движения с двумя электрическими двигателями;
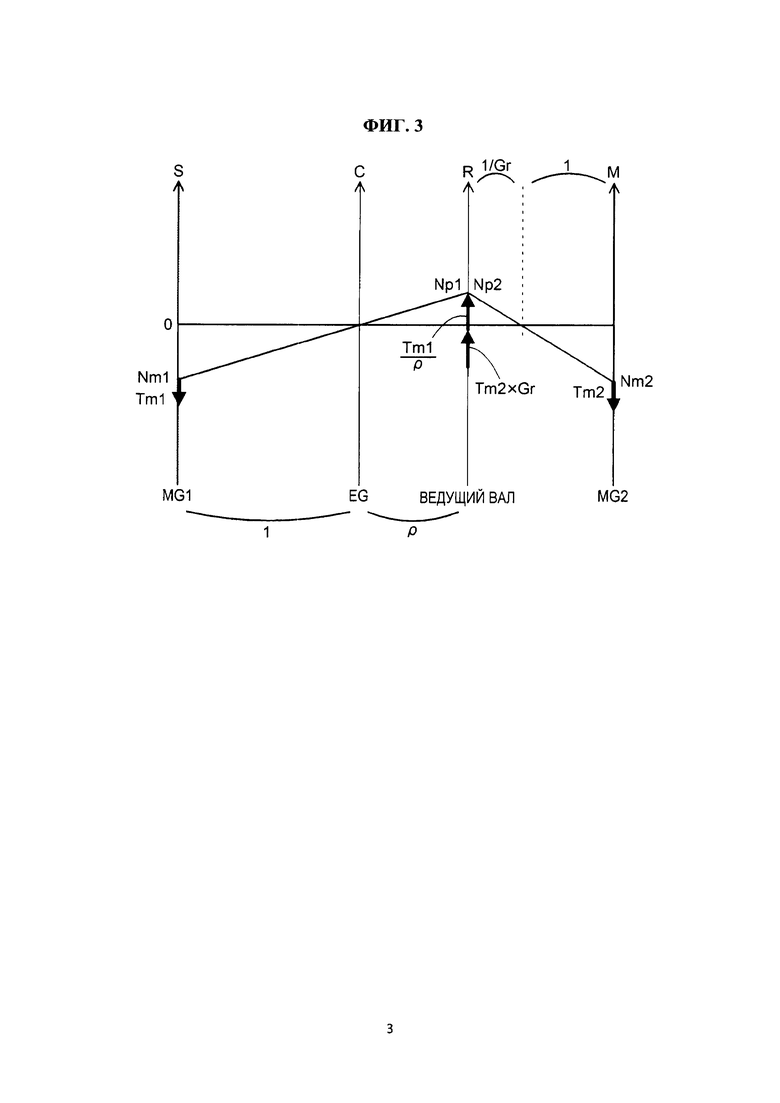
Фиг. 3 представляет собой пример номограммы в то время, когда гибридное транспортное средство движется в режиме движения с двумя электрическими двигателями;
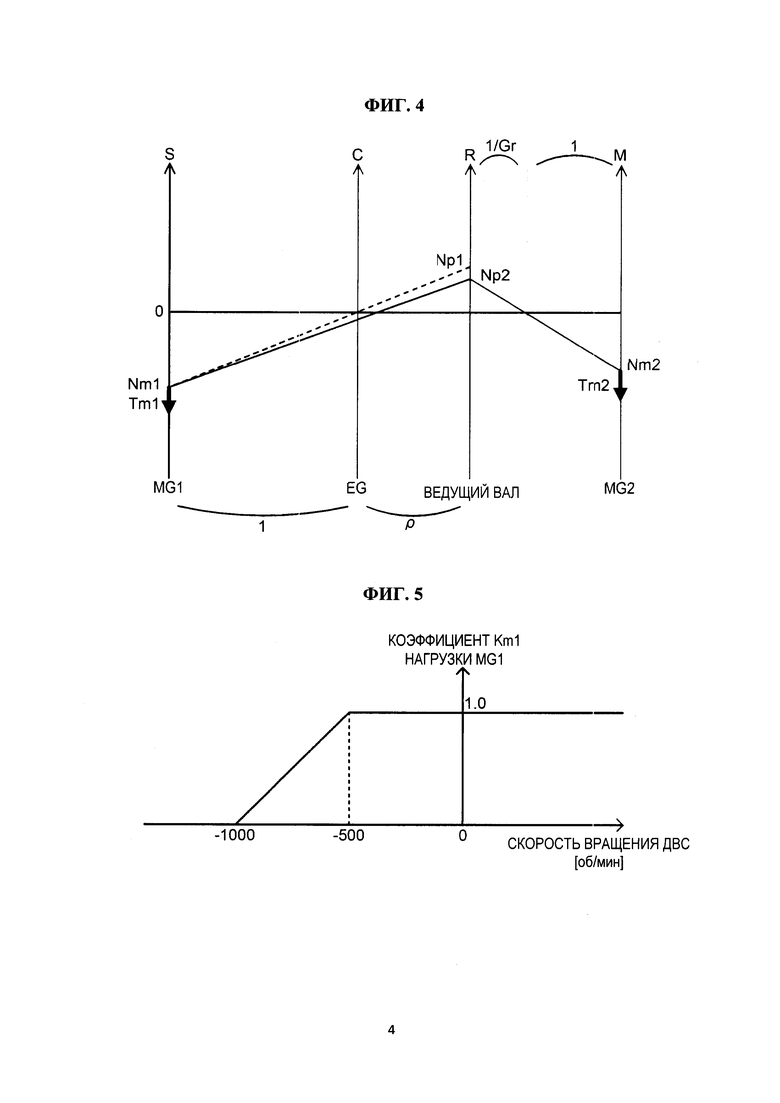
Фиг. 4 представляет собой пример номограммы в то время, когда имеется неисправность (неисправность расцепления) в функции сцепления муфты одностороннего вращения;
Фиг. 5 представляет собой пример зависимости коэффициента нагрузки электрического двигателя от скорости вращения ДВС;
Фиг. 6 представляет собой пример номограммы во время запуска ДВС;
Фиг. 7 представляет собой пример номограммы при неисправности в редукторе;
Фиг. 8 представляет собой конфигурацию гибридного транспортного средства в соответствии со вторым примером осуществления изобретения;
Фиг. 9 представляет собой конфигурацию гибридного транспортного средства в соответствии с третьим вариантом осуществления изобретения;
Фиг. 10 представляет собой пример номограммы в то время, когда гибридное транспортное средство движется в режиме движения с двумя электрическими двигателями в состоянии, в котором муфта установлена в сцепленное состояние, а фиксатор установлен в расцепленном состоянии;
Фиг. 11 представляет собой пример номограммы в то время, когда гибридное транспортное средство движется в режиме движения с двумя электрическими двигателями в состоянии, в котором муфта установлена в расцепленное состояние, а фиксатор установлен в сцепленное состояние;
Фиг. 12 представляет собой пример номограммы в то время, когда возникает неисправность в муфте одностороннего вращения в состоянии, показанном на фиг. 10;
Фиг. 13 представляет собой пример номограммы в то время, когда возникает неисправность в муфте одностороннего вращения в состоянии, показанном на фиг. 11.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[0014] Ниже будут описаны примеры осуществления настоящего изобретения.
[0015] Фиг. 1 представляет собой конфигурацию гибридного транспортного средства 20 в соответствии с первым примером осуществления настоящего изобретения.
[0016] Как показано на фиг. 1, гибридное транспортное средство 20 в соответствии с первым примером осуществления включает в себя ДВС 22, планетарную передачу 30, муфту CL1 одностороннего вращения, электрические двигатели MG1, MG2, инверторы 41, 42, аккумулятор 50 и электронный блок 70 управления гибридным транспортным средством (далее именуемый ЭБУ ГТС).
[0017] ДВС 22 сконфигурирован в виде двигателя внутреннего сгорания, который выдает энергию путем использования бензина, легкого масла и пр. в качестве топлива. ДВС 22 работает под управлением, которое выполняется с помощью электронного блока управления 24 ДВС (далее именуемого как ЭБУ ДВС).
[0018] Хотя это и не показано на чертеже, ЭБУ 24 ДВС представляет собой микропроцессор, который в основном включает в себя центральный процессор, и который дополнительно включает в себя ПЗУ, ОЗУ, входные/выходные порты и коммуникационный порт в дополнение к центральному процессору. ПЗУ хранит программу обработки. ОЗУ временно хранит данные.
[0019] Сигналы различных датчиков, которые необходимы для выполнения управления работой ДВС 22, вводятся в ЭБУ 24 ДВС через входной порт. Часть сигналов, которые поступают от различных датчиков, включает в себя сигнал угла θcr поворота коленчатого вала и сигнал степени ТН открытия дроссельной заслонки. Сигнал угла θcr поворота коленчатого вала поступает от датчика 23 положения коленчатого вала, который определяет угол поворота коленчатого вала 26 ДВС 22. Сигнал степени ТН открытия дроссельной заслонки поступает от датчика положения дроссельной заслонки, который определяет положение дроссельной заслонки.
[0020] Различные сигналы управления для управления работой ДВС 22 подаются из ЭБУ 24 ДВС через выходной порт. Различные сигналы управления включают в себя сигнал управления движением, который выдается на электрический привод дроссельной заслонки, который регулирует положение дроссельной заслонки, сигнал управления движением, который выдается на клапан впрыска топлива, а также сигнал управления движением, который выдается на катушку зажигания, интегрированную со свечой зажигания.
[0021] ЭБУ 24 ДВС соединен с ЭБУ 70 ГТС через коммуникационный порт. ЭБУ 24 ДВС выполняет управление работой ДВС 22 в ответ на управляющий сигнал от ЭБУ 70 ГТС.ЭБУ 24 ДВС, при необходимости, выводит данные о рабочем состоянии ДВС 22 ЭБУ 70 ГТС.ЭБУ 24 ДВС вычисляет угловую скорость вращения и частоту вращения коленчатого вала 26, то есть угловую скорость ωne вращения и число Ne оборотов ДВС 22, на основе сигнала угла θcr поворота коленчатого вала от датчика 23 положения коленчатого вала.
[0022] Планетарная передача 30 представляет собой механизм единой шестеренчатой планетарной передачи. Планетарная передача 30 включает в себя солнечную шестерню 31, кольцевую шестерню 32, множество ведущих шестерен 33 и водило 34. Солнечная шестерня 31 представляет собой внешнюю шестерню. Кольцевая шестерня 32 является внутренней шестерней. Множество ведущих шестерен 33 находятся в зацеплении с солнечной шестерней 31 и кольцевой шестерней 32. Водило 34 поддерживает множество шестерен 33 таким образом, что каждая ведущая шестерня 33 выполнена с возможностью поворота и вращения. Ротор электрического двигателя MG1 соединен с солнечной шестерней 31. Ведущий вал 36 соединен с кольцевой шестерней 32. Ведущий вал 36 соединен с ведущими колесами 39а, 39b с помощью дифференциальной передачи 38 и зубчатого механизма 37. Коленчатый вал 26 ДВС 22 соединен с водилом 34 через демпфер 28. Смазочное масло подается в планетарную передачу 30 с помощью масляного насоса (не показан). Смазочное масло также подается на ведущие шестерни 33 путем вращения водила 34 и т.п.
[0023] Муфта CL1 одностороннего вращения соединена с водилом 34 и также соединена с кожухом 21, закрепленным на корпусе транспортного средства. Муфта CL1 одностороннего вращения обеспечивает вращение водила 34 только в прямом направлении вращения ДВС 22 относительно кожуха 21.
[0024] Электрический двигатель MG1 представляет собой, например, синхронный электрический двигатель-генератор. Как было описано выше, ротор электрического двигателя MG1 соединен с солнечной шестерней 31 планетарной передачи 30. Электрический двигатель MG2 представляет собой, например, синхронный электрический двигатель-генератор. Ротор электрического двигателя MG2 соединен с ведущим валом 36 через редуктор 35. Инверторы 41, 42 подключены к линиям 54 электропитания вместе с аккумулятором 50. Сглаживающий конденсатор 57 соединен с линиями 54 электропитания. Каждый электрический двигатель MG1, MG2 приводится во вращение при управлении переключением множества коммутационных элементов (не показаны) одного из соответствующих инверторов 41, 42, которое выполняется электронным блоком управления (ЭБУ) 40 электрическим двигателем (далее именуемым ЭБУ электрического двигателя).
[0025] Хотя это и не показано на чертеже, ЭБУ 40 электрического двигателя представляет собой микропроцессор, который в основном включает в себя центральный процессор, и который дополнительно включает в себя ПЗУ, ОЗУ, входные/выходные порты, а также коммуникационный порт в дополнение к центральному процессору. В ПЗУ хранится программа обработки. В ОЗУ временно хранятся данные.
[0026] Сигналы различных датчиков, которые необходимы для выполнения управления движением с помощью электрических двигателей MG1, MG2, вводятся в ЭБУ 40 электрического двигателя через входной порт. Часть сигналов различных датчиков включает в себя сигналы углов θm1, θm2 поворота и сигналы фазовых токов. Сигнал угла θm1 поворота поступает от датчика 43 определения угла поворота, который определяет угол поворота ротора электрического двигателя MG1. Сигнал угла θm2 поворота поступает от датчика 44 определения угла поворота, который определяет угол поворота ротора электрического двигателя MG2. Сигналы фазовых токов поступают от датчиков тока, которые соответственно определяют токи, соответственно протекающие через фазы каждого электрического двигателя MG1, MG2.
[0027] Сигналы управления переключением и т.п. подаются из ЭБУ 40 электрического двигателя на переключающие элементы (не показаны) инверторов 41, 42.
[0028] ЭБУ 40 электрического двигателя соединен с ЭБУ 70 ГТС через коммуникационный порт. ЭБУ 40 электрического двигателя выполняет управление движением с помощью электрических двигателей MG1, MG2 в ответ на сигнал управления от ЭБУ 70 ГТС. ЭБУ 40 электрического двигателя там, где это необходимо, выдает данные относительно состояний движения электрических двигателей MG1, MG2 на ЭБУ 70 ГТС. ЭБУ 40 электрического двигателя вычисляет скорость Nm1 вращения электрического двигателя MG1 на основе сигнала угла θm1 поворота ротора электрического двигателя MG1 от датчика 43 определения угла поворота, и вычисляет скорость Nm2 вращения электрического двигателя MG2 на основе сигнала угла θm2 поворота ротора электрического двигателя MG2 от датчика 44 определения угла поворота.
[0029] Аккумулятор 50 представляет собой, например, литий-ионную аккумуляторную батарею или никель-металлгидридную аккумуляторную батарею. Как было описано выше, аккумулятор 50 подключен к линиям 54 электропитания вместе с инверторами 41, 42. Аккумулятор 50 управляется электронным блоком 52 управления аккумулятора (далее именуемым ЭБУ аккумулятора).
[0030] Хотя это и не показано на чертеже, ЭБУ 52 аккумулятора представляет собой микропроцессор, который в основном включает в себя центральный процессор и который дополнительно включает в себя ПЗУ, ОЗУ, входные/выходные порты, а также коммуникационный порт в дополнение к центральному процессору. В ПЗУ хранится программа обработки. В ОЗУ временно хранятся данные.
[0031] Сигналы различных датчиков, которые требуются для управления аккумулятором 50, поступают на ЭБУ 52 аккумулятора через входной порт. Часть сигналов различных датчиков включают в себя сигнал напряжения Vb аккумулятора, сигнал тока Ib аккумулятора (ток Ib аккумулятора имеет положительное значение, когда аккумулятор 50 разряжается), а также сигнал температуры Tb аккумулятора. Сигнал напряжения Vb аккумулятора выдается из датчика 51а напряжения, установленного между клеммами аккумулятора 50. Сигнал тока Ib аккумулятора выдается из датчика 51b тока, подключенного к выходному разъему аккумулятора 50. Сигнал температуры Tb аккумулятора выдается от датчика 51с температуры, подключенного к аккумулятору 50.
[0032] ЭБУ 52 аккумулятора соединен с ЭБУ 70 ГТС через коммуникационный порт. ЭБУ 52 аккумулятора при необходимости выводит данные, касающиеся состояния аккумулятора 50, на ЭБУ 70 ГТС. ЭБУ 52 аккумулятора вычисляет мощность Pb зарядки и разрядки как произведение напряжения Vb аккумулятора, получаемого от датчика 51а напряжения, и тока Ib аккумулятора, получаемого от датчика 51b тока. ЭБУ 52 аккумулятора вычисляет состояние заряда SOC на основе накопленного значения тока Ib аккумулятора, получаемого от датчика 51b тока. Состояние заряда SOC представляет собой процент полезной емкости электрической энергии аккумулятора 50 к общей емкости аккумулятора 50.
[0033] Хотя это и не показано на чертеже, ЭБУ 70 ГТС представляет собой микропроцессор, который в основном включает в себя центральный процессор, и который дополнительно включает в себя ПЗУ, ОЗУ, входные/выходные порты, а также коммуникационный порт в дополнение к центральному процессору. В ПЗУ хранится программа обработки. В ОЗУ временно хранятся данные.
[0034] Сигналы различных датчиков вводятся в ЭБУ 70 ГТС через входной порт. Часть сигналов различных датчиков включает в себя сигнал зажигания, сигнал положения SP рычага переключения передач, сигнал усилия Acc нажатия на педаль акселератора, сигнал положения BP педали тормоза и сигнал скорости V транспортного средства. Сигнал зажигания выдается из замка 80 зажигания. Сигнал положения SP рычага переключения передач выдается из датчика 82 положения рычага переключения передач, который определяет рабочее положение рычага 81 переключения передач. Сигнал усилия нажатия на педаль акселератора выдается из датчика 84 положения педали акселератора, который определяет усилие нажатия на педаль 83 акселератора. Сигнал положения BP педали тормоза выдается из датчика 86 положения педали тормоза, который определяет усилие нажатия на педаль 85 тормоза. Сигнал скорости V транспортного средства выдается из датчика 88 скорости транспортного средства.
[0035] Как описано выше, ЭБУ 70 ГТС соединен с ЭБУ 24 ДВС, ЭБУ 40 электрического двигателя и ЭБУ 52 аккумулятора через коммуникационный порт. ЭБУ 70 ГТС обменивается различными сигналами управления и данными с ЭБУ 24 ДВС, ЭБУ 40 электрического двигателя и ЭБУ 52 аккумулятора.
[0036] Сконфигурированное таким образом гибридное транспортное средство 20 в соответствии с первым примером осуществления движется в гибридном режиме движения (режим движения ГТС) или в электрическом режиме движения (режим движения электрического транспортного средства). Режим движения ГТС представляет собой режим движения, в котором гибридное транспортное средство 20 перемещается с помощью энергии ДВС 22, электрического двигателя MG1 и электрического двигателя MG2. Режим движения электрического транспортного средства представляет собой режим движения, в котором работа ДВС 22 остановлена, и гибридное транспортное средство 20 перемещается с использованием энергии, по меньшей мере, электрического двигателя MG1 и электрического двигателя MG2. Режим движения электрического транспортного средства включает в себя режим движения с одним электрическим двигателем и режим движения с двумя электрическими двигателями. В режиме движения с одним электрическим двигателем крутящий момент не выдается из электрического двигателя MG1, и гибридное транспортное средство 20 движется с использованием крутящего момента только электрического двигателя MG2. В режиме движения с двумя электрическими двигателями гибридное транспортное средство 20 движется с использованием крутящего момента электрического двигателя MG1 и крутящего момента электрического двигателя MG2.
[0037] Далее будет описано функционирование сконфигурированного таким образом гибридного транспортного средства 20 в соответствии с первым примером осуществления изобретения, в частности, действия по определению того, имеется ли неисправность в муфте CL1 одностороннего вращения, ведущих шестернях 33 или редукторе 35, когда гибридное транспортное средство 20 движется в режиме движения с двумя электрическими двигателями. На фиг. 2 представлена блок-схема, которая иллюстрирует пример процедуры обнаружения неисправности, которая выполняется ЭБУ 70 ГТС в соответствии с первым примером осуществления изобретения. Эта процедура выполняется, когда режим движения с двумя электрическими двигателями установлен в качестве режима движения и определена остановка работы ДВС 22.
[0038] По мере выполнения процедуры обнаружения неисправности ЭБУ 70 ГТС сначала получает сигналы скорости Nm1, Nm2 вращения электрических двигателей MG1, MG2 (этап S100). Значение, рассчитанное на основе сигнала угла θm1 поворота ротора электрического двигателя MG1 от датчика 43 определения угла поворота, подается от ЭБУ 40 электрического двигателя по линии коммуникации. Значение, рассчитанное на основе положения угла θm2 поворота ротора электрического двигателя MG2 от датчика 44 определения угла поворота, подается от ЭБУ 40 электрического двигателя по линии коммуникации.
[0039] В дальнейшем, исходя из предположения, что скорость Ne вращения ДВС 22 равна нулю, первую скорость Np1 вращения в качестве скорости вращения ведущего вала 36 рассчитывают, исходя из скорости Nm1 вращения электрического двигателя MG1, а вторую скорость Np2 вращения в качестве скорости вращения ведущего вала 36 рассчитывают, исходя из скорости Nm2 вращения электрического двигателя MG2 (этап S110). На фиг. 3 показан пример номограммы в то время, когда гибридное транспортное средство 20 движется в режиме движения с двумя электрическими двигателями. На графике левая ось S представляет скорость вращения солнечной шестерни 31 и скорость Nm1 вращения электрического двигателя MG1, ось С представляет собой скорость вращения водила 34 и скорость Ne вращения ДВС 22, ось R представляет собой скорость вращения кольцевой шестерни 32 и скорости вращения Np ведущего вала 36, а правая ось М представляет собой скорость вращения шестерни до уменьшения на редукторе 35 и скорость Nm2 вращения электрического двигателя MG2. Широкая стрелка на оси S обозначает крутящий момент, который выдается из электрического двигателя MG1, широкая стрелка на оси М обозначает крутящий момент, который выдается из электрического двигателя MG2, и две широких стрелки на оси R соответственно обозначают крутящий момент, который выдается из электрического двигателя MG1 на ведущий вал 36, и крутящий момент, который выдается из электрического двигателя MG2 на ведущий вал 36. ρ обозначает передаточное отношение (отношение числа зубьев солнечной шестерни 31 к числу зубьев кольцевой шестерни 32) планетарной передачи 30. Gr обозначает передаточное отношение редуктора 35. Как видно из номограммы, первую скорость Np1 вращения можно рассчитывать как произведение (Nm1×ρ) скорости Nm1 вращения электрического двигателя MG1 и передаточного отношения ρ, а вторую скорость Np2 вращения можно рассчитывать как произведение (Nm2/Gr) скорости Nm2 вращения электрического двигателя MG2 и обратной величины передаточного числа Gr. Вычисленная таким образом первая скорость Np1 вращения и вторая скорости Np2 вращения совпадают друг с другом в пределах допустимого диапазона ошибок датчика и т.п., когда нет неисправности в муфте CL1 одностороннего вращения, планетарной передаче 30 или редукторе 35.
[0040] В дальнейшем определяется, остановлена ли работа ДВС 22 (этап S120). Когда работа ДВС 22 не остановлена (ДВС 22 находится в рабочем состоянии), делается определение, что режим работы привода был изменен из режима движения с двумя электрическими двигателями на другой режим движения (например, режим движения ГТС), после чего процедура заканчивается. Определяют, что режим движения с двумя электрическими двигателями продолжается, когда работа ДВС 22 остановлена, а вычисленная первая скорость Np1 вращения и вторая скорость Np2 вращения сравниваются друг с другом (этап S130).
[0041] Когда первая скорость Np1 вращения выше или равна второй скорости Np2 вращения, делается определение, является ли значение (Np1-Np2), полученное путем вычитания второй скорости Np2 вращения из первой скорости Np1 вращения, большей величиной, чем пороговое значение Npref (этап S140). Пороговое значение Npref определяется заранее как верхнее предельное значение допустимого диапазона, в котором разность между первой скоростью Np1 вращения и второй скоростью Np2 вращения допускается из-за, например, ошибок датчика в обычное время, когда нет никаких неисправностей в муфте CL1 одностороннего вращения, планетарной передаче 30 или редукторе 35, или как значение, близкое к верхнему предельному значению, и может быть установлено, например, равным 400 оборотов в минуту, 500 оборотов в минуту, 600 оборотов в минуту и т.п. Таким образом, в обычное время, когда нет никаких неисправностей в муфте CL1 одностороннего вращения, планетарной передаче 30 или редукторе 35, значение (Np1-Np2), полученное путем вычитания второй скорости Np2 вращения из первой скорости Np1 вращения, меньше или равно порогового значения Npref. В этом случае счетчик CW неисправностей для муфты CL1 одностороннего вращения или ведущих шестерен 33 устанавливается равным нулю (этап S150), а затем процедура возвращается к этапу S100. С другой стороны, когда определено на этапе S130, что первая скорость Np1 вращения ниже второй скорости Np2 вращения, определяют, является ли значение (Np1-Np2), полученное путем вычитания второй скорости Np2 вращения из первой скорость Np1 вращения, величиной, которая меньше порогового значения Npref (этап S280). Пороговое значение -Npref получается путем умножения описанного выше порогового значения Npref на -1. В обычное время, когда нет неисправностей в муфте CL1 одностороннего вращения, планетарной передаче 30 или редукторе 35, значение (Np1-Np2), полученное путем вычитания второй скорости Np2 вращения из первой скорости Np1 вращения, больше или равно пороговому значению -Npref (абсолютное значение (Np1-Np2) меньше или равно Npref). В этом случае счетчик CR неисправностей для редуктора 35 устанавливается равным нулю (этап S290), и процесс возвращается к этапу S100. Таким образом, в обычное время, когда нет никаких неисправностей в муфте CL1 одностороннего вращения, планетарной передаче 30 или редукторе 35, периодически выполняются этапы S100-S150 и этапы S280 - этап S290, в то время как режим движения с двумя электрическими двигателями продолжается.
[0042] Когда определено на этапе S140, что значение (Np1-Np2), полученное путем вычитания второй скорости Np2 вращения из первой скорости Np1 вращения, больше, чем пороговое значение Npref, значение счетчика CW неисправностей для муфты CL1 одностороннего вращения или ведущих шестерней 33 увеличивается на 1 (этап S160). Затем определяется, больше ли значение счетчика CW неисправностей, чем пороговое значение CWref (этап S170). Когда значение счетчика CW неисправностей меньше или равно порогового значения CWref, процедура возвращается к этапу S100. Таким образом, когда продолжается состояние, в котором значение (Np1-Np2), полученное путем вычитания второй скорости Np2 вращения из первой скорости Np1 вращения, больше порогового значения Npref, этапы с S100 по S170 повторяются до тех пор, пока значение счетчика CW неисправностей не станет больше порогового значения CWref. Пороговое значение CWref изменяется в зависимости от частоты (интервала времени) повторения описанных выше этапов с S100 по S170, и значение счетчика, соответствующее двум секундам, трем секундам и т.п., используют в качестве истекшего времени. На фиг. 4 показан пример номограммы в то время, когда имеется неисправность (неисправность расцепления) в функции сцепления муфты CL1 одностороннего вращения. На диаграмме пунктирной линией показано состояние, в котором первая скорость Np1 вращения рассчитывается как скорость вращения ведущего вала 36 по скорости Nm1 вращения электрического двигателя MG1 при условии, что скорость Ne вращения ДВС 22 равна нулю. На фиг. 4 по причине наличия неисправности (неисправность расцепления) в функции сцепления муфты CL1 одностороннего вращения, скорость вращения ДВС 22 является отрицательной скоростью вращения; тем не менее, скорость вращения ведущего вала 36 рассчитывается на основе скорости Nm1 вращения электрического двигателя MG1 с тем условием, что скорость Ne вращения ДВС 22 равна нулю, таким образом, первая скорость Np1 вращения выше второй скорости Np2 вращения, рассчитанной по фактической скорости вращения ведущего вала 36 или скорости Nm2 вращения электрического двигателя MG2. В первом примере осуществления изобретения, когда определено, что значение (Np1-Np2), полученное путем вычитания второй скорости Np2 вращения из первой скорости Npl вращения, больше, чем пороговое значение Npref, коэффициент Km1 нагрузки электрического двигателя MG1 устанавливается таким образом, чтобы уменьшаться при уменьшении скорости вращения ДВС 22 (абсолютное значение скорости Ne вращения возрастает), чтобы предотвратить вращение ДВС 22 в обратном направлении на высокой скорости. На фиг. 5 показан пример коэффициента Km1 нагрузки электрического двигателя MG1 по отношению к скорости Ne вращения ДВС 22. Коэффициент Km1 нагрузки используется для умножения на команду Tm1* регулирования крутящего момента электрического двигателя MG1. В примере, показанном на фиг. 5, так как коэффициент Km1 нагрузки устанавливается таким образом, чтобы линейно изменяться от 1,0 до 0 в диапазоне от -500 оборотов в минуту до -1000 оборотов в минуту в обратном направлении вращения ДВС 22, ДВС 22 не вращается в обратном направлении вращения со скоростью вращения, более высокой, чем 1000 оборотов в минуту.
[0043] Когда определено, что значение счетчика CW неисправностей больше, чем пороговое значение CWref, определяется, что имеется неисправность в муфте CL1 одностороннего вращения или ведущих шестернях 33 планетарной передачи 30 (этап S180), и запрещается режим движения с двумя электрическими двигателями (этап S190). Как показано на фиг. 4, если гибридное транспортное средство 20 движется в режиме движения с двумя электрическими двигателями в то время, когда возникает неисправность в муфте CL1 одностороннего вращения, есть опасение, что ДВС 22 вращается в обратном направлении, и его компонент поломается из-за обратного вращения ДВС 22. По этим причинам, гибридному транспортному средству 20 запрещено двигаться в режиме движения с двумя электрическими двигателями. Когда пунктирная линия на фиг. 4 обозначает то состояние, в котором имеется неисправность в ведущих шестернях 33 (неисправность, состоящая в том, что ведущие шестерни 33 работают вхолостую), на фиг. 4 показан пример номограммы в то время, когда возникает неисправность в ведущих шестернях 33 (неисправность, состоящая в том, что ведущие шестерни 33 работают вхолостую). Когда ведущие шестерни 33 работают вхолостую, абсолютное значение скорости Nm1 вращения электрического двигателя MG1 увеличивается, поэтому первая скорость Np1 вращения становится выше второй скорости Np2 вращения. Таким образом, когда гибридное транспортное средство 20 движется в режиме движения с двумя электрическими двигателями в то время, когда возникает неисправность в ведущих шестернях 33, вращающий момент из электрического двигателя MG1 не может быть передан на ведущий вал 36 из-за холостого хода ведущих шестерен 33. По этой причине гибридному транспортному средству 20 запрещено двигаться в режиме движения с двумя электрическими двигателями.
[0044] Когда режим движения с двумя электрическими двигателями запрещен из-за неисправности в муфте CL1 одностороннего вращения или ведущих шестернях 33, ожидается запуск ДВС 22 (этап S200). Когда ДВС 22 запускается, выдаются сигналы скорости Nm1, Nm2 вращения электрических двигателей MG1, MG2 при запуске ДВС и сигнал скорости Ne вращения ДВС 22 (этап S210). Скорость Ne вращения ДВС 22 может быть вычислена на основе сигнала угла θcr поворота коленчатого вала датчика 23 положения коленчатого вала, и может поступать от ЭБУ 24 ДВС по линии коммуникации. Вычисляемая скорость Nec вращения в качестве скорости вращения ДВС 22 вычисляется на основе входных скоростей Nm1, Nm2 вращения электрических двигателей MG1, MG2 (этап S220). На фиг.6 показан пример номограммы в то время, когда ДВС 22 запускается. Вычисленную скорость Nec вращения можно получить получена путем расчета пропорции {(Np2+ρ×Nm1) / (1+ρ)}, используя скорость Nm1 вращения электрического двигателя MG1, вторую скорость Np2 вращения и передаточное отношение ρ планетарной передачи 30. Поскольку вторая скорость Np2 вращения является произведением (Nm2/Gr) скорости Nm2 вращения электрического двигателя MG2 и величины, обратной передаточному отношению Gr редуктора 35, вычисленная скорость Nec вращения составляет {(Nm2 /Gr+ρ×Nm1) / (1+ρ)}.
[0045] Определяют, является ли абсолютное значение разности между скоростью Ne вращения ДВС 22 и вычисленной скоростью Nec вращения величиной, которая меньше или равна пороговому значению Neref (этап S230). Пороговое значение Neref определяется заранее как верхнее предельное значение допустимого диапазона, определяемого ошибками датчиков или т.п., или как значение, близкое к этому верхнему предельному значению. Когда абсолютное значение разности между скоростью Ne вращения ДВС 22 и вычисленной скоростью Nec вращения меньше порогового значения Neref или равно ему, определяют, что скорость Ne вращения ДВС 22 закономерно увеличивается, и определяют, что имеется неисправность в муфте CL1 одностороннего вращения (этап S240). В случае неисправности в муфте CL1 одностороннего вращения (неисправности в функции сцепления), только ограничение обратного направления вращения ДВС 22 не может быть выполнено; тем не менее, нет никаких помех работе в прямом направлении вращения ДВС 22. Таким образом, гибридное транспортное средство может двигаться в режиме движения с одним электрическим двигателем или в режиме движения ГТС, допускается режим движения с одним электрическим двигателем и режим движения ГТС (этап S250), после чего процедура заканчивается.
[0046] С другой стороны, когда абсолютная величина разности между скоростью Ne вращения ДВС 22 и вычисленной скоростью Nec вращения больше порогового значения Neref, определяется, что скорость Ne вращения ДВС 22 не увеличивается закономерно, и определяется, что имеется неисправность в ведущих шестернях 33 (этап S260). В случае неисправности в ведущих шестернях 33 (неисправности холостого хода) скорость Ne вращения ДВС 22 не увеличивается, поскольку ведущие шестерни 33 работают вхолостую, в результате чего разность между скоростью Ne вращения и вычисленной скоростью Nec вращения увеличивается. В этом случае не возможна передача крутящего момента электрического двигателя MG1, таким образом, также невозможен запуск ДВС 22. Поэтому гибридное транспортное средство 20 имеет возможность двигаться только в режиме движения с одним электрическим двигателем, так что только допускается только режим движения с одним электрическим двигателем (этап S270), после чего процедура заканчивается.
[0047] Когда определено на этапе S280, что значение (Np1-Np2), полученное путем вычитания второй скорости Np2 вращения из первой скорости Np1 вращения, меньше, чем пороговое значение (-Npref) (абсолютное значение (Np1-Np2) больше Npref), к значению счетчика CR неисправностей редуктора 35 прибавляется 1 (этап S300). Определяется, больше ли значение счетчика CR неисправностей порогового значения CRref (этап S310). Когда значение счетчика CR неисправностей меньше или равно порогу CRref, процесс возвращается к этапу S100. Таким образом, когда продолжается состояние, в котором значение (Np1-Np2), полученное путем вычитания второй скорости Np2 вращения из первой скорости Np1 вращения, меньше порогового значения (-Npref) (больше по абсолютной величине), этапы S100 - этап S130, этап S280 и этап S300 повторяются, пока счетчик CR неисправностей не станет больше порогового значения CRref. Пороговое значение CRref изменяется в зависимости от частоты (временного интервала) повторения описанных выше этапов S100-S130, этапа S280 и этапа S300, а значение счетчика, соответствующее двум секундам, трем секундам и пр., используется в качестве истекшего времени. На фиг. 7 показан пример номограммы в то время, когда существует неисправность в редукторе 35. На диаграмме пунктирная линия показывает состояние, в котором вторая скорость Np2 вращения в качестве скорости вращения ведущего вала 36 рассчитывается исходя из скорости Nm2 вращения электрического двигателя MG2 с тем условием, что редуктор 35 работает исправно. На фиг. 7, так как имеется неисправность в редукторе 35, вторая скорость Np2 вращения выше, чем фактическая скорость вращения ведущего вала 36 или первая скорость Np1 вращения, рассчитываемая по скорости Nm1 вращения электрического двигателя MG1.
[0048] Когда определено, что значение счетчика CR неисправностей больше, чем пороговое значение Cref, определяется, что имеется неисправность в редукторе 35 (этап S320), при этом допускается только режим движения с ДВС и электрическим двигателем, в котором гибридное транспортное средство 20 перемещается с помощью энергии ДВС 22 и крутящего момента электрического двигателя MG1, и режим движения с одним электрическим двигателем MG1, в котором гибридное транспортное средство 20 перемещается с использованием только крутящего момента электрического двигателя MG1 (этап S330), после чего процедура заканчивается. При возникновении неисправности в редукторе 35 невозможно передавать крутящий момент электрического двигателя MG2 к ведущему валу 36, поэтому требуется запретить режим движения с двумя электрическими двигателями, режим движения ГТС и режим движения с одним электрическим двигателем с использованием электрического двигателя MG2. С другой стороны, можно выдавать крутящий момент из электрического двигателя MG1 на ведущий вал 36, при получении противодействующей силы с помощью муфты CL1 одностороннего вращения, и можно выдавать энергию ДВС 22 на ведущий вал 36 при получении противодействующей силы с использованием электрического двигателя MG1. По этой причине допускается только режим движения с ДВС и электрическим двигателем, в котором гибридное транспортное средство 20 перемещается с помощью энергии ДВС 22 и крутящего момента электрического двигателя MG1.
[0049] В описанном выше гибридном транспортном средстве 20 в соответствии с первым примером осуществления изобретения в режиме движения с двумя электрическими двигателями при условии, что скорость Ne вращения ДВС 22 равна нулю, первую скорость Np1 вращения как скорость вращения ведущего вала 36 рассчитывают по скорости Nm1 вращения электрического двигателя MG1, а вторую скорость Np2 вращения как скорость вращения ведущего вала 36 рассчитывают по скорости Nm2 вращения электрического двигателя MG2. Продолжается состояние, в котором значение (Np1-Np2), полученное путем вычитания второй скорости Np2 вращения из первой скорости Np1 вращения, больше, чем пороговое значение Npref, и, если значение счетчика CW неисправностей становится больше порогового значения CWref, определяется, что имеется неисправность в муфте CL1 одностороннего вращения или ведущих шестернях 33 планетарной передачи 30. Когда делается такое определение, в момент следующего запуска ДВС 22 определяется, что имеется неисправность в муфте CL1 одностороннего вращения, когда скорость Ne вращения ДВС 22 закономерно увеличивается, и определяется, что имеется неисправность в ведущих шестернях 33, когда скорость Ne вращения ДВС 22 закономерно не увеличивается. Продолжается состояние, в котором значение (Np1-Np2), полученное путем вычитания второй скорости Np2 вращения из первой скорости Np1 вращения, меньше, чем пороговое значение (-Npref) (больше по абсолютной величине), и если значение счетчика CR неисправностей становится больше порогового значения CRref, определяется, что имеется неисправность в редукторе 35. Таким образом, можно правильно обнаружить неисправность в муфте CL1 одностороннего вращения, неисправность в ведущих шестернях 33 или неисправность в редукторе 35.
[0050] В гибридном транспортном средстве 20 в соответствии с первым примером осуществления изобретения, когда определено, что имеется неисправность в муфте CL1 одностороннего вращения или ведущих шестернях 33, запрещается режим движения с двумя электрическими двигателями. Когда определено, что имеется неисправность в муфте CL1 одностороннего вращения, допускается режим движения с одним электрическим двигателем и режим движения ГТС. Когда определено, что имеется неисправность в ведущих шестернях 33, допускается только режим движения с одним электрическим двигателем. Когда определено, что имеется неисправность в редукторе 35, допускается только режим движения с ДВС и электрическим двигателем, в котором гибридное транспортное средство 20 передвигается с использованием энергии ДВС 22 и крутящего момента электрического двигателя MG1. Таким образом, путем запрета или разрешения режимов движения можно обеспечить движение даже при наличии неисправности в муфте CL1 одностороннего вращения, ведущих шестернях 33 или редукторе 35.
[0051] В гибридном транспортном средстве 20 в соответствии с первым примером осуществления изобретения предусмотрен редуктор 35. Вместо этого электрический двигатель MG2 может быть напрямую соединен с ведущим валом 36 без наличия редуктора 35. В этом случае этапы S280-S330 процедуры обнаружения неисправности, показанной на фиг. 2, не являются необходимыми.
[0052] В гибридном транспортном средстве 20 согласно первому примеру осуществления изобретения муфта CL1 одностороннего вращения подсоединена к водилу 34. Вместо этого, как показано в гибридном транспортном средстве 220 в соответствии со вторым примером осуществления изобретения, проиллюстрированным на фиг. 8, фиксатор BR1 может быть соединен с водилом 34. Фиксатор BR1 фиксирует (соединяет) водило 34 с кожухом 21 таким образом, что водило 34 не является вращаемым, или разъединяет водило 34 с кожухом 21 таким образом, что водило 34 становится вращаемым. В этом случае в режиме движения с двумя электрическими двигателями, в основном, гибридное транспортное средство 220 перемещается, в то время как водило 34 зафиксировано посредством сцепления фиксатора BR1. По этой причине в процедуре обнаружения неисправности, показанной на фиг. 2, неисправность в муфте CL1 одностороннего вращения может рассматриваться как неисправность в фиксаторе BR1.
[0053] В гибридном транспортном средстве 20 в соответствии с первым примером осуществления изобретения единая планетарная передача 30 и редуктор 35 предусмотрены в качестве планетарной зубчатой передачи. Вместо того, две или более планетарных передачи могут использоваться в качестве планетарной зубчатой передачи. В этом случае может быть использовано гибридное транспортное средство 320 в соответствии с третьим примером осуществления изобретения, показанным на фиг. 9.
[0054] Гибридное транспортное средство 320 в соответствии с третьим примером осуществления изобретения, показанным на фиг. 9, включает в себя планетарные передачи 330, 340 вместо планетарной передачи 30 гибридного транспортного средства 20, в качестве планетарной зубчатой передачи, а также включает в себя муфту CL2 и фиксатор BR2.
[0055] Планетарная передача 330 является единой шестеренчатой планетарной передачей. Планетарная передача 330 включает в себя солнечную шестерню 331, кольцевую шестерню 332, множество ведущих шестерен 333 и водило 334. Солнечная шестерня 331 представляет собой внешнюю шестерню. Кольцевая шестерня 332 является внутренней шестерней. Множество ведущих шестерен 333 находятся в зацеплении с солнечной шестерней 331 и кольцевой шестерней 332. Водило 334 поддерживает множество ведущих шестерен 333 таким образом, что каждая шестерня 333 имеет возможность поворота и вращения. Ротор электрического двигателя MG2 соединен с солнечной шестерней 331. Коленчатый вал 26 ДВС 22 соединен с кольцевой шестерней 332. Ведущий вал 336, соединенный с ведущими колесами 39а, 39b через дифференциал 38 и зубчатый механизм 37, соединен с водилом 334.
[0056] Планетарная передача 340 является единой шестеренчатой планетарной передачей. Планетарная передача 340 включает в себя солнечную шестерню 341, кольцевую шестерню 342, множество шестерен 343 и водило 344. Солнечная шестерня 341 является внешней шестерней. Кольцевая шестерня 342 является внутренней шестерней. Множество шестерен 343 находятся в зацеплении с солнечной шестерней 341 и кольцевой шестерней 342. Водило 344 поддерживает множество ведущих шестерен 343 таким образом, что каждая шестерня 343 имеет возможность поворота и вращения. Ротор электрического двигателя MG1 соединен с солнечной шестерней 341. Ведущий вал 336 соединен с водилом 344.
[0057] Муфта CL2 соединяет солнечную шестерню 331 планетарной передачи 330 и ротор электрического двигателя MG2 с кольцевой шестерней 342 планетарной шестерни 340 или расцепляет соединение между ними. Фиксатор BR2 фиксирует (соединяет) кольцевую шестерню 342 планетарной шестерни 340 с кожухом 21 таким образом, что кольцевая шестерня 342 становится вращаемой, либо расцепляет кольцевую шестерню 342 с кожухом 21 таким образом, что кольцевая шестерня 342 становится вращаемой.
[0058] Фиг. 10 представляет собой пример номограммы планетарных передач 330, 340 в то время, когда гибридное транспортное средство 320 движется в режиме движения с двумя электрическими двигателями в состоянии, в котором муфта CL2 установлена в сцепленное состояние, а фиксатор BR2 установлен в расцепленное состояние. Фиг. 11 представляет собой вид, иллюстрирующий пример номограммы планетарных передач 330, 340 в то время, когда гибридное транспортное средство 320 движется в режиме движения с двумя электрическими двигателями в состоянии, в котором муфта CL2 установлена в расцепленное состояние, а фиксатор BR2 установлен в сцепленное состояние. На фиг. 10 и фиг. 11 ось S1 и ось R2 представляют скорость вращения солнечной шестерни 331 планетарной передачи 330, скорость вращения кольцевой шестерни 342 планетарной шестерни 340, и скорость Nm2 вращения электрического двигателя MG2. Ось С1 и ось С2 представляют скорости вращения водил 334, 344 планетарных передач 330, 340 и скорость вращения ведущего вала 336. Ось R1 представляет скорость вращения кольцевой шестерни 332 планетарной передачи 330 и скорость Ne вращения ДВС 22. Ось S2 представляет скорость вращения солнечной шестерни 341 планетарной шестерни 340 и скорость Nm1 вращения электрического двигателя MG1. На фиг. 10 и фиг. 11 две широких стрелки на осях C1 и С2 соответственно обозначают крутящий момент (Tm1×k1), который выдается на ведущий вал 336 в то время, когда крутящий момент Tm1 выдается из электрического двигателя MG1, и крутящий момент (Tm2×k2), который выдается на ведущий вал 336 в то время, когда крутящий момент Tm2 выдается из электрического двигателя MG2. Коэффициент k1 преобразования является коэффициентом для преобразования крутящего момента Tm1 электрического двигателя MG1 в крутящий момент ведущего вала 336. Коэффициент k2 преобразования является коэффициентом для преобразования крутящего момента Tm2 электрического двигателя MG2 в крутящий момент ведущего вала 336.
[0059] В случае, изображенном на фиг. 10, муфта CL2 установлена в сцепленное состояние, при этом скорость вращения солнечной шестерни 331 планетарной передачи 330, которая является скоростью Nm2 вращения электрического двигателя MG2, такая же, что и скорость вращения кольцевой шестерни 342 планетарной шестерни 340. Таким образом, планетарные передачи 330, 340 функционируют в качестве так называемой четырехэлементной планетарной зубчатой передачи. В этом случае в режиме движения с двумя электрическими двигателями крутящий момент Tm1 в направлении, в котором скорость Nm1 вращения электрического двигателя MG1 увеличивается в отрицательном направлении (в направлении вниз на диаграмме), выдается из электрического двигателя MG1 на солнечную шестерню 341 планетарной передачи 340, и крутящий момент Tm2 в том направлении, в котором скорость Nm2 вращения электрического двигателя MG2 увеличивается в положительном направлении (в направлении вверх на диаграмме) выдается из электрического двигателя MG2 на солнечную шестерню 331 планетарной передачи 330 и кольцевую шестерню 342 планетарной шестерни 340. Таким образом, гибридное транспортное средство 320 имеет возможность двигаться с помощью крутящего момента электрического двигателя MG1 и электрического двигателя MG2, в то время как кольцевая шестерня 332 (ДВС 22) планетарной передачи 330 находится в состоянии остановленного вращения.
[0060] В случае, изображенном на фиг. 11, в режиме движения с двумя электрическими двигателями крутящий момент Tm1 в направлении, в котором скорость Nm1 вращения электрического двигателя MG1 увеличивается в положительном направлении (в направлении вверх на диаграмме) выдается из электрического двигателя MG1 на солнечную шестерню 341 планетарной передачи 340, и крутящий момент Tm2 в том направлении, в котором скорость Nm2 вращения электрического двигателя MG2 увеличивается в положительном направлении (в направлении вверх на диаграмме) выдается из электрического двигателя MG2 на солнечную шестерню 331 планетарной передачи 330 и кольцевую шестерню 342 планетарной передачи 340. Таким образом, гибридное транспортное средство 320 имеет возможность двигаться с помощью крутящего момента электрического двигателя MG1 и электрического двигателя MG2, в то время как кольцевая шестерня 332 (ДВС 22) планетарной передачи 330 находится в состоянии остановленного вращения.
[0061] Фиг. 12 представляет собой пример номограммы в то время, когда возникла неисправность в муфте CL1 одностороннего вращения в состоянии (состоянии, показанном на фиг. 10), когда гибридное транспортное средство 320 движется в режиме движения с двумя электрическими двигателями, в то время как муфта CL2 установлена в сцепленное состояние, а фиксатор BR2 установлен в расцепленное состояние. На диаграмме сплошной линией показано состояние, в котором возникла неисправность в муфте CL1 одностороннего вращения. Пунктирной линией показано состояние, в котором первая скорость Np1 вращения как скорость вращения ведущего вала 336 рассчитывается по скорости Nm1 вращения электрического двигателя MG1 при условии, что скорость Ne вращения ДВС 22 равна нулю. Штрих-пунктирной линией показано состояние, в котором вторая скорость Np2 вращения как скорость вращения ведущего вала 336 рассчитывается по скорости Nm2 вращения электрического двигателя MG2 при условии, что скорость Ne вращения ДВС 22 равна нулю. Как показано на диаграмме, когда возникает неисправность в муфте CL1 одностороннего вращения, первая скорость Np1 вращения выше второй скорости Np2 вращения. По этой причине в режиме движения с двумя электрическими двигателями в состоянии, показанном на фиг. 10, в гибридном транспортном средстве 320 в соответствии с третьим примером осуществления изобретения также можно определить, имеется ли неисправность в муфте CL1 одностороннего вращения, используя этапы S100 S190 процедуры обнаружения неисправности, показанной на фиг.2.
[0062] На фиг. 13 представлен пример номограммы в то время, когда возникает неисправность в муфте CL1 одностороннего вращения в состоянии (состоянии, показанном на фиг. 11), когда гибридное транспортное средство 320 движется в режиме движения с двумя электрическими двигателями, в то время как муфта CL2 установлена в расцепленное состояние, а фиксатор BR2 установлен в сцепленное состояние. На диаграмме сплошной линией показано состояние, в котором возникает неисправность в муфте CL1 одностороннего вращения. Пунктирной линией показано состояние, в котором вторая скорость Np2 вращения как скорость вращения ведущего вала 336 рассчитывается по скорости Nm2 вращения электрического двигателя MG2 при условии, что скорость Ne вращения ДВС 22 равна нулю. Как показано на диаграмме, при возникновении неисправности в муфте CL1 одностороннего вращения первая скорость Np1 вращения ниже второй скорости Np2 вращения. По этой причине в режиме движения с двумя электрическими двигателями в состоянии, показанном на фиг. 11, в гибридном транспортном средстве 320 в соответствии с третьим примером осуществления изобретения можно определить наличие неисправности в муфте CL1 одностороннего вращения путем взаимной перестановки первой скорости Np1 вращения и второй скорости Np2 вращения в процессах этапов S100-S190 в процедуре обнаружения неисправности, показанной на фиг. 2.
[0063] Ниже будет описана соответствующая взаимосвязь между основными элементами примеров осуществления изобретения и основными элементами, описанными в сущности изобретения. В примерах осуществления изобретения ДВС 22 соответствует двигателю внутреннего сгорания (ДВС), электрический двигатель MG1 соответствует первому электрическому двигателю, электрический двигатель MG2 соответствует второму электрическому двигателю, планетарная передача 30 и редуктор 35 соответствуют планетарной зубчатой передаче, муфта CL1 одностороннего вращения соответствует механизму ограничения вращения, аккумулятор 50 соответствует аккумулятору, комбинация ЭБУ 24 ДВС, ЭБУ 40 электрического двигателя и ЭБУ 70 ГТС соответствует электронному блоку управления, и ЭБУ 70 ГТС, который выполняет процедуру обнаружения неисправности, показанную на фиг. 2, соответствует электронному блоку управления.
[0064] Что касается соответствующей взаимосвязи между основными элементами примеров осуществления изобретения и основными элементами, описанными в сущности изобретения, каждая пример осуществления изобретения представляет собой пример, особо иллюстрирующий режим осуществления изобретения, описанный в сущности изобретения. Каждый пример осуществления изобретения не предназначен для ограничения элементов изобретения, описанных в сущности изобретения. То есть, изобретение, описанное в сущности изобретения, следует толковать на основе описания в целом, и каждый пример осуществления изобретения является лишь конкретным примером изобретения, описанного в сущности изобретения.
[0065] Примеры осуществления настоящего изобретения описаны выше; однако настоящее изобретение не ограничивается этими примерами осуществления. Конечно, изобретение может быть реализовано в различных формах в пределах объема настоящего изобретения.
[0066] Изобретение применимо в производстве гибридных транспортных средств и т.п.








Изобретение относится к гибридным транспортным средствам. Гибридное транспортное средство содержит двигатель внутреннего сгорания; первый и второй электродвигатели и планетарную зубчатую передачу. Также имеется механизм ограничения вращения двигателя, аккумулятор и электронный блок управления. Блок управления управляет электродвигателями в режиме движения с двумя электродвигателями, при этом вращение двигателя ограничено так, что требуемый крутящий момент подается на ведущий вал от первого и второго электродвигателей. Также блок определяет в указанном режиме движения наличие неисправности в планетарной передаче или в механизме ограничения вращения, если расхождение между первой и второй скоростью вращения ведущего вала больше порогового значения. Первую скорость вращения вычисляют по скорости вращения первого электродвигателя, когда вращение двигателя ограничено. Вторую скорость вращения вычисляют по скорости вращения второго электродвигателя. Повышается точность определения неисправности. 5 з.п. ф-лы, 13 ил.
1. Гибридное транспортное средство, содержащее:
двигатель внутреннего сгорания (ДВС);
первый электрический двигатель;
второй электрический двигатель;
планетарную зубчатую передачу, включающую в себя по меньшей мере одну планетарную передачу, при этом вращающиеся элементы планетарной зубчатой передачи соединены с ДВС, первым электрическим двигателем, вторым электрическим двигателем и ведущим валом, соединенные с мостом транспортного средства;
механизм ограничения вращения, сконфигурированный для ограничения вращения ДВС;
аккумулятор, сконфигурированный для обмена электрической энергией с первым электрическим двигателем и вторым электрическим двигателем; и
электронный блок управления, сконфигурированный, чтобы
i) управлять первым электрическим двигателем и вторым электрическим двигателем в режиме движения с двумя электрическими двигателями, в котором гибридное транспортное средство движется с использованием крутящего момента первого электрического двигателя и крутящего момента второго электрического двигателя в состоянии, в котором вращение ДВС ограничено, таким образом, что требуемый крутящий момент, который необходим для ведущего вала, подается на ведущий вал от первого электрического двигателя и второго электрического двигателя, и
ii) определять в режиме движения с двумя электрическими двигателями наличие неисправности либо в планетарной зубчатой передаче, либо в механизме ограничения вращения, если расхождение между первой скоростью вращения ведущего вала и второй скоростью вращения ведущего вала больше порогового значения, причем первую скорость вращения вычисляют по скорости вращения первого электрического двигателя в то время, когда вращение ДВС ограничено, а вторую скорость вращения вычисляют по скорости вращения второго электрического двигателя.
2. Гибридное транспортное средство по п. 1, в котором
планетарная зубчатая передача включает в себя единую шестеренчатую планетарную передачу,
единая шестеренчатая планетарная передача включает в себя солнечную шестерню, соединенную с первым электрическим двигателем, кольцевую шестерню, соединенную с ведущим валом, и водило, соединенное с множеством ведущих шестерен и соединенное с ДВС, и
электронный блок управления сконфигурирован, чтобы определять наличие неисправности в механизме ограничения вращения или ведущих шестернях, если первая скорость вращения выше, чем вторая скорость вращения, на величину, равную пороговому значению или большую.
3. Гибридное транспортное средство по п. 2, в котором
механизм ограничения вращения представляет собой муфту одностороннего вращения, которая разрешает прямое вращение ДВС и не допускает обратного вращения ДВС, и
электронный блок управления сконфигурирован, чтобы при запуске ДВС электронным блоком управления после определения наличия неисправности либо в механизме ограничения вращения, либо в шестернях i) определять наличие неисправности в муфте одностороннего вращения, если разность между скоростью вращения, вычисленной по скорости вращения первого электрического двигателя и скорости вращения второго электрического двигателя, и скоростью вращения ДВС меньше или равна заранее заданной разности, и ii) определять наличие неисправности в ведущих шестернях, если упомянутая разность больше заранее заданной разности.
4. Гибридное транспортное средство по п. 3, в котором электронный блок управления сконфигурирован, чтобы
i) при определении электронным блоком управления наличия неисправности в муфте одностороннего вращения разрешать гибридный режим и режим движения с одним электрическим двигателем, причем гибридный режим представляет собой режим, в котором гибридное транспортное средство движется, используя энергию ДВС, крутящий момент первого электрического двигателя и крутящий момент второго электрического двигателя, в то время как режим движения с двумя электрическими двигателями запрещен, кроме того, режим движения с одним электрическим двигателем представляет собой режим, в котором гибридное транспортное средство движется, используя только крутящий момент второго электрического двигателя, пока ДВС находится в состоянии остановленного вращения, и
ii) при определении электронным блоком управления наличия неисправности в ведущих шестернях разрешать режим движения с одним электрическим двигателем, в то время как режим с двумя электрическими двигателями и гибридный режим запрещены.
5. Гибридное транспортное средство по любому из пп. 2-4, в котором
планетарная зубчатая передача включает в себя редуктор, соединенный со вторым электрическим двигателем, и кольцевую шестерню, и
электронный блок управления сконфигурирован, чтобы определить наличие неисправности в редукторе, если первая скорость вращения ниже второй скорости вращения на величину, равную пороговому значению или большую.
6. Гибридное транспортное средство по п. 5, в котором электронный блок управления сконфигурирован, чтобы при определении электронным блоком управления наличия неисправности в редукторе запрещать режим движения, за исключением режима движения с ДВС и электрическим двигателем и режима движения с одним первым электрическим двигателем, при этом режим движения с ДВС и электрическим двигателем представляет собой режим, в котором гибридное транспортное средство движется, используя энергию ДВС и крутящий момент первого электрического двигателя, а режим движения с одним первым электрическим двигателем представляет собой режим, в котором гибридное транспортное средство движется, используя только крутящий момент первого электрического двигателя.
| JP 2002012046 A, 15.01.2002 | |||
| US 2011220428 A1, 15.09.2011 | |||
| WO 2007138401 A2, 06.12.2007 | |||
| US 5433282 A, 18.07.1995. |

