ОБЛАСТЬ ТЕХНИКИ
[0001] Изобретение относится в целом к системам управления технологическими процессами, конкретнее к способам и устройству для калибровки устройства для обработки.
УРОВЕНЬ ТЕХНИКИ
[0002] Процессами, такими как, например, промышленными процессами, как правило, управляют с помощью разнообразных устройств управления процессом, таких как приводные механизмы и пневматические клапаны. Во время эксплуатации приборы, подключенные к данным устройствам управления процессом, могут потребовать калибровки и/или повторной калибровки. Например, когда устанавливается новый механизм позиционирования клапана, он может быть откалиброван для использования с клапаном для обеспечения точного действия клапана. В некоторых случаях калибровка механизма позиционирования клапана требует осуществления хода клапана, с которым функционально связан механизм позиционирования, от одного конечного положения (например, полностью закрытого положения) до другого конечного положения (например, полностью открытого положения). Для правильной калибровки механизма позиционирования клапан, возможно, понадобится перевести в автономный режим. Однако это не всегда возможно, поскольку некоторые технологические установки работают в непрерывном режиме и/или клапан не содержит обводной линии. В некоторых известных системах калибровка механизма позиционирования может дополнительно или альтернативно потребовать участия лица или пользователя для ввода информации. Однако такой ввод данных пользователем в механизм позиционирования вводит возможность ошибки в процессе калибровки.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0003] Вариант осуществления способа включает в себя определение того, является ли первое положение устройства управления процессом первым конечным положением и, в ответ на первое положение, являющееся первым конечным положением, расчет второго конечного положения устройства управления процессом на основании первого конечного положения и данных конфигурации. Вариант осуществления способа дополнительно включает в себя расчет зоны неполного хода устройства управления процессом на основании первого конечного положения и второго конечного положения, и определение того, когда текущее положение устройства управления процессом находится в пределах зоны неполного хода. Вариант осуществления способа также включает в себя расчет смещения выхода на основании управляющего сигнала и суммарного значения, когда текущее положение находится в пределах зоны неполного хода.
[0004] Вариант осуществления устройства содержит запоминающее устройство и обрабатывающее устройство, соединенное с запоминающим устройством, содержащим команды. Вариант осуществления устройства также включает в себя команды в запоминающем устройстве, вынуждающие обрабатывающее устройство определять, является ли первое положение устройства управления процессом положением неполного хода устройства управления процессом и в ответ на то, что первое положение является положением неполного хода, рассчитывать целевое выходное давление на основании данных конфигурации. Вариант осуществления устройства также включает в себя команды в запоминающем устройстве, вынуждающие обрабатывающее устройство определять, является ли давление обратной связи равным целевому давлению, когда давление обратной связи соответствует выходному сигналу выходного давления от устройства управления процессом. Вариант осуществления устройства также включает в себя команды в запоминающем устройстве, вынуждающие обрабатывающее устройство рассчитывать разность между целевым выходным давлением и давлением обратной связи и изменять выходное давление по этой разности.
[0005] Вариант осуществления материального машиночитаемого носителя для хранения данных включает в себя команды, вынуждающие компьютер определять, является ли первое положение устройства управления процессом первым конечным положением и в ответ на первое положение, являющееся первым конечным положением, вынуждающие компьютер рассчитывать второе конечное положение устройства управления процессом на основании первого конечного положения и данных конфигурации. Вариант осуществления материального машиночитаемого носителя для хранения данных также включает в себя команды, вынуждающие компьютер рассчитывать зону неполного хода устройства управления процессом на основании первого конечного положения и второго конечного положения. Вариант осуществления материального машиночитаемого носителя для хранения данных также включает в себя команды, вынуждающие компьютер рассчитывать, когда текущее положение устройства управления процессом находится в пределах зоны неполного хода и, если текущее положение находится в пределах зоны неполного хода, вынуждающие компьютер рассчитывать смещение выхода на основании управляющего сигнала и суммарного значения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0006] Фиг. 1 иллюстрирует вариант осуществления системы управления процессом, в которой могут быть реализованы принципы настоящего изобретения.
[0007] Фиг. 2 - блок-схема варианта осуществления прибора по фиг. 1.
[0008] Фиг. 3 - блок-схема варианта осуществления устройства для калибровки по неполному ходу по фиг. 2.
[0009] Фиг. 4 - блок-схема, представляющая вариант осуществления способа, раскрытого в настоящем документе.
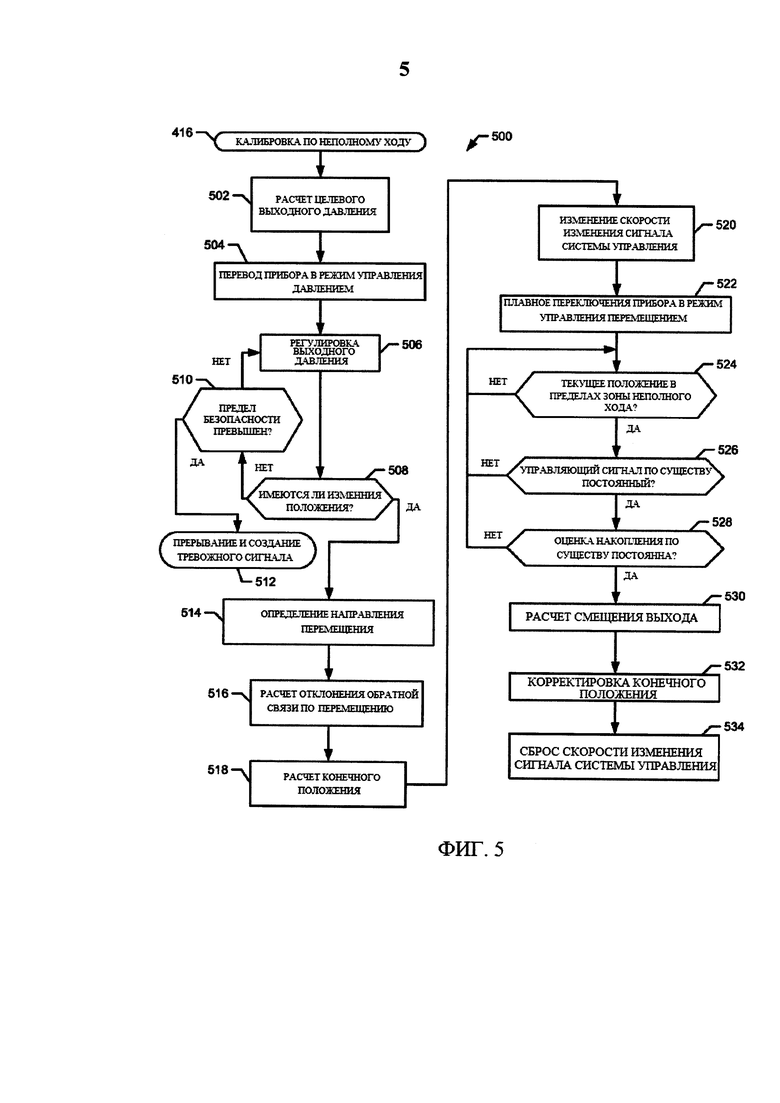
[0010] Фиг. 5 - блок-схема, представляющая другой вариант осуществления способа, раскрытого в настоящем документе.
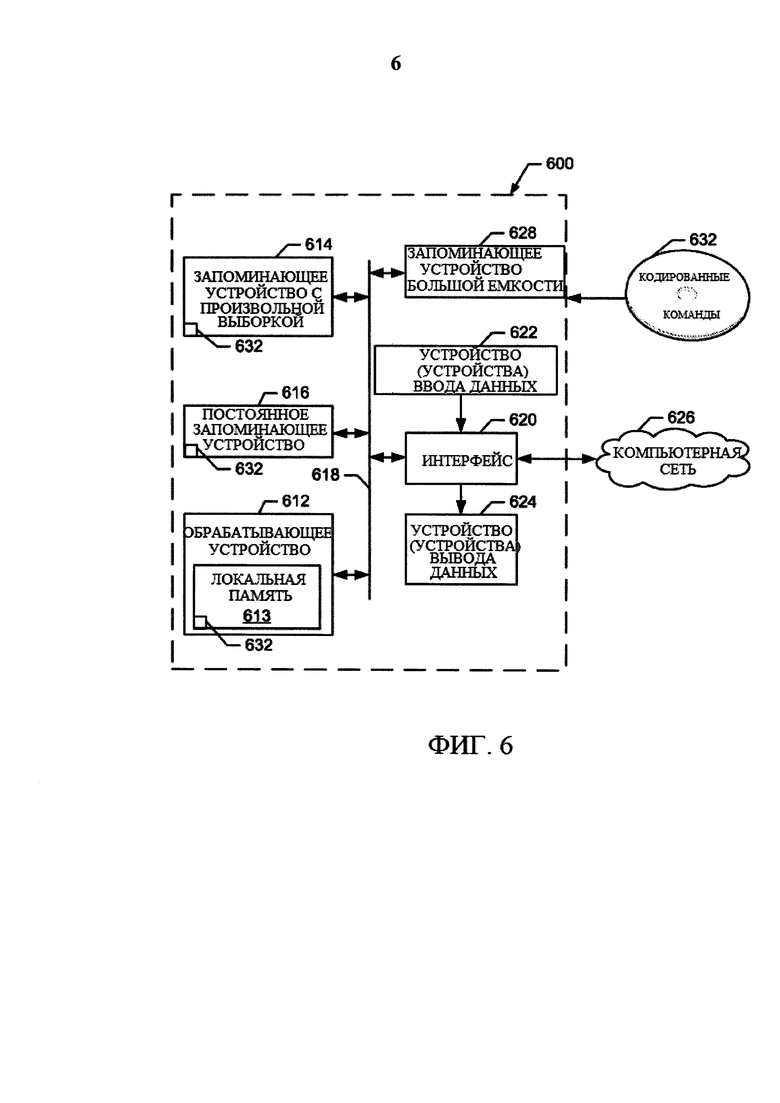
[0011] Фиг. 6 - блок-схема варианта осуществления обрабатывающей платформы, выполненной с возможностью выполнять примеры способов по фиг. 4 и 5 для реализации варианта осуществления прибора по фиг. 1 и 2.
ПОДРОБНОЕ ОПИСАНИЕ
[0012] На вышеупомянутых чертежах показаны и ниже подробно описаны конкретные варианты осуществления. В описываемых здесь вариантах осуществления для идентификации одинаковых или подобных элементов использованы аналогичные или идентичные ссылочные номера. Для ясности и/или краткости чертежи не обязательно выполнены в масштабе, и конкретные признаки и конкретные виды чертежей могут быть показаны увеличенными в масштабе или схематичными. Кроме того, в настоящем описании раскрыты некоторые варианты осуществления. Какие-либо признаки из какого-либо варианта осуществления могут быть включены, заменены или объединены иным способом с другими признаками из других вариантов.
[0013] Описанные в настоящем документе варианты осуществления связаны с калибровкой прибора, такого как устройство позиционирования или механизм позиционирования устройства управления процессом, такого как клапанный узел, без потребности в переводе в автономный режим, или воздействия иным способом на систему управления процессом, в рамках которой работает прибор, и без потребности ввода данных пользователем (например, автоматически). В частности, раскрытые здесь варианты осуществления могут быть использованы для автоматической калибровки прибора, такого как механизм позиционирования для клапанного узла (например, пневматического клапана и пневматического привода) с помощью сбора информации о клапанном узле. Например, прибор (например, механизм позиционирования), соединенный с узлом привода, может автоматически собирать информацию о типе привода, с которым он соединен, диапазоне давления, необходимом для управления приводом, проценте перемещения или градусе поворота, или о том, соответствует ли входной сигнал низкого уровня тока или напряжения закрытому положению или открытому положению и др. Данная информация дает прибору возможность правильно регулировать или калибровать выходной сигнал от прибора к клапанному узлу для гарантии, что сигнал системы управления от устройства управления соответствует сигналу обратной связи, полученному от датчика положения клапанного узла. Процесс калибровки также может инициировать пользователь. Кроме того, благодаря возможности прибора автоматически собирать вышеупомянутую информацию без необходимости ввода данных пользователем, уменьшается возможность ошибки за счет ввода данных пользователем во время калибровки.
[0014] В некоторых вариантах осуществления, когда прибор установлен и соединен с устройствами управления процессом, такими как клапанный узел, прибор функционально помещается между клапанным узлом и устройством управления (например, системой управления, такой как распределенная система управления (DCS)). В частности, прибор получает управляющий сигнал от устройства управления и выводит соответствующее давление для управления или контроля клапанного узла. Во время работы прибор собирает информацию от клапанного узла (например, тип привода, диапазон давления, диапазон датчика перемещения, длина хода клапана и др.), используя проводную или беспроводную связь (например, с помощью устройства радиочастотной идентификации (RFID) (например, управляющего кода)). Данная информация затем может быть сохранена в запоминающем устройстве (например, энергонезависимой памяти) и использована в расчетах для выполнения калибровки, таких как расчет ожидаемых значений (например, ожидаемого положения клапана) и/или для расчета корректировок на основании сравнений с ожидаемыми значениями.
[0015] В некоторых вариантах осуществления прибор может быть установлен и соединен с устройствами управления процессом, таким как клапанный узел, когда клапан находится на одном конце перемещения (например, полностью открытом или полностью закрытом положении). В некоторых подобных случаях прибор может автоматически выполнять калибровку в режиме управления перемещением, в котором для управления клапаном используется сигнал обратной связи, представляющий положение клапана. В других вариантах осуществления, в которых клапан не находится в конце перемещения, когда прибор установлен, он может автоматически выполнять калибровку в режиме управления давлением, в котором для управления положением клапана прибор используется сигнал обратной связи, представляющий давление привода.
[0016] Для вариантов осуществления, в которых прибор находится в режиме управления перемещением, прибор рассчитывает другое конечное положение (например, другое полностью открытое положение или полностью закрытое положение), используя информацию о длине хода, полученную от клапанного узла, детали механизма обратной связи по перемещению, а также рассчитывает положение неполного хода и/или зону неполного хода (т.е., диапазон положений неполного хода). В процессе работы, когда положение клапана находится в зоне неполного хода, сигнал системы управления и оценка накопления интегрирующего устройства прибора остаются по существу постоянными, прибор подстраивает смещение выхода за счет оценки накопления интегрирующего устройства прибора, а затем сбрасывает оценку накопления интегрирующего устройства прибора на ноль. Оценка накопления интегрирующего устройства прибора представляет собой величину, рассчитанную интегрирующим устройством в приборе, которая показывает корректировки интегрирующего устройства, выполненные, чтобы привести положение клапана в соответствие с сигналом системы управления. Прибор также сохраняет новое смещение выхода в запоминающем устройстве, чтобы завершить калибровку, без необходимости в выполнении какого-либо процесса, управляемого по меньшей мере частично клапанным узлом в автономном режиме, или влияния на процесс иным образом.
[0017] В других вариантах осуществления, когда клапан не находится в конце перемещения при установке, прибор выполняет ряд операций, чтобы согласовать сигнал обратной связи по давлению с рассчитанным целевым выходным сигналом давления в режиме управления процессом. В процессе текущего контроля сигнала обратной связи по давлению прибор увеличивает и уменьшает выходное давление, пока не будет обнаружено направление перемещения. На основании информации о текущем перемещении клапана, диапазоне перемещения и обратной связи по перемещению регулирующего клапана прибор рассчитывает концы перемещения и положение неполного хода или зону неполного хода. Прибор также корректирует скорость изменения сигнала системы управления для изменения режима работы клапана, когда сигнал системы управления находится в области отсечки, а затем переключается в режим управления перемещением. Используя оценку накопления интегрирующего устройства прибора, прибор корректирует смещение выхода, когда оценка накопления интегрирующего устройства прибора и сигнал системы управления по существу постоянны. После окончания перемещения вводится сигнал системы управления, прибор выполняет корректировку расчетных конечных положений, а затем восстанавливает скорость изменения сигнала системы управления для завершения калибровки прибора.
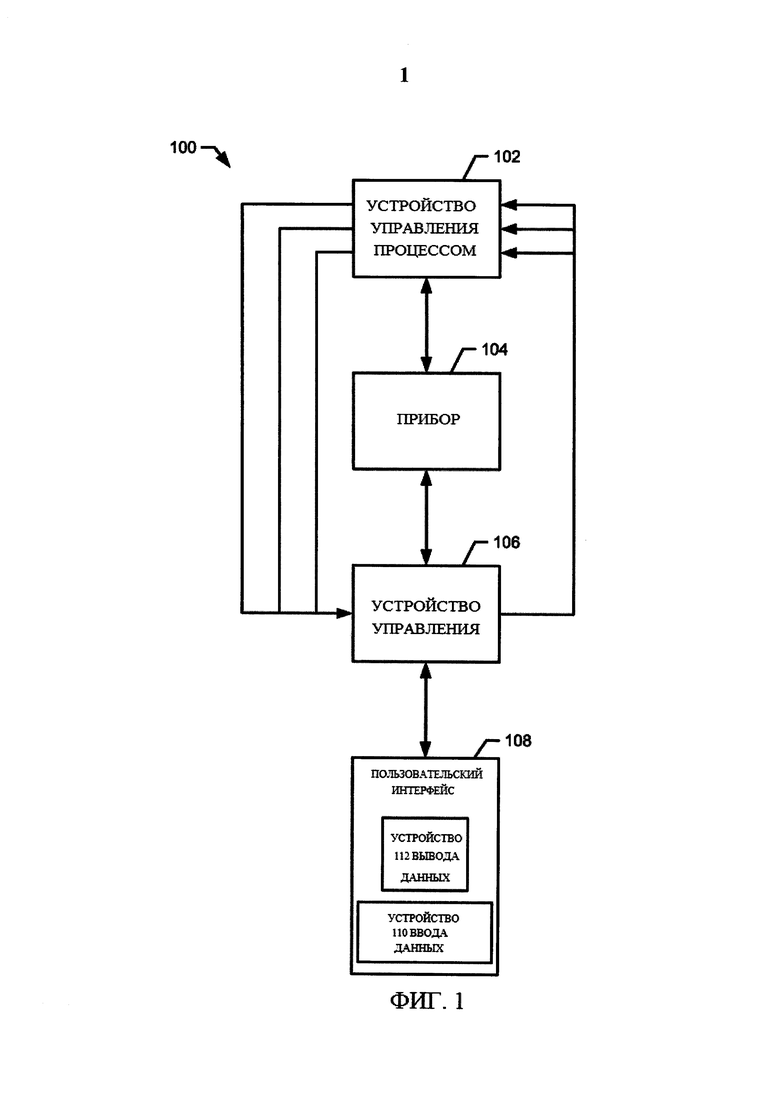
[0018] На фиг. 1 показан вариант осуществления системы 100 управления процессом, которая может быть использована для реализации вариантов осуществления способов и устройства, раскрытых в настоящем документе. В показанном на фиг. 1 примере устройство 102 управления процессом, прибор 104, устройство 106 управления и пользовательский интерфейс 108 могут сообщаться посредством, например, проводных или беспроводных линий. В частности, вариант осуществления устройства 102 управления процессом, вариант осуществления прибора 104 и/или вариант осуществления устройства 106 управления по фиг. 1 могут сообщаться посредством шины данных (например, FOUNDATION Fieldbus™, HART™, Profibus™, Modbus™, Devicenet™ и др.) или локальной компьютерной сети (LAN).
[0019] Прибор 104 на фиг. 1 получает сигнал системы управления от устройства 106 управления и передает откорректированный выходной сигнал (например, давления) к устройству 102 управления процессом. Прибор 104 может быть цифровым клапанным механизмом позиционирования (DVP) и/или цифровым клапанным управляющим устройством (DVC). Как вариант, прибор 104 и устройство 106 управления могут быть объединены и/или встроены, например, в устройство управления DeltaV™.
[0020] Устройство 106 управления выводит сигналы системы управления на основании данных, принятых и/или полученных от устройства 102 управления процессом, прибора 104 и/или пользовательского интерфейса 108. В некоторых вариантах осуществления устройство 106 управления также передает информацию (например, команды) к прибору 104 и/или выводит информацию (например, предупредительные сообщения) на пользовательский интерфейс 108.
[0021] Вариант осуществления устройства 102 управления процессом на фиг. 1 может быть любым количеством устройств ввода и/или устройств вывода. В некоторых вариантах осуществления устройство ввода содержит клапанный узел (например, пневматический клапан и пневматический привод) и/или другие устройства, а устройства вывода содержат механизмы позиционирования клапана, устройства управления клапаном и/или другие устройства.
[0022] Вариант осуществления пользовательского интерфейса 108 на фиг. 1 представляет собой любое устройство, которое обрабатывает входные и выходные сигналы, такое как, например, компьютер, рабочая станция, сервер и/или мобильное устройство и др. Введенные пользователем данные могут передаваться к пользовательскому интерфейсу 108 с помощью устройства 110 ввода данных, такого как, например, клавиатура, электронное перо, мышь и/или сенсорный экран и др. Выходной сигнал от пользовательского интерфейса 108 может сообщаться пользователю с помощью устройства 112 вывода данных, такого как, например, монитор (например, отображение предупредительного сообщения) и/или динамик (например, создание звукового предупредительного сигнала), и др.
[0023] Хотя на фиг. 1 показан один вариант осуществления прибора 104 и вариант осуществления устройства 106 управления, в вариант осуществления системы 100 управления процессом на фиг. 1 может быть включен один или больше дополнительных приборов 104 и/или устройств 106 управления, без отклонения от принципов настоящего изобретения.
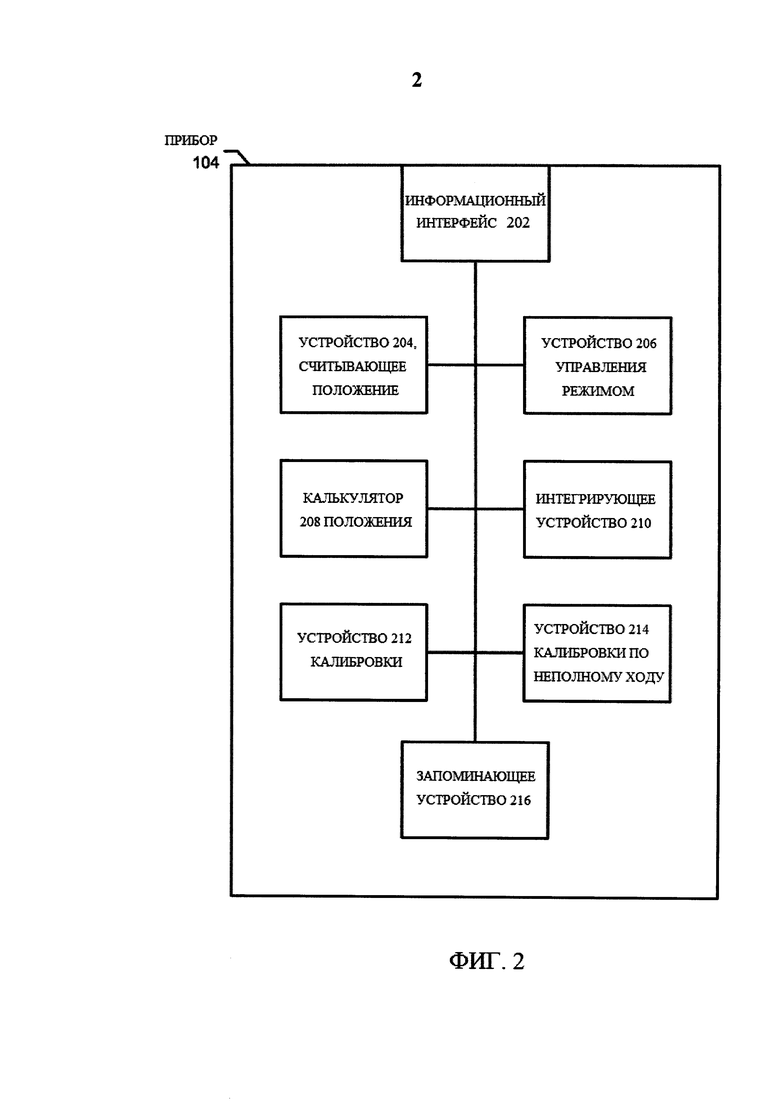
[0024] Фиг. 2 - блок-схема варианта осуществления прибора 104 по фиг. 1. В показанном примере прибор 104 откалиброван для устройства управления процессом, такого как клапанный узел, для обеспечения точного действия устройства управления процессом в рамках процесса. Прибор 104 (например, механизм позиционирования, такой как цифровой клапанный механизм позиционирования или цифровое клапанное управляющее устройство) содержит информационный интерфейс 202, устройство 204, считывающее положение, устройство 206 управления режимом, калькулятор 208 положения, интегрирующее устройство 210, устройство 212 калибровки, устройство 214 калибровки по неполному ходу и запоминающее устройство 216.
[0025] После установки (например, функционального подключения к устройству управления процессом и к устройству управления), прибор 104 автоматически собирает информацию об устройстве управления процессом, к которому он подключен через информационный интерфейс 202. Процесс калибровки прибора может также инициироваться вручную. Например, прибор 104 может получать информацию от клапанного узла (например, клапана и привода) относительно клапана и привода, такую как тип привода (например, пневматический привод), диапазон давления привода (например, 3 фунт/кв. дюйм - 15 фунт/кв. дюйм), длина хода клапана (например, два дюйма), диапазон датчика перемещения, отклонение реле и др., через информационный интерфейс 202. В некоторых вариантах осуществления информационный интерфейс 202 получает вышеупомянутую информацию через устройство радиочастотной идентификации (RFID) (например, управляющий код). В других вариантах осуществления информационный интерфейс 202 получает информацию через устройство считывания штрих-кода или через систему Bluetooth. Однако информация может быть передана от устройства управления процессом к прибору 104, используя любую другую подходящую технологию. Кроме того, в некоторых случаях пользователь может ввести информацию прямо в прибор 104 с помощью, например, интерфейса ввода (например, клавиатуры или мобильного устройства), включенного в информационный интерфейс 202. В некоторых вариантах осуществления информационный интерфейс 202 записывает собранную информацию в регистр, локальную память/или запоминающее устройство, такое как запоминающее устройство 216. В некоторых вариантах осуществления запоминающее устройство 216 представляет собой энергонезависимую память. Как более подробно описано ниже, записанная информация может быть использована в расчетах для выполнения калибровки, например, для расчета корректировок на основании сравнений с ожидаемым значением.
[0026] В некоторых вариантах осуществления информационный интерфейс 202 определяет, записывало ли ранее запоминающее устройство 216 информацию относительно устройства управления процессом. Если запоминающее устройство 216 содержит ранее записанную информацию, информационный интерфейс 202 сравнивает вновь полученную информацию с ранее записанной информацией. Если вновь полученная информация и ранее записанная информация одинакова, информационный интерфейс 202 выводит указание, что прибор 104 был предварительно калиброван и остается откалиброванным для устройства управления процессом. В противном случае, если запоминающее устройство 216 не содержит ранее записанной информации, или ранее записанная информация не такая же, как новая информация, информационный интерфейс 202 выводит указание, чтобы продолжить калибровку прибора 104 для устройства управления процессом. В некоторых случаях информационный интерфейс 202 может выводить указание, что калибровка устройства управления процессом является безопасной.
[0027] В показанном примере прибор 104 также определяет, находится ли клапан на одном конце перемещения (например, в полностью открытом или полностью закрытом положении), когда он установлен. Например, устройство 204, считывающее положение, получает сигнал системы управления от устройства управления (например, системы управления, такой как распределенная система управления (DCS) и/или вариант осуществления устройства 106 управления). Устройство 204, считывающее положение, также получает данные о диапазоне выходного сигнала устройства управления от запоминающего устройства 216. Например, устройство 106 управления может действовать в диапазоне от 4 миллиампер до 20 миллиампер (мА). В показанном примере устройство 204, считывающее положение, сравнивает сигнал системы управления с диапазоном и определяет, находится ли клапан в конце перемещения. Например, сигнал системы управления 4 мА или 20 мА соответствует положению клапана, находящегося в конце перемещения, тогда как сигнал системы управления между 4 мА и 20 мА показывает, что положение клапана не находится в конце перемещения. В показанном примере, поскольку прибор установлен, находясь под ручным управлением (например, пользователь удерживает клапан в одном положении для замены прибора), прибор имеет возможность полагаться на сравнение сигнала системы управления с диапазоном, чтобы определить, находится ли положение клапана в конце перемещения. В некоторых вариантах осуществления устройство 204, считывающее положение, записывает положение клапана в регистр, локальную память и/или вариант осуществления запоминающего устройства 216.
[0028] В некоторых вариантах осуществления устройство 204, считывающее положение, получает сигнал обратной связи, представляющий положение (например, сигнал обратной связи по перемещению) устройства управления процессом, от датчика, функционально связанного с устройством управления процессом. Например, датчик перемещения, функционально связанный с клапанным узлом, может сообщать сигнал обратной связи по перемещению, полученный устройством 204, считывающим положение.
[0029] В показанном на фиг. 2 примере устройство 206 управления режимом получает показание положения и использует это показание положения для определения рабочего режима варианта осуществления прибора 104. Например, устройство 206 управления режимом получает показание положения устройства управления процессом от сигнала системы управления, соответствующего концу перемещения. В некоторых вариантах осуществления, когда положение устройства управления процессом (например, клапанного узла) находится в конце перемещения (например, полностью открытое или полностью закрытое положение), прибор 104 выполняет калибровку в режиме управления перемещением, в котором сигнал обратной связи, представляющий положение клапана, используется для управления клапаном. В других вариантах осуществления, где клапан не находится в конце перемещения, прибор 104 может выполнять калибровку в режиме управления давлением, в котором прибор 104 для управления положением клапана использует сигнал обратной связи, представляющий давление, создаваемое для привода.
[0030] Калькулятор 208 положения рассчитывает положение устройства управления процессом, используя, например, информацию, полученную от устройства управления процессом (например, длина хода клапана). Например, калькулятор 208 положения получает показание от устройства 206 управления режимом, что прибор 104 действует в режиме управления перемещением. Используя информацию о длине хода, полученную, например, от клапанного узла, калькулятор 208 положения использует известное конечное положение от устройства 204, считывающего положение, и рассчитывает другое конечное положение (например, другое полностью открытое положение или полностью закрытое положение). В некоторых случаях калькулятор 208 положения рассчитывает положение неполного хода и/или зону неполного хода (например, диапазон, включающий положение неполного хода) на основании известного конечного положения и другого конечного положения. Например, калькулятор 208 положения рассчитывает положение середины хода, используя два конечных положения клапана, и рассчитывает зону неполного хода в пределах, например, двух процентов от положения середины хода (например, плюс или минус два процента от положения середины хода). В некоторых случаях калькулятор 208 положения записывает зону неполного хода в регистр, локальную память и/или вариант осуществления запоминающего устройства 216.
[0031] В некоторых случаях калькулятор 208 положения получает сигнал системы управления от устройства управления, такого как вариант осуществления устройства 106 управления на фиг. 1. В показанном примере положение устройства управления процессом соответствует сигналу системы управления, который может быть получен с помощью информационного интерфейса 202, когда прибор 104 установлен. Используя информацию о сигнале системы управления, известном диапазоне сигнала системы управления и длине хода, полученную от устройства управления процессом (например, варианта осуществления устройства 102 управления процессом), калькулятор 208 положения рассчитывает ожидаемое положение устройства управления 102 процессом. Например, калькулятор 208 положения может получать сигнал системы управления 12 мА от устройства 106 управления, получать информацию от запоминающего устройства 216, что диапазон сигнала системы управления от варианта осуществления устройства 106 управления составляет 4-20 мА, и информацию, показывающую, что длина хода устройства 102 управления процессом составляет два дюйма. В этом случае калькулятор 208 положения сравнивает сигнал системы управления (12 мА) с диапазоном сигнала системы управления (4-20 мА) и рассчитывает положение (например, ожидаемое положение) устройства управления процессом, являющееся положением середины хода (например, при пятидесяти процентах от максимального перемещения).
[0032] В показанном на фиг. 2 примере интегрирующее устройство 210 контролирует положения, соответствующие сигналу системы управления, и сигнал обратной связи по перемещению, и показывает, когда два положения равны. Интегрирующее устройство 210 рассчитывает разность между ожидаемым положением и текущим положением и добавляет разность к оценке накопления интегрирующего устройства прибора. Интегрирующее устройство 210 суммирует рассчитанные разности, пока два положения не будут равны (например, разность равна нулю). Таким образом, оценка накопления интегрирующего устройства прибора представляет корректировку для минимизации разности во время следующего расчета. Оценка накопления интегрирующего устройства прибора показывает, что два положения равны, когда величина оценки накопления интегрирующего устройства прибора не изменяется (например, прибавление нулей). Оценка накопления интегрирующего устройства прибора сохраняется в запоминающем устройстве 216. В некоторых вариантах осуществления оценка накопления интегрирующего устройства прибора сбрасывается (например, устанавливается на ноль), как только оценка накопления интегрирующего устройства прибора записана.
[0033] В показанном на фиг. 2 примере устройство 212 калибровки рассчитывает корректировку смещения выхода, необходимую для завершения калибровки прибора для устройства управления процессом. Если положение клапана находится в пределах зоны неполного хода, сигнал системы управления и оценка накопления интегрирующего устройства прибора являются по существу постоянными, смещение выхода (например, корректировка сигнала системы управления для согласования сигнала системы управления и сигнала обратной связи по перемещению) регулируется на основании оценки накопления интегрирующего устройства прибора, и интегрирующее устройство 210 устанавливается (или сбрасывается) на ноль. Устройство 212 калибровки не пытается рассчитывать смещение выхода, в то время как сигнал системы управления изменяется, и/или текущее положение не согласовано с положением, соответствующим сигналу системы управления, и оценка накопления интегрирующего устройства прибора изменяется. Новое значение смещения выхода затем сохраняется в запоминающем устройстве 216 для завершения калибровки варианта осуществления прибора 104 для устройства управления процессом.
[0034] В показанном примере, когда устройство 206 управления режимом определяет, что положение устройства 102 управления процессом не находится в конце перемещения, устройство 206 управления режимом запускает устройство 214 калибровки по неполному ходу. Устройство 214 калибровки по неполному ходу выполняет калибровку в режиме управления давлением. Как описано ниже со ссылками на фиг. 3, тогда как прибор 104 находится в режиме управления давлением, прибор 104 выполняет калибровку, используя сигналы обратной связи по давлению, а не сигналы обратной связи по перемещению.
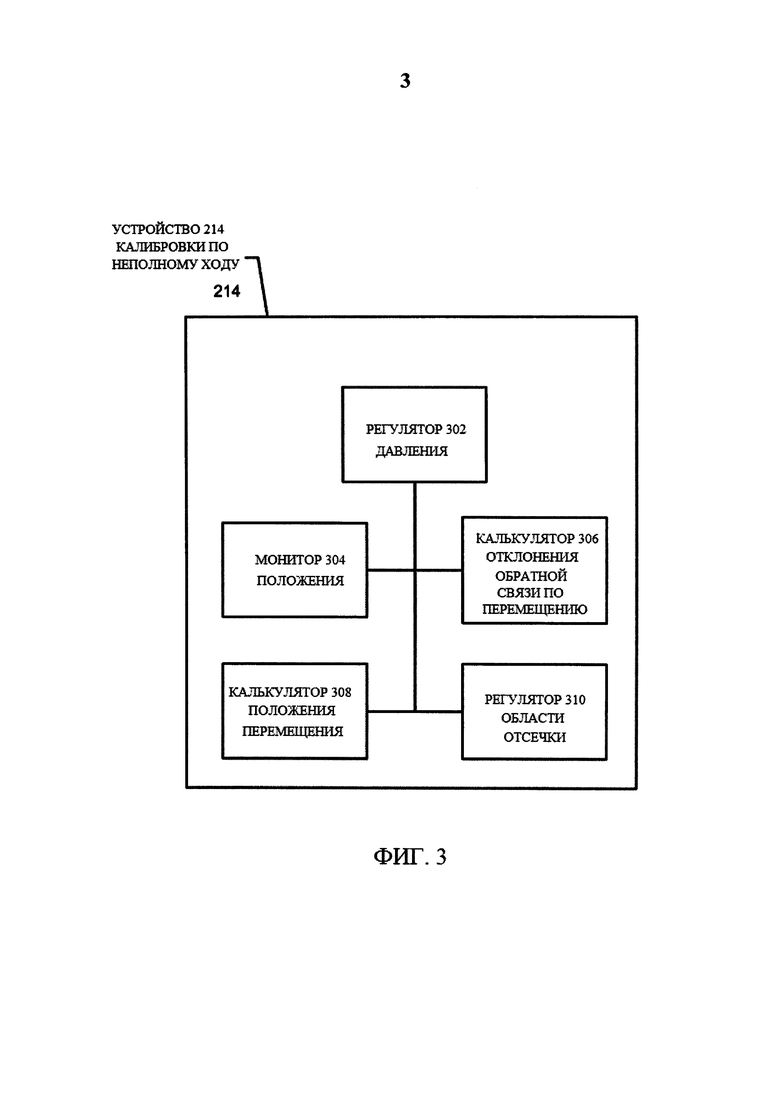
[0035] Фиг. 3 - блок-схема варианта реализации устройства 214 калибровки по неполному ходу по фиг. 2. В иллюстрируемом примере устройство 214 калибровки по неполному ходу изменяет выходное давление, не принимая во внимание сигнал обратной связи по перемещению, полученный прибором 104. Таким образом, прибор 104 управляет давлением, получаемым устройством 102 управления процессом, и выполняет регулировки для корректировки любых несоответствий между целевым выходным давлением и сигналом обратной связи по давлению. Например, выходное давление от прибора 104 может отличаться от давления, полученного устройством 102 управления процессом, вследствие свойств системы управления процессом. Например, расстояние между прибором 104 и устройством 102 управления процессом может приводить к тому, что выходное давление будет отличаться от давления, получаемого устройством 102 управления процессом. Устройство 214 калибровки по неполному ходу содержит регулятор 302 давления, монитор 304 положения, калькулятор 306 отклонения обратной связи по перемещению, калькулятор 308 положения перемещения и регулятор 310 области отсечки.
[0036] При выполнении калибровки в режиме управления давлением вариант осуществления регулятора 302 давления регулирует давление, получаемое устройством 102 управления процессом (например, клапанным узлом). Например, путем получения сохраненного диапазона давления клапанного узла от запоминающего устройства 216, регулятор 302 давления может рассчитывать выходной сигнал (например, целевое выходное давление), соответствующий сигналу системы управления, полученному прибором 104. Например, когда принимаемый диапазон давления привода составляет 3-15 фунт/кв. дюйм, а прибор 104 принимает сигнал системы управления 4 мА (например, от устройства 106 управления), регулятор 302 давления рассчитывает целевое выходное давление 3 фунт/кв. дюйм. Кроме того, при выполнении калибровки регулятор 302 давления может увеличивать и/или уменьшать выходное давление для определения того, вызывает ли новое выходное давление изменение положения клапана.
[0037] Монитор 304 положения обнаруживает любые изменения в устройстве 102 управления процессом (например, положении клапана) на основании выходного давления. Например, монитор 304 положения контролирует положение клапана, в то время как регулятор 302 давления увеличивает выходное давление. Как вариант, монитор 304 положения может контролировать положение клапана, в то время как регулятор 302 давления уменьшает выходное давление. Если обнаружено изменение в положении клапана, монитор 302 положения записывает направление изменения в положении клапана и выходное давление, вызывающее изменение. В некоторых случаях монитор 304 положения может оценивать зону нечувствительности (например, диапазон сигнала, за пределами которого изменение положения не обнаруживается) и/или уровень трения клапанного узла в процессе текущего контроля выходного давления и положения клапана.
[0038] В показанном на фиг. 3 примере монитор 304 положения определяет, превышает ли выходное давление предел безопасности, рассчитанный для устройства 102 управления процессом. Например, выходное давление, превышающее предел безопасности, может указывать на неисправно работающий компонент в системе управления давлением. Если выходное давление превышает предел безопасности, устройство 214 калибровки по неполному ходу прерывает калибровку и подает предупредительный или тревожный сигнал.
[0039] Вариант осуществления калькулятора 306 отклонения обратной связи по перемещению рассчитывает среднее выходное давление (например, средний сигнал) на основании выходного давления, записанного монитором 304 положения. Калькулятор 306 отклонения обратной связи по перемещению сравнивает среднее выходное давление с диапазоном давления привода и оценивает положение клапана. Калькулятор 306 отклонения обратной связи по перемещению также рассчитывает текущее положение клапана на основании сигнала обратной связи по перемещению и отклонения перемещения по умолчанию, равного нулю. Разность между оценочным положением клапана и текущим положением клапана записывается (например, сохраняется в запоминающем устройстве 216), как отклонение обратной связи по перемещению. Отклонение обратной связи по перемещению является корректировкой прибора 104, выполненной для выходного давления таким образом, чтобы положение клапана, соответствующее выходному давлению, совпадало с положением клапана, полученным, например, от сигнала обратной связи по перемещению датчиком перемещения, соединенным с устройством 102 управления процессом.
[0040] В показанном примере калькулятор 308 положения перемещения рассчитывает полностью открытое и полностью закрытое положения устройства 102 управления процессом, используя текущее положение, длину хода клапана, диапазон давления привода и отклонение обратной связи по перемещению. Как описано выше, выходное давление соответствует положению клапана. Регулируя текущее положение с помощью отклонения обратной связи по перемещению, калькулятор 308 положения перемещения рассчитывает выходное давление, соответствующее положению клапана. Затем положение клапана может сравниваться с длиной хода клапана для определения конечного положения клапана. Используя соответствующий диапазон давления привода, калькулятор 308 положения перемещения рассчитывает выходное давление, соответствующее конечному положению. Калькулятор 308 положения перемещения использует конечное положение для расчета другого конечного положения и соответствующего выходного давления.
[0041] В показанном примере, тогда как прибор 104 выполняет калибровку, регулятор 310 области отсечки определяет, как действует устройство управления процессом, когда сигнал системы управления находится в переделах области отсечки. Область отсечки используется для предотвращения, например, эрозии седла клапана, которая возникает, если клапан остается частично открытым, когда положение клапана должно быть в полностью закрытом положении. Соответственно, когда сигнал системы управления находится в пределах области отсечки, регулятор 310 области отсечки изменяет сигнал системы управления таким образом, что положение клапана находится в полностью открытом или полностью закрытом положении. Во время нормальной работы (например, без выполнения калибровки), когда сигнал системы управления достигает области отсечки, скорость изменения сигнала системы управления является резкой. Это происходит потому, что прибор 104 калибруется, и прибор 104 рассчитывает корреляцию между сигналом обратной связи по перемещению и сигналом системы управления. Иначе говоря, конечное положение известно, и прибор 104 может точно определять выходной сигнал, соответствующий конечному положению, без соударения, например, запирающего элемента клапана с седлом клапана в устройстве 102 управления процессом.
[0042] Однако при выполнении калибровки прибора, когда прибор 104 находится в зоне неполного хода, корреляция сигнала системы управления с сигналом обратной связи по перемещению неизвестна (например, рассчитанные конечные точки в концах перемещения могут быть неточными). В показанном примере область отсечки действует как буфер для предотвращения, например, соударения запирающего элемента клапана с седлом и возможного повреждения связанных компонентов. Итак, калькулятор 310 области отсечки корректирует скорость изменения сигнала системы управления до сравнительно большей постепенной скорости изменения, таким образом, предотвращая случайное столкновение запирающего элемента клапана с седлом из-за неточно рассчитанных конечных точек.
[0043] В показанном примере область отсечки рассчитана, используя заранее заданное процентное отношение. Например, применяя область отсечки пять процентов (5%) для диапазона сигнала системы управления 4-20 мА, калькулятор 310 области отсечки рассчитывает диапазон отсечки при закрывании (4-4,8 мА) и диапазон отсечки при открывании (19,2-20 мА). Во время нормальной работы (например, без выполнения калибровки), когда сигнал системы управления находится либо в пределах областей отсечки (например, сигнал системы управления составляет 4,7 мА), прибор 104 изменяет сигнал системы управления от 4,7 мА до 4 мА очень резко (например, вызывает внезапное выпускание приводом всего воздуха в приводе). В результате известного и калиброванного полностью закрытого конечного положения прибор 104 направляет запирающий элемент клапана в полностью закрытое положение без соударения с седлом клапана (например, прибор 104 останавливает запирающий элемент клапана в калиброванном полностью закрытом положении). Однако во время калибровки регулятор 310 области отсечки постепенно изменяет сигнал системы управления от 4,7 мА до 4 мА, таким образом, не допуская соударения запирающего элемента клапана с седлом клапана вследствие более высокой скорости, чем ожидалось, при поступлении к седлу.
[0044] Затем прибор переключается из режима управления давлением в режим управления перемещением. В результате прибор 104 использует сигнал обратной связи по перемещению как главную обратную связь для расчета смещения выхода. В некоторых случаях калькулятор 208 положения рассчитывает заданное значение, равное положению, соответствующему сигналу обратной связи по перемещению, а затем постепенно изменяет заданное значение до согласования с сигналом системы управления, таким образом, обеспечивая возможность плавного переключения из режима управления давлением в режим управления перемещением.
[0045] Хотя на фиг. 1-3 иллюстрирован вариант осуществления способа реализации системы 100 управления процессом, один или больше элементов, процессов и/или устройств, показанных на фиг. 2 и 3, могут быть объединены, разделены, перегруппированы, пропущены, исключены и/или реализованы любым другим способом. Кроме того, вариант осуществления устройства 204, считывающего положение, вариант осуществления устройства 206 управления режимом, вариант осуществления калькулятора 208 положения, вариант осуществления интегрирующего 210 устройства, вариант осуществления устройства 212 калибровки, вариант осуществления устройства 214 калибровки по неполному ходу, вариант осуществления регулятора 302 давления, вариант осуществления монитора 304 положения, вариант осуществления калькулятора 306 отклонения обратной связи по перемещению, вариант осуществления калькулятора 308 положения перемещения, вариант осуществления регулятора 310 области отсечки и/или в более общем смысле, вариант осуществления системы 100 управления процессом по фиг. 1-3 может быть реализован с помощью аппаратуры, программного обеспечения, встроенного программного обеспечения и/или любого сочетания аппаратуры, программного обеспечения и/или встроенного программного обеспечения. Таким образом, например, любой из вариантов осуществления устройства 204, считывающего положение, вариантов осуществления устройства 206 управления режимом, вариантов осуществления калькулятора 208 положения, вариантов осуществления интегрирующего 210 устройства, вариантов осуществления устройства 212 калибровки, вариантов осуществления устройства 214 калибровки по неполному ходу, вариантов осуществления регулятора 302 давления, вариантов осуществления монитора 304 положения, вариантов осуществления калькулятора 306 отклонения обратной связи по перемещению, вариантов осуществления калькулятора 308 положения перемещения, вариантов осуществления регулятора 310 области отсечки и/или в более общем смысле, варианта осуществления системы 100 управления процессом по фиг. 1-3 может быть реализован с помощью одного или большего количества контуров, программируемых обрабатывающих устройств, применения конкретных интегральных микросхем (ASIC), программируемых логических устройств (PLD) и/или логических устройств, программируемых потребителем (FPLD), и др. Когда любое из устройств или систем, заявленных в настоящем патенте, интерпретируется для охвата исключительно программного и/или встроенного программного обеспечения, по меньшей мере один из вариантов осуществления, вариант осуществления устройства 204, считывающего положение, вариант осуществления устройства 206 управления режимом, вариант осуществления калькулятора 208 положения, вариант осуществления интегрирующего устройства 210, вариант осуществления устройства 212 калибровки, вариант осуществления устройства 214 калибровки по неполному ходу, вариант осуществления регулятора 302 давления, вариант осуществления монитора 304 положения, вариант осуществления калькулятора 306 отклонения обратной связи по перемещению, вариант осуществления калькулятора 308 положения перемещения и/или вариант осуществления регулятора 310 области отсечки, таким образом, четко определены для включения материального компьютерного программоносителя, такого как запоминающее устройство, цифровой видеодиск (DVD), компакт-диск (CD), диск Blu-ray и др., запоминающее программное и/или аппаратное обеспечение. Кроме того, вариант осуществления системы 100 управления процессом по фиг. 1-3 может содержать один или больше элементов, процессов и/или устройств в дополнение к тем или вместо тех, которые показаны на фиг. 1-3, и/или может содержать больше, чем один из всех или из части показанных элементов, процессов и устройств.
[0046] Фиг. 4 и 5 - блок-схемы, представляющие вариант осуществления способов, раскрытых в настоящем документе. Некоторые или все примеры способов по фиг. 4 и 5 могут выполняться с помощью обрабатывающего устройства, прибора 104, устройства 106 управления и/или любого другого подходящего обрабатывающего устройства. В некоторых случаях все или некоторые из вариантов осуществления способов по фиг. 4 и 5 реализованы в кодированных командах, сохраняемых на материальном машинодоступном или машиночитаемом носителе, таком как флэш-память, постоянное запоминающее устройство (ROM) и/или запоминающее устройство с произвольной выборкой (RAM), связанных с обрабатывающим устройством. Как вариант, некоторые или все варианты осуществления способов по фиг. 4 и 5 могут быть реализованы, используя любые сочетания применения конкретных интегральных схем (ASIC), программируемых логических устройств (PLD), логических устройств, программируемых потребителем (FPLD), дискретной логики, аппаратных средств, встроенного программного обеспечения и др. Кроме того, одна или больше операций, изображенных на фиг. 4 и 5, могут быть выполнены вручную или как любое сочетание любых предшествующих методов, например, любое сочетание встроенного программного обеспечения, программного обеспечения, дискретной логики и/или аппаратного обеспечения. Кроме того, хотя варианты осуществления способов описаны со ссылками на блок-схемы, показанные на фиг. 4 и 5, могут быть использованы многие другие способы выполнения примеров способов. Например, порядок выполнения этапов может быть изменен, и/или некоторые из описанных этапов могут быть изменены, исключены, подразделены или объединены. Кроме того, любые или все из вариантов осуществления способов по фиг. 4 и 5 могут быть выполнены последовательно и/или выполнены параллельно, с помощью, например, отдельных потоков обработки, обрабатывающих устройств, устройств, дискретной логики, контуров и др.
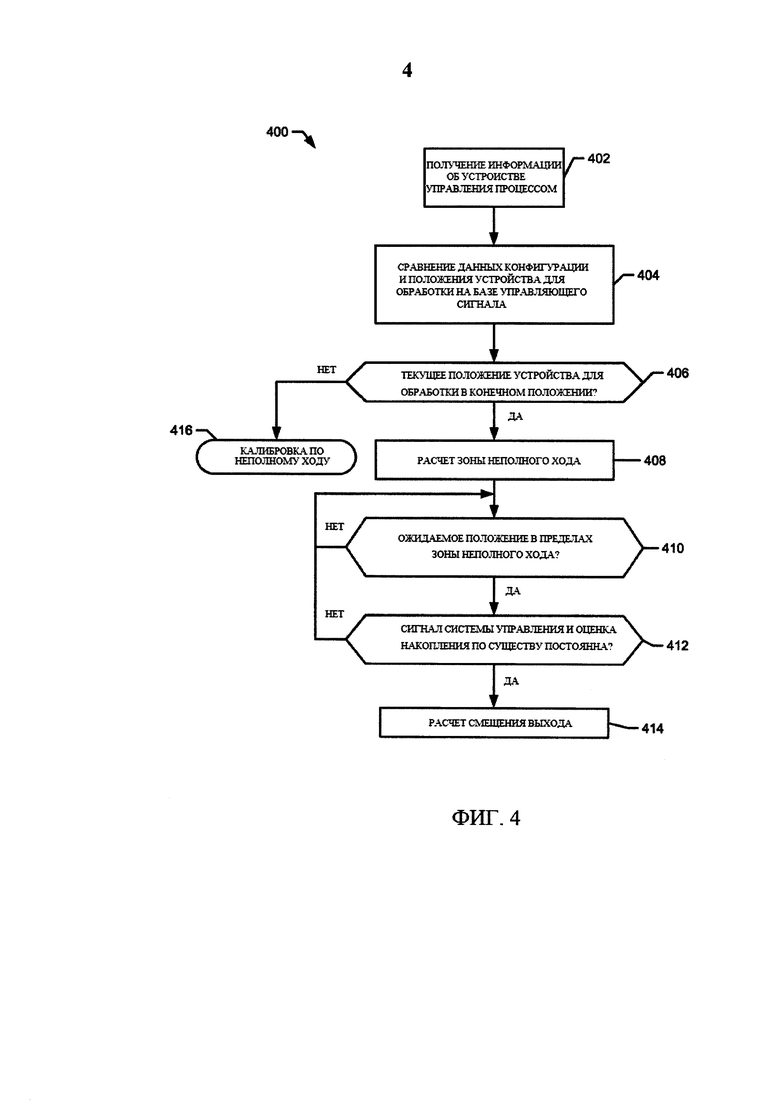
[0047] Со ссылками на фиг. 1-3, вариант осуществления способа или процесса 400 по фиг. 4 начинается с этапа 402 путем получения информации об устройстве управления процессом, таком как вариант осуществления устройства 102 управления процессом. В некоторых случаях информация получается через радиочастотное идентификационное устройство (например, управляющий код). На этапе 404 полученная информация сравнивается с первоначально записанной информацией для определения того, является ли информация одинаковой. Например, никакие устройства управления процессом не могут быть изменены с момента предыдущей калибровки, как следствие, калибровка не требуется. Используя записанную информацию и сигнал системы управления от варианта осуществления устройства 106 управления, определяется положение устройства управления процессом. Например, положение может быть в конечном положении (например, полностью закрытом или полностью открытом положении) или может быть в зоне неполного хода (например, между полностью закрытым и полностью открытым положением).
[0048] На этапе 406 устройство 206 управления режимом определяет, находится ли клапан в конечном положении. Если клапан не находится в конечном положении, на этапе 416 прибор 104 выполняет калибровку по неполному ходу. Если клапан находится в конечном положении, на этапе 408 вариант осуществления прибора 104 действует в режиме управления перемещением, а вариант осуществления калькулятора 208 положения рассчитывает другое конечное положение клапана. Используя два конечных положения, вариант осуществления калькулятора 208 также рассчитывает зону неполного хода клапана (этап 408). Например, калькулятор 208 положения рассчитывает зону неполного хода в пределах двух процентов от положения середины хода (т.е., положение клапана в середине пути между конечными положениями).
[0049] На этапе 410 вариант осуществления устройства 212 калибровки определяет, находится ли в зоне неполного хода ожидаемое положение, рассчитанное, используя сигнал системы управления, полученный от устройства 106 управления. Если ожидаемое положение не находится в зоне неполного хода, на этапе 410 устройство 212 калибровки продолжает контролировать ожидаемое положение. Если ожидаемое положение находится в зоне неполного хода, на этапе 412 вариант осуществления устройства 212 калибровки определяет, является ли по существу постоянным сигнал системы управления (например, ожидаемое положение) и оценка накопления интегрирующего устройства прибора. Например, клапан может кратковременно проходить через зону неполного хода, или интегрирующее устройство 210 может показывать, что положения, соответствующие сигналу системы управления, и сигналу обратной связи по перемещению, не равны (например, интегрирующее устройство 210 добавляет ненулевую разность между двумя положениями к оценке накопления интегрирующего устройства прибора). Если сигнал системы управления (например, ожидаемое положение) и/или оценка накопления интегрирующего устройства прибора по существу не постоянны, на этапе 412 вариант осуществления устройства 212 калибровки возвращается к продолжению контроля ожидаемого положения (этап 410).
[0050] Если сигнал системы управления и оценка накопления интегрирующего устройства прибора по существу постоянны, на этапе 412 устройство 212 калибровки рассчитывает новое смещение выхода путем корректирования ранее сохраненного выходного смещения с помощью оценки накопления интегрирующего устройства прибора, и сбрасывает интегрирующее устройство 210 на ноль (этап 414). Новое значение смещения выхода записывается в запоминающем устройстве, таком как энергонезависимая память и/или запоминающее устройство 216.
[0051] Вариант осуществления способа или процесса 500 на фиг. 5 начинается на этапе 502 с расчета целевого выходного давления. Например, регулятор 302 давления вычисляет целевое выходное давление, соответствующее сигналу системы управления, полученному от устройства 106 управления. На этапе 504 устройство 206 управления режимом устанавливает прибор в режим управления давлением и запускает устройство 214 калибровки по неполному ходу путем выполнения калибровки в режиме управления давлением.
[0052] На этапе 506 регулятор 302 давления корректирует выходное давление путем увеличения и/или уменьшения выходного давления до тех пор, пока сигнал обратной связи по давлению, соответствующий выходному давлению, не будет равен целевому выходному давлению, соответствующему сигналу системы управления. Затем регулятор 302 давления медленно увеличивает и уменьшает выходное давление, в то же время, наблюдая за сигналом обратной связи по перемещению для изменений. Например, регулятор 302 давления может увеличивать и/или уменьшать выходное давление части диапазона давления. На этапе 508 монитор 304 положения контролирует положение клапана для каждой корректировки выходного давления. Если монитором 304 положения не обнаружены изменения в положении клапана, на этапе 510 монитор 304 положения определяет, не превышает ли выходное давление предел безопасности. Если выходное давление превышает предел безопасности, на этапе 512 прибор 104 прерывает калибровку и передает тревожное сообщение на пользовательский интерфейс 108. Если выходное давление не превышает предел безопасности, регулятор 302 давления корректирует выходное давление на этапе 506.
[0053] Если монитор 304 положения обнаруживает изменения в положении клапана, на этапе 514 монитор 304 положения определяет направление перемещения, когда выходное давление увеличивается и уменьшается регулятором 302 давления. В некоторых случаях монитор 304 положения также оценивает зону нечувствительности (например, диапазон выходного давления, в котором не наблюдается никаких изменений сигнала обратной связи по перемещению) и трение узла. Например, устройство 302 позиционирования может увеличивать выходное давление, пока с помощью монитора 304 положения не будет обнаружено изменение. Устройство 302 позиционирования может затем уменьшать выходное давление, пока с помощью монитора 304 положения не будет обнаружено изменение. Регулятор 302 давления может записывать два выходных давления (например, сохранять в запоминающем устройстве 216), а также среднее выходное давление на основании двух выходных давлений. На этапе 516 калькулятор 306 отклонения обратной связи по перемещению использует среднее выходное давление для оценки положения клапана на основании выходного давления. Калькулятор 306 отклонения обратной связи по перемещению также рассчитывает текущее положение клапана на основании сигнала обратной связи по перемещению и отклонения перемещения по умолчанию, равного нулю. Разность между оцениваемым положением клапана и текущим положением клапана записывается калькулятором 306 отклонения обратной связи по перемещению, как отклонение обратной связи по перемещению.
[0054] На этапе 518 калькулятор 308 положения перемещения рассчитывает два конечных положения клапана, используя информацию о текущем положении клапана, отклонении обратной связи по перемещению, длине хода и диапазоне давления привода. На этапе 520, когда сигнал системы управления находится в области отсечки, регулятор 310 области отсечки изменяет скорость изменения сигнала системы управления до относительно большей постепенной скорости изменения. Таким образом, при выполнении калибровки клапан не соударяется, например, с седлом клапана.
[0055] На этапе 522 устройство 206 управления режимом вынуждает прибор 104 плавно переключаться в режим управления перемещением, в то же время, выполняя калибровку. На этапе 524 устройство 212 калибровки определяет, находится ли в зоне неполного хода ожидаемое положение, рассчитанное, используя сигнал системы управления. Например, устройство 212 калибровки определяет, соответствует ли сигнал системы управления положению в зоне неполного хода. Если положение не находится в зоне неполного хода, устройство 212 калибровки продолжает контролировать ожидаемое положение. Если положение находится в зоне неполного хода, на этапе 526 устройство 212 калибровки определяет, действительно ли сигнал системы управления (например, ожидаемое положение) является по существу постоянным. Если сигнал системы управления не является по существу постоянным, устройство 212 калибровки продолжает контролировать ожидаемое положение клапана.
[0056] Если сигнал системы управления по существу постоянен, на этапе 528 устройство 212 калибровки определяет, является ли по существу постоянной оценка накопления интегрирующего устройства прибора. Например, интегрирующее устройство 210 добавляет разности (т.е., ненулевые разности) к оценке накопления интегрирующего устройства прибора, поскольку положения, соответствующие сигналу обратной связи по перемещению и сигналу системы управления, не равны. Интегрирующее устройство 210 суммирует разность между двумя положениями в оценке накопления интегрирующего устройства прибора до тех пор, пока разность не будет равняться нулю. Когда два положения становятся равными, интегрирующее устройство 210 сохраняет оценку накопления интегрирующего устройства прибора. Если оценка накопления интегрирующего устройства прибора не является по существу постоянной, устройство 212 калибровки продолжает контролировать ожидаемое положение клапана.
[0057] Если оценка накопления интегрирующего устройства прибора является по существу постоянной, на этапе 530 устройство 212 калибровки корректирует смещение выхода с помощью оценки накопления интегрирующего устройства прибора и сбрасывает оценку накопления интегрирующего устройства прибора на ноль. Новое смещение выхода записывается в запоминающем устройстве 216. На этапе 532 прибор 104 контролирует сигнал системы управления до тех пор, пока не достигается одно из конечных положений. Когда клапан перемещается в конец перемещения (например, полностью открытое или полностью закрытое положение), сигнал обратной связи по перемещению используется для выполнения корректировок для рассчитанных конечных положений. Например, разность между рассчитанным конечным положением и сигналом обратной связи по перемещению используется для точной настройки рассчитанного конечного положения, чтобы точно определять конец перемещения. Используя информацию о длине хода для клапана, соответственно корректируется другое рассчитанное конечное положение. На этапе 534 регулятор 310 области отсечки восстанавливает скорость изменения сигнала системы управления до исходной скорости (например, резкий переход) и завершает калибровку.
[0058] Фиг. 6 - блок-схема варианта осуществления компьютера 600, выполненного с возможностью выполнять способы по фиг. 4 и 5 для реализации устройства по фиг. 1-3. Компьютер 600 может быть, например, сервером, персональным компьютером, мобильным телефоном (например, сотовым телефоном), персональным цифровым секретарем (PDA), устройством для доступа к сети Интернет, DVD-плеером, CD-плеером, цифровым видеомагнитофоном, Blu-ray-плеером, игровой консолью, персональным видеомагнитофоном, декодером каналов кабельного телевидения, или любым другим видом вычислительного устройства.
[0059] Система 600 по данному варианту содержит обрабатывающее устройство 612. Например, обрабатывающее устройство 612 может быть реализовано с помощью одного или большего количества микропроцессоров или устройств управления любого желаемого семейства или производителя.
[0060] Обрабатывающее устройство 612 включает в себя локальную память 613 (например, кэш) и связано с основной памятью, включающей энергозависимую память 614 и энергонезависимую память 616, посредством шины 618. Энергонезависимая память 614 может быть реализована с помощью синхронного динамического запоминающего устройства с произвольной выборкой (SDRAM), динамического запоминающего устройства с произвольной выборкой (DRAM), динамического запоминающего устройства с произвольной выборкой фирмы RAMBUS (RDRAM) и/или любого другого типа устройства памяти с произвольным доступом. Энергонезависимая память 616 может быть реализована с помощью флэш-памяти и/или другого желаемого типа устройства памяти. Доступ к основной памяти 614, 616 регулируется с помощью контроллера памяти.
[0061] Компьютер 600 также содержит схему 620 интерфейса. Схема интерфейса 620 может быть реализована с помощью любого типа интерфейсного стандарта, такого как интерфейс Ethernet, универсальная последовательная шина (USB), и/или последовательный интерфейс PCI express.
[0062] Одно или больше устройств 622 ввода соединено со схемой 620 интерфейса. Устройство (устройства) 622 ввода дают пользователю возможность вводить данные и команды в обрабатывающее устройство 612. Устройства ввода могут быть реализованы, например, с помощью клавиатуры, мыши, сенсорного экрана, сенсорной площадки, шарового манипулятора, пишущего узла и/или системы распознавания речи.
[0063] Одно или большее количество устройств 624 вывода также соединено со схемой 620 интерфейса. Устройства 624 вывода могут быть реализованы, например, с помощью индикаторных устройств (например, жидкокристаллический дисплей, дисплей на электронно-лучевой трубке (CRT), принтер и/или динамики). Схема интерфейса 620, таким образом, как правило, содержит карту графического драйвера.
[0064] Схема 620 интерфейса также содержит устройство связи, такое как модем или сетевая интерфейсная плата для осуществления обмена данными с внешними компьютерами через сеть 626 (например, Ethernet-соединение, цифровая абонентская линия связи (DSL), телефонная линия, коаксиальный кабель, система сотовой телефонной связи и др.).
[0065] Компьютер 600 также содержит одно или больше запоминающих устройств 628 большой емкости для хранения программ и данных. Примеры таких запоминающих устройств 628 включают в себя накопители на гибких дисках, накопители на жестких дисках, накопители на компакт-дисках и накопители на универсальных цифровых дисках (DVD). Запоминающее устройство 628 большой емкости может реализовать локальное запоминающее устройство.
[0066] Кодированные команды 632 по фиг. 4 и 5 для осуществления способов могут храниться в запоминающем устройстве 628 большой емкости, в энергозависимой памяти 614, в энергонезависимой памяти 616, и/или на сменном запоминающем носителе, таком как компакт-диск или цифровой видеодиск.
[0067] Из вышеупомянутого должно быть понятно, что вышеописанные способы, устройства и изделия позволяют автоматически калибровать устройство управления процессом. В результате ввод данных пользователем не нужен для калибровки устройства для обработки, таким образом, уменьшая вероятность вызванной пользователем ошибки.
[0068] Хотя в настоящем документе раскрыты некоторые варианты осуществления способов, устройств и изделий, объем защиты данного патента не ограничивается ими. Напротив, настоящий патент охватывает все способы и изделия, явно подпадающие под объем действия формулы изобретения настоящего патента.
Изобретение относится в целом к системам управления технологическими процессами, конкретнее к способам и устройству для калибровки устройства для обработки. Вариант осуществления способа включает в себя определение того, является ли первое положение устройства управления процессом первым конечным положением, и в ответ на первое положение, являющееся первым конечным положением, расчет второго конечного положения устройства управления процессом на основании первого конечного положения и данных конфигурации. Вариант осуществления способа дополнительно включает в себя расчет зоны неполного хода устройства управления процессом на основании первого конечного положения и второго конечного положения и определение того, когда текущее положение устройства управления процессом находится в пределах зоны неполного хода. Вариант осуществления способа также включает в себя расчет смещения выхода на основании управляющего сигнала и суммарного значения, когда текущее положение находится в пределах зоны неполного хода. Группа изобретений направлена на повышение точности калибровки. 3 н. и 19 з.п. ф-лы, 6 ил.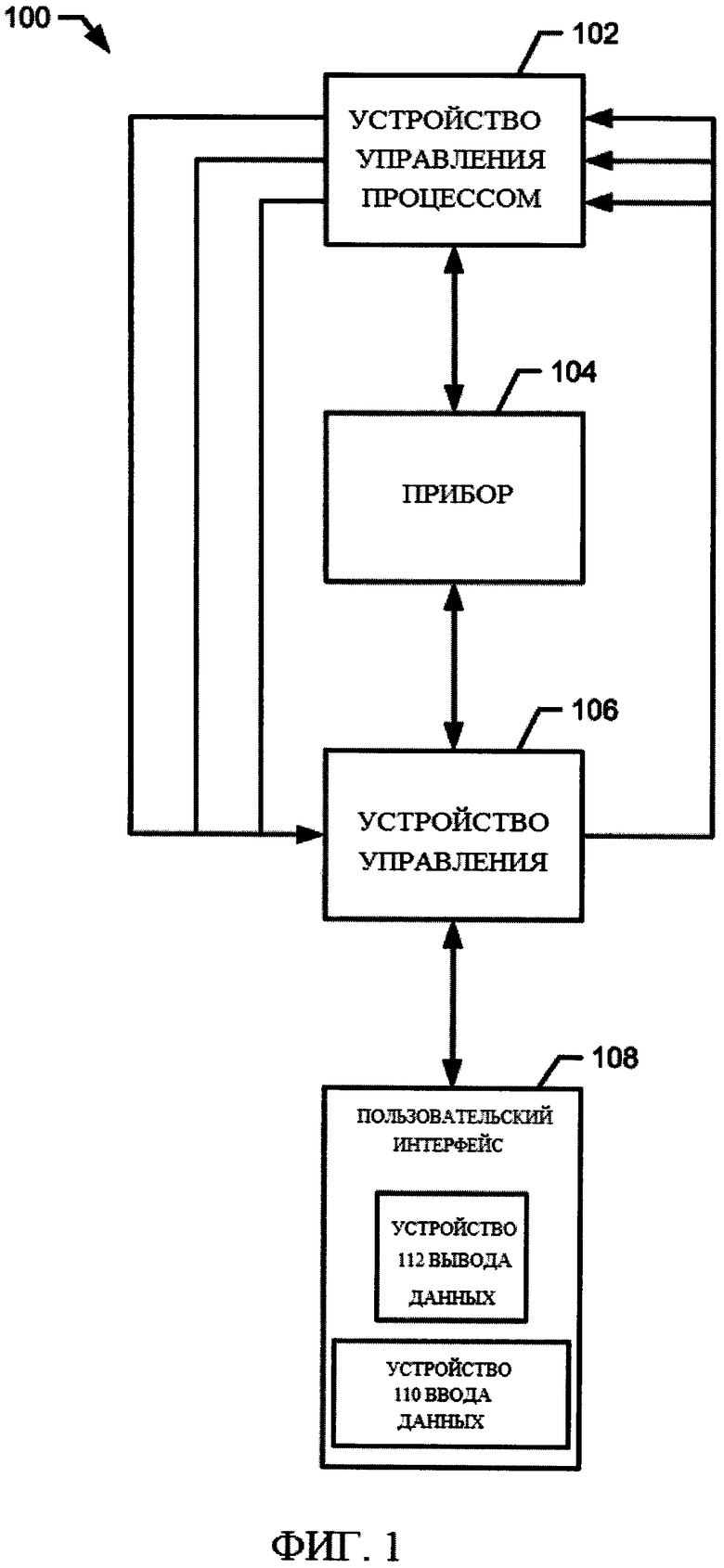
1. Способ, включающий в себя:
определение того, является ли первое положение устройства управления процессом первым конечным положением;
в ответ на то, что первое положение является первым конечным положением, расчет второго конечного положения устройства управления процессом на основании первого конечного положения и данных конфигурации;
расчет зоны неполного хода устройства управления процессом на основании первого конечного положения и второго конечного положения;
определение того, когда текущее положение устройства управления процессом находится в пределах зоны неполного хода, и
когда текущее положение находится в пределах зоны неполного хода, расчет смещения выхода на основании значения, показывающего сравнение текущего положения с управляющим сигналом.
2. Способ по п. 1, дополнительно включающий:
когда первое положение не является первым конечным положением, расчет целевого выходного давления на основании данных конфигурации;
определение того, равно ли давление обратной связи целевому выходному давлению, причем давление обратной связи соответствует выходному сигналу выходного давления от устройства управления процессом, и
когда давление обратной связи не равно целевому выходному давлению, изменение выходного давления, чтобы согласовать давление обратной связи с целевым выходным давлением.
3. Способ по любому из пп. 1 или 2, дополнительно включающий:
контроль изменения в текущем положении при одновременном корректировании выходного давления;
корректирование скорости изменения управляющего сигнала в ответ на изменение в текущем положении, когда управляющий сигнал находится в области отсечки, определяемой, используя данные конфигурации, и
изменение текущего положения на основании скорости изменения управляющего сигнала, когда управляющий сигнал находится в области отсечки.
4. Способ по любому из пп. 1 или 2, в котором контроль изменения в текущем положении дополнительно включает в себя расчет среднего сигнала на основании первого давления обратной связи и второго давления обратной связи, при этом первое давление обратной связи получают, когда выходное давление увеличивается, а второе давление обратной связи получают, когда выходное давление уменьшается.
5. Способ по любому из пп. 1 или 2, дополнительно включающий оценку уровня трения устройства управления процессом на основании первого давления обратной связи и второго давления обратной связи.
6. Способ по любому из пп. 1 или 2, в котором увеличение выходного давления дополнительно включает в себя:
пошаговое увеличение выходного давления;
в ответ на пошаговое увеличение выходного давления определение того, изменяется ли текущее положение, и
когда текущее положение изменяется, определение направления перемещения.
7. Способ по любому из пп. 1 или 2, в котором уменьшение выходного давления дополнительно включает в себя:
пошаговое уменьшение выходного давления;
в ответ на пошаговое уменьшение выходного давления, определение того, изменяется ли текущее положение, и
когда текущее положение изменяется, определение направления перемещения.
8. Способ по любому из пп. 1 или 2, дополнительно включающий создание предупредительного сигнала в ответ на отсутствие изменения в текущем положении.
9. Способ по любому из пп. 1 или 2, дополнительно включающий:
расчет множества разностей между текущим положением и управляющим сигналом до тех пор, пока текущее положение не совпадет с управляющим сигналом, и суммирование множества разностей для формирования значения.
10. Способ по любому из пп. 1 или 2, в котором указанное значение показывает корректировку для корреляции текущего положения для управляющего сигнала.
11. Способ по любому из пп. 1 или 2, в которым данные конфигурации собирают с помощью устройства радиочастотной идентификации.
12. Способ по любому из пп. 1 или 2, в котором расчет смещения выхода дополнительно включает в себя добавление значения ко второму смещению выхода, рассчитанному до смещения выхода.
13. Устройство, содержащее:
запоминающее устройство;
обрабатывающее устройство, соединенное с запоминающим устройством, включающим команды, вынуждающие устройство выполнять следующие действия:
определение того, является ли первое положение устройства управления процессом положением неполного хода устройства управления процессом;
в ответ на то, что первое положение является положением неполного хода, расчет целевого выходного давления на основании данных конфигурации;
определение того, равно ли целевое выходное давление давлению обратной связи, соответствующему выходному сигналу выходного давления от устройства управления процессом;
расчет разности между целевым выходным давлением и давлением обратной связи и
изменение выходного давления по этой разности.
14. Устройство по п. 13, в котором команды дополнительно вынуждают устройство выполнять следующие действия:
контроль изменения в текущем положении устройства управления процессом, в то же время корректируя выходное давление;
в ответ на изменение в текущем положении, когда управляющий сигнал находится в области отсечки, определяемой, используя данные конфигурации, уменьшение скорости изменения управляющего сигнала и
пошаговое изменение текущего положения на основании скорости изменения управляющего сигнала, когда управляющий сигнал находится в области отсечки.
15. Устройство по любому из пп. 13 или 14, в котором команды дополнительно вынуждают устройство выполнять следующие действия:
когда первое положение не является положением неполного хода, расчет второго конечного положения устройства управления процессом на основании первого конечного положения и данных конфигурации;
расчет зоны неполного хода устройства управления процессом на основании первого конечного положения и второго конечного положения;
определение того, когда текущее положение находится в зоне неполного хода; и
когда текущее положение находится в зоне неполного хода, расчет смещения выхода на основании значения, показывающего сравнение текущего положения и положения, соответствующего управляющему сигналу.
16. Устройство по любому из пп. 13 или 14, в котором команды дополнительно вынуждают устройство выполнять следующие действия:
расчет разности между текущим положением и положением, соответствующим управляющему сигналу, и
добавление разности к расчетному значению для формирования значения, показывающего корректировку для корреляции текущего положения для управляющего сигнала.
17. Материальный машиночитаемый носитель для хранения данных, содержащий команды, вынуждающие компьютер выполнять следующие действия:
определение того, является ли первое положение устройства управления процессом первым конечным положением;
в качестве реакции на то, что первое положение является первым конечным положением, расчет второго конечного положения устройства управления процессом на основании первого конечного положения и данных конфигурации;
расчет зоны неполного хода устройства управления процессом на основании первого конечного положения и второго конечного положения;
определение того, когда текущее положение устройства управления процессом находится в пределах зоны неполного хода, и
когда текущее положение находится в пределах зоны неполного хода, расчет смещения выхода на основании значения, показывающего сравнение текущего положения с положением, соответствующим управляющему сигналу.
18. Материальный машиночитаемый носитель для хранения данных по п. 17, дополнительно вынуждающий компьютер выполнять следующие действия:
когда первое положение не является первым конечным положением, расчет целевого выходного давления на основании данных конфигурации;
определение того, равно ли давление обратной связи целевому выходному давлению, причем давление обратной связи соответствует выходному сигналу выходного давления от устройства управления процессом, и
когда давление обратной связи не равно целевому выходному давлению, изменение выходного давления, чтобы согласовать давление обратной связи с целевым выходным давлением.
19. Материальный машиночитаемый носитель для хранения данных по любому из пп. 17 или 18, дополнительно вынуждающий компьютер выполнять следующие действия:
контроль изменения в текущем положении при одновременном корректировании выходного давления;
в ответ на изменение в текущем положении, когда управляющий сигнал находится в области отсечки, определяемой, используя данные конфигурации, корректирование скорости изменения управляющего сигнала и
пошаговое изменение текущего положения на основании скорости изменения управляющего сигнала, когда управляющий сигнал находится в области отсечки.
20. Материальный машиночитаемый носитель для хранения данных по любому из пп. 17 или 18, дополнительно вынуждающий компьютер выполнять следующие действия:
расчет множества разностей между текущим положением и положением, соответствующим управляющему сигналу, до тех пор, пока текущее положение не будет равным положению, соответствующему управляющему сигналу, и
суммирование множества разностей для формирования значения.
21. Материальный машиночитаемый носитель для хранения данных по любому из пп. 17 или 18, в котором значение показывает корректировку для корреляции текущего положения до положения управляющего сигнала.
22. Материальный машиночитаемый носитель для хранения данных по любому из пп. 17 или 18, дополнительно вынуждающий компьютер выполнять следующие действия:
добавление значения ко второму смещению выхода, рассчитанному до смещения выхода.
| WO 9905576 A2, 04.02.1999 | |||
| СПОСОБ ЛЕЧЕНИЯ ПРОГРЕССИРУЮЩЕЙ (АКТИВНОЙ) ФОРМЫ СУБМАКУЛЯРНОЙ НЕОВАСКУЛЯРНОЙ МЕМБРАНЫ (СНМ) | 2008 |
|
RU2372087C1 |
| US 4523286 A, 11.06.1985 | |||
| Запорное устройство и способ управления запорным устройством | 1989 |
|
SU1666833A1 |

