Изобретение относится к устройствам пожаротушения, а именно к роботизированным установкам пожаротушения (РУП).
Известны устройства пожаротушения, например "Роботизированный пожарный комплекс" по А.с. 2319530. Недостатком данного устройства является ограничение в применении из-за стационарной установки пожарных роботов, рабочая зона которых, например, в стеллажных складах или тоннелях требует установки пожарных роботов в узких зонах, что приводит к значительному увеличению их количества и соответственно снижению эффективности применения.
Наиболее близким по технической сути является «Мобильный роботизированный пожарный комплекс» по А.с. №93284, содержащий два и более пожарных робота на мобильных устройствах, включающих в себя лафетный ствол, с установленными на стволе приводами вертикального и горизонтального наведения, насадок с приводом изменения угла распыливания, устройство обнаружения загорания, соединенные с блоком коммутации, транспортный привод, привод стыковки с гидроклапаном и разъемом электропитания, дальномер и аккумулятор, соединенные через блок управления с блоком коммутации, который на выходе соединен по радиоканалу через блок радиоуправления с пультом дистанционного управления и устройством управления, соединенным через приемно-контрольное устройство с пожарными извещателями.
Недостатком данного устройства является усложненная транспортная конструкция, строгая последовательность перемещения по специальному транспортному пути.
В основу изобретения поставлена задача упрощения конструкции РУП, отказ от применения специального транспортного пути, повышение оперативности пожарных роботов.
Эта цель достигается тем, что устройство содержит два и более пожарных робота на мобильных устройствах, включающих в себя лафетный ствол, с установленными на стволе приводами вертикального и горизонтального наведения, насадок с приводом изменения угла распыливания, устройство обнаружения загорания, соединенные с блоком коммутации, транспортный привод, привод стыковки с гидроклапаном и разъемом электропитания, дальномер и аккумулятор, соединенные через блок управления с блоком коммутации, который на выходе соединен по радиоканалу через блок радиоуправления с пультом дистанционного управления и устройством управления, соединенным через приемно-контрольное устройство с пожарными извещателями. Пожарный робот установлен на мобильном устройстве - гироскутере и включает в себя контроллер управления положением центра тяжести, навигатор маршрутных карт с парковочным устройством к местам водозабора для стыковки с гидроклапаном и разъемом электропитания.
Предложенное техническое решение позволяет не применять монорельсовые пути, что значительно упрощает конструкцию РУП, а также оперативно перемещать пожарные роботы сразу к месту возникновения загорания.
Автору не известны устройства с отличительными признаками в соответствии с заявляемыми техническими решениями.
Изобретение отвечает требованиям новизны и положительного эффекта, а также критерию "существенные отличия".
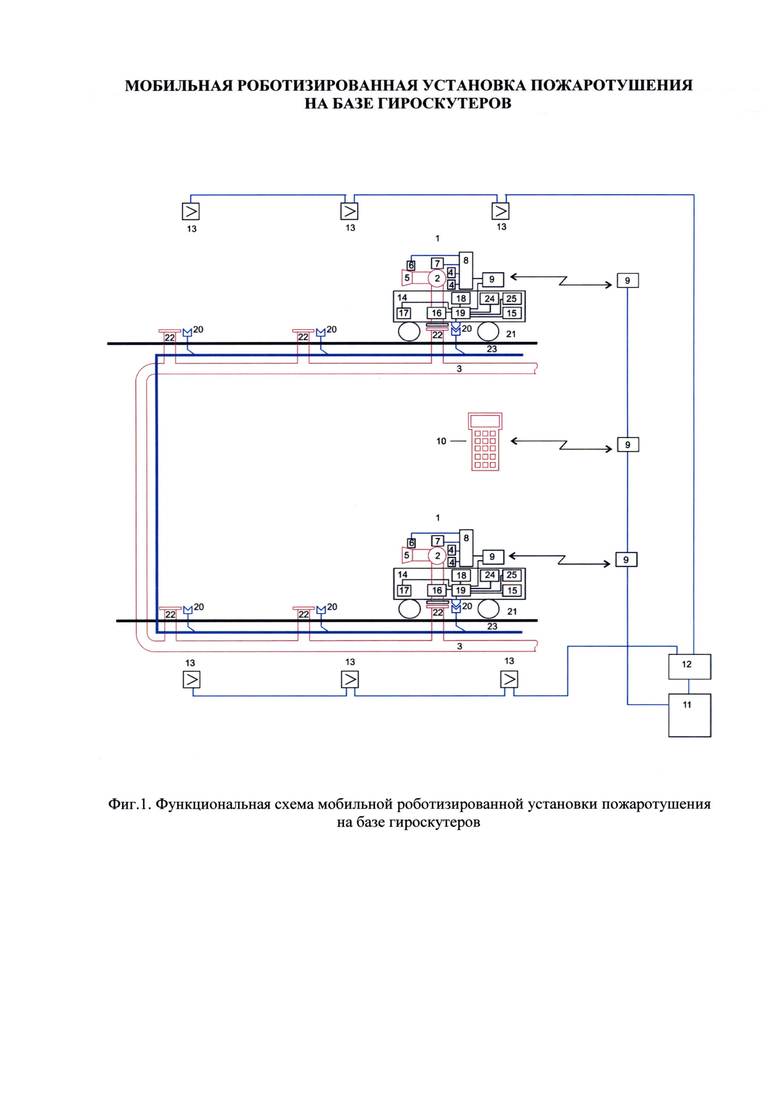
На фиг. 1 представлена функциональная схема мобильной роботизированной установки пожаротушения на базе гироскутеров, на фиг. 2 - общий вид мобильного пожарного робота на гироскутере.
Устройство содержит два и более пожарных робота 1, объединенных в мобильный роботизированный пожарный комплекс, включающих в себя лафетный ствол 2, соединенный с пожарным трубопроводом 3, с установленными на стволе 2 приводами вертикального и горизонтального наведения 4, насадком 5 с приводом изменения угла распыливания 6, устройством обнаружения загорания 7, соединенными с блоком коммутации 8 на входе, а на его выходе по радиоканалу через блок радиоуправления 9 с пультом дистанционного управления 10 и устройством управления 11, которое через приемно-контрольное устройство 12 соединено с пожарными извещателями 13. Пожарный робот 1 установлен на мобильном устройстве - гироскутере 14, оснащенном транспортным приводом 15, приводом стыковки с гидроклапаном и разъемом электропитания 16, дальномером 17 и аккумулятором 18, соединенными на входе с блоком управления гироскутером 19, а на его выходе с разъемом электропитания 20 и по радиоканалу с пультом дистанционного управления 10 и устройством управления 11. Пожарный робот 1 на гироскутере 14 передвигается по плоской поверхности 21 к местам водозабора с установленными на нем гидроклапанами 22 и разъемами электропитания 20, соединенными с сетью электроснабжения 23. Балансировка пожарного робота в стационарном положении или передвижении осуществляется контроллером управления положением центра тяжести 24, а управление перемещением - навигатором маршрутных карт с парковочным устройством 25 для стыковки с гидроклапаном 22 и разъемом электропитания 20.
Устройство работает следующим образом.
При срабатывании пожарных извещателей 13 и поступлении сигнала о пожаре от приемно-контрольного устройства 12 устройство управления 11 формирует команду по радиоканалу через блок радиоуправления 9 блоку коммутации 8 пожарного робота 1 и через блок управления 19 гироскутерам 14 на перемещение по плоской поверхности 21 по адресу зоны загорания. Управляющий сигнал поступает на навигатор 24, который выбирает маршрутную карту и формирует направление перемещения на контроллер управления положением центра тяжести 24. Контроллер 24 через блок коммутации 8 подает управляющий сигнал приводам 4 ствола 2 на его наведение по указанному маршруту. При перемещении ствола смещается положение центра тяжести, включается транспортный привод 15, получающий электропитание от аккумулятора 18. При подходе к зоне загорания по информации от дальномера 17 формируется команда на пониженную скорость и затем останов у гидроклапана 22, при этом включается парковочное устройство 25, которое по программе производит стыковку пожарного робота 1 с гидроклапаном 22 и разъемом электропитания 20. С использованием устройства обнаружения загорания 7 от двух пожарных роботов 1 устройством управления 11 определяются координаты очага загорания и формируются управляющие команды по наведению лафетного ствола 2 приводами вертикального и горизонтального наведения 4. От пожарного трубопровода 3 подается вода, а через разъем 20 электропитание от сети электроснабжения 23. Насадок 5 с использованием приводов изменения угла распыливания 6 формирует струю воды. Пожаротушение осуществляется в автоматическом режиме устройством управления 11 по программе строчным сканированием струей по площади очага загорания. Перемещение гироскутеров 14 и пожаротушение может также осуществляться в дистанционном режиме от пульта дистанционного управления 10.
Предложенная мобильная роботизированная установка пожаротушения является эффективным автоматическим и дистанционно управляемым средством борьбы с пожарами, позволяющим адресно перемещать пожарные роботы на значительные расстояния к очагу загорания и направлять мощный поток огнетушащего вещества непосредственно на очаг загорания, обнаруженный в ранней стадии, а также высвободить человека из опасных для жизни аварийных зон.
В отличие от известных, предложенная мобильная роботизированная установка пожаротушения позволяет расширить рабочие зоны пожарных роботов при уменьшении их количества в роботизированной установке пожаротушения, а также адресно перемещать пожарные роботы по любой плоской поверхности в места возникновения загорания на значительные расстояния.
Эти отличительные особенности устройства позволяют его использовать для реализации безлюдных технологий в тяжелых и опасных для жизни людей условиях.
| название | год | авторы | номер документа |
|---|---|---|---|
| САМОДВИЖУЩИЙСЯ КОМПЛЕКС ПОЖАРОТУШЕНИЯ НА БАЗЕ САМОХОДНОГО РОБОТА | 2020 |
|
RU2755461C1 |
| РОБОТИЗИРОВАННАЯ УСТАНОВКА ПОЖАРОТУШЕНИЯ МОБИЛЬНАЯ НА БАЗЕ ПОЖАРНЫХ РОБОТОВ С ТЕЛЕСКОПИЧЕСКИМ МАНИПУЛЯТОРОМ И ВОДОЗАПОРНЫХ КЛАПАНОВ С ПОДВИЖНЫМ СЕДЛОМ | 2020 |
|
RU2740968C1 |
| Роботизированная установка пожаротушения контейнерная для автоматизированных складов | 2020 |
|
RU2739816C1 |
| Роботизированная установка пожаротушения мобильная на базе роботов в трубопроводах | 2022 |
|
RU2785414C1 |
| САМОДВИЖУЩИЙСЯ УНИВЕРСАЛЬНЫЙ КОМПЛЕКС ОБСЛУЖИВАНИЯ ОБЪЕКТА | 2019 |
|
RU2732286C1 |
| РОБОТИЗИРОВАННЫЙ ПОЖАРНЫЙ КОМПЛЕКС | 2005 |
|
RU2319530C2 |
| РОБОТИЗИРОВАННАЯ УСТАНОВКА ПОЖАРОТУШЕНИЯ С СИСТЕМОЙ ПРЕДУПРЕДИТЕЛЬНОГО МОНИТОРИНГА И СЕЛЕКТИВНОГО ТУШЕНИЯ | 2020 |
|
RU2736432C1 |
| Многофункциональный робототехнический комплекс противопожарной защиты производственных объектов на базе роботизированной установки пожаротушения и мобильного роботизированного комплекса | 2023 |
|
RU2814057C1 |
| Роботизированная установка пожаротушения | 2021 |
|
RU2760650C1 |
| РОБОТИЗИРОВАННЫЙ ПОЖАРНЫЙ КОМПЛЕКС НА БАЗЕ ПОЖАРНЫХ МИНИ-РОБОТОВ-ОРОСИТЕЛЕЙ С СИСТЕМОЙ УДАЛЕННОГО ДОСТУПА | 2018 |
|
RU2677622C1 |

Мобильная роботизированная установка пожаротушения на базе гироскутеров относится к устройствам пожаротушения. Целью изобретения является создание высоконадежного, эффективного быстродействующего устройства пожаротушения с автоматическим определением координат загорания, автоматическим наведением струи огнетушащего вещества на очаг загорания и значительным расширением рабочей зоны обслуживания при уменьшении количества пожарных роботов, входящих в состав установки. Для этого устройство содержит два и более пожарных робота на мобильных устройствах, включающих в себя лафетный ствол, с установленными на стволе приводами вертикального и горизонтального наведения, насадок с приводом изменения угла распыливания, устройство обнаружения загорания, соединенные с блоком коммутации, транспортный привод, привод стыковки с гидроклапаном и разъемом электропитания, дальномер и аккумулятор, соединенные через блок управления с блоком коммутации, который на выходе соединен по радиоканалу через блок радиоуправления с пультом дистанционного управления и устройством управления, соединенным через приемно-контрольное устройство с пожарными извещателями. Пожарный робот установлен на мобильном устройстве - гироскутере и включает в себя контроллер управления положением центра тяжести, навигатор маршрутных карт с парковочным устройством к местам водозабора для стыковки с гидроклапаном и разъемом электропитания. 2 ил.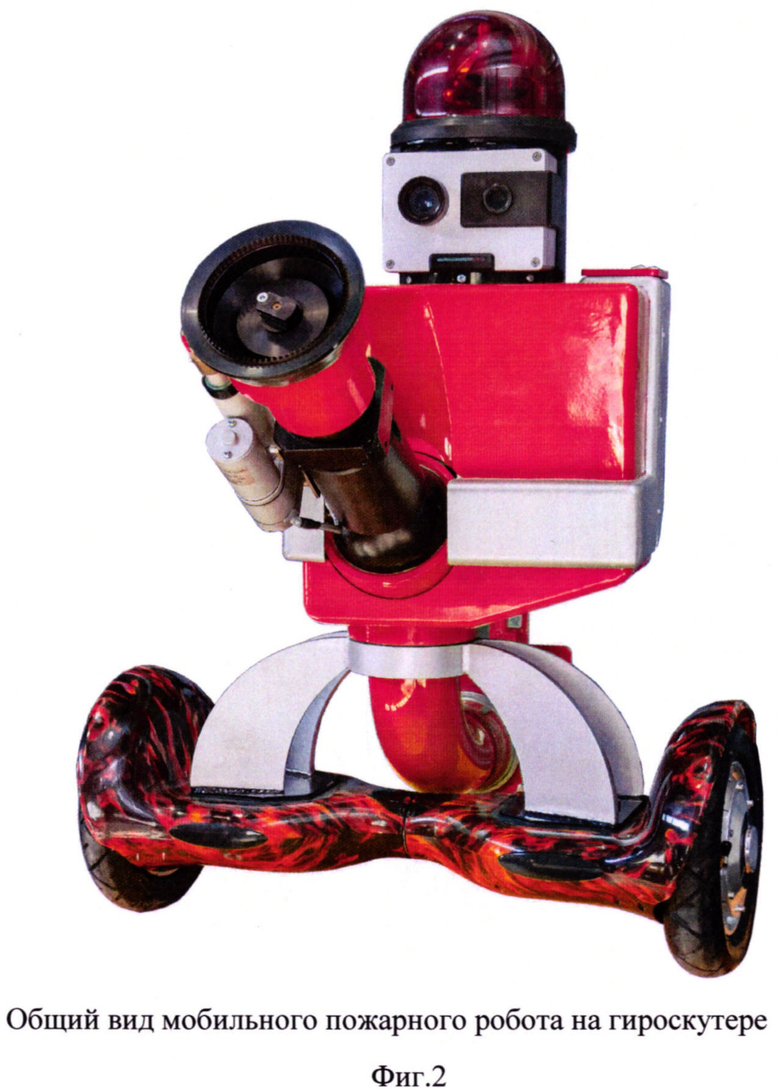
Мобильная роботизированная установка пожаротушения на базе гироскутеров, содержащая два и более пожарных робота на мобильных устройствах, включающих в себя лафетный ствол, с установленными на стволе приводами вертикального и горизонтального наведения, насадок с приводом изменения угла распыливания, устройство обнаружения загорания, соединенные с блоком коммутации, транспортный привод, привод стыковки с гидроклапаном и разъемом электропитания, дальномер и аккумулятор, соединенные через блок управления с блоком коммутации, который на выходе соединен по радиоканалу через блок радиоуправления с пультом дистанционного управления и устройством управления, соединенным через приемно-контрольное устройство с пожарными извещателями, отличающаяся тем, что пожарный робот установлен на мобильном устройстве - гироскутере и дополнительно включает в себя контроллер управления положением центра тяжести, навигатор маршрутных карт с парковочным устройством к местам водозабора для стыковки с гидроклапаном и разъемом электропитания.
| RU 93284 U1, 27.04.2010 | |||
| Двигатель внутреннего горения с косой качающейся шайбой | 1940 |
|
SU63692A1 |
| US 2006185858 A1, 2408.2006 | |||
| CN 104443193 A, 25.03.2015. | |||

