Изобретение относится к устройствам пожаротушения, а именно к роботизированным установкам пожаротушения (РУП).
Известны устройства пожаротушения, например “Роботизированный пожарный комплекс” по А.с. 2319530. Недостатком данного устройства является ограничение в применении из-за стационарной установки пожарных роботов, рабочая зона которых лимитируется радиусом действия струи и параметрами помещений, например, для протяженных сооружений к которым относятся стеллажные склады или тоннели, применение стационарных пожарных роботов приводит к значительному увеличению их количества из-за только частичного использования их рабочей зоны.
Наиболее близким по технической сути является изобретение «Роботизированная установка пожаротушения мобильная на базе пожарных роботов с телескопическим манипулятором и водозапорных клапанов с подвижным седлом» патент №2740968, содержащее пожарный трубопровод, водозапорные клапаны с подвижным седлом, путевые датчики, два и более пожарных робота, установленных на подвижном устройстве с аккумулятором и разъемом электропитания для подключения к блоку питания, включающих в себя пожарный ствол с приводами вертикального и горизонтального наведения, устройство обнаружения возгораний, насадок с приводом изменения угла распыливания, соединенные с блоком коммутации, который по радиоканалу через блок радиоуправления соединен с пультом дистанционного управления и устройством управления, соединенным через приемно-контрольное устройство с адресными пожарными извещателями.
Недостатком данного устройства является то, что для перемещения пожарных роботов требуется создание специального монорельсового пути, оснащение мобильного устройства отдельным транспортным приводом, а пожарный трубопровод в каждом месте водозабора должен быть оборудован управляемыми водозапорными клапанами.
В основу изобретения поставлены задачи значительного снижения массогабаритных показателей устройства путем исключения специального монорельсового пути с колесными мобильными устройствами с транспортными приводами перемещения и уменьшения количества водозапорных клапанов путем их размещения только на пожарных роботах.
Эта цель достигается тем, что подвижное устройство выполнено в виде обтекаемой капсулы, автономно перемещающейся в пожарном трубопроводе под действием скоростного потока воды, с установленным в ней пожарным роботом, на вводе которого
установлен водозапорный клапан с подвижным седлом, управляемым электромагнитной защелкой, при этом на пожарном трубопроводе установлены транспортные отсеки, оснащенные направляющими для ориентирования капсулы, имеющие на входе и выходе кольцевые уплотнения для герметичной стыковки с капсулой, подвижный цилиндрический кожух с кольцевыми уплотнениями, перемещаемый телескопическим выдвижным устройством, и управляемый от устройства управления упор, фиксирующий положение капсулы, воздействующий на выдвижное устройство для открытия отсека и на подпружиненный шаровой поворотный канал для вывода ствола из отсека.
Предложенное техническое решение позволяет исключить применение специального монорельсового пути и мобильных устройств с приводами перемещения, что значительно снижает массогабаритные показатели устройства, а также позволяет снизить количество управляемых водозапорных клапанов.
Автору не известны устройства с отличительными признаками в соответствии с заявляемыми техническими решениями.
Изобретение отвечает требованиям новизны и положительного эффекта, а также критерию “существенные отличия”.
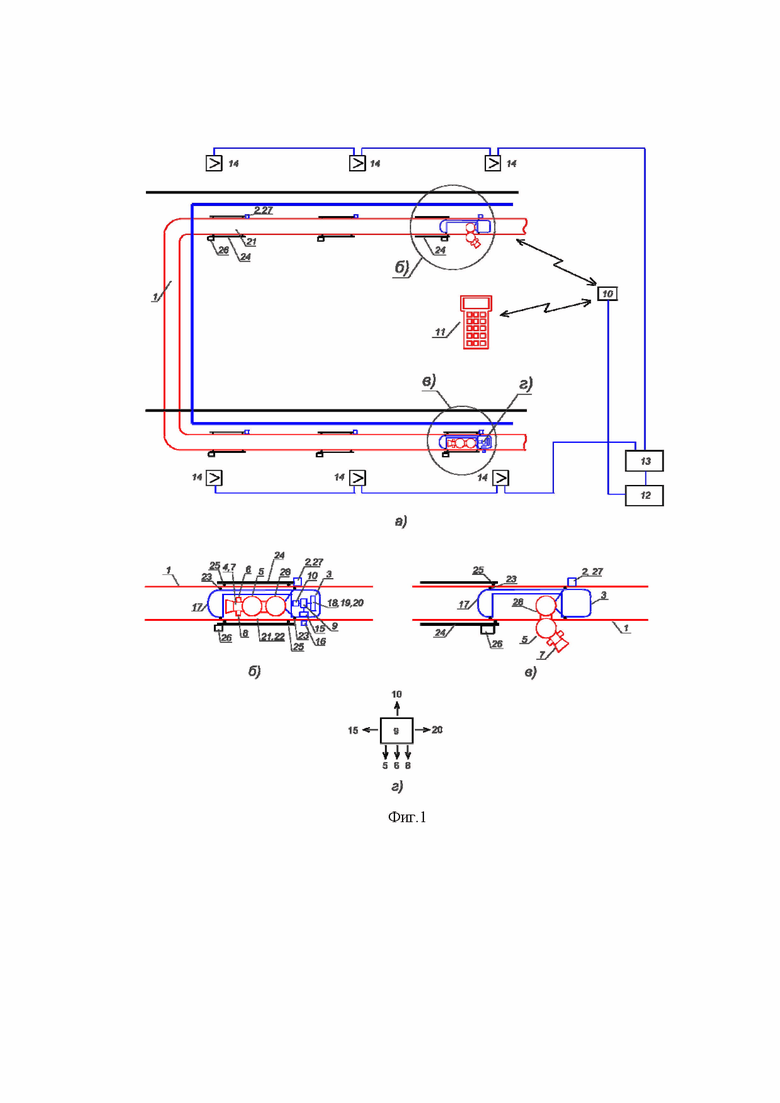
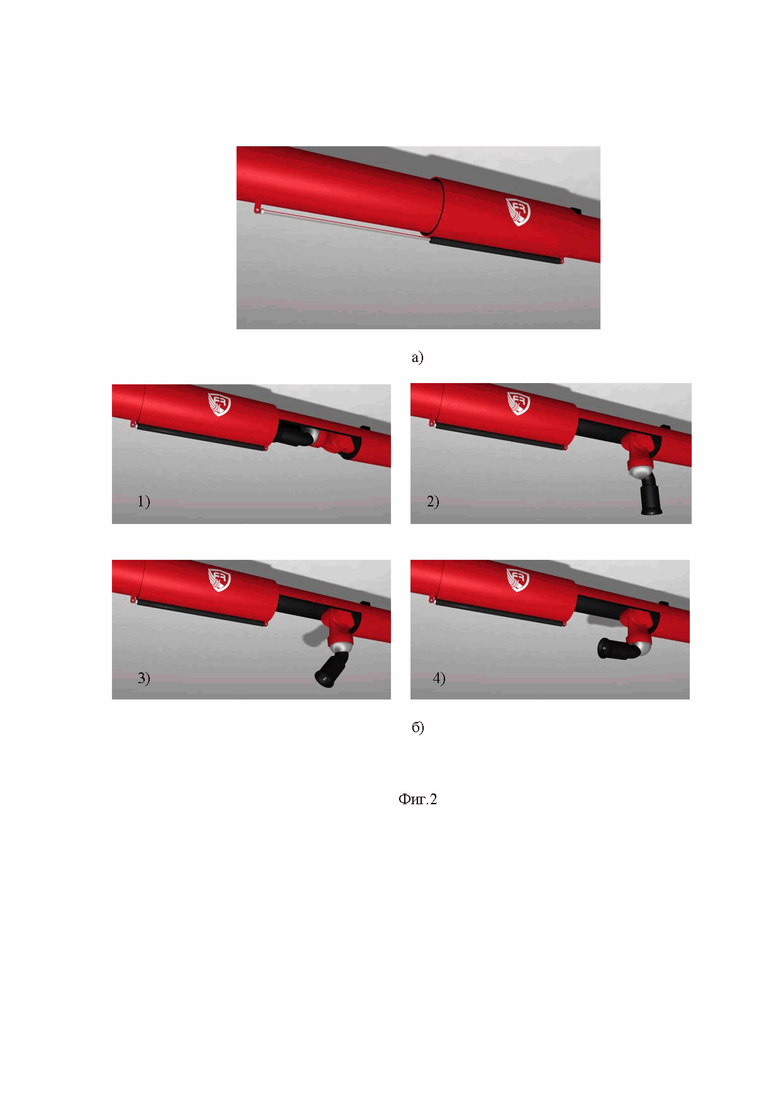
На фиг. 1 представлены функциональные схемы: а) роботизированной установки пожаротушения мобильной, б) автономного пожарного робота в дежурном режиме, в) автономного пожарного робота в рабочем режиме, г) схема подключений блока коммутации; на фиг. 2 общий вид автономного пожарного робота: а) в дежурном режиме, б) в рабочем режиме: 1) секция открыта; 2) вывод пожарного робота из отсека; 3) выход пожарного робота в рабочую позицию; 5) вывод ствола в горизонтальную позицию.
Устройство содержит пожарный трубопровод 1 с путевыми датчиками 2, два и более пожарных робота 3, включающих в себя пожарный ствол 4 с приводами вертикального и горизонтального наведения 5, устройство обнаружения возгорания 6, насадок с отводом 7 с приводом изменения угла распыливания 8, соединенные с блоком коммутации 9, который на выходе соединен по радиоканалу через блок радиоуправления 10 с пультом дистанционного управления 11 и устройством управления 12, соединенным через приемно-контрольное устройство 13 с адресными пожарными извещателями 14.
Насадок с отводом 7 позволяет в вертикальной плоскости направлять струю от 0 до - 90 градусов к горизонту и при вращении на 360 градусов защищать все пространство от потолочного перекрытия в радиусе действия струи, см. фиг. 2б поз. 2, 3, 4. Аккумулятор 15 соединен с блоком коммутации 9 и через разъем электропитания 16 с блоком питания (не показано). Пожарный робот 3 установлен на подвижном устройстве в виде обтекаемой капсулы 17, автономно перемещающейся в пожарном трубопроводе 1 под действием скоростного потока воды. На вводе пожарного робота 3 установлен водозапорный клапан 18 с подвижным седлом 19, см., например, патент №2740968, управляемым электромагнитной защелкой 20. На пожарном трубопроводе 1 установлены транспортные отсеки 21, оснащенные направляющими 22 для ориентирования пожарного робота 3. Отсеки 21 имеют на входе и выходе кольцевые уплотнения 23 для герметичной стыковки с капсулой 17 и подвижный цилиндрический кожух 24 с кольцевыми уплотнениями 25, перемещаемый телескопическим выдвижным устройством 26. Отсек 21 оснащен также управляемым от устройства управления 12 упором 27, фиксирующим положение капсулы 17, воздействующий на выдвижное устройство 26, которое перемещает подвижный кожух 24, открывающий отсек 21, и на подпружиненный шаровой поворотный канал 28 для вывода ствола 4 из отсека 21.
Устройство работает следующим образом. В дежурном режиме, см. фиг. 1б и фиг. 2а, пожарный робот 3 находится в исходной позиции, при которой контакты разъема 16 соединены и аккумулятор 15 получает электропитание от блока питания. При срабатывании пожарных извещателей 14 и поступлении сигнала о пожаре от приемно-контрольного устройства 13 устройство управления 12 формирует команду на включение насосной станции (не показано) и выдвижение упора 27 в одной из секций 21, соответствующей зоне пожара, определенной адресной пожарной сигнализацией. Под давлением воды со скоростью, определяемой скоростью потока, капсула 17 с пожарным роботом 3 перемещается в трубопроводе 1 по адресу зоны загорания. При подходе к зоне загорания по информации от путевого датчика 2, фиксирующего прохождение через секцию 21, предшествующую зоне загорания, формируется команда на пониженную скорость. При этом открывается электрозадвижка на байпасном соединении пожарного трубопровода 1 (не показано), отводя основной поток воды. В точке позиционирования капсула 17 фиксируется упором 27 в отсеке 21 между кольцевыми уплотнениями 23 на входе и выходе отсека 21 для герметичной стыковки с капсулой 17. При этом капсула 17 воздействует на рычаг упора 27, который снимает с блокировки выдвижное устройство 26, перемещающее подвижный кожух 24, и отсек 21 открывается, см. фиг. 2б поз. 1 и 2, при этом снимая с блокировки подпружиненный поворотный канал 28, который выводит ствол 4 из отсека 21, разворачивая пожарный робот 3 в рабочую позицию, см. фиг. 2б поз. 2, 3 и 4, и открывая оптическую часть устройства обнаружения загорания 6, установленную в герметичном корпусе (не показано).
С использованием устройства обнаружения загорания 6 пожарного робота 3 устройством управления 12 определяются координаты очага загорания и формируются управляющие команды по наведению лафетного ствола 4 приводами вертикального и горизонтального наведения 5. По сигналу от устройства управления 12 закрывается электрозадвижка на байпасном соединении пожарного трубопровода 1, включается электромагнитная защелка 20, которая с использованием подвижного седла 19 открывает водозапорный клапан 18, и поток воды от пожарного трубопровода 1 под расчетным давлением подается в ствол 4. Насадок 7 с использованием привода изменения угла распыливания 8 формирует струю воды. Пожаротушение осуществляется в автоматическом режиме устройством управления 12 по программе строчным сканированием струей по площади очага загорания. Перемещение пожарного робота 3 и пожаротушение могут также осуществляться с пульта дистанционного управления 11 в дистанционном режиме: заданием номера секции, перемещением капсулы 17 до указанной секции с автоматическим переходом на пониженную скорость, позиционированием и переводом пожарного робота в рабочую позицию. В дальнейшем производится управление наведением ствола 4 на очаг возгорания и открытием водозапорного клапана 18, при этом закрывается электрозадвижка на байпасном соединении пожарного трубопровода 1.
Предложенная мобильная роботизированная установка пожаротушения на базе роботов в пожарном трубопроводе является эффективным автоматическим и дистанционно управляемым средством борьбы с пожарами, позволяющим адресно перемещать пожарные роботы на значительные расстояния к очагу загорания и направлять мощный поток огнетушащего вещества непосредственно на очаг загорания, обнаруженный в ранней стадии, а также высвободить человека из опасных для жизни аварийных зон.
В отличие от известных устройств, предложенная мобильная роботизированная установка пожаротушения позволяет исключить применение специального монорельсового пути и мобильных устройств с приводами перемещения, что значительно снижает массогабаритные показатели устройства
Эти отличительные особенности значительно упрощают и удешевляют устройство, делают его более удобным в эксплуатации.
| название | год | авторы | номер документа |
|---|---|---|---|
| РОБОТИЗИРОВАННАЯ УСТАНОВКА ПОЖАРОТУШЕНИЯ МОБИЛЬНАЯ НА БАЗЕ ПОЖАРНЫХ РОБОТОВ С ТЕЛЕСКОПИЧЕСКИМ МАНИПУЛЯТОРОМ И ВОДОЗАПОРНЫХ КЛАПАНОВ С ПОДВИЖНЫМ СЕДЛОМ | 2020 |
|
RU2740968C1 |
| МОБИЛЬНАЯ РОБОТИЗИРОВАННАЯ УСТАНОВКА ПОЖАРОТУШЕНИЯ НА БАЗЕ ГИРОСКУТЕРОВ | 2016 |
|
RU2642770C2 |
| Многофункциональный робототехнический комплекс предупредительного мониторинга, обнаружения возгораний и управления пожаротушением производственных объектов | 2021 |
|
RU2775482C1 |
| САМОДВИЖУЩИЙСЯ КОМПЛЕКС ПОЖАРОТУШЕНИЯ НА БАЗЕ САМОХОДНОГО РОБОТА | 2020 |
|
RU2755461C1 |
| Роботизированная установка пожаротушения контейнерная для автоматизированных складов | 2020 |
|
RU2739816C1 |
| РОБОТИЗИРОВАННЫЙ ПОЖАРНЫЙ КОМПЛЕКС | 2005 |
|
RU2319530C2 |
| Многофункциональный робототехнический комплекс противопожарной защиты производственных объектов на базе роботизированной установки пожаротушения и мобильного роботизированного комплекса | 2023 |
|
RU2814057C1 |
| Роботизированная установка пожаротушения | 2021 |
|
RU2760650C1 |
| РОБОТИЗИРОВАННЫЙ ПОЖАРНЫЙ КОМПЛЕКС НА БАЗЕ ПОЖАРНЫХ МИНИ-РОБОТОВ-ОРОСИТЕЛЕЙ С СИСТЕМОЙ УДАЛЕННОГО ДОСТУПА | 2018 |
|
RU2677622C1 |
| РОБОТИЗИРОВАННАЯ УСТАНОВКА ПОЖАРОТУШЕНИЯ С СИСТЕМОЙ ПРЕДУПРЕДИТЕЛЬНОГО МОНИТОРИНГА И СЕЛЕКТИВНОГО ТУШЕНИЯ | 2020 |
|
RU2736432C1 |
Изобретение относится к технике пожаротушения, в частности к роботизированным установкам пожаротушения. Техническим результатом является снижение массогабаритных показателей устройства путем исключения специального монорельсового пути с колесными мобильными устройствами с транспортными приводами перемещения и уменьшение количества водозапорных клапанов путем их размещения только на пожарных роботах. Заявлена роботизированная установка пожаротушения мобильная на базе роботов в трубопроводах, содержащая пожарный трубопровод, водозапорные клапаны с подвижным седлом, путевые датчики, два и более пожарных робота, установленных на подвижном устройстве с аккумулятором и разъемом электропитания для подключения к блоку питания. При этом пожарные роботы включают в себя пожарный ствол с приводами вертикального и горизонтального наведения, устройство обнаружения возгорания, насадок с приводом изменения угла распыливания, соединенные с блоком коммутации, который по радиоканалу через блок радиоуправления соединен с пультом дистанционного управления и устройством управления, соединенным через приемно-контрольное устройство с адресными пожарными извещателями. Кроме того, пожарный робот установлен на подвижном устройстве в виде обтекаемой капсулы, автономно перемещающейся в пожарном трубопроводе под действием скоростного потока воды, на его вводе установлен водозапорный клапан с подвижным седлом, управляемым электромагнитной защелкой. При этом на пожарном трубопроводе установлены транспортные отсеки, оснащенные направляющими для ориентирования пожарного робота, имеющие на входе и выходе кольцевые уплотнения для герметичной стыковки с капсулой, подвижный цилиндрический кожух с кольцевыми уплотнениями, перемещаемый телескопическим выдвижным устройством, и управляемый от устройства управления упор, фиксирующий положение капсулы, воздействующий на выдвижное устройство для открытия отсека и на подпружиненный шаровой поворотный канал для вывода ствола из отсека. 2 ил.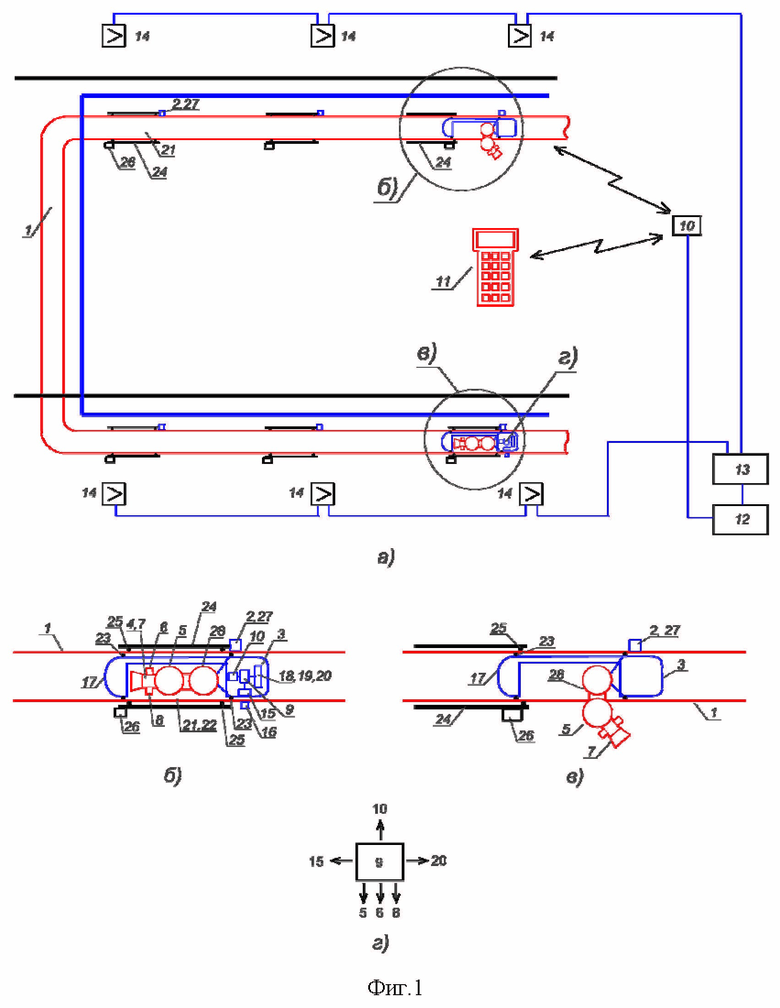
Роботизированная установка пожаротушения мобильная на базе роботов в трубопроводах, содержащая пожарный трубопровод, водозапорные клапаны с подвижным седлом, путевые датчики, два и более пожарных робота, установленных на подвижном устройстве с аккумулятором и разъемом электропитания для подключения к блоку питания, включающих в себя пожарный ствол с приводами вертикального и горизонтального наведения, устройство обнаружения возгорания, насадок с приводом изменения угла распыливания, соединенные с блоком коммутации, который по радиоканалу через блок радиоуправления соединен с пультом дистанционного управления и устройством управления, соединенным через приемно-контрольное устройство с адресными пожарными извещателями, отличающаяся тем, что в устройстве пожарный робот установлен на подвижном устройстве в виде обтекаемой капсулы, автономно перемещающейся в пожарном трубопроводе под действием скоростного потока воды, на его вводе установлен водозапорный клапан с подвижным седлом, управляемым электромагнитной защелкой, при этом на пожарном трубопроводе установлены транспортные отсеки, оснащенные направляющими для ориентирования пожарного робота, имеющие на входе и выходе кольцевые уплотнения для герметичной стыковки с капсулой, подвижный цилиндрический кожух с кольцевыми уплотнениями, перемещаемый телескопическим выдвижным устройством, и управляемый от устройства управления упор, фиксирующий положение капсулы, воздействующий на выдвижное устройство для открытия отсека и на подпружиненный шаровой поворотный канал для вывода ствола из отсека.
| РОБОТИЗИРОВАННАЯ УСТАНОВКА ПОЖАРОТУШЕНИЯ МОБИЛЬНАЯ НА БАЗЕ ПОЖАРНЫХ РОБОТОВ С ТЕЛЕСКОПИЧЕСКИМ МАНИПУЛЯТОРОМ И ВОДОЗАПОРНЫХ КЛАПАНОВ С ПОДВИЖНЫМ СЕДЛОМ | 2020 |
|
RU2740968C1 |
| Противопожарное устройство | 1985 |
|
SU1340757A1 |
| Двигатель внутреннего горения с косой качающейся шайбой | 1940 |
|
SU63692A1 |
| САМОДВИЖУЩИЙСЯ КОМПЛЕКС ПОЖАРОТУШЕНИЯ НА БАЗЕ САМОХОДНОГО РОБОТА | 2020 |
|
RU2755461C1 |
| JP 08191899 A, 30.07.1996 | |||
| WO 2001097918 A1, 27.12.2001 | |||
| CN 113274681 A, 20.08.2021. | |||

