Изобретение относится к устройствам пожаротушения, а именно к роботизированным установкам пожаротушения (РУП).
Известны устройства пожаротушения, например, “Роботизированный пожарный комплекс” по А.с.2319530. Недостатком данного устройства является ограничение в применении из-за стационарной установки пожарных роботов, рабочая зона которых лимитируется радиусом действия струи и параметрами помещений, для узких сооружений, например стеллажных складов или тоннелей, применение стационарных пожарных роботов приводит к значительному увеличению их количества и, соответственно, снижению эффективности применения.
Наиболее близким по технической сути является «Мобильный роботизированный пожарный комплекс» патент № 93284, содержащий два и более пожарных робота, включающих в себя лафетный ствол с приводами вертикального и горизонтального наведения, насадок с приводом изменения угла распыливания, устройство обнаружения загорания, соединенные с блоком коммутации, который на выходе соединен по радиоканалу через блок радиоуправления с пультом дистанционного управления и устройством управления, соединенным через приемно-контрольное устройство с пожарными извещателями; мобильное устройство, оснащенное транспортным приводом, устройством стыковки, путевым датчиком и аккумулятором, соединенными на входе с блоком управления мобильным устройством, а на его выходе с разъемом электропитания и по радиоканалу с пультом дистанционного управления и устройством управления, водозапорные клапаны, установленные на пожарном трубопроводе в местах водозабора.
Недостатком данного устройства является то, что известные водозапорные клапаны, работающие под давлением рабочей среды, не предназначены для управляемого стыковочного соединения, а для их управляемого отключения, например для электромагнитных клапанов, требуется отдельная сеть электрического питания и управления, что усложняет и удорожает устройство, т.к. на пожарном трубопроводе их может быть значительное количество.
В основу изобретения поставлена задача введения в конструкцию пожарного робота телескопического манипулятора с функцией как стыковки, так и открытия водозапорных клапанов, конструктивно выполненных для этой цели.
Эта цель достигается тем, что устройство стыковки пожарного робота выполнено в виде телескопического манипулятора, включающего в себя подвижную соединительную головку, герметично установленную на трубном вводе ствола, перемещаемую поступательно актуатором для герметичной стыковки с водозапорным клапаном и его открытия, содержащим ответную соединительную головку, корпус с фиксированно установленным в нем по оси потока рабочей среды клапаном сферической формы, подвижно установленное в корпусе седло, подпружиненное установленной на корпусе наружной втулкой, перемещаемое кольцевым выступом соединительной головки манипулятора.
Предложенное техническое решение позволяет применять водозапорные устройства без приводов с дистанционным управлением, что значительно упрощает и удешевляет устройство и систему управления в целом, особенно в случаях, когда водозапорные устройства устанавливаются на пожарном трубопроводе в большом количестве.
Автору не известны устройства с отличительными признаками в соответствии с заявляемыми техническими решениями.
Изобретение отвечает требованиям новизны и положительного эффекта, а также критерию “существенные отличия”.
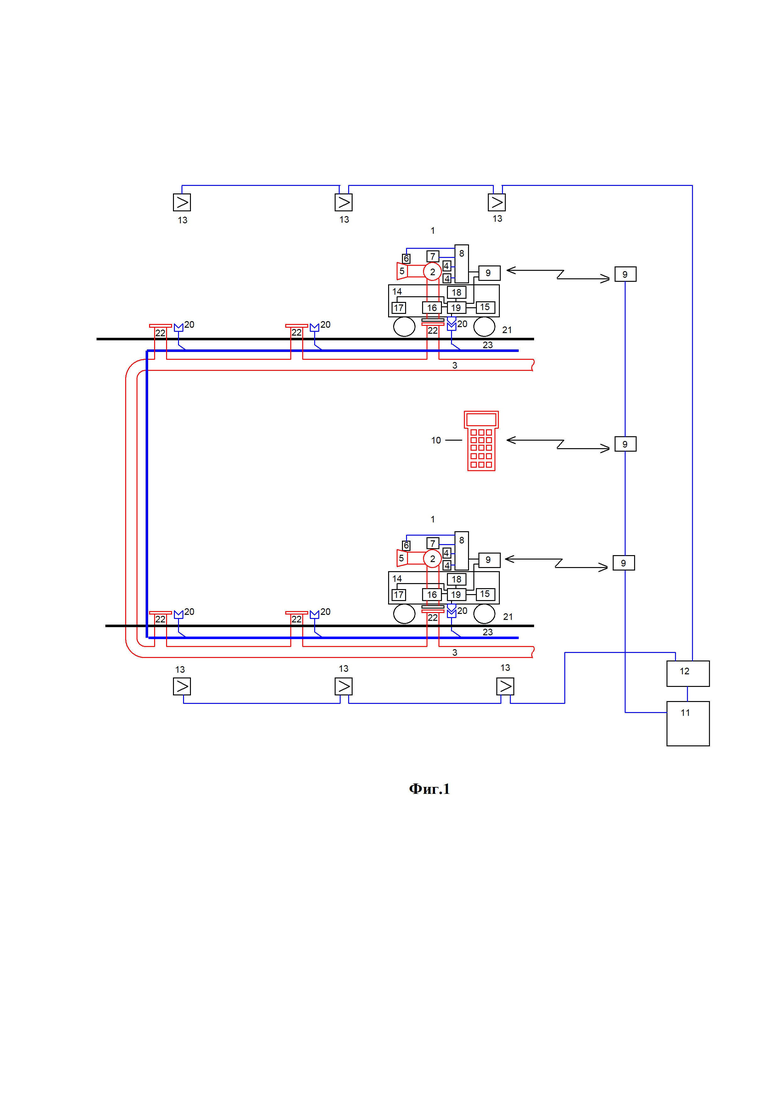
На фиг.1 представлена функциональная схема мобильной роботизированной установки пожаротушения, на фиг. 2 - общий вид пожарного робота с телескопическим манипулятором и водозапорным клапаном с подвижным седлом.
Устройство содержит два и более пожарных робота 1, объединенных в мобильный роботизированный пожарный комплекс, включающих в себя лафетный ствол 2, соединенный с пожарным трубопроводом 3, с установленными на стволе 2 приводами вертикального и горизонтального наведения 4, насадком 5 с приводом изменения угла распыливания 6, устройством обнаружения загорания 7, соединенными с блоком коммутации 8 на входе, а на его выходе по радиоканалу через блок радиоуправления 9 с пультом дистанционного управления 10 и устройством управления 11, которое через приемно-контрольное устройство 12 соединено с пожарными извещателями 13. Мобильное устройство 14, оснащенное транспортным приводом 15, устройством стыковки 16, путевым датчиком 17 и аккумулятором 18, соединенными на входе с блоком управления мобильным устройством 19, а на его выходе с разъемом электропитания 20 и по радиоканалу с пультом дистанционного управления 10 и устройством управления 11, перемещаемое по рельсовому пути 21 вдоль пожарного трубопровода 3, на котором в местах водозабора установлены водозапорные клапаны 22. Устройство стыковки 16 пожарного робота 1 выполнено в виде телескопического манипулятора 23, включающего в себя подвижную соединительную головку 24, герметично установленную на трубном вводе 25 ствола 2, перемещаемую поступательно актуатором 26 для герметичной стыковки с водозапорным клапаном 22, содержащим ответную соединительную головку 27, корпус 28 с фиксированно установленным в нем по оси потока рабочей среды клапаном сферической формы 29, так что между корпусом и клапаном образуется кольцевой щелевой зазор, подвижно установленное в корпусе 28 седло 30, перемещаемое установленной на корпусе 28 подпружиненной наружной втулкой 31, перемещаемой, в свою очередь, кольцевым выступом 32 соединительной головки 24 манипулятора 23. При отсутствии механического воздействия подвижное седло 30 под действием подпружиненной наружной втулки 31 находится в положении «закрыто» - находясь в контакте с клапаном 29, перекрывает рабочий поток.
Устройство работает следующим образом. При срабатывании пожарных извещателей 13 и поступлении сигнала о пожаре от приемно-контрольного устройства 12 устройство управления 11 формирует команду по радиоканалу через блок радиоуправления 9 блоку коммутации 8 пожарного робота 1 и через блок управления 19 мобильным устройствам 14 на перемещение по рельсовому пути 21 по адресу зоны загорания. При подходе к зоне загорания по информации от путевого датчика 17 формируется команда на пониженную скорость, и затем останов у водозапорного клапана 22. С использованием устройства обнаружения загорания 7 от двух пожарных роботов 1 устройством управления 11 определяются координаты очага загорания и формируются управляющие команды по наведению лафетного ствола 2 приводами вертикального и горизонтального наведения 4. Включается устройство стыковки 16 с водозапорным клапаном 22. Соединительная головка 24 телескопического манипулятора 23 перемешается актуатором 26 по трубному вводу 25 ствола 2 и герметично стыкуется с ответной соединительной головкой 27 водозапорного клапана 22, расположенной на вводной части корпуса 28. Одновременно с вхождением в контакт соединительных головок 24, 27 под действием кольцевого выступа 32 перемещается наружная втулка 31 до полного открытия кольцевого щелевого зазора, и поток воды подается от пожарного трубопровода 3 в ствол 2. Следует отметить, что в принятом устройстве давление воды на подвижное седло минимизировано, что позволяет применять актуаторы сравнительно небольшой мощности. Насадок 5 с использованием приводов изменения угла распыливания 6 формирует струю воды. Пожаротушение осуществляется в автоматическом режиме устройством управления 11 по программе строчным сканированием струей по площади очага загорания. Перемещение мобильного устройства 14 и пожаротушение пожарными роботами 1 может также осуществляться в дистанционном режиме от пульта дистанционного управления 10.
Предложенная мобильная роботизированная установка пожаротушения является эффективным автоматическим и дистанционно управляемым средством борьбы с пожарами, позволяющим адресно перемещать пожарные роботы на значительные расстояния к очагу загорания и направлять мощный поток огнетушащего вещества непосредственно на очаг загорания, обнаруженный в ранней стадии, а также высвободить человека из опасных для жизни аварийных зон.
В отличие от известных, предложенная мобильная роботизированная установка пожаротушения на базе пожарных роботов с телескопическим манипулятором, открывающим водозапорные клапаны, позволяет заменить водозапорные клапаны, оснащенные приводами с дистанционным управлением с системой организации управления, электроснабжения и контроля..
Эти отличительные особенности значительно упрощают и удешевляют устройство, делает его более простым и удобным в эксплуатации.

Роботизированная установка пожаротушения мобильная на базе пожарных роботов с телескопическим манипулятором и водозапорных клапанов с подвижным седлом относится к роботизированным установкам пожаротушения. Роботизированная установка содержит два и более пожарных робота, включающих в себя лафетный ствол с приводами вертикального и горизонтального наведения, насадок с приводом изменения угла распыливания, устройство обнаружения загорания, соединенные с блоком коммутации, который на выходе соединен по радиоканалу через блок радиоуправления с пультом дистанционного управления и устройством управления, соединенным через приемно-контрольное устройство с пожарными извещателями; мобильное устройство, оснащенное транспортным приводом, устройством стыковки, путевым датчиком и аккумулятором, соединенными на входе с блоком управления мобильным устройством, а на его выходе с разъемом электропитания и по радиоканалу с пультом дистанционного управления и устройством управления, водозапорные клапаны, установленные на пожарном трубопроводе в местах водозабора. Согласно изобретению устройство стыковки пожарного робота выполнено в виде телескопического манипулятора, включающего в себя подвижную соединительную головку, герметично установленную на трубном вводе ствола, перемещаемую поступательно актуатором для герметичной стыковки с водозапорным клапаном и его открытия, содержащим ответную соединительную головку, корпус с фиксированно установленным в нем по оси потока рабочей среды клапаном сферической формы, подвижно установленное в корпусе седло, подпружиненное установленной на корпусе наружной втулкой, перемещаемое кольцевым выступом соединительной головки манипулятора. Предложенное устройство позволяет применять водозапорные устройства без приводов с дистанционным управлением, что значительно упрощает и удешевляет устройство и систему управления, делает устройство более простым и удобным в эксплуатации. 2 ил.
Роботизированная установка пожаротушения мобильная на базе пожарных роботов с телескопическим манипулятором и водозапорных клапанов с подвижным седлом, содержащая два и более пожарных робота, включающих в себя лафетный ствол с приводами вертикального и горизонтального наведения, насадок с приводом изменения угла распыливания, устройство обнаружения загорания, соединенные с блоком коммутации, который на выходе соединен по радиоканалу через блок радиоуправления с пультом дистанционного управления и устройством управления, соединенным через приемно-контрольное устройство с пожарными извещателями; мобильное устройство, оснащенное транспортным приводом, устройством стыковки, путевым датчиком и аккумулятором, соединенными на входе с блоком управления мобильным устройством, а на его выходе с разъемом электропитания и по радиоканалу с пультом дистанционного управления и устройством управления, водозапорные клапаны, установленные на пожарном трубопроводе в местах водозабора, отличающаяся тем, что устройство стыковки пожарного робота выполнено в виде телескопического манипулятора, включающего в себя подвижную соединительную головку, герметично установленную на трубном вводе ствола, перемещаемую поступательно актуатором для герметичной стыковки с водозапорным клапаном и его открытия, содержащим ответную соединительную головку, корпус с фиксированно установленным в нем по оси потока рабочей среды клапаном сферической формы, подвижно установленное в корпусе седло, подпружиненное установленной на корпусе наружной втулкой, перемещаемое кольцевым выступом соединительной головки манипулятора.
| RU 93284 U1, 27.04.2010 | |||
| CN 206715094 U, 08.12.2017 | |||
| US 20190168036 A1, 06.06.2019 | |||
| 0 |
|
SU179342A1 | |

