Изобретение относится к машиностроению и может быть использовано в системах терморегулирования изделий авиационной и ракетной техники, а также в других областях техники.
Известен электронасосный агрегат (ЭНА), содержащий корпус, установленные в нем электродвигатель и двухопорный вал насоса с по крайней мере одним рабочим колесом, связанный с валом электродвигателя через компенсирующую муфту [Заявка WO 9220926 МПК: F04D 13/02, 1992 г.]. Втулка компенсирующей муфты установлена на валу электродвигателя, а торсионный вал муфты размещен в полости вала насоса и соединен с ним свободным концом. Недостатком этого ЭНА является недостаточный ресурс, т.к. хотя нагрузки на подшипники валов насоса и электродвигателя снижены за счет компенсирующей муфты, ее торсионный вал выполнен достаточно коротким, и, соответственно, жестким на изгиб. В процессе работы для компенсации несоосности не происходит изгиба торсионного вала, а происходит его перекос, что приводит к быстрому износу его концов, входящих в фигурные отверстия на втулке компенсирующей муфты и в валу насоса. Кроме того, в конструкции отсутствует точная осевая фиксация компенсирующей муфты, что приводит к возможности незначительных осевых перемещений втулки компенсирующей муфты относительно вала электродвигателя, а также торсионного вала относительно втулки и вала насоса, что также способствует износу трущихся поверхностей и снижению ресурса.
Этого недостатка лишен выбранный в качестве прототипа ЭНА, содержащий корпус, установленные в нем электродвигатель и двухопорный полый вал насоса с по крайней мере одним рабочим колесом, связанный с валом электродвигателя через торсионный вал, втулка которого установлена на валу электродвигателя, а свободный конец которого размещен в полости двухопорного вала насоса и жестко соединен с ним [патент РФ №2357103 МПК: F04D 13/06, 2007 г.].
Недостатком этого ЭНА является низкая надежность вследствие малого диаметра торсионного вала и, как следствие, высокого уровня напряжений кручения в нем, что может привести к разрушению торсионного вала и отказу ЭНА. Малый диаметр торсионного вала обусловлен, во-первых, необходимостью его размещения внутри полого вала, а во-вторых, необходимостью иметь малую жесткость на изгиб, чтобы не передавать радиальные нагрузки на вал электродвигателя.
Техническим результатом, достигаемым с помощью заявленного изобретения, является повышение надежности ЭНА.
Этот результат достигается за счет того, что в известном ЭНА, содержащем корпус, установленные в нем электродвигатель и двухопорный полый вал насоса с по крайней мере одним рабочим колесом, связанный с валом электродвигателя через торсионный вал с втулкой, установленной на валу электродвигателя, и свободным концом, размещенным в полости двухопорного вала насоса и жестко соединенным с ним, согласно изобретению на наружной поверхности втулки выполнены не менее двух радиальных выступов, размещенных с боковыми и радиальным зазорами в аксиальных канавках, выполненных на внутренней поверхности ближайшего к электродвигателю конца двухопорного вала насоса.
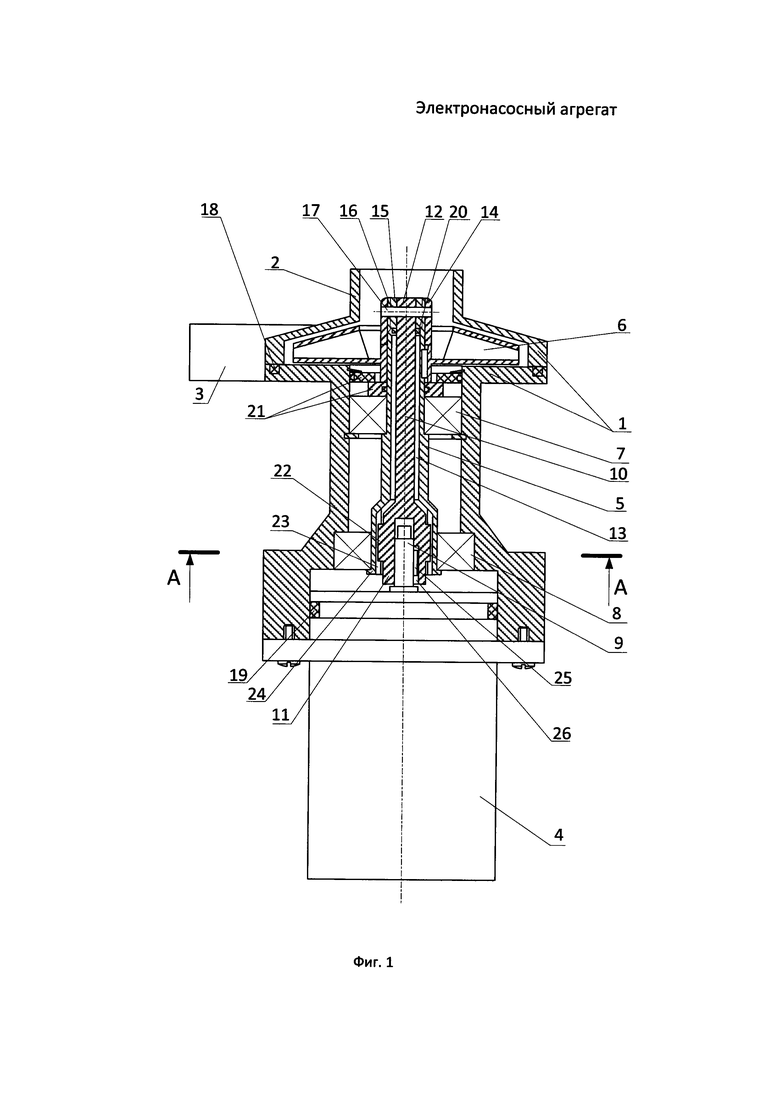
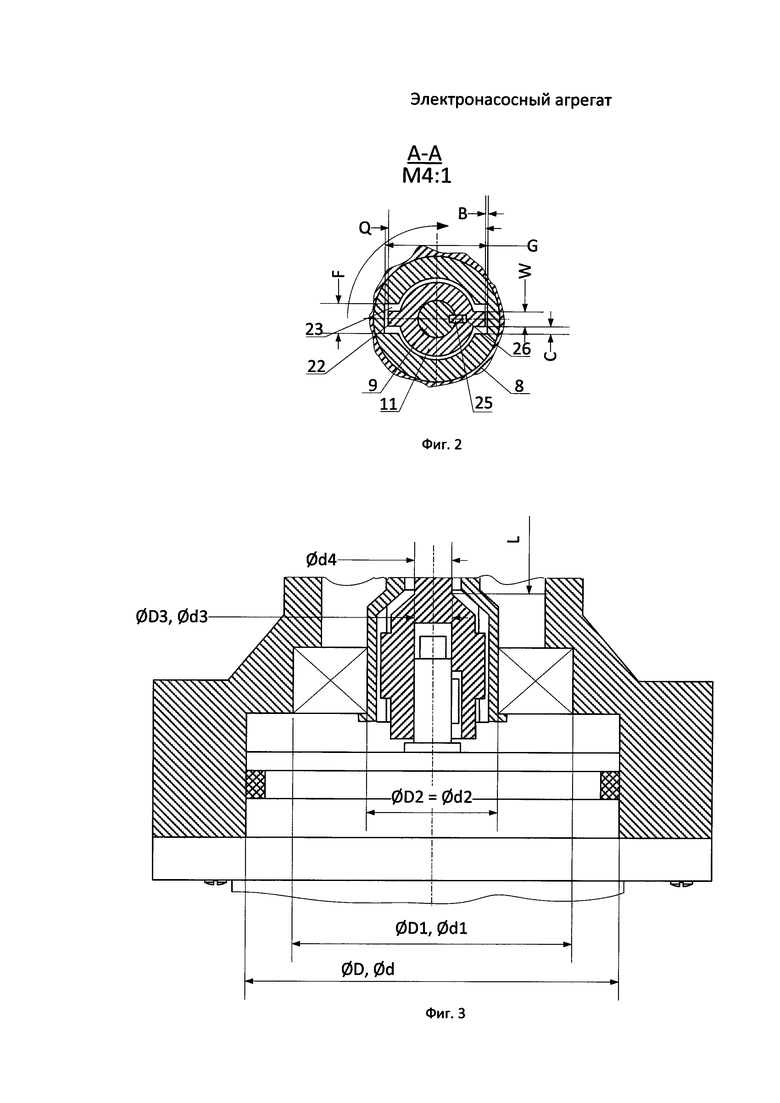
На фиг. 1 приведен пример конкретного выполнения ЭНА, продольный разрез, на фиг. 2 – то же, поперечный разрез по Α-A в увеличенном масштабе, на фиг. 3 – расчетная схема к определению зазоров.
Электронасосный агрегат содержит сборный корпус 1, снабженный входным 2 и выходным 3 патрубками. В корпусе 1 установлены электродвигатель 4 и двухопорный полый вал 5 насоса с по крайней мере одним рабочим колесом 6, размещенный в подшипниках 7 и 8 и связанный с валом 9 электродвигателя 4 через торсионный вал 10 со втулкой 11, установленной на валу 9 электродвигателя 4. Свободный конец 12 торсионного вала 10 размещен в полости 13 двухопорного полого вала 5 насоса и соединен с ним. ЭНА также содержит фиксатор осевого положения рабочих колес, выполненный в виде гайки 14, установленный в противоположном от электродвигателя 4 конце 15 вала 5. На выступающем конце 15 вала 5 насоса выполнена наружная резьба 16, на которой установлена гайка 14. Гайка 14, вал 5 насоса и торсионный вал 10 соединены вместе посредством штифтового соединения - штифта 17, размещенного в совместно обработанных отверстиях деталей 14, 5 и 10. Герметизация корпуса обеспечивается неподвижными уплотнениями 18 и 19, отделение электродвигателя 4 от перекачиваемой жидкости обеспечивается неподвижным уплотнением 20 и подвижным торцовым уплотнением 21. На наружной поверхности втулки 11 выполнены не менее двух радиальных выступов 22 (в данном примере конкретного исполнения - два), размещенных с боковыми и радиальным зазорами в аксиальных канавках 23, выполненных на внутренней поверхности ближайшего к электродвигателю 4 конца 24 двухопорного полого вала 5 насоса. На валу 9 электродвигателя 4 установлена шпонка 25, входящая в шпоночный паз 26 двухопорного полого вала 5 насоса. Стрелкой на фиг. 2 показано направление вращения вала электродвигателя, размерами «В» и «С» показаны зазоры между выступами 22 и канавками 23 в радиальном и угловом направлениях. Выступы заданы размерами Q и W, канавки - размерами F и G.
ЭНА работает следующим образом: при включении электродвигателя 4 его вал 9 через шпонку 25 приводит во вращение втулку 11 и торсионного вал 10. Свободный конец 12 торсионного вала 10 передает крутящий момент через штифт 17 на двухопорный полый вал 5 насоса, и далее - на установленное на последнем рабочее колесо 6, которое перекачивает жидкость. При этом существующая несоосность между валами 5 и 9 выбирается за счет упругой деформации изгиба торсионного вала 10. Так как последний имеет значительную длину, то радиальные усилия, возникающие в местах контакта торсионного вала 10 с валом 5 и втулки 11 с валом 9, незначительны и не приводят к повышенному износу подшипников 7 и 8, а также подшипников электродвигателя 4. Штифт 17 выступает здесь и как фиксатор осевого положения торсионного вала 10, и как стопор гайки 14 от самоотвинчивания. В данном примере конкретного исполнения на валу 5 установлено одно рабочее колесо 6, однако для реализации изобретения несущественно количество колес, поэтому в защищается обобщающий признак «с по крайней мере одним рабочим колесом». Также не всегда является необходимым наличие уплотнений 20 и 21 - например, при применении в качестве электродвигателя 4 серийно выпускаемых бесконтактных электродвигателей в виде ротора с постоянным магнитом, отделенного от статора тонкостенной металлической перегородкой. Поскольку два радиальных выступа 22 размещены с боковыми и радиальным зазорами в аксиальных канавках 23, то при нормальной работе ЭНА отсутствует контакт поверхностей выступов с поверхностями канавок, что не вызывает шума при работе ЭНА. Конкретная величина боковых и радиальных зазоров, с которыми выступы размещены в аксиальных канавках, зависит от допусков на соосность между валом электродвигателя и двухопорным полым валом насоса, а также от крутящего момента на валу электродвигателя и жесткости торсионного вала на кручение, и рассчитывается методами обычного проектирования в зависимости от геометрической формы выступов и канавок. При простейшей форме выступов и канавок, какая показана на фиг. 2 можно сформулировать, что радиальный зазор «В» должен быть не меньше суммы максимально возможной несоосности двухопорного полого вала 5 относительно вала 9 электродвигателя 4 и несимметричностей аксиальных канавок и выступов в радиальном направлении, что может быть рассчитано из величин допусков диаметров и отклонений форм и поверхностей деталей ЭНА. Рассмотрим расчетную схему на фиг. 3 и рассчитаем необходимые минимальные зазоры: на фиг. 3 размерами обозначены следующие размеры, причем для внутренних диаметров обозначены максимально возможные с учетом поля допуска размеры, а для внешних - минимально возможные с учетом поля допуска размеры:
D - диаметр расточки корпуса 1 под электродвигатель 4;
d - диаметр посадочной поверхности электродвигателя 4;
D1 - диаметр расточки корпуса 1 под подшипник 8;
d1 - наружный диаметр наружного кольца подшипника 8;
D2 - внутренний диаметр внутреннего кольца подшипника 8;
d2 - наружный диаметр посадочного участка полого вала 5, при этом на фиг. 3 указано, что эти диаметры равны друг другу, что справедливо из-за того, что внутренние кольца подшипников, как правило, сажаются на валы с натягом;
D3 - диаметр расточки втулки 11 под вал электродвигателя 4;
d3 - наружный диаметр вала электродвигателя 4;
d4 - наружный диаметр самого тонкого участка торсионного вала 10;
L - длина вышеупомянутого участка торсионного вала 10 до места вхождения в него штифта 17.
Кроме указанных геометрических размеров в расчете участвуют величины несоосностей между поверхностями и несимметричности пазов выступов:
Δ1 - несоосность вала электродвигателя 4 относительно его посадочной поверхности - указывается в документации на электродвигатель;
Δ2 - несоосность расточки корпуса 1 под подшипник 8 относительно расточки корпуса 1 под электродвигатель 4 - указывается в чертеже корпуса 1;
Δ3 - несоосность наружного диаметра наружного кольца подшипника 8 относительно внутреннего диаметра внутреннего кольца подшипника 8 - указывается в документации на подшипник;
Σ1 - несимметричность размера G пазов 23 относительно диаметра d2 - указывается в чертеже полого вала 5 (в радиусном выражении);
Σ2 - несимметричность размера Q выступов 22 относительно диаметра D3 - указывается в чертеже торсионного вала 10 (в радиусном выражении).
Σ3 - несимметричность размера F пазов 23 относительно диаметра d2 - указывается в чертеже полого вала 5 (в радиусном выражении);
Σ4 - несимметричность размера W выступов 22 относительно диаметра D3 - указывается в чертеже торсионного вала 10 (в радиусном выражении).
Очевидно, что в самом худшем случае сочетания расположения деталей теоретическая максимально возможная несоосность между валом 10 и валом 5
Δmax=Δ1+Δ2+Δ3.
При этом реальная величина несоосности Δ может быть увеличена на сумму полуразностей действительных размеров (с учетом допусков) в каждом сопряжении, а именно: в сопряжении электродвигателя с корпусом (D-d)/2, в сопряжении подшипника с корпусом (D1-d1)/2 и в сопряжении вала электродвигателя с торсионным валом (D3-d3)/2. Вследствие вышеописанного равенства D2=d2 (из-за посадки с натягом) эти диаметры в расчете не участвуют.
Таким образом,
Δ=Δmax+(D-d)/2+(D1-d1)/2+(D3-d3)/2=Δ1+Δ2+Δ3+(D-d)/2+(D1-d1)/2+(D3-d3)/2
Кроме того, величина необходимого зазора «В» должна быть увеличена на сумму максимально возможных несимметричностей Σ1 и Σ2 (в радиусном выражении), т.е.
В≥Δ1+Δ2+Δ3+(D-d)/2+(D1-d1)/2+(D3-d3)/2+Σ1+Σ2.
Понятно, что в полученном математическом выражении указан знак «больше или равно», т.к. задание его конкретным размером невозможно из-за неизбежного в технике допуска на этот размер. Величина превышения фактического зазора над минимально необходимым должна быть минимально возможной (чтобы избежать увеличения габаритов) и в каждом конкретном случае определяется экономической целесообразностью установления конкретного допуска на эту величину. В таком случае во всех условиях эксплуатации отсутствует возможность заклинивания выступов в аксиальных канавках в радиальном направлении.
Аналогично можно рассчитать, что величина зазора «С» должна быть не менее суммы максимально возможной несоосности двухопорного полого вала 5 относительно вала 9 электродвигателя 4, несимметричностей пазов и выступов в тангенциальном направлении и величины тангенциального смещения нижней кромки правой (на фиг. 2) аксиальной канавки 23 к нижней кромке правого выступа 22. Это смещение (что приводит к изменению зазора «С» при работе ЭНА) вызвано угловой деформацией торсионного вала 10 и легко рассчитывается, исходя из величины номинального крутящего момента на валу 9 электродвигателя 4 и известных геометрических размерах торсионного вала 10.
На основании вышеприведенных зависимостей аналогично доказывается, что теоретический зазор Стеор, необходимый для компенсации возможных несоосностей и допусков на детали и комплектующие
Стеор≥Δ1+Δ2+Δ3+(D-d)/2+(D1-d1)/2+(D3-d3)/2+Σ3+Σ4.
Величина γ угловой деформации участка торсионного вала длиной L и диаметром d4 при номинальной величине передаваемого крутящего момента Мном, как известно из курса сопротивления материалов, составит
γ=МномL/GJp,
где L - длина участка торсионного вала диаметром d4, G - модуль упругости второго рода материала торсионного вала, Jp - момент сопротивления торсионного вала кручения, равный
Jp=πd44/32 (В.И. Феодосьев. «Сопротивление материалов», издательство «Наука», главная редакция физико-математической литературы, М., 1972, стр. 85, 86).
Линейное перемещение наиболее удаленной от оси торсионного вала 10 точки выступа 22, находящейся от нее на расстоянии
 (по теореме Пифагора), при повороте выступов на угол γ, составит величину
(по теореме Пифагора), при повороте выступов на угол γ, составит величину
 Пересчитав линейное перемещение 1 выступов в тангенциальное U по правилам геометрии, получим
Пересчитав линейное перемещение 1 выступов в тангенциальное U по правилам геометрии, получим

Для исключения контакта выступов с аксиальными канавками при деформации кручения торсионного вала под действием передаваемого крутящего момента необходимо
С≥Стеор+U, или

В таком случае во всех условиях эксплуатации отсутствует возможность контакта кромок выступов с кромками аксиальных канавок и, соответственно, отсутствуют шум и износ упомянутых кромок. Приведенный расчет показывает возможность определения гарантированных зазоров и показаны принципы проведения такого расчета для любых конструкций.
В случае отказа высоконагруженных деталей ЭНА - при обрыве торсионного вала 10, что может быть вызвано как высокими значениями напряжений кручения из-за малого диаметра торсионного вала, так и скрытыми дефектами материала этого вала - волосовинами, микротрещинами и т.п., которые с течением времени работы под нагрузкой могут увеличиваться и развиваться - кромки выступов 22 начинают контактировать с кромками аксиальных канавок 23, передавая крутящий момент с втулки 11 торсионного вала 10 на двухопорный полый вал 5. При этом двухопорный полый вал 5 и установленное на нем рабочее колесо 6 продолжают вращаться с той же скоростью и крутящим моментом, что и до обрыва торсионного вала, что обеспечивает неизменность гидравлических параметров - производительности и напора ЭНА. При этом за счет постоянных незначительных относительных перемещений выступов 22 и канавок 23 из-за имеющейся несоосности валов 5 и 10 усиливается шум ЭНА, что ухудшает акустические условия на борту объекта авиационной и космической техники, но не приводит к функциональному отказу ЭНА и изменению параметров системы терморегулирования, и не приводит к изменению программы полета. ЭНА может быть заменен при послеполетном обслуживании (в случае использования в авиационной технике) или заменен на борту космического объекта космонавтами на имеющийся из комплекта ЗИП. Также возможно продолжение работы ЭНА после обрыва торсионного вала до полного использования его ресурса, если увеличение шума ЭНА при работе будет признано некритичным. Признак «на наружной поверхности втулки выполнены не менее двух радиальных выступов» обеспечивает снижение нагрузки на выступы и более равномерную работу ЭНА (снижение до минимума радиальной нагрузки на вал электродвигателя) после незначительного периода приработки путем износа первоначально нагруженного одного из выступов, т.к. вероятность обеспечения равных зазоров по каждому выступу крайне мала, и в начале работы ЭНА момент будет передаваться каким-то одним из имеющихся выступов. Также следует заметить: несмотря на то, что фактический размер зазора практически не влияет на габариты ЭНА, величина превышения фактического зазора «В» над минимально необходимым должна быть минимально возможной, так как это повышает надежность торсионного вала ЭНА при пусках. Дело в том, что пусковой момент электродвигателя Мп превышает номинальный Мном в 4-5 раз, при этом напряжения кручения в торсионном валу также в 4-5 раз выше, чем при работе ЭНА в установившемся режиме. При большой величине зазора «В» при пуске электродвигателя ЭНА происходит закручивание торсиона на всю возможную расчетную величину под воздействием пускового момента, с возникновением максимально возможных напряжений кручения. При минимально необходимой величине зазора «В», как указано в выведенном выше неравенстве, величина α закручивания торсионного вала ограничивается этим зазором, и далее пусковой момент передается выступами на стенки аксиальных канавок. Сам же торсионный вал передает крутящий момент
Мк=αGJp/L,
а выступы передают момент Мв=Мп-Мк
Таким образом, воздействующий при пуске ЭНА на торсионный вал крутящий момент снижается со значения Мп до значения Мк, что, кстати, может быть весьма существенным снижением - в идеальном случае - когда все упомянутые в вышеприведенных выражениях несоосности и несимметричности равны нулю и минимальном зазоре «В», рассчитанном только из угла закрутки γ (угол закрутки от номинального момента), передаваемый торсионным валом при пуске ЭНА крутящий момент будет ограничен номинальным моментом Мном, т.е. снижен в 4-5 раз по отношению к ЭНА с достаточно большим размером зазора. Понятно, что нулевыми несоосности и несимметричности быть выполнены не могут, но т.к. каждое из этих значений практически на порядок меньше, чем величина угловой деформации γ торсионного вала под воздействием номинального момента, реально выполнить зазор «В» с величиной, которая ограничит передаваемый момент величиной (1,5÷1,8) Мном, что, соответственно, снизит напряжения кручения в моменты пуска и повысит надежность.
В результате использования изобретения повышается надежность ЭНА, так как основная функция ЭНА выполняется даже в случае разрушения наиболее нагруженной детали ЭНА - торсионного вала. Повышение надежности особенно ценно для изделий космической техники, характеризующихся значительной стоимостью доставки сменного оборудования и трудностью замены выработавших ресурс агрегатов.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОНАСОСНЫЙ АГРЕГАТ | 2018 |
|
RU2680635C1 |
| ЭЛЕКТРОНАСОСНЫЙ АГРЕГАТ | 2007 |
|
RU2357103C2 |
| ЭЛЕКТРОНАСОСНЫЙ АГРЕГАТ | 2007 |
|
RU2358161C2 |
| НАСОСНЫЙ АГРЕГАТ | 2004 |
|
RU2280194C1 |
| Магнитный редуктор, встраиваемый в электродвигатель | 2017 |
|
RU2683587C1 |
| ДУБЛИРОВАННЫЙ ВОЛНОВОЙ ПРИВОД | 2008 |
|
RU2377456C1 |
| Конвертор | 1974 |
|
SU526668A1 |
| УСТРОЙСТВО ДЕЛЕНИЯ ПОТОКА ЖИДКОСТИ | 2022 |
|
RU2808161C1 |
| Стенд ресурсных испытаний роторов магистральных насосов | 2020 |
|
RU2730740C1 |
| Транспортная система, содержащая трубопровод и транспортное средство для перемещения внутри трубопровода | 2019 |
|
RU2714277C1 |
Изобретение относится к машиностроению и может быть использовано в системах терморегулирования изделий авиационной и ракетной техники. Электронасосный агрегат содержит корпус (1) и установленные в нем электродвигатель (4) и двухопорный полый вал (5) насоса с по крайней мере одним рабочим колесом (6), связанный с валом (9) электродвигателя (4) через торсионный вал (10). Втулка (11) торсионного вала (10) установлена на валу (9) электродвигателя (4), а свободный конец вала (10) размещен в полости вала (5) и жестко соединен с ним. На наружной поверхности втулки (11) выполнены не менее двух радиальных выступов (22), размещенных с боковыми и радиальным зазорами в аксиальных канавках (23), выполненных на внутренней поверхности ближайшего к электродвигателю (4) конца вала (5) насоса. Изобретение направлено на повышение надежности. 3 ил.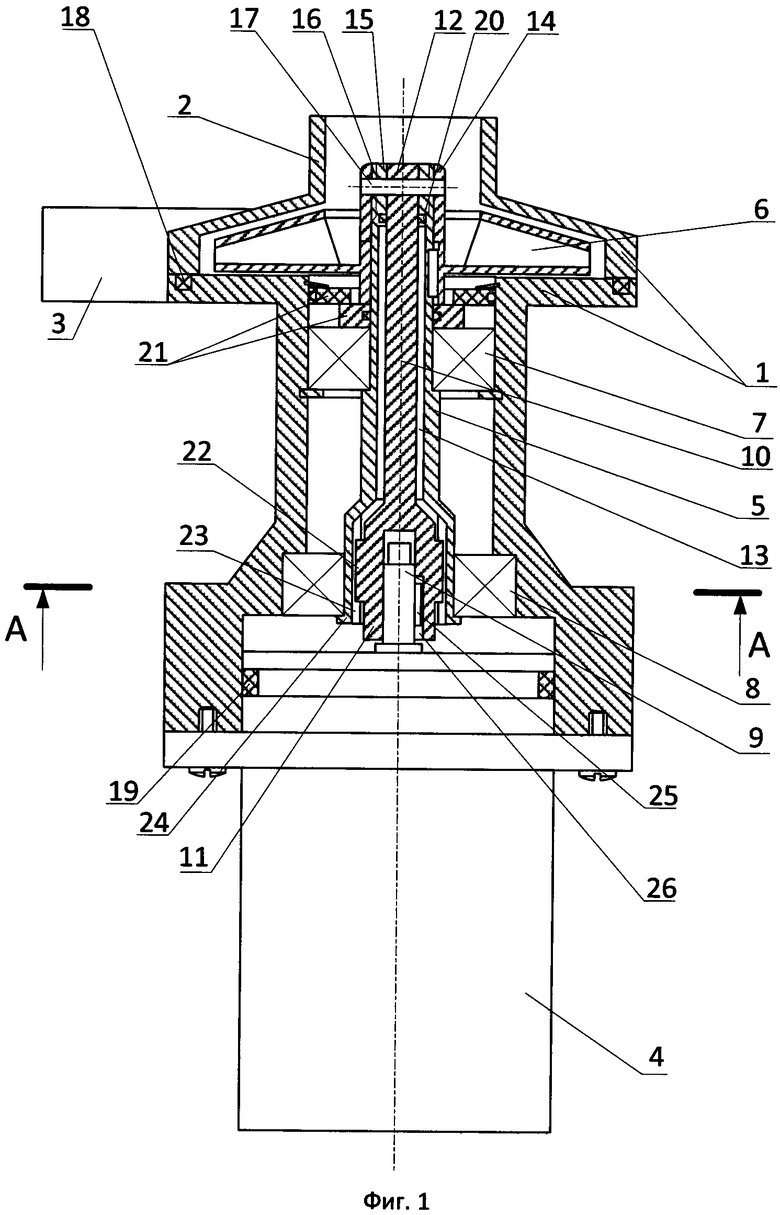
Электронасосный агрегат, содержащий корпус, установленные в нем электродвигатель и двухопорный полый вал насоса с по крайней мере одним рабочим колесом, связанный с валом электродвигателя через торсионный вал со втулкой, установленной на валу электродвигателя, и свободным концом, размещенным в полости двухопорного вала насоса и жестко соединенным с ним, отличающийся тем, что на наружной поверхности втулки выполнены не менее двух радиальных выступов, размещенных с боковыми и радиальным зазорами в аксиальных канавках, выполненных на внутренней поверхности ближайшего к электродвигателю конца двухопорного вала насоса.
| ЭЛЕКТРОНАСОСНЫЙ АГРЕГАТ | 2007 |
|
RU2357103C2 |
| WO 1992020926 A1, 26.11.1992 | |||
| US 9470075 B2, 18.10.2016 | |||
| US 3938398 A1, 17.02.1976 | |||
| CN 204942048 U, 06.01.2016. | |||

