Изобретение относится к военной и специальной технике, а именно к дистанционно-управляемым транспортным средствам, предназначенным для использования в составе роботизированных комплексов автономного полигонного оборудования.
Известна самодвижущаяся платформа робототехнического комплекса (см. патент RU №2583254 С1, опубл. 10.05.16 г.), принятая за прототип. Изобретение относится к базовым шасси робототехнических комплексов, предназначенных для ведения дистанционной работы в боевых условиях. Самодвижущаяся платформа робототехнического комплекса содержит бронированный корпус, ходовую систему с электроприводом и стойками, силовую часть, автономный источник энергии с двигателем внутреннего сгорания. Несущий корпус платформы, сваренный из броневых стальных листов, разделен внутренними переборками на четыре отделения: моторное, аппаратное, генераторное и аккумуляторное. В платформе установлен гусеничный движитель с резинометаллическими гусеницами, на внутренней поверхности которых выполнены центральный и боковые гребни. В качестве силовой части используется смешанная силовая установка, построенная по последовательной схеме, состоящей из дизель-генератора, литийжелезофосфатных аккумуляторных батарей, блока контроля заряда батарей, правого и левого вентильных электродвигателей, выполненных с возможностью передачи через двухступенчатые цилиндрические редукторы крутящего момента на ведущие звездочки движителя, блока управления вентильными двигателями. Редукторы выполнены с возможностью переключения на прямую или понижающую передачу. Подвеска с пружинно-гидравлическими амортизаторами выполнена по модульному принципу с парным расположением сдвоенных обрезиненных опорных катков. В конструкции подвески предусмотрены восемь балансиров опорных катков, закрепленных на однотипных фермах, которые в свою очередь крепятся непосредственно на борт корпуса платформы. Для охлаждения электродвигателей применена жидкостная система охлаждения, включающая насос, радиатор, расширительный бачок и термореле.
Недостатками прототипа являются:
- недостаточная маневренность шасси самодвижущейся платформы;
- сложность конструкции ходовой части;
- недостаточные функциональные возможности использования платформы;
- сложность регулировки ходовой части;
- недостаточная оперативность и эффективность при управлении платформы в различных режимах.
Предлагаемым изобретением решается задача по расширению функциональных возможностей базового шасси роботизированного комплекса.
Технический результат, получаемый при осуществлении изобретения, заключается в создании исполнительного устройства перемещения, обеспечивающего возможность использования в составе роботизированного комплекса полигонного оборудования для транспортировки и предъявления мишеней в условиях полигона при обучении личного состава стрельбе по перемещающимся целям как в режиме ручного управления, так и в автоматическом режиме, прием и обработку сигналов команд управления, их выполнение и формирование ответных сигналов, передачу информации о текущем местоположении, скорости движения и состоянии автономных источников электропитания.
Указанный технический результат достигается тем, что в предлагаемом исполнительном устройстве перемещения, содержащем несущий корпус, сваренный из броневых стальных листов и разделенный на моторное и аккумуляторное отделения, ходовую часть, оснащенную гусеничным движителем с резинометаллическими гусеницами, правый и левый приводы, выполненные с возможностью передачи через редукторы крутящего момента на ведущие звездочки движителя, систему автоматического управления, новым является то, что исполнительное устройство перемещения (ИУП) выполнено с возможностью использования в составе роботизированного модульного комплекса автономного полигонного оборудования при установке штатной полезной нагрузки - модульной установки предъявления появляющейся цели, и при реализации задач по назначению обеспечивает следующие ходовые характеристики: максимальную скорость 12 км/ч, время набора скорости до максимальной не более 3 с, преодолеваемый продольный и поперечный уклон 15°, высота преодолеваемой вертикальной стенки 200 мм, ширина преодолеваемого рва 400 мм, глубина преодолеваемой водной преграды 170 мм, минимальный радиус разворота 1 м, запас хода на одной зарядке аккумуляторов 10000 м, бронированный корпус оснащен мишенным отсеком, открытым с верхней стороны и имеющим бронирование по боковому периметру, закрытым капотом бронированным моторным отделением, в котором размещены электродвигатели с редукторами и система автоматического управления, крышкой аккумуляторного отделения, проушинами для строповки и найтовки, на внешней стороне задней стенки корпуса расположены тумблеры включения бортовых систем и разъем для подключения зарядного устройства аккумуляторных батарей, ходовая часть состоит из двух гусеничных движителей, каждый движитель оснащен тремя сдвоенными опорными катками и зубчатым колесом передней опоры, закрепленными на корпусе, расположенные сзади опорные катки закреплены на кронштейне натяжения гусеницы, регулируемой перемещением кронштейна натяжения путем ее вращения при ослабленных болтах, система автоматического управления ИУП функционально состоит из основного модуля, модуля радиоканала, обеспечивающего в условиях прямой радиовидимости дальность связи до 1000 м, модуля аппаратуры спутниковой навигации, контроллеров бесколлекторных электродвигателей и коммутационно-распределительной аппаратуры, и реализована с возможностью ручного управления или выполнения предварительно запрограммированной последовательности действий и движений в автоматическом режиме, передачи телеметрической информации на пульт управления полигонным оборудованием о местоположении ИУП в реальном режиме времени, скорости перемещения, напряжении аккумуляторных батарей, данных от модульной установки предъявления появляющейся цели.
Выполнение исполнительного устройства перемещения с возможностью использования в составе роботизированного модульного комплекса автономного полигонного оборудования позволяет:
- обеспечить транспортировку подъемного устройства с мишенью при выполнении упражнений по стрельбе;
- реализовать ручной и автоматический режим управления;
- обеспечить передачу на пункт управления стрельбой телеметрической информации о результатах стрельбы с дифференциацией зон поражения;
- реализовать функционирование оборудования по программно обеспеченному сценарию выполнения упражнения.
Соответствие ИУП заданным ходовым характеристикам позволяет обеспечить необходимую маневренность, проходимость и оперативность при реализации задач по назначению в условиях полигона.
Оснащение бронированного корпуса мишенным отсеком, открытым с верхней стороны, позволяет:
- обеспечить размещение мишенного модуля как в транспортном положении, так и его развертывание при проведении стрелковых упражнений;
- обеспечить компактность ИУП с мишенным комплексом при перемещении по полигону, а также при транспортировании всеми видами транспорта.
Оснащение бронированного моторного отделения, в котором размещены электродвигатели с редукторами и система автоматического управления, капотом, а аккумуляторного отделения крышкой позволяет осуществлять доступ к электродвигателям с редукторами, системе автоматического управления и аккумуляторным батареям для проведения визуального осмотра, технического обслуживания, ремонта и замены составных частей.
Оснащение бронированного корпуса проушинами для строповки и найтовки позволяет:
- обеспечить сохранность ИУП в целом, его составных частей при погрузочно-разгрузочных работах и транспортировании;
- обеспечить проведение данных работ при необходимости с использованием специализированной техники.
Размещение на внешней стороне задней стенки тумблеров включения бортовых систем и разъема для подключения зарядного устройства аккумуляторных батарей позволяет:
- обеспечить удобство включения электродвигателей управления движением ИУП;
- обеспечить удобство зарядки аккумуляторных батарей.
Оснащение движителей тремя сдвоенными опорными катками и зубчатым колесом передней опоры, закрепленными на корпусе, позволяет обеспечить простоту, компактность, необходимую устойчивость подвески при маневрировании.
Установка задних опорных катков на кронштейне натяжки гусеницы, регулируемой перемещением кронштейна натяжки, позволяет оперативно обеспечить необходимое усилие натяжения гусениц.
Включение в состав системы автоматического управления ИУП основного модуля, модуля радиоканала, контроллеров бесколлекторных электродвигателей и коммутационно-распределительной аппаратуры позволяет:
- обеспечить в условиях прямой радиовидимости дальность связи до 1000 м;
- реализацию заданных тактико-технических характеристик в ручном и автоматическом режиме;
- обеспечить управление ИУП при размещении на нем модульной установки предъявления появляющейся цели;
- обеспечить получение и передачу телеметрической информации.
Технические решения с признаками, отличающими заявляемое решение от прототипа, не известны и явным образом из уровня техники не следуют. Это позволяет считать, что заявляемое решение является новым и обладает изобретательским уровнем.
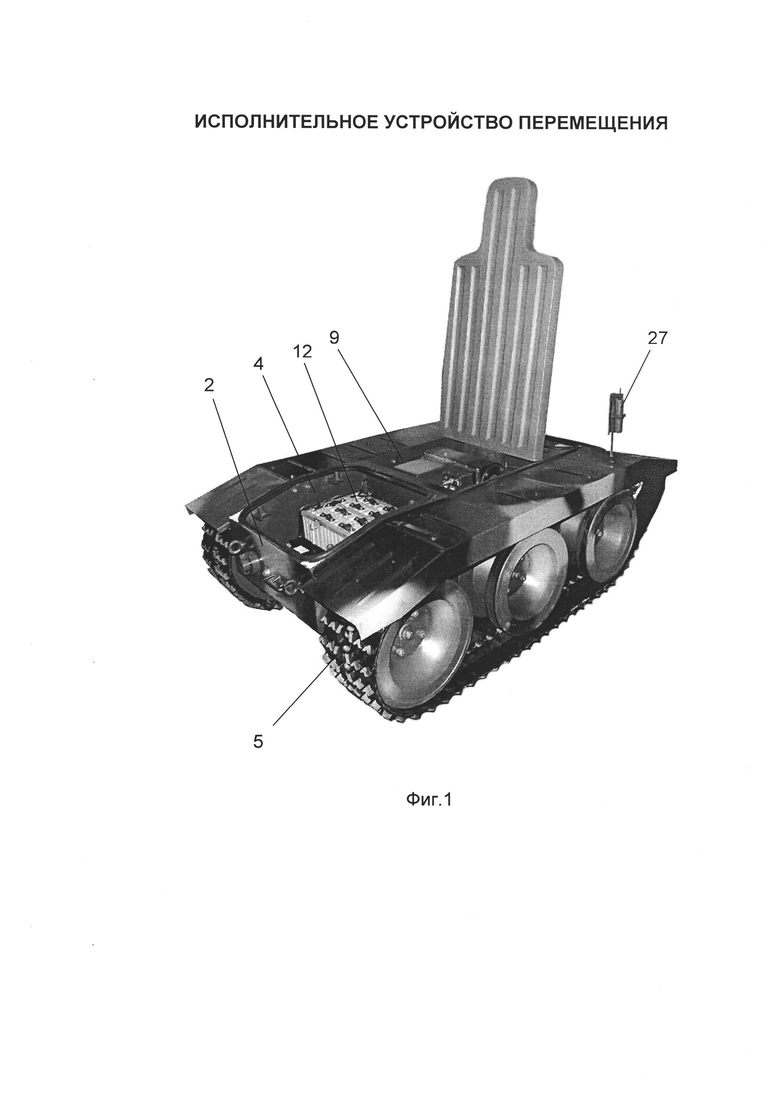
Сущность изобретения поясняется чертежами, где на фиг. 1 показана компоновка ИУП; на фиг. 2 - вид на заднюю стенку корпуса ИУП; на фиг. 3 - вид на правый и левый приводы; на фиг. 4 - ходовая часть ИУП; на фиг. 5 - механизм натяжения гусениц; на фиг. 6 - вид на систему автоматического управления; на фиг. 7 - схема управления исполнительным устройством перемещения.
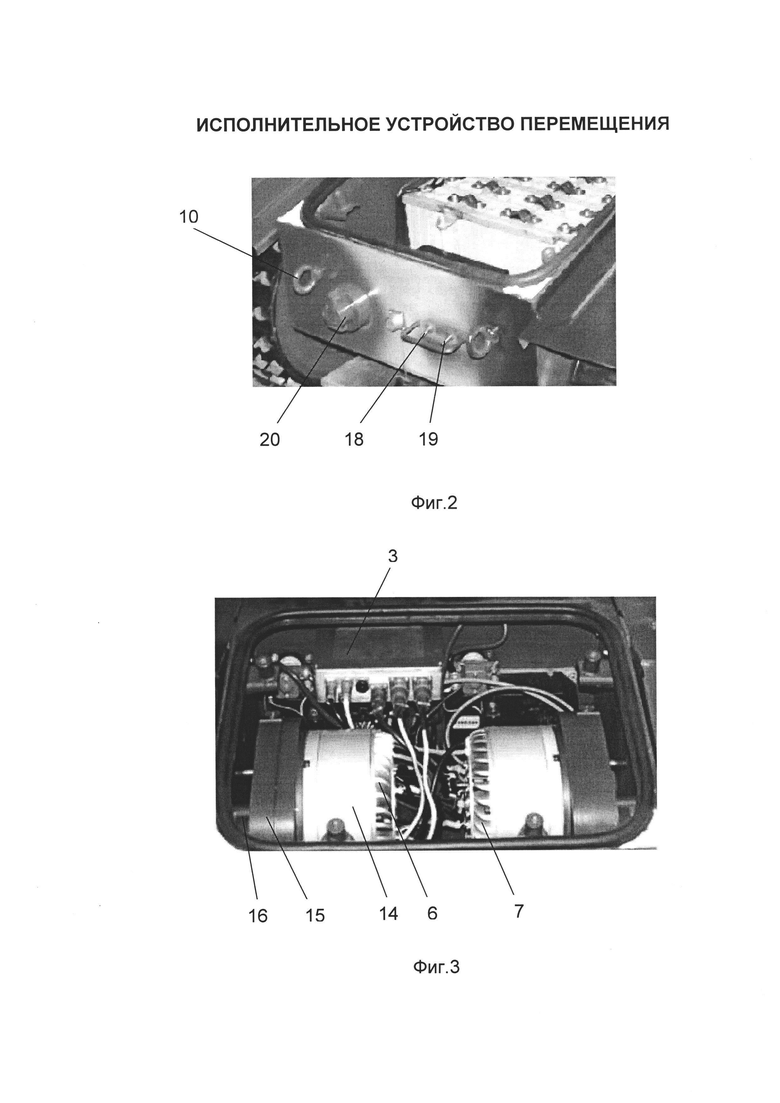
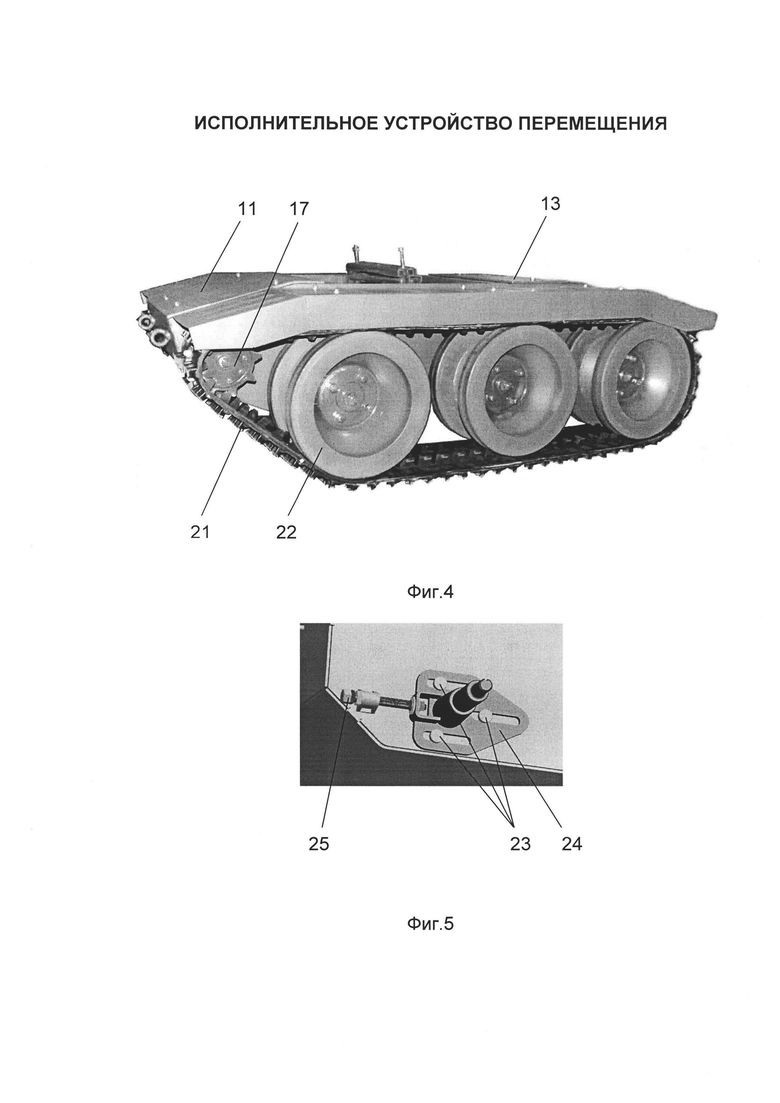
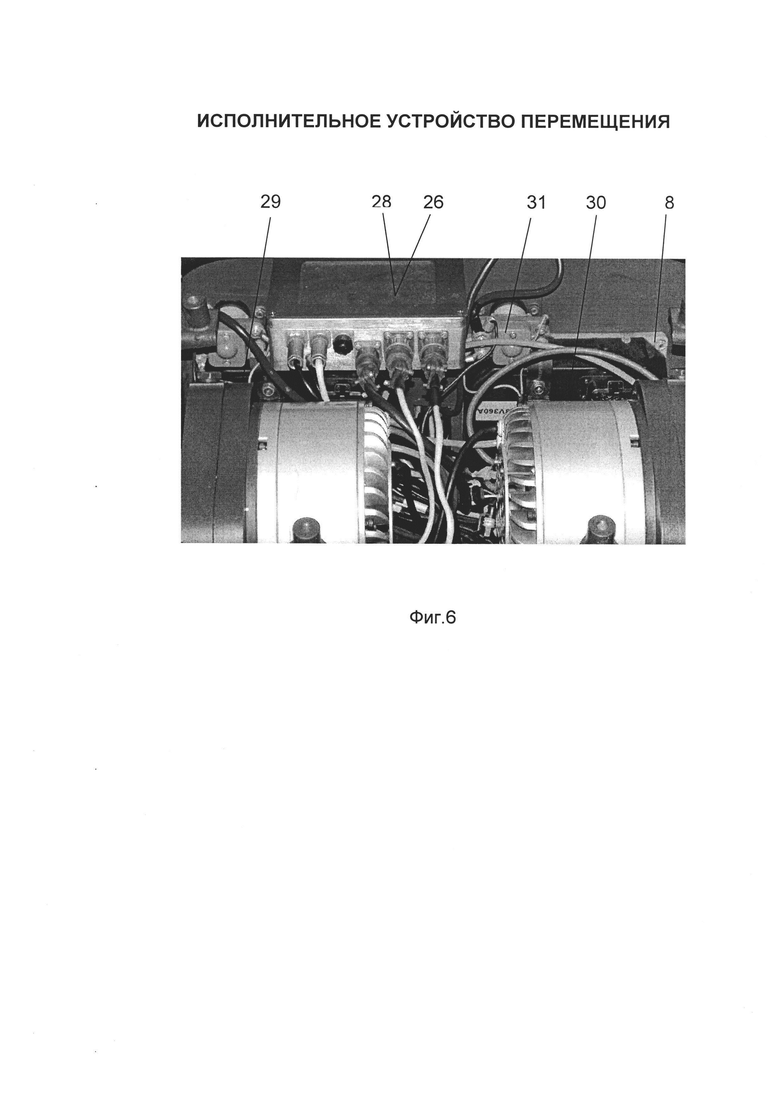
Исполнительное устройство перемещения (ИУП) 1 содержит несущий корпус 2, сваренный из броневых стальных листов и разделенный на моторное 3 и аккумуляторное 4 отделения, ходовую часть 5, правый 6 и левый 7 привода, систему автоматического управления (САУ) 8. Бронированный корпус 2 оснащен мишенным отсеком 9, открытым с верхней стороны и имеющим бронирование по боковому периметру, проушинами для строповки и найтовки 10. Моторное отделение 3, в котором размещены привода 6 и 7 закрыто капотом 11, а аккумуляторное отделение 4 с аккумуляторными батареями 12 - крышкой 13. Каждый привод состоит из бесколлекторного электродвигателя постоянного тока 14, редуктора 15 и передней опоры 16 с зубчатым колесом 17. На внешней стороне задней стенки корпуса 2 расположены тумблеры включения бортовых систем: тумблер включения электродвигателей 18 и тумблер включения управления 19 ИУП 1, разъем для подключения зарядного устройства 20 аккумуляторных батарей. Ходовая часть 5 ИУП 1 состоит из двух гусеничных движителей 21. Каждый движитель 21 оснащен тремя сдвоенными опорными катками 22 и зубчатым колесом 17 передней опоры 16. Расположенные сзади опорные катки закреплены болтами 23 на кронштейне натяжения 24 гусеницы с натяжкой 25. САУ 8 состоит из основного модуля 26, модуля радиоканала 27, модуля аппаратуры спутниковой навигации 28, контроллеров правого 29 и левого 30 бесколлекторных электродвигателей и коммутационно-распределительной аппаратуры 31.
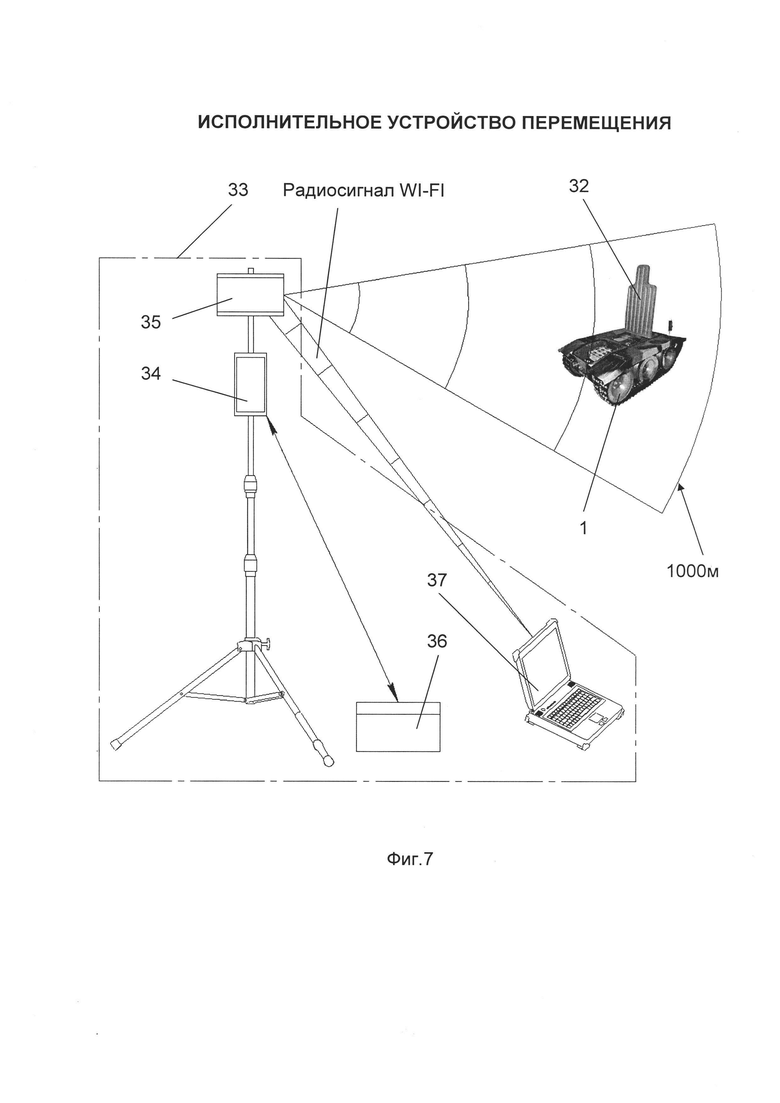
Исполнительное устройство перемещения функционирует следующим образом. ИУП 1 является автономным дистанционно-управляемым транспортным средством с гусеничным движителем 21, с приводами от бесколлекторных электродвигателей постоянного тока 14. ИУП 1 используется в составе роботизированного модульного комплекса автономного полигонного оборудования (РМКАПО). Штатной полезной нагрузкой ИУП является модульной установки предъявления появляющейся цели (МУПЦ) 32. ИУП 1 транспортирует и предъявляет мишени в условиях полигона при обучении личного состава стрельбе по перемещающимся целям.
ИУП1 со штатной нагрузкой обеспечивает реализацию следующих функций:
- транспортировку МУПЦ 32 с мишенью при выполнении упражнений как в режиме непосредственного управления с пульта, так и по заранее составленным программам упражнений в автоматическом режиме;
- прием и обработку сигналов команд управления, их выполнение и формирование ответных сигналов;
- двустороннюю трансляцию получаемых либо запрограммированных команд и телеметрической информации в/из МУПЦ 32 такой как фиксирование попадания в цель с дифференциацией зон поражения, накопление и передачу информации о попаданиях на пульт управления РМКАПО, опускание мишени при попадании пули в зону поражения с выдачей этой информации на пульт управления РМКАПО, подъем /опускание мишени по командам управления;
- передачу информации о текущем местоположении ИУП 1, скорости движения, состоянии аккумуляторных батарей.
Технические характеристики ИУП приведены в таблице 1.

Бронированный корпус 2 защищает внутренние устройства ИУП 1 и полезную нагрузку от воздействия стрелкового оружия и выполнен сварным из высококачественной бронестали. Крышка 13 аккумуляторного отделения 4 обеспечивает доступ к аккумуляторным батареям 12, а капот 11 моторного отделения 3 позволяет осуществлять доступ для обслуживания и ремонта внутренних устройств ИУП 1: электродвигателей 14 с редукторами 15, САУ8. Бронированный корпус 1 снабжен проушинами для строповки и найтовки 10. Полезная нагрузки ИУП 1 размещается в мишенном отсеке 9. Для поднятия мишени мишенный отсек 9 открыт с верхней стороны и имеет бронирование по боковому периметру. Технические характеристики бронекорпуса 2 приведены в таблице 2.
На внешней стороне задней стенки корпуса 2 расположены тумблеры включения бортовых систем: тумблер включения электродвигателей 18 и тумблер включения управления ИУП 19, разъем для подключения зарядного устройства к аккумуляторным батареям 20.
ИУП 1 приводится в движение двумя приводами: правым 6 и левым 7, расположенными в передней части корпуса 2 под капотом 11. Электродвигатель 14 с редуктором 15 крепится к корпусу 2. Передняя опора 16 с зубчатым колесом 17 через корпус 2 присоединяется к редуктору 15 электродвигателя 14.
Ходовая часть 5 ИУП 1 состоит из двух гусеничных движителей 21. Каждый движитель 21 оснащен тремя сдвоенными опорными катками 22 и зубчатым колесом 17 передней опоры 16. Все элементы движителей 21 закреплены на корпусе 2 ИУП 1. Расположенные сзади опорные катки 22 закреплены на кронштейне натяжения 24 гусеницы. Опорные катки 22 имеют резиновую накладку по ободу колеса, что обеспечивает достаточный уровень внутренней амортизации. Гусеницы резиновые, армированные, снабжены грунтозацепами и имеют внутренние поперечные элементы жесткости из высокопрочного композитного материала.
Характеристики ходовой части представлены в таблице 3.

Натяжение гусеницы регулируется перемещением кронштейна натяжения 24 путем вращения натяжки 25 при ослабленных болтах натяжки 23.
Прогиб гусеницы между опорными катками 22 после регулировки должен быть не более 10 мм. Разница левого и правого межосевого расстояния между осью звездочки и регулируемым опорным катком должна быть не более 1 мм.
Комплект аккумуляторных батарей 12 обеспечивает автономное электропитание ИУП 1. Питание осуществляется от батарей литий-железофосфатного типа (Li-FePO4). Аккумуляторное отделение 3 располагается в задней части корпуса 1 и закрывается крышкой 13.
САУ 8 обеспечивает функционирование ИУП 1 как отдельно, так и при установке полезной нагрузки. САУ 8 позволяет осуществлять управление движением ИУП 1, а также осуществлять прозрачную передачу команд и телеметрической информации от полезной нагрузки с использованием одного радиоканала.
Характеристики САУ 8 представлены в таблице 4.
САУ 8 функционирует в следующих режимах:
- непосредственное управление с пульта управления полигонным оборудованием 33;
- выполнение заранее запрограммированной последовательности действий и движений. Программирование осуществляется с пульта управления полигонным оборудованием 33. Установка режимов производится дистанционно по линии радиосвязи.
САУ 8 обеспечивает передачу следующей телеметрической информации на пульт управления полигонным оборудованием 33: местоположение по данным модуля аппаратуры спутниковой навигации 28, скорость перемещения, напряжение аккумуляторных батарей 12, данные от МУПЦ 32. Пульт управления полигонным оборудованием 33 состоит из антенной мачты с радиоэлектронным оборудованием 34, базового цифрового радиомодема 35, источника автономного питания 36, персонального компьютера 37.
При использовании ИУП 1 по назначению включаются все цепи питания ИУП 1, включается питание МУПЦ 32. При исправной установке МУПЦ 32 щит мишени автоматически опускается. Управление движением ИУП 1, подъемом и опусканием щита мишени производится по командам, поступающим с пульта управления полигонным оборудованием по радиоканалу. Проверяется выполнение всех команд на прямолинейное движение и повороты ИУП 1 в ручном режиме, наличие устойчивого сигнала системы спутниковой навигации. ИУП выводится на исходную позицию с помощью ручного управления, производится загрузка сценария упражнения в память ИУП 1 и МУПЦ 32. Дается команда на выполнение сценария. После отработки всех этапов сценария и всех повторов упражнения производится выключение всех бортовых систем ИУП 1 и МУПЦ 32, производится подзарядка аккумуляторных батарей 12.
Таким образом, в предлагаемом изобретении решена задача по достижению технического результата, заключающегося в создании исполнительного устройства перемещения, обеспечивающего возможность использования в составе роботизированного комплекса полигонного оборудования для транспортировки и предъявления мишеней в условиях полигона при обучении личного состава стрельбе по перемещающимся целям как в режиме ручного управления, так и в автоматическом режиме, прием и обработку сигналов команд управления, их выполнение и формирование ответных сигналов, передачу информации о текущем местоположении, скорости движения и состоянии автономных источников электропитания.
| название | год | авторы | номер документа |
|---|---|---|---|
| Роботизированная платформа специального назначения | 2016 |
|
RU2640264C1 |
| Роботизированный мишенный комплекс для тренировки тактики боя в условиях полигона | 2021 |
|
RU2770713C1 |
| РОБОТИЗИРОВАННЫЙ МОДУЛЬНЫЙ КОМПЛЕКС АВТОНОМНОГО ПОЛИГОННОГО ОБОРУДОВАНИЯ | 2017 |
|
RU2667132C1 |
| САМОДВИЖУЩАЯСЯ ПЛАТФОРМА РОБОТОТЕХНИЧЕСКОГО КОМПЛЕКСА | 2015 |
|
RU2583254C1 |
| Наземный роботизированный комплекс | 2023 |
|
RU2819223C1 |
| Универсальная роботизированная платформа | 2016 |
|
RU2639009C1 |
| РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС РАЗВЕДКИ И ОГНЕВОЙ ПОДДЕРЖКИ | 2013 |
|
RU2548207C1 |
| МОДУЛЬ УПРАВЛЕНИЯ ПОЛИГОННЫМ ОБОРУДОВАНИЕМ | 2017 |
|
RU2670395C1 |
| МОДУЛЬНАЯ УСТАНОВКА ПРЕДЪЯВЛЕНИЯ ПОЯВЛЯЮЩЕЙСЯ ЦЕЛИ | 2017 |
|
RU2666465C1 |
| УНИФИЦИРОВАННОЕ НИЗКОСИЛУЭТНОЕ ШАССИ ДЛЯ ВОЕННЫХ ГУСЕНИЧНЫХ МАШИН (ВАРИАНТЫ) | 2009 |
|
RU2399856C1 |
Изобретение относится к исполнительному устройству перемещения (ИУП). Устройство содержит несущий корпус, разделенный на моторное и аккумуляторное отделения, ходовую часть, приводы и систему автоматического управления. Бронированный корпус ИУП оснащен мишенным отсеком. В моторном отделении размещены электродвигатели с редукторами и система автоматического управления. На внешней стороне задней стенки корпуса расположены тумблеры включения бортовых систем и разъем для подключения зарядного устройства аккумуляторных батарей. Ходовая часть состоит из двух гусеничных движителей. Расположенные сзади опорные катки закреплены на кронштейне натяжения гусеницы. Система автоматического управления ИУП функционально состоит из основного модуля, модуля радиоканала, модуля аппаратуры спутниковой навигации, контроллеров бесколлекторных электродвигателей и коммутационно-распределительной аппаратуры. Достигается возможность ручного управления или выполнения предварительно запрограммированной последовательности действий и движений в автоматическом режиме. 7 ил., 4 табл.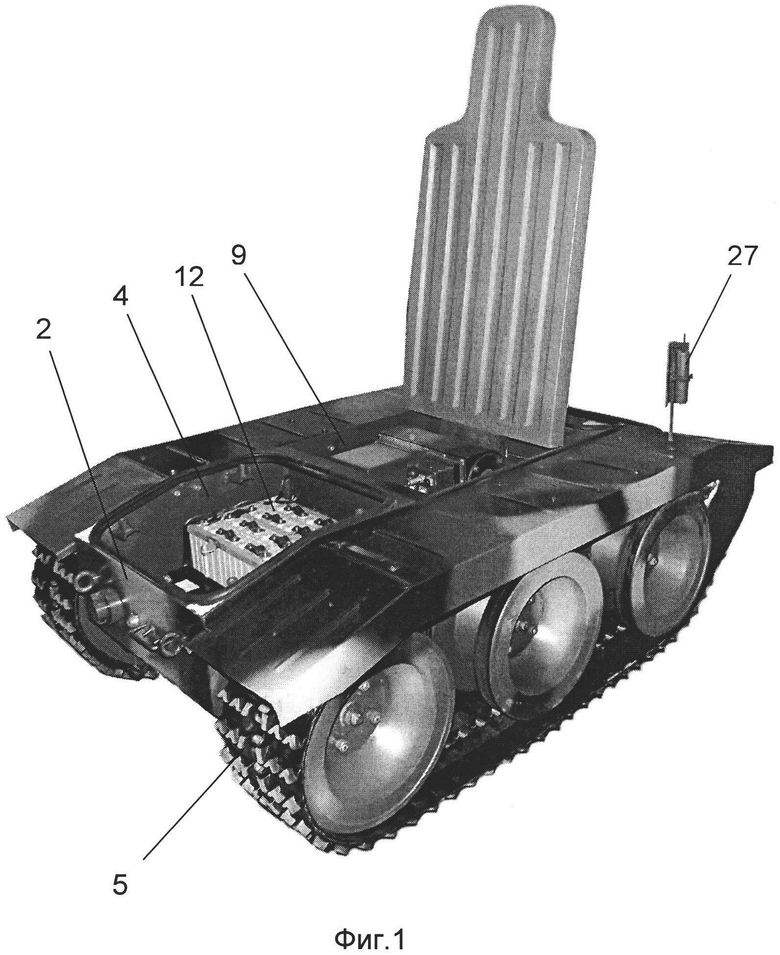
Исполнительное устройство перемещения, содержащее несущий корпус, сваренный из броневых стальных листов и разделенный на моторное и аккумуляторное отделения, ходовую часть, оснащенную гусеничным движителем с резинометаллическими гусеницами, правый и левый приводы, выполненные с возможностью передачи через редукторы крутящего момента на ведущие звездочки движителя, систему автоматического управления, отличающееся тем, что исполнительное устройство перемещения (ИУП) выполнено с возможностью использования в составе роботизированного модульного комплекса автономного полигонного оборудования при установке штатной полезной нагрузки - модульной установки предъявления появляющейся цели, и при реализации задач по назначению обеспечивает следующие ходовые характеристики: максимальную скорость 12 км/ч, время набора скорости до максимальной не более 3 с, преодолеваемый продольный и поперечный уклон 15°, высоту преодолеваемой вертикальной стенки 200 мм, ширину преодолеваемого рва 400 мм, глубину преодолеваемой водной преграды 170 мм, минимальный радиус разворота 1 м, запас хода на одной зарядке аккумуляторов 10000 м, бронированный корпус оснащен мишенным отсеком, открытым с верхней стороны и имеющим бронирование по боковому периметру, закрытым капотом бронированным моторным отделением, в котором размещены электродвигатели с редукторами и система автоматического управления, крышкой аккумуляторного отделения, проушинами для строповки и найтовки, на внешней стороне задней стенки корпуса расположены тумблеры включения бортовых систем и разъем для подключения зарядного устройства аккумуляторных батарей, ходовая часть состоит из двух гусеничных движителей, каждый движитель оснащен тремя сдвоенными опорными катками и зубчатым колесом передней опоры, закрепленными на корпусе, расположенные сзади опорные катки закреплены на кронштейне натяжения резинометаллической гусеницы, регулируемой перемещением кронштейна натяжения путем ее вращения при ослабленных болтах, система автоматического управления ИУП функционально состоит из основного модуля, модуля радиоканала, обеспечивающего в условиях прямой радиовидимости дальность связи до 1000 м, модуля аппаратуры спутниковой навигации, контроллеров бесколлекторных электродвигателей и коммутационно-распределительной аппаратуры, и реализована с возможностью ручного управления или выполнения предварительно запрограммированной последовательности действий и движений в автоматическом режиме, передачи телеметрической информации на пульт управления полигонным оборудованием о местоположении ИУП в реальном режиме времени, скорости перемещения, напряжении аккумуляторных батарей и данных от модульной установки предъявления появляющейся цели.
| САМОДВИЖУЩАЯСЯ ПЛАТФОРМА РОБОТОТЕХНИЧЕСКОГО КОМПЛЕКСА | 2015 |
|
RU2583254C1 |
| СПОСОБ УПРАВЛЕНИЯ СИЛОВОЙ УСТАНОВКОЙ ВЕРТОЛЕТА | 2010 |
|
RU2482024C2 |
| US 2009281660 A1, 12.11.2009 | |||
| СПОСОБ РЕМОНТА ВНЕШНЕЙ ОБШИВКИ КОМПОЗИТНОЙ КОНСТРУКЦИИ | 2006 |
|
RU2412815C2 |

