Изобретение относится к оборудованию стрелковых тиров, военных полигонов или как роботизированная платформа в составе перспективных охранных или тактических роботизированных разведывательно-боевых комплексах и может быть использовано для обучения военнослужащих стрелковому делу, обследованию местности (разведка), охраны периметра, разминирование, выполнять задачи по доставке фугасов и мин направленного действия проведение отдельных задач по огневой поддержке.
Известны устройства для обеспечения мишеней на полигоне или в стрелковом тире.
Известно устройство «Стрелковый аппаратно-программный комплекс боевого тира». RU. Патент №104689. U1. МПК F41G 3/26 (2006.01). Заявка: 2010143433/28, 25.10.2010.
Стрелковый аппаратно-программный комплекс боевого тира, характеризующийся тем, что он содержит смонтированный на основании пулеприемник, расположенный перед пулеприемником резиновый антирикошетный экран для проекции на нем изображения мишеней и исключения рикошета пуль, расположенные перед экраном оптическую камеру с инфракрасным светофильтром и сетевым интерфейсом, отлавливающую изменение освещенности в месте попадания лазерного импульса на экран, тепловизионную камеру с сетевым интерфейсом, отлавливающую изменения температуры в месте попадания пули на экран, а также расположенный перед экраном мультимедийный проектор, при этом указанные камеры соединены с компьютером, который соединен с источником бесперебойного электропитания, например с аккумулятором, комплекс содержит находящиеся на линии огня индивидуальные мониторы, каждый из которых соединен через разделитель видеосигнала с компьютером и монитором оператора, который соединен с разделителем видеосигнала, длина L экрана выбрана больше его высоты Н и находится в пределах L=(1,3-1,8)Н, экран выполнен из взаимозаменяемых быстросъемных резиновых полос, которые расположены параллельно, предпочтительно вертикально и внахлест по отношению друг к другу, при этом экран, проектор, оптическая камера, тепловизионная камера, мониторы, компьютер и источник бесперебойного электропитания выполнены с возможностью их перемещения по основанию тира.
Недостатком является отсутствие возможности перемещения мишени в любом направлении.
Известно устройство «Подвижные мишени для обучения и тренировок стрельбе из боевого стрелкового оружия (варианты)». RU. Патент №126110. U1. МПК F41G 3/26 (2006.01). Заявка: 2012101364/12, 16.01.2012.
1. Подвижные мишени для обучения производству стрельбы из стрелкового оружия, удаленные от огневых рубежей на различные дистанции, отличающиеся тем, что траектория перемещения каждой последующей мишени удалена от общей линии огневых рубежей на дистанцию, большую по сравнению с дистанцией траектории перемещения каждой предыдущей мишени.
2. Подвижные мишени для обучения производству стрельбы из стрелкового оружия по п. 1, отличающиеся тем, что они размещены на тележках, установленных на узкоколейных рельсовых путях, расположенных на различных дистанциях от линии огневых рубежей.
3. Подвижные мишени для обучения производству стрельбы из стрелкового оружия по п. 1, отличающиеся тем, что, по меньшей мере, одна из подвижных мишеней установлена на тележке, передвигающейся по узкоколейному рельсовому пути, расположенному параллельно линии огневых рубежей.
4. Подвижные мишени для обучения производству стрельбы из стрелкового оружия по п. 1, отличающиеся тем, что, по меньшей мере, одна из подвижных мишеней установлена на тележке, передвигающейся по узкоколейному рельсовому пути, расположенному под углом к линии огневых рубежей.
5. Подвижные мишени для обучения производству стрельбы из стрелкового оружия по п. 2, отличающиеся тем, что, по меньшей мере, один узкоколейный рельсовый путь для перемещения по нему тележки с мишенью удален от линии огневых рубежей на дистанцию эффективного огня от 300 до 600 м.
6. Подвижные мишени для обучения производству стрельбы из стрелкового оружия по п. 2, отличающиеся тем, что, по меньшей мере, один узкоколейный рельсовый путь для перемещения по нему тележки с мишенью удален от линии огневых рубежей на дистанцию от 600 до 1000 м.
7. Подвижные мишени для обучения производству стрельбы из стрелкового оружия по п. 1, отличающиеся тем, что они снабжены приводом и выполнены фигурными.
8. Подвижные мишени для обучения производству стрельбы из стрелкового оружия по п. 1, отличающиеся тем, что на линии огневого рубежа учебного участка, предназначенного для обучения тактике ведения огня, расположен операторский пункт с пультом управления, связанный с приводом мишеней.
9. Подвижные мишени для обучения производству стрельбы из стрелкового оружия по п. 7, отличающиеся тем, что каждая фигурная мишень имеет подъемник, управляемый оператором с пульта.
10. Подвижные мишени для обучения производству стрельбы из стрелкового оружия по п. 1, отличающиеся тем, что расположены на учебном участке, предназначенном для обучения тактике ведения огня по подвижным мишеням, разделенном по длине земляным валом на две смежные изолированные учебные зоны, крайняя из которых оборудована фотоэлементами, выдающими сигнал на пульт управления о начале движения стрелка в сторону мишеней.
11. Подвижные мишени для обучения производству стрельбы из стрелкового оружия, удаленные от огневых рубежей на различные дистанции, отличающиеся тем, что линия расположения мишеней, предназначенных для обучения ведения тактике ведения огня, удалена от общей линии огневых рубежей на дистанцию, меньшую по сравнению с дистанцией последующей мишени.
12. Подвижные мишени для обучения производству стрельбы из стрелкового оружия по п. 11, отличающиеся тем, что подвижные мишени размещены на тележках, установленных на узкоколейных рельсовых путях, расположенных на различных дистанциях от линии огневых рубежей.
13. Подвижные мишени для обучения производству стрельбы из стрелкового оружия по п. 11, отличающиеся тем, что, по меньшей мере, одна подвижная мишень удалена от линии огневых рубежей на дистанцию до 300 м.
14. Подвижные мишени для обучения производству стрельбы из стрелкового оружия по п. 11, отличающиеся тем, что, по меньшей мере, одна подвижная мишень удалена от линии огневых рубежей на дистанцию до 600 м.
15. Подвижные мишени для обучения производству стрельбы из стрелкового оружия по п. 12, отличающиеся тем, что учебное место, расположенное со стороны участка, предназначенного для обучения тактике ведения огня, содержит по меньший мере один узкоколейный рельсовый путь, проложенный на дистанции до 300 м от линии огневых рубежей для перемещения по нему тележки с установленной на ней подвижной мишенью.
16. Подвижные мишени для обучения производству стрельбы из стрелкового оружия по п. 12, отличающиеся тем, что учебное место, расположенное со стороны участка, предназначенного для обучения тактике ведения огня, содержит по меньший мере один узкоколейный рельсовый путь, проложенный на дистанции до 600 м от линии огневых рубежей для перемещения по нему тележки с установленной на ней подвижной мишенью.
17. Подвижные мишени для обучения производству стрельбы из стрелкового оружия по п. 11, отличающиеся тем, что подвижные мишени снабжены приводом и выполнены фигурными.
18. Подвижные мишени для обучения производству стрельбы из стрелкового оружия по п. 11, отличающиеся тем, что на линии огневого рубежа учебного участка, предназначенного для обучения тактике ведения огня, расположен операторский пункт с пультом управления, связанный с приводом мишеней.
19. Подвижные мишени для обучения производству стрельбы из стрелкового оружия по п. 17, отличающиеся тем, что каждая фигурная мишень имеет подъемник, управляемый оператором с пульта.
20. Подвижные мишени для обучения производству стрельбы из стрелкового оружия по п. 11, отличающиеся тем, что расположены на учебном участке, предназначенном для обучения тактике ведения огня, разделенном по длине земляным валом на две смежные изолированные учебные зоны (прототип).
Недостатком является отсутствие возможности перемещения мишени в любом направлении.
Техническим результатом является возможность перемещения мишенной установки в любом направлении со скоростью перемещения солдата противника на поле боя.
Технический результат достигается тем, что роботизированная платформа (РП) специального назначения является автономным транспортным средством, состоящим из:
Транспортно-гусеничное шасси:
- корпус;
- движители.
Средства коммуникаций:
- система связи и передачи данных;
- информационно измерительные средства.
Система управления движением:
- информационно-вычислительная система;
- система топопривязки и навигации.
Энергетические установки бортовых систем
- аккумуляторы;
- система электропитания.
А именно:
- движители - гусеничные движителем с приводом от бесколлекторных электродвигателей постоянного тока, причем электропитание двигателей осуществляется от аккумуляторных батарей, а управление осуществляется по радиоканалу в режимах: ручном дистанционном; полуавтоматическом, автоматическом по программе. Одиночное и групповое до 16 РП одновременно, при этом используются навигационные и инерционные бортовые системы
- Корпус - композиционная броня 5-й степени пулезащищенности имеет грузовой отсек с бронированием по боковому периметру для размещения и функционирования различных типов целевых нагрузок, в том числе:
- модули показа роботизированных анатомической формы мишеней;
- средств разведки;
- боевых модулей для применения управляемых средств поражения;
- боевых модулей стрелкового оружия и оружия ближнего боя;
- модулей транспортировки мин и фугасов;
- маскировочных средств, снижающих вероятность обнаружения подразделений.
- транспортировки боеприпасов и медикаментов и других грузов.
с целью использования на территории опорных пунктах, а также при ведении боевых действий мелких тактических групп до роты включительно.
РП имеет закрытое бронированное моторно-трансмиссионный отделение, в котором размещены энергетическая установка, приводная станция, система автоматического управления интегральная шина позволяющая объединить в единую сеть различные исполнительные устройства и датчики.
Внутри корпуса несущая рама, которая обеспечивает крепление внутренних узлов и агрегатов РП, а именно приводной станции, системы автоматического управления, перегородки моторно-трансмиссионного отделения, а также полезной нагрузки, и в состав РП входит съемный подрамник, расположенный в грузовом отсеке, причем приводная станция РП состоит из двух приводов, элементов их крепления и ведущих звездочек левой и правой гусениц, и каждый привод состоит из бесколлекторного электродвигателя постоянного тока, двухступенчатого редуктора и выходного вала, а ходовая часть РП состоит из двух гусеничных движителей, и каждый движитель оснащен резиновой гусеницей с грунтозацепами и тремя сдвоенными опорными роликами из резины, двумя поддерживающими роликами и расположенном впереди по ходу движения узлом натяжителя со звездочкой, а все элементы движителя закреплены на раме, рама крепится к опорным консолям корпуса посредством скоб, внутри корпуса. Такая компоновка ходовой части направлена на достижение высокой подвижности платформы, повышения быстроходности, увеличения проходимости и поворотливости, что делает ее малоуязвимой для поражения противником или стрелком.
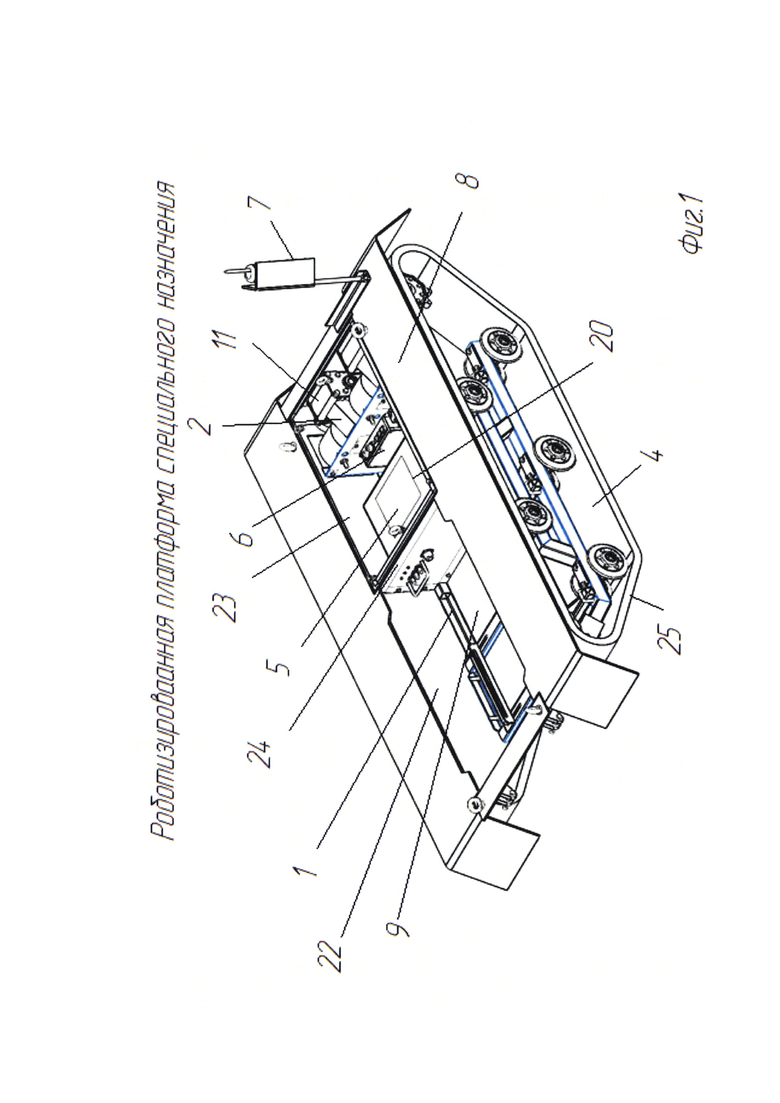
На фиг. 1 изображена роботизированная платформа (РП) специального назначения.
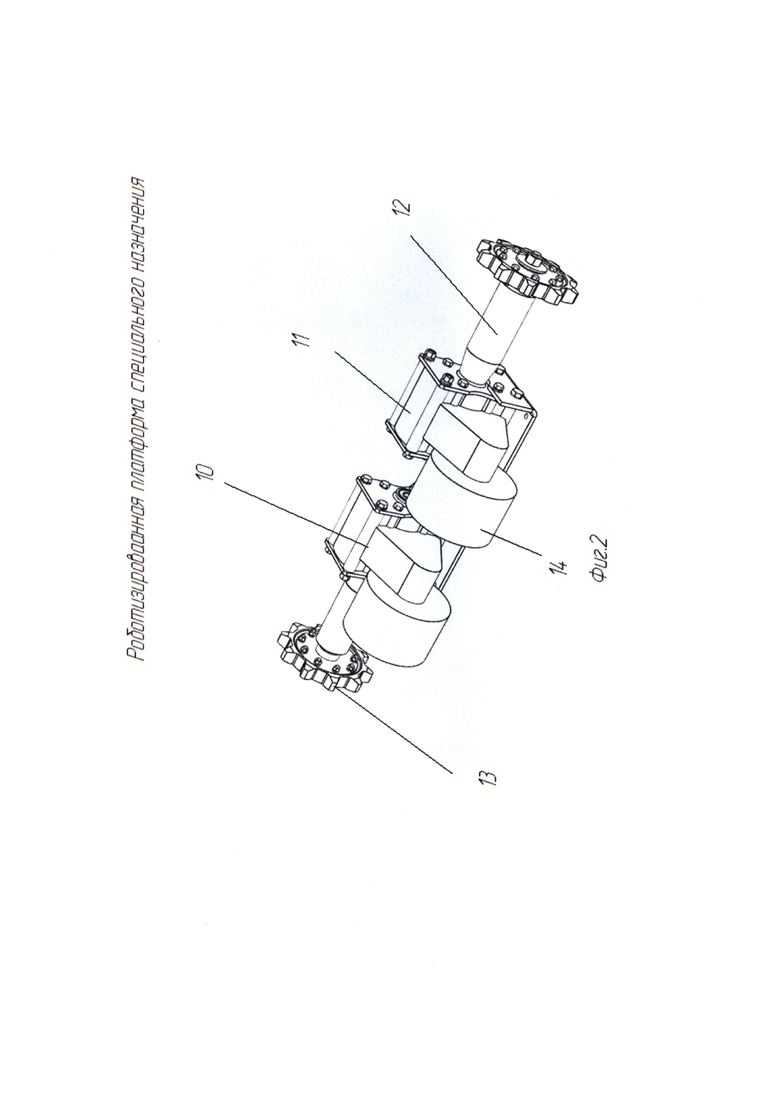
На фиг. 2 изображена приводная станция.
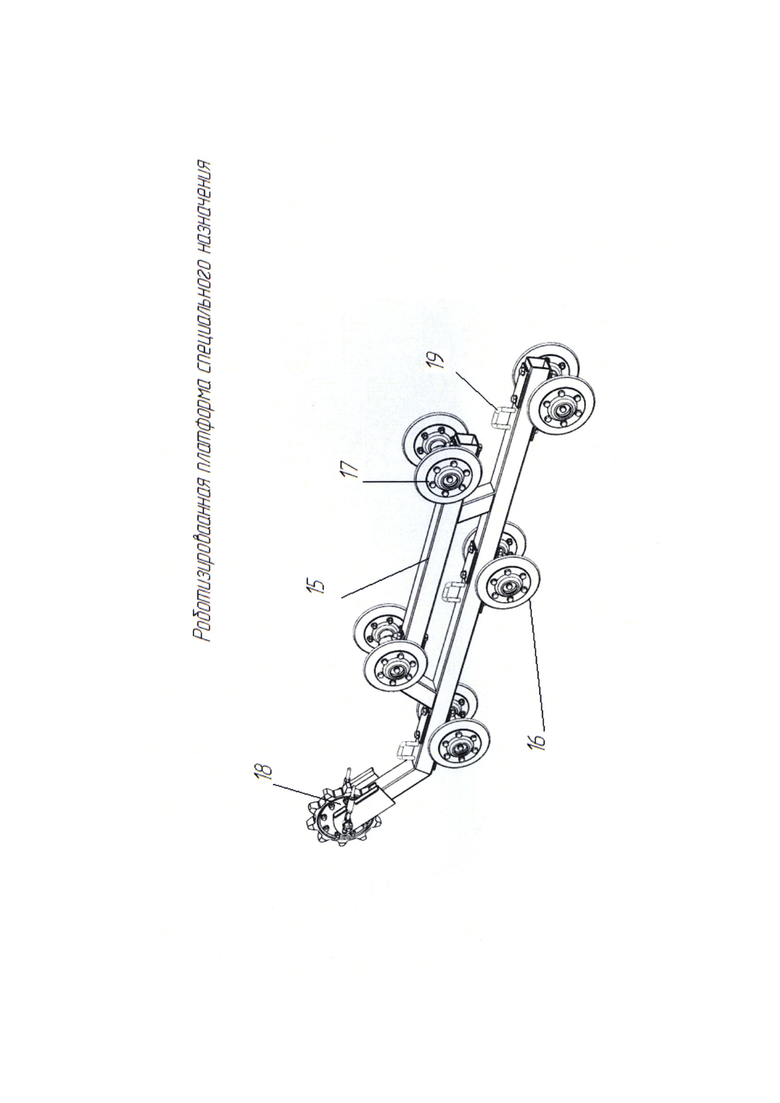
На фиг. 3 изображен гусеничный движитель.
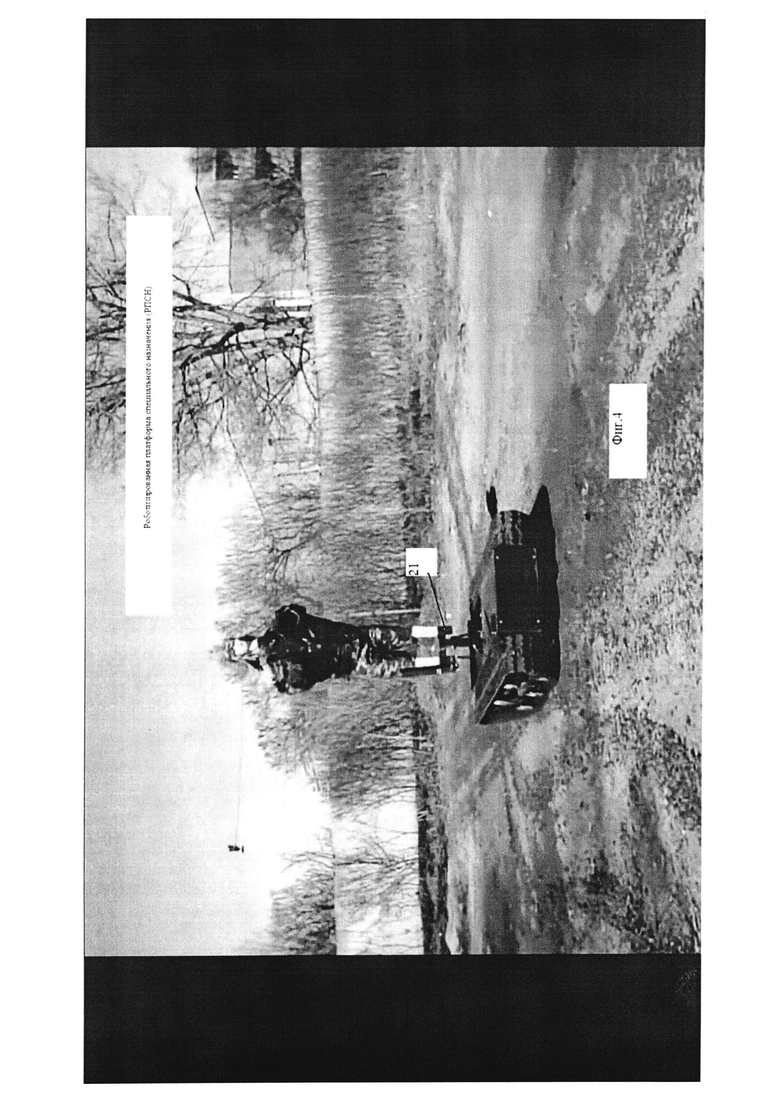
На фиг. 4 изображена роботизированная платформа специального назначения с установленной модульной универсальной установкой предъявления перемещающейся цели.
Роботизированная платформа (РП) специального назначения (Фиг. 1, Фиг. 2, Фиг. 3, Фиг. 4) является автономным транспортным средством с гусеничным движителем с приводом (10) от бесколлекторных электродвигателей (14) постоянного тока.
Штатной полезной нагрузкой РПСН является модульная универсальная установка предъявления появляющихся объемных имитаторов целей (Фиг. 4) (21).
Электропитание двигателей (14) и бортовых систем осуществляется от АКБ (20).
РП управляется через модуль радиоканала (7) в режимах:
Ручном дистанционном;
Полуавтоматическом;
Автоматическом по программе одиночное и групповое до 16 РПСН одновременно.
Имеет навигационную и инерционные бортовые системы (4). Для размещения полезной нагрузки РП имеет грузовой отсек (23), в котором располагается встроенное и навесное оборудование для мишенной установки, подсветки целей, тепловизорное оборудование и вооружение, включающее в себя тяжелое стрелковое вооружение и другое оборудование, и вооружение, предназначенное для решения поставленных задач (на чертежах не показаны). Грузовой отсек открыт с верхней стороны и имеет бронирование по боковому периметру
Также РП имеет закрытое бронированное моторно-трансмиссионное отделение (24), в котором размещены энергетическая установка (5), приводная станция (2), система автоматического управления, интегральная шина (типа CAN) (6). РП предназначено для использования в составе роботизированных модульных комплектов автономного полигонного оборудования для стрелкового оружия и одиночном использовании.
РП обеспечивает реализацию следующих функций:
- транспортировку с мишенью при выполнении упражнений как в режиме непосредственного управления с пульта, так и по заранее составленным программам упражнений в автоматическом режиме;
- прием и обработку сигналов команд управления, поступающих от приемопередатчика, их выполнение и формирование ответных сигналов;
- двустороннюю трансляцию получаемых либо запрограммированных команд и телеметрической информации (такую как фиксирование попадания в цель с дифференциацией зон поражения ("ранил"/"убил"), накопление и передачу информации о попаданиях на пульт управления, опускание мишени при попадании пули в зону поражения с выдачей этой информации на пульт управления, подъем/опускание мишени по командам с пульта управления);
- двустороннюю трансляцию получаемых либо запрограммированных команд и телеметрической информации управления тяжелого стрелкового вооружения;
- передачу информации о текущем местоположении ИУП, скорости движения, состоянии аккумуляторных батарей;
- время подготовки к работе - не более 2 часов.
Несущая рама (1) обеспечивает крепление внутренних узлов и агрегатов РП (приводной станции (2), системы автоматического управления (6), перегородки (25) моторно-технического отделения (24), а также полезной нагрузки. В состав РП входит съемный подрамник (9), находящийся в грузовом отсеке (23), который позволяет надежно закрепить в необходимом положении мишенную установку или иной груз внутри отсека.
Приводная станция (2) состоит из двух приводов (10), элементов их крепления и ведущих звездочек (13) левой и правой гусениц (4). Каждый привод (10) состоит из бесколлекторного электродвигателя (14) постоянного тока, двухступенчатого редуктора (11) и выходного вала (12).
Ходовая часть РП состоит из двух гусеничных движителей (26). Каждый движитель (26) оснащен тремя сдвоенными опорными роликами (16), двумя поддерживающими роликами (17) и расположенном впереди по ходу движения узлом натяжителя (18) со звездочкой (13). Все элементы движителя закреплены на раме (15) гусеницы. Рама (15) гусеницы крепится к опорным консолям корпуса посредством скоб (19). Опорные ролики (16) выполнены из резины, что обеспечивает достаточный уровень внутренней амортизации. Гусеницы (4) резиновые, армированные, снабжены грунтозацепами и имеют внутренние поперечные элементы жесткости из высокопрочного стеклопластикового композитного материала (на чертеже не показаны).
Энергетическая установка (5) РП обеспечивает автономное электропитание от аккумуляторных батарей двух типов один для привода, а второй для автоматического управления.
Система обеспечивает ручное, автоматизированное и автоматическое управление представляет собой комплекс программно-аппаратных средств – обмен информацией между которыми происходит по интегральной шине (типа CAN), но построенной для обеспечения управления платформой на гусеничном ходу и состоит из следующих подсистем, датчиков и модулей (на чертежах не показана):
Основной модуль;
- Модуль GPS, ГЛОНАСС с приемной антенной;
- Контроллеры бесколлекторных электродвигателей;
- Коммутационно-распределительной аппаратуры и соединительных кабелей и жгутов.
A) Модуль связи и передачи данных;
- радиомодем;
- антенна.
Б) Подсистема навигации и ориентации, включающая
- модуль инерциальной навигации;
- модуль глобальной навигации, поддерживающий работу с навигационными системами GPS, ГЛОНАСС.
B) Подсистема управления движением
- одометрический датчик на контроллере управления двигателями;
- вычислительное устройство;
- специальное программно-математическое обеспечение;
- модуль управления движением.
Г) Подсистемы управления целевой нагрузкой (роботизированной анатомической мишенью, боевыми модулями).
Система управления, построенная на интегральной шине (типа CAN) (6), позволяет осуществлять управление движением РПСН, а также осуществлять прозрачную передачу команд и телеметрической информации с использованием одного радиоканала.
Система управления, построенная на интегральной шине (типа CAN) (6), может функционировать в следующих режимах:
- Непосредственное управление с пульта с помощью клавиатуры и/или джойстика;
- Выполнение заранее запрограммированной последовательности действий и движений. Программирование осуществляется с пульта полевого управления полигонным оборудованием.
Установка режимов производится дистанционно с пульта управления по линии радиосвязи.
Система управления, построенная на интегральной шине (типа CAN), обеспечивает передачу следующей телеметрической информации на пульте:
- Выполнение программного задания;
- Местоположение (по данным спутниковой навигационной);
- Скорость перемещения;
- Напряжение АКБ;
- Передачу данных от мишенной установки.
Бронекорпус (8) предназначен для защиты внутренних устройств и полезной нагрузки от воздействия стрелкового оружия. Бронекорпус (8) выполнен сварным, из высококачественной бронестали. Бронекорпус снабжен верней крышкой отсека моторно-технического отсека и капотом, позволяющим осуществлять доступ для обслуживания и ремонта внутренних устройств РП. Бронекорпус снабжен проушинами.
Первичным назначением РП является модульная универсальная установка предъявления появляющихся объемных имитаторов целей.
Позиции
1. несущая рама
2. приводная станция
4. гусеница
5. энергетическая установка
6. система автоматического управления – интегральная шина типа CAN
7. модуль радиоканала
8. бронекорпус
9. подрамник
10. привод
11. двухступенчатый редуктор
12. выходной вал
13. ведущая звездочка
14. бесколлекторный электрический двигатель
15. рама гусеницы
16. сдвоенный опорный ролик
17. поддерживающий ролик
18. узел натяжителя
19. скоба
20. аккумуляторная батарея
21. модульная универсальная установка предъявления перемещающейся цели.
22. грузовой отсек
23. моторно-трансмиссионное отделение
24. перегородка
25. гусеничный движитель
| название | год | авторы | номер документа |
|---|---|---|---|
| РОБОТИЗИРОВАННАЯ, АНАТОМИЧЕСКОЙ ФОРМЫ МИШЕНЬ | 2015 |
|
RU2595558C1 |
| Роботизированный мишенный комплекс для тренировки тактики боя в условиях полигона | 2021 |
|
RU2770713C1 |
| ИСПОЛНИТЕЛЬНОЕ УСТРОЙСТВО ПЕРЕМЕЩЕНИЯ | 2017 |
|
RU2643059C1 |
| РОБОТИЗИРОВАННЫЙ МОДУЛЬНЫЙ КОМПЛЕКС АВТОНОМНОГО ПОЛИГОННОГО ОБОРУДОВАНИЯ | 2017 |
|
RU2667132C1 |
| Наземный роботизированный комплекс | 2023 |
|
RU2819223C1 |
| СПОСОБ ОБУЧЕНИЯ ПРОИЗВОДСТВУ СТРЕЛЬБЫ ИЗ СТРЕЛКОВОГО ОРУЖИЯ И КОМПЛЕКС УЧЕБНЫХ МЕСТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2213319C1 |
| БОЕВАЯ МАШИНА ДЕСАНТА | 2001 |
|
RU2223460C2 |
| СТРЕЛКОВЫЙ ТРЕНИРОВОЧНЫЙ КОМПЛЕКС | 2013 |
|
RU2530464C1 |
| УНИФИЦИРОВАННОЕ НИЗКОСИЛУЭТНОЕ ШАССИ ДЛЯ ВОЕННЫХ ГУСЕНИЧНЫХ МАШИН (ВАРИАНТЫ) | 2009 |
|
RU2399856C1 |
| УДАРНАЯ МАШИНА ПЕХОТЫ (ВАРИАНТЫ) | 2008 |
|
RU2404399C2 |
Изобретение относится к оборудованию стрелковых тиров, военных полигонов или как роботизированная платформа в составе перспективных охранных или тактических роботизированных разведывательно-боевых комплексах. Роботизированная платформа (РП) состоит из корпуса, привода и устройства управления. РП является транспортным средством с гусеничным движителем с приводом от бесколлекторных электродвигателей постоянного тока. РП управляется по радиоканалу в режимах: ручном дистанционном, полуавтоматическом, автоматическом по программе. РП также содержит навигационную и инерционные бортовые системы, закрытое бронированное моторно-трансмиссионный отделение. Внутри корпуса несущая рама обеспечивает крепление внутренних узлов и агрегатов РП. Привод РП содержит элементы крепления и ведущие звездочки левой и правой гусениц. Ходовая часть РП состоит из двух гусеничных движителей. Каждый движитель оснащен тремя сдвоенными опорными роликами из резины, двумя поддерживающими роликами и расположенном впереди по ходу движения узлом натяжителя со звездочкой, резиновыми гусеницами с грунтозацепами, а все элементы движителя закреплены на раме гусеницы. Рама крепится к опорным консолям корпуса посредством скоб. Достигается возможность перемещения мишени. 4 ил.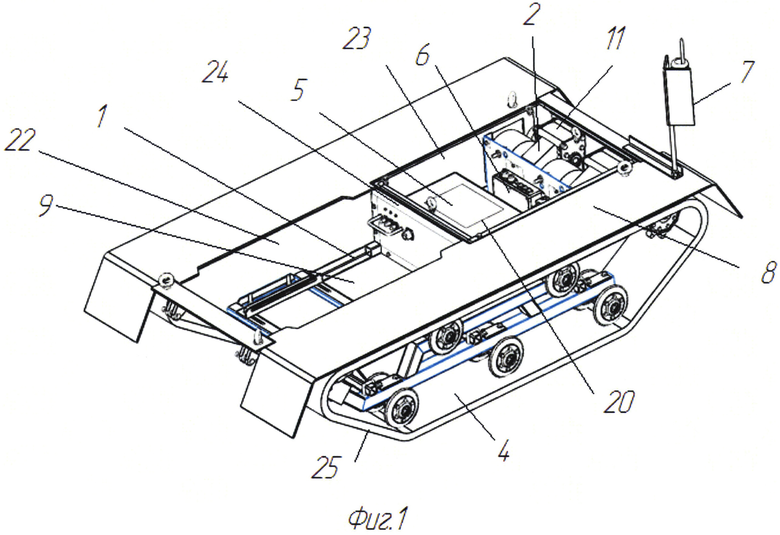
Роботизированная платформа (РП), состоящая из корпуса, привода, устройства управления, отличающаяся тем, что является транспортным средством с гусеничным движителем с приводом от бесколлекторных электродвигателей постоянного тока, причем электропитание двигателей и бортовых систем осуществляется от аккумуляторных батарей, и управляется по радиоканалу в режимах: ручном дистанционном, полуавтоматическом, автоматическом по программе одиночное и групповое до 16 РП одновременно, и имеет навигационную и инерционные бортовые системы, а также имеет грузовой отсек с бронированием по боковому периметру, а также РП имеет закрытое бронированное моторно-трансмиссионное отделение, в котором размещены энергетическая установка, приводная станция, система управления - интегральная шина типа CAN, а внутри корпуса несущая рама обеспечивает крепление внутренних узлов и агрегатов РП, а именно приводной станции, системы автоматического управления, перегородки моторно-трансмиссионного отделения, а также полезной нагрузки, и в состав РП входит съемный подрамник, расположенный в грузовом отсеке, причем приводная станция РП состоит из двух приводов, элементов их крепления и ведущих звездочек левой и правой гусениц и каждый привод состоит из бесколлекторного электродвигателя постоянного тока, двухступенчатого редуктора и выходного вала, а ходовая часть РП состоит из двух гусеничных движителей, и каждый движитель оснащен тремя сдвоенными опорными роликами из резины, двумя поддерживающими роликами и расположенным впереди по ходу движения узлом натяжителя со звездочкой, а все элементы движителя закреплены на раме гусеницы, а рама гусеницы крепится к опорным консолям корпуса посредством скоб.
| САМОДВИЖУЩАЯСЯ ПЛАТФОРМА РОБОТОТЕХНИЧЕСКОГО КОМПЛЕКСА | 2015 |
|
RU2583254C1 |
| Предварительно напряженный железобетонный элемент | 1949 |
|
SU85224A1 |
| СИСТЕМА УПРАВЛЕНИЯ БОЕВОЙ РОБОТИЗИРОВАННОЙ ПЛАТФОРМОЙ | 2013 |
|
RU2544740C1 |
| СПОСОБ УПРАВЛЕНИЯ СИЛОВОЙ УСТАНОВКОЙ ВЕРТОЛЕТА | 2010 |
|
RU2482024C2 |
| US 2009281660 A1, 12.11.2009 | |||
| СПОСОБ РЕМОНТА ВНЕШНЕЙ ОБШИВКИ КОМПОЗИТНОЙ КОНСТРУКЦИИ | 2006 |
|
RU2412815C2 |

