Изобретение относится к комплексам автономного полигонного оборудования для оснащения учебных объектов тактической и огневой подготовки воинских частей и центров подготовки, а также для оперативного развертывания на местности при проведении боевого слаживания подразделений.
Известна система подготовки сценариев и обучению стрельбе (WO 2013/123547 А1, (D1), Кл. F41J 9/02, 29.08.2013), принятая за прототип. Известны признаки роботизированного модульного комплекса автономного полигонного оборудования, содержащего устройство отображения и пульт управления, выполненный в виде формирователя команд управления и запросов состояния мишенной установки, приемника данных о полученном состоянии, управляемую мишенную установку, закрепленную на платформе, на которой размещены приемопередатчик с антенно-фидерным устройством, электронный блок управления, при этом, роботизированный комплекс автономного полигонного оборудования выполнен с возможностью имитации приемов тактических действий подразделений противника посредством создания и динамического изменения различной мишенной обстановки - сценариев предъявления одиночных и групповых, появляющихся и движущихся целей в зависимости от эффективности стрельбы и действий обучаемых подразделений и отдельных военнослужащих, и функционально реализован по модульному принципу для чего включает в свой состав: модуль управления полигонным оборудованием - МУПО, модульную установку предъявления появляющейся цели - МУПЦ, сателлит модульной установки предъявления появляющейся цели - СМУПЦ, модульную универсальную установку предъявления перемещающейся цели - МУУПЦ, МУПО выполнен в виде автоматизированного рабочего места, предназначенного для ручного и автоматического управления МУПЦ и МУУПЦ, дистанционного тестирования составных частей, отображения положения мишени, обработки информации о состоянии мишенного оборудования, результатах огневого поражения мишеней, отображения данных на мониторе АРМ, формирования групповых целей и сценария показа мишени, управления мишенным оборудованием в автоматическом режиме согласно сформированному сценарию, МУПЦ выполнен в виде устройства, предназначенного для установки мишени, регистрации попаданий в зоны поражения мишений и передачи этой информации в МУПО, а также для передачи управления СМУПЦ при поражении зон ранения на МУПЦ, СМУПЦ выполнен в виде устройства, предназначенного для установки на ней мишени, регистрации попадания пуль в зоны поражения мишеней и передачу этой информации на МУПО, МУУПЦ реализован на базе исполнительного устройства перемещения - ИУП, на котором установлен МУПЦ, и выполнен с возможностью имитации движущейся цели при проведении стрельб из стрелкового оружия, ИУП выполнен в виде автономного дистанционно-управляемого транспортного средства, реализованного с возможностью транспортирования МУПЦ при выполнении стрелковых упражнений в ручном или автоматическом режиме, двусторонней трансляции задаваемых, либо запрограммированных команд и телеметрической информации в/из МУПЦ таких, как, передачи информации о текущем местоположении ИУП.
Недостатками прототипа являются:
- недостаточная степень автоматизации процесса проведения работ при выполнении задач по назначению во время проведения стрельб;
- отсутствие возможности оперативной имитации различных приемов тактических действий мелких подразделений противника с помощью создания и динамичного изменения различной мишенной обстановки;
- ограниченные возможности по использованию в составе радиоуправляемого стрельбищного оборудования.
Предлагаемым изобретением решается задача по повышению степени имитационных возможностей, автономности и мобильности автоматизированных мишенных комплексов для стрелкового оружия при их развертывании и использовании по назначению.
Технический результат, получаемый при осуществлении изобретения, заключается в создании роботизированного модульного комплекса автономного полигонного оборудования, обеспечивающего автономное транспортирование автоматизированного мишенного комплекса при выполнении стрелковых упражнений как в режиме непосредственного ручного управления, так и по заранее составленному программному алгоритму выполнения упражнений в автоматическом режиме, прием и обработку сигналов команд управления, их выполнение и формирование ответных сигналов, двустороннюю трансляцию получаемых либо запрограммированных команд и телеметрической информации о попадания в цель с дифференциацией зон поражения («ранил»/«убил»), накопление и передачу информации о попаданиях, опускание мишени при попадании пули в зону поражения с выдачей этой информации на пульт управления, подъем/опускание мишени по командам с пульта управления, передачу информации о текущем местоположении исполнительного устройства перемещения.
Указанный технический результат достигается тем, что в предлагаемом роботизированном модульном комплексе автономного полигонного оборудования, содержащем устройство отображения и пульт управления, выполненный в виде формирователя команд управления и запросов состояния мишенной установки, приемника данных о полученном состоянии, управляемую мишенную установку, закрепленную на платформе, на которой размещены приемопередатчик с антенно-фидерным устройством, электронный блок управления и подъемный механизм мишени, НОВЫМ является то, что роботизированный комплекс автономного полигонного оборудования выполнен с возможностью имитации приемов тактических действий подразделений противника посредством создания и динамического изменения различной мишенной обстановки - сценариев предъявления одиночных/групповых появляющихся и движущихся целей, в зависимости от эффективности стрельбы и действий обучаемых подразделений и отдельных военнослужащих, и функционально реализован по модульному принципу для чего включает в свой состав: модуль управления полигонным оборудованием (МУПО), модульную установку предъявления появляющейся цели (МУПЦ), сателлит модульной установки предъявления появляющейся цели (СМУПЦ), модульную универсальную установку предъявления перемещающейся цели (МУУПЦ), МУПО выполнен в виде автоматизированного рабочего места, предназначенного для ручного и автоматического управления МУПЦ и МУУПЦ, дистанционного тестирования составных частей, отображения положения мишени, обработки информации о состоянии мишенного оборудования, результатах огневого поражения мишеней, отображения данных на мониторе АРМ, формирования групповых целей и сценария показа мишени, управления мишенным оборудованием в автоматическом режиме согласно сформированному сценарию, (МУПЦ) выполнен в виде устройства, предназначенного для установки мишени, ее подъема/опускания, регистрации попаданий в зоны поражения мишеней и передачи этой информации в МУПО, а также для передачи управления СМУПЦ при поражении зон ранения на МУПЦ, СМУПЦ выполнен в виде устройства, предназначенного для установки на ней мишени, ее подъема/опускания, регистрации попадания пуль в зоны поражения мишеней и передачу этой информации на МУПО, МУУПЦ реализован на базе исполнительного устройства перемещения (ИУП), на котором установлен МУПЦ, и выполнен с возможностью имитации движущейся цели при проведении стрельб из стрелкового оружия, ИУП выполнен в виде автономного дистанционно-управляемого транспортного средства с гусеничным движителем, реализованного с возможностью транспортирования МУПЦ при выполнении стрелковых упражнений в ручном или автоматическом режиме, двусторонней трансляции задаваемых, либо запрограммированных команд и телеметрической информации в/из МУПЦ таких, как фиксирование попадания в цель с дифференциацией зон поражения, опускание мишени при попадании пули в зону поражения, передачи информации о текущем местоположении ИУП.
Выполнение роботизированного комплекса автономного полигонного оборудования с возможностью имитации приемов тактических действий подразделений противника посредством создания и динамичного изменения различной мишенной обстановки позволяет:
- повысить эффективность стрелковой подготовки личного состава подразделений Сухопутных войск, войск специального назначения;
- оперативно моделировать различные сценарии предъявления одиночных/групповых, появляющихся и движущихся целей;
- качественно оценить результаты стрельбы и действий обучаемых подразделений и отдельных военнослужащих;
- повысить технический уровень полигонного оборудования;
- обеспечить быстрое развертывание центров стрелковой подготовки при максимальном использовании преимуществ реальной рельефной обстановки.
Функциональная реализация РМКАПО по модульному принципу позволяет:
- повысить степень универсализации полигонного оборудования и программного обеспечения при выполнении РМКАПО задач по назначению;
- обеспечить высокий уровень взаимозаменяемости и ремонтопригодности оборудования;
- обеспечить наращивание функциональных и вычислительных возможностей технических средств и программного обеспечения РМКАПО.
Включение в состав РМКАПО модуля управления полигонным оборудованием, модульной установки предъявления появляющейся цели, сателлита модульной установки предъявления появляющейся цели, модульной универсальной установки предъявления перемещающейся цели позволяет:
- обеспечить ручное и автоматизированное управление МУПЦ с СМУПЦ и МУУПЦ, развернутыми на подготовленной в инженерном отношении местности, а также сбор информации об их состоянии по беспроводному каналу связи;
- обеспечить показ легких и средних мишеней при обучении личного состава войсковых подразделений стрельбе по появляющимся целям и выдачу результатов стрельбы на командный пункт руководителя стрельбы в составе радиоуправляемого переносного стрельбищного оборудования;
- транспортирование МУПЦ с мишенью при выполнении упражнений как в режиме непосредственного управления с пульта, так и по заранее составленным программам упражнений в автоматическом режиме.
Выполнение МУПО в виде автоматизированного рабочего места позволяет:
- обеспечить двухуровневое управление исполнительными устройствами роботизированного комплекса автономного полигонного оборудования;
- обеспечить дистанционное централизованное тестирование технического состояния составных частей комплекса;
- обеспечить получение информации о положении мишени, результатах огневого поражения мишеней;
- обеспечить формирование групповых целей и сценария показа мишени, реализацию данного сценария в автоматическом режиме.
Выполнение МУПЦ в виде устройства, предназначенного для установки мишени, ее подъема/опускания, регистрации попаданий и передачи этой информации на МУПО позволяет:
- реализовать показ легких и средних мишеней при обучении войсковых подразделений стрельбе по появляющимся целям и выдачи результатов стрельбы на командный пункт для руководителя стрельбы;
- передавать команды управления на СМУПЦ при поражении мишени на МУПЦ.
Выполнение СМУПЦ в виде устройства, предназначенного для установки на ней мишени, ее подъема/опускания, регистрации попаданий и передачи этой информации на МУПО позволяет:
- использовать СМУПЦ в качестве дублирующей мишени;
- облегчить формирование сценариев создания мишенной обстановки.
Реализация МУУПЦ на базе исполнительного устройства перемещения (ИУП), на котором установлен МУПЦ, позволяет:
- обеспечить транспортировку и предъявление мишеней в условиях полигона при обучении личного состава стрельбе по перемещающимся целям;
- обеспечить управление движением ИУП и функционированием МУПЦ;
- обеспечить передачу информации о текущем местоположении ИУП и скорости движения.
Выполнение ИУП в виде автономного дистанционно-управляемого транспортного средства с гусеничным движителем позволяет:
- обеспечить высокую проходимость ИУП в условиях пересеченной местности полигона;
- обеспечить автономность и мобильность мишенного комплекса;
- обеспечить реализацию сценариев создания мишенной обстановки.
Технические решения с признаками, отличающими заявляемое решение от прототипа, не известны и явным образом из уровня техники не следуют. Это позволяет считать, что заявляемое решение является новым и обладает изобретательским уровнем.
Сущность изобретения поясняется чертежом, где показана структурная схема роботизированного модульного комплекса автономного полигонного оборудования (РМКАПО).
Роботизированный модульный комплекс автономного полигонного оборудования (РМКАПО) 1 содержит модуль управления полигонным оборудованием (МУПО) 2, модульную установку предъявления появляющейся цели (МУПЦ) 3, сателлит модульной установки предъявления появляющейся цели (СМУПЦ) 4, модульную универсальную установку предъявления перемещающейся цели (МУУПЦ) 5. МУПО 2 состоит из комплекта программно-аппаратных средств управления в составе: операционной системы (ОС) 6, специального программного обеспечения (СПО) 7 и персонального компьютера (ПК) 8, базового модуля приема/передачи команд и эксплуатационной информации (БМПП) 9. МУПЦ 3 состоит из следующих основных узлов: исполнительного устройства предъявления мишени (ИУПМ) 10, абонентского модуля приема/передачи команд и эксплуатационной информации (АМПП) 11, блока управления (БУ) 12. СМУПЦ 4 состоит из следующих основных узлов: исполнительного устройства предъявления мишени (ИУПМ) 13, блока управления (БУ) 14.
МУУПЦ 5 состоит из следующих основных узлов: исполнительного устройства перемещения (ИУП) 15 цели на местности - участку ее предъявления, абонентского модуля приема/передачи команд и эксплуатационной информации (АМПП) 16, системы автоматического управления (САУ) 17, оснащенной аппаратурой спутниковой навигации (АСН) 18, МУУПЦ 5.
Роботизированный модульный комплекс автономного полигонного оборудования (РМКАПО) 1 функционирует следующим образом. РМКАПО 1 развертывается на учебных объектах тактической и огневой подготовки воинских частей и центров подготовки и на различной неподготовленной местности при проведении боевого слаживания подразделений. РМКАПО 1 предназначен для имитации различных приемов тактических действий мелких подразделений противника с помощью создания и динамичного изменения различной мишенной обстановки - сценариев предъявления одиночных и групповых, появляющихся и движущихся целей в зависимости от меткости стрельбы и действий обучаемых подразделений и отдельных военнослужащих.
РМКАПО 1 обеспечивает автоматизированное функционирование полигонного оборудования, автоматизированный съем данных о результатах стрельб и передачу их руководителю стрельбы.
МУПО 2 в виде автоматизированного рабочего места обеспечивает ручное и автоматическое управление МУПЦ 3 с СМУПЦ 4 и МУУПЦ 5, дистанционное тестирование составных частей (исправно-не исправно), отображение положений мишени - «поднята/опущена», обработку информации о состоянии мишенного оборудования, результатах огневого поражения мишеней с учетом зон поражения, формирование групповых целей с возможностью определения поражения каждой мишени, формирование сценария показа мишени, хранение его в электронной памяти, управление мишенным оборудованием в автоматическом режиме согласно заранее сформированному сценарию, а также в ручном режиме управления с возможностью показа мишенной обстановки по отдельным рубежам и отдельным целям. БМПП 9 обеспечивает устойчивую радиосвязь мишенного оборудования с автоматизированным рабочим местом МУПО 2 на дальности до 1 км. ПК 8 с ОС 6 функционирует в соответствии с установленным СПО 7.
МУПЦ 3 предназначен для установки на ней одной мишени, ее подъема/опускания при поступлении сигнала управления с МУПО 2 по беспроводному каналу связи (время подъема или опускания - не более 2 сек), регистрации попаданий пуль в зоны поражения мишеней и передачу этой информации по радиоканалу на МУПО 2. При поражении зон ранения на мишени МУПЦ 3 реализуется возможность передачи управления СМУПЦ 4. Для приближения условий к боевым МУПЦ 3 в ночное (темное) время суток обеспечивает световую имитацию ведения огня противником в одиночном и автоматическом режимах. МУПЦ 3 при совместном использовании с СМУПЦ 4 регистрируют поражение собственной мишени после ее полного подъема и результаты попадания в мишень СМУПЦ 4. При поражении мишени МУПЦ 3 БУ 12 обеспечивает следующие режимы работы: при попадании пули в зону поражении - «убил» повторного подъема мишени МУПЦ 3 и мишени СМУПЦ 4 не производится, при попадании пули в зону поражения - «ранение» на мишени МУПЦ 3 происходит опускание мишени и поднимается мишень СМУПЦ 4.
СМУПЦ 4 предназначен для установки на ней одной мишени, ее подъема/опускания при поступлении сигнала управления с МУПО 2 (время подъема или опускания - не более 2 с), регистрации попадания пуль в зоны поражения мишеней и передачу этой информации на МУПО 2. СМУПЦ 4 в ночное (темное) время суток обеспечивает световую имитацию ведения огня противником в одиночном и автоматическом режимах.
МУУПЦ 5 перемещается по подготовленной в инженерном отношении пересеченной местности и предназначен для имитации движущейся группы пехоты противника, а также иных целей (по выбору) при проведении практических стрельб из стрелкового оружия.
На ИУП 15 МУУПЦ 5 устанавливается МУПЦ 3. Скорость движения ИУП 15 варьируется от 0 до 12 км/ч. Управление ИУП 15, изменение скорости его движения осуществляется с автоматизированного рабочего места МУПО 2 по беспроводному каналу связи. Транспортирование МУПЦ 3 с мишенью при выполнении упражнений осуществляется как в режиме непосредственного ручного управления, так и по заранее составленным программам упражнений в автоматическом режиме. Во время выполнения задач по назначению происходит двусторонняя трансляция получаемых либо запрограммированных команд и телеметрической информации в/из МУПЦ 3 (фиксирование попадания в цель с дифференциацией зон поражения («ранил»/«убил»)), накопление и передача информации о попаданиях руководителю стрельбы, опускание мишени при попадании пули в зону поражения с выдачей этой информации на МУПО 2, подъем/опускание мишени по командам с МУПО 2. При этом МУУПЦ 5 осуществляет по сигналам АСН 18 передачу информации о текущем местоположении ИУП 15, а также - информации о скорости движения и состоянии аккумуляторных батарей.
Таким образом, в предлагаемом изобретении решена задача по достижению технического результата, заключающегося в создании роботизированного модульного комплекса автономного полигонного оборудования, обеспечивающего автономное транспортирование автоматизированного мишенного комплекса при выполнении стрелковых упражнений как в режиме непосредственного ручного управления, так и по заранее составленному программному алгоритму выполнения упражнений в автоматическом режиме, прием и обработку сигналов команд управления, их выполнение и формирование ответных сигналов, двустороннюю трансляцию получаемых либо запрограммированных команд и телеметрической информации о попадания в цель с дифференциацией зон поражения («ранил»/«убил»), накопление и передачу информации о попаданиях, опускание мишени при попадании пули в зону поражения с выдачей этой информации на пульт управления, подъем/опускание мишени по командам с пульта управления, передачу информации о текущем местоположении исполнительного устройства перемещения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИСПОЛНИТЕЛЬНОЕ УСТРОЙСТВО ПЕРЕМЕЩЕНИЯ | 2017 |
|
RU2643059C1 |
| МОДУЛЬ УПРАВЛЕНИЯ ПОЛИГОННЫМ ОБОРУДОВАНИЕМ | 2017 |
|
RU2670395C1 |
| Роботизированный мишенный комплекс для тренировки тактики боя в условиях полигона | 2021 |
|
RU2770713C1 |
| МОДУЛЬНАЯ УСТАНОВКА ПРЕДЪЯВЛЕНИЯ ПОЯВЛЯЮЩЕЙСЯ ЦЕЛИ | 2017 |
|
RU2666465C1 |
| Роботизированная платформа специального назначения | 2016 |
|
RU2640264C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПОЯВЛЯЮЩЕЙСЯ МИШЕНЬЮ | 2013 |
|
RU2527309C1 |
| СТРЕЛКОВЫЙ ТРЕНИРОВОЧНЫЙ КОМПЛЕКС | 2013 |
|
RU2530464C1 |
| ДИСТАНЦИОННО УПРАВЛЯЕМЫЙ ПОЛИГОННЫЙ ТРЕНАЖЕР ДЛЯ СТРЕЛЬБЫ (ВАРИАНТЫ) | 2001 |
|
RU2199078C1 |
| Мишенный комплекс и способ управления им | 2019 |
|
RU2722515C1 |
| РОБОТИЗИРОВАННАЯ, АНАТОМИЧЕСКОЙ ФОРМЫ МИШЕНЬ | 2015 |
|
RU2595558C1 |

Изобретение относится к комплексам автономного полигонного оборудования для оснащения учебных объектов тактической и огневой подготовки воинских частей и центров подготовки, а также для оперативного развертывания на местности при проведении боевого слаживания подразделений. Роботизированный модульный комплекс автономного полигонного оборудования - РМКА-ПО (1) содержит модуль управления полигонным оборудованием - МУПО (2), модульную установку предъявления появляющейся цели - МУПЦ (3), сателлит модульной установки предъявления появляющейся цели - СМУПЦ (4), модульную универсальную установку предъявления перемещающейся цели - МУУПЦ (5). МУПО (2) состоит из комплекта программно-аппаратных средств управления в составе операционной системы - ОС (6), специального программного обеспечения - СПО (7) и персонального компьютера - ПК (8), базового модуля приема-передачи команд и эксплуатационной информации - БМПП (9). МУПЦ (3) состоит из исполнительного устройства предъявления мишени - ИУПМ (10), абонентского модуля приема-передачи команд и эксплуатационной информации - АМПП (11), блока управления - БУ (12). СМУПЦ (4) состоит из исполнительного устройства предъявления мишени - ИУПМ (13), блока управления - БУ (14). МУУПЦ (5) состоит из исполнительного устройства перемещения - ИУП (15) цели на местности - участку ее предъявления, абонентского модуля приема-передачи команд и эксплуатационной информации - АМПП (16), системы автоматического управления - САУ (17), МУУПЦ (5), оснащенной аппаратурой спутниковой навигации - АСН (18). Обеспечивается создание роботизированного модульного комплекса автономного полигонного оборудования автономного транспортирования автоматизированного мишенного комплекса, выполняющего стрелковые упражнения в режиме ручного управления и по заранее составленному программному алгоритму выполнения упражнений в автоматическом режиме, обрабатывающего сигналы команд управления, их выполнение, формирующего ответные сигналы, двустороннюю трансляцию получаемых либо запрограммированных команд и телеметрической информации о попадания в цель с дифференциацией зон поражения («ранил»/«убил»), накопление и передачу информации о попаданиях, опускание мишени при попадании пули в зону поражения с выдачей этой информации на пульт управления, подъем или опускание мишени по командам с пульта управления, передачу информации о текущем местоположении исполнительного устройства перемещения. 1 ил.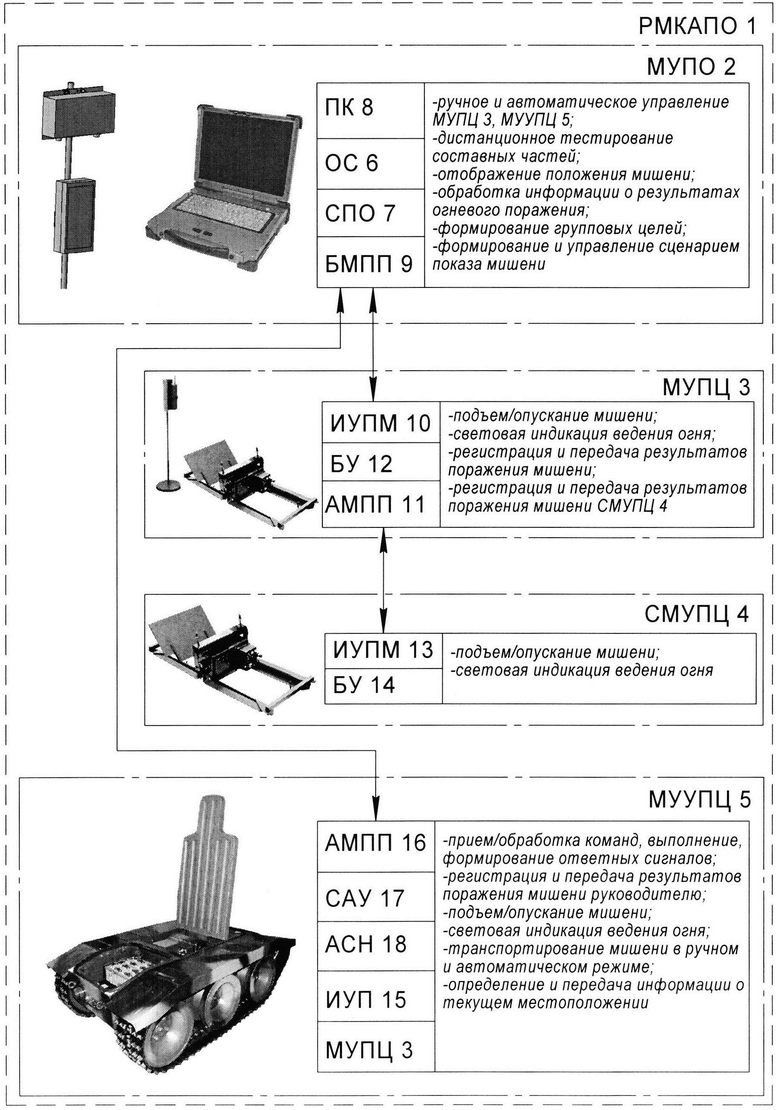
Роботизированный модульный комплекс автономного полигонного оборудования, содержащий устройство отображения и пульт управления, выполненный в виде формирователя команд управления и запросов состояния мишенной установки, приемника данных о полученном состоянии, управляемую мишенную установку, закрепленную на платформе, на которой размещены приемопередатчик с антенно-фидерным устройством, электронный блок управления и подъемный механизм мишени, отличающийся тем, что роботизированный комплекс автономного полигонного оборудования выполнен с возможностью имитации приемов тактических действий подразделений противника посредством создания и динамичного изменения различной мишенной обстановки - сценариев предъявления одиночных или групповых, появляющихся и движущихся целей в зависимости от эффективности стрельбы и действий обучаемых подразделений и отдельных военнослужащих, и функционально реализован по модульному принципу, для чего включает в свой состав модуль управления полигонным оборудованием - МУПО, модульную установку предъявления появляющейся цели - МУПЦ, сателлит модульной установки предъявления появляющейся цели - СМУПЦ, модульную универсальную установку предъявления перемещающейся цели - МУУПЦ, МУПО выполнен в виде автоматизированного рабочего места, предназначенного для ручного и автоматического управления МУПЦ и МУУПЦ, дистанционного тестирования составных частей, отображения положения мишени, обработки информации о состоянии мишенного оборудования, результатах огневого поражения мишеней, отображения данных на мониторе АРМ, формирования групповых целей и сценария показа мишени, управления мишенным оборудованием в автоматическом режиме согласно сформированному сценарию, МУПЦ выполнен в виде устройства, предназначенного для установки мишени, ее подъема или опускания, регистрации попаданий в зоны поражения мишеней и передачи этой информации в МУПО, а также для передачи управления СМУПЦ при поражении зон ранения на МУПЦ, СМУПЦ выполнен в виде устройства, предназначенного для установки на ней мишени, ее подъема или опускания, регистрации попадания пуль в зоны поражения мишеней и передачу этой информации на МУПО, МУУПЦ реализован на базе исполнительного устройства перемещения - ИУП, на котором установлен МУПЦ, и выполнен с возможностью имитации движущейся цели при проведении стрельб из стрелкового оружия, ИУП выполнен в виде автономного дистанционно-управляемого транспортного средства с гусеничным движителем, реализованного с возможностью транспортирования МУПЦ при выполнении стрелковых упражнений в ручном или автоматическом режиме, двусторонней трансляции задаваемых, либо запрограммированных команд и телеметрической информации в или из МУПЦ, таких как фиксирование попадания в цель с дифференциацией зон поражения, опускание мишени при попадании пули в зону поражения, передачи информации о текущем местоположении ИУП.
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| CN 103851962 A, 11.06.2014 | |||
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| DE 10241524 A1, 25.03.2004 | |||
| Автомобиль-сани, движущиеся на полозьях посредством устанавливающихся по высоте колес с шинами | 1924 |
|
SU2017A1 |
| Устройство к прядильным машинам для автоматического съема наработанных шпуль и надевания пустых шпуль | 1953 |
|
SU99604A1 |

