Изобретение относится к средствам спасения людей путем поднятия их вверх или оттаскивания вбок (например, из ледяной полыньи). Незаменим для быстрой эвакуации раненых бойцов и окруженных подразделений, в частности - беспилотными вертолетами. Захват может быть применен также и для высадки десанта в тех случаях, когда невозможно приземление вертолета.
Известны аналогичные средства спасения, например по заявке №2009149374.
Недостатком известных средств является сложность использования их спасаемыми людьми и сравнительно большое время одевания их. Например, одеть и застегнуть окоченевшими руками спасательный пояс человеку, находящемуся в ледяной полынье под действием мощного турбулентного воздушного потока от винта вертолета иногда бывает невозможно, особенно если человек травмирован или ранен.
Задача и технический результат изобретения - быстрое спасение, в том числе - неподготовленных, ослабленных или раненых людей.
В результате наблюдений установлено, что кистевой сустав одной руки среднего человека выдерживает его вес без заметных повреждений. Поэтому данный захват предусматривает фиксацию за запястье кисти человека с пальцами, сжатыми в кулак, с помощью двух скоб, покрытых мягким эластичным материалом.
ВАРИАНТ 1. Данный захват содержит подвижно установленную подпружиненную рукоятку, соединенную с замком, стопорящим в открытом положении два рычага или две пары рычагов со скобами для кисти руки на концах, причем рычаги крепятся к основанию одной общей осью или двумя индивидуальными осями, фиксируются относительно основания храповиками или обгонными муфтами и подпружинены в направлении взаимного сближения скоб (см. фиг. 1).
Для возможности быстрого освобождения руки спасенного человека от захвата и для возможности быстрого повторного использования захвата для спасения следующего пострадавшего храповики и обгонные муфты управляемые, то есть - отключаемые.
Сразу следует отметить, что в условиях отрицательных температур и влажности обгонные муфты будут ненадежны из-за возможности обмерзания. Поэтому их можно применять только в жарком климате и с учетом возможного намокания.
Разумеется, захват может быть сдвоенным - под обе руки человека. Однако с индивидуальным приводом на каждую руку, так как человек может схватиться за захват сначала одной рукой, затем - второй.
Возможно множество вариантов конкретного выполнения описанных конструктивных признаков изобретения. Например, подвижное крепление рукоятки может быть скользящим в Т-образных или в трубчатых направляющих, или в прорезях с помощью двух штифтов со шляпками, или на рычаге/рычагах, или на пантографном механизме, или на эластичных резиновых ромбовидных профилях, и т.п.
Замок, стопорящий в открытом положении рычаги, может быть выполнен в виде одного или двух зубьев, входящих в прорези на рычагах, или в виде штифта, входящего в рычаги, или в виде распорки между рычагами, или в виде двух рычагов, находящихся в положении неустойчивого равновесия, и т.п.
Управляемые храповики могут быть расположены на рычагах или на основании, могут иметь клавиши для их открытия, или могут быть подпружинены пружинами с положением неустойчивого равновесия с возможностью перекидываться из одного крайнего положения в другое, или могут быть соединены шнуром или тягой с возможностью открывания сразу двух или сразу четырех храповиков, или могут выводиться из зацепления с помощью поперечных клиньев, или могут выводиться из зацепления с помощью поворотных прямоугольников, и т.п.
Расположение храповиков на основании облегчает одновременное управление ими.
Управляемые обгонные муфты могут быть шариковыми, или роликовыми, или клиновыми.
Пружины, подпружинивающие рукоятку и рычаги, могут быть объемно-спиральными, работающими на растяжение, или объемно-спиральными, работающими на кручение, или плоскоспиральными, или линейными (рессорными) и т.п.
На фиг. 1, 2 упрощенно показан в разрезе первый вариант захвата.
На фиг. 3 – скобы, вид снизу.
Захват имеет рукоятку 1, закрепленную с помощью двух боковин 2 в двух Т-образных пазах на основании 3, имеющем П-образную (как на фиг. 2) или плоскую форму (в последнем случае рычагов 6 будет два, а не четыре, см. ниже). Т-образные пазы образованы отгибом пластин основания. Боковины 2 имеют сверху стопоры 4, образованные отгибом боковин. На боковинах (на отгибах) имеются два зуба 5. Боковины подпружинены в направлении вверх (пружины, например, плоскоспиральные, не показаны).
На основании 3 на общей оси закреплены четыре двуплечих рычага 6 (или два рычага, если основание будет плоским). На фиг. 2 рычаги, чтобы не загромождать чертеж, показаны фрагментарно - только части, попавшие в сечение разреза. На верхних концах рычагов имеются храповики 7 (показаны пунктиром), взаимодействующие с зубчатыми секторами 8 (направление зубьев слева и справа разное). На нижних концах пары рычагов имеются скобы 9, предназначенные для захвата кисти руки. Рычаги подпружинены в направлении сближения скоб (пружины, например, спиральные, не показаны) отдельными или попарно одной общей пружиной.
Храповики 7 подпружинены каждый скобообразной или телескопической пружиной с положением неустойчивого равновесия (не показаны) и для удобства управления имеют ушки, попарно соединенные шнуром (не показаны). Потянув за шнур в поперечном к нему направлении, можно перекинуть два храповика в устойчивое положение «открыто». Или можно просто открыть храповики руками.
Работает первый вариант захвата так: спасаемому человеку опускают захват на тросе, он хватается за рукоятку 1, слегка тянет ее на себя и зуб 5 выходит из пазов рычагов 6. Рычаги под действие пружин (не показаны) смыкаются, и скобы 9 плотно охватывают кисть руки спасаемого. При этом рычаги 6 стопорятся храповиками 7 и остаются в таком положении. Подняв спасаемого, например, в вертолет, храповики открываются спасателем, а рычаги разводятся. Так как спасаемый в это время уже отпустил рукоятку 1, то зуб 5 входит в прорези рычагов 6, и рычаги фиксируются в открытом положении. Осталось перекинуть храповики в «закрытое» положение и захват готов поднять нового человека.
ВАРИАНТ 2. Создать усилие, смыкающее рычаги со скобами можно и с помощью треугольника сил, используя вес самого спасаемого человека. Для этого можно применить упрощенный пантографный механизм с гибкими тягами.
Данный захват содержит рукоятку на жесткой тяге и два двуплечих рычага с охватывающими кисть руки скобами, причем все три эти элемента закреплены на одной оси, а верхние концы рычагов соединены гибкой тягой со спасательным тросом. Рычаги могут быть подпружинены в направлении отдаления скоб или см. ниже.
Такой механизм показан на фиг. 4, он содержит два рычага 6 со скобами 9 на нижних концах и рукоятку 1 на жесткой тяге 10. Рычаги и тяга закреплены на одной оси. Верхние концы рычагов соединены гибкими тягами 11 со спасательным тросом 12. Рычаги слегка подпружинены в направлении раскрытия (пружины не показаны).
Можно, как и на фиг. 1, 2, применить четыре двуплечих рычага, но принципиального улучшения это не даст.
Работает этот захват так: спасаемому человеку опускают захват на тросе, он хватается за рукоятку 1 и тянет ее на себя. За счет треугольника сил, возникающего на гибких тягах 11 и на верхних концах двуплечих рычагов 6, рычаги смыкаются и скобы 9 охватывают кисть руки. В дальнейшем вес спасаемого человека в основном приходится на скобы 9, и чем больше этот вес, тем сильнее смыкаются скобы 9. Усилие должно быть рассчитано и опытным путем проверено так, чтобы скобы 9 не расходились под действием веса спасаемого человека.
ВАРИАНТ 3. Вместо упрощенного пантографного механизма можно применить полноценный классический пантографный механизм. Данный захват содержит рукоятку на жесткой тяге и два двуплечих рычага с охватывающими кисть руки скобами, причем все три эти элемента закреплены на одной оси, а верхние концы рычагов соединены двумя верхними рычагами, шарнирно соединенными между собой. Рычаги могут быть подпружинены в направлении отдаления скоб, или см. ниже.
Данный захват показан на фиг. 5 и устроен так же, как захват по варианту 2 на фиг. 4, за исключением двух верхних рычагов 13, соединяющих верхние концы двуплечих рычагов 6.
Работает этот вариант так же, как вариант 2.
В таком виде этот захват принципиально не отличается от предыдущего, но он может быть несколько улучшен. Дело в том, что в этом захвате и в захвате по второму варианту рукоятка может занимать произвольное положение между рычагами и, в частности, может болтаться при опускании захвата пострадавшему. Это несколько затрудняет пострадавшему возможность ухватиться за рукоятку. Особенно это будет заметно при горизонтальном расположении захвата, например, при спасении из полыньи.
ВАРИАНТ 4. Для устранения этого недостатка захват содержит два подпружиненных двуплечих рычага с охватывающими кисть руки скобами, соединенных осью, причем верхние концы рычагов соединены двумя верхними рычагами, шарнирно соединенными между собой, и содержит рукоятку, расположенную на пластине с отверстием и с продольной прорезью, причем в отверстие входит ось двуплечих рычагов, а в прорезь входит ось, соединяющая верхние рычаги.
Рычаги могут быть подпружинены в направлении отдаления скоб, или см. ниже.
Графически этот вариант не иллюстрируется, так как мало чем отличается от варианта на фиг. 5 (вместо тяги 10 у него пластина с отверстием и с прорезью).
Работает этот вариант так же, как и варианты 2,3, но рукоятка 1 всегда остается точно посередине между двух рычагов 6.
Варианты 2,3,4 обладают двумя преимуществами по сравнению с вариантом 1. Во-первых, они проще по конструкции, а во-вторых, они очень быстро раскрываются после поднятия человека, и сразу готовы к спасению следующего пострадавшего. Но они имеют и один недостаток - при ослаблении натяжения троса захват может открыться. Чтобы этого избежать, пружина, разводящая рычаги, должна иметь положение неустойчивого равновесия.
Работает такой вариант так: при натяжении за рукоятку 1 рычаги 6 переходят из устойчивого раскрытого положения в устойчивое закрытое положение (когда скобы смыкаются). И остаются в закрытом положении даже при временном ослаблении натяжения спасательного троса. После поднятия спасаемого и после ослабления натяжения троса захват раскрывается спасателем или самим спасаемым путем отпускания рукоятки и прикладывания к рычагам 6 небольшого усилия в направлении раскрытия рычагов. При этом рычаги переходят из устойчиво закрытого положения в устойчиво открытое. Разумеется, усилие пружины не должно быть слишком большим, например, 10 кг (100 н).
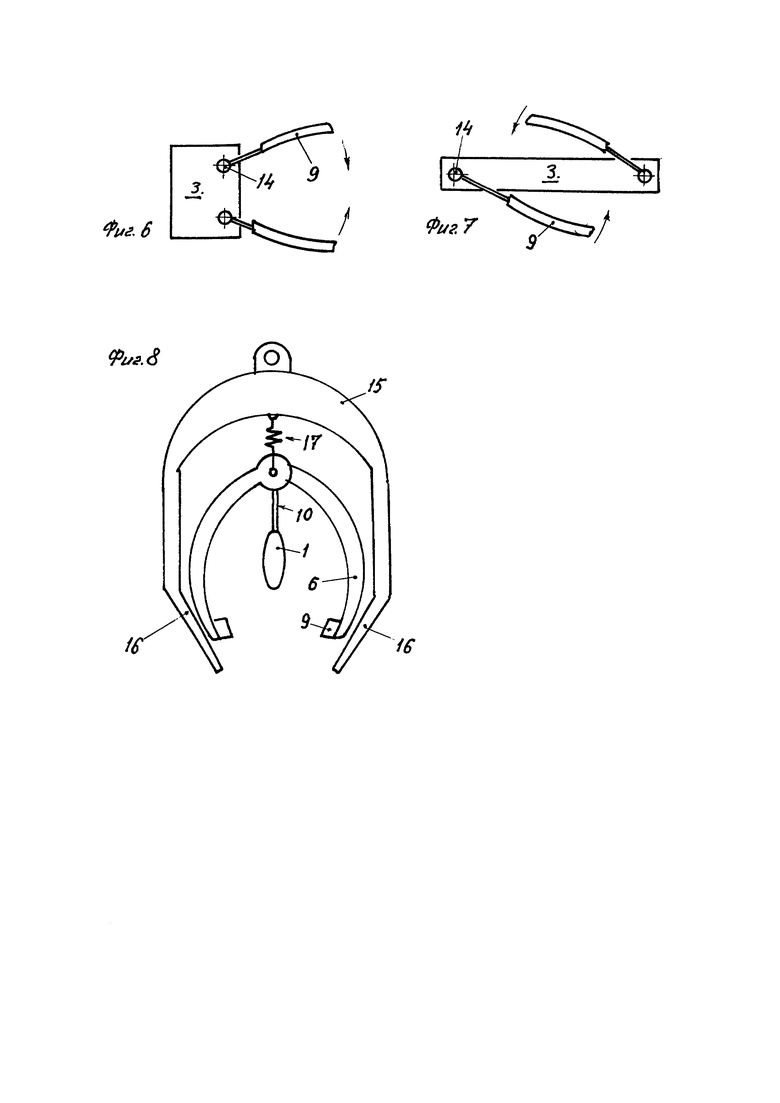
ВАРИАНТ 5. Возможна конструкция захвата, в которой скобы, охватывающие кисть руки расположены на двух вертикальных (в рабочем положении) валах. Такой захват содержит подвижно установленную подпружиненную рукоятку, соединенную с замком, стопорящим в открытом положении две охватывающих кисть руки скобы, причем скобы закреплены на одной общей или на двух индивидуальных вертикальных в рабочем положении валах, причем валы фиксируются относительно основания управляемыми храповиками или управляемыми обгонными муфтами и подпружинены в направлении взаимного сближения скоб.
Данный вариант не имеет особых преимуществ перед вышерассмотренными. Более того, его недостатком можно считать несимметричное сближение скоб и, возможно, несимметричное положение скоб на руке.
На фиг. 6, 7 упрощенно показаны два варианта кинематики данного захвата. На основании 3 закреплены два вала 14, на которых радиально расположены скобы 9 для захвата руки. Вариант на фиг. 7 несколько лучше, так как в нем скобы 9 во время перемещения остаются почти параллельными друг другу. Однако нужная ориентация запястья несколько меняется в зависимости от толщины руки.
Работает этот вариант в целом аналогично варианту 1.
ВАРИАНТ 6. Захват в этом варианте содержит рукоятку на жесткой тяге и два двуплечих рычага с охватывающими кисть руки скобами, причем все три эти элемента закреплены на одной оси, которая подпружинена вверх, причем рычаги подпружинены в направлении отдаления скоб и рычаги охватываются силовой конструкцией с двумя клиновидными направляющими, контактирующими с рычагами.
На фиг. 8 показан такой захват, где: 1 - рукоятка на жесткой тяге 10, которая крепится на одной оси с двумя рычагами 6. Рычаги имеют на нижних концах скобы 9 для зажатия кистей рук. Рычаги охватываются силовой конструкцией (в виде подковообразной скобы) 15 с двумя направляющими 16, образующими сужающийся между ними клин. Рычаги подпружинены вверх пружиной 17 и подпружинены в сторону раскрытия (эта пружина не показана).
Работает этот вариант так: человек хватается за рукоятку 1 и тянет ее вниз. Пружина 17 растягивается, рычаги 6 опускаются вниз и сближаются за счет взаимодействия с клиновидными направляющими 16. Кисть руки зажимается в скобах 9 с нужным усилием (угол клина рассчитывается и проверяется опытным путем). После подъема пострадавшего достаточно отпустить рукоятку 1 и захват приходит в исходное положение.
Следует отметить, что этот вариант имеет увеличенные габариты.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОЖАРНОЕ СПАСАТЕЛЬНОЕ УСТРОЙСТВО (ВАРИАНТЫ) | 2018 |
|
RU2680793C1 |
| Оружие с перископическим прицелом (варианты) | 2017 |
|
RU2657639C1 |
| Откатное устройство - I | 2016 |
|
RU2619628C1 |
| СПАСАТЕЛЬНОЕ СРЕДСТВО (ВАРИАНТЫ) | 2005 |
|
RU2391246C2 |
| АВТОМАТИЧЕСКОЕ ОРУЖИЕ-9 (ВАРИАНТЫ) | 2013 |
|
RU2553536C1 |
| ДИСТАНЦИОННОЕ УПРАВЛЕНИЕ СУДНОМ (ВАРИАНТЫ) | 2006 |
|
RU2329181C2 |
| АВТОМАТИЧЕСКОЕ ОРУЖИЕ- 3 /ВАРИАНТЫ/ | 2012 |
|
RU2517038C1 |
| ГРЯЗЕЗАЩИЩЕННОЕ ОРУЖИЕ (ВАРИАНТЫ) | 2013 |
|
RU2597631C2 |
| УДОБНОЕ ОРУЖИЕ /ВАРИАНТЫ/ | 2013 |
|
RU2597743C2 |
| РУЧНОЙ ЗАЖИМАЮЩИЙ ИНСТРУМЕНТ (ВАРИАНТЫ) | 2011 |
|
RU2479411C1 |

Изобретение относится к средствам спасения людей путем поднятия их вверх или оттаскивания в бок (например, из ледяной полыньи). Спасательный захват содержит несколько вариантов конструкции. В первом варианте захват содержит подвижно установленную подпружиненную рукоятку с замком, стопорящим в открытом положении два рычага или две пары рычагов со скобами на концах. Рычаги крепятся к основанию одной общей осью или двумя индивидуальными осями и фиксируются относительно основания управляемыми храповиками или обгонными муфтами и подпружинены в направлении взаимного сближения скоб. Во втором варианте захват содержит рукоятку на жесткой тяге и два двуплечих рычага с охватывающими скобами, а верхние концы рычагов соединены гибкой тягой со спасательным тросом. В третьем варианте захват имеет такую же конструкцию, как и во втором варианте, только верхние концы рычагов соединены двумя верхними рычагами, шарнирно соединенными между собой. В четвертом варианте захват содержит два подпружиненных двуплечих рычага с охватывающими скобами и рукоятку, расположенную на пластине с отверстием и с продольной прорезью. Верхние концы рычагов соединены двумя верхними рычагами. В пятом варианте захват содержит подвижно установленную подпружиненную рукоятку с замком, который стопорит в открытом положении две охватывающих скобы. Скобы закреплены на одном общем или на двух индивидуальных вертикальных валах. Валы фиксируются относительно основания, управляемыми храповиками или управляемыми обгонными муфтами и подпружинены в направлении взаимного сближения скоб. В шестом варианте захват содержит рукоятку на жесткой тяге и два двуплечих рычага с охватывающими скобами, а рычаги подпружинены в направлении отдаления скоб и охватываются силовой конструкцией с двумя клиновидными направляющими. Достигается быстрота спасения потерпевшего. 6 н. и 6 з.п. ф-лы, 8 ил.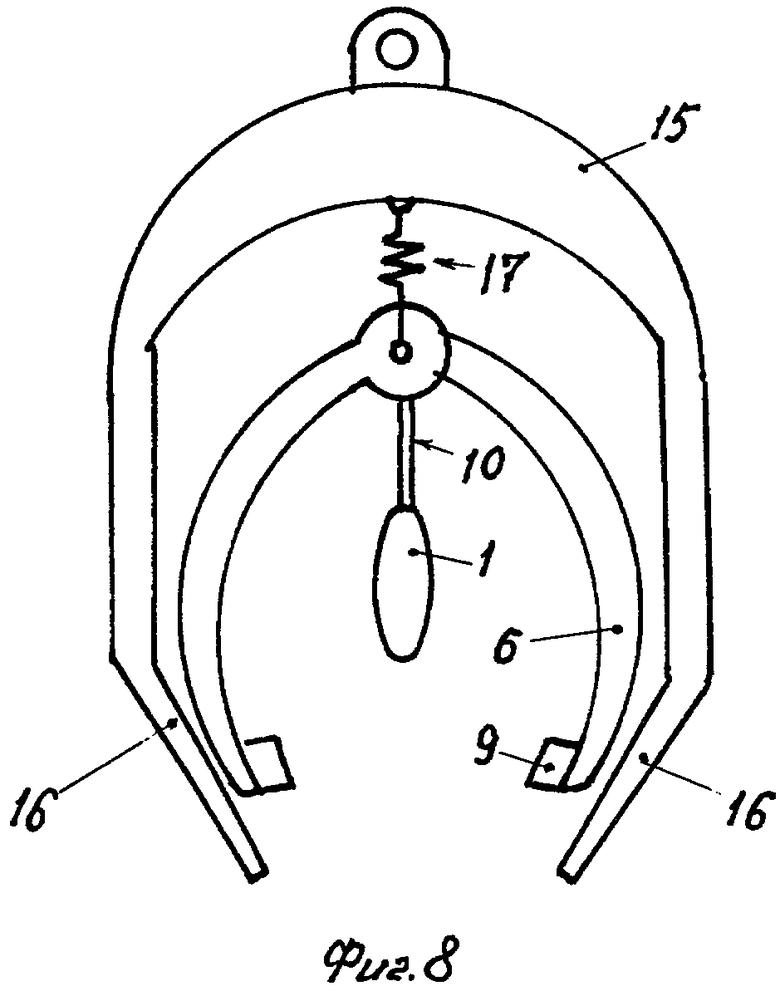
1. Спасательный захват, отличающийся тем, что содержит подвижно установленную подпружиненную рукоятку, соединенную с замком, стопорящим в открытом положении два рычага или две пары рычагов со скобами для кисти руки на концах, причем рычаги крепятся к основанию одной общей осью или двумя индивидуальными осями, фиксируются относительно основания управляемыми храповиками или управляемыми обгонными муфтами и подпружинены в направлении взаимного сближения скоб.
2. Захват по п.1, отличающийся тем, что храповики и обгонные муфты - управляемые, т.е. - отключаемые.
3. Захват по п.2, отличающийся тем, что управляемые храповики могут быть расположены на рычагах или на основании, имеют клавиши для их открытия, или подпружинены пружинами с положением неустойчивого равновесия с возможностью перекидываться из одного крайнего положения в другое, или соединены шнуром или тягой с возможностью открывания сразу двух или сразу четырех храповиков, или выводятся из зацепления с помощью поперечных клиньев, или выводятся из зацепления с помощью поворотных прямоугольников.
4. Захват по п.1, отличающийся тем, что подвижное крепление рукоятки выполнено скользящим в Т-образных или в трубчатых направляющих, или в прорезях с помощью двух штифтов со шляпками, или на рычаге/рычагах, или на пантографном механизме, или на эластичных резиновых ромбовидных профилях.
5. Захват по п.1, отличающийся тем, что замок, стопорящий в открытом положении рычаги, может быть выполнен в виде одного или двух зубьев, входящих в прорези на рычагах, или в виде штифта, входящего в рычаги, или в виде распорки между рычагами, или в виде двух рычагов, находящихся в положении неустойчивого равновесия
6. Спасательный захват, отличающийся тем, что содержит рукоятку на жесткой тяге и два двуплечих рычага с охватывающими кисть руки скобами, причем все три эти элемента закреплены на одной оси, а верхние концы рычагов соединены гибкой тягой со спасательным тросом.
7. Спасательный захват, отличающийся тем, что содержит рукоятку на жесткой тяге и два двуплечих рычага с охватывающими кисть руки скобами, причем все три эти элемента закреплены на одной оси, а верхние концы рычагов соединены двумя верхними рычагами, шарнирно соединенными между собой.
8. Спасательный захват, отличающийся тем, что содержит два подпружиненных двуплечих рычага с охватывающими кисть руки скобами, соединенных осью, причем верхние концы рычагов соединены двумя верхними рычагами, шарнирно соединенными между собой, и содержит рукоятку, расположенную на пластине с отверстием и с продольной прорезью, причем в это отверстие входит ось двуплечих рычагов, а в прорезь входит ось, соединяющая верхние рычаги.
9. Захват по п.1, отличающийся тем, что рычаги подпружинены в направлении отдаления скоб.
10. Захват по п.1, отличающийся тем, что пружина, воздействующая на рычаги, имеет положение неустойчивого равновесия и два положения устойчивого равновесия - в отдаленном и в сближенном положении скоб.
11. Спасательный захват, отличающийся тем, что содержит подвижно установленную подпружиненную рукоятку, соединенную с замком, стопорящим в открытом положении две охватывающих кисть руки скобы, причем скобы закреплены на одной общей или на двух индивидуальных вертикальных в рабочем положении валах, причем валы фиксируются относительно основания управляемыми храповиками или управляемыми обгонными муфтами и подпружинены в направлении взаимного сближения скоб.
12. Спасательный захват, отличающийся тем, что содержит рукоятку на жесткой тяге и два двуплечих рычага с охватывающими кисть руки скобами, причем все три эти элемента закреплены на одной оси, которая подпружинена вверх, причем рычаги подпружинены в направлении отдаления скоб и охватываются силовой конструкцией с двумя клиновидными направляющими, контактирующими с рычагами.
| US 6379206 B1, 30.04.2002 | |||
| Спасательное устройство | 1987 |
|
SU1497107A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| ЗАХВАТ ДЛЯ СПАСАТЕЛЬНЫХ СРЕДСТВ | 0 |
|
SU261932A1 |

