Область техники, к которой относится изобретение
Описываемые здесь варианты относятся в общем к устройству для обработки доставки и способу обработки доставки.
Уровень техники
Устройства для обработки доставки (почтовые сортировщики), используемые почтовыми службами и другими подобными организациями, осуществляют обработку, когда пункт назначения при сортировке, соответствующий региону, которому принадлежит адрес, определяют на основе адреса, который, например, написан на доставляемом объекте, и транспортируют доставляемый объект в один из нескольких приемников (приемных карманов), соответствующий пункту назначения сортировки добавляемого объекта. В этот момент, если имеются - большое число доставляемых объектов, которые должны быть доставлены в конкретный регион, может получиться, что приемник, соответствующий этому региону, окажется полон, а для решения этой проблемы известен способ, когда держат наготове резервные приемники, и временно выбирают резервный приемник в качестве пункта назначения доставляемого объекта при сортировке. Однако при использовании обычной технологии бывают ситуации, когда невозможно эффективно осуществить сортировку доставляемых объектов и укладку их в приемники.
Краткое описание чертежей
Фиг. 1 представляет схему, показывающую общий вид конфигурации устройства 1 для обработки доставки согласно первому варианту;
Фиг. 2 представляет схему, показывающую общий вид конфигурации модуля 10 предклассификационной обработки;
Фиг. 3 представляет схему, показывающую пример конфигурации приемника 30;
Фиг. 4 представляет схему, показывающую пример конфигурации устройства 1 для обработки доставки с главным контроллером 50 в центре;
Фиг. 5 представляет схему, упрощенно показывающую содержание данных, сохраняемых в качестве информации 81 состояния доставляемого объекта;
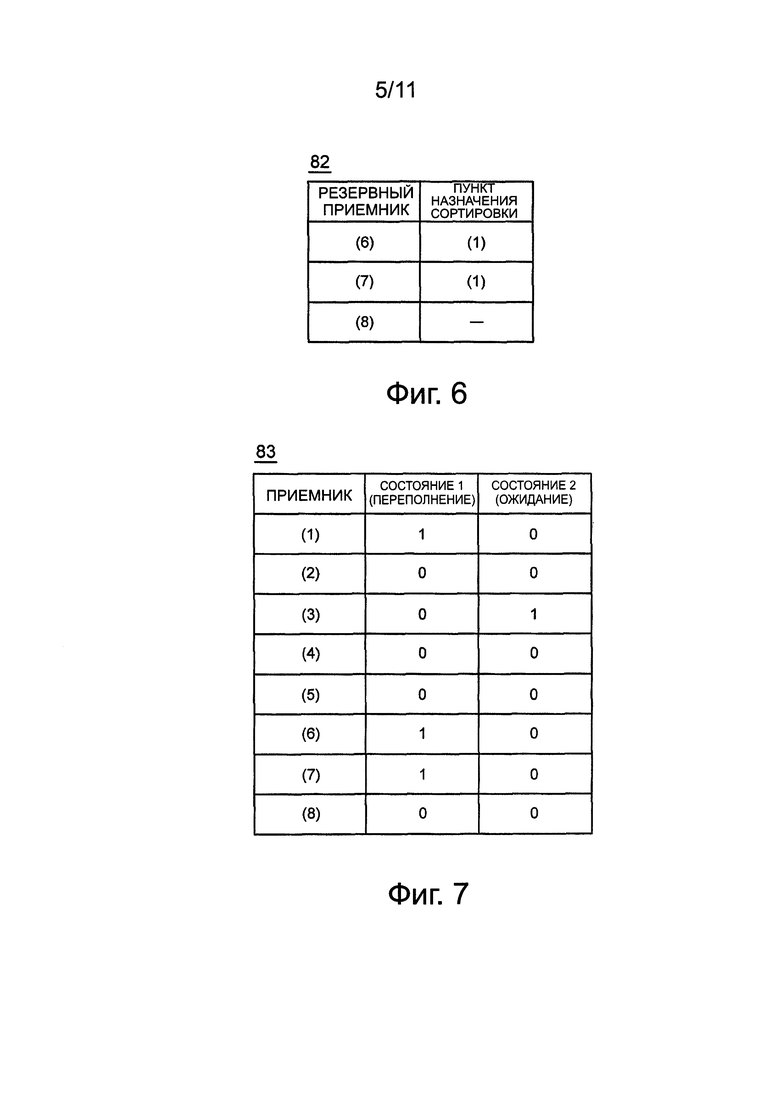
Фиг. 6 представляет схему, показывающую пример информации, сохраняемой в качестве информации 82 распределения;
Фиг. 7 представляет схему, показывающую пример информации, сохраняемой в качестве информации 83 о состоянии приемников;
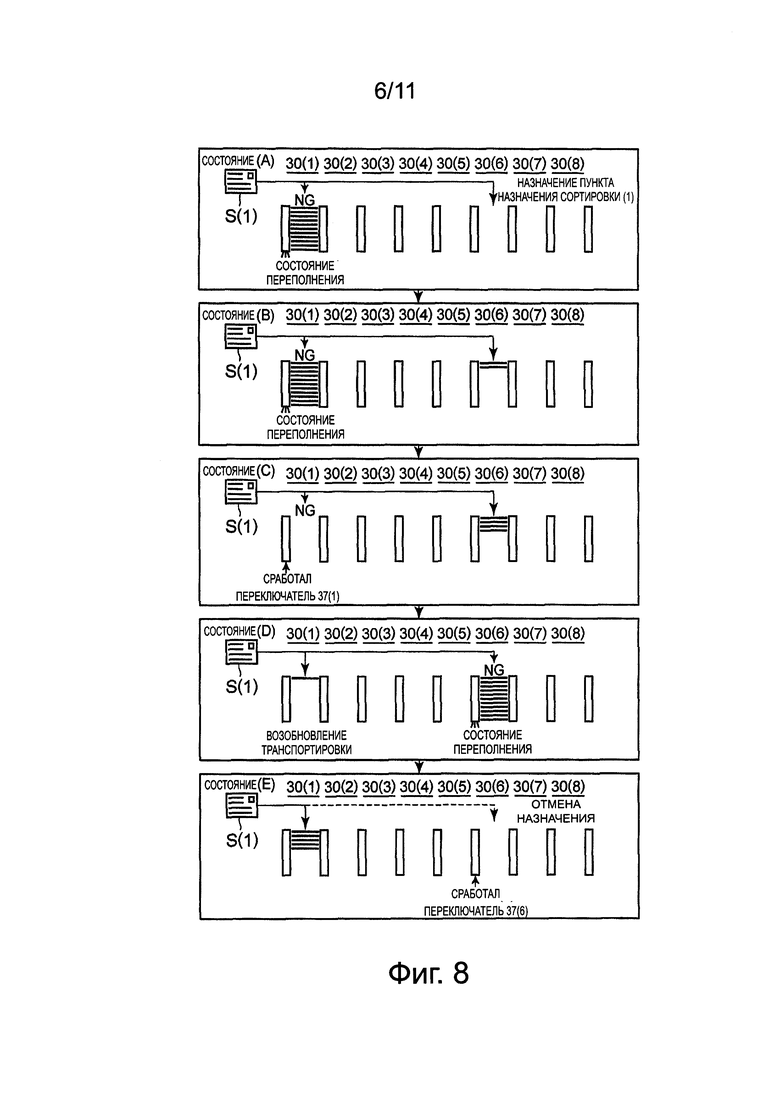
Фиг. 8 представляет схему, показывающую управление, осуществляемое модулем 54 управления транспортировкой;
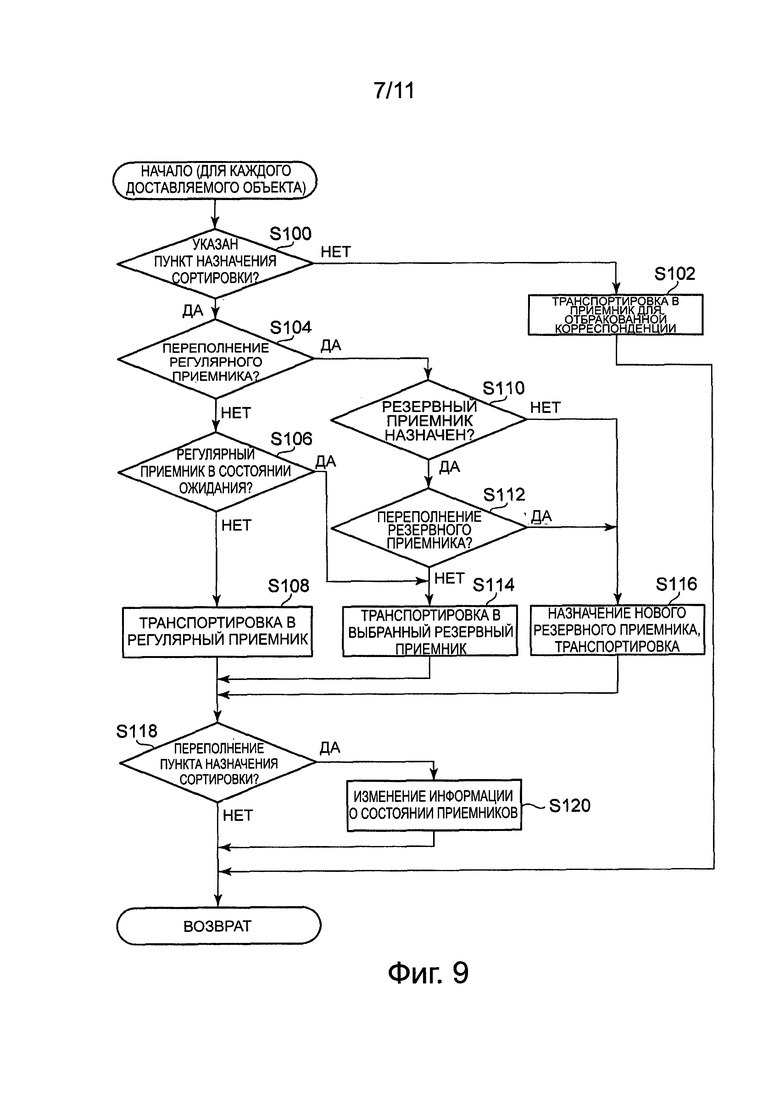
Фиг. 9 представляет логическую схему последовательности операций, выполняемых модулем 54 управления транспортировкой;
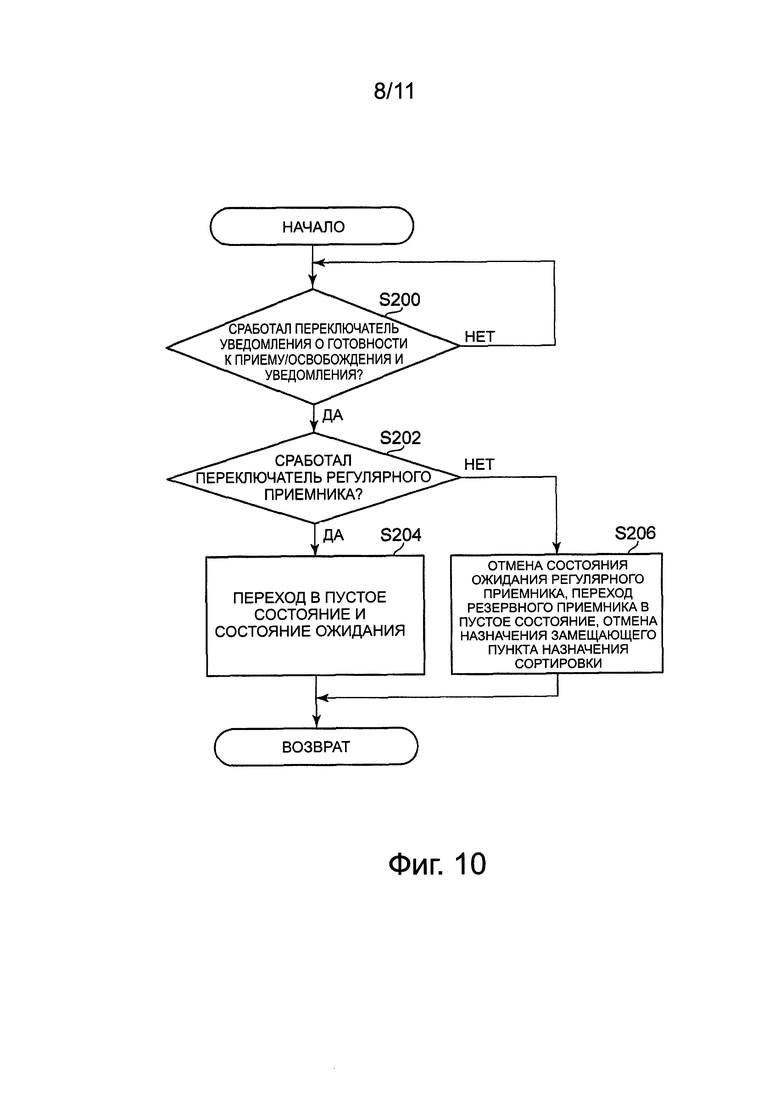
Фиг. 10 представляет логическую схему последовательности операций, выполняемых модулем 54 управления транспортировкой в ответ на срабатывание переключателя 37 сообщения о готовности к приему/освобождению и оповещения;
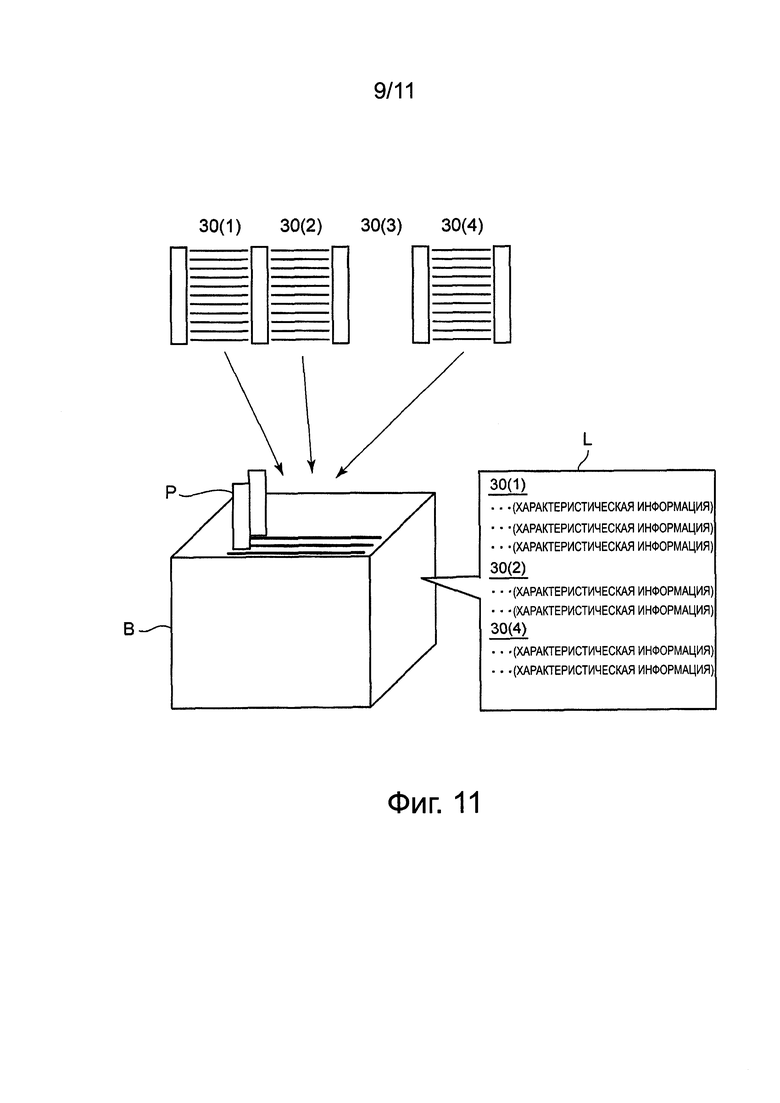
Фиг. 11 представляет схему, иллюстрирующую содержание информации 85 о содержимом выходного контейнера;
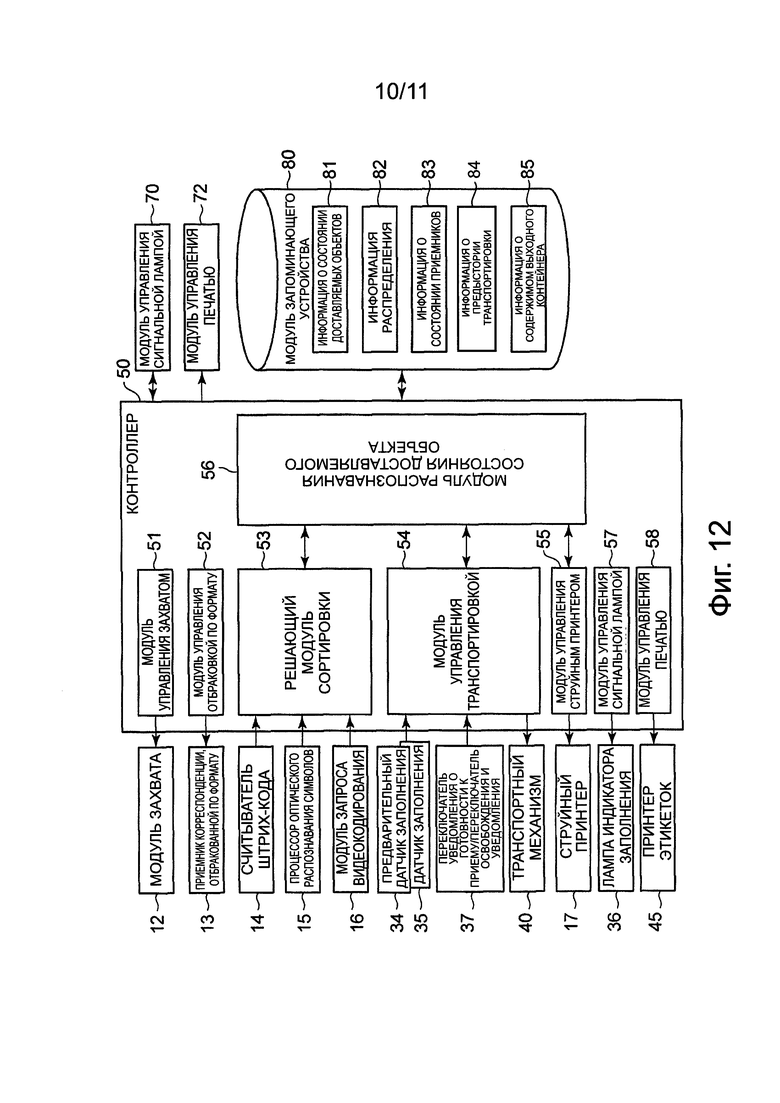
Фиг. 12 представляет схему, показывающую пример конфигурации устройства 1 для обработки доставки с главным контроллером 50 в центре согласно второму варианту; и
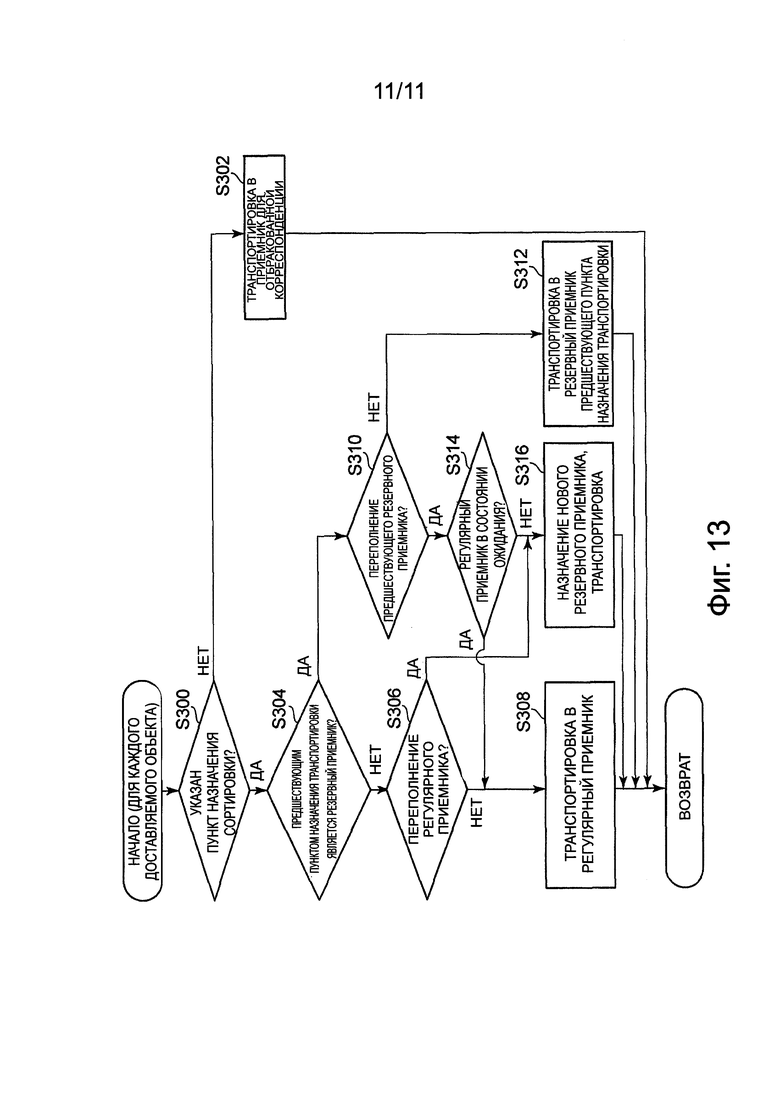
Фиг. 13 представляет логическую схему последовательности операций, выполняемых модулем 54 управления транспортировкой согласно второму варианту.
Подробное описание
Согласно одному из вариантов предложено устройство для обработки доставки, содержащее несколько приемников, конфигурированных для укладки доставляемых объектов; конвейер, конфигурированный для транспортировки доставляемых объектов в назначенный приемник из совокупности имеющихся приемников; первый детектор, конфигурированный для обнаружения, что контролируемый приемник из совокупности нескольких приемников находится в состоянии переполнения, когда в таком приемнике накоплено сверх заданного количества доставляемых объектов; второй детектор, конфигурированный для обнаружения, что контролируемый приемник из совокупности нескольких приемников находится в пустом состоянии; и главный контроллер, конфигурированный для указания регулярного приемника из совокупности нескольких приемников, служащего пунктом назначения сортировки для доставляемого объекта на основе адресной информации, получаемой от доставляемого объекта, и управления конвейером таким образом, что доставляемый объект транспортируют в этот указанный регулярный приемник, служащий пунктом назначения сортировки, из совокупности нескольких приемников, так что если приемник, служащий пунктом назначения сортировки, находится в состоянии переполнения, тогда главный контроллер останавливает транспортировку доставляемых объектов в этот служащий пунктом назначения сортировки и перешедший в состояние переполнения регулярный приемник и выбирает резервный приемник из совокупности нескольких приемников, не коррелированных с какой-либо адресной информацией, в качестве пункта назначения сортировки, замещающего пункт назначения сортировки, перешедшего в состояние переполнения, и после выбора замещающего пункта назначения сортировки, когда регулярный приемник, перешедший ранее в состояние переполнения, переходит в пустое состояние, главный контроллер останавливает транспортировку доставляемых объектов в резервный приемник, выбранный в качестве замещающего пункта назначения сортировки, и возобновляет транспортировку доставляемых объектов в регулярный приемник, перешедший в пустое состояние.
Далее, применительно к прилагаемым чертежам пояснены устройство для обработки доставки и способ обработки доставки согласно нескольким вариантам.
Первый вариант осуществления
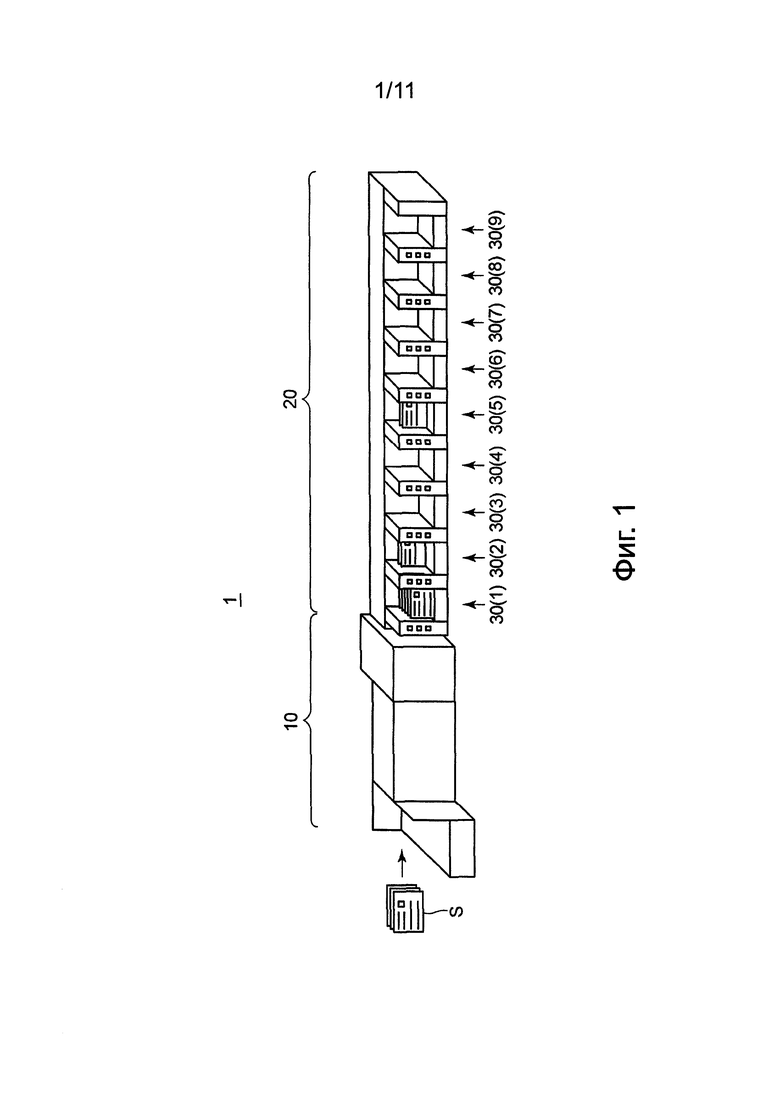
На Фиг. 1 представлена схема, показывающая общий вид конфигурации устройства 1 для обработки доставки согласно первому варианту. Это устройство 1 для обработки доставки представляет собой устройство для обработки и классификации почтовых отправлений, которое может быть установлено в почтовом отделении или на аналогичном объекте. Это устройство 1 для обработки доставки распознает адреса, которые, например, написаны или наклеены на доставляемые объекты S, такие как почтовые открытки, письма и т.п., и сортирует и укладывает эти доставляемые объекты S в приемники в соответствии с распознанными адресами.
Устройство 1 для обработки доставки содержит модуль 10 предклассификационной обработки и модуль 20 классификации, например. Например, в составе модуля 20 классификации находятся несколько приемников (накопительных модулей) 30(1)-30(9). В последующем цифры, приведенные в скобках рядом с цифровыми позиционными обозначениями, предназначены служить в качестве информации для идентификации приемников. Отметим, что приемников 30 должно быть несколько, иными словами, их должно быть два или более.
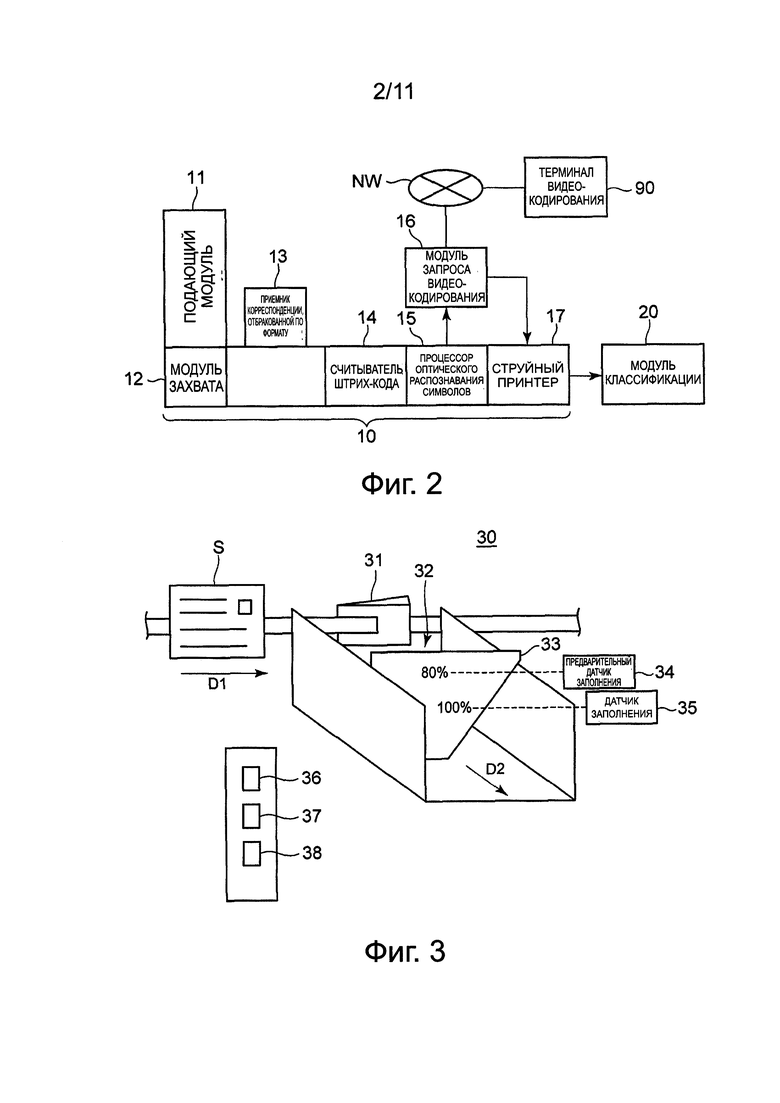
На Фиг. 2 представлена схема, показывающая конфигурацию модуля 10 предклассификационной обработки. Этот модуль 10 предклассификационной обработки содержит, например, подающий модуль 11, модуль 12 захвата, приемник 13 отбракованной корреспонденции, считыватель 14 штрихкода, 14, процессор 15 OCR (оптическое распознавание символов), модуль 16 запроса VC (видео кодирования) и IJP (струйный принтер) 17.
Несколько доставляемых объектов S загружают вручную, например, это делает оператор, в подающий модуль 11. Модуль 12 захвата берет, один за другим, доставляемые объекты S, загруженные в подающий модуль 11, и передает эти объекты на транспортный путь. На этом транспортном пути удаляют доставляемые объекты S, загрязненные посторонними веществами, и доставляемые объекты S, не соответствующие заданному формату, и накапливают отбракованные объекты в приемнике 13 отбракованной корреспонденции.
Считыватель 14 штрихкода осуществляет считывание штрихкодов, нанесенных на доставляемые объекты S, на которых напечатаны скрытые или малозаметные штрихкоды, декодирует информацию, закодированную в этих скрытых штрихкодах, и передает декодированную информацию главному контроллеру 50 (будет рассмотрен позднее). В этот момент доставляемые объекты S, на которых напечатаны скрытые штрихкоды, являются, например, доставляемыми объектами S, нанесенную на которые идентификационную информацию можно прочитать посредством VC-обработки (будет разъяснена позднее), но которые не могут быть транспортированы в приемник, соответствующий их классификации.
Процессор 15 OCR содержит видеокамеру (линейный сенсор), считывающую изображение доставляемых объектов S, осуществляет обработку OCR применительно к изображению, считываемому видеокамерой, и считывает такую информацию, как почтовый индекс, адрес и указание отправителя доставляемого объекта S. Отметим, что OCR-обработка (например, распознавание символов, отличных от почтового индекса) может быть также осуществлена распределенным образом посредством других компьютеров, присоединенных через сеть связи.
Модуль 16 запроса VC передает изображения доставляемых объектов S, с которых процессор 15 OCR не в состоянии прочитать всю или часть информации, через сеть NW связи VC-терминалу 90 и принимает информацию (например, почтовый индекс или адрес), относящуюся к доставляемым объектам S, от VC-терминала 90. Изображения, принимаемые от устройства 1 для обработки доставки, представляют на дисплее VC-терминала 90 оператору, а информацию, введенную оператором, возвращают в устройство 1 для обработки доставки. Такая обработка представленных на дисплее изображений и ввод информации именуются «VC-обработкой».
Принтер IJP 17 печатает кодирующую информацию относительно доставляемых объектов S, получаемую посредством процессора 15 OCR или модуля 16 запроса VC из скрытых штрихкодов, на доставляемых объектах S. Затем считывают скрытый штрихкод посредством считывателя штрихкода, соединенного с принтером IJP 17, и проверяют этот штрихкод.
На Фиг. 3 представлена схема, показывающая пример конфигурации приемника 30. Здесь не делается различий между приемниками 30, а последующие пояснения приведены без идентификации приемников 30 цифрами в скобках. Приемник 30 содержит, например, отводящее устройство 31, транспортный путь 32, модуль 33 резервирующей плиты, датчики 34 и 35, лампу 36 индикатора заполнения, переключатель 37 сообщения о готовности к приему/освобождению и оповещения и переключатель 38 печати этикеток.
Отводящее устройство 31 направляет, например, доставляемые объекты S, которые захватываются лентой и транспортируются в направлении D1, к транспортному пути 32. На этом транспортном пути 32 накапливают доставляемые объекты S в ориентации, параллельной модулю 33 задней упорной пластины. На чертеже модуль 33 задней упорной пластины подпружинен и стремится сдвигаться в направлении, противоположном направлению D2, так что по мере накопления доставляемых объектов S эта пластина перемещается в направлении D2.
Датчики 34 и 35 передают на выход сигнал в ответ на вхождение в контакт с модулем 33 задней упорной пластины, выполненным из металла или подобного материала. Например, предварительный датчик 34 заполнения может быть отрегулирован для передачи на выход сигнала (предварительного сигнала заполнения), когда стопка доставляемых объектов S достигнет примерно 80% максимальной накопительной емкости приемника 30, а датчик 35 заполнения может быть отрегулирован для передачи на выход сигнала (сигнала полноты), когда стопка доставляемых объектов S достигнет примерно 100% максимальной накопительной емкости приемника 30.
Лампа 36 индикатора заполнения, переключатель 37 сообщения о готовности к приему/освобождению и оповещения и переключатель 38 печати этикеток могут быть установлены в любом месте (например, на конце поперечной стенки 38 транспортного пути 32). Лампа 36 индикатора заполнения может, например, излучать желтый свет, когда появляется предварительный сигнал заполнения, и может излучать красный цвет, когда появляется сигнал полноты. Переключатель 37 сообщения о готовности к приему/освобождению и оповещения представляет собой переключатель, приводимый в действие оператором, когда этот оператор извлечет все доставляемые объекты S из приемника 30. Например, переключатель 37 сообщения о готовности к приему/освобождению и оповещения может быть так отрегулирован, чтобы в обычном состоянии передавать на выход сигнал «Выкл.» (OFF) и передавать на выход сигнал «Вкл.» (ON), когда его приведет в действие оператор. Переключатель 38 печати этикеток представляет собой переключатель, инициирующий печать устройством карточки, на которой напечатана идентификационная информация, относящаяся к приемнику 30.
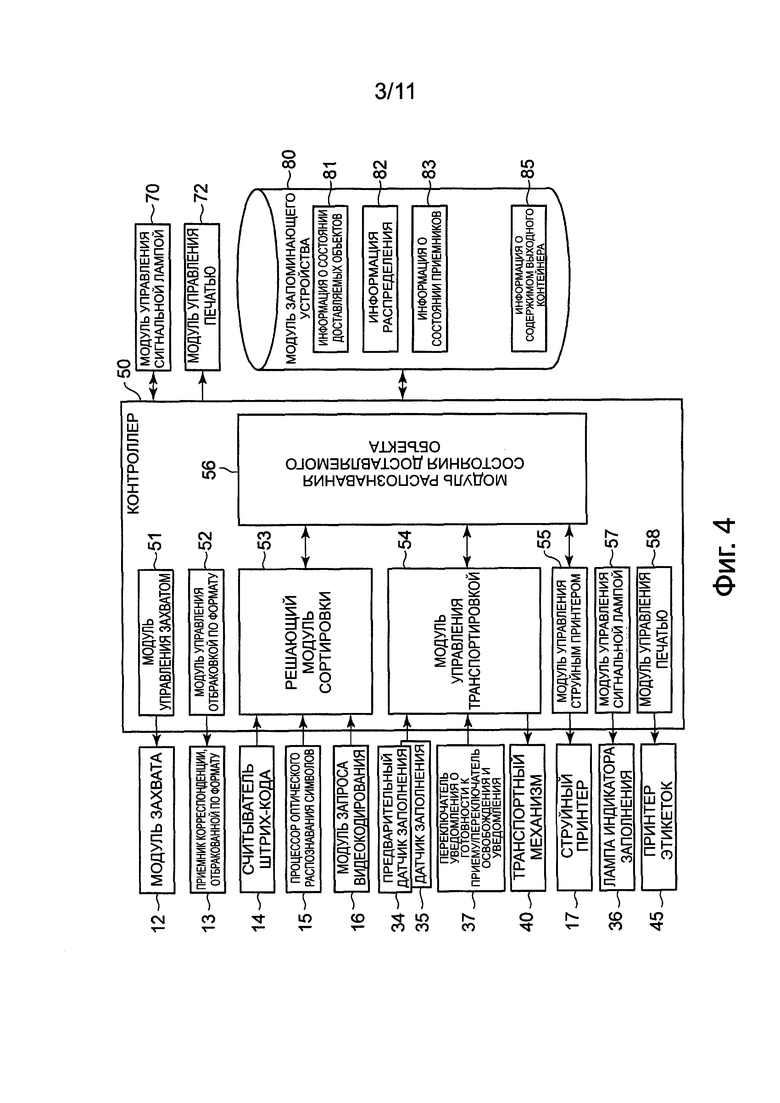
Отдельными модулями устройства 1 для обработки доставки, конфигурированного, как описано выше, управляет главный контроллер 50. На Фиг. 4 представлена схема, показывающая пример конфигурации устройства 1 для обработки доставки с главным контроллером 50 в центре. Главный контроллер 50 содержит, например, модуль 51 управления захватом, модуль 52 управления отбраковкой по формату, решающий модуль 53 сортировки (модуль определения пункта назначения сортировки), модуль 54 управления транспортировкой, модуль 55 управления струйным принтером (IJP), модуль 56 распознавания состояния доставляемого объекта, модуль 57 управления сигнальными лампочками и модуль 58 управления печатью. Эти функциональные модули могут быть также программными функциональными модулями, реализованными посредством выполнения процессором, таким как процессор CPU (центральный процессор), программы, сохраняемой в модуле 80 запоминающего устройства. Более того, часть или все указанные функциональные модули могут быть также реализованы аппаратно, например, в виде БИС (LSI (большая интегральная схема)), в виде схемы ASIC (специализированная интегральная схема) или интерфейсов различных типов.
Более того, главный контроллер 50 соединен с транспортным механизмом 40, принтером 45 этикеток, модулем 70 ввода, дисплейным модулем 72 и модулем 80 запоминающего устройства, например. Транспортный механизм 40 содержит двигатель, который приводит в действие отводящее устройство 31 в описанном выше приемнике 30, ленту конвейера, которая транспортирует доставляемые объекты S в модуль 20 классификации, приводной двигатель для этой ленты и другие подобные компоненты. Принтер 45 этикеток представляет собой принтер, отдельный от струйного принтера IJP 17. Модуль 70 ввода представляет собой устройство ввода, такое как клавиатура, мышь или сенсорная панель. Дисплейный модуль 72 представляет собой дисплейное устройство, такое как LCD (жидкокристаллический дисплей), органическое EL (электролюминесцентное) дисплейное устройство или другое подобное устройство. Модуль 80 запоминающего устройства может быть реализован, например, посредством ЗУПВ (запоминающее устройство с произвольной выборкой (RAM (random access memory))), ПЗУ (постоянное запоминающее устройство (ROM (read-only memory))), накопителя на жестком диске (HDD (hard-disk drive)), устройства флэш-памяти или другого подобного устройства. Помимо программ, выполняемых процессором главного контроллера 50, модуль 80 запоминающего устройства сохраняет информацию 81 о состоянии доставляемых объектов, информацию 82 распределения, информацию 83 о состоянии приемников, информацию 85 о содержимом выходного контейнера и другую подобную информацию.
Модуль 51 управления захватом осуществляет управление модулем 12 захвата. Модуль 52 управления отбраковкой по формату осуществляет управление, например, приводным двигателем отводящего устройства (не показано), которое направляет доставляемые устройства к приемнику 13 отбракованной корреспонденции.
Решающий модуль 53 сортировки получает результаты обработки данных от считывателя 14 штрихкода, процессора OCR 15, модуля 16 запроса VC и указывает на основе адресной информации (например, почтового адреса, входящего в состав результатов обработки данных) приемники 30, в которые должны быть в результате сортировки помещены доставляемые объекты S, (пункты назначения сортировки). В случае адресов в Японии, например, пункты назначения сортировки определяют путем агрегирования адресов, для которых «номер блока» (по-японски: "-chome") в составе адреса совпадает. Решающий модуль 53 сортировки просматривает информацию корреляции, которая осуществляет корреляцию адресной информации с пунктом назначения сортировки и задает пункт назначения сортировки. Следует отметить, что эта информации корреляции может быть в форме табулированных данных или в форме информации, встроенной в переменные и программы.
На основе сигналов, поступающих от датчиков 34, 35, и сигнала, вводимого от переключателя 37 сообщения о готовности к приему/освобождению и оповещения, модуль 54 управления транспортировкой дает команду транспортному механизму 40, который транспортирует доставляемые объекты S в приемник 30, соответствующий найденному пункту назначения сортировки. Это будет пояснено позднее. Модуль 55 управления струйным принтером осуществляет управление эти принтером IJP 17.
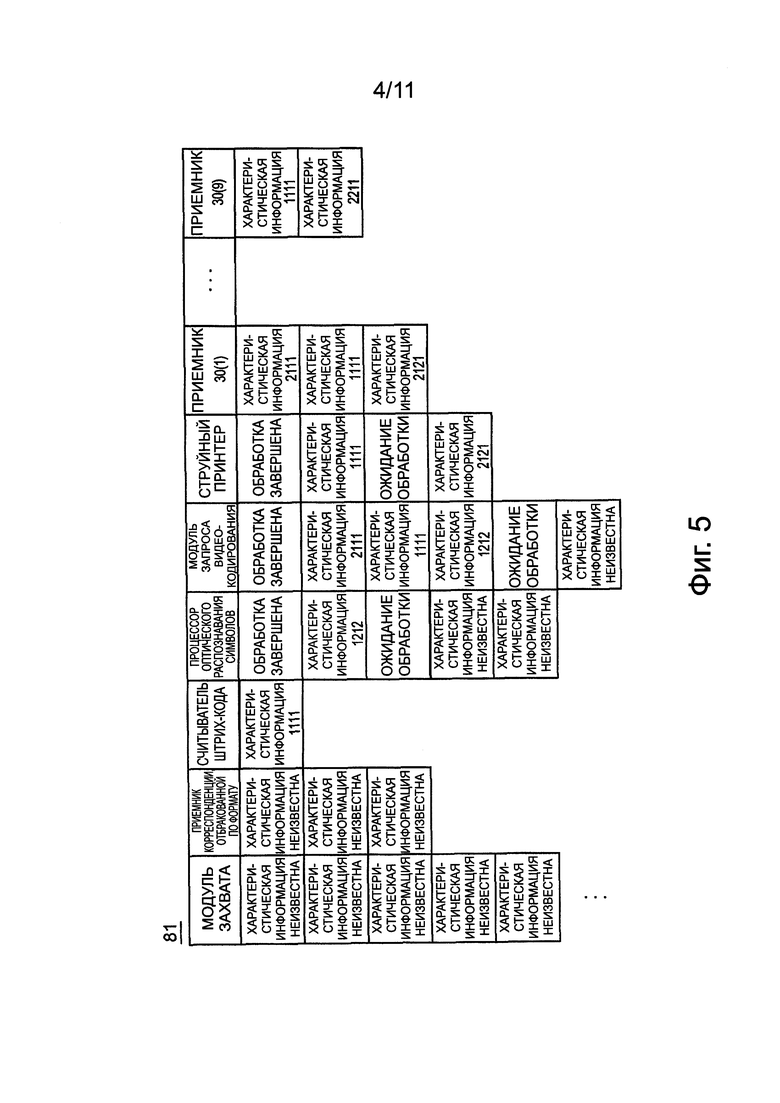
Модуль 56 распознавания состояния доставляемого объекта консолидирует результаты обработки данных в решающем модуле 53 сортировки, модуле 54 управления транспортировкой, модуле 55 управления принтером UP и других подобных модулях и распознает состояние доставляемых объектов S, отбираемых модулем 12 захвата. Модуль 56 распознавания состояния доставляемого объекта сохраняет результаты распознавания в виде информации 81 о состоянии доставляемых объектов в модуле 80 запоминающего устройства. На Фиг. 5 представлена схема, упрощенно показывающая содержание данных, сохраняемых в качестве информации 81 состояния доставляемых объектов 81. Как показано на чертеже, информация 81 о состоянии доставляемых объектов содержит не только характеристическую информацию о доставляемых объектах S, накапливаемых в каждом приемнике 30, но также число доставляемых объектов S и характеристическую информацию о таких объектах (которая была уже установлена), помещенных в различные приемники устройства 1 для обработки доставки. В дальнейшем предполагается, что характеристическая информация о доставляемых объектах S образована адресной информацией о доставляемых объектах S, такой как почтовые индексы.
Модуль 57 управления сигнальными лампочками осуществляет управления лампой 36 индикатора заполнения на основе сигналов, поступающих от датчиков 34 и 35. Модуль 58 управления печатью осуществляет управление принтером 45 этикеток таким образом, чтобы напечатать список содержимого контейнера в ответ на поступивший от оператора запрос выпустить такой список. Кроме того, когда оператор приводит в действие переключатель 38 печати этикеток, модуль 58 управления печатью дает команду принтеру 45 этикеток напечатать идентификационную информацию приемника 30, соответствующего этому переключателю 38 печати этикеток.
Далее приведено пояснение динамического управления распределением, выполняемого модулем 54 управления транспортировкой. Как показано на Фиг. 1, устройство 1 для обработки доставки имеет несколько приемников 30. Из этой совокупности приемников 30, например приемники 30(1)-30(5), рассматриваются в качестве регулярных приемников, которым присвоены характеристики (уникальные) пунктов назначения сортировки, приемники 30(6)-30(8) рассматриваются в качестве резервных приемников для динамического распределения, а приемник 30(9) рассматривают в качестве приемника отбракованной корреспонденции, где накапливают доставляемые объекты S, для которых пункт назначения сортировки неясен. Когда регулярный приемник перейдет в состояние переполнения, в котором в этом приемнике накоплено больше заданного числа доставляемых объектов, тогда один из резервных приемников выбирают в качестве временного пункта назначения сортировки, заменяющего регулярный приемник. Здесь под «состоянием переполнения» понимают состояние, когда приемник 30. заполнен целиком или близок к тому, чтобы стать заполненным целиком. Например, когда поступил предварительный сигнал заполнения от предварительного датчика 34 заполнения или сигнал полноты от датчика 35 заполнения, тогда модуль 54 управления транспортировкой определяет, что рассматриваемый приемник 30 оказался в состоянии переполнения. Здесь регулярным приемникам и резервным приемникам могут быть присвоены фиксированные роли, но роли этих приемников могут также изменяться динамически в ответ на транспортное состояние модуля 54 управления транспортировкой в соответствии с действиями оператора. Например, можно контролировать состояние работы приемников 30 в течение заданного периода, а модуль 54 управления транспортировкой может осуществлять управление таким образом, чтобы, когда коэффициент использования резервных приемников невелик, уменьшить число резервных приемников, или когда коэффициент использования резервных приемников велик, увеличить число резервных приемников. В таком случае возможен, например, переход из первого состояния, в котором приемники 30(1)-30(5) считаются регулярными приемниками, а приемники 30(6)-30(8) считаются резервными приемниками, во второе состояние, когда приемники 30(1)-30(4) считаются регулярными приемниками, а приемники 30(5)-30(8) считаются резервными приемниками. Таким образом, устройство 1 для обработки доставки может работать более эффективно.
Модуль 54 управления транспортировкой использует информацию 82 распределения для управления тем, какой из резервных приемников выбрать в качестве временного пункта назначения сортировки, как описано выше. На Фиг. 6 представлена схема, показывающая пример информации, сохраняемой в качестве информации 82 распределения. В примере, показанном на Фиг. 6, приемник 30(1) находится в состоянии переполнения, а также приемник 30(6), который был выбран в качестве временного пункта назначения сортировки, замещающего приемник 30(1), тоже перешел в состояние переполнения, так что, в свою очередь, приемник 30(7) выбран в качестве временного пункта назначения сортировки, замещающего приемник 30(1). Более того, модуль 54 управления транспортировкой управляет приемниками 30, находящимися в состоянии переполнения, с использованием информации 83 о состоянии приемников. На Фиг. 7 представлена схема, показывающая пример информации, сохраняемой в качестве информации о состоянии приемников. На этом чертеже состояние 1 обозначает информацию, указывающую, имеет ли место состояние переполнения, где значение «1» указывает на состояние переполнения, а значение «0» указывает на отсутствие состояния переполнения. Далее, значение «1» для состояния 2 указывает состояние ожидания, в котором сработал переключатель 37 сообщения о готовности к приему/освобождению, и оповещения и произошел переход из состояния переполнения в пустое состояние в ожидании, когда резервный приемник перейдет в состояние переполнения, тогда как значение «0» обозначение состояние, отличное от состояния ожидания.
На Фиг. 8 представлена схема, упрощенно показывающая управление, осуществляемое модулем 54 управления транспортировкой. В последующих пояснениях, когда пунктом назначения сортировки для некоего конкретного доставляемого объекта S, выбранным посредством решающего модуля 53 сортировки, является приемник 30(1), тогда этот доставляемый объект S обозначен как доставляемый объект S(1).
Как показывает Ситуация (А) на Фиг. 8, когда приемник 30(1), являющийся регулярным приемником, переходит в состояние переполнения, тогда модуль 54 управления транспортировкой прекращает транспортировку доставляемых объектов S(1) в этот приемник 30(1), просматривает информацию 82 распределения и затем выбирает приемник 30 (6), являющийся резервным приемником, который еще не был выбран пунктом назначения сортировки, в качестве временного пункта назначения сортировки, замещающего приемник 30(1).
Затем, как показывает Ситуация (В) на Фиг. 8, до тех пор пока доставляемые объекты S(1) не будут извлечены из приемника 30(1) и не сработает переключатель 37 сообщения о готовности к приему/освобождению и оповещения (переключатель 37(1) сообщения о готовности к приему/освобождению и оповещения) для приемника 30(1), модуль 54 управления транспортировкой осуществляет транспортировку доставляемых объектов S(1), которые на самом деле должны были бы быть направлены в приемник 30(1), в приемник 30(6), а не в приемник 30(1).
Далее, как показывает Ситуация (С) на Фиг. 8, когда доставляемые объекты S извлечены из приемника 30(1) и сработал переключатель 37(1) сообщения о готовности к приему/освобождению и оповещения, модуль 54 управления транспортировкой продолжает осуществлять транспортировку доставляемых объектов S(1) в приемник 30(6) до тех пор, пока этот приемник 30(6) не перейдет в состояние переполнения. Затем, как показывает Ситуация (D) на Фиг. 8, когда приемник 30(6) перейдет в состояние переполнения, модуль 54 управления транспортировкой прекращает транспортировку доставляемых объектов S(1) в этот приемник 30(6) и возобновляет транспортировку доставляемых объектов S(1) в приемник 30(1), находящийся до этого момента в пустом состоянии. Следует отметить, что если приемник 30(6) также переходит в состояние переполнения прежде, чем сработал переключатель 37(1) сообщения о готовности к приему/освобождению и оповещения, тогда модуль 54 управления транспортировкой выбирает еще один приемник в качестве пункта назначения сортировки, замещающего приемник 30(1). Устройство 1 для обработки доставки может быть также конфигурировано таким образом, чтобы после срабатывания переключателя 37(1) сообщения о готовности к приему/освобождению и оповещения модуль 54 управления транспортировкой возобновлял транспортировку доставляемых объектов S(1) в приемник 30(1).
Затем, как показывает Ситуация (Е) на Фиг. 8, когда приемник 30(6) перейдет в пустое состояние, модуль 54 управления транспортировкой отменяет временный выбор функции для приемника 30(6), и когда после этого какой-либо из регулярных приемников перейдет в состояние переполнения, тогда этот приемник 30(6) может быть снова выбран в качестве временного пункта назначения сортировки для замещения такого регулярного приемника.
При таком управлении устройство 1 для обработки доставки согласно рассматриваемому варианту может осуществлять сортировку и укладку в приемники доставляемых объектов S более эффективно. Прежде всего при использовании устройства 1 для обработки доставки согласно рассматриваемому варианту можно избежать нерационального режима управления, в котором, после того как регулярный приемник, перешедший ранее в состояние переполнения, вернулся в пустое состояние, транспортировка доставляемых объектов в резервный приемник, выбранный в качестве замещающего пункта назначения сортировки, прекращается, а возобновляется транспортировка доставляемых объектов в регулярный приемник, вернувшийся в пустое состояние, что ведет к частым заменам приемника 30, в который транспортируют доставляемые объекты.
Более того, при использовании устройства 1 для обработки доставки согласно рассматриваемому варианту можно предотвратить возникновение незавершенных состояний, в которых, после того как регулярный приемник, бывший в состоянии переполнении, перешел в пустое состояние, когда резервный приемник, выбранный в качестве замещающего пункта назначения сортировки, еще не перешел в состояние переполнения, возобновляется транспортировка доставляемых объектов в пустой регулярный приемник, так что пункт назначения транспортировки изменяется на регулярный приемник, когда в резервном приемнике еще осталось свободное место.
Более того, при использовании устройства 1 для обработки доставки согласно рассматриваемому варианту, если резервный приемник, выбранный в качестве замещающего пункта назначения сортировки, перешел в пустое состояние, выбор этого резервного приемника отменяется, после чего этот резервный приемник может быть выбран в качестве замещающего пункта назначения сортировки для какого-либо (в том числе - другого) регулярного приемника, что позволяет использовать резервные приемники более гибко и сортировать и укладывать доставляемые объекты S в приемники более эффективно.
Далее поясняется работа модуля 54 управления транспортировкой с целью реализовать способ управления, показанный на Фиг. 8. На Фиг. 9 представлена логическая схема последовательности операций, выполняемых модулем 54 управления транспортировкой. Процедура согласно этой логической схеме осуществляется для каждого доставляемого объекта S, который нужно транспортировать. Прежде всего модуль 54 управления транспортировкой определяет, задан ли приемник 30, служащий пунктом назначения сортировки, посредством решающего модуля 53 сортировки (Этап S100). Если нет приемника, заданного решающим модулем 53 сортировки в качестве пункта назначения сортировки, тогда модуль 54 управления транспортировкой осуществляет транспортировку доставляемого объекта S в приемник отбракованной корреспонденции (Этап S102).
Если какой-либо приемник 30 задан решающим модулем 53 сортировки в качестве пункта назначения сортировки, тогда модуль 54 управления транспортировкой просматривает информацию 83 о состоянии приемников и определяет, находится ли регулярный приемник, служащий пунктом назначения сортировки, в состоянии переполнения (Этап S104). Если регулярный приемник, служащий пунктом назначения сортировки, не находится в состоянии переполнения, тогда модуль 54 управления транспортировкой определяет, находится ли регулярный приемник, служащий пунктом назначения сортировки, в состоянии ожидания (Этап S106). Если регулярный приемник, служащий пунктом назначения сортировки, не находится в состоянии ожидания, тогда модуль 54 управления транспортировкой дает транспортному механизму 40 команду транспортировать соответствующий доставляемый объект S в регулярный приемник, служащий пунктом назначения сортировки (Этап S108). С другой стороны, если регулярный приемник, служащий пунктом назначения сортировки, находится в состоянии ожидания, тогда модуль 54 управления транспортировкой дает транспортному механизму 40 команду транспортировать доставляемый объект S в резервный приемник, который уже выбран в качестве замещающего пункта назначения сортировки (Этап S114).
Если на Этапе S104 определено, что регулярный приемник, служащий пунктом назначения сортировки, находится в состоянии переполнения, тогда модуль 54 управления транспортировкой просматривает информацию распределения и определяет, был ли какой-либо резервный приемник выбран в качестве пункта назначения сортировки (Этап S110). Если такой резервный приемник уже был выбран, тогда определяют, находится ли этот резервный приемник в состоянии переполнения (Этап S112). Если этот резервный приемник не находится в состоянии переполнения, тогда модуль 54 управления транспортировкой дает транспортному механизму 40 команду транспортировать соответствующий доставляемый объект S в резервный приемник, который был уже выбран (Этап S114).
Если на Этапе S110 определено, что не был выбран ни один резервный приемник в качестве замещающего пункта назначения сортировки, или если на Этапе S112 было определено, что выбранный резервный приемник находится в состоянии переполнения, тогда модуль 54 управления транспортировкой выбирает новый резервный приемник в качестве замещающего пункта назначения сортировки и дает транспортному механизму 40 команду транспортировать соответствующий доставляемый объект S в этот новый резервный приемник (Этап S116).
Далее, модуль 54 управления транспортировкой определяет, находится ли приемник 30, в который транспортируют доставляемый объект S, в состоянии переполнения (Этап S118). Если приемник 30, в который транспортируют доставляемый объект S, находится в состоянии переполнения, тогда модуль 54 управления транспортировкой обновляет информацию о состоянии приемников (Этап S120). На этом процедура для одного доставляемого объекта S завершается.
В рассматриваемом варианте процедура для случая, когда произошло срабатывание переключателя 37 сообщения о готовности к приему/освобождению и оповещения, может быть выполнена отдельно от логической схемы, показанной на Фиг. 9, и параллельно ей. На Фиг. 10 представлена логическая схема последовательности операций, выполняемых модулем 54 управления транспортировкой в ответ на срабатывание переключателя 37 сообщения о готовности к приему/освобождению и оповещения.
Прежде всего модуль 54 управления транспортировкой ожидает, пока не сработает переключатель 37 сообщения о готовности к приему/освобождению и оповещения (Этап S200). Когда сработал переключатель 37 сообщения о готовности к приему/освобождению и оповещения, модуль 54 управления транспортировкой определяет, сработал ли переключатель 37 сообщения о готовности к приему/освобождению и оповещения для регулярного приемника (Этап S202). Если сработал переключатель 37 сообщения о готовности к приему/освобождению и оповещения для регулярного приемника, тогда модуль 54 управления транспортировкой изменяет состояние 1 для этого регулярного приемника в составе информации 83 о состоянии приемников на пустое состояние (0) и изменяет состояние 2 на состояние ожидания (1) (Этап S204).
С другой стороны, если сработал переключатель 37 сообщения о готовности к приему/освобождению и оповещения для резервного приемника, тогда модуль 54 управления транспортировкой изменяет, в составе информации 83 о состоянии приемников, состояние 2 для регулярного приемника, для которого этот резервный приемник выбран в качестве замещающего, на индикатор (0), указывающий, что этот приемник не находится в состоянии ожидания, отменяет состояние ожидания, изменяет состояние 1 резервного приемника на пустое состояние (0) и, кроме того, отменяет, в составе информации 82 распределения, выбор в качестве замещающего для пункта назначения сортировки посредством очистки индикации выбранного пункта назначения сортировки для этого ожидающего приемника (Этап S206).
Модуль 56 распознавания состояния доставляемого объекта генерирует информацию 85 о содержимом выходного контейнера. Этот вопрос поясняется далее. Выходной контейнер представляет собой накопительный контейнер, в котором собираются доставляемые объекты S, извлеченные из приемников 30. На Фиг. 11 представлена схема, иллюстрирующая содержание информации 85 о содержимом выходного контейнера. Когда приемники 30 переходят в состояние переполнения, тогда оператор перемещает доставляемые объекты S, собранные в этих приемниках 30, в выходной контейнер В. Затем оператор приводит в действие переключатель 37 сообщения о готовности к приему/освобождению и оповещения для приемника, из которого были извлечены доставляемые объекты S, и приводит в действие переключатель 38 печати этикеток, выпускающий карточку Р с информацией, указывающей приемник 30, откуда были извлечены доставляемые объекты S. В этой ситуации модуль 58 управления печатью дает команду принтеру 45 этикеток напечатать карточку Р. Эта карточка Р может быть вставлена оператором между доставляемыми объектами S в выходном контейнере В, например.
Когда в выходном контейнере В накопилось некоторое количество доставляемых объектов S, оператор посредством секции 70 ввода дает команду устройству 1 для обработки доставки напечатать информацию 85 о содержимом выходного контейнера. В порядке подготовки к этому каждый раз, когда происходит срабатывание переключателя 37 сообщения о готовности к приему/освобождению и оповещения, модуль 56 распознавания состояния доставляемого объекта получает характеристическую (индивидуальную) информацию о доставляемых объектах S, собранных в соответствующем приемнике 30, из информации 81 о состоянии доставляемых объектов и добавляет полученную информацию к информации 85 о содержимом выходного контейнера. Затем, если имеется запрос напечатать информацию 85 о содержимом выходного контейнера, модуль 58 управления печатью дает принтеру 45 этикеток команду напечатать список L на основе информации 85 о содержимом выходного контейнера. В результате происходит печать списка L с характеристической информацией о доставляемых объектах S, собранных в выходном контейнере В. Как показано на чертеже, информация 85 о содержимом выходного контейнера, служащая основой для списка L, представляет собой информацию, перечисляющую характеристическую информацию о доставляемых объектах S для каждого приемника, из которого собраны такие доставляемые объекты S. Следует отметить, что здесь принтер этикеток для печати карточек Р и принтер этикеток для печати списка L считаются одним и тем же принтером, однако эти принтеры этикеток могут быть также реализованы в виде раздельных устройств. В этом случае (и также если один и тот же принтер этикеток печатает и карточки Р, и список L) модуль управления печатью, который осуществляет управление печатью карточек Р, и модуль управления печатью, который осуществляет управление печатью списка L, могут быть раздельными функциональными модулями, иными словами, раздельными программными функциональными модулями, реализованными посредством раздельных программных модулей, или могут иметь раздельные аппаратные устройства.
Как отмечается выше, когда оператор, управляющий устройством 1 для обработки доставки согласно рассматриваемому варианту, извлекает доставляемые объекты S из приемника 30, он изымает все доставляемые объекты S, собранные в этом приемнике 30, и затем приводит в действие переключатель 37 сообщения о готовности к приему/освобождению и оповещения. Таким образом, поскольку информация 85 о содержимом выходного контейнера обновляется, когда этот процесс запускается срабатыванием переключателя 37 сообщения о готовности к приему/освобождению и оповещения, что указывает тот факт, что все доставляемые объекты S, собранные в приемнике 30, были извлечены, устройство 1 для обработки доставки может понять более точно, какие именно доставляемые объекты S и в каком порядке были собраны в выходном контейнере В. Если было разрешено собирать в выходном контейнере В только часть доставляемых объектов S, накопленных в приемнике 30, то будет затруднительно определить с точностью, из какого числа приемников 30 доставляемые объекты S были собраны в выходном контейнере В.
В устройстве 1 для обработки доставки согласно первому варианту, как поясняется выше, если регулярный приемник, служащий в качестве пункта назначения сортировки, заданного решающим модулем 53 сортировки, переходит в состояние переполнения, тогда транспортировка доставляемых объектов S в этот регулярный приемник прекращается, а один из резервных приемников из совокупности приемников 30, которые не коррелированны с какой-либо адресной информацией, выбирают в качестве замещающего пункта назначения сортировки для пункта назначения сортировки, оказавшегося в состоянии переполнения. После выбора этого резервного приемника в качестве замещающего пункта назначения сортировки, когда регулярный приемник, перешедший ранее в состояние переполнения, переходит в пустое состояние, прекращают транспортировку доставляемых объектов S в резервный приемник, выбранный в качестве замещающего пункта назначения сортировки, и возобновляют транспортировку обновляемых объектов S в пустой регулярный приемник, так что сортировку доставляемых объектов и укладку их в подходящие приемники можно осуществлять более эффективно.
Второй вариант осуществления
Далее будет рассмотрен второй вариант. Здесь рассмотрение будет сфокусировано на отличиях от первого варианта, а аспекты, совпадающие с первым вариантом, опущены. На Фиг. 12 представлена схема, показывающая пример конфигурации устройства 1 для обработки доставки во втором варианте с главным контроллером 50 в центре. Во втором варианте в модуле 80 запоминающего устройства сохраняется информация 84 о предыстории транспортировки. Эта информация 84 предыстории транспортировки перечисляет в хронологическом порядке, для каждого пункта назначения сортировки, приемники 30, выбранные модулем 54 управления транспортировкой в качестве пункта назначения транспортировки.
На Фиг. 13 представлена логическая схема, показывающая последовательность операций, выполняемую модулем 54 управления транспортировкой согласно второму варианту. Прежде всего модуль 54 управления транспортировкой определяет, выбран ли решающим модулем 53 сортировки приемник 30, служащий пунктом назначения сортировки (Этап S300). Если решающий модуль 53 сортировки не указал ни одного приемника 30 в качестве пункта назначения сортировки, тогда модуль 54 управления транспортировкой осуществляет транспортировку текущего доставляемого объекта S в приемник отбракованной корреспонденции (Этап S302).
Если решающий модуль 53 сортировки указал какой-либо из приемников 30 в качестве пункта назначения сортировки, тогда модуль 54 управления транспортировкой просматривает информацию 84 предыстории транспортировки и определяет, является ли приемник 30, в который транспортировался доставляемый объект S, как в предшествующий пункт назначения, резервным приемником (этап S304). Если предшествующий пункт назначения транспортировки не являлся резервным приемником (а напротив, был регулярным приемником), тогда модуль 54 управления транспортировкой определяет, находится ли этот регулярный приемник в состоянии переполнения (Этап S306). Если этот регулярный приемник не находится в состоянии переполнения, тогда модуль 54 управления транспортировкой передает транспортному механизму 40 команду транспортировать соответствующий доставляемый объект S в регулярный приемник (Этап S308). С другой стороны, если регулярный приемник находится в состоянии переполнения, тогда модуль 54 управления транспортировкой выбирает какой-либо из резервных приемников в качестве нового пункта назначения сортировки и дает транспортному механизму 40 команду транспортировать рассматриваемый доставляемый объект S в выбранный резервный приемник (Этап S316).
Если предшествующим пунктом назначения транспортировки являлся какой-либо из резервных приемников, тогда модуль 54 управления транспортировкой определяет, находится ли резервный приемник, являющийся предшествующим пунктом назначения транспортировки, в состоянии переполнения (Этап S310). Если резервный приемник, являвшийся предшествующим пунктом назначения транспортировки, не находится в состоянии переполнения, тогда модуль 54 управления транспортировкой дает транспортному механизму 40 команду транспортировать соответствующий доставляемый объект S в резервную структуру, служившую предшествующим пунктом назначения транспортировки (Этап S312).
Если резервный приемник, являвшийся предшествующим пунктом назначения транспортировки, находится в состоянии переполнения, тогда модуль 54 управления транспортировкой просматривает информацию 83 о состоянии приемников и определяет, находится ли первоначальный регулярный приемник в состоянии ожидания (Этап S314). Если первоначальный регулярный приемник находится в состоянии ожидания, тогда модуль 54 управления транспортировкой дает транспортному механизму 40 команду транспортировать соответствующий доставляемый объект S в первоначальный регулярный приемник (Этап S308). С другой стороны, если первоначальный регулярный регистр не находится в состоянии ожидания, тогда модуль 54 управления транспортировкой выбирает новый резервный приемник в качестве пункта назначения сортировки и дает транспортному механизму 40 команду транспортировать соответствующий доставляемый объект S в этот вновь выбранный резервный приемник (Этап S316).
В устройстве 1 для обработки доставки согласно второму варианту, как поясняется выше, можно добиться эффекта, аналогичного эффекту первого варианта, с использованием программного обеспечения и соответствующей обработки, отличных от программного обеспечения и обработки в первом варианте.
Дополнительные соображения
В изложенных выше вариантах разъясняется, что список L характеристической информации, относящейся к доставляемым объектам S, собранным в выходном контейнере В, печатают, но можно также передавать такой список L характеристической информации относительно доставляемых объектов S в качестве данных другому устройству вместо того, чтобы печатать такой список на бумаге или подобным способом.
Кроме того, в представленных выше вариантах поясняется, что модуль 54 управления транспортировкой определяет, что приемник 30 находится в пустом состоянии, когда срабатывает соответствующий переключатель 37 сообщения о готовности к приему/освобождению и оповещения, но можно также каждый приемник 30 оснастить датчиком, который определяет, находится ли соответствующий приемник 30 в пустом состоянии, и тогда модуль 54 управления транспортировкой определяет, что соответствующий приемник 30 находится в пустом состоянии, на основе выходного сигнала датчика в этом приемнике.
Согласно по меньшей мере одному из вариантов, рассмотренных выше, если выбранный решающим модулем 53 сортировки регулярный приемник, служащий пунктом назначения сортировки, переходит в состояние переполнения, тогда транспортировка доставляемых объектов S в этот регулярный приемник прекращается, после чего выбирают, из нескольких приемников 30, один из резервных приемников, который не коррелирован с какой-либо адресной информацией, в качестве пункта назначения сортировки, замещающего пункт назначения сортировки, перешедший в состояние переполнения, и после выбора указанного резервного приемника в качестве замещающего пункта назначения сортировки, когда регулярный приемник, который был в состоянии переполнения, переходит в пустое состояние, прекращают транспортировку доставляемых объектов S в резервный приемник, выбранный в качестве замещающего пункта назначения сортировки, и возобновляют транспортировку доставляемых объектов S в регулярный приемник, перешедший в пустое состояние, в результате чего сортировку доставляемых объектов S и укладку их в приемнике осуществляют более эффективно.
Описанные выше варианты можно суммировать следующим образом: устройство для обработки доставки содержит несколько приемников, в которые могут быть уложены доставляемые объекты; конвейер, конфигурированный для транспортировки доставляемых объектов в выбранный приемник из совокупности нескольких приемников; датчик для определения количества уложенных в приемник доставляемых объектов в контролируемом приемнике из совокупности нескольких приемников; переключатель, приводимый в действие оператором, когда все доставляемые объекты были извлечены из контролируемого приемника из совокупности приемников; решающий модуль для просмотра корреляционной информации, в которой адресная информация коррелированна с пунктом назначения сортировки, с использованием адресной информации, полученной от доставляемого объекта, и выбирающий приемник, служащий в качестве пункта назначения сортировки рассматриваемого доставляемого объекта; модуль контроллера транспортировки, конфигурированный для управления конвейером таким образом, что этот доставляемый объект транспортируют в выбранный решающим модулем приемник, служащий пунктом назначения сортировки, из совокупности нескольких приемников, причем если выбранный решающим модулем приемник, служащий пунктом назначения сортировки, находится в состоянии переполнения, тогда модуль управления транспортировкой прекращает транспортировку доставляемых объектов в служащий пунктом назначения сортировки приемник, перешедший в состояние переполнения, и выбирает из совокупности приемников резервный приемник, который не коррелирован с какой-либо адресной информацией, в качестве пункта назначения сортировки, замещающего пункт назначения сортировки, перешедший в состояние переполнения, и, после выбора замещающего пункта назначения сортировки, если приемник, перешедший в состояние переполнения, переходит в пустое состояние, модуль управления транспортировкой прекращает транспортировку доставляемых объектов в резервный приемник, выбранный в качестве замещающего пункта назначения сортировки, и возобновляет транспортировку доставляемых объектов в приемник, перешедший в пустое состояние.
Хотя выше были рассмотрены некоторые варианты, эти варианты представлены только в качестве примеров и не предназначены для ограничения объема настоящего изобретения. Действительно, описываемые здесь варианты могут быть реализованы в разнообразных других формах; кроме того, могут быть произведены разнообразные исключения, замещения и изменения в форме описываемых здесь вариантов, не отклоняясь от смысла настоящего изобретения. Прилагаемая формула изобретения и ее эквиваленты предназначены для того, чтобы охватывать такие формы или модификации, какие попадают в пределы объема и смысла настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система коммуникаций здания | 2022 |
|
RU2785231C1 |
| УСТРОЙСТВО СОПРОВОЖДЕНИЯ ДОСТАВКИ, СПОСОБ СОПРОВОЖДЕНИЯ ДОСТАВКИ И ЭНЕРГОНЕЗАВИСИМЫЙ МАШИНОЧИТАЕМЫЙ НОСИТЕЛЬ, СОХРАНЯЮЩИЙ ПРОГРАММУ ДЛЯ СОПРОВОЖДЕНИЯ ДОСТАВКИ | 2018 |
|
RU2707920C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА ДОСТАВКИ КИСЛОРОДА | 2010 |
|
RU2544478C2 |
| СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ЭЛЕКТРОННОГО БАНКОВСКОГО АВТОМАТА РЕЦИКЛИРОВАНИЯ ВАЛЮТЫ | 1998 |
|
RU2189636C2 |
| СПОСОБ И СИСТЕМА ПЕРЕДАЧИ ИЗВЕЩЕНИЙ ПОЛЬЗОВАТЕЛЯМ СИСТЕМЫ ДОСТАВКИ | 2003 |
|
RU2321181C2 |
| ПУНКТЫ ПОЛУЧЕНИЯ ТОВАРОВ | 2013 |
|
RU2719476C2 |
| ПУНКТЫ ПОЛУЧЕНИЯ ТОВАРОВ | 2013 |
|
RU2603554C2 |
| СИСТЕМА ДОСТАВКИ ИНФОРМАЦИИ, ШЛЮЗОВОЕ УСТРОЙСТВО, СПОСОБ УПРАВЛЕНИЯ ДОСТАВКОЙ И КОМПЬЮТЕРНО-ЧИТАЕМЫЙ НОСИТЕЛЬ, СОХРАНЯЮЩИЙ ПРОГРАММУ | 2013 |
|
RU2605366C2 |
| АДАПТЕР И СИСТЕМА РАЗМЕЩЕНИЯ И ДОСТАВКИ ГРУЗА БЕСПИЛОТНЫМИ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2020 |
|
RU2739508C1 |
| СИСТЕМА ДОСТАВКИ КОНТЕЙНЕРА С ПОМОЩЬЮ ДРОНА | 2016 |
|
RU2646689C1 |
Согласно одному варианту осуществления устройство (1) обработки доставки содержит множество приемников (30), выполненных с возможностью укладки в них доставляемых объектов (S); конвейер (40), выполненный с возможностью транспортировки доставляемых объектов (S) в назначенный приемник (30) из множества приемников (30); первый детектор (35), выполненный с возможностью определения, что контролируемый приемник (30) из множества приемников (30) находится в состоянии переполнения, в котором накоплено больше некоторого заданного количества доставляемых объектов (S); второй детектор (37), выполненный с возможностью определения, что контролируемый приемник (30) из множества приемников (30) находится в пустом состоянии, в котором все доставляемые объекты (S) извлечены из указанного приемника (30); и главный контроллер (50), выполненный с возможностью выбора регулярного приемника из множества приемников, служащего пунктом назначения сортировки для доставляемого объекта, на основе адресной информации, получаемой от этого доставляемого объекта, и управления конвейером так, чтобы транспортировать доставляемый объект в регулярный приемник, служащий в качестве пункта назначения сортировки, из множества регулярных приемников, при этом, если приемник (30), служащий в качестве указанного пункта назначения сортировки, находится в состоянии переполнения, то главный контроллер (50) прекращает транспортировку доставляемых объектов (S) в служащий пунктом назначения сортировки регулярный приемник (30), перешедший в состояние переполнения, и назначает резервный приемник (30) из множества приемников (30), не коррелированный с какой-либо адресной информацией, в качестве пункта назначения сортировки, замещающего пункт назначения сортировки, перешедший в состояние переполнения, и после назначения замещающего пункта назначения сортировки, когда регулярный приемник (30), перешедший ранее в состояние переполнения, перешел в пустое состояние, главный контроллер (50) прекращает транспортировку доставляемых объектов (S) в резервный приемник (30), назначенный в качестве замещающего пункта назначения сортировки, и возобновляет транспортировку доставляемых объектов (S) в регулярный приемник (30), перешедший в пустое состояние. 2 н. и 10 з.п. ф-лы, 13 ил.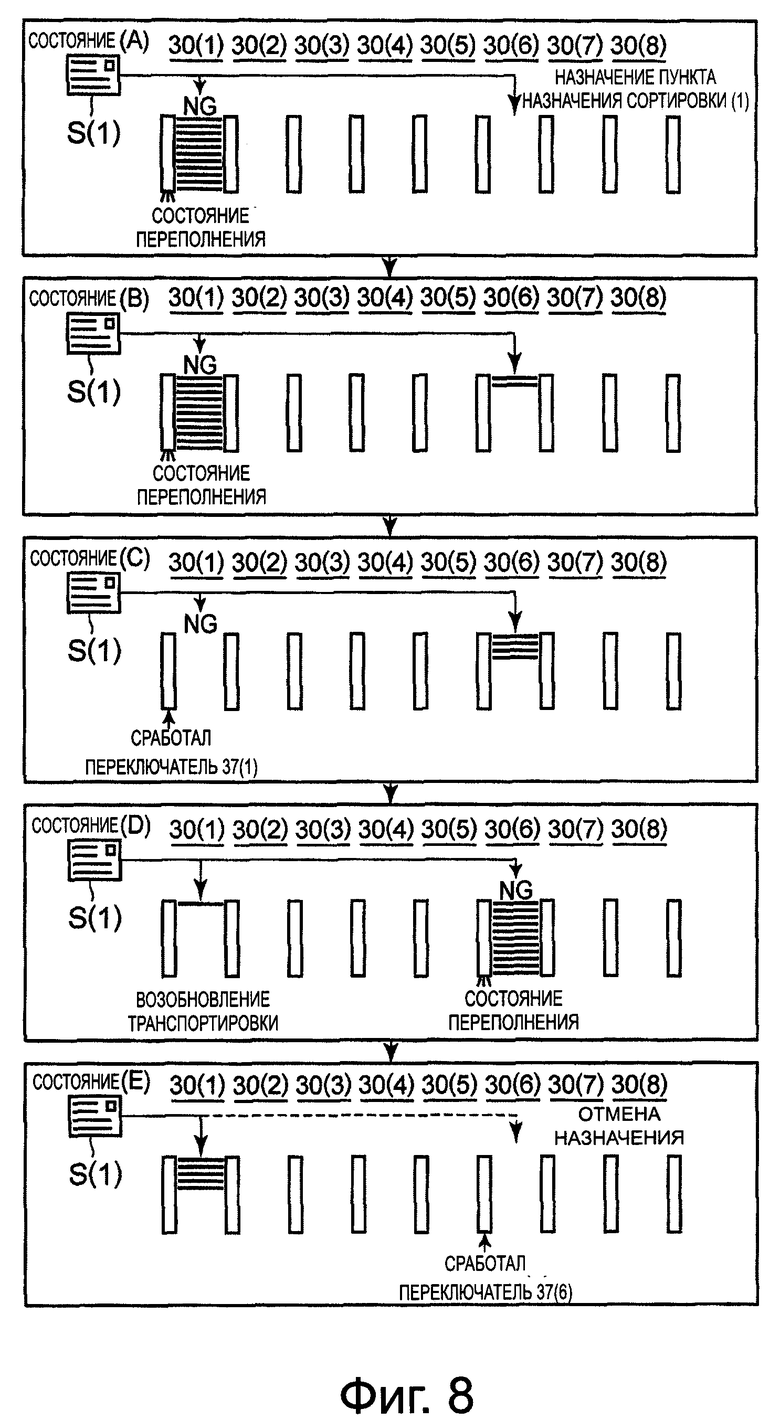
1. Устройство (1) обработки доставки объектов, содержащее:
множество приемников (30), выполненных с возможностью укладки в них доставляемых объектов (S);
конвейер (40), выполненный с возможностью транспортировки доставляемых объектов (S) в выбранный приемник (30) из множества приемников (30);
датчик (35) заполнения, выполненный с возможностью определения, что контролируемый приемник (30) из множества приемников (30) находится в состоянии переполнения, в котором накоплены доставляемые объекты (S) больше заданного количества, и с возможностью вывода сигнала заполнения;
датчик (34) предварительного заполнения, выполненный с возможностью вывода предварительного сигнала заполнения;
детектор (37), выполненный с возможностью определения, что контролируемый приемник (30) из множества приемников (30) находится в пустом состоянии, в котором все доставляемые объекты (S) были извлечены из приемника (30); и
главный контроллер (50), выполненный с возможностью указания регулярного приемника из множества приемников, служащего пунктом назначения сортировки для указанного доставляемого объекта, на основе адресной информации, получаемой от доставляемого объекта, и управления конвейером так, чтобы транспортировать доставляемый объект в указанный регулярный приемник, служащий в качестве пункта назначения сортировки, из множества регулярных приемников,
при этом, если указанный приемник (30), служащий в качества пункта назначения сортировки, находится в состоянии переполнения, то главный контроллер (50) выполнен с возможностью прекращения транспортировки доставляемых объектов (S) в служащий пунктом назначения сортировки регулярный приемник (30), перешедший в состояние переполнения, и назначения резервного приемника (30) из множества приемников (30), не коррелированного с какой-либо адресной информацией, в качестве пункта назначения сортировки, замещающего пункт назначения сортировки, перешедший в состояние переполнения, и, после назначения замещающего пункта назначения сортировки, когда регулярный приемник (30), перешедший ранее в состояние переполнения, переходит в пустое состояние, главный контроллер (50) выполнен с возможностью прекращения транспортировки доставляемых объектов (S) в резервный приемник (30), выбранный в качестве замещающего пункта назначения сортировки, и возобновления транспортировки доставляемых объектов (S) в регулярный приемник (30), перешедший в пустое состояние,
при этом главный контроллер (50) выполнен с возможностью осуществлять управление так, чтобы, когда коэффициент использования резервных приемников (30) невелик, уменьшать число резервных приемников (30), или, когда коэффициент использования резервных приемников (30) велик, увеличивать число резервных приемников (30).
2. Устройство (1) обработки доставки объектов по п. 1, в котором, если резервный приемник (30), назначенный в качестве замещающего пункта назначения сортировки, перешел в состояние переполнения после того, как регулярный приемник (30), перешедший ранее в состояние переполнения, перешел в пустое состояние, модуль (54) управления транспортировкой выполнен с возможностью прекращения транспортировки доставляемых объектов (S) в резервный приемник (30), назначенный в качестве замещающего пункта назначения сортировки, и возобновления транспортировки доставляемых объектов (S) в регулярный приемник (30), находящийся в пустом состоянии.
3. Устройство (1) обработки доставки объектов по п. 1 или 2, в котором, если резервный приемник (30), назначенный в качестве замещающего пункта назначения сортировки, перешел в пустое состояние, то модуль (54) управления транспортировкой выполнен с возможностью отмены назначения указанного резервного приемника (30) в качестве замещающего пункта назначения сортировки, а затем, если какой-либо из регулярных приемников (30), служащий пунктом назначения сортировки, указанный модулем (53) указания, перешел в состояние переполнения, то указанный резервный приемник (30) считается подлежащим назначению в качестве пункта назначения сортировки, замещающего регулярный приемник (30), перешедший в состояние переполнения.
4. Устройство (1) обработки доставки объектов по п. 1 или 2, дополнительно содержащее:
модуль (45) создания списка для создания списка характеристической информации для каждого из доставляемых объектов (S) на основе момента времени, в который регулярный приемник (30) перешел в пустое состояние.
5. Устройство (1) обработки доставки объектов по п. 4, в котором для каждого накопительного контейнера (В) для сбора доставляемых объектов (S), извлеченных из регулярного приемника (30), модуль (45) создания списка выполнен с возможностью создания списка характеристической информации для доставляемых объектов (S), собранных в указанном накопительном контейнере.
6. Устройство (1) обработки доставки объектов по п. 1, в котором детектор (37) представляет собой переключатель, приводимый в действие оператором, извлекающим доставляемые объекты (S) из регулярного приемника (30).
7. Способ обработки доставки объектов для устройства (1) обработки доставки объектов, содержащего множество регулярных приемников (30), выполненных с возможностью укладки в него доставляемых объектов (S); конвейер (40), выполненный с возможностью транспортировки доставляемых объектов (S) в назначенный приемник (30) из множества регулярных приемников (30); датчик (35) заполнения и датчик (34) предварительного заполнения, выполненные с возможностью определения, что контролируемый регулярный приемник (30) из множества регулярных приемников (30) находится в состоянии переполнения, в котором накоплены доставляемые объекты (S) больше заданного количества, причем датчик (35) заполнения выполнен с возможностью вывода сигнала заполнения, а датчик (34) предварительного заполнения выполнен с возможностью вывода предварительного сигнала заполнения; детектор (37), выполненный с возможностью определения, что контролируемый регулярный приемник (30) из множества регулярных приемников (30) находится в пустом состоянии, в котором все доставляемые объекты (S) извлечены из указанного регулярного приемника (30); и модуль (53) указания, выполненный с возможностью указания регулярного приемника (30), служащего пунктом назначения сортировки для доставляемого объекта (S), на основе адресной информации, полученной от доставляемого объекта (S); при этом способ содержит этапы, на которых:
управляют конвейером (40) так, что доставляемый объект (S) транспортируется в указанный модулем (53) указания регулярный приемник (30), служащий пунктом назначения сортировки, из множества регулярных приемников (30);
если указанный модулем (53) указания регулярный приемник, служащий пунктом назначения сортировки, находится в состоянии переполнения, прекращают транспортировку доставляемых объектов (S) в перешедший в состояние переполнения регулярный приемник (30), служащий пунктом назначения сортировки, и назначают из множества регулярных приемников (30) резервный приемник, не коррелированный с какой-либо адресной информацией, в качестве пункта назначения сортировки, замещающего пункт назначения сортировки, перешедший в состояние переполнения; и
после назначения замещающего пункта назначения сортировки, когда регулярный приемник (30), ранее перешедший в состояние переполнения, переходит в пустое состояние, прекращают транспортировку доставляемых объектов (S) в резервный приемник (30), назначенный в качестве замещающего пункта назначения сортировки, и возобновляют транспортировку доставляемых объектов (S) в регулярный приемник (30), перешедший в пустое состояние,
при этом, когда коэффициент использования резервных приемников (30) невелик, уменьшают число резервных приемников (30), или, когда коэффициент использования резервных приемников (30) велик, увеличивают число резервных приемников (30).
8. Способ по п. 7, дополнительно содержащий этапы, на которых:
если резервный приемник (30), назначенный в качестве замещающего пункта назначения сортировки, перешел в состояние переполнения после того, как регулярный приемник (30), перешедший ранее в состояние переполнения, перешел в пустое состояние, прекращают транспортировку доставляемых объектов (S) в резервный приемник (30), назначенный в качестве замещающего пункта назначения сортировки, и возобновляют транспортировку доставляемых объектов (S) в регулярный приемник (30), находящийся в пустом состоянии.
9. Способ по п. 7 или 8, дополнительно содержащий этапы, на которых:
если резервный приемник (30), назначенный в качестве замещающего пункта назначения сортировки, перешел в пустое состояние, отменяют назначение указанного резервного приемника (30) в качестве замещающего пункта назначения сортировки, а затем, если какой-либо из регулярных приемников (30), служащий пунктом назначения сортировки, указанным модулем (53) указания, перешел в состояние переполнения, то считают указанный резервный приемник (30) подлежащим назначению в качестве пункта назначения сортировки, замещающего регулярный приемник (30), перешедший в состояние переполнения.
10. Способ по п. 7, дополнительно содержащий этап, на котором:
создают список характеристической информации для каждого из доставляемых объектов (S) на основе момента времени, в который регулярный приемник (30) перешел в пустое состояние.
11. Способ по п. 10, дополнительно содержащий этап, на котором:
для каждого накопительного контейнера, в котором собирают доставляемые объекты (S), извлеченные из регулярного приемника (30), создают список характеристической информации для доставляемых объектов (S), собранных в указанном накопительном контейнере.
12. Способ по п. 7, в котором детектор (37) представляет собой переключатель, приводимый в действие оператором, который извлекает доставляемые объекты (S) из регулярного приемника (30).
| СПОСОБ СИНТЕЗА МОНОКРИСТАЛЛОВ АЛМАЗА | 1988 |
|
SU1655080A1 |
| ПАТРОН РАСТОЧНОЙ | 2005 |
|
RU2298457C1 |
| US 2005119786 A1, 02.06.2005 | |||
| US 2012296467 A1, 22.11.2012. | |||

