УРОВЕНЬ ТЕХНИКИ
[0001] Настоящее изобретение относится к системам управления или мониторинга промышленных процессов. Более конкретно, настоящее изобретение относится к измерению технологических параметров в промышленном процессе.
[0002] В промышленном применении, системы контроля используют для мониторинга и управления материально-производственными запасами промышленных и химических процессов и тому подобного. Как правило, система управления, которая выполняет эти функции, использует полевые устройства, распределенные в ключевых положениях в промышленном процессе и соединенные со схемой управления в пульте управления с помощью схемы управления процессом. Термин «полевое устройство» относится к любому устройству, которое выполняет функцию в системе распределенного управления или мониторинга процесса, включая в себя все устройства, используемые в измерении, управлении и мониторинге промышленных процессов.
[0003] Некоторые полевые устройства включают в себя датчик технологических параметров, используемый для считывания технологического параметра. Примеры технологических параметров включают в себя расход, давление, уровень, температуру, pH, положение клапана или двигателя, скорость двигателя, положение приводного элемента и так далее.
[0004] Многие типы датчиков технологических параметров основаны на интрузивных технологиях, в которых датчик должен напрямую или косвенно подвергаться воздействию технологической текучей среды, чтобы получить измерение технологических параметров.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0005] Полевое устройство мониторинга технологического параметра промышленного процесса включает в себя устройство захвата изображения. Технологический компонент представляет собой относительное движение в зависимости от технологического параметра. Устройство захвата изображения захватывает изображение, которое изменяется вследствие относительного движения технологического компонента. Процессор обработки изображения, соединенный с устройством захвата изображения, обнаруживает относительное движение технологического компонента и измеряет технологический параметр на основании обнаруженного относительного движения. Выходная схема предоставляет выходной сигнал, относящийся к измеренному технологическому параметру.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0006] Фиг. 1 является упрощенной диаграммой, показывающей систему управления процессом, в которой может быть осуществлено настоящее изобретение.
[0007] Фиг. 2 является поперечным перспективным видом тела вихревого обтекания, расположенного в потоке технологической текучей среды.
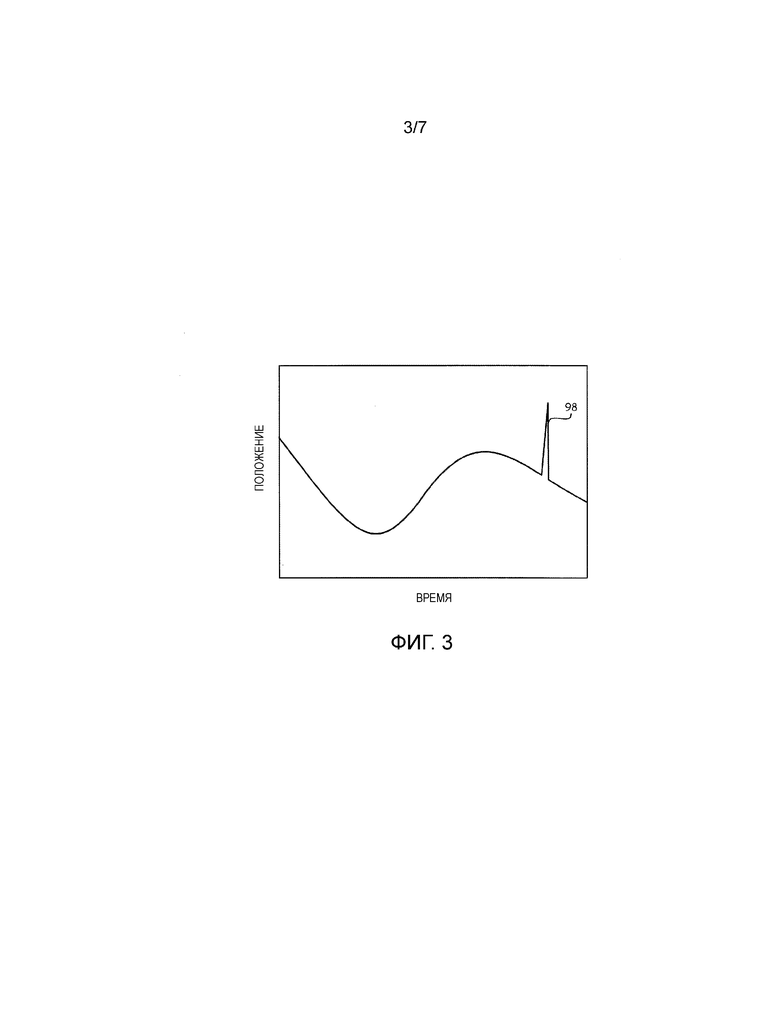
[0008] Фиг. 3 является графиком положения расширения тела вихревого обтекания на Фиг. 2 во времени.
[0009] Фиг. 4 является упрощенной блочной диаграммой, показывающей полевое устройство обработки на Фиг. 1.
[00010] Фиг. 5 является упрощенной электрической диаграммой, изображающей одну конфигурацию устройства захвата изображения для использования с полевым устройством на Фиг. 4.
[00011] Фиг. 6 является упрощенной схематической диаграммой, изображающей один пример схемы обработки для использования с полевым устройством, изображенным на Фиг. 4.
[00012] Фиг. 7 является упрощенной схематической диаграммой, изображающей другой пример конфигурации устройства захвата изображения для использования с полевым устройством, изображенным на Фиг. 4.
[00013] Фиг. 8 является диаграммой, изображающей конфигурацию, в которой устройство захвата изображения движется относительно опорного положения.
ПОДРОБНОЕ ОПИСАНИЕ ИЛЛЮСТРАТИВНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[00014] Технологический параметр промышленного процесса измеряют с использованием способов захвата изображения. Более конкретно, способы построения изображения используют для наблюдения за технологическим компонентом, который представляет собой относительное движение в зависимости от технологического параметра. Изменения в захваченных изображениях вследствие относительного движения могут быть соотнесены с изменениями в технологическом параметре и использованы для измерения технологического параметра. Соотнесение может быть сделано посредством аппроксимации кривой или других способов, которые относятся к относительному движению в технологическом параметре. Соотнесение может быть основано на любом свойстве движения, включая в себя амплитуду, частоту, спектр движения, конкретные паттерны движения, присутствие или отсутствие движения и так далее.
[00015] Фиг. 1 является упрощенной диаграммой, изображающей систему 10 управления или мониторинга процесса, которая включает в себя технологическое устройство 12, соединенное с трубопроводной обвязкой 14. Технологическое устройство 12 может быть любым типом технологического устройства, как, например, передатчик технологического параметра, устройство управления или самостоятельное устройство. Устройство 12 включает в себя устройство 100 захвата изображения, выполненное с возможностью принимать свет или другое электромагнитное излучение 104 и, тем самым, захватывать изображения технологического компонента 106, как объяснено более подробно ниже. Устройство 12 осуществляет связь с удаленным местоположением, как, например, пульт 16 управления процессом, который включает в себя систему 19 управления или мониторинга, по двухпроводной схеме 18 управления процессом. Например, схема 18 может содержать электрическую схему в 4-20 мА, которая также может использоваться для питания устройств, соединенных со схемой 18. Данные могут быть переданы по схеме 18 в соответствии с подходящим протоколом, например, для аналогичного уровня тока, который меняется от 4 до 20 мА, протокол HART® связи, в котором цифровая информация модулируется по току 4-20 мА, протокол FieldBus или Profibus цифровой связи и так далее, включая беспроводные способы связи. Одним примером беспроводного способа связи является протокол WirelessHART® связи в соответствии с IEC 62591. Стандарт Ethernet, оптоволоконные соединения или другие каналы связи могут также быть использованы для осуществления схемы 18.
[00016] Многие способы, используемые для измерения технологического параметра, требуют интрузивной технологии, в которой датчик технологического параметра соединен напрямую или косвенно с технологической текучей средой. Однако существуют случаи, когда предпочтительна неинтрузивная или менее интрузивная технология для увеличения надежности и срока службы, улучшения безопасности, уменьшения экологических проблем, сокращения издержек и увеличения операционной гибкости. Один тип доступной в настоящее время неинтрузивной технологии использует инфракрасные детекторы, которые способны измерять температуры процесса на расстоянии. Однако для других технологических параметров, как, например, расход, уровень или давление, сенсорные компоненты обычно связаны физически непосредственно или косвенно с технологической текучей средой. Недавние исследователи в Массачусетском Институте (MIT) Технологии применили неинтрузивный способ видеообнаружения для обнаружения пульса пациента по мере того, как кровь течет в лице пациента, на основании изменений цвета кожи (см. MIT News, «Исследователи усилили изменения в видео, сделав невидимое видимым, Ларри Хардести, 22 июня 2012, http://web.mit.edu/newsoffice/2012/amplifying-invisible0video-0622/html).
[00017] В примерах осуществлений, обеспечены способ и устройство для измерения технологических параметров с использованием устройств 100 захвата изображений для захвата изображений технологического компонента 106. Технологический компонент 106 представляет относительное движение в зависимости от технологического параметра. Изменения в захваченных изображениях используют для обнаружения относительного движения технологического компонента (перемещение, деформация и так далее). Эти изменения соотносятся с технологическим параметром. Как описано ниже, различные способы могут быть использованы для ввода движения в технологический компонент 106 в зависимости от технологического параметра.
[00018] В одном конкретном примере, устройство 100 захвата изображения может быть использовано для измерения расхода в вихревом расходомере. Фиг. 2 является видом с частичным разрезом, изображающим насос 14, несущий поток технологической текучей среды. В вихревом расходомере тело 40 обтекания (тело вихревого обтекания) расположено в потоке технологической текучей среды. По мере того как технологическая текучая среда проходит мимо тела, создаются вихри, которые следуют за телом вихревого обтекания и формируются по очереди на каждой стороне тела вихревого обтекания. Частота, с которой эти вихри сменяются, связана с расходом текучей среды. Эти сменяющиеся вихри приводят к тому, что сменяющиеся силы применяются к телу вихревого обтекания. С помощью расширения тела вихревого обтекания до местоположения вне насоса 14, эти колебательные движения переводятся в расширение. В типичных конфигурациях уровня техники, датчик, как, например, пьезоэлектрический преобразователь, физически соединен с расширением для измерения колебательных движений. Этот датчик может в конечном итоге сломаться из-за того, что продолжительно подвергается механическим колебательным движениям. В примере на Фиг. 2, технологический компонент 106 содержит расширение, которое видно устройству 100 захвата изображения. Необходимо отметить, что длина расширения может быть увеличена, чтобы усилить количество движения расширения по мере того, как тело вихревого обтекания колеблется в ответ на поток технологической текучей среды.
[00019] Фиг. 3 является графиком положения части 106 расширения на Фиг. 2 во времени. График на Фиг. 3 представляет собой выходного сигнала восстановленного изображения сигнала вихря, обнаруженного с использованием линейного датчика одномерного изображения, и изображает, как захваченное изображение соотносится с двумя технологическими параметрами. Частота колебаний на Фиг. 3 пропорциональна расходу технологической текучей среды. Амплитуда колебаний пропорциональна массе технологической текучей среды. Захваченные изображения также могут быть использованы для доставки диагностической информации. Например, если мимо тела 40 обтекания в технологической текучей среде перемещается какая-то аномалия, как, например, газовый пузырь, мусор и так далее, то колебания на Фиг. 3 представляют собой резкое изменение. Это может выражаться, например, в качестве шумового выброса 98, который может быть использован для запуска диагностического выходного сигнала.
[00020] Как правило, в конфигурации на Фиг. 2, частоты колебательных движений вихря приведут к тому, что технологический компонент 106 будет колебаться между 2 Гц и 70 кГц. Таким образом, устройство 100 захвата изображения должно предпочтительно иметь достаточно быструю скорость захвата для обеспечения своей способности захвата движения технологического компонента 106 на самой высокой частоте колебательных движений вихревого потока. Например, теорема Найквиста о выборке обеспечивает описание номинального интервала выборки, требуемого для точного захвата изображения перемещающегося объекта. Эта теорема гласит, что частота выборки должна быть, по меньшей мере, в два раза больше самой высокой частоты, содержащейся в сигнале, который подлежит выборке. Это позволяет избежать проблем зеркальных частот при выполнении выборки. Применительно к устройствам захвата изображения, эту теорему иногда называют законом Найквиста об измерении обнаружения с однозначным результатом, который гласит, что исследуемое событие должно быть, по меньшей мере, в три раза больше, чем диаметр конкретного размера пиксельного покрытия, чтобы гарантировать, что событие покрывает один полный пиксел при любых обстоятельствах. Дополнительно, чтобы обеспечить то, что движение захвачено точно, надо учитывать ширину полосы пропускания и разрешение устройства захвата изображения. Следующее описание обеспечивает общий анализ вместе с общими оценками в отношении требований к устройству захвата изображения.
[00021] Есть много типов устройств, которые могут быть использованы для захвата двумерных (растровых) видеоизображений. Как правило, изображений от таких устройств достаточно для захвата медленно перемещающихся объектов. Однако при движении с более высокой скоростью это может быть проблематично. Например, камере со сканированием по вертикали и горизонтали с разрешением датчика 1024×1024 пикселей, работающей при частоте синхронизации пикселей в 20 МГц, требуется 52 миллисекунды для захвата полного изображения. Это можно использовать для определения максимальной обнаруживаемой частоты. Более конкретно, при 1024 пикселей на линию, при частоте синхронизации 20 МГц, потребуется 51 микросекунда, чтобы сканировать всю линию. Для всех 1024 линий потребуется 52 миллисекунды, чтобы захватить весь кадр. Это составляет около 19 кадров в секунду. В соответствии с теоремой Найквиста, максимальная обнаруживаемая частота будет около 5 Гц.
[00022] Однолинейные (одномерные) линейные сканеры обеспечивают улучшенную скорость захвата изображения. Примеры линейных сканеров - это те, которые используются в факсимильном аппарате, компьютерном сканере и так далее. При использовании одной линии пикселей, линейный сканер способен выстраивать непрерывное изображение благодаря относительному движению между линейным сканером и изображением. Вертикальное разрешение, следовательно, основано на этом относительном движении. Например, линейный сканер может производить 1024×N изображение, где N непрерывно растет до тех пор, пока сканер работает. Так как однострочная камера выводит только одну линию пикселей на одну выдержку, то меньше времени требуется для захвата изображения. Как только пиксельная информация передана в выходной регистр, активные пиксели доступны для следующей выдержки. Скорость линейного сканирования обратна времени считывания линии, или 1/51 микросекунды при 19000 линий в секунду. Разрешение определяет наименьшую характеристику, которая может быть сканирована. Например, сканирование 2,54 см с 1024 пикселами дает горизонтальное разрешение в 2,54/1024=0,00248 см. В контексте считывания технологического параметра, как, например, расход, скорость сканера относится к максимальной частоте, которая может быть измерена и которая пропорциональна расходу. Однако для получения информации, относящейся к массовому потоку, требуются и высокая скорость, и высокое пиксельное разрешение, чтобы измерить величину движения. В этой конфигурации, максимальная обнаруживаемая частота движения должна быть около 5 кГц.
[00023] Другим примером устройства захвата изображения является датчик с единичным пикселем. Датчик с единичным пикселем может быть использован для измерения движения по мере того, как объект движется в и из поля обзора единичного пиксела. В соответствии с теоремой Найквиста, датчик с единичным пикселем с частотой синхронизации в 20 МГц может обнаруживать движение при частоте до 10 МГц.
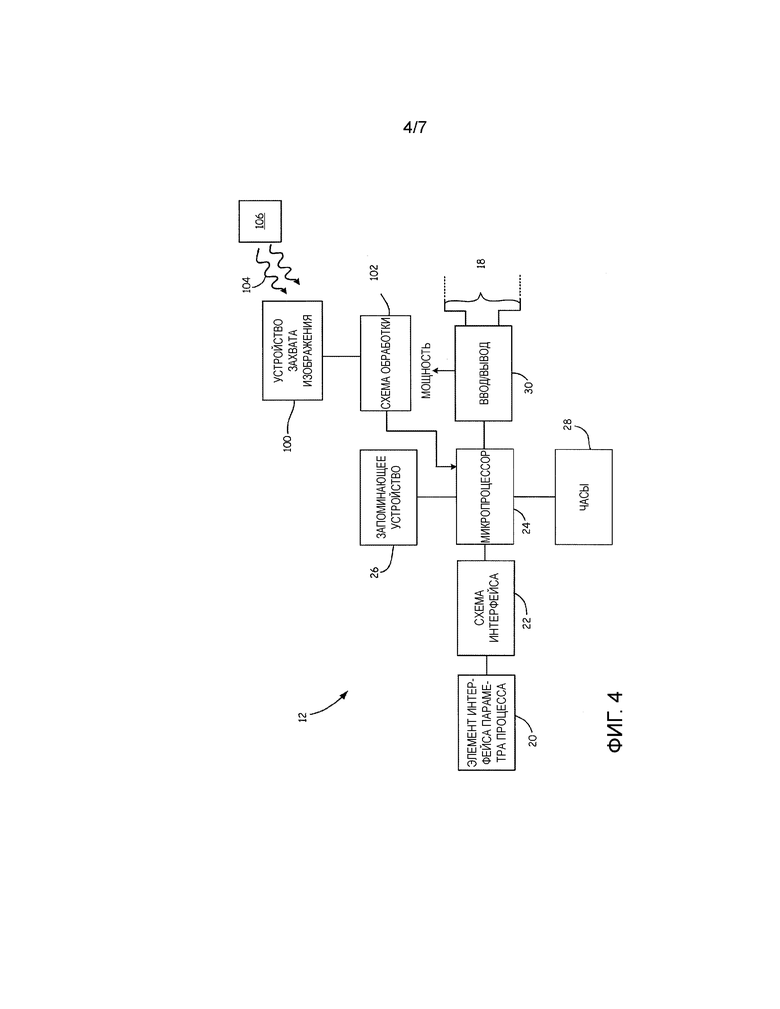
[00024] Фиг. 4 является упрощенной блочной диаграммой технологического устройства 12, выполненного с возможностью считывать технологический параметр с использованием устройства 100 захвата изображения и технологического компонента 106. Устройство 12 может включать в себя опциональный элемент 20 интерфейса технологического параметра. Элемент 20 интерфейса может содержать датчик технологического параметра для считывания технологического параметра, дополнительно к технологического параметру, измеряемому устройством 100 захвата изображения. Подобным образом, элемент 20 интерфейса может содержать элемент управления. Опциональный элемент 20 интерфейса соединен с опциональной схемой 22 интерфейса, которая может функционировать в качестве схемы управления или схемы измерения на основании конфигурации устройства 12. Например, при конфигурации в качестве схемы измерения, схема 22 интерфейса может содержать усилитель, аналогичный цифровому преобразователю, фильтрам и так далее. Считанный технологический параметр может быть предоставлен микропроцессору 24 или другой цифровой схеме, которая работает в соответствии с командами, хранящимися, например, в запоминающем устройстве 26. Когда элемент 20 интерфейса выполнен в качестве элемента управления, то схема 22 интерфейса работает путем обеспечения управляющего сигнала элементу 20. Это может быть основано, например, на выходном сигнале от микропроцессора 24 и, тем самым, в ответ, использоваться для управления работой процесса. Например, микропроцессор 24 может приводить к открытию клапана процесса, включению нагревательного элемента и так далее. Запоминающее устройство 26 хранит данные или другую информацию и может опционально содержать постоянное запоминающее устройство. Микропроцессор работает со скоростью, определенной часами 28. Схема 30 ввода/вывода используется для соединения микропроцессора 24 для обработки контура 18 управления. В некоторых конфигурациях, схема 30 ввода/вывода также обеспечивает выходную мощность, которая используется для питания схемы технологического устройства 12.
[00025] Когда технологическое устройство 12 выполнено в качестве устройства управления процессом, устройство 100 захвата изображения может быть использовано для обеспечения обратной связи для использования в управлении элемента 20 управления. Например, устройство 100 захвата изображения может быть использовано для получения измерения технологического параметра. Измеренная величина технологического параметра затем используется для изменения управляющего сигнала, применяемого к элементу 20 управления. Технологический параметр может быть технологическим параметром, относящимся к технологической текучей среде, как, например, давление, температура, расход и так далее, или может быть технологическим параметром, относящимся к самому элементу управления, как, например, положение клапана, скорость двигателя, положение двигателя, положение привода и так далее.
[00026] Как описано выше, способы захвата изображения используют для получения информации о технологическом параметре от промышленного процесса. Устройство 100 захвата изображения размещено для приема света или другого электромагнитного излучения 104 от технологического компонента 106. Устройство 100 предпочтительно направленное и включает в себя, по меньшей мере, один датчик излучения. Устройство 100 может быть отдельным (дискретным) датчиком или может содержать множество датчиков, собранных в единое устройство. Выходной сигнал от устройства 100 предоставляют схеме 102 обработки, которая предоставляет обработанный выходной сигнал микропроцессору 24. Например, схема 102 обработки может включать в себя схему усиления, схему подавления шума, аналог цифрового преобразователя, схему сравнения и так далее. Выходной сигнал от схемы 102 обработки предоставляют микропроцессору 24 в цифровом формате. Схема обработки может быть осуществлена в устройстве 100, в качестве отдельной схемы или микропроцессором 24 и может быть аналогом цифровой схемы.
[00027] Фиг. 5 изображает один пример конфигурации устройства 100 захвата изображения, сформированного отдельным датчиком 120, который предоставляет выходной сигнал с единичного пиксела. Датчик 120 размещен для приема света или другого электромагнитного излучения 104 от компонента 106, который проходит через опциональную линзу, фильтр или другой элемент 130. В конфигурации, изображенной на Фиг. 5, датчик 120 сформирован с использованием чувствительного к излучению транзистора 132, который соединен с электрическим заземлением по резистору 122. Транзистор 132 соединен с сетевым напряжением положительной степени и предоставляет выходной сигнал схеме 102 обработки, изображенной на Фиг. 4, после приема достаточного света или другого электромагнитного излучения 104, для включения транзистора 132. Этот выходной сигнал может содержать импульс каждый раз, когда компонент 106 перемещается в или из поля обзора датчика 120. Хотя изображен транзистор 132, может быть использована другая технология считывания изображения, включая фотодиоды, устройства (CCD) с зарядовой связью, устройства CMOS и так далее. Дополнительно, в зависимости от типа используемого датчика, может быть собрана дополнительная информация, как, например, цвет (частота принятого излучения), а также амплитуда сигнала. Эта информация может также быть соотнесена с технологическими параметрами в некоторых конфигурациях.
[00028] Фиг. 6 является схематической диаграммой одного примера конфигурации схемы 102 обработки. В осуществлении, изображенном на Фиг. 6, схема 102 обработки включает в себя устройство 140 сравнения, которое принимает выходной сигнал от датчика 120. В конфигурации, изображенной на Фиг. 6, если выходной сигнал от датчика 120 достаточно отличается от опорного, то устройство 140 сравнения предоставляет выходной сигнала высокого логического уровня микропроцессору 24. Если желательно, может быть осуществлена опциональная управляемая схема 142 смещения. В изображенном осуществлении, схема 142 осуществлена с использованием резистора 144 и переменного резистора 146. Частота выходного сигнала, предоставляемого микропроцессору 24, относится к движению технологического компонента. Например, если технологический компонент 106 содержит расширение, как изображенное на Фиг. 2, то, когда расширение движется в и из поля обзора датчика 120, схема 102 обработки предоставляет импульсный выходной сигнал микропроцессору 24. Эти импульсы находятся на частоте колебательных движений тела 40 вихреобразования и, тем самым, соотносятся с расходом.
[00029] Фиг. 7 является упрощенной блочной диаграммой другого примера осуществления устройства 100 захвата изображения. В осуществлении на Фиг. 7, устройство 100 содержит решетку датчиков 120-1…120-N. Эта решетка, например, может быть одномерной линейной (линейный сканер) решеткой или двумерной матрицей (растровой). Как изображено на Фиг. 7, свет или другое электромагнитное излучение 104 от компонента 106 направлены на решетку, где активируются различные датчики 120. Схема 102 обработки принимает информацию, относящуюся к интенсивности излучения, принятого каждым из датчиков 120. В одной конфигурации, каждый из датчиков 120 просто предоставляет выходной сигнал, если электромагнитное излучение 104 превышает порог. В другой конфигурации, выходной сигнал от каждого из датчиков 120 указывает величину принятого излучения. В другом примере, выходной сигнал от каждого из датчиков 120 относится к длине волны принятого излучения. Таким образом, величина и/или длина волны принятого излучения 104 может быть использована для обнаружения относительного движения технологического компонента 106 и, тем самым, соотнесена с технологическим параметром. Выходной сигнал предоставляет микропроцессору 24 по схеме 102 обработки, которая может содержать аналого-цифровой преобразователь или другую схему обработки изображения.
[00030] Схема 120 обработки или микропроцессор 24 может обнаруживать движение на основании изменений в изображении, например, на основании сравнения с порогом или относительного сравнения между различными участками в захваченном изображении. В другом примере конфигурации, базовое изображение хранится в запоминающем устройстве 26. Изменения в захваченном изображении по отношению к базовому изображению обнаруживают и используют для считывания движения технологического компонента 106. Обнаружение движения технологического компонента 106 может быть основано на выходных сигналах от одного или нескольких отдельных датчиков (пикселов) или может зависеть от взаимоотношений между выходными сигналами множества датчиков. Сравнение выходных сигналов датчиков может быть использовано для помощи в сокращении ошибочных измерений вследствие фонового шума, условий окружающего света и так далее.
[00031] Хотя выше описано измерение частоты или величины вихревого потока, другие технологические параметры также могут быть измерены. Например, уровень текучей среды может быть измерен с помощью технологического компонента 106, выполненного в качестве плавающего тела, которое плавает в технологической текучей среде в контейнере. Положение компонента 106 относится к уровню текучей среды. Положение плавающего тела может быть обнаружено путем захвата изображения и нахождения положения плавающего тела на изображении путем мониторинга изменений в изображении, по мере того как плавающее тело движется вверх и вниз вместе с уровнем текучей среды. В другом примере, положение может быть обнаружено путем обеспечения компонента 106 отражательной способностью, которая меняется вдоль его поверхности. Изменения в отражательной способности приведут к тому, что количество отраженного излучения 104, которое достигает устройства 100, изменяется, по мере того как компонент 106 движется относительно уровня текучей среды. Эти изменения амплитуды считываются устройством 100 и зависят от уровня текучей среды. Подобным образом, цветовые изменения могут быть обеспечены вдоль поверхности технологического компонента 106, которые могут быть обнаружены устройством 100 обнаружения и соотнесены с движением технологического компонента 106. Текстурирование технологического компонента 106 также может быть использовано для улучшения обнаружения движения.
[00032] Другие типы механического движения могут быть обнаружены и использованы для измерения технологических параметров. Такое движение включает в себя движение от двигателей, микшеров, клапанов, приводов, вибраторов, лифтов и так далее. Если компонент 106 вращается, то технологические параметры, как, например, скорость (RPM) и угловое положение, могут быть определены на основании наблюдаемого движения. Движение вследствие механического расширения или сжатия также может быть обнаружено и использовано для измерения давления, температуры или изменений уровня. Пример движения повторяющейся природы, который может быть использован для получения технологического параметра, включает в себя движение вследствие потока, проходящего через тело вихревого обтекания, или вследствие эффекта Кориолиса. Движение вследствие вибраций может наблюдаться и быть использовано для определения технологического параметра. В другом примере, наблюдают за изменениями в форме бака-хранилища и соотносят их с уровнем заполненности бака образом, подобным градуировочной таблице вместимости. Подобным образом, давление можно определить путем обнаружения движения вследствие деформации насоса, выступающего в качестве манометрической трубки Бурдона. Еще в другом примере осуществления, обнаруживают движение технологического компонента, которое происходит вследствие примененного веса или силы. В такой конфигурации, величина примененной силы или величина примененного веса относится к количеству движения технологического компонента. Например, вес или сила, примененная к концу вытянутой арматуры, приведет к движению конца вытянутой арматуры. Количество движения относится к примененному весу или силе и жесткости арматуры. В другом примере, технологический компонент с большим коэффициентом температуры может быть использован для измерения температуры, по мере того как компонент расширяется или сокращается в зависимости от температуры.
[00033] Движение компонента 106 может быть усилено, или, иначе, величина его сигнала увеличена с использованием соответственных способов. Например, механическое расширение на элементе выступает в качестве плеча рычага для увеличения количества движения. Способы могут быть использованы для улучшения обнаружения движения, включая использование различных цветов поверхности или изменений в текстуре поверхности. Чтобы сократить шум, который может привести к неправильному обнаружению движения, контрольные отметки или другие указатели могут быть обеспечены на поверхности. Толщина стен или других компонентов может быть сокращена, чтобы, тем самым, увеличить количество их движения (отклонения или деформации), когда применяется сила. Опциональная система 130 линз может обеспечить увеличение или фильтрацию изображения.
[00034] Сигнал от технологического компонента 106 передается по электромагнитным волнам 104 к устройству 100 захвата изображения. Любой диапазон соответственной частоты (колебаний) может быть использован как соответственный, включая инфракрасное, видимое и/или ультрафиолетовое излучение. Опциональный источник 200 излучения, изображенный на Фиг. 7, направляет свет или другое электромагнитное излучение 202 на компонент 106. Источник 200 излучения может быть использован, когда окружающее излучение слишком низкое для достаточного освещения технологического компонента 106 для захвата изображения устройством 100. Источник 200 излучения опционально работает под управлением микропроцессора 24 или другой схемы. Это управление может быть использовано, например, для сокращения мощности, обеспеченной источнику 200 излучения во время периодов простоя или во время периодов, в которые не требуется большое количество освещения технологического компонента. В другом примере конфигурации, можно выбирать частоту излучения 202, обеспеченного источником 200 излучения. Это можно использовать для освещения технологического компонента излучением, которое отличается от частоты окружающего света или другого электромагнитного излучения, чтобы сократить шум в принятом изображении. В другом примере конфигурации, технологические компоненты 106 различного цвета могут быть выборочно захвачены путем изменения частоты излучения 202. Это позволяет получить множество технологических параметров от одного устройства захвата изображения.
[00035] Устройство захвата изображения может содержать любое подходящее устройство обнаружения изображения или решетку, включая нульмерное (датчик с единичным пикселем), линейное (одномерная решетка), растровое (двумерная решетка) или кубическое (трехмерная решетка). Дополнительно, комбинации этих различных типов решеток могут также быть осуществлены. Устройство 100 захвата изображения может быть осуществлено с использованием стандартной технологии видеокамеры или других технологий, включая инфракрасные камеры и так далее. В некоторых конфигурациях, одно устройство 100 захвата изображения может быть использовано для захвата изображений множества компонентов для обнаружения их движения и, тем самым, определения множества технологических параметров.
[00036] Как только изображение было захвачено, схема 102 обработки или микропроцессор 24 может выполнить дополнительные вычисления на захваченном изображении. Примеры способов обработки сигнала включают в себя использование быстрого преобразования (FFT) Фурье для обработки изображения для получения информации о частоте, использование производных или тому подобного для идентификации движения в изображении, способы цифровой фильтрации для сокращения шума и способы усиления амплитуды для увеличения чувствительности. Способы подавления помех также могут быть использованы для сокращения ошибочных считываний. Диагностические алгоритмы могут идентифицировать поврежденный компонент или другое диагностическое условие в процессе. Диагностический алгоритм также может обнаруживать поврежденные компоненты в самом устройстве захвата изображения, как, например, поврежденные пикселы.
[00037] Способы могут быть использованы для увеличения разрешения устройства захвата изображения. Например, интересуемые участки, как, например, участки, где происходит изменение, могут быть сканированы с более высокой скоростью, чем участки в изображении, где не происходит никаких изменений. Необходимо отметить, что устройство захвата изображения, которое используется для захвата движения, должно быть достаточно стабильно, чтобы его собственное движение вследствие вибраций или тому подобного не приводило к ошибкам в измерении.
[00038] В вышеприведенном описании, сделана ссылка для получения изображений технологического компонента, который движется, однако описание применимо к относительному движению вследствие движения технологического компонента. Более конкретно, в вышеуказанном описании, устройство захвата изображения предоставляет опорное местоположение, из которого наблюдают за движением технологического компонента. В другом примере конфигурации, устройство 100 захвата изображения перемещается вместе с технологическим компонентом 106 и захватывает изображение опорного элемента. Например, на Фиг. 8, изображено, что технологический компонент 106 несет на себе устройство 100. Устройство 100 захвата изображения расположено для наблюдения за опорным изображением 220, находящимся на опорной стойке 222. По мере движения технологического компонента 106 устройство 100 захвата изображения движется вместе с ним. Это движение можно наблюдать путем просмотра опорного элемента 220 с помощью устройства 100. Опорный элемент 220 может включать в себя различные способы улучшения изображения, описанные выше по отношению к технологическому компоненту. Так как обнаруживают относительное движение, то в некоторых конфигурациях может быть желательно для устройства захвата изображения, технологического компонента и/или опорного элемента быть прикрепленным к одной и той же опорной раме, чтобы движение, вызванное окружающими вибрациями и так далее, не было обнаружено.
[00039] Измеренный технологический параметр может быть передан по любому подходящему контуру управления обработкой и связан с системой управления, как желательно. Это позволяет стандартным системам управления и мониторинга использовать устройство 100 захвата изображения, включая систему безопасности по уровню или тому подобное. Использование устройства 100 захвата изображения обеспечивает ряд преимуществ по сравнению со многими конкурирующими технологиями, включая менее инвазивную конфигурацию, низкие издержки, упрощенную установку и ограниченную конфигурацию пользователя.
[00040] Хотя настоящее изобретение было описано со ссылкой на предпочтительные осуществления, специалистам в данной области техники будут очевидны изменения, которые могут быть сделаны в форме и деталях, без удаления от сущности и объема изобретения. Хотя термин «изображение» использован в настоящей заявке, настоящее изобретение может использовать любую подходящую частоту или излучение диапазона частот. Это включает в себя видимый свет, инфракрасное и ультрафиолетовое излучение. В общих аспектах, технологический параметр измеряют с использованием относительного движения технологического компонента. Это включает в себя наблюдение за происходящим движением, в котором количество или манера движения относится к технологическому параметру, движением, в котором частота или скорость движения относится к технологическому параметру, а также конфигурации, в которых форма или контуры технологического компонента меняются в зависимости от технологического параметра, среди прочих. Как использовано в настоящей заявке, термин «движение» включает в себя движение типа перемещения, деформацию или изменения формы, вибрации, повторяющееся движение, линейное или нелинейное движение и так далее. Величина технологического параметра может быть соотнесена с обнаруженным движением с использованием эмпирических способов или способов моделирования, как желательно. Однако может быть использован любой подходящий способ, включая, например, нейронные сети или тому подобное.





Изобретение относится к управлению технологическим процессом. Полевое устройство для мониторинга технологического параметра текучей среды промышленного процесса содержит технологический компонент, который представляет относительное движение в зависимости от технологического параметра, устройство захвата изображения, которое изменяется вследствие относительного движения технологического компонента, и процессор обработки изображения, соединенный с устройством захвата изображения. Процессор обнаруживает относительное движение технологического компонента на основании захваченного изображения и измеряет технологический параметр на основании обнаруженного относительного движения. Выходная схема, соединенная с процессором обработки изображения, предоставляет выходной сигнал, относящийся к измеренному технологическому параметру. Повышается точность мониторинга. 2 н. и 24 з.п. ф-лы, 8 ил.
1. Полевое устройство для мониторинга технологического параметра текучей среды промышленного процесса, содержащее:
технологический компонент, который представляет относительное движение в зависимости от технологического параметра;
устройство захвата изображения, выполненное с возможностью захватывать изображение, которое изменяется вследствие относительного движения технологического компонента;
процессор обработки изображения, соединенный с устройством захвата изображения, выполненный с возможностью:
обнаруживать относительное движение технологического компонента на основании захваченного изображения и
измерять технологический параметр на основании обнаруженного относительного движения; и
выходную схему, соединенную с процессором обработки изображения, выполненную с возможностью предоставлять выходной сигнал, относящийся к измеренному технологическому параметру.
2. Полевое устройство по п. 1, в котором относительное движение содержит перемещение технологического компонента.
3. Полевое устройство по п. 1, в котором относительное движение содержит деформацию технологического компонента.
4. Полевое устройство по п. 1, в котором относительное движение содержит повторяющееся движение технологического компонента.
5. Полевое устройство по п. 1, в котором обнаруженное движение содержит частоту относительного движения.
6. Полевое устройство по п. 1, в котором обнаруженное движение содержит амплитуду относительного движения.
7. Полевое устройство по п. 1, в котором технологический параметр выбран из группы технологических параметров, состоящей из давления, температуры, расхода, уровня, скорости, массы и положения.
8. Полевое устройство по п. 1, включающее в себя источник излучения, выполненный с возможностью освещать технологический компонент, и в котором устройство захвата изображения принимает изображение технологического компонента, освещенного источником излучения.
9. Полевое устройство по п. 1, в котором устройство захвата изображения содержит датчик с единичным пикселем.
10. Полевое устройство по п. 1, в котором устройство захвата изображения содержит датчик линейного сканирования.
11. Полевое устройство по п. 1, в котором устройство захвата изображения содержит двумерную решетку.
12. Полевое устройство по п. 1, в котором процессор обработки изображения дополнительно выполнен с возможностью выполнять диагностику промышленного процесса на основании захваченного изображения.
13. Полевое устройство по п. 1, включающее в себя запоминающее устройство, выполненное с возможностью хранить базовое изображение для использования процессором обработки изображения при обнаружении относительного движения технологического компонента.
14. Полевое устройство по п. 1, в котором устройство захвата изображения захватывает изображение технологического компонента.
15. Полевое устройство по п. 1, в котором устройство захвата изображения перемещается с технологическим компонентом и захватывает изображение опорного элемента.
16. Полевое устройство по п. 1, включающее в себя элемент управления, используемый для управления промышленным процессом на основании сигнала управления, и в котором сигнал управления зависит от выходного сигнала, относящегося к измеренному технологическому параметру.
17. Способ мониторинга технологического параметра текучей среды промышленного процесса с использованием полевого устройства, содержащий этапы, на которых:
размещают технологический компонент в промышленном процессе, который представляет относительное движение в зависимости от технологического параметра;
захватывают изображение, которое изменяется вследствие относительного движения технологического компонента, причем относительное движение относится к технологическому параметру;
обнаруживают относительное движение технологического компонента в захваченном изображении;
измеряют технологический параметр на основании обнаруженного относительного движения и
в ответ предоставляют выходной сигнал, относящийся к технологическому параметру.
18. Способ по п. 17, в котором относительное движение содержит перемещение технологического компонента.
19. Способ по п. 17, в котором относительное движение содержит деформацию технологического компонента.
20. Способ по п. 17, в котором относительное движение содержит повторяющееся движение технологического компонента.
21. Способ по п. 17, в котором обнаруженное относительное движение содержит частоту в захваченном изображении.
22. Способ по п. 17, в котором обнаруженное движение содержит амплитуду в захваченном изображении.
23. Способ по п. 17, в котором технологический параметр выбирают из группы технологических параметров, состоящей из давления, температуры, расхода, уровня, скорости, массы и положения.
24. Способ по п. 17, включающий в себя освещение технологического компонента с помощью источника излучения.
25. Способ по п. 17, включающий в себя выполнение диагностики промышленного процесса на основании захваченного изображения.
26. Способ по п. 17, включающий в себя сохранение базового изображения в запоминающем устройстве для использования в обнаружении относительного движения технологического компонента.
| US 5056046 A, 08.10.1991 | |||
| WO 2009074708 A1, 18.06.2009 | |||
| US 2007073439 A1, 29.03.2007 | |||
| US 2010220180 A1, 02.09.2010. |

