Область техники, к которой относится изобретение
[0001] Настоящее раскрытие сущности относится к устройству управления рулением из системы рулевого управления по проводам, в которой руль и управляемые колеса механически отделены друг от друга.
Уровень техники
[0002] В качестве технологии устройства управления рулением, например, приводится патентный документ 1 для одной технологии.
В PLT 1, двигатель для формирования силы реакции приводится в действие на основе величины управления силы реакции при рулении на основе угла поворота при рулении и величины управления, вычисленной посредством умножения электрического тока двигателя рулевого управления на заданное усиление. Таким образом, в PLT 1, влияние внешней силы, оказываемое на управляемые колеса, отражается на силе реакции при рулении.
Список библиографических ссылок
Патентные документы
[0003] PLT 1. JP 2000-108914 A
Сущность изобретения
Техническая задача
[0004] Тем не менее, в вышеописанной технологии, двигатель для формирования силы реакции приводится в действие на основе величины управления силы реакции при рулении на основе угла поворота при рулении и величины управления, вычисленной посредством умножения электрического тока двигателя рулевого управления на заданное усиление. Следовательно, в вышеописанной технологии, например, в случае если точность величины управления силы реакции при рулении на основе угла поворота при рулении ухудшается, имеется вероятность того, что сила реакции при рулении является ненадлежащей.
Настоящее раскрытие сущности осуществлено с учетом вышеизложенных обстоятельств и имеет задачу обеспечить возможность приложения более надлежащей силы реакции при рулении.
Решение задачи
[0005] Чтобы решить вышеуказанную задачу, в одном варианте осуществления настоящего раскрытия сущности, осевая сила прямой связи и осевая сила обратной связи распределяются с коэффициентом распределения, чтобы задавать конечную осевую силу. Затем в одном варианте осуществления раскрытия сущности, реакция при рулении прикладывается на основе конечной осевой силы, которая задана. В этом случае, когда существует разность осевых сил между осевой силой прямой связи и осевой силой обратной связи, коэффициент распределения осевой силы прямой связи делается меньше, в случае, когда абсолютное значение разности осевых сил равно или больше предварительно заданного значения, чем коэффициент распределения в случае, когда абсолютное значение разности осевых сил меньше предварительно заданного значения.
Преимущества изобретения
[0006] В одном варианте осуществления настоящего раскрытия сущности, поскольку осевая сила прямой связи и осевая сила обратной связи распределяются с коэффициентом распределения на основе разности осевых сил, ускорения в поперечном направлении, скорости транспортного средства, угла поворота при рулении и угловой скорости руления, можно смешивать осевую силу прямой связи и осевую силу обратной связи более надлежащим способом.
Соответственно, в одном варианте осуществления раскрытия сущности, может прикладываться более надлежащая сила реакции при рулении.
Краткое описание чертежей
[0007] Фиг. 1 является концептуальным видом, иллюстрирующим конфигурацию транспортного средства A;
Фиг. 2 является блок-схемой, иллюстрирующей конфигурацию модуля 11 вычисления параметров управления;
Фиг. 3 является блок-схемой, иллюстрирующей конфигурацию модуля 11B вычисления целевого тока силы реакции;
Фиг. 4 является блок-схемой, иллюстрирующей конфигурацию модуля 11Ba вычисления осевой силы прямой связи;
Фиг. 5 является видом, иллюстрирующим коэффициенты в выражении для вычисления осевой силы Th ведущей шестерни;
Фиг. 6 является графиком, представляющим карту M1 управления;
Фиг. 7 является графиком, представляющим карту M2 управления;
Фиг. 8 является графиком, представляющим взаимосвязь между углом δ поворота при рулении и силой реакции при рулении.
Фиг. 9 является графиком, представляющим карту M3 управления;
Фиг. 10 является графиком, представляющим карту M4 управления;
Фиг. 11 является блок-схемой, иллюстрирующей конфигурацию модуля 11Bb вычисления осевой силы обратной связи;
Фиг. 12 является графиком, представляющим осевую силу поперечного G, осевую силу электрического тока, осевую силу угловой скорости рыскания и фактическую осевую силу рулевой зубчатой рейки;
Фиг. 13 является графиком, представляющим смешанную осевую силу TBR и фактическую осевую силу рулевой зубчатой рейки.
Фиг. 14 является графиком, представляющим карту M5 управления;
Фиг. 15 является графиком, представляющим карту M6 управления;
Фиг. 16 является графиком, представляющим карту M7 управления;
Фиг. 17A и фиг. 17B являются графиками, представляющими карты M8a и M8b управления;
Фиг. 18 является графиком, представляющим карту M9 управления;
Фиг. 19 является графиком, представляющим карту M10 управления.
Описание вариантов осуществления
[0008] Далее описываются варианты осуществления настоящего раскрытия сущности со ссылками на чертежи.
Конфигурация
Транспортное средство A представляет собой транспортное средство, включающее в себя устройство управления рулением из системы рулевого управления по проводам, в которой руль 1 и передние колеса 2 (в дальнейшем в этом документе, также называемые "управляемыми колесами") механически отделены, в одном варианте осуществления настоящего раскрытия сущности.
Фиг. 1 является концептуальным видом, иллюстрирующим конфигурацию транспортного средства A в одном варианте осуществления настоящего раскрытия сущности.
Как проиллюстрировано на фиг. 1, транспортное средство A выполнено с возможностью включать в себя датчик 3 угла поворота при рулении, датчик 4 угла поворота, датчик 5 скорости транспортного средства, датчик 6 поперечного G, датчик 7 угловой скорости рыскания и датчик 12 позиции переключения коробки передач.
Датчик 3 угла поворота при рулении выполнен с возможностью обнаруживать угол δ поворота при рулении руля 1. В качестве способа обнаружения угла δ поворота при рулении может использоваться, например, способ вычисления угла на основе величины поворота рулевого вала. Затем датчик 3 угла поворота при рулении выполнен с возможностью выводить сигнал (в дальнейшем в этом документе, также называемый "сигналом обнаружения"), представляющий результат обнаружения, в модуль 11 вычисления параметров управления, который описывается ниже.
[0009] Датчик 4 угла поворота выполнен с возможностью обнаруживать угол θ поворота управляемых колес 2. В качестве способа обнаружения угла θ поворота может использоваться, например, способ вычисления угла на основе величины перемещения зубчатой рейки для рулевой зубчатой рейки. Затем датчик 4 угла выполнен с возможностью выводить сигнал обнаружения в модуль 11 вычисления параметров управления.
Датчик 5 скорости транспортного средства выполнен с возможностью обнаруживать скорость V транспортного средства для транспортного средства A. Затем датчик 5 скорости транспортного средства выполнен с возможностью выводить сигнал обнаружения в модуль 11 вычисления параметров управления.
Датчик 6 поперечного G выполнен с возможностью обнаруживать поперечное ускорение Gy, которое должно прикладываться к транспортному средству A (величину, характеризующую состояние транспортного средства A, которая изменяется в зависимости от поперечной силы Fd на шинах, прикладываемой к управляемым колесам 2). Затем датчик 6 поперечного G выполнен с возможностью выводить сигнал обнаружения в модуль 11 вычисления параметров управления.
Датчик 7 угловой скорости рыскания выполнен с возможностью обнаруживать угловую скорость γ рыскания транспортного средства A (величину, характеризующую состояние транспортного средства A, которая изменяется в зависимости от поперечной силы Fd на шинах, прикладываемой к управляемым колесам 2). Затем датчик 7 угловой скорости рыскания выполнен с возможностью выводить сигнал обнаружения в модуль 11 вычисления параметров управления.
Следует отметить, что датчик 6 поперечного G и датчик 7 угловой скорости рыскания размещаются в пружине (кузове транспортного средства).
Датчик 12 позиции переключения коробки передач выполнен с возможностью определять позицию рычага переключения передач на коробке передач. В качестве позиции рычага переключения передач, например, включены D-диапазон, R-диапазон (позиция движения задним ходом) и P-диапазон. Затем датчик 12 позиции переключения коробки передач выполнен с возможностью выводить сигнал обнаружения в модуль 11 вычисления параметров управления.
[0010] Помимо этого, транспортное средство A выполнено с возможностью включать в себя модуль 8 управления при повороте и модуль 9 управления силой реакции.
Модуль 8 управления при повороте выполнен с возможностью включать в себя поворотный двигатель 8A, модуль 8B обнаружения тока при повороте и модуль 8C приведения в действие поворотного двигателя.
Поворотный двигатель 8A соединяется с валом 10 шестерни через редуктор. Затем поворотный двигатель 8A приводится в действие посредством модуля 8C приведения в действие поворотного двигателя, чтобы перемещать рулевую зубчатую рейку влево или вправо через вал 10 шестерни. Таким образом, поворотный двигатель 8A поворачивает управляемые колеса 2. В качестве способа приведения в действие поворотного двигателя 8A может использоваться, например, способ управления электрическим током, протекающим через поворотный двигатель 8A (в дальнейшем в этом документе, также называемым "электрическим током при повороте").
[0011] Модуль 8B обнаружения тока при повороте выполнен с возможностью обнаруживать электрический ток при повороте (величину, характеризующую состояние транспортного средства A, которая изменяется в зависимости от поперечной силы Fd на шинах, прикладываемой к управляемым колесам 2). Затем модуль 8B обнаружения тока при повороте выполнен с возможностью выводить сигнал обнаружения в модуль 8C приведения в действие поворотного двигателя и модуль 11 вычисления параметров управления.
Модуль 8C приведения в действие поворотного двигателя выполнен с возможностью управлять электрическим током при повороте поворотного двигателя 8A на основе целевого электрического тока при повороте, вычисленного посредством модуля 11 вычисления параметров управления, так что электрическим ток при повороте, обнаруженный посредством модуля 8B обнаружения тока при повороте, соответствует целевому электрическому току при повороте. Таким образом, модуль 8C приведения в действие поворотного двигателя приводит в действие поворотный двигатель 8A. Целевой электрический ток при повороте является целевым значением электрического тока, протекающего через поворотный двигатель 8A.
[0012] Модуль 9 управления силой реакции выполнен с возможностью включать в себя двигатель 9A для формирования силы реакции, модуль 9B обнаружения тока силы реакции и модуль 9C приведения в действие двигателя для формирования силы реакции.
Двигатель 9A для формирования силы реакции соединяется с рулевым валом через редуктор. Затем двигатель 9A для формирования силы реакции приводится в действие посредством модуля 9C приведения в действие двигателя для формирования силы реакции для того, чтобы прикладывать вращательный крутящий момент к рулю 1 через рулевой вал. Соответственно, двигатель 9A для формирования силы реакции формирует силу реакции при рулении. В качестве способа приведения в действие двигателя 9A для формирования силы реакции может использоваться, например, способ управления электрическим током, протекающим через двигатель 9A для формирования силы реакции (в дальнейшем в этом документе, также называемым "электрическим током силы реакции").
Модуль 9B обнаружения тока силы реакции выполнен с возможностью обнаруживать электрический ток силы реакции. Затем модуль 9B обнаружения тока силы реакции выполнен с возможностью выводить сигнал обнаружения в модуль 9C приведения в действие двигателя для формирования силы реакции и модуль 11 вычисления параметров управления.
Модуль 9C приведения в действие двигателя для формирования силы реакции выполнен с возможностью управлять электрическим током силы реакции двигателя 9A для формирования силы реакции на основе целевого электрического тока силы реакции, вычисленного посредством модуля 11 вычисления параметров управления, так что электрический ток силы реакции, обнаруженный посредством модуля 9B обнаружения тока силы реакции, соответствует целевому электрическому току силы реакции. Соответственно, модуль 9C приведения в действие двигателя для формирования силы реакции приводит в действие двигатель 9A для формирования силы реакции. Целевой электрический ток силы реакции является целевым значением тока, протекающего через двигатель 9A для формирования силы реакции.
[0013] Помимо этого, транспортное средство A включает в себя модуль 11 вычисления параметров управления.
Фиг. 2 является блок-схемой, иллюстрирующей конфигурацию модуля 11 вычисления параметров управления.
Как проиллюстрировано на фиг. 2, модуль 11 вычисления параметров управления выполнен с возможностью включать в себя модуль 11A вычисления целевого угла поворота, модуль 11B вычисления целевого тока силы реакции и модуль 11C вычисления целевого тока при повороте.
Модуль 11A вычисления целевого угла поворота выполнен с возможностью вычислять целевой угол θ* поворота, который является целевым значением угла θ поворота (угла поворота вала 10 шестерни), на основе угла δ поворота при рулении, обнаруженного посредством датчика 3 угла поворота при рулении, и скорости V транспортного средства, обнаруженной посредством датчика 5 скорости транспортного средства. В качестве способа вычисления целевого угла θ* поворота, например, предусмотрен способ использования значения умножения, полученного посредством умножения угла δ поворота при рулении на регулируемое передаточное отношение угла δ поворота при рулении и угла θ поворота. Затем модуль 11A вычисления целевого угла поворота выполнен с возможностью выводить результат вычисления в модуль 11B вычисления целевого тока силы реакции.
Модуль 11B вычисления целевого тока силы реакции выполнен с возможностью вычислять целевой электрический ток силы реакции на основе целевого поворота θ*, вычисленного посредством модуля 11A вычисления целевого угла поворота, скорости V транспортного средства, обнаруженной посредством датчика 5 скорости транспортного средства, и электрического тока при повороте, обнаруженного посредством модуля 8B обнаружения тока при повороте. Затем модуль 11B вычисления целевого тока силы реакции выполнен с возможностью выводить результат вычисления в модуль 9 управления силой реакции (модуль 9C приведения в действие двигателя для формирования силы реакции).
[0014] Здесь описывается конфигурация модуля 11B вычисления целевого тока силы реакции.
Фиг. 3 является блок-схемой, иллюстрирующей конфигурацию модуля 11B вычисления целевого тока силы реакции.
Как проиллюстрировано на фиг. 3, модуль 11B вычисления целевого тока силы реакции выполнен с возможностью включать в себя модуль 11Ba вычисления осевой силы прямой связи, модуль 11Bb вычисления осевой силы обратной связи, модуль 11Bf коррекции осевой силы обратной связи, модуль 11Bc вычисления конечной осевой силы, модуль 11Bd преобразования силы реакции при рулении и осевой силы и модуль 11Be вычисления целевого тока силы реакции.
Фиг. 4 является блок-схемой, иллюстрирующей конфигурацию модуля 11Ba вычисления осевой силы прямой связи.
Как проиллюстрировано на фиг. 4, модуль 11Ba вычисления осевой силы прямой связи выполнен с возможностью вычислять силу реакции при рулении в качестве осевой силы TFF прямой связи согласно выражению (5), которое описывается ниже, на основе угла δ поворота при рулении, обнаруженного посредством датчика 3 угла поворота при рулении, и скорости V транспортного средства, обнаруженной посредством датчика 5 скорости транспортного средства. Затем модуль 11Ba вычисления осевой силы прямой связи выполнен с возможностью выводить результат вычисления в модуль 11Bc вычисления конечной осевой силы (см. фиг. 2).
[0015] Фиг. 5 является видом, иллюстрирующим коэффициенты в выражении для вычисления осевой силы Th ведущей шестерни.
Здесь, выражение отношения между углом θ поворота шестерни и осевой силой Th ведущей шестерни представлено посредством следующего выражения (1) на основе уравнения движения транспортного средства, включающего в себя механизм рулевого управления, в котором руль 1 и управляемые колеса 2 механически соединены. В качестве угла θ поворота шестерни вала, в качестве примера предоставляется угол поворота вала 10 шестерни. Конкретно, угол θ поворота шестерни задается равным значению умножения, полученному посредством умножения угла δ поворота при рулении и регулируемого передаточного отношения угла δ поворота при рулении и угла θ поворота. Кроме того, в качестве осевой силы Th ведущей шестерни, в качестве примера предоставляется сила реакции при рулении, прикладываемая к рулю 1. Первый элемент в правой части следующего выражения (1) представляет собой демпфирующий элемент, представляющий компонент на основе угловой скорости dθ/dt поворота шестерни в компонентах, включенных в осевую силу Th ведущей шестерни. Помимо этого, второй элемент в правой части представляет собой инерционный элемент, представляющий компонент на основе углового ускорения d2θ/dt2 поворота шестерни в компонентах, включенных в осевую силу Th ведущей шестерни. Дополнительно, третий элемент в правой части представляет собой пропорциональный элемент, представляющий компонент на основе поперечной силы Fd на шинах (угла θ поворота шестерни) в компонентах, включенных в осевую силу Th ведущей шестерни.
[0016]

Как проиллюстрировано на фиг. 5, Ks представляет жесткость ведущей шестерни, Cs представляет вязкость ведущей шестерни, Jr представляет инерцию зубчатой рейки, и Cr представляет вязкость зубчатой рейки.
Помимо этого, в вышеприведенном выражении (1), второй элемент в правой части, который представляет собой инерционный элемент, и включает в себя множество компонентов шума и они должны удаляться, поскольку они приводят к колебанию для результата вычисления осевой силы Th ведущей шестерни. Кроме того, поперечная сила Fd на шинах может быть представлена посредством Fd=f(V)*θ в качестве элемента в зависимости от угла θ поворота шестерни и скорости V транспортного средства. В качестве f(V), например, предусмотрена функция, которая изменяется в зависимости от скорости V транспортного средства. Соответственно, выражение (1) может быть представлено посредством следующего выражения (2).

[0017] Фиг. 6 является графиком, представляющим карту M1 управления.
Здесь, в качестве способа задания переменной f(V) может использоваться, например, способ считывания переменной f(V), соответствующей абсолютному значению скорости V транспортного средства, из карты M1 управления. В качестве карты M1 управления, в качестве примера предоставляется карта, в которой зарегистрированы переменные f(V), соответствующие абсолютным значениям скоростей V транспортного средства. Конкретно, как проиллюстрировано на фиг. 6, на карте M1 управления, когда абсолютное значение скорости V транспортного средства равно 0, переменная f(V) задается равной первому заданному значению (например, 0,0). Кроме того, в диапазоне, в котором абсолютное значение скорости V транспортного средства равно или превышает первую заданную скорость V1 транспортного средства (>0), переменная f(V) задается равной второму заданному значению (>первого заданного значения, например, 1,0) независимо от абсолютной величины скорости V транспортного средства. Кроме того, на карте M1 управления, в диапазоне, в котором абсолютное значение скорости V транспортного средства равно или превышает 0 и меньше первой заданной скорости V1 транспортного средства, переменная f(V) линейно увеличивается согласно абсолютному значению угловой скорости dθ/dt поворота. Конкретно, на карте M1 управления, в диапазоне, в котором абсолютное значение скорости V транспортного средства равно или превышает 0 и меньше первой заданной скорости V1 транспортного средства, переменная f(V) задается согласно линейной функции, представляющей взаимосвязь между абсолютным значением скорости V транспортного средства и переменной f(V). В линейной функции, когда абсолютное значение скорости V транспортного средства равно 0, переменная f(V) задается равной первому заданному значению (0,0), тогда как, когда абсолютное значение скорости V транспортного средства составляет первую заданную скорость V1 транспортного средства, переменная f(V) задается равной второму заданному значению (1,0). Соответственно, когда абсолютное значение скорости V транспортного средства меньше первой заданной скорости V1 транспортного средства, модуль 11Ba вычисления осевой силы прямой связи задает меньшим (уменьшает) абсолютное значение пропорционального компонента по мере того, как становится меньше абсолютное значение скорости V транспортного средства. Помимо этого, когда абсолютное значение скорости V транспортного средства равно или превышает первую заданную скорость V1 транспортного средства, модуль 11Ba вычисления осевой силы прямой связи не уменьшает абсолютное значение пропорционального компонента независимо от абсолютной величины скорости V транспортного средства.
[0018] Дополнительно, выражение (2) эквивалентно может представляться как следующее выражение (3)
где P и I представляют параметры управления, ζ представляет коэффициент демпфирования, и ωn представляет собственную частоту. В качестве способа задания ζ и ωn, например, могут использоваться способ задания с помощью расчетного значения или способ идентификации из экспериментального результата.
Следовательно, осевая сила Th ведущей шестерни, которая представляет собой силу реакции при рулении, сформированную в руле 1, может быть представлена посредством следующего выражения (4) на основе выражения (3)

[0019] Затем в качестве способа вычисления осевой силы TFF прямой связи на основе вышеприведенного выражения (4), которое является арифметическим выражением осевой силы Th ведущей шестерни, в одном варианте осуществления настоящего раскрытия сущности, используется следующее выражение (5).
TFF=P*P1*P2(s+2*ζ*ωn)/(s2+2*ζ*ωn*s+ωn2)dδ/dt+I*(s+2*ζ*ωn)/(s2+2*ζ*ωn*s+ωn2)*f(V)*δ + демпфирующий компонент для коррекции
= демпфирующий компонент * P1/P2+пропорциональный компонент+демпфирующий компонент для коррекции… (5)
Тем не менее, демпфирующий компонент составляет P(s+2*ζ*ωn)/(s2+2*ζ*ωn*s+ωn2)dδ/dt, и пропорциональный компонент составляет I*(s+2*ζ*ωn)/(s2+2*ζ*ωn*s+ωn2)*f(V)*δ. Помимо этого, демпфирующий компонент для коррекции представляет собой демпфирующий компонент на основе угловой скорости dδ/dt руления и формирует силу реакции при рулении в противоположном направлении относительно направления угловой скорости dδ/dt руления.
[0020] Фиг. 7 является графиком, представляющим карту M2 управления.
Здесь, в качестве способа задания усиления P1 может использоваться, например, способ считывания усиления P1, соответствующего абсолютному значению угловой скорости dδ/dt руления, из карты M2 управления. В качестве карты M2 управления, в качестве примера предоставляется карта, в которой зарегистрированы усиления P1, соответствующие абсолютным значениям угловой скорости dδ/dt руления. Конкретно, как проиллюстрировано на фиг. 7, на карте M2 управления, когда угловая скорость dδ/dt руления равна 0, усиление P1 задается равным третьему заданному значению (например, 1,0).
Помимо этого, в диапазоне, в котором абсолютное значение угловой скорости dδ/dt руления равно или превышает первую заданную угловую скорость dδ1/dt руления, усиление P1 задается равным четвертому заданному значению (<третьего заданного значения, например, 0,5) независимо от абсолютной величины угловой скорости dδ/dt руления. Дополнительно, на карте M2 управления, в диапазоне, в котором абсолютное значение угловой скорости dδ/dt руления равно или превышает 0 и меньше первой заданной угловой скорости dδ1/dt руления, усиление P1 линейно уменьшается согласно абсолютному значению угловой скорости dδ/dt руления. Конкретно, на карте M2 управления, в диапазоне, в котором абсолютное значение угловой скорости dδ/dt руления равно или превышает 0 и меньше первой заданной угловой скорости dδ1/dt руления, усиление P1 задается в соответствии с линейной функцией, представляющей взаимосвязь между абсолютным значением угловой скорости dδ/dt руления и усилением P1. В линейной функции усиление P1 задается равным третьему заданному значению (1,0), когда угловая скорость dδ/dt руления равна 0, тогда как усиление P1 задается равным четвертому заданному значению (0,5), когда абсолютное значение угловой скорости dδ/dt руления составляет первую заданную угловую скорость dδ1/dt руления. Соответственно, модуль 11Ba вычисления осевой силы прямой связи задает меньшим (корректирует) абсолютное значение демпфирующего компонента по мере того, как становится больше абсолютное значение угловой скорости dδ/dt руления, когда абсолютное значение угловой скорости dδ/dt руления меньше первой заданной угловой скорости dδ1/dt руления. Дополнительно, модуль 11Ba вычисления осевой силы прямой связи не корректирует абсолютное значение демпфирующего компонента на основе усиления P1 независимо от абсолютной величины угловой скорости dδ/dt руления, когда абсолютное значение угловой скорости dδ/dt руления равно или превышает первую заданную угловую скорость dδ1/dt руления.
[0021] Фиг. 8 является графиком, представляющим взаимосвязь между углом δ поворота при рулении и силой реакции при рулении. Этот график представляет каждое устройство управления рулением (каждое из устройства управления рулением из механической системы, в которой руль 1 и управляемые колеса 2 механически зацепляются, и устройства управления рулением из системы рулевого управления по проводам, в которой не учитывается насыщение демпфирующего компонента). В устройстве управления рулением из механической системы, по мере того, как увеличивается угловая скорость dδ/dt руления, насыщается демпфирующий компонент, включенный в силу реакции при рулении. Соответственно, в устройстве управления рулением из механической системы, как проиллюстрировано на фиг. 8, при насыщении демпфирующего компонента, форма фигуры Лиссажу, включающей в себя угол δ поворота при рулении и силу реакции при рулении, становится постоянной независимо от абсолютной величины угловой скорости dδ/dt руления. Тем не менее, в устройстве управления рулением из системы рулевого управления по проводам, в которой не учитывается насыщение демпфирующего компонента, включенного в силу реакции при рулении, сила реакции при рулении продолжает увеличение согласно увеличению угловой скорости dδ/dt руления. Напротив, модуль 11 вычисления параметров управления в одном варианте осуществления настоящего раскрытия сущности задает меньшим абсолютное значение демпфирующего компонента по мере того, как становится больше абсолютное значение угловой скорости dδ/dt руления. Следовательно, модуль 11 вычисления параметров управления в одном варианте осуществления настоящего раскрытия сущности допускает подавление увеличения абсолютного значения демпфирующего компонента, когда угловая скорость dδ/dt руления является большой. Следовательно, модуль 11 вычисления параметров управления в одном варианте осуществления настоящего раскрытия сущности допускает подавление чрезмерного демпфирующего компонента. Соответственно, модуль 11 вычисления параметров управления в одном варианте осуществления настоящего раскрытия сущности допускает предоставление более надлежащего ощущения при рулении.
[0022] Фиг. 9 является графиком, представляющим карту M3 управления.
Помимо этого, в качестве способа задания усиления P2 может использоваться, например, способ считывания усиления P2, соответствующего абсолютному значению скорости V транспортного средства, из карты M3 управления. В качестве карты M3 управления, в качестве примера предоставляется карта, в которой зарегистрированы усиления P2, соответствующие абсолютным значениям скорости V транспортного средства. Конкретно, как проиллюстрировано на фиг. 9, на карте M3 управления, когда абсолютное значение скорости V транспортного средства равно 0, усиление P2 задается равным пятому заданному значению (например, 0,5). Дополнительно, в диапазоне, в котором абсолютное значение скорости V транспортного средства равно или превышает вторую заданную скорость V2 транспортного средства (>0), усиление P2 задается равным шестому заданному значению (>пятого заданного значения, например, 1,0) независимо от абсолютной величины скорости V транспортного средства. Кроме того, на карте M3 управления, в диапазоне, в котором абсолютное значение скорости V транспортного средства равно или превышает 0 и меньше второй заданной скорости V2 транспортного средства, усиление P2 линейно увеличивается согласно абсолютному значению скорости V транспортного средства. Конкретно, на карте M3 управления, в диапазоне, в котором абсолютное значение скорости V транспортного средства равно или превышает 0 и меньше второй заданной скорости V2 транспортного средства, усиление P2 задается в соответствии с линейной функцией, представляющей взаимосвязь между абсолютным значением скорости V транспортного средства и усилением P2. В линейной функции, когда абсолютное значение скорости V транспортного средства равно 0, усиление P2 задается равным пятому заданному значению (0,5), и когда абсолютное значение скорости V транспортного средства составляет вторую заданную скорость V2 транспортного средства, усиление P2 задается равным шестому заданному значению (1,0). Соответственно, модуль 11Ba вычисления осевой силы прямой связи задает меньшим (корректирует) абсолютное значение демпфирующего компонента по мере того, как становится меньше абсолютное значение скорости V транспортного средства, когда абсолютное значение скорости V транспортного средства меньше второй заданной скорости V2 транспортного средства. Кроме того, модуль 11Ba вычисления осевой силы прямой связи не корректирует абсолютное значение демпфирующего компонента на основе усиления P2 независимо от абсолютной величины скорости V транспортного средства, когда абсолютное значение скорости V транспортного средства равно или превышает вторую заданную скорость V2 транспортного средства.
[0023] Как описано выше, модуль 11 вычисления параметров управления в одном варианте осуществления настоящего раскрытия сущности задает меньшим абсолютное значение демпфирующего компонента по мере того, как становится меньше абсолютное значение скорости V транспортного средства. В данном документе, в устройстве управления рулением из механической системы, в которой руль 1 и управляемые колеса механически зацепляются между собой, когда скорость V транспортного средства уменьшается, поперечная сила Fd на шинах управляемых колес 2 уменьшается, и сила реакции при рулении уменьшается. Напротив, модуль 11 вычисления параметров управления в одном варианте осуществления настоящего раскрытия сущности задает меньшим абсолютное значение демпфирующего компонента по мере того, как становится меньше абсолютное значение скорости V транспортного средства, сила реакции при рулении может снижаться. Соответственно, модуль 11 вычисления параметров управления в одном варианте осуществления настоящего раскрытия сущности допускает предоставление более надлежащего ощущения при рулении.
[0024] Фиг. 10 является графиком, представляющим карту M4 управления.
В качестве способа задания демпфирующего компонента для коррекции может использоваться, например, способ считывания демпфирующего компонента для коррекции, соответствующего абсолютному значению угловой скорости dδ/dt руления, из карты M4 управления. В качестве карты M2 управления, в качестве примера предоставляется карта, в которой зарегистрированы демпфирующие компоненты для коррекции, соответствующие абсолютным значениям угловой скорости dδ/dt руления. Конкретно, как проиллюстрировано на фиг. 10, карта M4 управления задается для каждой скорости V транспортного средства. На каждой карте M4 управления, когда угловая скорость dδ/dt руления равна 0, демпфирующий компонент для коррекции задается равным седьмому заданному значению (например, 0,0). Помимо этого, на карте M4 управления, в диапазоне, в котором абсолютное значение угловой скорости dδ/dt руления равно или превышает вторую заданную угловую скорость dδ2/dt руления (>0), демпфирующий компонент для коррекции задается равным восьмому заданному значению (постоянному значению) независимо от абсолютной величины угловой скорости dδ/dt руления. Дополнительно, на карте M4 управления, в диапазоне, в котором угловая скорость dδ/dt руления равна или превышает 0,0, и абсолютное значение угловой скорости dδ/dt руления меньше третьей заданной угловой скорости dδ3/dt руления (0<dδ3/dt<dδ2/dt), демпфирующий компонент для коррекции линейно увеличивается согласно абсолютному значению угловой скорости dδ/dt руления. В частности, на каждой карте M4 управления, в диапазоне, в котором абсолютное значение угловой скорости dδ/dt руления равно или превышает 0 и меньше третьей заданной угловой скорости dδ3/dt руления, демпфирующий компонент для коррекции задается в соответствии с линейной функцией, представляющей взаимосвязь между абсолютным значением угловой скорости dδ/dt руления и демпфирующим компонентом для коррекции. В линейной функции, когда абсолютное значение угловой скорости dδ/dt руления равно 0, демпфирующий компонент для коррекции задается равным седьмому заданному значению (0,0), тогда как когда абсолютное значение угловой скорости dδ/dt руления составляет третью заданную угловую скорость dδ3/dt руления, демпфирующий компонент для коррекции задается равным девятому заданному значению (0<девятое заданное значение<восьмое заданное значение). Кроме того, на каждой карте M4 управления, в диапазоне, в котором абсолютное значение угловой скорости dδ/dt руления равно или превышает третью заданную угловую скорость dδ3/dt руления и меньше второй заданной угловой скорости dδ2/dt руления, демпфирующий компонент для коррекции линейно увеличивается согласно абсолютному значению угловой скорости dδ/dt руления. Конкретно, на карте M4 управления, в диапазоне, в котором абсолютное значение угловой скорости dδ/dt руления равно или превышает третью заданную угловую скорость dδ3/dt руления и меньше второй заданной угловой скорости dδ2/dt руления, демпфирующий компонент для коррекции задается в соответствии с линейной функцией, представляющей взаимосвязь между абсолютным значением скорости V транспортного средства и демпфирующим компонентом для коррекции. В линейной функции, когда абсолютное значение угловой скорости dδ/dt руления составляет третью заданную угловую скорость dδ3/dt руления, демпфирующий компонент для коррекции задается равным девятому заданному значению, тогда как, когда абсолютное значение угловой скорости dδ/dt руления составляет вторую заданную угловую скорость dδ2/dt руления, демпфирующий компонент для коррекции задается равным восьмому заданному значению. Соответственно, модуль 11Ba вычисления осевой силы прямой связи задает большим абсолютное значение демпфирующего компонента для коррекции по мере того, как становится больше абсолютное значение угловой скорости dδ/dt руления, когда абсолютное значение угловой скорости dδ/dt руления меньше второй заданной угловой скорости dδ2/dt руления. Помимо этого, модуль 11Ba вычисления осевой силы прямой связи задает абсолютное значение демпфирующего компонента для коррекции равным постоянному значению независимо от абсолютной величины угловой скорости dδ/dt руления, когда абсолютное значение угловой скорости dδ/dt руления равно или превышает вторую заданную угловую скорость dδ2/dt руления.
[0025] Как описано выше, модуль 11 вычисления параметров управления в одном варианте осуществления настоящего раскрытия сущности суммирует демпфирующий компонент для коррекции, которым становится большим по мере того, как становится больше абсолютное значение угловой скорости dδ/dt руления, с осевой силой TFF прямой связи. Соответственно, модуль 11 вычисления параметров управления в одном варианте осуществления настоящего раскрытия сущности допускает увеличение инициирования силы реакции при рулении, когда абсолютное значение угловой скорости dδ/dt руления увеличивается в начале поворота руля 1. Соответственно, модуль 11 вычисления параметров управления в одном варианте осуществления настоящего раскрытия сущности допускает предоставление более надлежащего ощущения при рулении.
Дополнительно, модуль 11 вычисления параметров управления в одном варианте осуществления настоящего раскрытия сущности задает предварительно заданное постоянное значение равным демпфирующему компоненту для коррекции, когда абсолютное значение угловой скорости dδ/dt руления равно или превышает вторую заданную угловую скорость dδ2/dt руления. Следовательно, когда водитель поворачивает руль 1, и абсолютное значение угловой скорости dδ/dt руления равно или превышает вторую заданную угловую скорость dδ2/dt руления, можно подавлять демпфирующий компонент для коррекции. Таким образом, модуль 11 вычисления параметров управления в одном варианте осуществления настоящего раскрытия сущности допускает предотвращение несчитывания изменения силы реакции при рулении, вызываемого посредством изменения демпфирующего компонента для коррекции, в силу этого приводя к вызывания странного ощущения при рулении у водителя.
[0026] Фиг. 11 является блок-схемой, иллюстрирующей конфигурацию модуля 11Bb вычисления осевой силы обратной связи.
Как показано на фиг. 11, модуль 11Bb вычисления осевой силы обратной связи выполнен с возможностью включать в себя модуль 11Bba вычисления осевой силы тока, модуль 11Bbb вычисления смешанной осевой силы, модуль 11Bbc обнаружения угловой скорости руления, модуль 11Bbd определения руления и модуль 11Bbe выполнения вычисления осевой силы обратной связи.
Модуль 11Bba вычисления осевой силы тока выполнен с возможностью вычислять осевую силу рулевой зубчатой рейки (осевую силу рулевой зубчатой рейки, в дальнейшем в этом документе, также называемую "осевой силой электрического тока") согласно следующему выражению (6) на основе электрического тока при повороте, обнаруженного посредством модуля 8B обнаружения тока при повороте. В следующем выражении (6), во-первых, умножаются электрический ток при повороте, константа крутящего момента [Нм/А] для вычисления выходного крутящего момента поворотного двигателя 8A на основе электрического тока при повороте и передаточное отношение двигателя для передачи крутящего момента двигателя поворотного двигателя 8A. Затем, в следующем выражении (6), результат умножения делится на радиус ведущей шестерни [м] поворотного двигателя 8A, результат деления умножается на эффективность, когда передается выходной крутящий момент поворотного двигателя 8A, и результат умножения вычисляется как осевая сила электрического тока. Затем модуль 11Bba вычисления осевой силы тока выводит результат вычисления в модуль 11Bbb вычисления смешанной осевой силы и модуль 11Bbe выполнения вычисления осевой силы обратной связи.
Осевая сила электрического тока=(электрический ток при повороте * передаточное отношение двигателя * константа крутящего момента [Нм/А]/радиус ведущей шестерни [м]) * эффективность… (6)
[0027] В данном документе, электрический ток при повороте колеблется, когда руль 1 поворачивается, целевой угол θ* поворота колеблется, и задается разность между целевым углом θ* поворота и фактическим углом θ поворота. Помимо этого, электрический ток при повороте также колеблется, когда управляемые колеса 2 поворачиваются, поперечная сила Fd на шинах прикладывается к управляемым колесам 2, и задается разность между целевым углом θ* поворота и фактическим углом θ поворота. Дополнительно, электрический ток при повороте также колеблется, когда возмущения поверхности дороги воздействуют на управляемые колеса 2 посредством неровности и т.п. поверхности дороги, поперечная сила Fd на шинах прикладывается к управляемым колесам 2, и задается разность между целевым углом θ* поворота и фактическим углом θ поворота. Следовательно, модуль 11Bb вычисления осевой силы обратной связи допускает вычисление осевой силы рулевой зубчатой рейки (осевой силы электрического тока), в которой отражается влияние поперечной силы Fd на шинах, которая должна прикладываться к управляемым колесам 2, на основе электрического тока при повороте. В данном документе, осевая сила электрического тока формируется в то время, когда задается разность между целевым углом θ* поворота и фактическим углом θ поворота. По этой причине, обеспечивается опережение по фазе в осевой силе электрического тока по сравнению с фактической осевой силой рулевой зубчатой рейки или осевой силой поперечного G, как проиллюстрировано на фиг. 12.
[0028] Модуль 11Bbb вычисления смешанной осевой силы вычисляет осевую силу рулевой зубчатой рейки (в дальнейшем в этом документе, также называемую "осевой силой поперечного G") согласно следующему выражению (7) на основе поперечного ускорения Gy, обнаруженного посредством датчика 6 поперечного G. В следующем выражении (7), во-первых, умножаются нагрузка на передние колеса и поперечное ускорение Gy, и результат умножения вычисляется как осевая сила (сила в осевом направлении), прикладываемая к управляемым колесам 2. Затем, в следующем выражении (7), такая вычисленная осевая сила, которая должна прикладываться к управляемым колесам 2, и постоянное число (в дальнейшем в этом документе, также называемое "коэффициентом тяги") согласно углу тяги или подвески умножаются, и результат умножения вычисляется как осевая сила поперечного G.
Осевая сила поперечного G = осевая сила, прикладываемая к управляемым колесам 2 * коэффициент тяги… (7).
Осевая сила, прикладываемая к управляемым колесам 2=нагрузка на передние колеса * поперечное ускорение Gy.
[0029] Здесь, поперечное ускорение Gy формируется, когда управляемые колеса 2 поворачиваются, поперечная сила Fd на шинах прикладывается к управляемым колесам 2, и транспортное средство A выполняет поворот. Соответственно, модуль 11Bbb вычисления смешанной осевой силы допускает вычисление осевой силы рулевой зубчатой рейки (осевой силы поперечного G), в которой отражается влияние поперечной силы Fd на шинах, которая должна прикладываться к управляемым колесам 2, на основе поперечного ускорения Gy. В данном документе, поскольку датчик 6 поперечного G размещается на рессоре (кузове транспортного средства), обнаружение поперечного ускорения Gy задерживается. Следовательно, как проиллюстрировано на фиг. 12, обеспечивается задержка по фазе в осевой силе поперечного G по сравнению с фактической осевой силой рулевой зубчатой рейки.
Следует отметить, что в одном варианте осуществления настоящего раскрытия сущности, описан пример использования поперечного ускорения Gy, обнаруженного посредством датчика 6 поперечного G, когда осевая сила поперечного G вычисляется. Тем не менее, может использоваться другая конфигурация. Например, может использоваться конфигурация, в которой угловая скорость γ рыскания, обнаруженная посредством датчика 7 угловой скорости рыскания, умножается на скорость V транспортного средства, обнаруженную посредством датчика 5 скорости транспортного средства, и результат γ*V умножения используется вместо поперечного ускорения Gy.
[0030] Помимо этого, модуль 11Bbb вычисления смешанной осевой силы вычисляет осевую силу рулевой зубчатой рейки (в дальнейшем в этом документе, также называемую "осевой силой угловой скорости рыскания") согласно выражению (8) на основе скорости V транспортного средства, обнаруженной посредством датчика 5 скорости транспортного средства, и угловой скорости γ рыскания, обнаруженной посредством датчика 7 угловой скорости рыскания. В следующем выражении (8), во-первых, умножаются нагрузка на передние колеса, скорость V транспортного средства и угловая скорость γ рыскания, и результат умножения вычисляется как осевая сила, прикладываемая к управляемым колесам 2. Затем, в следующем выражении (8), такая вычисленная осевая сила, которая должна прикладываться к управляемым колесам 2, и коэффициент тяги умножаются, и результат умножения вычисляется как осевая сила угловой скорости рыскания.
Осевая сила угловой скорости рыскания = осевая сила, прикладываемая к управляемым колесам 2 * коэффициент тяги... (8)
Осевая сила, прикладываемая к управляемым колесам 2 = нагрузка на передние колеса * скорость V транспортного средства * угловая скорость γ рыскания.
[0031] Здесь, угловая скорость γ рыскания формируется, когда управляемые колеса 2 поворачиваются, поперечная сила Fd на шинах прикладывается к управляемым колесам 2, и транспортное средство A выполняет поворот. Таким образом, модуль 11Bbb вычисления смешанной осевой силы допускает вычисление осевой силы рулевой зубчатой рейки (осевой силы угловой скорости рыскания, в которой отражается влияние поперечной силы Fd на шинах, которая должна прикладываться к управляемым колесам 2, на основе угловой скорости γ рыскания. Здесь, поскольку датчик 7 угловой скорости рыскания размещается на рессоре (кузове транспортного средства), обнаружение угловой скорости γ рыскания задерживается. Следовательно, в осевой силе в зависимости от скорости относительно вертикальной оси, как проиллюстрировано на фиг. 12, обеспечивается задержка по фазе по сравнению с фактической осевой силой рулевой зубчатой рейки.
[0032] Кроме того, модуль 11Bbb вычисления смешанной осевой силы считывает осевую силу электрического тока из модуля 11Bba вычисления осевой силы тока. Затем модуль 11Bbb вычисления смешанной осевой силы вычисляет осевую силу TBR рулевой зубчатой рейки (в дальнейшем в этом документе, также называемую "смешанной осевой силой") согласно следующему выражению (9) на основе осевой силы электрического тока, которая считана, осевой силы поперечного G, которая вычислена, и осевой силы угловой скорости рыскания. В следующем выражении (9) осевая сила поперечного G умножается на коэффициент K1 распределения, осевая сила электрического тока умножается на коэффициент K2 распределения, осевая сила в зависимости от угловой скорости рыскания умножается на коэффициент K3 распределения, и сумма этих результатов умножения вычисляется как смешанная осевая сила TBR. Другими словами, смешанная осевая сила TBR вычисляется на основе значения, полученного посредством умножения осевой силы поперечного G на коэффициент K1 распределения, значения, полученного посредством умножения осевой силы электрического тока на коэффициент K2 распределения, и значения, полученного посредством умножения осевой силы угловой скорости рыскания на коэффициент K3 распределения. Затем модуль 11Bbb вычисления смешанной осевой силы выводит результат вычисления в модуль 11Bbd определения руления и модуль 11Bbe выполнения вычисления осевой силы обратной связи. Здесь, смешанная осевая сила TBR принимает положительное значение для осевой силы, чтобы поворачивать управляемые колеса 2 направо, и имеет отрицательное значение для осевой силы, чтобы поворачивать управляемые колеса 2 налево.
TBR = осевая сила поперечного G * K1 + осевая сила электрического тока * K2+осевая сила угловой скорости рыскания * K3… (9)
[0033] Здесь, коэффициенты K1, K2 и K3 распределения представляют собой коэффициенты распределения осевой силы поперечного G, осевой силы электрического тока и осевой силы угловой скорости рыскания. Соотношение абсолютных величин между коэффициентами K1, K2 и K3 распределения выполнено с возможностью удовлетворять K1>K2>K3. Другими словами, коэффициенты распределения задаются в порядке убывания осевой силы поперечного G, осевой силы электрического тока и осевой силы угловой скорости рыскания. Например, коэффициенты K1, K2 и K3 распределения, соответственно, задаются таким образом, что K1=0,6, K2=0,3 и K3=0,1. Следовательно, модуль 11Bbb вычисления смешанной осевой силы вычисляет осевую силу рулевой зубчатой рейки, в которой отражается влияние поперечной силы Fd на шинах, которая должна прикладываться к управляемым колесам 2, в качестве смешанной осевой силы TBR.
[0034] Фиг. 13 является графиком, представляющим смешанную осевую силу TBR и фактическую осевую силу рулевой зубчатой рейки.
Таким образом, модуль 11Bbb вычисления смешанной осевой силы в одном варианте осуществления настоящего раскрытия сущности вычисляет смешанную осевую силу TBR на основе значения, полученного посредством умножения осевой силы электрического тока на коэффициент K2 распределения, и значения, полученного посредством умножения осевой силы поперечного G на коэффициент K1 распределения. Здесь, как проиллюстрировано на фиг. 12, обеспечивается задержка по фазе в осевой силе поперечного G по сравнению с фактической осевой силой рулевой зубчатой рейки. Кроме того, обеспечивается опережение по фазе в осевой силе электрического тока по сравнению с фактической осевой силой рулевой зубчатой рейки. Соответственно, модуль 11Bbb вычисления смешанной осевой силы в одном варианте осуществления настоящего раскрытия сущности суммирует осевую силу электрического тока с осевой силой поперечного G, так что может компенсироваться задержка по фазе, возникающая посредством осевой силы поперечного G, как проиллюстрировано на фиг. 13, и может вычисляться более надлежащая смешанная осевая сила TBR. Следовательно, модуль 11 вычисления параметров управления в одном варианте осуществления настоящего раскрытия сущности приводит в действие двигатель 9A для формирования силы реакции на основе смешанной осевой силы TBR, так что может прикладываться более надлежащая сила реакции при рулении.
[0035] Помимо этого, модуль 11Bbb вычисления смешанной осевой силы в одном варианте осуществления настоящего раскрытия сущности вычисляет смешанную осевую силу TBR на основе значения, полученного посредством умножения осевой силы электрического тока на коэффициент K2 распределения, и значения, полученного посредством умножения осевой силы поперечного G на коэффициент K1 распределения. Здесь, в транспортном средстве A, когда возмущения поверхности дороги действуют на управляемые колеса 2 посредством неровности и т.п. поверхности дороги, и поперечная сила Fd на шинах прикладывается к управляемым колесам 2, задается разность между целевым углом θ* поворота и фактическим углом θ поворота. Следовательно, модуль 11Bbb вычисления смешанной осевой силы в одном варианте осуществления настоящего раскрытия сущности суммирует осевую силу электрического тока с осевой силой поперечного G, так что влияние возмущений поверхности дороги, которое оказывается на управляемые колеса 2, может отражаться на смешанной осевой силе TBR, и может вычисляться более надлежащая смешанная осевая сила TBR.
Следовательно, модуль 11 вычисления параметров управления в одном варианте осуществления настоящего раскрытия сущности приводит в действие двигатель 9A для формирования силы реакции на основе смешанной осевой силы TBR, так что может прикладываться более надлежащая сила реакции при рулении.
Кроме того, модуль 11Bbb вычисления смешанной осевой силы в одном варианте осуществления настоящего раскрытия сущности задает коэффициент K1 распределения осевой силы поперечного G таким образом, что он превышает коэффициент K2 распределения осевой силы электрического тока. Следовательно, модуль 11Bbb вычисления смешанной осевой силы в одном варианте осуществления настоящего раскрытия сущности допускает уменьшение коэффициента распределения осевой силы электрического тока, и даже если оцененная точность осевой силы электрического тока ухудшается посредством влияния инерции или трения поворотного двигателя 8A, такое ухудшение в оцененной точности смешанной осевой силы TBR может подавляться. Следовательно, модуль 11 вычисления параметров управления в одном варианте осуществления настоящего раскрытия сущности приводит в действие двигатель 9A для формирования силы реакции на основе смешанной осевой силы TBR, так что может прикладываться более надлежащая сила реакции при рулении.
[0036] Помимо этого, модуль 11Bbb вычисления смешанной осевой силы в одном варианте осуществления настоящего раскрытия сущности вычисляет осевую силу TFB обратной связи на основе значения, полученного посредством умножения осевой силы электрического тока на коэффициент K2 распределения, значения, полученного посредством умножения осевой силы поперечного G на коэффициент K1 распределения, и значения, полученного посредством умножения осевой силы угловой скорости рыскания на коэффициент K3 распределения. Здесь, например, когда транспортное средство A попадает в состояние буксования, электрический ток при повороте и увеличение поперечного ускорения Gy. Следовательно, результат обнаружения датчика 6 поперечного G и результат обнаружения модуля 8B обнаружения тока при повороте принимают максимальные значения (насыщенные значения). Напротив, хотя угловая скорость γ рыскания также увеличивается, величина увеличения угловой скорости γ рыскания меньше величин увеличения электрического тока при повороте и поперечного ускорения Gy. Следовательно, результат обнаружения датчика 7 угловой скорости рыскания не достигает максимального значения (насыщенного значения). Следовательно, результат обнаружения датчика 7 угловой скорости рыскания изменяется в зависимости от степени состояния буксования транспортного средства A. Соответственно, смешанная осевая сила TBR может изменяться в зависимости от степени состояния буксования транспортного средства A. Как результат, модуль 11 вычисления параметров управления в одном варианте осуществления настоящего раскрытия сущности приводит в действие двигатель 9A для формирования силы реакции на основе смешанной осевой силы TBR, так что может прикладываться более надлежащая сила реакции при рулении.
Модуль 11Bbc обнаружения угловой скорости руления вычисляет угловую скорость dδ/dt руления руля 1 на основе угла δ поворота при рулении, обнаруженного посредством датчика 3 угла поворота при рулении. Затем модуль 11Bbc обнаружения угловой скорости руления выводит результат вычисления в модуль 11Bbb вычисления смешанной осевой силы и модуль 11Bbd определения руления. Здесь, угловая скорость dδ/dt руления задается таким образом, что она принимает положительное значение угловой скорости, когда руль 1 вращается по часовой стрелке, и принимает отрицательное значение угловой скорости, когда руль 1 вращается против часовой стрелки.
[0037] Модуль 11Bbd определения руления определяет то, что водитель дополнительно поворачивает руль 1 или возвращает руль 1, на основе смешанной осевой силы TBR, вычисленной посредством модуля 11Bbb вычисления смешанной осевой силы, и угловой скорости dδ/dt руления, обнаруженной посредством модуля 11Bbc обнаружения угловой скорости руления. В качестве операции дополнительного поворота, например, руль 1 (угол δ поворота при рулении) управляется в направлении дальше от нейтральной позиции. Кроме того, в качестве операции возврата, например, руль 1 (угол δ поворота при рулении) управляется в направлении ближе к нейтральной позиции. Конкретно, модуль 11Bbd определения руления определяет то, что выполняется операция дополнительного поворота, и задает переменную K4 равной 1,0, когда смешанная осевая сила TBR является положительным значением, и угловая скорость dδ/dt руления является положительным значением, либо когда смешанная осевая сила TBR является отрицательным значением, и угловая скорость dδ/dt руления является отрицательным значением. Переменная K4 является флагом, представляющим то, какая из операции дополнительного поворота или операции возврата выполняется. Переменная K4 задается таким образом, что когда выполняется операция дополнительного поворота руля 1, переменная K4 задается равной 1,0, тогда как когда выполняется операция возврата, переменная K4 задается равной 0,0. Дополнительно, модуль 11Bbd определения руления определяет то, что не выполняется операция дополнительного поворота руля 1, и задает переменную K4 равной 0, когда смешанная осевая сила TBR является положительным значением, и угловая скорость dδ/dt руления является отрицательным значением, либо когда смешанная осевая сила TBR является отрицательным значением, и угловая скорость dδ/dt руления является положительным значением. Затем модуль 11Bbd определения руления выводит переменную K4, которая задана, в модуль 11Bbe выполнения вычисления осевой силы обратной связи.
[0038] Модуль 11Bbe выполнения вычисления осевой силы обратной связи считывает осевую силу электрического тока, смешанную осевую силу TBR, угловую скорость dδ/dt руления и переменную K4 из модуля 11Bba вычисления осевой силы тока, модуля 11Bbb вычисления смешанной осевой силы, модуля 11Bbc обнаружения угловой скорости руления и модуля 11Bbd определения руления, соответственно. Затем, модуль 11Bbe выполнения вычисления осевой силы обратной связи вычисляет осевую силу рулевой зубчатой рейки (в дальнейшем в этом документе, осевую силу TFB обратной связи) согласно следующему выражению (10) на основе осевой силы электрического тока, смешанной осевой силы TBR, угловой скорости dδ/dt руления и переменной K4, которые считаны. Затем модуль 11Bbe выполнения вычисления осевой силы обратной связи выводит результат вычисления в модуль 11Bf коррекции осевой силы обратной связи.
Осевая сила TFB обратной связи=осевая сила электрического тока * GB + смешанная осевая сила TBR * (1-GB)… (10)
[0039] Тем не менее, GB является числовым значением, представляющим коэффициент GB распределения осевой силы электрического тока и коэффициент (1-GB) распределения смешанной осевой силы TBR (в дальнейшем в этом документе, называемым "коэффициентом распределения"). Соответственно, модуль 11Bbe выполнения вычисления осевой силы обратной связи вычисляет осевую силу TFB обратной связи посредством суммирования осевой силы электрического тока и смешанной осевой силы TBR с коэффициентом GB:(1-GB) на основе коэффициента GB распределения.
Здесь, в качестве способа задания коэффициента GB распределения может использоваться, например, способ задания коэффициента GB распределения посредством модуля 11Bbf задания коэффициентов распределения на основе результата определения, выводимого из модуля 11Bbd определения руления. Модуль 11Bbf задания коэффициентов распределения считывает угловую скорость dδ/dt руления и переменную K4 из модуля 11Bbd определения руления. Затем, модуль 11Bbf задания коэффициентов распределения вычисляет коэффициент GB распределения согласно следующему выражению (11) на основе угловой скорости dδ/dt руления и переменной K4, которые считаны.
GB=K4*K5… (11)
[0040] Тем не менее, K5 является числовым значением, представляющим коэффициент GB распределения осевой силы электрического тока и коэффициент (1-GB) распределения смешанной осевой силы TBR, когда K4 равна 1,0, т.е. при операции дополнительного поворота руля 1. Соответственно, модуль 11Bbe выполнения вычисления осевой силы обратной связи суммирует осевую силу электрического тока и смешанную осевую силу TBR на основе переменной K5 с коэффициентом K5:(1-K5), при операции дополнительного поворота руля 1, чтобы вычислять осевую силу TFB обратной связи. Следует отметить, что когда K4 равна 0,0, т.е. при операции возврата руля 1, смешанная осевая сила TBR задается равной осевой силе TFB обратной связи независимо от переменной K5.
Здесь, в качестве способа задания переменной K5 может использоваться, например, способ считывания переменной K5, соответствующей угловой скорости dδ/dt руления, из карты M5 управления. В качестве карты M5 управления, в качестве примера предоставляется карта, в которой зарегистрированы переменные K5, соответствующие угловым скоростям dδ/dt руления.
[0041] Фиг. 14 является графиком, представляющим карту M5 управления.
Как проиллюстрировано на фиг. 14, на карте M5 управления, в диапазоне, в котором абсолютное значение угловой скорости dδ/dt руления равно или превышает 0 и меньше четвертой заданной угловой скорости dδ4/dt руления (>0), переменная K5 задается равной десятому заданному значению (например, 1,0) независимо от абсолютной величины угловой скорости dδ/dt руления. Кроме того, на карте M5 управления, в диапазоне, в котором абсолютное значение угловой скорости dδ/dt руления равно или превышает пятую заданную угловую скорость dδ5/dt руления (>dδ4/dt), переменная K5 задается равной одиннадцатому заданному значению (<десятого заданного значения, например, 0,0) независимо от абсолютной величины угловой скорости dδ/dt руления. Дополнительно, на карте M5 управления, в диапазоне, в котором абсолютное значение угловой скорости dδ/dt руления равно или превышает четвертую заданную угловую скорость dδ4/dt руления и меньше пятой заданной угловой скорости dδ5/dt руления, переменная K5 линейно уменьшается согласно абсолютному значению угловой скорости dδ/dt руления. Конкретно, на карте M5 управления, в диапазоне, в котором абсолютное значение угловой скорости dδ/dt руления равно или превышает четвертую заданную угловую скорость dδ4/dt руления и меньше пятой заданной угловой скорости dδ5/dt руления, переменная K5 задается в соответствии с линейной функцией, представляющей взаимосвязь между абсолютным значением угловой скорости dδ/dt руления и переменной K5. В линейной функции в случае, если абсолютное значение угловой скорости dδ/dt руления составляет четвертую заданную угловую скорость dδ4/dt руления, переменная K5 задается равной десятому заданному значению (1,0), в случае если абсолютное значение угловой скорости dδ/dt руления составляет пятую заданную угловую скорость dδ5/dt руления, переменная K5 задается равной одиннадцатому заданному значению (0,0). Соответственно, модуль 11Bbf задания коэффициентов распределения задает коэффициент GB распределения равным 1,0, когда переменная K4 равна 1,0 (при операции дополнительного поворота), и когда абсолютное значение угловой скорости dδ/dt руления меньше четвертой заданной угловой скорости dδ4/dt руления (при операции руления на низкой скорости). Затем модуль 11Bbe выполнения вычисления осевой силы обратной связи задает осевую силу электрического тока равной осевой силе TFB обратной связи. Помимо этого, модуль 11Bbf задания коэффициентов распределения задает коэффициент GB распределения равным 0,0, в случае если переменная K4 равна 1,0 (при операции дополнительного поворота), и абсолютное значение угловой скорости dδ/dt руления превышает пятую заданную угловую скорость dδ5/dt руления (при операции руления на высокой скорости). Соответственно, модуль 11Bbe выполнения вычисления осевой силы обратной связи задает смешанную осевую силу TBR равной осевой силе TFB обратной связи. Дополнительно, модуль 11Bbf задания коэффициентов распределения задает переменную K5 равной коэффициенту GB распределения, в случае если переменная K4 равна 1,0 (при операции дополнительного поворота), и абсолютное значение угловой скорости dδ/dt руления равно или превышает четвертую заданную угловую скорость dδ4/dt руления и меньше пятой заданной угловой скорости dδ5/dt руления (при операции руления на средней скорости). Соответственно, модуль 11Bbe выполнения вычисления осевой силы обратной связи задает значение равным осевой силе TFB обратной связи, причем значение получается посредством суммирования значения, полученного посредством умножения осевой силы электрического тока на переменную K5, и значения, полученного посредством умножения смешанной осевой силы TBR на (1-K5). С другой стороны, модуль 11Bbf задания коэффициентов распределения задает 0,0 в качестве коэффициента GB распределения, когда переменная K4 равна 0,0 (при операции возврата), независимо от угловой скорости dδ/dt руления. Затем модуль 11Bbe выполнения вычисления осевой силы обратной связи задает смешанную осевую силу TBR равной осевой силе TFB обратной связи.
[0042] Таким образом, когда операция возврата руля 1 выполняется, модуль 11Bbe выполнения вычисления осевой силы обратной связи в одном варианте осуществления настоящего раскрытия сущности задает осевую силу электрического тока равной осевой силе TFB обратной связи, в случае если абсолютное значение четвертой угловой скорости dδ/dt руления меньше четвертой заданной угловой скорости dδ4/dt руления. В механическом типе устройства управления рулением, в котором руль 1 и управляемые колеса 2 механически зацепляются между собой, сила реакции при рулении для того, чтобы возвращать руль 1 в нейтральную позицию, формируется посредством поперечной силы Fd на шинах, соответствующей повороту управляемых колес 2, и трения, при операции дополнительного поворота руля 1. Помимо этого, в модуле 11Bbe выполнения вычисления осевой силы обратной связи в одном варианте осуществления настоящего раскрытия сущности, осевая сила электрического тока равна суммированному значению поперечной силы Fd на шинах и трения, при операции дополнительного поворота руля 1. Следовательно, модуль 11 вычисления параметров управления в одном варианте осуществления настоящего раскрытия сущности задает осевую силу электрического тока равной осевой силе TFB обратной связи, так что может прикладываться сила реакции при рулении для того, чтобы возвращать руль 1 в нейтральную позицию, аналогично механическому типу устройства управления рулением. Соответственно, модуль 11 вычисления параметров управления в одном варианте осуществления настоящего раскрытия сущности допускает приложение более надлежащей силы реакции при рулении при операции дополнительного поворота руля 1.
Между прочим, коэффициент трения, соответствующий повороту управляемых колес 2, не включен в смешанную осевую силу TBR. Следовательно, например, если способ задания смешанной осевой силы TBR равной осевой силе TFB обратной связи используется при операции дополнительного поворота руля 1, имеется вероятность того, что ощущение при рулении включает в себя некомфортное ощущение.
[0043] Помимо этого, когда операция возврата руля 1 выполняется, модуль 11Bbe выполнения вычисления осевой силы обратной связи в одном варианте осуществления настоящего раскрытия сущности задает смешанную осевую силу TBR, в которой осевая сила электрического тока и осевая сила поперечного G распределяются с предварительно заданным коэффициентом распределения, равной осевой силе TFB обратной связи независимо от абсолютной величины абсолютного значения угловой скорости dδ/dt руления. Здесь, в механическом типе устройства управления рулением, в котором руль 1 и управляемые колеса 2 механически зацепляются между собой при операции возврата руля 1, сила реакции при рулении для того, чтобы возвращать руль 1 в нейтральную позицию, формируется посредством поперечной силы Fd на шинах, соответствующей повороту управляемых колес 2. Таким образом, в механическом типе устройства управления рулением, при операции возврата руля 1, водитель уменьшает удерживающую силу для удерживания руля 1 и заставляет плавно проскальзывать руль 1 по ладони, чтобы возвращать руль 1 в нейтральную позицию и возвращать управляемые колеса 2 в нейтральную позицию. Напротив, согласно модулю 11Bbe выполнения вычисления осевой силы обратной связи в одном варианте осуществления настоящего раскрытия сущности, смешанная осевая сила TBR задается равной осевой силе TFB обратной связи. Следовательно, даже если электрический ток при повороте уменьшается, и осевая сила электрического тока уменьшается, можно подавлять силу реакции при рулении для того, чтобы возвращать руль 1 в нейтральную позицию. Соответственно, модуль 11Bbe выполнения вычисления осевой силы обратной связи в одном варианте осуществления настоящего раскрытия сущности возвращает руль 1 в нейтральную позицию, аналогично механическому типу устройства управления рулением, когда водитель уменьшает удерживающую силу для удерживания руля 1 и заставляет плавно проскальзывать руль 1 по ладони. Соответственно, модуль 11 вычисления параметров управления в одном варианте осуществления настоящего раскрытия сущности допускает приложение более надлежащей силы реакции при рулении при операции возврата руля 1.
[0044] Дополнительно, когда определяется то, что операция дополнительного возврата руля 1 выполняется, и абсолютное значение угловой скорости dδ/dt руления равно или превышает четвертую заданную угловую скорость dδ4/dt руления, модуль 11Bbe выполнения вычисления осевой силы обратной связи в одном варианте осуществления настоящего раскрытия сущности смешивает осевую силу электрического тока и смешанную осевую силу TBR, чтобы задавать осевую силу TFB обратной связи, и помимо этого, задавать большим коэффициент распределения осевой силы электрического тока по мере того, как становится меньше абсолютное значение угловой скорости dδ/dt руления. Соответственно, например, когда угол δ поворота при рулении перемещается по нейтральной позиции, и операция дополнительного возврата руля 1 непрерывно выполняется, при операции возврата руля 1, модуль 11Bbe выполнения вычисления осевой силы обратной связи в одном варианте осуществления настоящего раскрытия сущности допускает постепенное переключение осевой силы TFB обратной связи со смешанной осевой силы TBR на осевую силу электрического тока по мере того, как абсолютное значение угловой скорости dδ/dt руления постепенно уменьшается при операции дополнительного возврата. Соответственно, модуль 11 вычисления параметров управления в одном варианте осуществления настоящего раскрытия сущности допускает приложение более надлежащей силы реакции при рулении.
[0045] Возвращаясь к фиг. 3, модуль 11Bc вычисления конечной осевой силы считывает угол δ поворота при рулении, скорость V транспортного средства, поперечное ускорение Gy, осевую силу TFF прямой связи и осевую силу TFB обратной связи из датчика 3 угла поворота при рулении, датчика 5 скорости транспортного средства, датчика 6 поперечного G, модуля 11Ba вычисления осевой силы прямой связи и модуля 11Bf коррекции осевой силы обратной связи, соответственно. Затем, модуль 11Bc вычисления конечной осевой силы вычисляет угловую скорость dδ/dt руления руля 1 на основе угла δ поворота при рулении, который считан. Затем модуль 11Bc вычисления конечной осевой силы вычисляет осевую силу рулевой зубчатой рейки (в дальнейшем в этом документе, называемую "конечной осевой силой") согласно следующему выражению (12) на основе угла δ поворота при рулении, скорости V транспортного средства, поперечного ускорения Gy, осевой силы TFF прямой связи и осевой силы TFB обратной связи, которые считаны, и угловой скорости dδ/dt руления, которая вычислена. Затем модуль 11Bc вычисления конечной осевой силы выводит результат вычисления в модуль 11Bd преобразования силы реакции при рулении и осевой силы.
Конечная осевая сила=осевая сила TFF прямой связи * GF + осевая сила TFB обратной связи * (1-GF)… (12)
[0046] Здесь, GF является числовым значением (в дальнейшем в этом документе, называемым "коэффициентом распределения") для того, чтобы представлять коэффициент GF распределения осевой силы TFF прямой связи и коэффициент (1-GF) распределения осевой силы TFB обратной связи. Соответственно, модуль 11Bc вычисления конечной осевой силы суммирует осевую силу TFF прямой связи и осевую силу TFB обратной связи с коэффициентом GF:(1-GF) на основе коэффициента GF распределения, с тем чтобы вычислять конечную осевую силу.
Таким образом, модуль 11Bc вычисления конечной осевой силы в одном варианте осуществления настоящего раскрытия сущности вычисляет конечную осевую силу на основе осевой силы TFB обратной связи и осевой силы TFF прямой связи. Здесь, осевая сила TFB обратной связи изменяется в зависимости от изменения поверхности дороги или изменения состояния транспортного средства, поскольку влияние поперечной силы Fd на шинах, прикладываемой к управляемым колесам 2, отражается на осевой силе TFB обратной связи. Напротив, поскольку влияние поперечной силы Fd на шинах не отражается на осевой силе TFF прямой связи, осевая сила TFF прямой связи плавно изменяется независимо от изменения и т.п. поверхности дороги. Соответственно, модуль 11Bc вычисления конечной осевой силы вычисляет конечную осевую силу на основе не только осевая сила TFB обратной связи, но также и осевая сила TFF прямой связи, так что может вычисляться более надлежащая конечная осевая сила.
[0047] Модуль 11Bc вычисления конечной осевой силы выполнен с возможностью включать в себя модуль 11Bca вычисления коэффициентов распределения. Модуль 11Bca вычисления коэффициентов распределения выполнен с возможностью задавать коэффициент GF распределения на основе коэффициента GF1 распределения на основе разности осевых сил, коэффициента GF2 распределения на основе поперечного ускорения Gy, коэффициента GF3 распределения на основе скорости V транспортного средства и угла δ поворота при рулении и коэффициента GF4 распределения на основе угловой скорости dδ/dt руления. В качестве разности осевых сил может использоваться, например, разность между осевой силой TFF прямой связи и осевой силой TFB обратной связи. В частности, разность осевых сил задается как результат вычитания, полученный посредством вычитания осевой силы TFB обратной связи из осевой силы TFF прямой связи. Помимо этого, в качестве способа задания коэффициента GF распределения может использоваться, например, способ умножения меньшего значения из коэффициента GF1 распределения на основе разности осевых сил или коэффициента GF2 распределения на основе поперечного ускорения Gy, коэффициента GF3 распределения на основе скорости V транспортного средства и угла δ поворота при рулении и коэффициента GF4 распределения на основе угловой скорости dδ/dt руления и затем задания результата умножения в качестве коэффициента GF распределения.
[0048] Фиг. 15 является графиком, представляющим карту M6 управления.
В качестве способа задания коэффициента GF1 распределения может использоваться, например, способ считывания коэффициента GF1 распределения, соответствующего абсолютному значению разности осевых сил, из карты M6 управления. В качестве карты M6 управления, например, предусмотрена карта, в которой зарегистрированы коэффициенты GF1 распределения, соответствующие абсолютным значениям разности осевых сил. Конкретно, как проиллюстрировано на фиг. 15, на карте M6 управления, в диапазоне, в котором абсолютное значение разности осевых сил равно или превышает 0 и меньше первой заданной разности Z1 осевых сил (>0), коэффициент GF1 распределения задается равным двенадцатому заданному значению (например, 1,0) независимо от абсолютной величины разности осевых сил. В качестве первой заданной разности Z1 осевых сил может использоваться, например, разность осевых сил, посредством которой начинает ухудшаться оцененная точность осевой силы TFF прямой связи. Кроме того, на карте M6 управления, в диапазоне, в котором абсолютное значение разности осевых сил равно или превышает вторую заданную разность Z2 осевых сил (>Z1), например, коэффициент GF1 распределения задается равным тринадцатому заданному значению (<двенадцатого заданного значения, например, 0,0) независимо от абсолютной величины разности осевых сил. В качестве второй заданной разности Z2 осевых сил, например, можно использовать разность осевых сил, посредством которой оцененная точность осевой силы TFF прямой связи задается ниже оцененной точности осевой силы TFB обратной связи. Дополнительно, на карте M6 управления, в диапазоне, в котором абсолютное значение разности осевых сил равно или превышает первую заданную разность Z1 осевых сил и меньше второй заданной разности Z2 осевых сил, коэффициент GF1 распределения линейно уменьшается согласно абсолютному значению разности осевых сил. Конкретно, на карте M6 управления, в диапазоне, в котором абсолютное значение разности осевых сил равно или превышает первую заданную разность Z1 осевых сил и меньше второй заданной разности Z2 осевых сил, коэффициент GF1 распределения задается в соответствии с линейной функцией таким образом, что он представляет взаимосвязь между абсолютным значением разности осевых сил и коэффициентом GF1 распределения. В линейной функции в случае, если абсолютное значение разности осевых сил составляет первую заданную разность Z1 осевых сил, коэффициент GF1 распределения задается равным двенадцатому заданному значению (1,0), тогда как в случае, если абсолютное значение разности осевых сил составляет вторую заданную разность Z2 осевых сил, коэффициент GF1 распределения задается равным тринадцатому заданному значению (0,0).
[0049] Таким образом, в случае если первое абсолютное значение разности осевых сил равно или превышает первую заданную разность Z1 осевых сил, модуль 11Bc вычисления конечной осевой силы в одном варианте осуществления настоящего раскрытия сущности задает коэффициент GF1 распределения (коэффициент GF распределения осевой силы TFF прямой связи) меньшим коэффициента для случая, в котором абсолютное значение разности осевых сил меньше первой заданной разности Z1 осевых сил. Таким образом, например, когда μ поверхности дороги уменьшается, оцененная точность осевой силы TFF прямой связи ухудшается, и разность осевых сил увеличивается, модуль 11Bc вычисления конечной осевой силы в одном варианте осуществления настоящего раскрытия сущности допускает увеличение коэффициента (1-GF) распределения осевой силы TFB обратной связи. Следовательно, модуль 11Bc вычисления конечной осевой силы в одном варианте осуществления настоящего раскрытия сущности допускает приложение более надлежащей силы реакции при рулении.
[0050] Фиг. 16 является графиком, представляющим карту M7 управления.
Здесь, в качестве способа задания коэффициента GF2 распределения может использоваться, например, способ считывания коэффициента GF2 распределения, соответствующего абсолютному значению поперечного ускорения Gy, из карты M7 управления. В качестве карты M7 управления, например, предусмотрена карта, в которой зарегистрированы коэффициенты GF2 распределения, соответствующие абсолютным значениям поперечного ускорения Gy. Конкретно, как проиллюстрировано на фиг. 16, на карте M7 управления, в диапазоне, в котором абсолютное значение поперечного ускорения Gy1 равно или превышает 0 и меньше первого заданного поперечного ускорения Gy1 (>0), коэффициент GF2 распределения задается равным четырнадцатому заданному значению (например, 1,0) независимо от абсолютной величины поперечного ускорения Gy. В качестве первого заданного поперечного ускорения Gy1 может использоваться, например, поперечное ускорение Gy, посредством которого начинает ухудшаться оцененная точность осевой силы TFF прямой связи. Помимо этого, на карте M7 управления, в диапазоне, в котором абсолютное значение поперечного ускорения Gy равно или превышает второе заданное поперечное ускорение Gy2 (>Gy1), коэффициент GF2 распределения задается равным пятнадцатому заданному значению (<четырнадцатого заданного значения, например, 0,0) независимо от абсолютной величины поперечного ускорения Gy. В качестве второго заданного поперечного ускорения Gy2 может использоваться, например, поперечное ускорение Gy, посредством которого оцененная точность осевой силы TFF прямой связи задается меньшей оцененной точности осевой силы TFB обратной связи. Дополнительно, на карте M7 управления, в диапазоне, в котором абсолютное значение поперечного ускорения Gy1 равно или превышает первое поперечное ускорение Gy и меньше второго заданного поперечного ускорения Gy2, коэффициент GF2 распределения линейно уменьшается согласно абсолютному значению поперечного ускорения Gy. Конкретно, на карте M7 управления, в диапазоне, в котором абсолютное значение поперечного ускорения Gy равно или превышает первое заданное поперечное ускорение Gy1 и меньше второго заданного поперечного ускорения Gy2, коэффициент GF2 распределения задается в соответствии с линейной функцией, представляющей взаимосвязь между абсолютным значением поперечного ускорения Gy и коэффициентом GF2 распределения. В линейной функции в случае, если абсолютное значение поперечного ускорения Gy составляет первое заданное поперечное ускорение Gy1, коэффициент GF3 распределения задается равным четырнадцатому заданному значению (1,0), и в случае, если абсолютное значение поперечного ускорения Gy составляет второе заданное поперечное ускорение Gy2, коэффициент GF3 распределения задается равным пятнадцатому заданному значению (0,0).
[0051] Таким образом, в случае если абсолютное значение поперечного ускорения Gy равно или превышает первое заданное поперечное ускорение Gy1, модуль 11Bc вычисления конечной осевой силы в одном варианте осуществления настоящего раскрытия сущности задает коэффициент GF2 распределения (коэффициент GF распределения осевой силы TFF прямой связи) меньшим коэффициента распределения для случая, в котором абсолютное значение поперечного ускорения Gy1 меньше первого поперечного ускорения Gy. Соответственно, например, когда поперечное ускорение Gy увеличивается, и оцененная точность осевой силы TFF прямой связи уменьшается, модуль 11Bc вычисления конечной осевой силы в одном варианте осуществления настоящего раскрытия сущности допускает увеличение коэффициента (1-GF) распределения осевой силы TFB обратной связи. Следовательно, модуль 11Bc вычисления конечной осевой силы в одном варианте осуществления настоящего раскрытия сущности допускает приложение более надлежащей силы реакции при рулении.
[0052] Фиг. 17A и фиг. 17B являются графиками, представляющими карты M8a и M8b управления.
Здесь, в качестве способа задания коэффициента GF3 распределения может использоваться, например, способ считывания коэффициентов GF3a и GF3b распределения, соответствующих абсолютному значению скорости V транспортного средства и абсолютному значению угла δ поворота при рулении, из карт M8a и M8b управления, умножения коэффициентов GF3a и GF3b распределения, которые считаны, и задания результата умножения в качестве коэффициента GF3 распределения. В качестве карты управления M8a, например, предусмотрена карта, в которой зарегистрированы коэффициенты GF3 распределения, соответствующие абсолютным значениям скорости V транспортного средства. Конкретно, как проиллюстрировано на фиг. 17A, на карте управления M8a, в диапазоне, в котором абсолютное значение скорости V транспортного средства равно или превышает 0 и меньше третьей заданной скорости V3 транспортного средства, коэффициент GF3a распределения задается равным шестнадцатому заданному значению (например, 0,5) независимо от абсолютной величины скорости V транспортного средства. В качестве третьей заданной скорости V3 транспортного средства может использоваться, например, скорость V транспортного средства, посредством которой возникает нелинейность свойства шины вследствие низкой скорости для скорости V транспортного средства (нелинейность поперечной силы Fd на шинах относительно угла скольжения шин), и начинает ухудшаться оцененная точность осевой силы TFF прямой связи. Помимо этого, на карте управления M8a, абсолютное значение скорости V транспортного средства равно или превышает четвертую заданную скорость V4 транспортного средства (>V3), коэффициент GF3a распределения задается равным семнадцатому заданному значению (>шестнадцатого заданного значения, например, 1,0) независимо от абсолютной величины скорости V транспортного средства. В качестве четвертой заданной скорости V4 транспортного средства может использоваться, например, скорость V транспортного средства, посредством которой оцененная точность осевой силы TFF прямой связи повышается в большей степени по сравнению с оцененной точностью осевой силы TFB обратной связи. Дополнительно, на карте управления M8a, в диапазоне, в котором абсолютное значение скорости V транспортного средства равно или превышает третью заданную скорость V3 транспортного средства и меньше четвертой заданной скорости V4 транспортного средства, коэффициент GF3a распределения линейно увеличивается согласно абсолютному значению скорости V транспортного средства. Конкретно, на карте управления M8a, в диапазоне, в котором абсолютное значение скорости V транспортного средства равно или превышает третью заданную скорость V3 транспортного средства и меньше четвертой заданной скорости V4 транспортного средства, коэффициент GF3a распределения задается в соответствии с линейной функцией, представляющей взаимосвязь между скоростью V транспортного средства и коэффициентом GF3a распределения. В линейной функции в случае, если абсолютное значение скорости V транспортного средства составляет третью заданную скорость V3 транспортного средства, коэффициент GF3a распределения задается равным шестнадцатому заданному значению (0,5), и в случае, если скорость V транспортного средства составляет четвертую заданную скорость V4 транспортного средства, коэффициент GF3a распределения задается равным семнадцатому заданному значению (1,0).
[0053] Таким образом, в случае если абсолютное значение скорости V транспортного средства меньше четвертой заданной скорости V4 транспортного средства, модуль 11Bc вычисления конечной осевой силы в одном варианте осуществления настоящего раскрытия сущности задает коэффициент GF3a распределения (коэффициент GF распределения осевой силы TFF прямой связи) меньшим коэффициента распределения для случая, в котором абсолютное значение скорости V транспортного средства равно или превышает четвертую заданную скорость V4 транспортного средства. Следовательно, модуль 11Bc вычисления конечной осевой силы в одном варианте осуществления настоящего раскрытия сущности допускает увеличение коэффициента (1-GF) распределения осевой силы TFB обратной связи, когда, например, скорость V транспортного средства уменьшается, и оцененная точность осевой силы TFF прямой связи ухудшается. Следовательно, модуль 11Bc вычисления конечной осевой силы в одном варианте осуществления настоящего раскрытия сущности допускает приложение более надлежащей силы реакции при рулении.
[0054] Помимо этого, в качестве карты M8b управления, например, предусмотрена карта, в которой зарегистрированы коэффициенты GF3b распределения, соответствующие абсолютным значениям угла δ поворота при рулении. Конкретно, как проиллюстрировано на фиг. 17B, на карте M8b управления, в диапазоне, в котором абсолютное значение угла δ поворота при рулении равно или превышает 0 и меньше первого заданного угла δ поворота при рулении (>0), коэффициент GF3b распределения задается равным восемнадцатому заданному значению (например, 1,0) независимо от абсолютной величины угла δ поворота при рулении. В качестве первого заданного угла δ1 поворота при рулении может использоваться, например, угол δ поворота при рулении, посредством которого начинает ухудшаться оцененная точность осевой силы TFF прямой связи. Помимо этого, на карте M8b управления, в диапазоне, в котором абсолютное значение угла δ поворота при рулении равно или превышает второй заданный угол δ поворота при рулении (>δ1), коэффициент GF3b распределения задается равным девятнадцатому заданному значению (<восемнадцатого заданного значения, например, 0,6) независимо от абсолютной величины угла δ поворота при рулении.
В качестве второго заданного угла δ2 поворота при рулении может использоваться, например, угол δ поворота при рулении, посредством которого оцененная точность осевой силы TFF прямой связи ухудшается в большей степени по сравнению с оцененной точностью осевой силы TFB обратной связи. Дополнительно, на карте M8b управления, в диапазоне, в котором абсолютное значение угла δ поворота при рулении равно или превышает первый заданный угол δ1 поворота при рулении и меньше второго заданного угла δ2 поворота при рулении, коэффициент GF3b распределения линейно уменьшается согласно абсолютному значению угла δ поворота при рулении. Конкретно, на карте M8b управления, в диапазоне, в котором абсолютное значение угла δ поворота при рулении равно или превышает первый заданный угол δ1 поворота при рулении и меньше второго заданного угла δ2 поворота при рулении, коэффициент GF3b распределения задается в соответствии с линейной функцией, представляющей взаимосвязь между абсолютным значением угла δ поворота при рулении и коэффициентом GF3b распределения. В линейной функции в случае, если абсолютное значение угла δ поворота при рулении составляет первый заданный угол δ1 поворота при рулении, коэффициент GF3b распределения задается равным восемнадцатому заданному значению (1,0), и в случае, если абсолютное значение угла δ поворота при рулении составляет второй заданный угол δ2 поворота при рулении, коэффициент GF3 распределения задается равным девятнадцатому заданному значению (0,6).
[0055] Таким образом, в случае если абсолютное значение угла δ поворота при рулении равно или превышает первый заданный угол δ1 поворота при рулении, модуль 11Bc вычисления конечной осевой силы в одном варианте осуществления настоящего раскрытия сущности задает коэффициент GF3b распределения (коэффициент GF распределения осевой силы TFF прямой связи) меньшим коэффициента распределения для случая, в котором абсолютное значение угла δ поворота при рулении меньше первого заданного угла δ1 поворота при рулении. Соответственно, например, когда угол δ поворота при рулении увеличивается, и оцененная точность осевой силы TFF прямой связи ухудшается, модуль 11Bc вычисления конечной осевой силы в одном варианте осуществления настоящего раскрытия сущности допускает увеличение коэффициента (1-GF) распределения осевой силы TFB обратной связи. Следовательно, модуль 11Bc вычисления конечной осевой силы в одном варианте осуществления настоящего раскрытия сущности допускает приложение более надлежащей силы реакции при рулении.
[0056] Фиг. 18 является графиком, представляющим карту M9 управления.
Здесь, в качестве способа задания коэффициента GF4 распределения может использоваться, например, способ считывания коэффициента GF4 распределения, соответствующего абсолютному значению угловой скорости dδ/dt руления, из карты M9 управления. В качестве карты M9 управления, например, предусмотрена карта, в которой зарегистрированы коэффициенты GF4 распределения, соответствующие абсолютным значениям угловой скорости dδ/dt руления. Конкретно, как проиллюстрировано на фиг. 18, на карте M9 управления, в диапазоне, в котором абсолютное значение угловой скорости dδ/dt руления равно или превышает 0 и меньше четвертой заданной угловой скорости dδ4/dt руления (>0), коэффициент GF4 распределения задается равным двадцатому заданному значению (например, 1,0) независимо от абсолютной величины угловой скорости dδ/dt руления. В качестве четвертой заданной угловой скорости dδ4/dt руления может использоваться, например, угловая скорость dδ/dt руления, посредством которой начинает ухудшаться оцененная точность осевой силы TFF прямой связи. Кроме того, на карте M9 управления, в диапазоне, в котором абсолютное значение угловой скорости dδ/dt руления равно или превышает пятую заданную угловую скорость dδ5/dt руления (>dδ4/dt), коэффициент GF4 распределения задается равным двадцать первому заданному значению (<двадцатого заданного значения, например, 0,0) независимо от абсолютной величины угловой скорости dδ/dt руления. В качестве пятой заданной угловой скорости dδ5/dt руления может использоваться, например, угловая скорость dδ/dt руления, посредством которой оцененная точность осевой силы TFF прямой связи ниже оцененной точности осевой силы TFB обратной связи. Дополнительно, на карте M9 управления, в диапазоне, в котором абсолютное значение угловой скорости dδ/dt руления равно или превышает четвертую заданную угловую скорость dδ4/dt руления и меньше пятой заданной угловой скорости dδ5/dt руления, коэффициент GF4 распределения линейно уменьшается согласно абсолютному значению угловой скорости dδ/dt руления. Конкретно, на карте M9 управления, в диапазоне, в котором абсолютное значение угловой скорости dδ/dt руления равно или превышает четвертую заданную угловую скорость dδ4/dt руления и меньше пятой заданной угловой скорости dδ5/dt руления, коэффициент GF4 распределения задается в соответствии с линейной функцией, представляющей взаимосвязь между абсолютным значением угловой скорости dδ/dt руления и коэффициентом GF4 распределения. В линейной функции, когда абсолютное значение угловой скорости dδ/dt руления составляет четвертую заданную угловую скорость dδ4/dt руления, коэффициент GF4 распределения задается равным двадцатому заданному значению (1,0), а когда абсолютное значение угловой скорости dδ/dt руления составляет пятую заданную угловую скорость dδ5/dt руления, коэффициент GF4 распределения задается равным двадцать первому заданному значению (0,0).
[0057] Таким образом, в случае если абсолютное значение угловой скорости dδ/dt руления равно или превышает четвертую заданную угловую скорость dδ4/dt руления, модуль 11Bc вычисления конечной осевой силы в одном варианте осуществления настоящего раскрытия сущности задает коэффициент GF4 распределения (коэффициент GF распределения осевой силы TFF прямой связи) меньшим коэффициента распределения для случая, в котором абсолютное значение угловой скорости dδ/dt руления меньше четвертой заданной угловой скорости dδ4/dt руления. Соответственно, например, когда угловая скорость dδ/dt руления увеличивается, и оцененная точность осевой силы TFF прямой связи ухудшается, модуль 11Bc вычисления конечной осевой силы в одном варианте осуществления настоящего раскрытия сущности допускает увеличение коэффициента (1-GF) распределения осевой силы TFB обратной связи. Следовательно, модуль 11Bc вычисления конечной осевой силы в одном варианте осуществления настоящего раскрытия сущности допускает приложение более надлежащей силы реакции при рулении.
[0058] Соответственно, модуль 11Bc вычисления конечной осевой силы задает осевую силу TFF прямой связи равной конечной осевой силе, когда абсолютное значение разности осевых сил меньше первой заданной разности Z1 осевых сил, абсолютное значение поперечного ускорения Gy меньше первого поперечного ускорения Gy1, абсолютное значение скорости V транспортного средства равно или превышает четвертую заданную скорость V4 транспортного средства, абсолютное значение угла δ поворота при рулении меньше первого заданного угла δ1 поворота при рулении, и абсолютное значение угловой скорости dδ/dt руления меньше четвертой заданной угловой скорости dδ4/dt руления. Помимо этого, модуль 11Bc вычисления конечной осевой силы задает осевую силу TFB обратной связи равной конечной осевой силе, когда удовлетворяется, по меньшей мере, любой из случая, в котором абсолютное значение разности осевых сил равно или превышает вторую заданную разность Z2 осевых сил, случая, в котором абсолютное значение поперечного ускорения Gy равно или превышает второе заданное поперечное ускорение Gy2, и случая, в котором абсолютное значение угловой скорости dδ/dt руления равно или превышает пятую заданную угловую скорость dδ5/dt руления. Дополнительно, модуль 11Bc вычисления конечной осевой силы задает суммированный результат равным конечной осевой силе, причем суммированный результат получается посредством суммирования умноженного значения, полученного посредством умножения осевой силы TFF прямой связи на коэффициент GF распределения, и умноженного значения, полученного посредством умножения осевой силы TFB обратной связи на коэффициент (1-GF) распределения, когда абсолютное значение разности осевых сил равно или превышает первую заданную разность Z1 осевых сил и меньше второй заданной разности Z2 осевых сил, абсолютное значение поперечного ускорения Gy равно или превышает первое заданное поперечное ускорение Gy1 и меньше второго заданного поперечного ускорения Gy2, абсолютное значение скорости V транспортного средства меньше четвертой заданной скорости V4 транспортного средства, абсолютное значение угла δ поворота при рулении равно или превышает первый заданный угол δ1 поворота при рулении, и абсолютное значение угловой скорости dδ/dt руления равно или превышает четвертую заданную угловую скорость dδ4/dt руления.
[0059] Соответственно, когда транспортное средство A подвергается ситуации, в которой μ поверхности дороги для дороги является высокой (сухая поверхность дороги), скорость V транспортного средства является высокой, угол δ поворота при рулении является небольшим, и угловая скорость dδ/dt руления является небольшой (в дальнейшем в этом документе, называемой "специальной ситуацией"), модуль 11Bc вычисления конечной осевой силы задает осевой силу TFF прямой связи равной конечной осевой силе. Здесь, поскольку осевая сила TFF прямой связи не отражает влияние поперечной силы Fd на шинах, осевая сила TFF прямой связи плавно изменяется независимо от изменения поверхности дороги. Следовательно, модуль 11Bc вычисления конечной осевой силы допускает достижение ощущения устойчивого руления, когда транспортное средство A находится в специальной ситуации. Напротив, модуль 11Bc вычисления конечной осевой силы задает осевую силу TFB обратной связи или суммированный результат, полученный посредством суммирования осевой силы TFF прямой связи и осевой силы TFB обратной связи, когда транспортное средство A находится в ситуации (в дальнейшем в этом документе, называемой "обычной ситуацией"), отличной от "специальной ситуации". Здесь, поскольку влияние поперечной силы Fd на шинах, прикладываемой к управляемым колесам 2, отражается на осевой силе TFB обратной связи, осевая сила TFB обратной связи изменяется в зависимости от изменения поверхности дороги или изменения состояния транспортного средства. Соответственно, когда транспортное средство A находится в обычном состоянии, модуль 11Bc вычисления конечной осевой силы допускает предоставление ощущения при рулении, аналогичного ощущению при рулении для механического типа устройства управления рулением, в котором руль 1 и управляемые колеса 2 механически зацепляются между собой, так что может достигаться естественное ощущение при рулении.
[0060] Возвращаясь к фиг. 3, модуль 11Bd преобразования силы реакции при рулении и осевой силы вычисляет целевую силу реакции при рулении на основе конечной осевой силы, которая вычислена посредством модуля 11Bc вычисления конечной осевой силы. Целевая реакция при рулении является целевым значением силы реакции при рулении. В качестве способа вычисления целевой силы реакции при рулении может использоваться, например, способ считывания целевой силы реакции при рулении, соответствующей скорости V транспортного средства и конечной осевой силе, из карты M10 управления. Карта M10 управления представляет собой карту, в которой целевая сила реакции при рулении, соответствующая конечной осевой силе, зарегистрирована для каждой скорости V транспортного средства.
Фиг. 19 является графиком, представляющим карту M10 управления.
Как проиллюстрировано на фиг. 19, карта M10 управления задается для каждой скорости V транспортного средства. Помимо этого, на карте M10 управления, целевая сила реакции при рулении больше по мере того, как становится больше конечная осевая сила.
Возвращаясь к фиг. 3, модуль 11Be вычисления целевого тока силы реакции вычисляет целевой электрический ток силы реакции в соответствии со следующим выражением (13) на основе целевой силы реакции при рулении, вычисленной посредством модуля 11Bd преобразования силы реакции при рулении и осевой силы. Затем модуль 11Be вычисления целевого тока силы реакции выводит результат вычисления в модуль 9C приведения в действие двигателя для формирования силы реакции.
Целевой ток силы реакции = целевая сила реакции при рулении * усиление… (13)
[0061] Следует отметить, что в одном варианте осуществления настоящего раскрытия сущности, описан пример, в котором модуль 11Be вычисления целевого тока силы реакции вычисляет целевую силу реакции при рулении на основе модуля 11Bd преобразования силы реакции при рулении и осевой силы. Тем не менее, может использоваться другая конфигурация. Например, модуль 11Be вычисления целевого тока силы реакции может корректировать целевую силу реакции при рулении посредством суммирования корректирующей силы реакции, силы реакции при полном упоре и т.п. с целевой силой реакции при рулении, вычисленной посредством модуля 11Bd преобразования силы реакции при рулении и осевой силы, с тем чтобы вычислять целевой электрический ток силы реакции на основе целевой силы реакции при рулении, которая скорректирована. В качестве примера предоставляется корректирующая сила реакции, сила реакции при рулении, прикладываемая, когда целевая сила реакции при рулении скорректирована. Помимо этого, в качестве силы реакции при полном упоре, в качестве примера предоставляется сила реакции при рулении, прикладываемая, когда угол θ поворота становится максимальным.
[0062] Модуль 11Bf коррекции осевой силы обратной связи определяет то, движется или нет транспортное средство A задним ходом, на основе позиции рычага переключения передач, которая считана посредством датчика 12 позиции переключения коробки передач. Здесь, когда определено то, что рычаг переключения передач находится в R-диапазоне (позиция движения задним ходом), модуль 11Bf коррекции осевой силы обратной связи определяет то, что транспортное средство A движется задним ходом. Затем когда определено то, что транспортное средство A движется задним ходом, модуль 11Bf коррекции осевой силы обратной связи выводит осевую силу TFF прямой связи, вычисленную посредством модуля 11Ba вычисления осевой силы прямой связи, в модуль 11Bc вычисления конечной осевой силы в качестве осевой силы TFB обратной связи. С другой стороны, когда определено то, что транспортное средство A не движется задним ходом, модуль 11Bf коррекции осевой силы обратной связи выводит осевую силу TFB обратной связи, вычисленную посредством модуля 11Bb вычисления осевой силы обратной связи, в модуль 11Bc вычисления конечной осевой силы без изменения.
[0063] Работа и т.п.
Ниже описывается работа устройства управления рулением транспортного средства A.
В то время, когда транспортное средство A движется, предполагается, что водитель управляет рулем 1. Затем модуль 11 вычисления параметров управления вычисляет целевой угол θ* поворота на основе угла δ поворота при рулении и скорости V транспортного средства (модуль 11A вычисления целевого угла поворота по фиг. 2). Затем, модуль 11 вычисления параметров управления вычисляет электрический ток целевого угла поворота на основе результата вычитания, полученного посредством вычитания фактического угла θ поворота из целевого угла θ* поворота, который вычислен (модуль 11C вычисления целевого тока при повороте по фиг. 2). Соответственно, модуль 8 управления при повороте поворачивает управляемые колеса 2 на основе рабочей величины руля 1.
[0064] Одновременно, модуль 11 вычисления параметров управления вычисляет осевую силу TFF прямой связи на основе угла δ поворота при рулении и скорости V транспортного средства (модуль 11Ba вычисления осевой силы прямой связи по фиг. 3). Затем, модуль 11 вычисления параметров управления вычисляет осевую силу тока на основе электрического тока угла поворота (модуль 11Bba вычисления осевой силы тока на фиг. 11). Затем, модуль 11 вычисления параметров управления вычисляет осевую силу поперечного G на основе поперечного ускорения Gy (модуль 11Bbb вычисления смешанной осевой силы по фиг. 11). После этого, модуль 11 вычисления параметров управления вычисляет осевую силу угловой скорости рыскания на основе угловой скорости γ рыскания и скорости V транспортного средства (модуль 11Bbb вычисления смешанной осевой силы по фиг. 11). Затем, модуль 11 вычисления параметров управления вычисляет смешанную осевую силу TBR на основе значения, полученного посредством умножения коэффициента K2 распределения на осевую силу электрического тока, которая вычислена, значения, полученного посредством умножения коэффициента K1 распределения на осевую силу поперечного G, и значения, полученного посредством умножения коэффициента K3 распределения на осевую силу угловой скорости рыскания (модуль 11Bbb вычисления смешанной осевой силы по фиг. 11). Коэффициенты K1, K2 и K3 распределения осевой силы поперечного G, осевой силы электрического тока и осевой силы угловой скорости рыскания задаются равными 0,6:0,3:0,1. Затем модуль 11 вычисления параметров управления смешивает осевую силу электрического тока, которая вычислена, и смешанную осевую силу TBR с GB:(1-GB) и задает распределенный результат равным осевой силе TFB обратной связи (модуль 11Bb вычисления осевой силы обратной связи по фиг. 3).
[0065] Далее модуль 11 вычисления параметров управления обращается к карте M6 управления по фиг. 15 и вычисляет коэффициент GF1 распределения на основе абсолютного значения разности осевых сил (модуль 11Bc вычисления конечной осевой силы по фиг. 3). Затем, модуль 11 вычисления параметров управления обращается к карте M7 управления по фиг. 16 и вычисляет коэффициент GF2 распределения на основе абсолютного значения поперечного ускорения Gy (модуль 11Bc вычисления конечной осевой силы по фиг. 3). После этого модуль 11 вычисления параметров управления обращается к картам M8a и Mb управления по фиг. 17 и вычисляет коэффициенты GF3a, GF3b и GF3 распределения на основе абсолютного значения скорости V транспортного средства и абсолютного значения угла δ поворота при рулении (модуль 11Bc вычисления конечной осевой силы по фиг. 3). Затем, модуль 11 вычисления параметров управления обращается к карте M9 управления по фиг. 18 и вычисляет коэффициент GF4 распределения на основе абсолютного значения угловой скорости dδ/dt руления (модуль 11Bc вычисления конечной осевой силы по фиг. 3). Затем модуль 11 вычисления параметров управления умножает меньший из коэффициента GF1 распределения и коэффициента GF2 распределения, которые вычислены, коэффициент GF3 распределения и коэффициент GF4 распределения и задает результат умножения в качестве коэффициента GF распределения. Далее, модуль 11 вычисления параметров управления смешивает осевую силу TFF прямой связи и осевую силу TFB обратной связи, которые вычислены с 1:(1-GF), и вычисляет конечную осевую силу (модуль 11Bc вычисления конечной осевой силы по фиг. 3). Затем, модуль 11 вычисления параметров управления вычисляет целевую силу реакции при рулении на основе конечной осевой силы, которая вычислена (модуль 11Bd преобразования силы реакции при рулении и осевой силы на фиг. 3). Затем, модуль 11 вычисления параметров управления вычисляет целевой электрический ток силы реакции на основе целевой силы реакции при рулении, которая вычислена (модуль 11Be вычисления целевого электрического тока силы реакции по фиг. 3). Далее модуль 11 вычисления параметров управления приводит в действие двигатель 9A для формирования силы реакции на основе целевого электрического тока силы реакции, который вычислен (модуль 9C приведения в действие двигателя для формирования силы реакции по фиг. 2). Соответственно, модуль 9 управления силой реакции прикладывает силу реакции при рулении к рулю 1.
[0066] Таким образом, устройство управления рулением в одном варианте осуществления настоящего раскрытия сущности смешивает осевую силу TFF прямой связи и осевую силу TFB обратной связи с коэффициентами GF1, GF2, GF3 и GF4 распределения на основе разности осевых сил, поперечного ускорения Gy, скорости V транспортного средства, угла δ поворота при рулении и угловой скорости dδ/dt руления, с тем чтобы задавать конечную осевую силу. Затем устройство управления рулением в одном варианте осуществления настоящего раскрытия сущности прикладывает силу реакции при рулении на основе конечной осевой силы, которая задана. Соответственно, поскольку устройство управления рулением в одном варианте осуществления настоящего раскрытия сущности смешивает осевую силу TFF прямой связи и осевую силу TFB обратной связи с коэффициентами GF1, GF2, GF3 и GF4 распределения на основе разности осевых сил, поперечного ускорения Gy, скорости V транспортного средства, угла δ поворота при рулении и угловой скорости dδ/dt руления, так что осевая сила TFF прямой связи и осевая сила TFB обратной связи могут распределяться более надлежащим образом. Следовательно, устройство управления рулением в одном варианте осуществления настоящего раскрытия сущности допускает приложение более надлежащей силы реакции при рулении.
[0067] В одном варианте осуществления настоящего раскрытия сущности, руль 1 по фиг. 1 соответствует рулю. Аналогично, поворотный двигатель 8A и модуль 8C приведения в действие поворотного двигателя по фиг. 1 соответствуют поворотному приводу. Помимо этого, датчик 3 угла поворота при рулении по фиг. 1 соответствует модулю обнаружения угла поворота при рулении. Дополнительно, модуль 11Ba вычисления осевой силы прямой связи по фиг. 1 соответствует модулю вычисления осевой силы прямой связи. Кроме того, датчик 6 поперечного G, датчик 7 угловой скорости рыскания и модуль 8B обнаружения тока при повороте по фиг. 1 соответствуют модулю обнаружения величин, характеризующих состояние. Дополнительно, модуль 11Bb вычисления осевой силы обратной связи на фиг. 3 и модуль 11Bbe выполнения вычисления осевой силы обратной связи на фиг. 11 соответствуют модулю вычисления осевой силы обратной связи. Кроме того, датчик 5 скорости транспортного средства по фиг. 1 соответствует модулю обнаружения скорости транспортного средства. Дополнительно, модуль 11Bc вычисления конечной осевой силы по фиг. 3 соответствует модулю обнаружения угловой скорости руления. Кроме того, датчик 6 поперечного G по фиг. 1 и модуль 11Bc вычисления конечной осевой силы по фиг. 3 соответствуют модулю задания конечной осевой силы. Кроме того, двигатель 9A для формирования силы реакции и модуль 9C приведения в действие двигателя для формирования силы реакции на фиг. 1 и модуль 11B вычисления целевого тока силы реакции на фиг. 2 соответствуют приводу силы реакции.
[0068] Преимущества в настоящем раскрытии сущности
Следующие преимущества обеспечиваются в одном варианте осуществления настоящего раскрытия сущности.
(1) Модуль 11 вычисления параметров управления смешивает осевую силу TFF прямой связи и осевую силу TFB обратной связи с коэффициентами GF1, GF2, GF3 и GF4 распределения на основе разности осевых сил, поперечного ускорения Gy, скорости V транспортного средства, угла δ поворота при рулении и угловой скорости dδ/dt руления, с тем чтобы задавать конечную осевую силу. Затем модуль 11 вычисления параметров управления прикладывает силу реакции при рулении на основе конечной осевой силы, которая задана.
В такой конфигурации, поскольку осевая сила TFF прямой связи и осевая сила TFB обратной связи распределяются с коэффициентами GF1, GF2, GF3 и GF4 распределения на основе разности осевых сил, поперечного ускорения Gy, скорости V транспортного средства, угла δ поворота при рулении и угловой скорости dδ/dt руления, так что осевая сила TFF прямой связи и осевая сила TFB обратной связи могут распределяться более надлежащим образом.
Таким образом, в такой конфигурации, может прикладываться более надлежащая сила реакции при рулении.
[0069] (2) В случае если абсолютное значение разности осевых сил равно или превышает первую заданную разность Z1 осевых сил, модуль 11 вычисления параметров управления задает коэффициент GF распределения (коэффициент GF1 распределения) осевой силы TFF прямой связи меньшим коэффициента распределения для случая, в котором абсолютное значение разности осевых сил меньше первой заданной разности Z1 осевых сил.
В такой конфигурации, например, когда оцененная точность осевой силы TFF прямой связи ухудшается, и разность осевых сил увеличивается, коэффициент (1-GF) распределения осевой силы TFB обратной связи может увеличиваться. Следовательно, может прикладываться более надлежащая сила реакции при рулении.
[0070] (3) В случае если абсолютное значение поперечного ускорения Gy равно или превышает первое заданное поперечное ускорение Gy1, модуль 11 вычисления параметров управления задает коэффициент GF распределения (коэффициент GF2 распределения) осевой силы TFF прямой связи меньшим коэффициента распределения для случая, в котором абсолютное значение поперечного ускорения Gy меньше первого заданного поперечного ускорения Gy1.
В такой конфигурации, например, когда поперечное ускорение Gy увеличивается, и оцененная точность осевой силы TFF прямой связи ухудшается, коэффициент (1-GF) распределения осевой силы TFB обратной связи может увеличиваться. Следовательно, может прикладываться более надлежащая сила реакции при рулении.
[0071] (4) В случае если абсолютное значение скорости V транспортного средства меньше четвертой заданной скорости V4 транспортного средства, модуль 11 вычисления параметров управления задает коэффициент GF распределения (коэффициент GF3 распределения) осевой силы TFF прямой связи меньшим коэффициента распределения для случая, в котором абсолютное значение скорости V транспортного средства превышает четвертую заданную скорость V4 транспортного средства.
В такой конфигурации, например, когда скорость V транспортного средства уменьшается, и оцененная точность осевой силы TFF прямой связи ухудшается, коэффициент (1-GF) распределения осевой силы TFB обратной связи может увеличиваться. Следовательно, может прикладываться более надлежащая сила реакции при рулении.
[0072] (5) В случае если абсолютное значение угла δ поворота при рулении равно или превышает первый заданный угол δ1 поворота при рулении, модуль 11 вычисления параметров управления задает коэффициент GF распределения (коэффициент GF3 распределения) осевой силы TFF прямой связи меньшим коэффициента распределения для случая, в котором абсолютное значение угла δ поворота при рулении меньше первого заданного угла δ1 поворота при рулении.
В такой конфигурации, например, когда угол δ поворота при рулении увеличивается, и оцененная точность осевой силы TFF прямой связи ухудшается, коэффициент (1-GF) распределения осевой силы TFB обратной связи может увеличиваться. Следовательно, может прикладываться более надлежащая сила реакции при рулении.
[0073] (6) В случае если абсолютное значение угловой скорости dδ/dt руления равно или превышает четвертую заданную угловую скорость dδ4/dt руления, модуль 11 вычисления параметров управления задает коэффициент GF распределения (коэффициент GF4 распределения) осевой силы TFF прямой связи меньшим коэффициента распределения для случая, в котором абсолютное значение угловой скорости dδ/dt руления меньше четвертой заданной угловой скорости dδ4/dt руления.
В такой конфигурации, например, когда угловая скорость dδ/dt руления увеличивается, и оцененная точность осевой силы TFF прямой связи ухудшается, можно увеличивать коэффициент (1-GF) распределения осевой силы TFB обратной связи. Следовательно, может прикладываться более надлежащая сила реакции при рулении.
Данная заявка притязает на приоритет заявки на патент (Япония) № 2013-3874 (поданной 11 января 2013 года), которая полностью содержится в данном документе по ссылке.
В данном документе, хотя описано ограниченное число вариантов осуществления с иллюстрацией, должно быть очевидным, что настоящее раскрытие сущности не ограничено ими, и модификации и адаптации в каждый из вариантов осуществления на основе вышеописанного раскрытия сущности могут вноситься специалистами в данной области техники.
Список условных обозначений
[0074] 1 - руль (руль)
3 - датчик угла поворота при рулении (модуль обнаружения угла поворота при рулении)
5 - датчик скорости транспортного средства (модуль обнаружения скорости транспортного средства)
6 - датчик поперечного G (модуль обнаружения величин, характеризующих состояние, модуль задания конечной осевой силы)
7 - датчик угловой скорости рыскания (модуль обнаружения величин, характеризующих состояние)
8A - двигатель для формирования угла поворота (привод угла поворота)
8B - модуль определения тока угла поворота (модуль обнаружения величин, характеризующих состояние)
8C - модуль приведения в действие двигателя для формирования угла поворота (привод угла поворота)
9A - двигатель для формирования силы реакции (привод силы реакции)
9C - модуль приведения в действие двигателя для формирования силы реакции (привод силы реакции)
11B - модуль вычисления целевого тока силы реакции (привод силы реакции)
11Ba - модуль вычисления осевой силы прямой связи (модуль вычисления осевой силы прямой связи)
11Bb - модуль вычисления осевой силы обратной связи (модуль вычисления осевой силы обратной связи)
11Bbe - модуль выполнения вычисления осевой силы обратной связи (модуль вычисления осевой силы обратной связи)
11Bc - модуль вычисления конечной осевой силы (модуль задания конечной осевой силы)
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ РУЛЕНИЕМ | 2013 |
|
RU2643018C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РУЛЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ УПРАВЛЕНИЯ РУЛЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2643748C2 |
| УСТРОЙСТВО ПОМОЩИ ПРИ ВОЖДЕНИИ В ПОЛОСЕ | 2014 |
|
RU2647823C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РУЛЕНИЕМ | 2013 |
|
RU2582012C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РУЛЕНИЕМ | 2013 |
|
RU2581808C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РУЛЕНИЕМ | 2013 |
|
RU2582517C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РУЛЕНИЕМ | 2013 |
|
RU2623359C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РУЛЕНИЕМ | 2013 |
|
RU2576553C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РУЛЕНИЕМ | 2013 |
|
RU2581809C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ УСТОЙЧИВОСТЬЮ | 2013 |
|
RU2644063C2 |
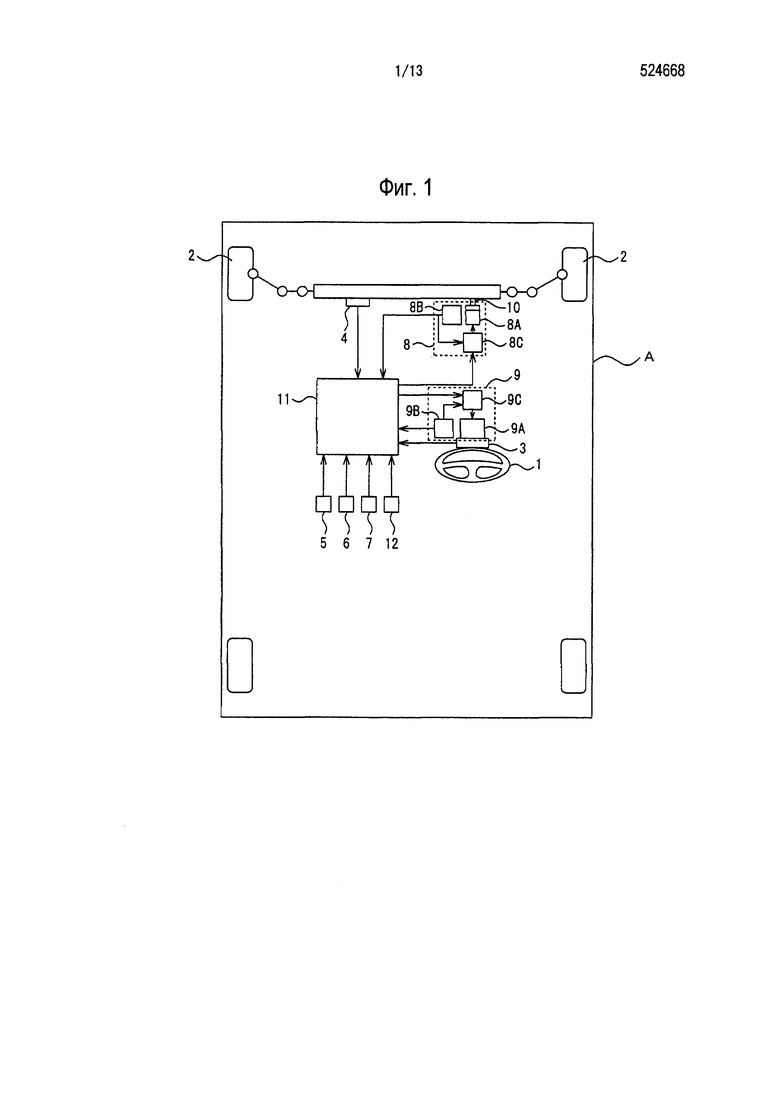
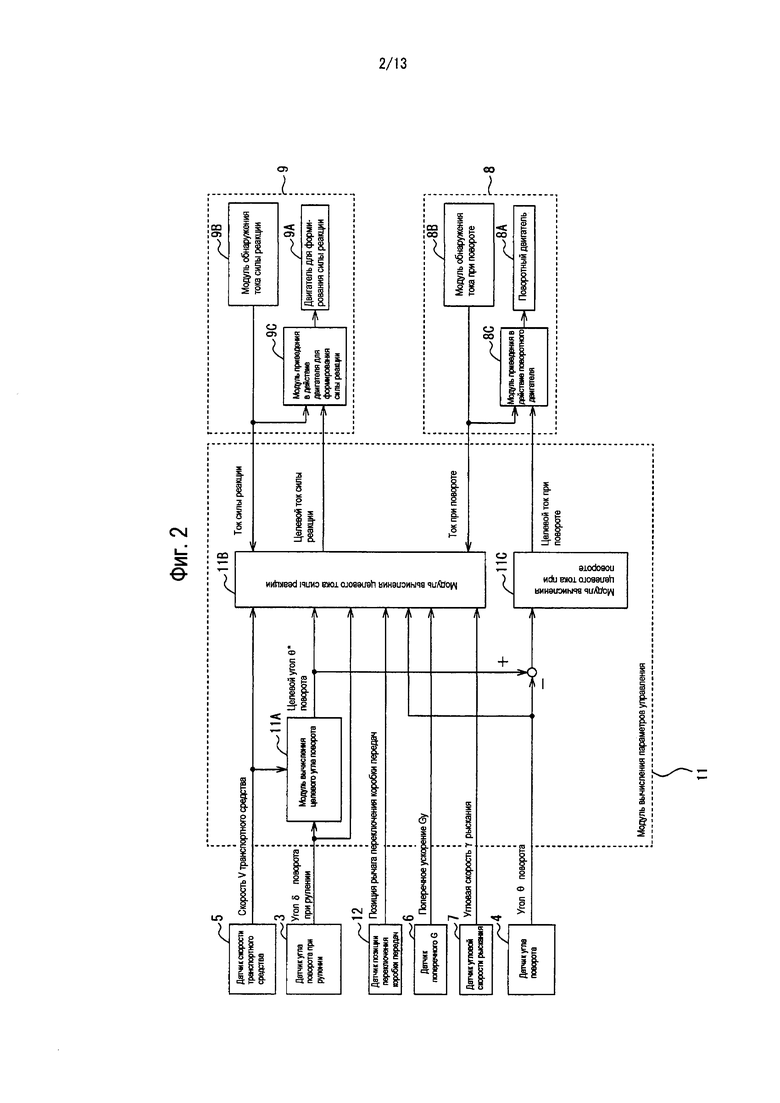
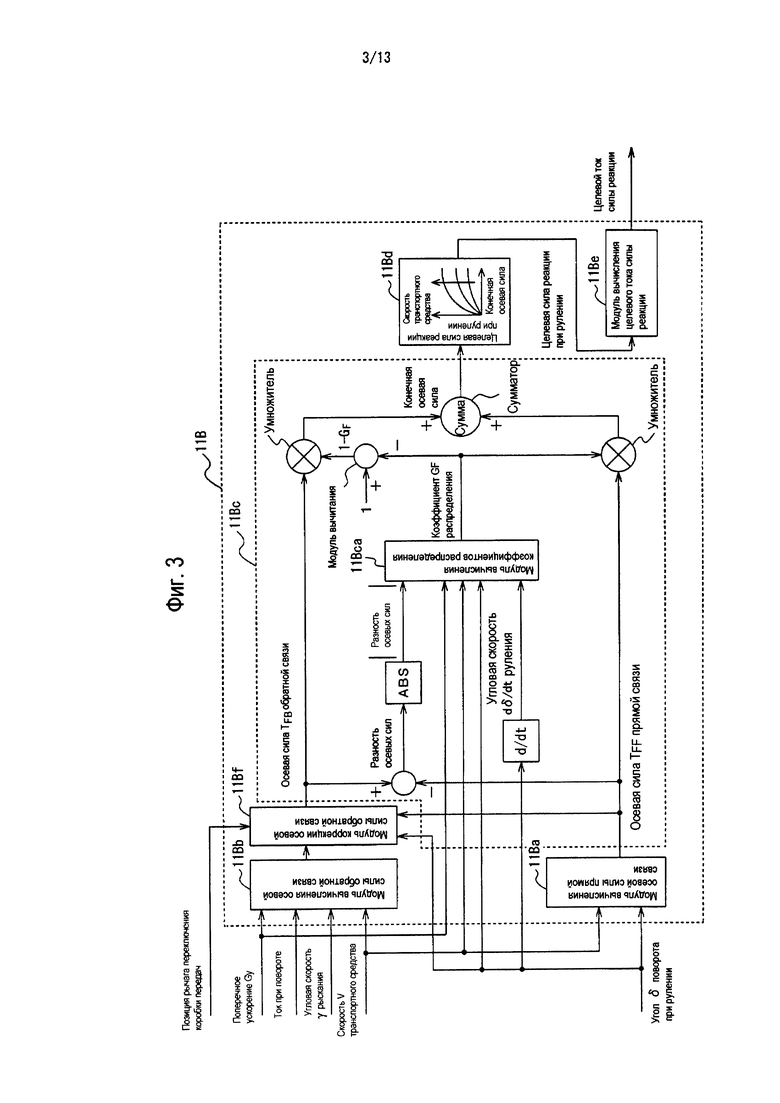
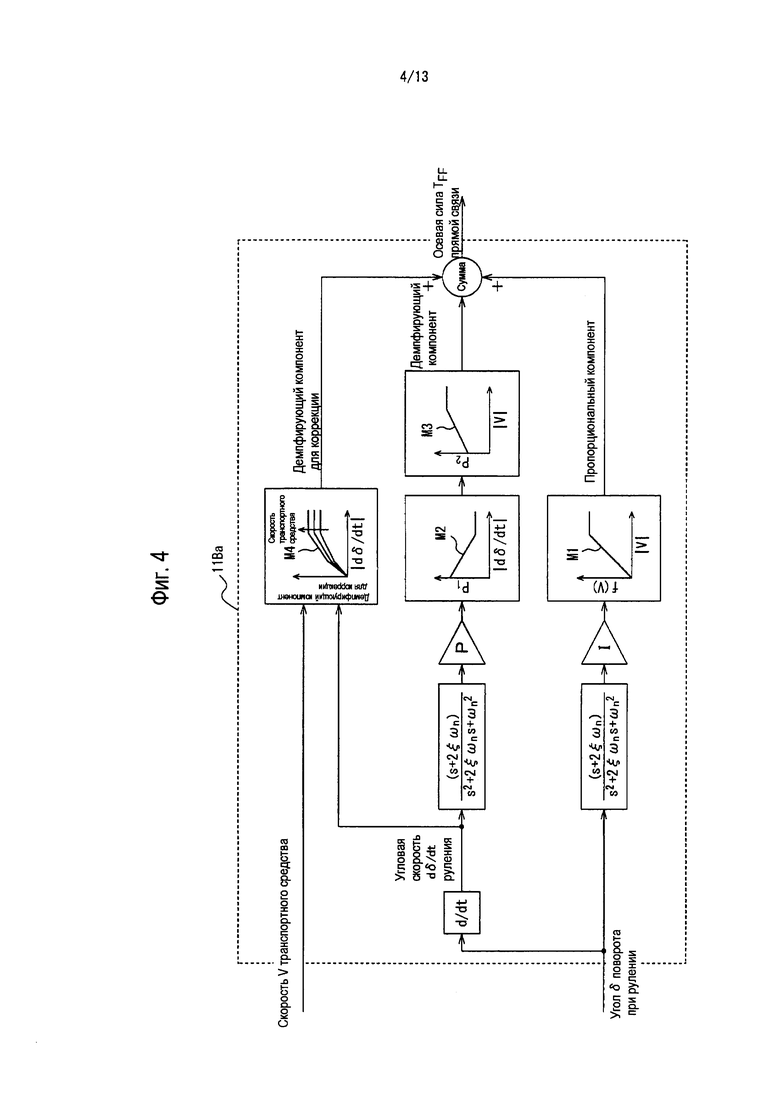
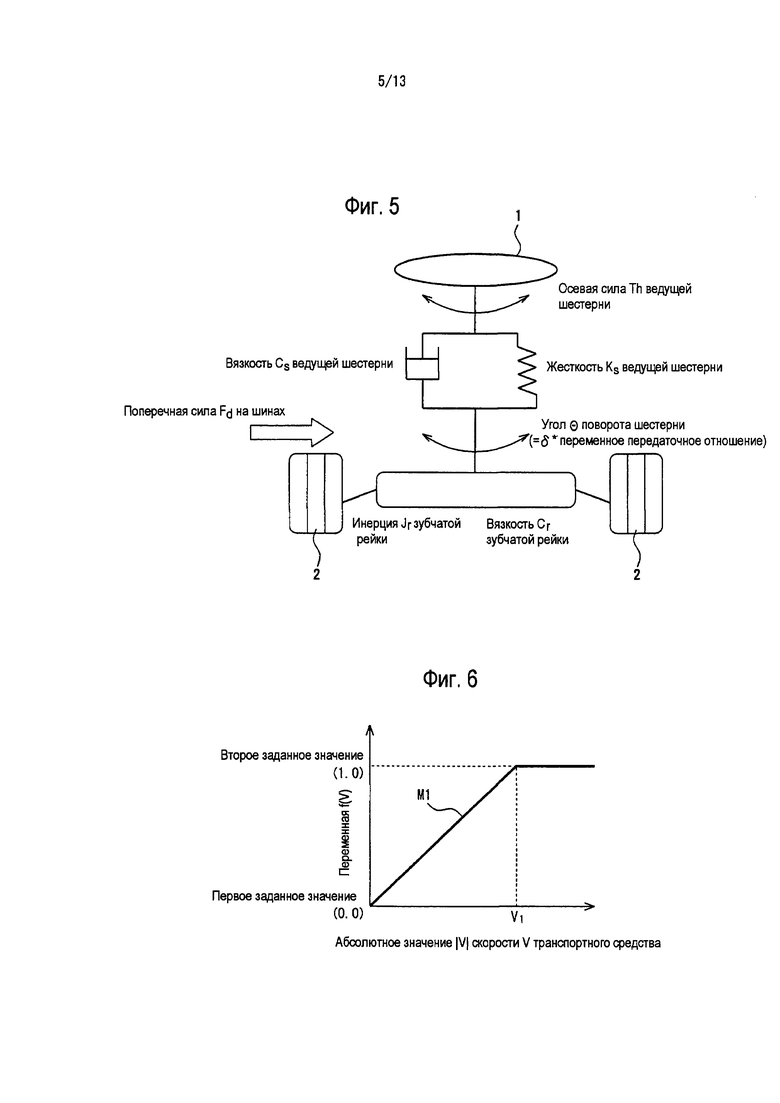
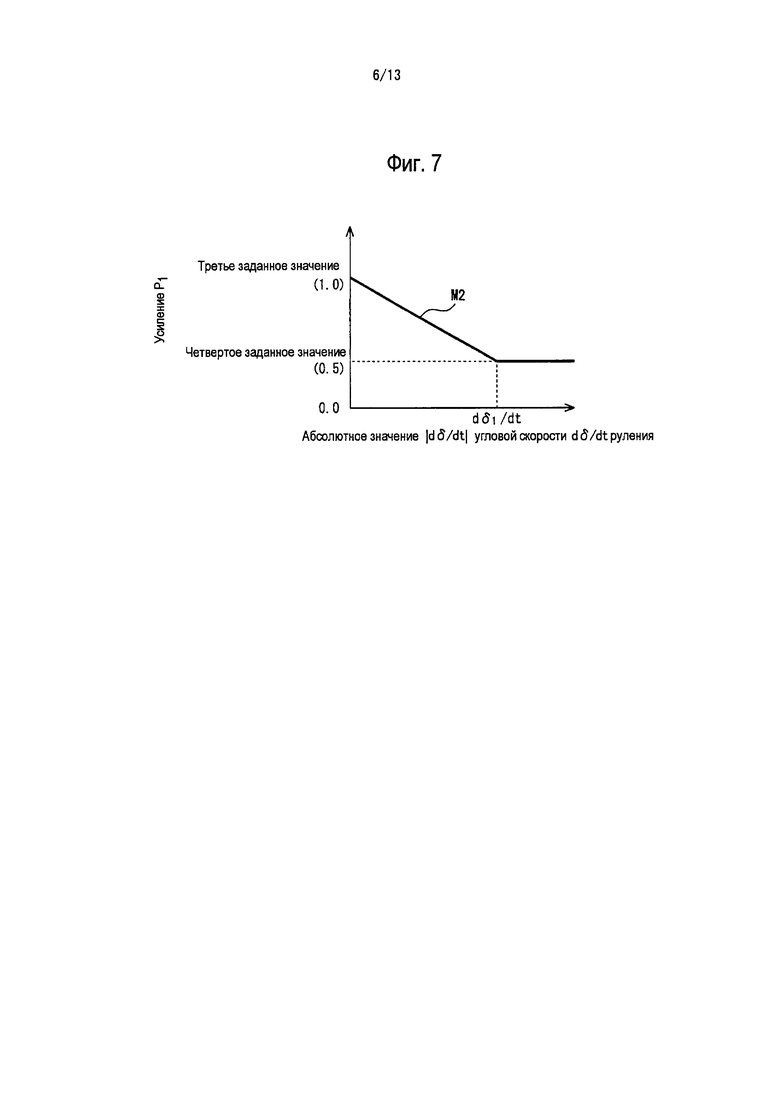
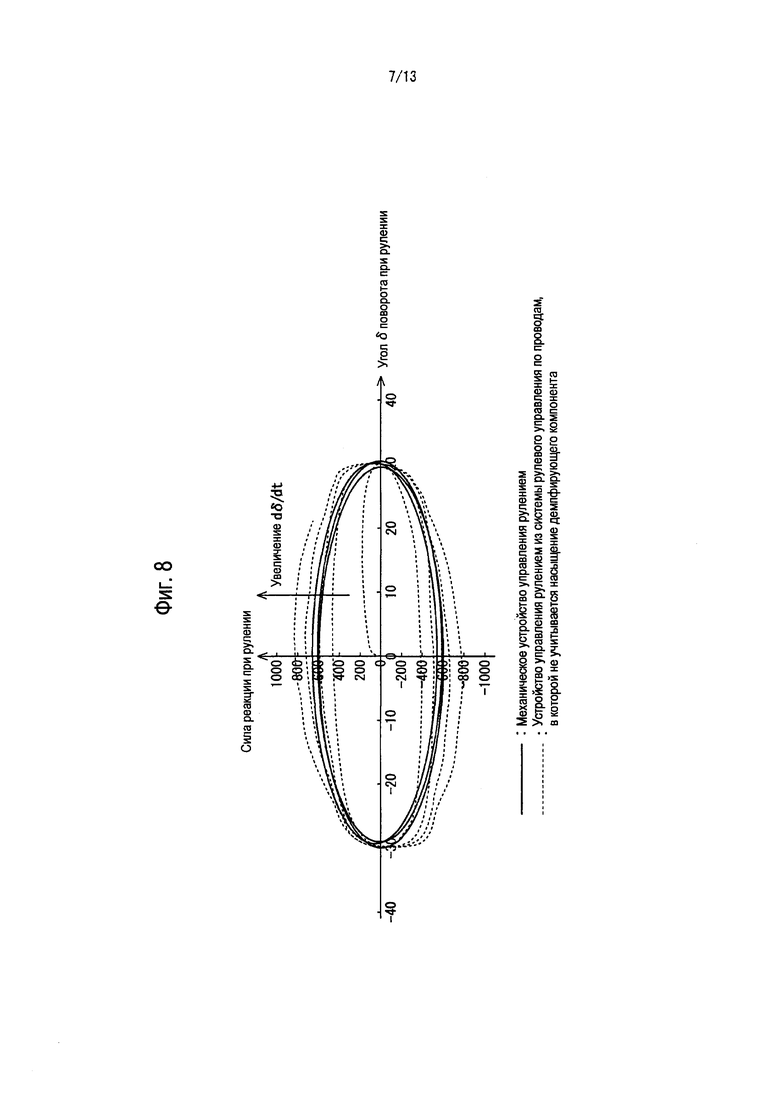
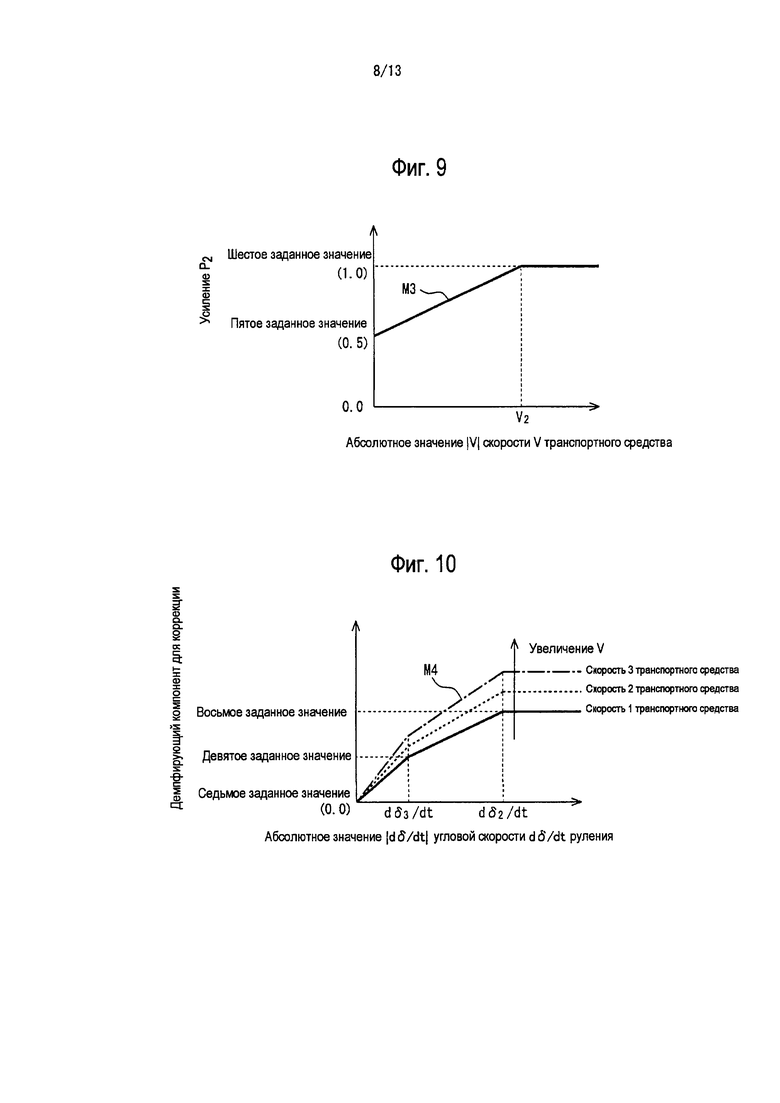
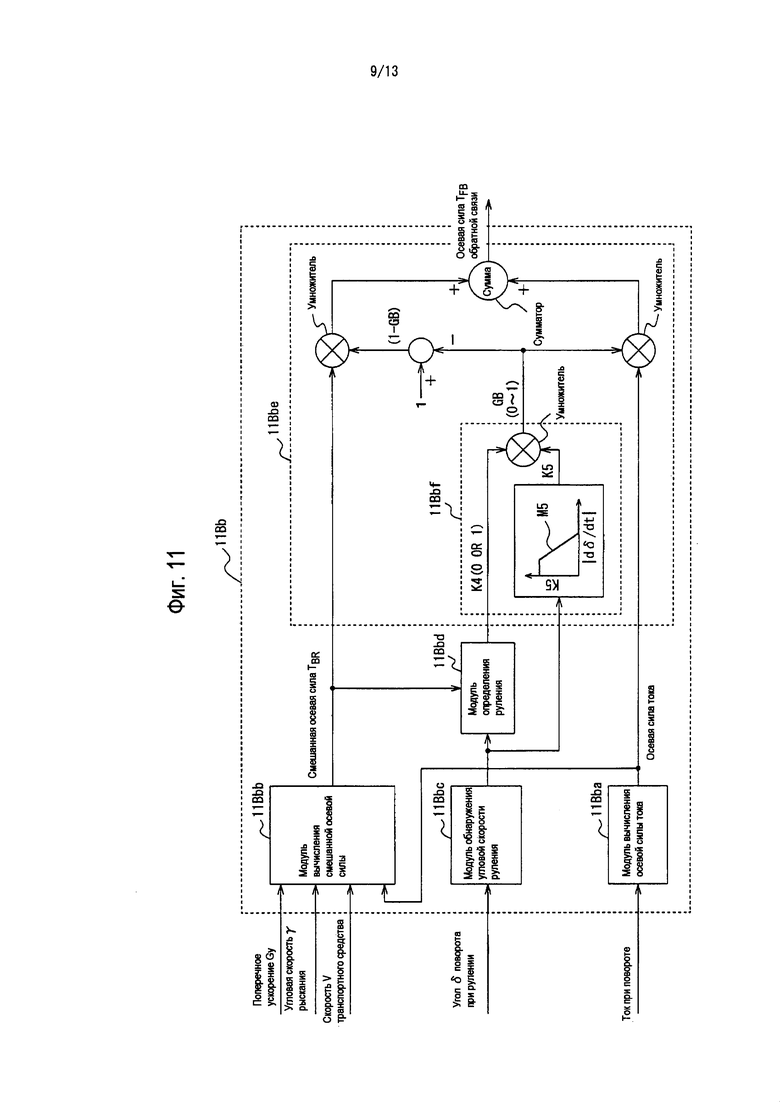
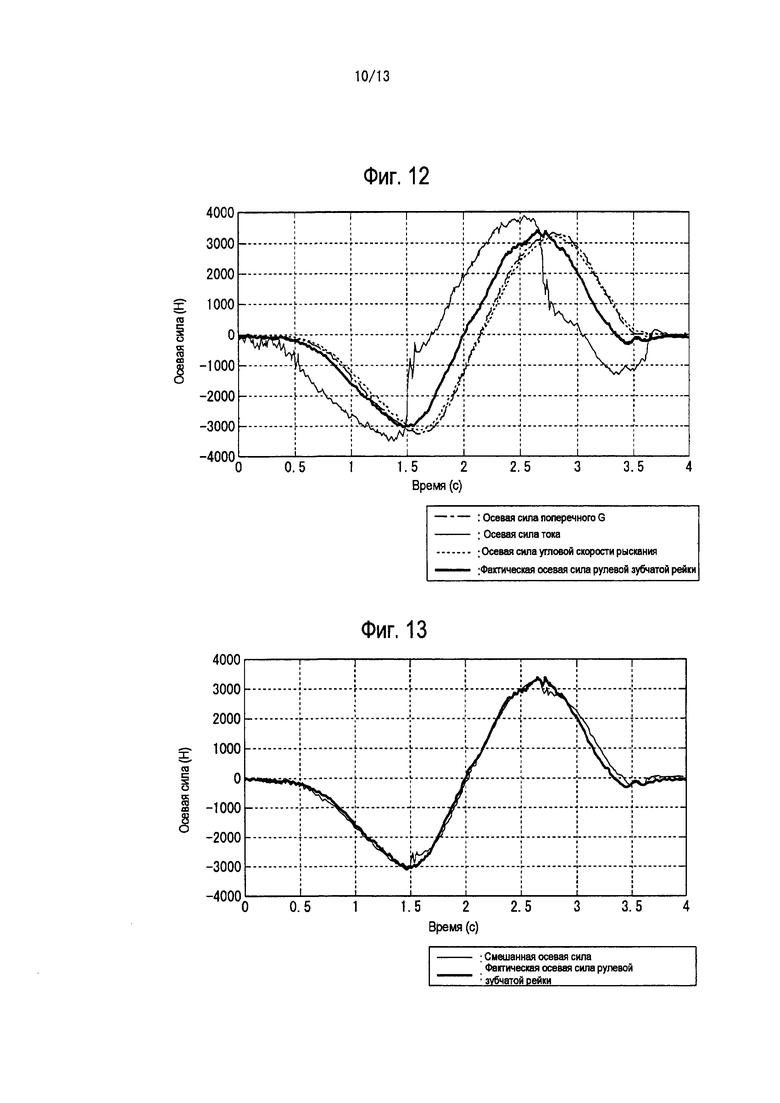
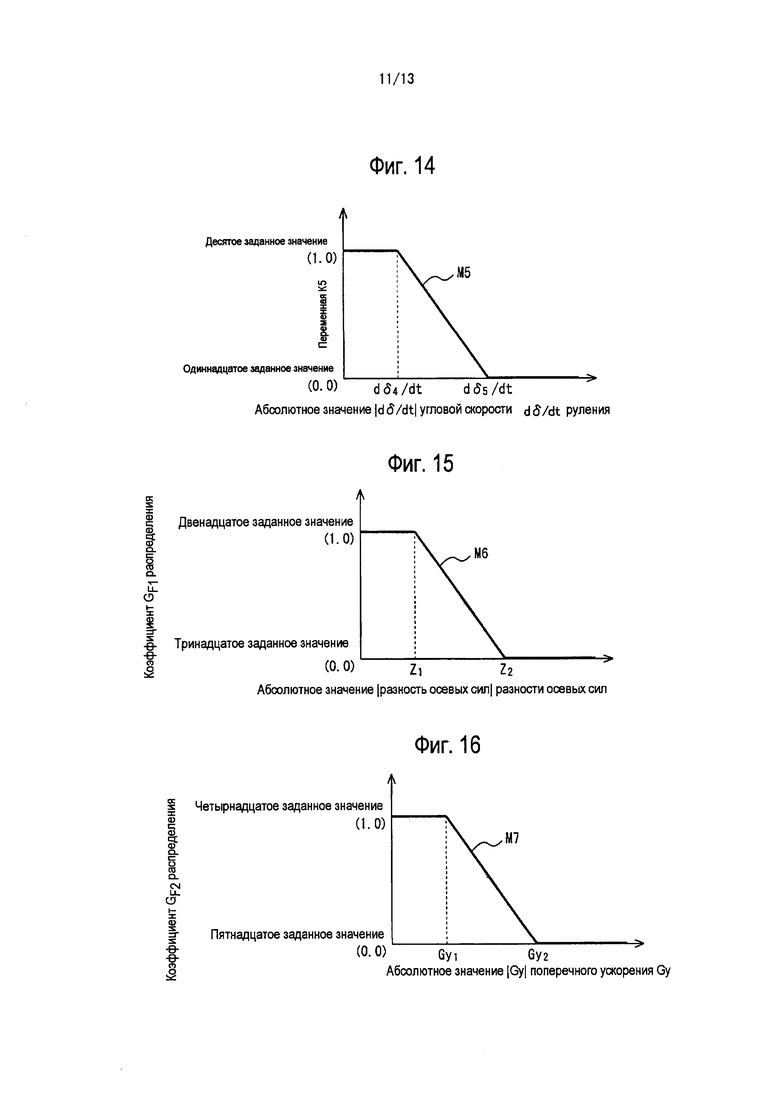
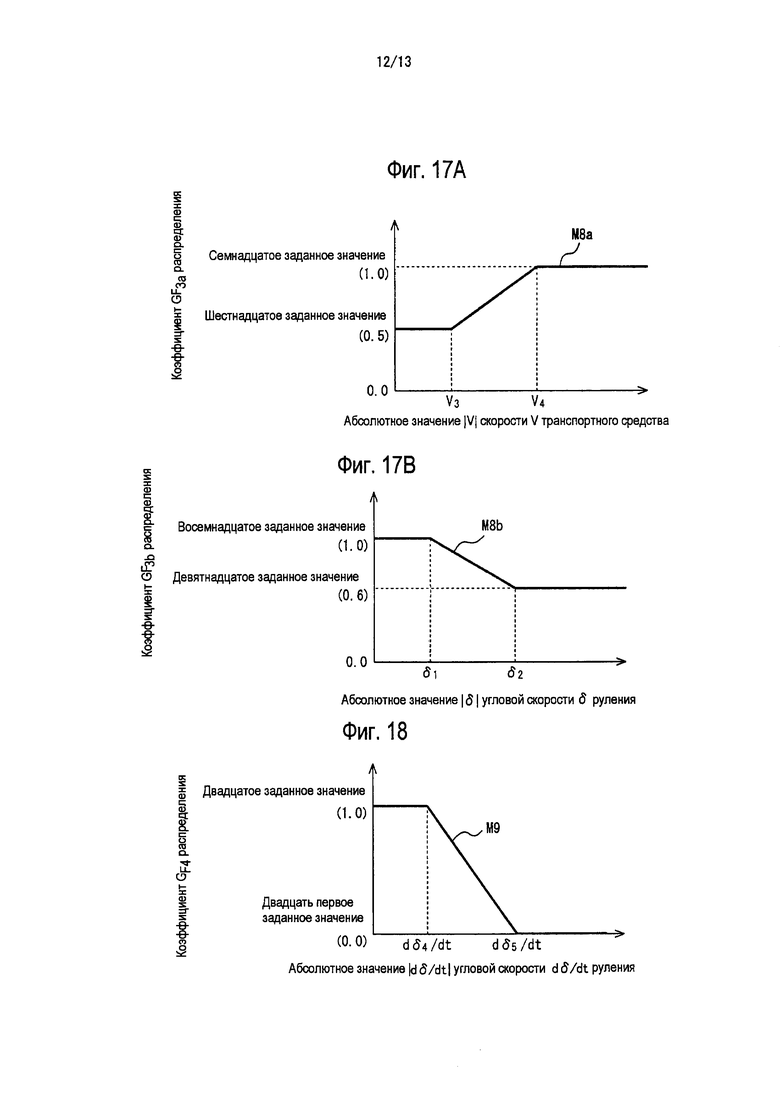
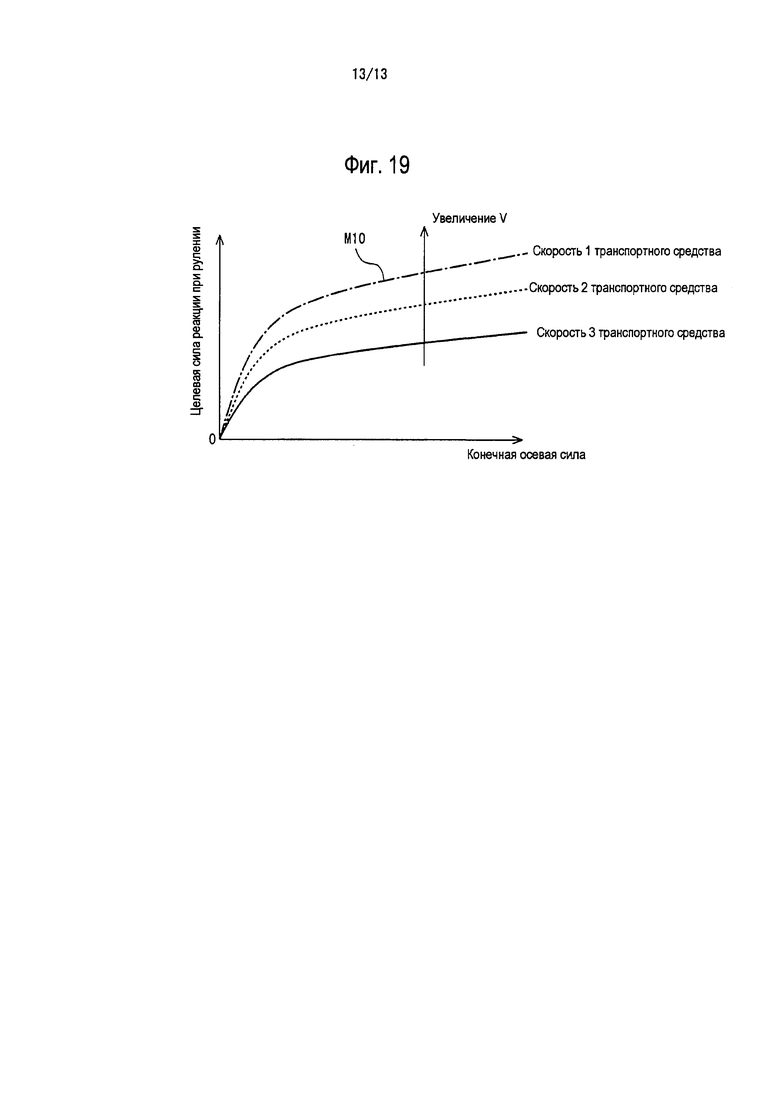
Предложено устройство управления рулением, в котором с использованием коэффициентов (GF1, GF2, GF3, GF4) распределения на основе разности осевых сил, поперечного ускорения (Gy), скорости (V) транспортного средства, угла (δ) поворота при рулении и угловой скорости (dδ/dt) руления, модуль (11) вычисления управляющих параметров распределяет осевую силу (TFF) прямой связи и осевую силу (TFB) обратной связи и задает конечную осевую силу. Модуль (11) вычисления управляющих параметров прикладывает силу реакции при рулении на основе заданной конечной осевой силы. Предложены также устройства управления рулением. Достигается обеспечение возможности приложения более надлежащей силы реакции при рулении. 5 н.п. ф-лы, 19 ил.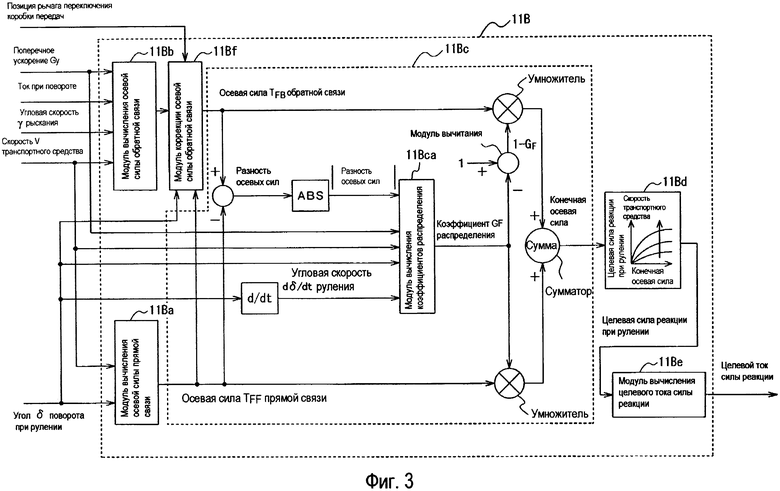
1. Устройство управления рулением, содержащее:
- руль, механически отделенный от управляемых колес;
- модуль обнаружения угла поворота при рулении, выполненный с возможностью обнаруживать угол поворота руля при рулении;
- поворотный привод, выполненный с возможностью поворачивать управляемые колеса согласно углу поворота при рулении, обнаруженному посредством модуля обнаружения угла поворота при рулении;
- модуль вычисления осевой силы прямой связи, выполненный с возможностью вычислять осевую силу прямой связи, которая представляет собой силу, сформированную в системе рулевого управления, на основе угла поворота при рулении, обнаруженного посредством модуля обнаружения угла поворота при рулении;
- модуль обнаружения величин, характеризующих состояние, выполненный с возможностью обнаруживать величину, характеризующую состояние транспортного средства, которая изменяется в зависимости от поперечной силы на шинах, прикладываемой к управляемым колесам;
- модуль вычисления осевой силы обратной связи, выполненный с возможностью вычислять осевую силу обратной связи, которая представляет собой силу, сформированную в системе рулевого управления, на основе величины, характеризующей состояние транспортного средства, обнаруженной посредством модуля обнаружения величин, характеризующих состояние;
- модуль задания конечной осевой силы, выполненный с возможностью задавать конечную осевую силу, которая представляет собой силу, сформированную в системе рулевого управления, посредством распределения осевой силы прямой связи, вычисленной посредством модуля вычисления осевой силы прямой связи, и осевой силы обратной связи, вычисленной посредством модуля вычисления осевой силы обратной связи; и
- привод силы реакции, выполненный с возможностью прикладывать силу реакции при рулении на основе конечной осевой силы, заданной посредством модуля задания конечной осевой силы,
- при этом модуль задания конечной осевой силы выполнен с возможностью задавать коэффициент распределения осевой силы прямой связи меньшим в случае, если имеется разность осевых сил между осевой силой прямой связи и осевой силой обратной связи, по сравнению с коэффициентом распределения в случае, если отсутствует разность осевых сил.
2. Устройство управления рулением, содержащее:
- руль, механически отделенный от управляемых колес;
- модуль обнаружения угла поворота при рулении, выполненный с возможностью обнаруживать угол поворота руля при рулении;
- поворотный привод, выполненный с возможностью поворачивать управляемые колеса согласно углу поворота при рулении, обнаруженному посредством модуля обнаружения угла поворота при рулении;
- модуль вычисления осевой силы прямой связи, выполненный с возможностью вычислять осевую силу прямой связи, которая представляет собой силу, сформированную в системе рулевого управления, на основе угла поворота при рулении, обнаруженного посредством модуля обнаружения угла поворота при рулении;
- модуль обнаружения величин, характеризующих состояние, выполненный с возможностью обнаруживать величину, характеризующую состояние транспортного средства, которая изменяется в зависимости от поперечной силы на шинах, прикладываемой к управляемым колесам;
- модуль вычисления осевой силы обратной связи, выполненный с возможностью вычислять осевую силу обратной связи, которая представляет собой силу, сформированную в системе рулевого управления, на основе величины, характеризующей состояние транспортного средства, обнаруженной посредством модуля обнаружения величин, характеризующих состояние;
- модуль задания конечной осевой силы, выполненный с возможностью задавать конечную осевую силу, которая представляет собой силу, сформированную в системе рулевого управления, посредством распределения осевой силы прямой связи, вычисленной посредством модуля вычисления осевой силы прямой связи, и осевой силы обратной связи, вычисленной посредством модуля вычисления осевой силы обратной связи;
- привод силы реакции, выполненный с возможностью прикладывать силу реакции при рулении на основе конечной осевой силы, заданной посредством модуля задания конечной осевой силы; и
- модуль обнаружения поперечного ускорения, выполненный с возможностью обнаруживать поперечное ускорение, прикладываемое к транспортному средству,
- при этом в случае, если абсолютное значение поперечного ускорения равно или превышает заданное значение, модуль задания конечной осевой силы выполнен с возможностью задавать коэффициент распределения осевой силы прямой связи меньшим, чем коэффициент распределения в случае, если абсолютное значение поперечного ускорения меньше заданного значения.
3. Устройство управления рулением, содержащее:
- руль, механически отделенный от управляемых колес;
- модуль обнаружения угла поворота при рулении, выполненный с возможностью обнаруживать угол поворота руля при рулении;
- поворотный привод, выполненный с возможностью поворачивать управляемые колеса согласно углу поворота при рулении, обнаруженному посредством модуля обнаружения угла поворота при рулении;
- модуль вычисления осевой силы прямой связи, выполненный с возможностью вычислять осевую силу прямой связи, которая представляет собой силу, сформированную в системе рулевого управления, на основе угла поворота при рулении, обнаруженного посредством модуля обнаружения угла поворота при рулении;
- модуль обнаружения величин, характеризующих состояние, выполненный с возможностью обнаруживать величину, характеризующую состояние транспортного средства, которая изменяется в зависимости от поперечной силы на шинах, прикладываемой к управляемым колесам;
- модуль вычисления осевой силы обратной связи, выполненный с возможностью вычислять осевую силу обратной связи, которая представляет собой силу, сформированную в системе рулевого управления, на основе величины, характеризующей состояние транспортного средства, обнаруженной посредством модуля обнаружения величин, характеризующих состояние;
- модуль задания конечной осевой силы, выполненный с возможностью задавать конечную осевую силу, которая представляет собой силу, сформированную в системе рулевого управления, посредством распределения осевой силы прямой связи, вычисленной посредством модуля вычисления осевой силы прямой связи, и осевой силы обратной связи, вычисленной посредством модуля вычисления осевой силы обратной связи;
- привод силы реакции, выполненный с возможностью прикладывать силу реакции при рулении на основе конечной осевой силы, заданной посредством модуля задания конечной осевой силы; и
- модуль обнаружения скорости транспортного средства, выполненный с возможностью обнаруживать скорость транспортного средства,
- при этом в случае, если абсолютное значение скорости транспортного средства меньше заданного значения, модуль задания конечной осевой силы выполнен с возможностью задавать коэффициент распределения осевой силы прямой связи меньшим, чем коэффициент распределения в случае, если абсолютное значение скорости транспортного средства равно или превышает заданное значение.
4. Устройство управления рулением, содержащее:
- руль, механически отделенный от управляемых колес;
- модуль обнаружения угла поворота при рулении, выполненный с возможностью обнаруживать угол поворота руля при рулении;
- поворотный привод, выполненный с возможностью поворачивать управляемые колеса согласно углу поворота при рулении, обнаруженному посредством модуля обнаружения угла поворота при рулении;
- модуль вычисления осевой силы прямой связи, выполненный с возможностью вычислять осевую силу прямой связи, которая представляет собой силу, сформированную в системе рулевого управления, на основе угла поворота при рулении, обнаруженного посредством модуля обнаружения угла поворота при рулении;
- модуль обнаружения величин, характеризующих состояние, выполненный с возможностью обнаруживать величину, характеризующую состояние транспортного средства, которая изменяется в зависимости от поперечной силы на шинах, прикладываемой к управляемым колесам;
- модуль вычисления осевой силы обратной связи, выполненный с возможностью вычислять осевую силу обратной связи, которая представляет собой силу, сформированную в системе рулевого управления, на основе величины, характеризующей состояние транспортного средства, обнаруженной посредством модуля обнаружения величин, характеризующих состояние;
- модуль задания конечной осевой силы, выполненный с возможностью задавать конечную осевую силу, которая представляет собой силу, сформированную в системе рулевого управления, посредством распределения осевой силы прямой связи, вычисленной посредством модуля вычисления осевой силы прямой связи, и осевой силы обратной связи, вычисленной посредством модуля вычисления осевой силы обратной связи; и
- привод силы реакции, выполненный с возможностью прикладывать силу реакции при рулении на основе конечной осевой силы, заданной посредством модуля задания конечной осевой силы,
- при этом в случае, если абсолютное значение угла поворота при рулении равно или превышает заданное значение, модуль задания конечной осевой силы выполнен с возможностью задавать коэффициент распределения осевой силы прямой связи меньшим, чем коэффициент распределения в случае, если абсолютное значение угла поворота при рулении меньше заданного значения.
5. Устройство управления рулением, содержащее:
- руль, механически отделенный от управляемых колес;
- модуль обнаружения угла поворота при рулении, выполненный с возможностью обнаруживать угол поворота руля при рулении;
- поворотный привод, выполненный с возможностью поворачивать управляемые колеса согласно углу поворота при рулении, обнаруженному посредством модуля обнаружения угла поворота при рулении;
- модуль вычисления осевой силы прямой связи, выполненный с возможностью вычислять осевую силу прямой связи, которая представляет собой силу, сформированную в системе рулевого управления, на основе угла поворота при рулении, обнаруженного посредством модуля обнаружения угла поворота при рулении;
- модуль обнаружения величин, характеризующих состояние, выполненный с возможностью обнаруживать величину, характеризующую состояние транспортного средства, которая изменяется в зависимости от поперечной силы на шинах, прикладываемой к управляемым колесам;
- модуль вычисления осевой силы обратной связи, выполненный с возможностью вычислять осевую силу обратной связи, которая представляет собой силу, сформированную в системе рулевого управления, на основе величины, характеризующей состояние транспортного средства, обнаруженной посредством модуля обнаружения величин, характеризующих состояние;
- модуль задания конечной осевой силы, выполненный с возможностью задавать конечную осевую силу, которая представляет собой силу, сформированную в системе рулевого управления, посредством распределения осевой силы прямой связи, вычисленной посредством модуля вычисления осевой силы прямой связи, и осевой силы обратной связи, вычисленной посредством модуля вычисления осевой силы обратной связи;
- привод силы реакции, выполненный с возможностью прикладывать силу реакции при рулении на основе конечной осевой силы, заданной посредством модуля задания конечной осевой силы; и
- модуль обнаружения угловой скорости руления, выполненный с возможностью обнаруживать угловую скорость руления руля,
- при этом в случае, если абсолютное значение угловой скорости руления равно или превышает заданное значение, модуль задания конечной осевой силы выполнен с возможностью задавать коэффициент распределения осевой силы прямой связи меньшим, чем коэффициент распределения в случае, если абсолютное значение угловой скорости руления меньше заданного значения.
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |

