ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Настоящее раскрытие относится к устройству управления рулением из системы рулевого управления по проводам, в которой руль и управляемые колеса механически отделены друг от друга.
УРОВЕНЬ ТЕХНИКИ
[0002] В качестве технологии устройства управления рулением, например, описан предшествующий уровень техники в патентном документе 1.
В этой технологии, сила реакции при рулении формируется на основе осевой силы зубчатой рейки, действующей на рулевую зубчатую рейку, так что поперечная сила на шинах, действующая на шины, отражается на силе реакции при рулении.
СПИСОК БИБЛИОГРАФИЧЕСКИХ ССЫЛОК
ПАТЕНТНЫЕ ДОКУМЕНТЫ
[0003] PTL 1. JP 2000-108914 A
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
ТЕХНИЧЕСКАЯ ЗАДАЧА
[0004] Здесь, в вышеописанной технологии, сила реакции при рулении формируется на основе осевой силы зубчатой рейки, и, соответственно, требуется датчик осевой силы, который обнаруживает осевую силу зубчатой рейки. Тем не менее, датчик осевой силы является относительно дорогим. Следовательно, имеется вероятность того, что могут возрастать затраты на изготовление устройства управления рулением.
Настоящее раскрытие осуществлено посредством заострения внимания на таком аспекте и имеет цель в обеспечении возможности подавлять увеличение затрат на изготовление.
РЕШЕНИЕ ЗАДАЧИ
[0005] Чтобы разрешать вышеописанную проблему, в одном варианте осуществления настоящего раскрытия, текущая осевая сила рулевой зубчатой рейки вычисляется на основе тока при повороте. Кроме того, в аспекте настоящего раскрытия, осевая сила поперечного G рулевой зубчатой рейки вычисляется на основе поперечного ускорения. Затем в аспекте настоящего раскрытия, сила реакции при рулении вычисляется на основе текущей осевой силы во время операции увеличивающегося руления руля, и сила реакции при рулении вычисляется на основе текущей осевой силы и осевой силы поперечного G во время операции возвратного руления руля.
ПРЕИМУЩЕСТВА ИЗОБРЕТЕНИЯ
[0006] В одном варианте осуществления настоящего раскрытия, приведение в действие актуатора силы реакции вычисляется на основе результатов обнаружения датчиков, предоставленных в общем транспортном средстве, причем результаты обнаружения включают в себя ток при повороте, поперечное ускорение и т.п. Следовательно, в одном варианте осуществления настоящего раскрытия, необязательно, чтобы устройство управления рулением включало в себя выделенный датчик, и может подавляться увеличение затрат на изготовление.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0007] Фиг. 1 является концептуальной схемой, иллюстрирующей конфигурацию транспортного средства A.
Фиг. 2 является блок-схемой, иллюстрирующей конфигурацию модуля 11 вычисления параметров управления.
Фиг. 3 является блок-схемой, иллюстрирующей конфигурацию модуля 11B вычисления целевого тока силы реакции.
Фиг. 4 является блок-схемой, иллюстрирующей конфигурацию модуля 11Ba вычисления осевой силы прямой связи.
Фиг. 5 является схемой, иллюстрирующей коэффициенты формулы вычисления для осевой силы Th ведущей шестерни.
Фиг. 6 является графиком, иллюстрирующим карту M1 управления.
Фиг. 7 является графиком, иллюстрирующим карту M2 управления.
Фиг. 8 является графиком, иллюстрирующим взаимосвязь между углом δ поворота при рулении и силой реакции при рулении.
Фиг. 9 является графиком, иллюстрирующим карту M3 управления.
Фиг. 10 является графиком, иллюстрирующим карту M4 управления.
Фиг. 11 является блок-схемой, иллюстрирующей конфигурацию модуля 11Bb вычисления осевой силы обратной связи.
Фиг. 12 является графиком, иллюстрирующим осевую силу поперечного G, текущую осевую силу, осевую силу в зависимости от скорости относительно вертикальной оси и фактическую осевую силу рулевой зубчатой рейки.
Фиг. 13 является графиком, иллюстрирующим смешанную осевую силу TBR и фактическую осевую силу рулевой зубчатой рейки.
Фиг. 14 является графиком, иллюстрирующим карту M5 управления.
Фиг. 15 является графиком, иллюстрирующим карту M6 управления.
Фиг. 16 является графиком, иллюстрирующим карту M7 управления.
Фиг. 17A и 17B являются графиками, иллюстрирующими карты M8a и M8b управления.
Фиг. 18 является графиком, иллюстрирующим карту M9 управления.
Фиг. 19 является графиком, иллюстрирующим карту M10 управления.
Фиг. 20 является схемой, иллюстрирующей операции устройства управления рулением транспортного средства A.
Подробное описание вариантов осуществления
[0008] Далее приводится описание вариантов осуществления настоящего раскрытия со ссылкой на чертежи.
КОНФИГУРАЦИЯ
Транспортное средство A в одном варианте осуществления настоящего раскрытия представляет собой транспортное средство, включающее в себя устройство управления рулением из системы рулевого управления по проводам, в которой руль 1 и передние колеса 2 (в дальнейшем в этом документе, называемые "управляемыми колесами") механически отделены друг от друга.
Фиг. 1 является концептуальной схемой, иллюстрирующей конфигурацию транспортного средства A в одном варианте осуществления настоящего раскрытия.
Как проиллюстрировано на фиг. 1, транспортное средство A включает в себя датчик 3 угла поворота при рулении, датчик 4 угла поворота, датчик 5 скорости транспортного средства, датчик 6 поперечного G и датчик 7 скорости относительно вертикальной оси.
Датчик 3 угла поворота при рулении обнаруживает угол δ поворота при рулении руля 1. В качестве способа для обнаружения угла δ поворота при рулении, например, может использоваться способ вычисления, который основан на величине вращения рулевого вала. Затем датчик 3 угла поворота при рулении выводит сигнал (в дальнейшем в этом документе, также называемый "сигналом обнаружения"), указывающий результат обнаружения, в модуль 11 вычисления параметров управления, который описывается ниже.
[0009] Датчик 4 угла поворота выполнен с возможностью обнаруживать угол θ поворота управляемых колес 2. В качестве способа для обнаружения угла θ поворота, например, может использоваться способ вычисления, который основан на величине перемещения зубчатой рейки рулевой зубчатой рейки. Затем датчик 4 угла поворота выводит сигнал обнаружения в модуль 11 вычисления параметров управления.
Датчик 5 скорости транспортного средства выполнен с возможностью обнаруживать скорость V транспортного средства транспортного средства A. Затем датчик 5 скорости транспортного средства выводит сигнал обнаружения в модуль 11 вычисления параметров управления.
Датчик 6 поперечного G выполнен с возможностью обнаруживать поперечное ускорение Gy, действующее на транспортное средство A (т.е. функцию состояния транспортного средства A, которая варьируется за счет поперечной силы Fd на шинах, действующей на управляемые колеса 2). Затем датчик 6 поперечного G выводит сигнал обнаружения в модуль 11 вычисления параметров управления.
Датчик 7 скорости относительно вертикальной оси выполнен с возможностью обнаруживать скорость ϒ относительно вертикальной оси транспортного средства A (т.е. функцию состояния транспортного средства A, которая варьируется посредством поперечной силы Fd на шинах, действующей на управляемые колеса 2). Затем датчик 7 скорости относительно вертикальной оси выводит сигнал обнаружения в модуль 11 вычисления параметров управления.
Следует отметить, что датчик 6 поперечного G и датчик 7 скорости относительно вертикальной оси располагаются в подрессоренном корпусе (кузове транспортного средства).
[0010] Кроме того, транспортное средство A включает в себя модуль 8 управления при повороте и модуль 9 управления силой реакции.
Модуль 8 управления при повороте выполнен с возможностью включать в себя поворотный электромотор 8A, модуль 8B обнаружения тока при повороте и модуль 8C приведения в действие поворотного электромотора.
Поворотный электромотор 8A соединяется с валом 10 шестерни через редуктор. Затем поворотный электромотор 8A приводится в действие посредством модуля 8C приведения в действие поворотного электромотора и перемещает рулевую зубчатую рейку из стороны в сторону через вал 10 шестерни. Таким образом, поворотный электромотор 8A рулит управляемыми колесами 2. В качестве способа для приведения в действие поворотного электромотора 8A, например, может использоваться способ управления током, протекающим через поворотный электромотор 8A (в дальнейшем в этом документе, этот ток также упоминается как ток при повороте).
Модуль 8B обнаружения тока при повороте выполнен с возможностью обнаруживать ток при повороте (функцию состояния транспортного средства A, которая варьируется посредством поперечной силы Fd на шинах, действующей на управляемые колеса 2). Затем модуль 8B обнаружения тока при повороте выводит сигнал обнаружения в модуль 8C приведения в действие поворотного электромотора и модуль 11 вычисления параметров управления.
Модуль 8C приведения в действие поворотного электромотора выполнен с возможностью управлять током при повороте поворотного электромотора 8A на основе целевого тока при повороте, вычисленного посредством модуля 11 вычисления параметров управления, так что ток при повороте, обнаруженный посредством модуля 8B обнаружения тока при повороте, может совпадать с соответствующим целевым током при повороте. Таким образом, модуль 8C приведения в действие поворотного электромотора приводит в действие поворотный электромотор 8A. Целевой ток при повороте является целевым значением тока, протекающего через поворотный электромотор 8A.
[0011] Модуль 9 управления силой реакции выполнен с возможностью включать в себя электромотор 9A для формирования силы реакции, модуль 9B обнаружения тока силы реакции и модуль 9C приведения в действие электромотора для формирования силы реакции.
Электромотор 9A для формирования силы реакции соединяется с рулевым валом через редуктор. Затем электромотор 9A для формирования силы реакции приводится в действие посредством модуля 9C приведения в действие электромотора для формирования силы реакции и прикладывает вращательный крутящий момент к рулю 1 через рулевой вал. Таким образом, электромотор 9A для формирования силы реакции формирует силу реакции при рулении. В качестве способа для приведения в действие электромотора 9A для формирования силы реакции, например, может использоваться способ управления током, протекающим через электромотор 9A для формирования силы реакции (в дальнейшем в этом документе, этот ток также упоминается как ток силы реакции).
Модуль 9B обнаружения тока силы реакции выполнен с возможностью обнаруживать ток силы реакции. Затем модуль 9B обнаружения тока силы реакции выводит сигнал обнаружения в модуль 9C приведения в действие электромотора для формирования силы реакции и модуль 11 вычисления параметров управления.
Модуль 9C приведения в действие электромотора для формирования силы реакции выполнен с возможностью управлять током силы реакции электромотора 9A для формирования силы реакции на основе целевого тока силы реакции, вычисленного посредством модуля 11 вычисления параметров управления, так что ток силы реакции, обнаруженный посредством модуля 9B обнаружения тока силы реакции, может совпадать с соответствующим целевым током силы реакции. Таким образом, модуль 9C приведения в действие электромотора для формирования силы реакции приводит в действие электромотор 9A для формирования силы реакции. Целевой ток силы реакции является целевым значением тока, протекающего через электромотор 9A для формирования силы реакции.
[0012] Транспортное средство A включает в себя модуль 11 вычисления параметров управления.
Фиг. 2 является блок-схемой, иллюстрирующей конфигурацию модуля 11 вычисления параметров управления.
Как проиллюстрировано на фиг. 2, модуль 11 вычисления параметров управления выполнен с возможностью включать в себя модуль 11A вычисления целевого угла поворота, модуль 11B вычисления целевого тока силы реакции и модуль 11C вычисления целевого тока при повороте.
Модуль 11A вычисления целевого угла поворота выполнен с возможностью вычислять целевой угол θ* поворота, который является целевым значением угла θ поворота (угла поворота вала 10 шестерни), на основе угла δ поворота при рулении, обнаруженного посредством датчика 3 угла поворота при рулении, и на основе скорости V транспортного средства, обнаруженной посредством датчика 5 скорости транспортного средства. В качестве способа для вычисления целевого угла поворота θ*, например, предусмотрен способ использования умноженного значения угла δ поворота при рулении и регулируемого передаточного отношения угла δ поворота при рулении и угла θ поворота. Затем модуль 11A вычисления целевого угла поворота выводит результат вычисления в модуль 11B вычисления целевого тока силы реакции.
Модуль 11B вычисления целевого тока силы реакции выполнен с возможностью вычислять целевой ток силы реакции на основе целевого угла θ* поворота, вычисленного посредством целевого модуля вычисления угла поворота 11A, на основе скорости V транспортного средства, обнаруженной посредством датчика 5 скорости транспортного средства, и на основе тока при повороте, обнаруженного посредством модуля 8B обнаружения тока при повороте. Затем модуль 11B вычисления целевого тока силы реакции выводит результат вычисления в модуль 9 управления силой реакции (модуль 9C приведения в действие электромотора для формирования силы реакции).
[0013] Здесь, приводится описание конфигурации модуля 11B вычисления целевого тока силы реакции.
Фиг. 3 является блок-схемой, иллюстрирующей конфигурацию модуля 11B вычисления целевого тока силы реакции.
Как проиллюстрировано на фиг. 3, модуль 11B вычисления целевого тока силы реакции выполнен с возможностью включать в себя модуль 11Ba вычисления осевой силы прямой связи, модуль 11Bb вычисления осевой силы обратной связи, модуль 11Bc вычисления конечной осевой силы, модуль 11Bd преобразования силы реакции при рулении и осевой силы и модуль 11Be вычисления целевого тока силы реакции.
Фиг. 4 является блок-схемой, иллюстрирующей конфигурацию модуля 11Ba вычисления осевой силы прямой связи.
Как проиллюстрировано на фиг. 4, модуль 11Ba вычисления осевой силы прямой связи вычисляет осевую силу TFF прямой связи согласно формуле (5), которая описывается ниже, на основе угла δ поворота при рулении, обнаруженного посредством датчика 3 угла поворота при рулении, и на основе скорости V транспортного средства, обнаруженной посредством датчика 5 скорости транспортного средства. Затем модуль 11Ba вычисления осевой силы прямой связи выполнен с возможностью выводить результат вычисления в модуль 11Bc вычисления конечной осевой силы (см. фиг. 2).
[0014] Фиг. 5 является схемой, иллюстрирующей коэффициенты формулы вычисления для осевой силы Th ведущей шестерни.
Здесь, реляционная формула между углом θ поворота шестерни для прокручивания коленчатого вала и осевой силой Th ведущей шестерни представлена посредством следующей формулы (1) на основе уравнения движения транспортного средства, включающего в себя механизм рулевого управления, в котором руль 1 и управляемые колеса 2 механически соединяются между собой. В качестве угла θ поворота шестерни для прокручивания коленчатого вала, например, предусмотрен угол поворота вала 10 шестерни. В качестве угла поворота вала 10 шестерни, например, предусмотрено умноженное значение угла δ поворота при рулении и регулируемого передаточного отношения угла δ поворота при рулении и угла θ поворота. Кроме того, в качестве осевой силы Th ведущей шестерни, например, предусмотрена сила реакции при рулении, прикладываемая к рулю 1. Первый член правой стороны следующей формулы (1) представляет собой демпфирующий член, представляющий компонент, который основан на угловой скорости dθ/dt шестерни для прокручивания коленчатого вала, из компонентов, составляющих осевую силу Th ведущей шестерни. Кроме того, второй член правой стороны представляет собой инерционный член, представляющий компонент, который основан на угловом ускорении шестерни для прокручивания коленчатого вала d2θ/dt2, из компонентов, составляющих осевую силу Th ведущей шестерни. Кроме того, третий член правой стороны представляет собой пропорциональный член, представляющий компонент, который основан на поперечной силе Fd на шинах (углу θ поворота шестерни для прокручивания коленчатого вала), из компонентов, составляющих осевую силу Th ведущей шестерни.
Th=Ks(Jrs2+Cr*s)/(Jr*s2+(Cr+Cs)s+Ks)*θ+Cs (Jrs3+Cr* s2)/(Jr*s2+(Cr+Cs)s+Ks)*θ+(Ks+Cs*s)/(Jr*s2+(Cr+Cs)s+Ks)*Fd (1)
Следует отметить, что Ks является жесткостью ведущей шестерни, Cs является вязкостью ведущей шестерни, Jr является инерцией зубчатой рейки, и Cr является вязкостью зубчатой рейки, как показано на фиг. 5.
[0015] Кроме того, в вышеописанной формуле (1), второй член в правой стороне, т.е. инерционный член содержит множество компонентов шума и накладывает вибрации на такой результат вычисления осевой силы Th ведущей шестерни, и, соответственно, соответствующий инерционный член удаляется в одном варианте осуществления. Кроме того, поперечная сила Fd на шинах может задаваться таким образом, что она зависит от угла θ поворота шестерни для прокручивания коленчатого вала и скорости V транспортного средства и может представляться как Fd=f(V)*θ. В качестве f(V), например, предусмотрена функция, изменяющаяся в ответ на скорость V транспортного средства. Следовательно, вышеописанная формула (1) может представляться как следующая формула (2).
Th=Ks(Jrs2+Cr*s)/(Jr*s2+(Cr+Cs)s+Ks)*θ+(Ks+Cs*s)/(Jr*s2+(Cr+Cs)s+Ks)*f(V)*θ (2)
[0016] Фиг. 6 является графиком, иллюстрирующим карту M1 управления.
Здесь, в качестве способа для задания такой переменной f(V), например, может использоваться способ считывания переменной f(V), которая соответствует абсолютному значению скорости V транспортного средства, из карты M1 управления. В качестве карты M1 управления, например, предусмотрена карта, в которой зарегистрирована переменная f(V), соответствующая абсолютному значению скорости V транспортного средства. В частности, как проиллюстрировано на фиг. 6, карта M1 управления задает переменную f(V) равной первому заданному значению (например, 0,0) в случае, если абсолютное значение скорости V транспортного средства равно 0. Кроме того, в диапазоне, в котором абсолютное значение скорости V транспортного средства находится в пределах первой заданной скорости V1 транспортного средства (>0), переменная f(V) задается равной второму заданному значению (>первого заданного значения; например, 1,0) независимо от абсолютной величины скорости V транспортного средства. Кроме того, в диапазоне, в котором абсолютное значение скорости V транспортного средства равно 0 или более и меньше первой заданной скорости V1 транспортного средства, карта M1 управления линейно увеличивает переменную f(V) в ответ на абсолютное значение угловой скорости dθ/dt поворота В частности, в диапазоне, в котором абсолютное значение скорости V транспортного средства равно 0 или более и меньше первой заданной скорости V1 транспортного средства, карта M1 управления задает переменную f(V) в соответствии с линейной функцией, представляющей взаимосвязь между абсолютным значением скорости V транспортного средства и переменной f(V). В линейной функции переменная f(V) задается равной первому заданному значению (0,0) в случае, если абсолютное значение скорости V транспортного средства равно 0, и переменная f(V) задается равной второму заданному значению (1,0) в случае, если абсолютное значение скорости V транспортного средства составляет первую заданную скорость V1 транспортного средства. Таким образом, в случае если абсолютное значение скорости V транспортного средства меньше первой заданной скорости V1 транспортного средства, модуль 11Ba вычисления осевой силы прямой связи снижает (уменьшает) абсолютное значение пропорционального компонента по мере того, как становится меньше абсолютное значение скорости V транспортного средства. Между тем, в случае если абсолютное значение скорости V транспортного средства составляет первую заданную скорость V1 транспортного средства или больше, модуль 11Ba вычисления осевой силы прямой связи не уменьшает абсолютное значение пропорционального компонента независимо от абсолютной величины скорости V транспортного средства.
[0017] Кроме того, вышеописанная формула (2) может быть эквивалентно представлена в качестве следующей формулы (3).
Th=P(s+2*ζ*ωn) s/(s2+*ζ*ωn*s+ωn2) δ+I*(s+2*ζ*ωn)/(s2+2*ζ*ωn*s+ωn2)*f(V)*δ=P(s+2*ζ*ωn)/(s2+2*ζ*ωn*s+ωn2)dδ/dt+I*(s+2*ζ*ωn)/(s2+2*ζ*ωn*s+ωn2)*f(V)*δ (3)
Следует отметить, что P и I являются константами управления, ζ является коэффициентом затухания, и ωn является собственной частотой. В качестве способа для задания ζ и ωn, например, может использоваться способ задания ζ и ωn равным расчетным значениям и способ идентификации ζ и ωn из экспериментального результата.
Следовательно, осевая сила Th ведущей шестерни, т.е. сила реакции при рулении, сформированная в руле 1, может быть представлена посредством следующей формулы (4) на основе вышеописанной формулы (3).
Th=P(s+2*ζ*ωn)/(s2+2*ζ*ωn*s+ωn2)dδ/dt+I*(s+2*ζ*ωn)/(s2+2*ζ*ωωn*s+ωn2)*f(V)*δ (4)
[0018] Затем на основе вышеописанной формулы (4), т.е. на основе числовой формулы осевой силы Th ведущей шестерни, следующая формула (5) используется в качестве способа для вычисления осевой силы TFF прямой связи в одном варианте осуществления настоящего раскрытия.
TFF=P*P1*P2(s+2*ζ*ωn)/(s2+2*ζ*ωn*s+ωn2)dδ/dt+I*(s+2*ζ*ωn)/(s2+2*ζ*ωn*s+ωn2)* f(V)*δ + демпфирующий компонент для коррекции=демпфирующий компонент P1*P2+пропорциональный компонент + демпфирующий компонент для коррекции (5)
Следует отметить, что демпфирующий компонент составляет P(s+2*ζ*ωn)/(s2+2*ζ*ωn*s+ωn2)dδ/dt, и пропорциональный компонент составляет I*(s+2*ζ*ωn)/(s2+2*ζ*ωn*s+ωn2)*f(V)*δ. Кроме того, демпфирующий компонент для коррекции представляет собой демпфирующий компонент, который основан на угловой скорости dδ/dt руления, и формирует силу реакции при рулении в противоположном направлении относительно направления угловой скорости dδ/dt руления.
[0019] Фиг. 7 является графиком, иллюстрирующим карту M2 управления.
Здесь, в качестве способа для задания усиления P1, например, может использоваться способ считывания усиления P1, которое соответствует абсолютному значению угловой скорости dδ/dt руления, из карты M2 управления. В качестве карты M2 управления, например, предусмотрена карта, в которой зарегистрировано усиление P1, соответствующее абсолютному значению угловой скорости dδ/dt руления. В частности, как проиллюстрировано на фиг. 7, карта M2 управления задает усиление P1 равным третьему заданному значению (например, 1,0) в случае, если угловая скорость dδ/dt руления равна 0. Кроме того, в диапазоне, в котором абсолютное значение угловой скорости dδ/dt руления составляет первую заданную угловую скорость dδ1/dt руления (>0) или более, усиление P1 задается равным четвертому заданному значению (<третьего заданного значения; например, 0,5) независимо от абсолютной величины угловой скорости dδ/dt руления. Кроме того, в диапазоне, в котором абсолютное значение угловой скорости dδ/dt руления равно 0 или более и меньше первой заданной угловой скорости dδ1/dt руления, карта M2 управления линейно уменьшает усиление P1 в ответ на абсолютное значение угловой скорости dδ/dt руления. В частности, в диапазоне, в котором абсолютное значение угловой скорости dδ/dt руления равно 0 или более и меньше первой заданной угловой скорости dδ1/dt руления, карта M2 управления задает усиление P1 в соответствии с линейной функцией, представляющей взаимосвязь между абсолютным значением угловой скорости dδ/dt руления и усилением P1. В линейной функции усиление P1 задается равным третьему заданному значению (1,0) в случае, если угловая скорость dδ/dt руления равна 0, и усиление P1 задается равным четвертому заданному значению (0,5) в случае, если абсолютное значение угловой скорости dδ/dt руления составляет первую заданную угловую скорость dδ1/dt руления. Таким образом, в случае если абсолютное значение угловой скорости dδ/dt руления меньше первой заданной угловой скорости dδ1/dt руления, модуль 11Ba вычисления осевой силы прямой связи уменьшает (корректирует) абсолютное значение демпфирующего компонента по мере того, как становится больше абсолютное значение угловой скорости dδ/dt руления. Между тем, в случае если абсолютное значение угловой скорости dδ/dt руления составляет первую заданную угловую скорость dδ1/dt руления или больше, модуль 11Ba вычисления осевой силы прямой связи не корректирует абсолютное значение демпфирующего компонента на основе усиления P1 независимо от абсолютной величины угловой скорости dδ/dt руления.
[0020] Фиг. 8 является графиком, иллюстрирующим взаимосвязь между углом δ поворота при рулении и силой реакции при рулении. Этот график проиллюстрирован для каждого устройства управления рулением (для каждого механического устройства управления рулением, в котором руль 1 и управляемые колеса 2 механически зацепляются между собой, и для каждого устройства управления рулением из системы рулевого управления по проводам, в которой не учитывается насыщение демпфирующего компонента). В механическом устройстве управления рулением, по мере того, как увеличивается угловая скорость dδ/dt руления, насыщается демпфирующий компонент, содержащийся в силе реакции при рулении. Следовательно, в механическом устройстве управления рулением, как проиллюстрировано на фиг. 8, демпфирующий компонент насыщен, в силу чего форма фигуры Лиссажу, состоящей из угла δ поворота при рулении и силы реакции при рулении, становится постоянной независимо от абсолютной величины угловой скорости dδ/dt руления. Тем не менее, в устройстве управления рулением из системы рулевого управления по проводам, в которой не учитывается насыщение демпфирующего компонента, включенного в силу реакции при рулении, сила реакции при рулении продолжает увеличиваться в ответ на увеличение угловой скорости dδ/dt руления. Напротив, модуль 11 вычисления параметров управления в одном варианте осуществления настоящего раскрытия уменьшает абсолютное значение демпфирующего компонента по мере того, как становится больше абсолютное значение угловой скорости dδ/dt руления. Следовательно, модуль 11 вычисления параметров управления в одном варианте осуществления настоящего раскрытия может подавлять увеличение абсолютного значения демпфирующего компонента в случае, если угловая скорость dδ/dt руления является большой. Соответственно, модуль 11 вычисления параметров управления в одном варианте осуществления настоящего раскрытия может подавлять становление чрезмерным демпфирующего компонента. Таким образом, модуль 11 вычисления параметров управления в одном варианте осуществления настоящего раскрытия может передавать более надлежащее ощущение при рулении.
[0021] Фиг. 9 является графиком, иллюстрирующим карту M3 управления.
Кроме того, в качестве способа для задания усиления P2, например, может использоваться способ считывания усиления P2, которое соответствует абсолютному значению скорости V транспортного средства, из карты M3 управления. В качестве карты M3 управления, например, предусмотрена карта, в которой зарегистрировано усиление P2, соответствующее абсолютному значению скорости V транспортного средства. В частности, как проиллюстрировано на фиг. 9, карта M3 управления задает усиление P2 равным пятому заданному значению (например, 0,5) в случае, если абсолютное значение скорости V транспортного средства равно 0. Кроме того, в диапазоне, в котором абсолютное значение скорости V транспортного средства составляет вторую заданную скорость V2 транспортного средства (>0) или более, усиление P2 задается равным шестому заданному значению (>пятого заданного значения; например, 1,0) независимо от абсолютной величины скорости V транспортного средства. Кроме того, в диапазоне, в котором абсолютное значение скорости V транспортного средства равно 0 или более и меньше второй заданной скорости V2 транспортного средства, карта M3 управления линейно увеличивает усиление P2 в ответ на абсолютное значение скорости V транспортного средства. В частности, в диапазоне, в котором абсолютное значение скорости V транспортного средства равно 0 или более и меньше второй заданной скорости V2 транспортного средства, карта M3 управления задает усиление P2 в соответствии с линейной функцией, представляющей взаимосвязь между абсолютным значением скорости V транспортного средства и усилением P2. В линейной функции усиление P2 задается равным пятому заданному значению (0,5) в случае, если абсолютное значение скорости V транспортного средства равно 0, и усиление P2 задается равным шестому заданному значению (1,0) в случае, если абсолютное значение скорости V транспортного средства составляет вторую заданную скорость V2 транспортного средства. Таким образом, в случае если абсолютное значение скорости V транспортного средства меньше второй заданной скорости V2 транспортного средства, модуль 11Ba вычисления осевой силы прямой связи уменьшает (корректирует) абсолютное значение демпфирующего компонента по мере того, как становится меньше абсолютное значение скорости V транспортного средства. Между тем, в случае если абсолютное значение скорости V транспортного средства составляет вторую заданную скорость V2 транспортного средства или больше, модуль 11Ba вычисления осевой силы прямой связи не корректирует абсолютное значение демпфирующего компонента на основе усиления P2 независимо от абсолютной величины скорости V транспортного средства.
[0022] Как описано выше, модуль 11 вычисления параметров управления в одном варианте осуществления настоящего раскрытия уменьшает абсолютное значение демпфирующего компонента по мере того, как становится меньше абсолютное значение скорости V транспортного средства. Здесь, в механическом устройстве управления рулением, в котором руль 1 и управляемые колеса 2 механически зацепляются между собой, когда скорость V транспортного средства снижается, в таком случае поперечная сила Fd на шинах управляемых колес 2 снижается, и сила реакции при рулении снижается. Для этого модуль 11 вычисления параметров управления в одном варианте осуществления настоящего раскрытия уменьшает абсолютное значение демпфирующего компонента по мере того, как становится меньше абсолютное значение скорости V транспортного средства, и в силу этого может уменьшать силу реакции при рулении. Таким образом, модуль 11 вычисления параметров управления в одном варианте осуществления настоящего раскрытия может передавать более надлежащее ощущение при рулении.
[0023] Фиг. 10 является графиком, иллюстрирующим карту M4 управления.
Кроме того, в качестве способа для задания демпфирующего компонента для коррекции, например, может использоваться способ считывания демпфирующего компонента для коррекции, который соответствует абсолютному значению угловой скорости dδ/dt руления, из карты M4 управления. В качестве карты M2 управления, например, предусмотрена карта, в которой зарегистрирован демпфирующий компонент для коррекции, которая соответствует абсолютному значению угловой скорости dδ/dt руления. В частности, как проиллюстрировано на фиг. 10, карта M4 управления задается для каждой скорости V транспортного средства. Каждая карта M4 управления задает демпфирующий компонент для коррекции равным седьмому заданному значению (например, 0,0) в случае, если угловая скорость dδδ/dt руления равна 0. Кроме того, в диапазоне, в котором абсолютное значение угловой скорости dδ/dt руления составляет вторую заданную угловую скорость dδ2/dt руления (>0) или более, карта M4 управления задает демпфирующий компонент для коррекции равным восьмому заданному значению (постоянному значению) независимо от абсолютной величины угловой скорости dδ/dt руления. Кроме того, в диапазоне, в котором угловая скорость dδ/dt руления равна 0,0 или более, и абсолютное значение угловой скорости dδ/dt руления меньше третьей заданной угловой скорости dδ3/dt руления (0<dδ3/dt<dδ2/dt), карта M4 управления линейно увеличивает демпфирующий компонент для коррекции в ответ на абсолютное значение угловой скорости dδ/dt руления. В частности, в диапазоне, в котором абсолютное значение угловой скорости dδ/dt руления равно 0 или более и меньше третьей заданной угловой скорости dδ3/dt руления, каждая карта M4 управления задает демпфирующий компонент для коррекции в соответствии с линейной функцией, представляющей взаимосвязь между абсолютным значением угловой скорости dδ/dt руления и демпфирующим компонентом для коррекции. В линейной функции в случае, если абсолютное значение угловой скорости dδ/dt руления равно 0, демпфирующий компонент для коррекции задается равным седьмому заданному значению (0,0), и в случае, если абсолютное значение угловой скорости dδ/dt руления составляет третью заданную угловую скорость dδ3/dt руления, демпфирующий компонент для коррекции задается равным девятому заданному значению (0<девятое заданное значение<восьмое заданное значение). Кроме того, в диапазоне, в котором абсолютное значение угловой скорости dδ/dt руления составляет третью заданную угловую скорость dδ3/dt руления или более и меньше второй заданной угловой скорости dδ2/dt руления, каждая карта M4 управления линейно увеличивает демпфирующий компонент для коррекции в ответ на абсолютное значение угловой скорости dδ/dt руления. В частности, в диапазоне, в котором абсолютное значение угловой скорости dδ/dt руления составляет третью заданную угловую скорость dδ3/dt руления или более и меньше второй заданной угловой скорости dδ2/dt руления, карта M4 управления задает демпфирующий компонент для коррекции в соответствии с линейной функцией, представляющей взаимосвязь между абсолютным значением скорости V транспортного средства и демпфирующим компонентом для коррекции. В линейной функции демпфирующий компонент для коррекции задается равным девятому заданному значению в случае, если абсолютное значение угловой скорости dδ/dt руления составляет третью заданную угловую скорость dδ3/dt руления, и демпфирующий компонент для коррекции задается равным восьмому заданному значению в случае, если абсолютное значение угловой скорости dδ/dt руления составляет вторую заданную угловую скорость dδ2/dt руления. Таким образом, в случае если абсолютное значение угловой скорости dδ/dt руления меньше второй заданной угловой скорости dδ2/dt руления, модуль 11Ba вычисления осевой силы прямой связи увеличивает абсолютное значение демпфирующего компонента для коррекции по мере того, как становится больше абсолютное значение угловой скорости dδ/dt руления. Между тем, в случае если абсолютное значение угловой скорости dδ/dt руления составляет вторую заданную угловую скорость dδ2/dt руления или больше, модуль 11Ba вычисления осевой силы прямой связи задает абсолютное значение демпфирующего компонента для коррекции равным предварительно установленному постоянному значению независимо от абсолютной величины угловой скорости dδ/dt руления.
[0024] Как описано выше, модуль 11 вычисления параметров управления в одном варианте осуществления настоящего раскрытия суммирует демпфирующий компонент для коррекции, при котором абсолютное значение становится большим по мере того, как становится больше абсолютное значение угловой скорости dδ/dt руления, с осевой силой TFF прямой связи. Следовательно, в случае если абсолютное значение угловой скорости dδ/dt руления увеличивается, когда руль 1 начинает поворачиваться, модуль 11 вычисления параметров управления в одном варианте осуществления настоящего раскрытия может увеличивать повышение силы реакции при рулении. Таким образом, модуль 11 вычисления параметров управления в одном варианте осуществления настоящего раскрытия может передавать более надлежащее ощущение при рулении.
Кроме того, в случае если абсолютное значение угловой скорости dδ/dt руления составляет вторую заданную угловую скорость dδ2/dt руления или больше, модуль 11 вычисления параметров управления в одном варианте осуществления настоящего раскрытия задает предварительно установленное постоянное значение равным демпфирующему компоненту для коррекции. Следовательно, в случае если абсолютное значение угловой скорости dδ/dt руления составляет вторую заданную угловую скорость dδ2/dt руления или более в силу того факта, что водитель поворачивает руль 1, варьирования демпфирующего компонента для коррекции могут подавляться. Соответственно, модуль 11 вычисления параметров управления в одном варианте осуществления настоящего раскрытия может предотвращать вызывание у водителя ощущения неправильности в отношении ощущения при рулении в силу того факта, что изменение силы реакции при рулении, которое вызывается посредством варьирований демпфирующего компонента для коррекции, не считывается.
[0025] Фиг. 11 является блок-схемой, иллюстрирующей конфигурацию модуля 11Bb вычисления осевой силы обратной связи.
Как показано на фиг. 11, модуль 11Bb вычисления осевой силы обратной связи включает в себя модуль 11Bba вычисления текущей осевой силы, модуль 11Bbb вычисления смешанной осевой силы, модуль 11Bbc обнаружения угловой скорости руления, модуль 11Bbd определения руления и модуль 11Bbe выполнения вычисления осевой силы обратной связи.
На основе тока при повороте, обнаруженного посредством модуля 8B обнаружения тока при повороте, модуль 11Bba вычисления текущей осевой силы вычисляет осевую силу рулевой зубчатой рейки (осевую силу рулевой зубчатой рейки; в дальнейшем в этом документе, называемую "текущей осевой силой") в соответствии со следующей формулой (6). В формуле (6), во-первых, ток при повороте, константа крутящего момента (Нм/А) для вычисления выходного крутящего момента поворотного электромотора 8A на основе тока при повороте и передаточное отношение электромотора для передачи крутящего момента электромотора для поворотного электромотора 8A умножаются между собой. Затем, в формуле (6), результат умножения делится на радиус ведущей шестерни (m) редуктора ведущей шестерни поворотного электромотора 8A, результат деления умножается на эффективность в случае, если передается выходной крутящий момент поворотного электромотора 8A, и результат умножения вычисляется как текущая осевая сила. Затем модуль 11Bba вычисления текущей осевой силы выводит результат вычисления в модуль 11Bbb вычисления смешанной осевой силы и модуль 11Bbe выполнения вычисления осевой силы обратной связи.
Текущая осевая сила=(ток при повороте×передаточное отношение электромотора×константа крутящего момента [Нм/А]/радиус ведущей шестерни [м])×эффективность (6)
[0026] Здесь, ток при повороте варьируется в силу того факта, что поворачивается руль 1, что изменяется целевой угол θ* поворота, и что вызывается разность между целевым углом θ* поворота и фактическим углом θ поворота. Кроме того, ток при повороте также варьируется в силу того факта, что применяются управляемые колеса 2, что поперечная сила Fd на шинах действует на управляемые колеса 2, и что вызывается разность между целевым углом θ* поворота и фактическим углом θ поворота. Кроме того, ток при повороте также варьируется в силу того факта, что искажения поверхности дороги действуют на управляемые колеса 2 вследствие неровностей поверхности дороги и т.п., что поперечная сила Fd на шинах действует на управляемые колеса 2, и что вызывается разность между целевым углом θ* поворота и фактическим углом θ поворота. Следовательно, на основе тока при повороте, модуль 11Bb вычисления осевой силы обратной связи может вычислять осевую силу рулевой зубчатой рейки (текущую осевую силу), отражающую влияние поперечной силы Fd на шинах, действующей на управляемые колеса 2. Здесь, текущая осевая сила формируется в момент времени, когда вызывается разность между целевым углом θ* поворота и фактическим углом θ поворота. Следовательно, как проиллюстрировано на фиг. 12, фаза текущей осевой силы становится опережающей фазу фактической осевой силы рулевой зубчатой рейки или фактической осевой силы поперечного G.
[0027] На основе поперечного ускорения Gy, обнаруженного посредством датчика 6 поперечного G, модуль 11Bbb вычисления смешанной осевой силы вычисляет осевую силу рулевой зубчатой рейки (в дальнейшем в этом документе, также называемую "осевой силой поперечного G") в соответствии со следующей формулой (7). В следующей формуле (7), во-первых, нагрузка на передние колеса и поперечное ускорение Gy умножаются между собой, и результат умножения вычисляется как осевая сила (сила в осевом направлении), прикладываемая к управляемым колесам 2. Затем, в следующей формуле (7), вычисленная осевая сила, прикладываемая к управляемым колесам 2, и константа (в дальнейшем в этом документе, также называемая "коэффициентом тяги"), соответствующая углу тяги и подвеске, умножаются между собой, и результат умножения вычисляется как осевая сила поперечного G.
Осевая сила поперечного G=осевая сила, прикладываемая к управляемым колесам 2×коэффициента тяги (7)
Осевая сила, прикладываемая к управляемым колесам 2=нагрузка на передние колеса×поперечное ускорение Gy
[0028] Здесь, поперечное ускорение Gy формируется в силу того факта, что управляемые колеса 2 поворачиваются, что поперечная сила Fd на шинах действует на управляемые колеса 2, и что транспортное средство A выполняет поворот. Следовательно, на основе поперечного ускорения Gy, модуль 11Bbb вычисления смешанной осевой силы может вычислять осевую силу рулевой зубчатой рейки (осевую силу поперечного G), отражающую влияние поперечной силы Fd на шинах, действующей на управляемые колеса 2. Здесь, поскольку датчик 6 поперечного G располагается в подрессоренном корпусе (кузове транспортного средства), обнаружение поперечного ускорения Gy задерживается. Соответственно, как проиллюстрировано на фиг. 12, фаза осевой силы поперечного G запаздывает относительно фазы фактической осевой силы рулевой зубчатой рейки.
Следует отметить, что, в одном варианте осуществления настоящего раскрытия, проиллюстрирован пример, в котором поперечное ускорение Gy, обнаруженное посредством датчика 6 поперечного G, используется в случае вычисления осевой силы поперечного G; тем не менее, могут приспосабливаться другие конфигурации. Например, может приспосабливаться такая конфигурация, в которой скорость ϒ относительно вертикальной оси, обнаруженная посредством датчика 7 скорости относительно вертикальной оси, умножается на скорость V транспортного средства, обнаруженную посредством датчика 5 скорости транспортного средства, и результат ϒ x V умножения используется вместо поперечного ускорения Gy.
[0029] Кроме того, на основе скорости V транспортного средства, обнаруженной посредством датчика 5 скорости транспортного средства, и на основе скорости ϒ относительно вертикальной оси, обнаруженной посредством датчика 7 скорости относительно вертикальной оси, модуль 11Bbb вычисления смешанной осевой силы вычисляет осевую силу рулевой зубчатой рейки (в дальнейшем в этом документе, также называемую "осевой силой в зависимости от скорости относительно вертикальной оси") в соответствии со следующей формулой (8). В следующей формуле (8), во-первых, нагрузка на передние колеса, скорость V транспортного средства и скорость ϒ относительно вертикальной оси умножаются между собой, и результат умножения вычисляется как осевая сила, прикладываемая к управляемым колесам 2. Затем, в следующей формуле (8), вычисленная осевая сила, прикладываемая к управляемым колесам 2, и коэффициент тяги умножаются между собой, и результат умножения вычисляется как осевая сила в зависимости от скорости относительно вертикальной оси.
Осевая сила в зависимости от скорости относительно вертикальной оси=осевая сила, прикладываемая к управляемым колесам 2×коэффициента тяги (8)
Осевая сила, прикладываемая к управляемым колесам 2=нагрузка на передние колеса×скорость V транспортного средства x скорость ϒ относительно вертикальной оси
Здесь, скорость ϒ относительно вертикальной оси формируется в силу того факта, что управляемые колеса 2 поворачиваются, что поперечная сила Fd на шинах действует на управляемые колеса 2, и что транспортное средство A выполняет поворот. Следовательно, на основе скорости ϒ относительно вертикальной оси, модуль 11Bbb вычисления смешанной осевой силы может вычислять осевую силу рулевой зубчатой рейки (осевую силу в зависимости от скорости относительно вертикальной оси), отражающую влияние поперечной силы Fd на шинах, действующей на управляемые колеса 2. Здесь, поскольку датчик 7 скорости относительно вертикальной оси располагается в подрессоренном корпусе (кузове транспортного средства), обнаружение скорости ϒ относительно вертикальной оси задерживается. Соответственно, как проиллюстрировано фиг. 12, фаза осевой силы в зависимости от скорости относительно вертикальной оси запаздывает относительно фазы фактической осевой силы рулевой зубчатой рейки.
[0030] Кроме того, модуль 11Bbb вычисления смешанной осевой силы считывает текущую осевую силу из модуля 11Bba вычисления текущей осевой силы. Затем, на основе считанной осевой силы тока и на основе вычисленной осевой силы поперечного G и осевой силе в зависимости от скорости относительно вертикальной оси, модуль 11Bbb вычисления смешанной осевой силы вычисляет осевую силу TBR рулевой зубчатой рейки (в дальнейшем в этом документе, также называемую "смешанной осевой силой") в соответствии со следующей формулой (9). В следующей формуле (9) осевая сила поперечного G умножается на коэффициент K1 распределения, текущая осевая сила умножается на коэффициент K2 распределения, осевая сила в зависимости от скорости относительно вертикальной оси умножается на коэффициент K3 распределения, и сумма результатов умножений вычисляется как смешанная осевая сила TBR. Другими словами, смешанная осевая сила TBR вычисляется на основе значения, полученного посредством умножения осевой силы поперечного G на коэффициент K1 распределения, на основе значения, полученного посредством умножения текущей осевой силы на коэффициент K2 распределения, и на основе значения, полученного посредством умножения осевой силы в зависимости от скорости относительно вертикальной оси на коэффициент K3 распределения. Затем модуль 11Bbb вычисления смешанной осевой силы выводит результат вычисления в модуль 11Bbd определения руления и модуль 11Bbe выполнения вычисления осевой силы обратной связи. Здесь, в смешанной осевой силе TBR, осевая сила, которая направляет управляемые колеса 2 в направлении вправо, задается положительной, а осевая сила, которая направляет управляемые колеса 2 в направлении влево, задается отрицательной.
TBR=осевая сила поперечного G×K1+текущая осевая сила×K2+осевая сила в зависимости от скорости относительно вертикальной оси×K3 (9)
[0031] Здесь, коэффициенты K1, K2 и K3 распределения представляют собой коэффициенты распределения осевой силы поперечного G, текущей осевой силы и осевой силы в зависимости от скорости относительно вертикальной оси, соответственно. Соотношение абсолютных величин между коэффициентами K1, K2 и K3 распределения задается как K1>K2>K3. Другими словами, коэффициенты распределения задаются большими в порядке осевой силы поперечного G, текущей осевой силы и осевой силы в зависимости от скорости относительно вертикальной оси. Например, коэффициенты K1, K2 и K3 распределения по отдельности задаются как: K1=0,6; K2=0,3; и K3=0,1. Таким образом, модуль 11Bbb вычисления смешанной осевой силы вычисляет, в качестве смешанной осевой силы TBR, осевую силу рулевой зубчатой рейки, отражающую влияние поперечной силы Fd на шинах, действующей на управляемые колеса 2.
[0032] Фиг. 13 является графиком, иллюстрирующим смешанную осевую силу TBR и фактическую осевую силу рулевой зубчатой рейки.
Как описано выше, модуль 11Bbb вычисления смешанной осевой силы в одном варианте осуществления настоящего раскрытия вычисляет смешанную осевую силу TBR на основе значения, полученного посредством умножения текущей осевой силы на коэффициент K2 распределения, и на основе значения, полученного посредством умножения осевой силы поперечного G на коэффициент K1 распределения. Здесь, как проиллюстрировано на фиг. 12, фаза осевой силы поперечного G запаздывает относительно фазы фактической осевой силы рулевой зубчатой рейки. Кроме того, фаза текущей осевой силы опережает фазу фактической осевой силы рулевой зубчатой рейки. Следовательно, модуль 11Bbb вычисления смешанной осевой силы в одном варианте осуществления настоящего раскрытия суммирует текущую осевую силу с осевой силой поперечного G и за счет этого, как проиллюстрировано на фиг. 13, может компенсировать задержку по фазе вследствие осевой силы поперечного G, и может вычислять более надлежащую смешанную осевую силу TBR. Соответственно, модуль 11 вычисления параметров управления в одном варианте осуществления настоящего раскрытия может прикладывать более надлежащую силу реакции при рулении посредством приведения в действие электромотора 9A для формирования силы реакции на основе смешанной осевой силы TBR.
[0033] Кроме того, модуль 11Bbb вычисления смешанной осевой силы в одном варианте осуществления настоящего раскрытия вычисляет смешанную осевую силу TBR на основе значения, полученного посредством умножения текущей осевой силы на коэффициент K2 распределения, и на основе значения, полученного посредством умножения осевой силы поперечного G на коэффициент K1 распределения. Здесь, в случае если вследствие неровностей поверхности дороги и т.п., искажения поверхности дороги действуют на управляемые колеса 2, и поперечная сила Fd на шинах действует на управляемые колеса 2, в таком случае возникает разность между целевым углом θ* поворота и фактическим углом θ поворота в транспортном средстве A. Следовательно, модуль 11Bbb вычисления смешанной осевой силы в одном варианте осуществления настоящего раскрытия суммирует текущую осевую силу с осевой силой поперечного G и за счет этого может отражать влияние искажений поверхности дороги, которые действуют на управляемые колеса 2, на смешанную осевую силу TBR и может вычислять более надлежащую смешанную осевую силу TBR. Соответственно, модуль 11 вычисления параметров управления в одном варианте осуществления настоящего раскрытия может прикладывать более надлежащую силу реакции при рулении посредством приведения в действие электромотора 9A для формирования силы реакции на основе смешанной осевой силы TBR.
[0034] Кроме того, модуль 11Bbb вычисления смешанной осевой силы в одном варианте осуществления настоящего раскрытия задает коэффициент K1 распределения осевой силы поперечного G таким образом, что он превышает коэффициент K2 распределения текущей осевой силы. Следовательно, модуль 11Bbb вычисления смешанной осевой силы в одном варианте осуществления настоящего раскрытия может уменьшать коэффициент распределения текущей осевой силы и может подавлять уменьшение точности оценки для смешанной осевой силы TBR, например, даже если точность оценки для текущей осевой силы понижается вследствие влияния инерции и трения поворотного электромотора 8A. Соответственно, модуль 11 вычисления параметров управления в одном варианте осуществления настоящего раскрытия может прикладывать более надлежащую силу реакции при рулении посредством приведения в действие электромотора 9A для формирования силы реакции на основе смешанной осевой силы TBR.
[0035] Кроме того, модуль 11Bbb вычисления смешанной осевой силы в одном варианте осуществления настоящего раскрытия вычисляет осевую силу TFB обратной связи на основе значения, полученного посредством умножения текущей осевой силы на коэффициент K2 распределения, на основе значения, полученного посредством умножения осевой силы поперечного G на коэффициент K1 распределения, и на основе значения, полученного посредством умножения осевой силы в зависимости от скорости относительно вертикальной оси на коэффициент K3 распределения. Здесь, например, в случае если транспортное средство A переходит в состояние буксования, ток при повороте и поперечное ускорение Gy увеличиваются, и, соответственно, как результат обнаружения датчика 6 поперечного G, так и результат обнаружения модуля 8B обнаружения тока при повороте достигают максимальных значений (насыщенных значений). Напротив, скорость ϒ относительно вертикальной оси также увеличивается; тем не менее, поскольку величина увеличения скорости ϒ относительно вертикальной оси относительно меньше величин увеличения тока при повороте и поперечного ускорения Gy и, соответственно, результат обнаружения датчика 7 скорости относительно вертикальной оси не достигает максимального значения (насыщенного значения). Соответственно, результат обнаружения датчика 7 скорости относительно вертикальной оси варьируется в зависимости от степени состояния буксования транспортного средства A. Следовательно, смешанная осевая сила TBR может варьироваться в ответ на степень состояния буксования транспортного средства A. Как результат, модуль 11 вычисления параметров управления в одном варианте осуществления настоящего раскрытия может прикладывать более надлежащую силу реакции при рулении посредством приведения в действие электромотора 9A для формирования силы реакции на основе смешанной осевой силы TBR.
[0036] Модуль 11Bbc обнаружения угловой скорости руления вычисляет угловую скорость dδ/dt руления руля 1 на основе угла δ поворота при рулении, обнаруженного посредством датчика 3 угла поворота при рулении. Затем модуль 11Bbc обнаружения угловой скорости руления выводит результат вычисления в модуль 11Bbb вычисления смешанной осевой силы и модуль 11Bbd определения руления. Здесь, в угловой скорости dδ/dt руления, угловая скорость в случае, если руль 1 вращается по часовой стрелке, задается положительной, а угловая скорость в случае, если руль 1 вращается против часовой стрелки, задается отрицательной.
[0037] На основе смешанной осевой силы TBR, вычисленной посредством модуля 11Bbb вычисления смешанной осевой силы, и на основе угловой скорости dδ/dt руления, обнаруженной посредством модуля 11Bbc обнаружения угловой скорости руления, модуль 11Bbd определения руления определяет то, какую из операции увеличивающегося руления и операции возвратного руления выполняет водитель. Например, операция увеличивающегося руления является операцией руления в направлении, в котором руль 1 (угол δ поворота при рулении) уходит из нейтральной позиции. Кроме того, например, операция возвратного руления является операцией руления в направлении, в котором руль 1 (угол δ поворота при рулении) приближается к нейтральной позиции. В частности, в случае если смешанная осевая сила TBR является положительной, и угловая скорость dδ/dt руления является положительной, или в случае, если смешанная осевая сила TBR является отрицательной, и угловая скорость dδ/dt руления является отрицательной, модуль 11Bbd определения руления определяет то, что операция увеличивающегося руления руля 1 выполняется, и задает переменную K4 равной 1,0. Переменная K4 является флагом, указывающим то, что любая из операции увеличивающегося руления и операция возвратного руления руля 1 выполняется. Переменная K4 задается равной 1,0 в случае, если операция увеличивающегося руления руля 1 выполняется, и задается равной 0,0 в случае, если операция возвратного руления руля 1 выполняется. Кроме того, в случае если смешанная осевая сила TBR является положительной, и угловая скорость dδ/dt руления является отрицательной, или в случае, если смешанная осевая сила TBR является отрицательной, и угловая скорость dδ/dt руления является положительной, модуль 11Bbd определения руления определяет то, что операция увеличивающегося руления руля 1 не выполняется, и задает переменную K4 равной 0. Затем модуль 11Bbd определения руления выводит заданную переменную K4 в модуль 11Bbe выполнения вычисления осевой силы обратной связи.
[0038] Модуль 11Bbe выполнения вычисления осевой силы обратной связи считывает текущую осевую силу, смешанную осевую силу TBR, угловую скорость dδ/dt руления и переменную K4 из модуля 11Bba вычисления текущей осевой силы, модуля 11Bbb вычисления смешанной осевой силы, модуля 11Bbc обнаружения угловой скорости руления и модуля 11Bbd определения руления, соответственно. Затем, на основе текущей осевой силы, смешанной осевой силы TBR, угловой скорости dδ/dt руления и переменной K4, которые считываются таким способом, модуль 11Bbe выполнения вычисления осевой силы обратной связи вычисляет осевую силу рулевой зубчатой рейки (в дальнейшем в этом документе, "осевую силу TFB обратной связи") в соответствии со следующей формулой (10). Затем модуль 11Bbe выполнения вычисления осевой силы обратной связи выводит результат вычисления в модуль 11Bc вычисления конечной осевой силы.
Осевая сила TFB обратной связи=текущая осевая сила×GB+смешанная осевая сила TBR×(1-GB) (10)
Следует отметить, что GB является числовым значением, представляющим коэффициент GB распределения текущей осевой силы и коэффициент (1-GB) распределения смешанной осевой силы TBR (в дальнейшем в этом документе, это числовое значение упоминается в качестве коэффициента распределения). Таким образом, на основе коэффициента GB распределения, модуль 11Bbe выполнения вычисления осевой силы обратной связи суммирует текущую осевую силу и смешанную осевую силу TBR друг с другом с коэффициентом GB: (1-GB) и вычисляет осевую силу TFB обратной связи.
[0039] Здесь, в качестве способа для задания коэффициента GB распределения, например, может использоваться способ задания коэффициента GB распределения посредством модуля 11Bbf задания коэффициента распределения на основе такого результата определения, выведенного посредством модуля 11Bbd определения руления. Модуль 11Bbf задания коэффициента распределения считывает угловую скорость dδ/dt руления и переменную K4 из модуля 11Bbd определения руления. Затем, на основе считанной угловой скорости dδ/dt руления и переменной K4, модуль 11Bbf задания коэффициента распределения вычисляет коэффициент GB распределения в соответствии со следующей формулой (11).
GB=K4×K5 (11)
Следует отметить, что K5 является числовым значением, представляющим коэффициент GB распределения текущей осевой силы и коэффициент (1-GB) распределения смешанной осевой силы TBR, когда K4 равна 1,0, т.е. во время операции увеличивающегося руления руля 1. Таким образом, во время операции увеличивающегося руления руля 1, модуль 11Bbe выполнения вычисления осевой силы обратной связи суммирует текущую осевую силу и смешанную осевую силу TBR друг с другом с коэффициентом K5: (1-K5) на основе переменной K5 и вычисляет осевую силу TFB обратной связи. Следует отметить, что, когда K4 равна 0,0, т.е. во время операции возвратного руления руля 1, смешанная осевая сила TBR задается равной как осевая сила TFB обратной связи независимо от переменной K5.
Здесь, в качестве способа для задания переменной K5, например, может использоваться способ считывания переменной K5, которая соответствует угловой скорости dδ/dt руления, из карты M5 управления. В качестве карты M5 управления, например, предусмотрена карта, в которой зарегистрирована переменная K5, соответствующая угловой скорости dδ/dt руления.
[0040] Фиг. 14 является графиком, иллюстрирующим карту M5 управления.
Как проиллюстрировано на фиг. 14, в диапазоне, в котором абсолютное значение угловой скорости dδ/dt руления равно 0 или более и меньше четвертой заданной угловой скорости dδ4/dt руления (>0), карта M5 управления задает переменную K5 равной десятому заданному значению (например, 1,0) независимо от абсолютной величины угловой скорости dδ/dt руления. Кроме того, в диапазоне, в котором абсолютное значение угловой скорости dδ/dt руления составляет пятую заданную угловую скорость dδ5/dt руления (>dδ4/dt) или более, карта M5 управления задает переменную K5 равной одиннадцатому заданному значению (<десятого заданного значения; например, 0,0) независимо от абсолютной величины угловой скорости dδ/dt руления. Кроме того, в диапазоне, в котором абсолютное значение угловой скорости dδ/dt руления составляет четвертую заданную угловую скорость dδ4/dt руления или более и меньше пятой заданной угловой скорости dδ5/dt руления, карта M5 управления линейно уменьшает переменную K5 в ответ на абсолютное значение угловой скорости dδ/dt руления. В частности, в диапазоне, в котором абсолютное значение угловой скорости dδ/dt руления составляет четвертую заданную угловую скорость dδ4/dt руления или более и меньше пятой заданной угловой скорости dδ5/dt руления, карта M5 управления задает переменную K5 в соответствии с линейной функцией, представляющей взаимосвязь между абсолютным значением угловой скорости dδ/dt руления и переменную K5. В линейной функции переменная K5 задается равной десятому заданному значению (1,0) в случае, если абсолютное значение угловой скорости dδ/dt руления составляет четвертую заданную угловую скорость dδ4/dt руления, и переменная K5 задается равной одиннадцатому заданному значению (0,0) в случае, если абсолютное значение угловой скорости dδ/dt руления составляет пятую заданную угловую скорость dδ5/dt руления. Таким образом, модуль 11Bbf задания коэффициента распределения задает коэффициент GB распределения равным 1,0 в случае, если переменная K4 равна 1,0 (время операции увеличивающегося руления), и абсолютное значение угловой скорости dδ/dt руления меньше четвертой заданной угловой скорости dδ4/dt руления (время руления на низкой скорости). Затем модуль 11Bbe выполнения вычисления осевой силы обратной связи задает текущую осевую силу равной осевой силе TFB обратной связи. Кроме того, модуль 11Bbf задания коэффициента распределения задает коэффициент GB распределения равным 0,0 в случае, если переменная K4 равна 1,0 (время операции увеличивающегося руления), и абсолютное значение угловой скорости dδ/dt руления составляет пятую заданную угловую скорость dδ5/dt руления или более (время руления на высокой скорости). Таким образом, модуль 11Bbe выполнения вычисления осевой силы обратной связи задает смешанную осевую силу TBR равной осевой силе TFB обратной связи. Кроме того, модуль 11Bbf задания коэффициента распределения задает переменную K5 равной н коэффициенту GB распределения в случае, если переменная K4 равна 1,0 (время операции увеличивающегося руления), и абсолютное значение угловой скорости dδ/dt руления составляет четвертую заданную угловую скорость dδ4/dt руления или более и меньше пятой заданной угловой скорости dδ5/dt руления (время руления на средней скорости). Таким образом, модуль 11Bbe выполнения вычисления осевой силы обратной связи задает, в качестве осевой силы TFB обратной связи, сумму значения, полученного посредством умножения текущей осевой силы на переменную K5, и значения, полученного посредством умножения смешанной осевой силы TBR на (1-K5). Между тем, в случае если переменная K4 равна 0,0 (время операции возвратного руления), модуль 11Bbf задания коэффициента распределения задает 0,0 для коэффициента GB распределения независимо от угловой скорости dδ/dt руления. Затем модуль 11Bbe выполнения вычисления осевой силы обратной связи задает смешанную осевую силу TBR равной осевой силе TFB обратной связи.
[0041] Как описано выше, когда операция увеличивающегося руления руля 1 выполняется, модуль 11Bbe выполнения вычисления осевой силы обратной связи в одном варианте осуществления настоящего раскрытия задает текущую осевую силу равной осевой силе TFB обратной связи в случае, если абсолютное значение угловой скорости dδ/dt руления меньше четвертой заданной угловой скорости dδ4/dt руления. Здесь, в механическом устройстве управления рулением, в котором руль 1 и управляемые колеса 2 механически зацепляются друг с другом, сила реакции при рулении для того, чтобы возвращать руль 1 в нейтральную позицию формируется посредством поперечной силы Fd на шинах и трения, которые соответствуют повороту управляемых колес 2 во время операции увеличивающегося руления руля 1. Кроме того, в модуле 11Bbe выполнения вычисления осевой силы обратной связи в одном варианте осуществления настоящего раскрытия, текущая осевая сила становится равной сумме поперечной силы Fd на шинах и трения во время операции увеличивающегося руления руля 1. Следовательно, посредством задания текущей осевой силы равной осевой силе TFB обратной связи, модуль 11 вычисления параметров управления в одном варианте осуществления настоящего раскрытия может прикладывать силу реакции при рулении для того, чтобы возвращать руль 1 в нейтральную позицию, аналогично механическому устройству управления рулением. Таким образом, во время операции увеличивающегося руления руля 1, модуль 11 вычисления параметров управления в одном варианте осуществления настоящего раскрытия может прикладывать более надлежащую силу реакции при рулении.
[0042] В этой связи, в смешанной осевой силе TBR, элемент трения, сопровождающего поворот управляемых колес 2, не содержится. Следовательно, например, во время операции увеличивающегося руления руля 1, имеется вероятность того, что ощущение неправильности может вызываться в отношении ощущения при рулении в соответствии с таким способом задания смешанной осевой силы TBR равной осевую силе TFB обратной связи.
Кроме того, когда операция возвратного руления руля 1 выполняется, модуль 11Bbe выполнения вычисления осевой силы обратной связи в одном варианте осуществления настоящего раскрытия задает смешанную осевую силу TBR, в которой текущая осевая сила и осевая сила поперечного G распределяются с предварительно установленным коэффициентом распределения, равной осевой силе TFB обратной связи независимо от абсолютной величины абсолютного значения угловой скорости dδ/dt руления. Здесь, в механическом устройстве управления рулением, в котором руль 1 и управляемые колеса 2 механически зацепляются между собой, сила реакции при рулении для того, чтобы возвращать руль 1 в нейтральную позицию, формируется посредством поперечной силы Fd на шинах, которая соответствует повороту управляемых колес 2 во время операции возвратного руления руля 1. Следовательно, в механическом устройстве управления рулением во время операции возвратного руления руля 1, водитель уменьшает удерживающую силу для руля 1, заставляет плавно проскальзывать руль 1 по ладони, за счет этого возвращает руль 1 в нейтральную позицию и возвращает управляемые колеса 2 в нейтральную позицию. Напротив, в модуле 11Bbe выполнения вычисления осевой силы обратной связи в одном варианте осуществления настоящего раскрытия, смешанная осевая сила TBR задается равной осевой силе TFB обратной связи, в силу чего может подавляться снижение силы реакции при рулении для того, чтобы возвращать руль 1 в нейтральную позицию, даже если ток при повороте снижается, и текущая осевая сила снижается. Следовательно, модуль 11Bbe выполнения вычисления осевой силы обратной связи в одном варианте осуществления настоящего раскрытия может возвращать руль 1 в нейтральную позицию таким образом, что водитель уменьшает удерживающую силу для руля 1 и заставляет плавно проскальзывать руль 1 по ладони, аналогично механическому устройству управления рулением. Таким образом, во время операции возвратного руления руля 1, модуль 11 вычисления параметров управления в одном варианте осуществления настоящего раскрытия может прикладывать более надлежащую силу реакции при рулении.
[0043] Кроме того, в случае определения того, что операция увеличивающегося руления руля 1 выполняется, и определения того, что абсолютное значение угловой скорости dδ/dt руления составляет четвертую заданную угловую скорость dδ4/dt руления или больше, модуль 11Bbe выполнения вычисления осевой силы обратной связи в одном варианте осуществления настоящего раскрытия распределяет текущую осевую силу и смешанную осевую силу TBR, чтобы задавать осевую силу TFB обратной связи, и помимо этого, увеличивает коэффициент распределения текущей осевой силы по мере того, как становится меньшим абсолютное значение угловой скорости dδ/dt руления. Следовательно, например, в случае если угол δ поворота при рулении выходит за пределы нейтральной позиции во время операции возвратного руления руля 1, и затем операция увеличивающегося руления руля 1 выполняется в направлении, идентичном направлению операции возвратного руления, в таком случае модуль 11Bbe выполнения вычисления осевой силы обратной связи в одном варианте осуществления настоящего раскрытия может постепенно переключать осевую силу TFB обратной связи со смешанной осевой силы TBR на текущую осевую силу по мере того, как абсолютное значение угловой скорости dδ/dt руления постепенно уменьшается во время операции увеличивающегося руления. Таким образом, модуль 11 вычисления параметров управления в одном варианте осуществления настоящего раскрытия может прикладывать более надлежащую силу реакции при рулении.
[0044] Возвращаясь к фиг. 3, модуль 11Bc вычисления конечной осевой силы считывает угол δ поворота при рулении, скорость V транспортного средства, поперечное ускорение Gy, осевую силу TFF прямой связи и осевую силу TFB обратной связи из датчика 3 угла поворота при рулении, датчика 5 скорости транспортного средства, датчика 6 поперечного G, модуля 11Ba вычисления осевой силы прямой связи и модуля 11Bb вычисления осевой силы обратной связи, соответственно. Затем, модуль 11Bc вычисления конечной осевой силы вычисляет угловую скорость dδ/dt руления руля 1 на основе считанного угла δ поворота при рулении. Затем, модуль 11Bc вычисления конечной осевой силы вычисляет осевую силу рулевой зубчатой рейки (конечную осевую силу) в соответствии со следующей формулой (12) на основе угла δ поворота при рулении, скорости V транспортного средства, поперечного ускорения Gy, осевой силы TFF прямой связи и осевой силы TFB обратной связи, которые считываются таким способом, и на основе вычисленной угловой скорости dδ/dt руления. Затем модуль 11Bc вычисления конечной осевой силы выводит результат вычисления в модуль 11Bd преобразования силы реакции при рулении и осевой силы.
Конечная осевая сила=осевая сила TFF прямой связи×GF+осевая сила TFB обратной связи×(1-GF) (12)
Здесь, GF является числовым значением, представляющим коэффициент GF распределения осевой силы TFF прямой связи и коэффициент (1-GF) распределения осевой силы TFB обратной связи (в дальнейшем в этом документе, это числовое значение упоминается в качестве коэффициента распределения). Таким образом, на основе коэффициента GF распределения, модуль 11Bc вычисления конечной осевой силы суммирует осевую силу TFF прямой связи и осевую силу TFB обратной связи друг с другом с коэффициентом GF: (1-GF) и вычисляет конечную осевую силу.
[0045] Таким образом, модуль 11Bc вычисления конечной осевой силы в одном варианте осуществления настоящего раскрытия вычисляет конечную осевую силу на основе осевой силы TFB обратной связи и осевой силы TFF прямой связи. Здесь, осевая сила TFB обратной связи отражает влияние поперечной силы Fd на шинах, действующей на управляемые колеса 2, и, соответственно, изменяется в ответ на изменение состояния поверхности дороги и изменение состояния транспортного средства. Напротив, осевая сила TFF прямой связи не отражает влияние поперечной силы Fd на шинах и, соответственно, изменяется плавно независимо от изменения состояния поверхности дороги и т.п. Следовательно, модуль 11Bc вычисления конечной осевой силы вычисляет конечную осевую силу на основе осевой силы TFF прямой связи в дополнение к осевой силе TFB обратной связи и за счет этого может вычислять более надлежащую конечную осевую силу.
[0046] Модуль 11Bc вычисления конечной осевой силы включает в себя модуль 11Bca вычисления коэффициентов распределения. Модуль 11Bca вычисления коэффициентов распределения задает коэффициент GF распределения на основе коэффициента GF1 распределения, который основан на разности осевых сил, на основе коэффициента GF2 распределения, который основан на поперечном ускорении Gy, на основе коэффициента GF3 распределения, который основан на скорости V транспортного средства и углу δ поворота при рулении, и на основе коэффициента GF4 распределения, который основан на угловой скорости dδ/dt руления. В качестве разности осевых сил, например, может использоваться разность между осевой силой TFF прямой связи и осевой силой TFB обратной связи. В частности, разность осевых сил задается как результат вычитания, полученный посредством вычитания осевой силы TFB обратной связи из осевой силы TFF прямой связи. Кроме того, в качестве способа для задания коэффициента GF распределения, например, может использоваться способ умножения меньшего значения между коэффициентом GF1 распределения, который основан на разности осевых сил, и коэффициента GF2 распределения, который основан на поперечном ускорении Gy, коэффициента GF3 распределения, который основан на скорости V транспортного средства и углу δ поворота при рулении, и коэффициента GF4 распределения, который основан на угловой скорости dδ/dt руления, между собой и задания результата умножения как коэффициента GF распределения.
[0047] Фиг. 15 является графиком, иллюстрирующим карту M6 управления.
Кроме того, в качестве способа для задания коэффициента GF1 распределения, например, может использоваться способ считывания коэффициента GF1 распределения, который соответствует абсолютному значению разности осевых сил, из карты M6 управления. В качестве карты M6 управления, например, предусмотрена карта, в которой зарегистрирован коэффициент GF1 распределения, соответствующий абсолютному значению разности осевых сил. В частности, как проиллюстрировано на фиг. 15, в диапазоне, в котором абсолютное значение разности осевых сил равно 0 или более и меньше первой заданной разности Z1 осевых сил (>0), карта M6 управления задает коэффициент GF1 распределения равным двенадцатому заданному значению (например, 1,0) независимо от абсолютной величины разности осевых сил. В качестве первой заданной разности Z1 осевых сил, например, может использоваться разность осевых сил, в которой точность оценки для осевой силы TFF прямой связи начинает снижаться. Кроме того, в диапазоне, в котором абсолютное значение разности осевых сил составляет вторую заданную разность Z2 осевых сил (>Z1) или более, карта M6 управления задает коэффициент GF1 распределения равным тринадцатому заданному значению (<двенадцатого заданного значения; например, 0,0) независимо от абсолютной величины разности осевых сил. В качестве второй заданной разности Z2 осевых сил, например, может использоваться разность осевых сил, в которой точность оценки для осевой силы TFF прямой связи становится ниже точности оценки для осевой силы TFB обратной связи. Кроме того, в диапазоне, в котором абсолютное значение разности осевых сил составляет первую заданную разность Z1 осевых сил или более и меньше второй заданной разности Z2 осевых сил, карта M6 управления линейно уменьшает коэффициент GF1 распределения в ответ на абсолютное значение разности осевых сил. В частности, в диапазоне, в котором абсолютное значение разности осевых сил составляет первую заданную разность Z1 осевых сил или более и меньше второй заданной разности Z2 осевых сил, карта M6 управления задает коэффициент GF1 распределения в соответствии с линейной функцией, представляющей взаимосвязь между абсолютным значением разности осевых сил и коэффициентом GF1 распределения. В линейной функции коэффициент GF1 распределения задается равным двенадцатому заданному значению (1,0) в случае, если абсолютное значение разности осевых сил составляет первую заданную разность Z1 осевых сил, и коэффициент GF1 распределения задается равным тринадцатому заданному значению (0,0) в случае, если абсолютное значение разности осевых сил составляет вторую заданную разность Z2 осевых сил.
[0048] Как описано выше, в случае если абсолютное значение разности осевых сил составляет первую заданную разность Z1 осевых сил или больше, модуль 11Bc вычисления конечной осевой силы в одном варианте осуществления настоящего раскрытия понижает коэффициент GF1 распределения (коэффициент GF распределения осевой силы TFF прямой связи) больше, чем в случае, если абсолютное значение разности осевых сил меньше первой заданной разности Z1 осевых сил. Следовательно, например, в случае если μ поверхности дороги понижается, точность оценки для осевой силы TFF прямой связи снижается, и разность осевых сил увеличивается, в таком случае модуль 11Bc вычисления конечной осевой силы в одном варианте осуществления настоящего раскрытия может увеличивать коэффициент (1-GF) распределения осевой силы TFB обратной связи. Следовательно, модуль 11Bc вычисления конечной осевой силы в одном варианте осуществления настоящего раскрытия может прикладывать более надлежащую силу реакции при рулении.
[0049] Фиг. 16 является графиком, иллюстрирующим карту M7 управления.
Здесь, в качестве способа для задания коэффициента GF2 распределения, например, может использоваться способ считывания коэффициента GF2 распределения, который соответствует абсолютному значению поперечного ускорения Gy, из карты M7 управления. В качестве карты M7 управления, например, предусмотрена карта, в которой зарегистрирован коэффициент GF2 распределения, соответствующий абсолютному значению поперечного ускорения Gy. В частности, как проиллюстрировано на фиг. 16, в диапазоне, в котором абсолютное значение поперечного ускорения Gy равно 0 или более и меньше первого заданного поперечного ускорения Gy1 (>0), карта M7 управления задает коэффициент GF2 распределения равным четырнадцатому заданному значению (например, 1,0) независимо от абсолютной величины поперечного ускорения Gy. В качестве первого заданного поперечного ускорения Gy1, например, может использоваться поперечное ускорение Gy, в котором точность оценки для осевой силы TFF прямой связи начинает снижаться. Кроме того, в диапазоне, в котором абсолютное значение поперечного ускорения Gy составляет второе заданное поперечное ускорение Gy2 (>Gy1) или более, карта M7 управления задает коэффициент GF2 распределения равным пятнадцатому заданному значению (<четырнадцатого заданного значения; например, 0,0) независимо от абсолютной величины поперечного ускорения Gy. В качестве второго заданного поперечного ускорения Gy2, например, может использоваться поперечное ускорение Gy, в котором точность оценки для осевой силы TFF прямой связи становится ниже точности оценки для осевой силы TFB обратной связи. Кроме того, в диапазоне, в котором абсолютное значение поперечного ускорения Gy составляет первое заданное поперечное ускорение Gy1 или более и меньше второго заданного поперечного ускорения Gy2, карта M7 управления линейно уменьшает коэффициент GF2 распределения в ответ на абсолютное значение поперечного ускорения Gy. В частности, в диапазоне, в котором абсолютное значение поперечного ускорения Gy составляет первое заданное поперечное ускорение Gy1 или более и меньше второго заданного поперечного ускорения Gy2, карта M7 управления задает коэффициент GF2 распределения в соответствии с линейной функцией, представляющей взаимосвязь между абсолютным значением поперечного ускорения Gy и коэффициентом GF2 распределения. В линейной функции коэффициент GF3 распределения задается равным четырнадцатому заданному значению (1,0) в случае, если абсолютное значение поперечного ускорения Gy составляет первое заданное поперечное ускорение Gy1, и коэффициент GF3 распределения задается равным пятнадцатому заданному значению (0,0) в случае, если абсолютное значение поперечного ускорения Gy составляет второе заданное поперечное ускорение Gy2.
[0050] Как описано выше, в случае если абсолютное значение поперечного ускорения Gy составляет первое заданное поперечное ускорение Gy1 или больше, модуль 11Bc вычисления конечной осевой силы в одном варианте осуществления настоящего раскрытия понижает коэффициент GF2 распределения (коэффициент GF распределения осевой силы TFF прямой связи) больше, чем в случае, если абсолютное значение поперечного ускорения Gy меньше первого заданного поперечного ускорения Gy1. Следовательно, например, в случае если поперечное ускорение Gy увеличивается, и точность оценки для осевой силы TFF прямой связи снижается, в таком случае модуль 11Bc вычисления конечной осевой силы в одном варианте осуществления настоящего раскрытия может увеличивать коэффициент (1-GF) распределения осевой силы TFB обратной связи. Соответственно, модуль 11Bc вычисления конечной осевой силы в одном варианте осуществления настоящего раскрытия может прикладывать более надлежащую силу реакции при рулении.
[0051] Фиг. 17A и 17B являются графиками, иллюстрирующими карты M8a и M8b управления.
Здесь, в качестве способа для задания коэффициента GF3 распределения, например, может использоваться способ считывания коэффициентов GF3a и GF3b распределения, которые соответствуют абсолютному значению скорости V транспортного средства и абсолютному значению угла δ поворота при рулении, из карт M8a и M8b управления, умножения считанных коэффициентов GF3a и GF3b распределения между собой и задания результата умножения как коэффициента GF3 распределения. В качестве карты управления M8a, например, предусмотрена карта, в которой зарегистрирован коэффициент GF3 распределения, соответствующий абсолютному значению скорости V транспортного средства. В частности, как проиллюстрировано на фиг. 17A, в диапазоне, в котором абсолютное значение скорости V транспортного средства равно 0 или более и меньше третьей заданной скорости V3 транспортного средства, карта M8a управления задает коэффициент GF3a распределения равным шестнадцатому заданному значению (например, 0,5) независимо от абсолютной величины скорости V транспортного средства. В качестве третьей заданной скорости V3 транспортного средства, например, может использоваться скорость V транспортного средства, в которой появляется нелинейность (нелинейность поперечной силы Fd на шинах относительно угла скольжения шин) характеристик шины вследствие низкой скорости V транспортного средства, и точность оценки для осевой силы TFF прямой связи начинает снижаться. Кроме того, в диапазоне, в котором абсолютное значение скорости V транспортного средства составляет четвертую заданную скорость V4 транспортного средства (>V3) или более, карта M8a управления задает коэффициент GF3a распределения равным семнадцатому заданному значению (>шестнадцатого заданного значения; например, 1,0) независимо от абсолютной величины скорости V транспортного средства. В качестве четвертой заданной скорости V4 транспортного средства, например, может использоваться скорость V транспортного средства, в которой точность оценки для осевой силы TFF прямой связи повышается больше относительно точности оценки для осевой силы TFB обратной связи. Кроме того, в диапазоне, в котором абсолютное значение скорости V транспортного средства составляет третью заданную скорость V3 транспортного средства или более и меньше четвертой заданной скорости V4 транспортного средства, карта M8a управления линейно увеличивает коэффициент GF3a распределения в ответ на абсолютное значение скорости V транспортного средства. В частности, в диапазоне, в котором абсолютное значение скорости V транспортного средства составляет третью заданную скорость V3 транспортного средства или более и меньше четвертой заданной скорости V4 транспортного средства, карта M8a управления задает коэффициент GF3a распределения в соответствии с линейной функцией, представляющей взаимосвязь между скоростью V транспортного средства и коэффициентом GF3a распределения. В линейной функции коэффициент GF3a распределения задается равным шестнадцатому заданному значению (0,5) в случае, если абсолютное значение скорости V транспортного средства составляет третью заданную скорость V3 транспортного средства, и коэффициент GF3a распределения задается равным семнадцатому заданному значению (1,0) в случае, если скорость V транспортного средства составляет четвертую заданную скорость V4 транспортного средства.
[0052] Как описано выше, в случае если абсолютное значение скорости V транспортного средства меньше четвертой заданной скорости V4 транспортного средства, модуль 11Bc вычисления конечной осевой силы в одном варианте осуществления настоящего раскрытия понижает коэффициент GF3a распределения (коэффициент GF распределения осевой силы TFF прямой связи) больше, чем в случае, если абсолютное значение скорости V транспортного средства составляет четвертую заданную скорость V4 транспортного средства или больше. Следовательно, например, в случае если скорость V транспортного средства снижается, и точность оценки для осевой силы TFF прямой связи снижается, в таком случае модуль 11Bc вычисления конечной осевой силы в одном варианте осуществления настоящего раскрытия может увеличивать коэффициент (1-GF) распределения осевой силы TFB обратной связи. Следовательно, модуль 11Bc вычисления конечной осевой силы в одном варианте осуществления настоящего раскрытия может прикладывать более надлежащую силу реакции при рулении.
[0053] Кроме того, в качестве карты M8b управления, например, предусмотрена карта, в которой зарегистрирован коэффициент GF3b распределения, соответствующий абсолютному значению угла δ поворота при рулении. В частности, как проиллюстрировано на фиг. 17B, в диапазоне, в котором абсолютное значение угла δ поворота при рулении равно 0 или более и меньше первого заданного угла δδ1 поворота при рулении (>0), карта M8b управления задает коэффициент GF3b распределения равным восемнадцатому заданному значению (например, 1,0) независимо от абсолютной величины угла δ поворота при рулении. В качестве первого заданного угла δ1 поворота при рулении, например, может использоваться угол δ поворота при рулении, при котором точность оценки для осевой силы TFF прямой связи начинает снижаться. Кроме того, в диапазоне, в котором абсолютное значение угла δ поворота при рулении составляет второй заданный угол δ2 поворота при рулении (>δ1) или более, карта M8b управления задает коэффициент GF3b распределения равным девятнадцатому заданному значению (<восемнадцатого заданного значения; например, 0,6) независимо от абсолютной величины угла δ поворота при рулении. В качестве второго заданного угла δ2 поворота при рулении, например, может использоваться угол δ поворота при рулении, при котором точность оценки для осевой силы TFF прямой связи становится ниже точности оценки для осевой силы TFB обратной связи. Кроме того, в диапазоне, в котором абсолютное значение угла δ поворота при рулении составляет заданный угол δ1 поворота при рулении или более и меньше второго заданного угла δ2 поворота при рулении, карта M8b управления линейно уменьшает коэффициент GF3b распределения в ответ на абсолютное значение угла δ поворота при рулении. В частности, в диапазоне, в котором абсолютное значение угла δ поворота при рулении составляет заданный угол δ1 поворота при рулении или более и меньше второго заданного угла δ2 поворота при рулении, карта M8b управления задает коэффициент GF3b распределения в соответствии с линейной функцией, представляющей взаимосвязь между абсолютным значением угла δ поворота при рулении и коэффициентом GF3b распределения. В линейной функции коэффициент GF3b распределения задается равным восемнадцатому заданному значению (1,0) в случае, если абсолютное значение угла δ поворота при рулении составляет заданный угол δ1 поворота при рулении, и коэффициент GF3 распределения задается равным девятнадцатому заданному значению (0,6) в случае, если абсолютное значение угла δ поворота при рулении составляет второй заданный угол δ2 поворота при рулении.
[0054] Как описано выше, в случае если абсолютное значение угла δ поворота при рулении составляет заданный угол δ1 поворота при рулении или больше, модуль 11Bc вычисления конечной осевой силы в одном варианте осуществления настоящего раскрытия понижает коэффициент GF3b распределения (коэффициент GF распределения осевой силы TFF прямой связи) больше, чем в случае, если абсолютное значение угла δ поворота при рулении меньше первого заданного угла δ1 поворота при рулении. Следовательно, например, в случае если угол δ поворота при рулении увеличивается, и точность оценки для осевой силы TFF прямой связи снижается, в таком случае модуль 11Bc вычисления конечной осевой силы в одном варианте осуществления настоящего раскрытия может увеличивать коэффициент (1-GF) распределения осевой силы TFB обратной связи. Следовательно, модуль 11Bc вычисления конечной осевой силы в одном варианте осуществления настоящего раскрытия может прикладывать более надлежащую силу реакции при рулении.
[0055] Фиг. 18 является графиком, иллюстрирующим карту M9 управления.
Здесь, в качестве способа для задания коэффициента GF4 распределения, например, может использоваться способ считывания коэффициента GF4 распределения, который соответствует абсолютному значению угловой скорости dδ/dt руления, из карты M9 управления. В качестве карты M9 управления, например, предусмотрена карта, в которой зарегистрирован коэффициент GF4 распределения, соответствующий абсолютному значению угловой скорости dδ/dt руления. В частности, как проиллюстрировано на фиг. 18, в диапазоне, в котором абсолютное значение угловой скорости dδ/dt руления равно 0 или более и меньше четвертой заданной угловой скорости dδ4/dt руления (>0), карта M9 управления задает коэффициент GF4 распределения равным двадцатому заданному значению (например, 1,0) независимо от абсолютной величины угловой скорости dδ/dt руления. В качестве четвертой заданной угловой скорости dδ4/dt руления, например, может использоваться угловая скорость dδ/dt руления, при которой точность оценки для осевой силы TFF прямой связи начинает снижаться. Кроме того, в диапазоне, в котором абсолютное значение угловой скорости dδ/dt руления составляет пятую заданную угловую скорость d5/dt руления (>dδ4/dt) или более, карта M9 управления задает коэффициент GF4 распределения равным двадцать первому заданному значению (<двадцатого заданного значения; например, 0,0) независимо от абсолютной величины угловой скорости dδ/dt руления. В качестве пятой заданной угловой скорости dδ5/dt руления, например, может использоваться угловая скорость dδ/dt руления, при которой точность оценки для осевой силы TFF прямой связи становится ниже точности оценки для осевой силы TFB обратной связи. Кроме того, в диапазоне, в котором абсолютное значение угловой скорости dδ/dt руления составляет четвертую заданную угловую скорость dδ4/dt руления или более и меньше пятой заданной угловой скорости dδ5/dt руления, карта M9 управления линейно уменьшает коэффициент GF4 распределения в ответ на абсолютное значение угловой скорости dδ/dt руления. В частности, в диапазоне, в котором абсолютное значение угловой скорости dδ/dt руления составляет четвертую заданную угловую скорость dδ4/dt руления или более и меньше пятой заданной угловой скорости d5/dt руления, карта M9 управления задает коэффициент GF4 распределения в соответствии с линейной функцией, представляющей взаимосвязь между абсолютным значением угловой скорости dδ/dt руления и коэффициент GF4 распределения. В линейной функции коэффициент GF4 распределения задается равным двадцатому заданному значению (1,0) в случае, если абсолютное значение угловой скорости dδ/dt руления составляет четвертую заданную угловую скорость dδ4/dt руления, и коэффициент GF4 распределения задается равным двадцать первому заданному значению (0,0) в случае, если абсолютное значение угловой скорости dδ/dt руления составляет пятую заданную угловую скорость dδ5/dt руления.
[0056] Как описано выше, в случае если абсолютное значение угловой скорости dδ/dt руления составляет четвертую заданную угловую скорость dδ4/dt руления или больше, модуль 11Bc вычисления конечной осевой силы в одном варианте осуществления настоящего раскрытия понижает коэффициент GF4 распределения (коэффициент GF распределения осевой силы TFF прямой связи) больше, чем в случае, если абсолютное значение угловой скорости dδ=δ/dt руления меньше четвертой заданной угловой скорости dδ==δ4/dt руления. Следовательно, например, в случае если угловая скорость dδ=δ/dt руления увеличивается, и точность оценки для осевой силы TFF прямой связи снижается, в таком случае модуль 11Bc вычисления конечной осевой силы в одном варианте осуществления настоящего раскрытия может увеличивать коэффициент (1-GF) распределения осевой силы TFB обратной связи. Следовательно, модуль 11Bc вычисления конечной осевой силы в одном варианте осуществления настоящего раскрытия может прикладывать более надлежащую силу реакции при рулении.
[0057] Таким образом, модуль 11Bc вычисления конечной осевой силы задает осевую силу TFF прямой связи равной конечной осевой силе в случае, если абсолютное значение разности осевых сил меньше первой заданной разности Z1 осевых сил, абсолютное значение поперечного ускорения Gy меньше первого заданного поперечного ускорения Gy1, абсолютное значение скорости V транспортного средства составляет четвертую заданную скорость V4 транспортного средства или больше, абсолютное значение угла δ поворота при рулении меньше первого заданного угла δ1 поворота при рулении, и абсолютное значение угловой скорости dδ/dt руления меньше четвертой заданной угловой скорости dδ4/dt руления. Кроме того, модуль 11Bc вычисления конечной осевой силы задает осевую силу TFB обратной связи равной конечной осевой силе, по меньшей мере, в одном из случаев, в которых абсолютное значение разности осевых сил составляет вторую заданную разность Z2 осевых сил или больше, абсолютное значение поперечного ускорения Gy составляет второе заданное поперечное ускорение Gy2 или больше и абсолютное значение угловой скорости dδ/dt руления составляет пятую заданную угловую скорость dδ5/dt руления или больше. Кроме того, модуль 11Bc вычисления конечной осевой силы задает, равной конечной осевой силе, сумму, которая состоит из значения, полученного посредством умножения осевой силы TFF прямой связи на коэффициент GF распределения, и значения, полученного посредством умножения осевой силы TFB обратной связи на коэффициент (1-GF) распределения, в случае если абсолютное значение разности осевых сил составляет первую заданную разность Z1 осевых сил или более и меньше второй заданной разности Z2 осевых сил, абсолютное значение поперечного ускорения Gy составляет первое заданное поперечное ускорение Gy1 или более и меньше второго заданного поперечного ускорения Gy2, абсолютное значение скорости V транспортного средства меньше четвертой заданной скорости V4 транспортного средства, абсолютное значение угла δ поворота при рулении составляет заданный угол δ1 поворота при рулении или более, и абсолютное значение угловой скорости dδ/dt руления составляет четвертую заданную угловую скорость dδ4/dt руления или больше.
[0058] Следовательно, модуль 11Bc вычисления конечной осевой силы задает осевую силу TFF прямой связи равной конечной осевой силе в такой ситуации, когда транспортное средство A находится в состоянии, в котором μ поверхности дороги для дороги является высоким (сухая поверхность дороги), скорость V транспортного средства является высокой, угол δ поворота при рулении является небольшим, и угловая скорость dδ/dt руления является небольшой (в дальнейшем в этом документе, эта ситуация также упоминается как особая ситуация). Здесь, осевая сила TFF прямой связи не отражает влияние поперечной силы Fd на шинах и, соответственно, изменяется плавно независимо от изменения состояния поверхности дороги и т.п. Следовательно, модуль 11Bc вычисления конечной осевой силы может реализовывать устойчивое ощущение при рулении в таком случае, в котором транспортное средство A находится в особой ситуации. Напротив, в случае если транспортное средство A находится в ситуации, отличной от особой ситуации (в дальнейшем в этом документе, эта другая ситуация также упоминается как обычная ситуация), модуль 11Bc вычисления конечной осевой силы задает, равной конечной осевой силе, осевую силу TFB обратной связи или сумму осевой силы TFF прямой связи и осевой силы TFB обратной связи. Здесь, осевая сила TFB обратной связи отражает влияние поперечной силы Fd на шинах, действующей на управляемые колеса 2, и, соответственно, изменяется в ответ на изменение состояния поверхности дороги и изменение состояния транспортного средства. Следовательно, в случае если транспортное средство A находится в обычной ситуации, модуль 11Bc вычисления конечной осевой силы может передавать ощущение при рулении, аналогичное ощущению при рулении механического устройства управления рулением, в котором руль 1 и управляемые колеса 2 механически зацепляются между собой, и может реализовывать естественное ощущение при рулении.
[0059] Возвращаясь к фиг. 3, модуль 11Bd преобразования силы реакции при рулении и осевой силы вычисляет целевую силу реакции при рулении на основе конечной осевой силы, вычисленной посредством модуля 11Bc вычисления конечной осевой силы. Целевая сила реакции при рулении является целевым значением силы реакции при рулении. В качестве способа для вычисления целевой силы реакции при рулении, может использоваться способ считывания целевой силы реакции при рулении, которая соответствует скорости V транспортного средства и конечной осевой силе, из карты M10 управления. Карта M10 управления представляет собой карту, в которой целевая сила реакции при рулении, соответствующая конечной осевой силе, зарегистрирована для каждой скорости V транспортного средства.
[0060] Фиг. 19 является графиком, иллюстрирующим карту M10 управления.
Как проиллюстрировано на фиг. 19, карта M10 управления задается для каждой скорости V транспортного средства. Кроме того, карта M10 управления задает целевую силу реакции при рулении равной большему значению по мере того, как становится больше конечная осевая сила.
Возвращаясь к фиг. 3, модуль 11Be вычисления целевого тока силы реакции вычисляет целевой ток силы реакции в соответствии со следующей формулой (13) на основе целевой силы реакции при рулении, вычисленной посредством модуля 11Bd преобразования силы реакции при рулении, и осевой силы. Затем модуль 11Be вычисления целевого тока силы реакции выводит результат вычисления в модуль 9C приведения в действие электромотора для формирования силы реакции.
Целевой ток силы реакции = целевая сила реакции при рулении x усиление (13)
[0061] Следует отметить, что, в одном варианте осуществления настоящего раскрытия, проиллюстрирован пример, в котором модуль 11Be вычисления целевого тока силы реакции вычисляет целевой ток силы реакции на основе целевой силы реакции при рулении, вычисленной посредством модуля 11Bd преобразования силы реакции при рулении, и осевой силы; тем не менее, также могут приспосабливаться другие конфигурации. Например, может использоваться такая конфигурация, в которой модуль 11Be вычисления целевого тока силы реакции суммирует компенсационную силу реакции, силу реакции при полном упоре и т.п. с целевой силой реакции при рулении, вычисленной посредством модуля 11Bd преобразования силы реакции при рулении, и осевой силой, за счет этого корректирует целевую силу реакции при рулении и вычисляет целевой ток силы реакции на основе скорректированной целевой силы реакции при рулении. В качестве компенсационной силы реакции, например, предусмотрена сила реакции при рулении, прикладываемая в случае коррекции целевой силы реакции при рулении. Кроме того, в качестве силы реакции при полном упоре, например, предусмотрена сила реакции при рулении, прикладываемая в случае, если угол θ поворота становится максимальным значением.
[0062] РАБОТА И Т.П.
Далее приводится описание операций устройства управления рулением транспортного средства A.
Фиг. 20 является схемой для пояснения операций устройства управления рулением транспортного средства A.
Как показано во время t1 по фиг. 20, предполагается, что водитель выполняет операцию увеличивающегося руления руля 1 в то время, когда транспортное средство A движется. Затем модуль 11 вычисления параметров управления вычисляет целевой угол θ* поворота на основе угла δ поворота при рулении и скорости V транспортного средства (модуль 11A вычисления целевого угла поворота на фиг. 2). Затем, модуль 11 вычисления параметров управления вычисляет целевой ток при повороте на основе результата вычитания, который получается посредством вычитания фактического угла θ поворота из вычисленного целевого угла θ* поворота (модуль 11C вычисления целевого тока при повороте на фиг. 2). Таким образом, модуль 8 управления при повороте рулит управляемыми колесами 2 в ответ на рабочую величину для руля 1.
[0063] Кроме того, модуль 11 вычисления параметров управления также вычисляет осевую силу TFF прямой связи на основе угла δ поворота при рулении и скорости V транспортного средства (модуль 11Ba вычисления осевой силы прямой связи на фиг. 3). Затем, модуль 11 вычисления параметров управления вычисляет текущую осевую силу на основе тока при повороте (модуль 11Bba вычисления текущей осевой силы на фиг. 11). Затем, модуль 11 вычисления параметров управления вычисляет осевую силу поперечного G на основе поперечного ускорения Gy (модуль 11Bbb вычисления смешанной осевой силы на фиг. 11). Затем, модуль 11 вычисления параметров управления вычисляет осевую силу в зависимости от скорости относительно вертикальной оси на основе скорости δ относительно вертикальной оси и скорости V транспортного средства (модуль 11Bbb вычисления смешанной осевой силы на фиг. 11). Затем, модуль 11 вычисления параметров управления суммирует значение, которое получается посредством умножения вычисленной текущей осевой силы на коэффициент K2 распределения, значение, которое получается посредством умножения вычисленной осевой силы поперечного G на коэффициент K1 распределения, и значение, которое получается посредством умножения осевой силы в зависимости от скорости относительно вертикальной оси на коэффициент K3 распределения, между собой и задает результат суммирования как смешанную осевую силу TBR (модуль 11Bbb вычисления смешанной осевой силы на фиг. 11). Коэффициенты K1, K2 и K3 распределения осевой силы поперечного G, текущей осевой силы и осевой силы в зависимости от скорости относительно вертикальной оси задаются равными 0,6: 0,3: 0,1. Здесь, предполагается, что абсолютное значение угловой скорости dδ/dt руления меньше четвертой заданной угловой скорости dδ4/dt руления. Затем переменная K4 становится равной 1,0, переменная K5 становится равной 1,0, и коэффициент GB распределения (=K4×K5) становится равным 1,0 (модуль 11Bbe выполнения вычисления осевой силы обратной связи на фиг. 11). Затем модуль 11 вычисления параметров управления распределяет текущую осевую силу и смешанную осевую силу TBR, которые вычислены таким способом, с коэффициентом GB: (1-GB) и задает текущую осевую силу равной осевой силе TFB обратной связи (модуль 11Bb вычисления осевой силы обратной связи на фиг. 3). Затем, модуль 11 вычисления параметров управления распределяет осевую силу TFF прямой связи и осевую силу TFB обратной связи, которые вычислены таким способом, с коэффициентом GF: (1-GF) и вычисляет конечную осевую силу (модуль 11Bc вычисления конечной осевой силы на фиг. 3). Затем, модуль 11 вычисления параметров управления вычисляет целевую силу реакции при рулении на основе вычисленной конечной осевой силы (модуль 11Bd преобразования силы реакции при рулении и осевой силы на фиг. 3). Затем, модуль 11 вычисления параметров управления вычисляет целевой ток силы реакции на основе вычисленной целевой силы реакции при рулении (модуль 11Be вычисления целевого тока силы реакции на фиг. 3). Затем, модуль 11 вычисления параметров управления приводит в действие электромотор 9A для формирования силы реакции на основе вычисленного целевого тока силы реакции (модуль 9C приведения в действие электромотора для формирования силы реакции на фиг. 2). Таким образом, модуль 9 управления силой реакции прикладывает силу реакции при рулении к рулю 1.
[0064] Как описано выше, устройство управления рулением в одном варианте осуществления настоящего раскрытия вычисляет осевую силу TFB обратной связи на основе текущей осевой силы, смешанной осевой силы TBR и результата определения операции увеличивающегося руления и операции возвратного руления. Следовательно, устройство управления рулением в одном варианте осуществления настоящего раскрытия может вычислять осевую силу TFB обратной связи на основе результатов обнаружения датчиков, предоставленных в общем транспортном средстве, причем результаты обнаружения включают в себя ток при повороте поворотного электромотора 8A, поперечное ускорение Gy транспортного средства A и т.п. Следовательно, поскольку устройство управления рулением в одном варианте осуществления настоящего раскрытия приводит в действие электромотор 9A для формирования силы реакции на основе осевой силы TFB обратной связи, необязательно, чтобы устройство управления рулением включало в себя выделенный датчик для обнаружения осевой силы рулевой зубчатой рейки, и может подавляться увеличение затрат на изготовление.
[0065] Кроме того, когда операция увеличивающегося руления руля 1 выполняется, устройство управления рулением в одном варианте осуществления настоящего раскрытия задает текущую осевую силу равной осевой силе TFB обратной связи в случае, если абсолютное значение угловой скорости dδ/dt руления меньше четвертой заданной угловой скорости dδ4/dt руления. Следовательно, посредством задания текущей осевой силы равной осевой силе TFB обратной связи, устройство управления рулением в одном варианте осуществления настоящего раскрытия может прикладывать силу реакции при рулении для того, чтобы возвращать руль 1 в нейтральную позицию, аналогично механическому устройству управления рулением, в котором руль 1 и управляемые колеса 2 механически зацепляются друг с другом. Таким образом, во время операции увеличивающегося руления руля 1, устройство управления рулением в одном варианте осуществления настоящего раскрытия может прикладывать более надлежащую силу реакции при рулении.
[0066] Здесь, как показано во время t2 по фиг. 20, предполагается, что водитель заканчивает операцию увеличивающегося руления руля 1 и выполняет операцию возвратного руления. Затем переменная K4 становится равной 0,0, и коэффициент GB распределения (=K4×K5) становится равным 0,0 независимо от переменной K5 (модуль 11Bbe выполнения вычисления осевой силы обратной связи на фиг. 11). Затем модуль 11 вычисления параметров управления распределяет текущую осевую силу и смешанную осевую силу TBR, которые вычислены таким способом, с коэффициентом GB: (1-GB) и вычисляет смешанную осевую силу TBR как осевую силу TFB обратной связи (модуль 11Bb вычисления осевой силы обратной связи на фиг. 3). Таким образом, осевая сила TFB обратной связи переключается с текущей осевой силы на смешанную осевую силу TBR.
[0067] Как описано выше, когда операция возвратного руления руля 1 выполняется, устройство управления рулением в одном варианте осуществления настоящего раскрытия задает смешанную осевую силу TBR, в которой текущая осевая сила и осевая сила поперечного G распределяются с предварительно установленным коэффициентом распределения, равной осевой силе TFB обратной связи независимо от абсолютной величины абсолютного значения угловой скорости dδ/dt руления. Здесь, в механическом устройстве управления рулением, в котором руль 1 и управляемые колеса 2 механически зацепляются между собой, сила реакции при рулении для того, чтобы возвращать руль 1 в нейтральную позицию, формируется посредством поперечной силы Fd на шинах, которая соответствует рулению управляемыми колесами 2 во время операции возвратного руления руля 1. Следовательно, в механическом устройстве управления рулением во время операции возвратного руления руля 1, водитель уменьшает удерживающую силу для руля 1, заставляет плавно проскальзывать руль 1 по ладони, за счет этого возвращает руль 1 в нейтральную позицию и возвращает управляемые колеса 2 в нейтральную позицию. Напротив, в устройстве управления рулением в одном варианте осуществления настоящего раскрытия, смешанная осевая сила TBR задается равной осевой силе TFB обратной связи, в силу чего может подавляться снижение силы реакции при рулении для того, чтобы возвращать руль 1 в нейтральную позицию, даже если ток при повороте снижается, и текущая осевая сила снижается. Следовательно, устройство управления рулением в одном варианте осуществления настоящего раскрытия может возвращать руль 1 в нейтральную позицию таким образом, что водитель уменьшает удерживающую силу для руля 1 и заставляет плавно проскальзывать руль 1 по ладони, аналогично механическому устройству управления рулением. Таким образом, во время операции возвратного руления руля 1, устройство управления рулением в одном варианте осуществления настоящего раскрытия может прикладывать более надлежащую силу реакции при рулении.
[0068] Здесь, как показано во время t3 по фиг. 20, предполагается, что во время операции возвратного руления руля 1 (например, во время руления в направлении по часовой стрелке), водитель выполняет операцию увеличивающегося руления руля 1 по часовой стрелке впоследствии после того, как угол δ поворота при рулении выходит за пределы нейтральной позиции. Кроме того, предполагается, что абсолютное значение угловой скорости dδ/dt руления находится в диапазоне от четвертой заданной угловой скорости dδ4/dt руления или более до меньше пятой заданной угловой скорости dδ5/dt руления. Затем по мере того, как становится меньшим абсолютное значение угловой скорости dδ/dt руления, переменная K4 становится равной 1,0, переменная K5 увеличивается, и коэффициент GB распределения (=K4×K5) текущей осевой силы увеличивается (модуль 11Bbe выполнения вычисления осевой силы обратной связи на фиг. 11). Затем модуль 11 вычисления параметров управления распределяет текущую осевую силу и смешанную осевую силу TBR, которые вычислены таким способом, с коэффициентом GB: (1-GB) и вычисляет осевую силу TFB обратной связи (модуль 11Bb вычисления осевой силы обратной связи на фиг. 3). Таким образом, осевая сила TFB обратной связи постепенно переключается со смешанной осевой силы TBR на текущую осевую силу.
[0069] Как описано выше, в случае определения того, что операция увеличивающегося руления руля 1 выполняется, и определения того, что абсолютное значение угловой скорости dδ/dt руления составляет четвертую заданную угловую скорость dδ4/dt руления или больше, устройство управления рулением в одном варианте осуществления настоящего раскрытия распределяет текущую осевую силу и смешанную осевую силу TBR, чтобы задавать осевую силу TFB обратной связи, и помимо этого, увеличивает коэффициент распределения текущей осевой силы по мере того, как становится меньшим абсолютное значение угловой скорости dδ/dt руления. Следовательно, в случае если угол δ поворота при рулении выходит за пределы нейтральной позиции во время операции возвратного руления руля 1, и затем операция увеличивающегося руления руля 1 выполняется в направлении, идентичном направлению операции возвратного руления, в таком случае устройство управления рулением в одном варианте осуществления настоящего раскрытия может постепенно переключать осевую силу TFB обратной связи со смешанной осевой силы TBR на текущую осевую силу по мере того, как абсолютное значение угловой скорости dδ/dt руления постепенно уменьшается во время операции увеличивающегося руления. Таким образом, в такое время переключения с операции возвратного руления руля 1 в операцию увеличивающегося руления для этого, устройство управления рулением в одном варианте осуществления настоящего раскрытия может прикладывать более надлежащую силу реакции при рулении.
[0070] В одном варианте осуществления настоящего раскрытия, руль 1 на фиг. 1 составляет руль. Аналогично, датчик 3 угла поворота при рулении, поворотный электромотор 8A и модуль 8C приведения в действие поворотного электромотора на фиг. 1 составляют поворотный актуатор. Кроме того, модуль 8B обнаружения тока при повороте на фиг. 1 составляет модуль обнаружения тока при повороте. Кроме того, модуль 11Bb вычисления осевой силы обратной связи на фиг. 3 и модуль 11Bba вычисления текущей осевой силы на фиг. 11 составляют модуль вычисления текущей осевой силы. Кроме того, датчик 6 поперечного G на фиг. 1, модуль 11Bb вычисления осевой силы обратной связи на фиг. 3 и модуль 11Bbb вычисления смешанной осевой силы на фиг. 11 составляют модуль вычисления осевой силы поперечного G. Кроме того, модуль 11Bb вычисления осевой силы обратной связи и модуль 11Bd преобразования силы реакции при рулении и осевой силы на фиг. 3 и модуль 11Bbe выполнения вычисления осевой силы обратной связи на фиг. 11 составляют модуль вычисления силы реакции при рулении. Кроме того, электромотор 9A для формирования силы реакции и модуль 9C приведения в действие электромотора для формирования силы реакции на фиг. 1 и модуль 11B вычисления целевого тока силы реакции на фиг. 2 составляют актуатор силы реакции. Кроме того, модуль 11Bb вычисления осевой силы обратной связи на фиг. 3 и модуль 11Bbe выполнения вычисления осевой силы обратной связи на фиг. 11 составляют модуль вычисления осевой силы обратной связи. Кроме того, модуль 11Bd преобразования силы реакции при рулении и осевой силы на фиг. 3 составляет модуль выполнения вычисления силы реакции при рулении. Кроме того, датчик 6 поперечного G на фиг. 1 составляет модуль обнаружения поперечного ускорения.
[0071] ПРЕИМУЩЕСТВА В НАСТОЯЩЕМ РАСКРЫТИИ
Следующие преимущества обеспечиваются в одном варианте осуществления настоящего раскрытия
(1) Модуль 11 вычисления параметров управления вычисляет текущую осевую силу рулевой зубчатой рейки на основе тока при повороте. Кроме того, модуль 11 вычисления параметров управления вычисляет осевую силу поперечного G рулевой зубчатой рейки на основе поперечного ускорения Gy. Затем модуль 11 вычисления параметров управления вычисляет силу реакции при рулении на основе текущей осевой силы во время операции увеличивающегося руления руля 1 и вычисляет силу реакции при рулении на основе текущей осевой силы и осевой силы поперечного G во время операции возвратного руления руля 1.
В соответствии с такой конфигурацией, электромотор 9A для формирования силы реакции может приводиться в действие на основе результатов обнаружения датчиков, предоставленных в общем транспортном средстве, причем результаты обнаружения включают в себя ток при повороте, поперечное ускорение Gy и т.п. Следовательно, необязательно, чтобы устройство управления рулением включало в себя выделенный датчик, и может подавляться увеличение затрат на изготовление.
[0072] (2) Во время операции возвратного руления руля 1, модуль 11 вычисления параметров управления вычисляет силу реакции при рулении на основе смешанной осевой силы TBR, в которой текущая осевая сила и осевая сила поперечного G распределяются с предварительно установленным коэффициентом распределения GB: (1-GB).
В соответствии с такой конфигурацией, когда операция возвратного руления руля 1 выполняется, поскольку присутствует осевая сила поперечного G, может подавляться снижение силы реакции при рулении для того, чтобы возвращать руль 1 в нейтральную позицию, даже если ток при повороте снижается, и текущая осевая сила снижается. Следовательно, руль 1 может возвращаться в нейтральную позицию таким образом, что водитель уменьшает удерживающую силу для руля 1 и заставляет плавно проскальзывать руль 1 по ладони. Таким образом, во время операции возвратного руления руля 1, может прикладываться более надлежащая сила реакции при рулении.
[0073] (3) В случае определения того, что абсолютное значение угловой скорости dδ/dt руления меньше четвертой заданной угловой скорости dδ4/dt руления во время операции увеличивающегося руления руля 1, модуль 11 вычисления параметров управления вычисляет осевую силу TFB обратной связи на основе только текущей осевой силы. Затем, модуль 11 вычисления параметров управления вычисляет силу реакции при рулении на основе вычисленной осевой силы TFB обратной связи.
В соответствии с такой конфигурацией, например, когда операция увеличивающегося руления руля 1 выполняется, может прикладываться сила реакции при рулении для того, чтобы возвращать руль 1 в нейтральную позицию. Таким образом, во время операции увеличивающегося руления руля 1, может прикладываться более надлежащая сила реакции при рулении.
[0074] (4) В случае определения того, что абсолютное значение угловой скорости dδ/dt руления составляет четвертую заданную угловую скорость dδ4/dt руления или более во время операции увеличивающегося руления руля 1, модуль 11 вычисления параметров управления вычисляет осевую силу TFB обратной связи посредством распределения текущей осевой силы и смешанной осевой силы TBR. Затем, модуль 11 вычисления параметров управления увеличивает коэффициент распределения текущей осевой силы по мере того, как становится меньшим абсолютное значение угловой скорости dδ/dt руления.
В соответствии с такой конфигурацией, например, в случае если угол δ поворота при рулении выходит за пределы нейтральной позиции во время операции возвратного руления руля 1, и затем операция увеличивающегося руления руля 1 выполняется в направлении, идентичном направлению операции возвратного руления, в таком случае осевая сила TFB обратной связи может постепенно переключаться со смешанной осевой силы TBR на текущую осевую силу по мере того, как абсолютное значение угловой скорости dδ/dt руления постепенно уменьшается во время операции увеличивающегося руления.
[0075] (5) Модуль 11 вычисления параметров управления распределяет угол δ поворота при рулении и скорость V транспортного средства с коэффициентом распределения GF:(1-GF) и вычисляет осевую силу прямой связи. Затем, модуль 11 вычисления параметров управления приводит в действие электромотор 9A для формирования силы реакции на основе осевой силы обратной связи и осевой силы прямой связи.
В соответствии с такой конфигурацией, электромотор 9A для формирования силы реакции приводится в действие на основе осевой силы прямой связи в дополнение к осевой силе обратной связи, и, соответственно, может прикладываться более надлежащая сила реакции при рулении.
(6) Датчик 6 поперечного G обнаруживает поперечное ускорение Gy. Затем, модуль 11 вычисления параметров управления вычисляет осевую силу поперечного G на основе поперечного ускорения Gy, обнаруженного посредством датчика 6 поперечного G.
В соответствии с такой конфигурацией, электромотор 9A для формирования силы реакции может приводиться в действие на основе результата обнаружения датчика 6 поперечного G.
Данная заявка притязает на приоритет заявки на патент (Япония) № 2013-3873 (поданной 11 января 2013 года), содержимое которой полностью содержится по ссылке в качестве части этого раскрытия.
Хотя настоящее раскрытие описано в отношении точного числа вариантов осуществления, объем настоящего раскрытия не ограничен этим, и улучшения и модификации вариантов осуществления на основе вышеописанного раскрытия являются очевидными для специалистов в данной области техники.
СПИСОК НОМЕРОВ ССЫЛОК
[0076] 1 – руль (руль)
3 – датчик угла поворота при рулении (поворотный актуатор)
6 – датчик поперечного G (модуль вычисления осевой силы поперечного G, модуль обнаружения поперечного ускорения)
8A – поворотный электромотор (поворотный актуатор)
8B – модуль обнаружения тока при повороте (модуль обнаружения тока при повороте)
8C – модуль приведения в действие поворотного электромотора (поворотный актуатор)
9A – электромотор для формирования силы реакции (актуатор силы реакции)
9C – модуль приведения в действие электромотора для формирования силы реакции (актуатор силы реакции)
11B – модуль вычисления целевого тока силы реакции (актуатор силы реакции)
11Bb – модуль вычисления осевой силы обратной связи (модуль вычисления текущей осевой силы, модуль вычисления осевой силы поперечного G, модуль вычисления силы реакции при рулении, модуль вычисления осевой силы обратной связи)
11Bba – модуль вычисления текущей осевой силы (модуль вычисления текущей осевой силы)
11Bbb – модуль вычисления смешанной осевой силы (модуль вычисления осевой силы поперечного G)
11Bbd – модуль определения осевой силы и руления (модуль вычисления силы реакции при рулении, модуль выполнения вычисления силы реакции при рулении)
11Bbe – модуль выполнения вычисления осевой силы обратной связи (модуль вычисления силы реакции при рулении, модуль вычисления осевой силы обратной связи)
11Bd – модуль преобразования силы реакции при рулении и осевой силы (модуль вычисления силы реакции при рулении)
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ РУЛЕНИЕМ | 2013 |
|
RU2643409C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РУЛЕНИЕМ | 2013 |
|
RU2582012C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РУЛЕНИЕМ | 2013 |
|
RU2581808C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РУЛЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ УПРАВЛЕНИЯ РУЛЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2643748C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РУЛЕНИЕМ | 2013 |
|
RU2581809C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РУЛЕНИЕМ | 2013 |
|
RU2582517C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ УСТОЙЧИВОСТЬЮ | 2013 |
|
RU2644063C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РУЛЕНИЕМ | 2013 |
|
RU2576553C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РУЛЕНИЕМ | 2013 |
|
RU2623359C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РУЛЕНИЕМ | 2014 |
|
RU2627262C2 |
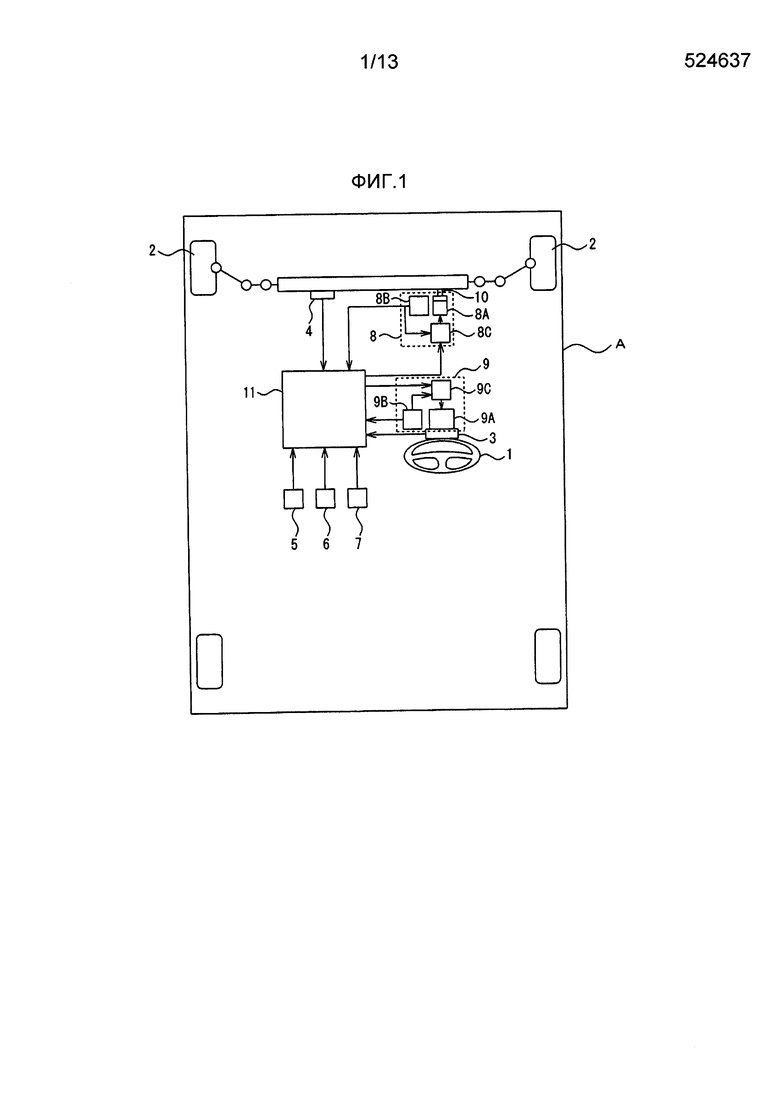
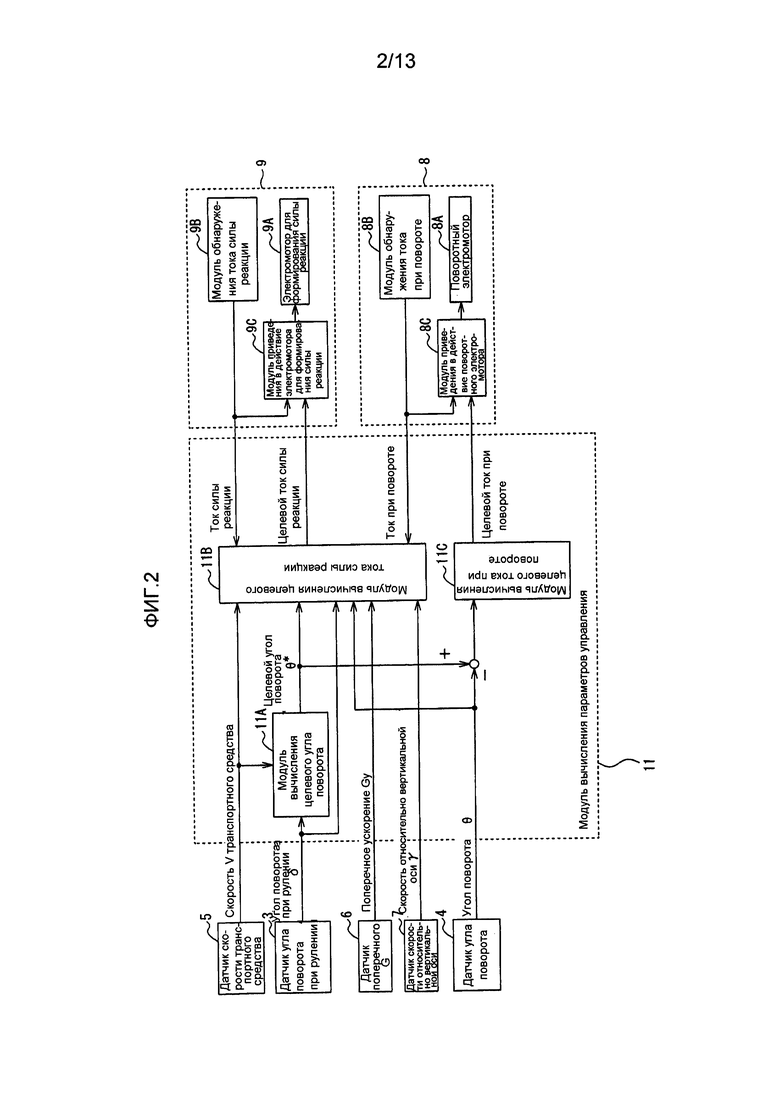
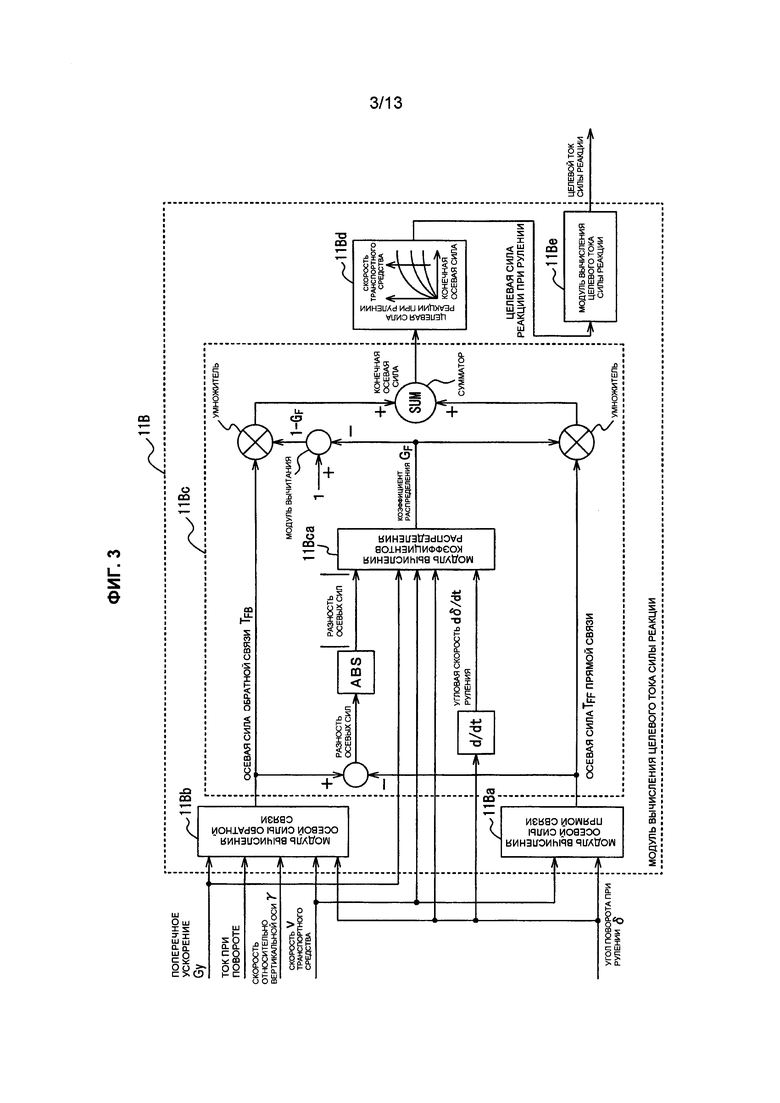
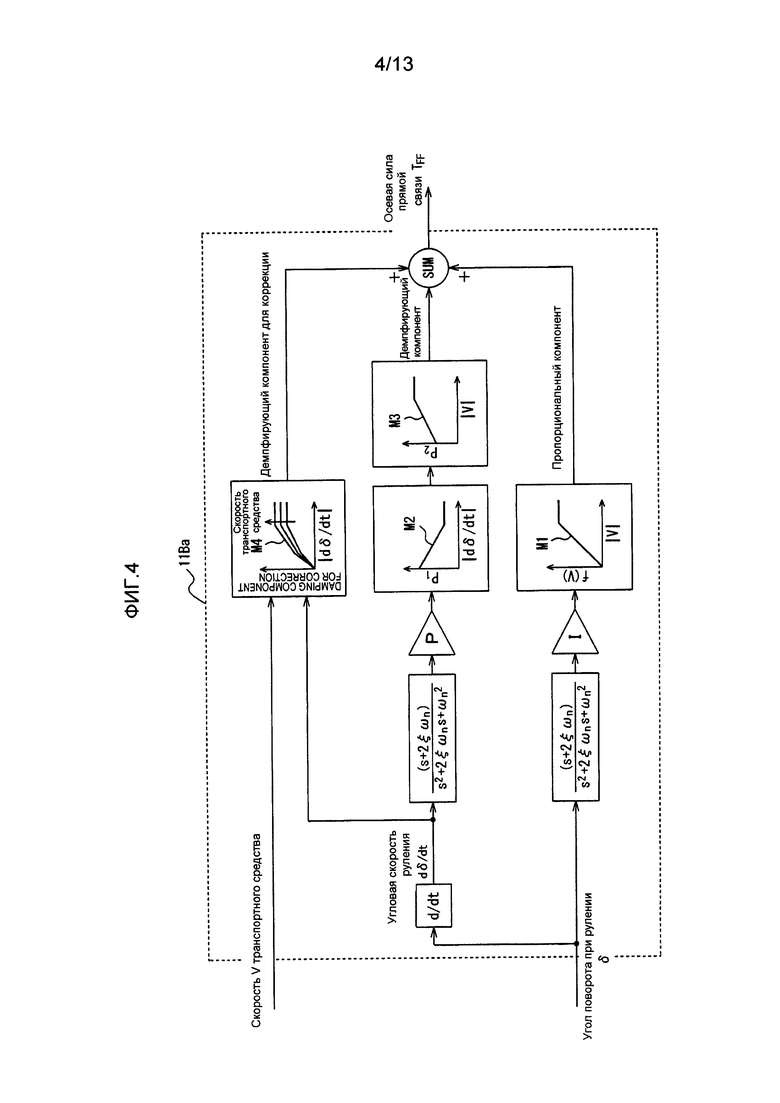
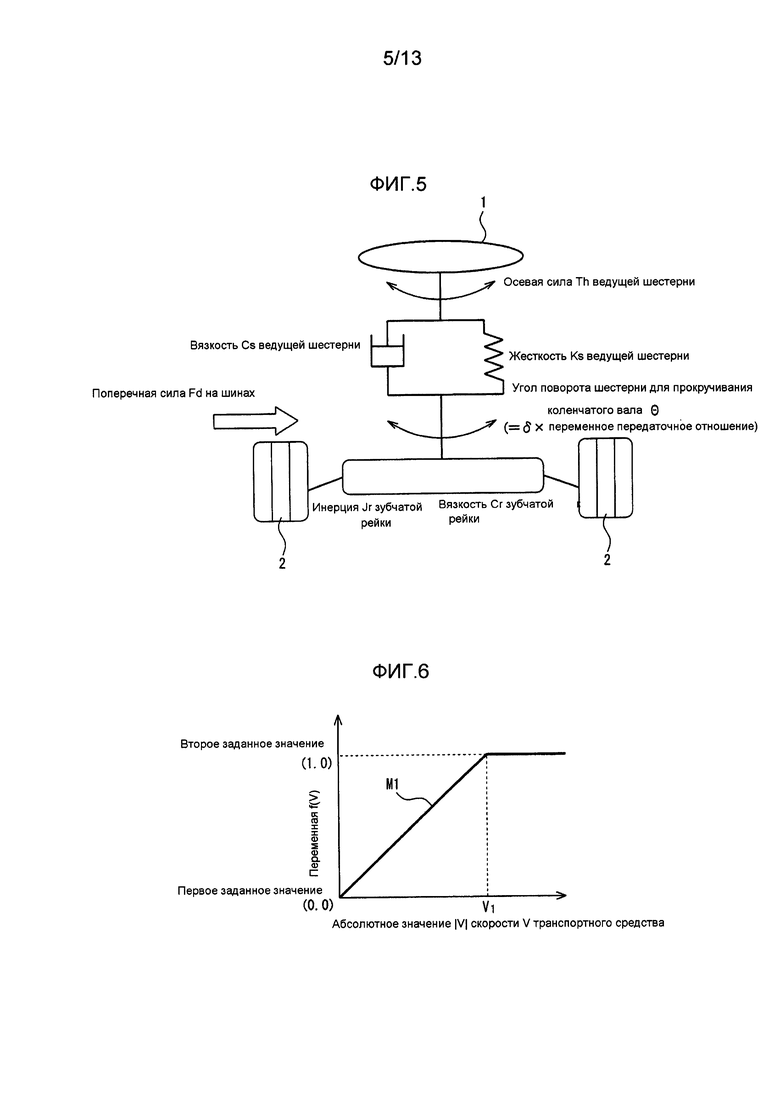
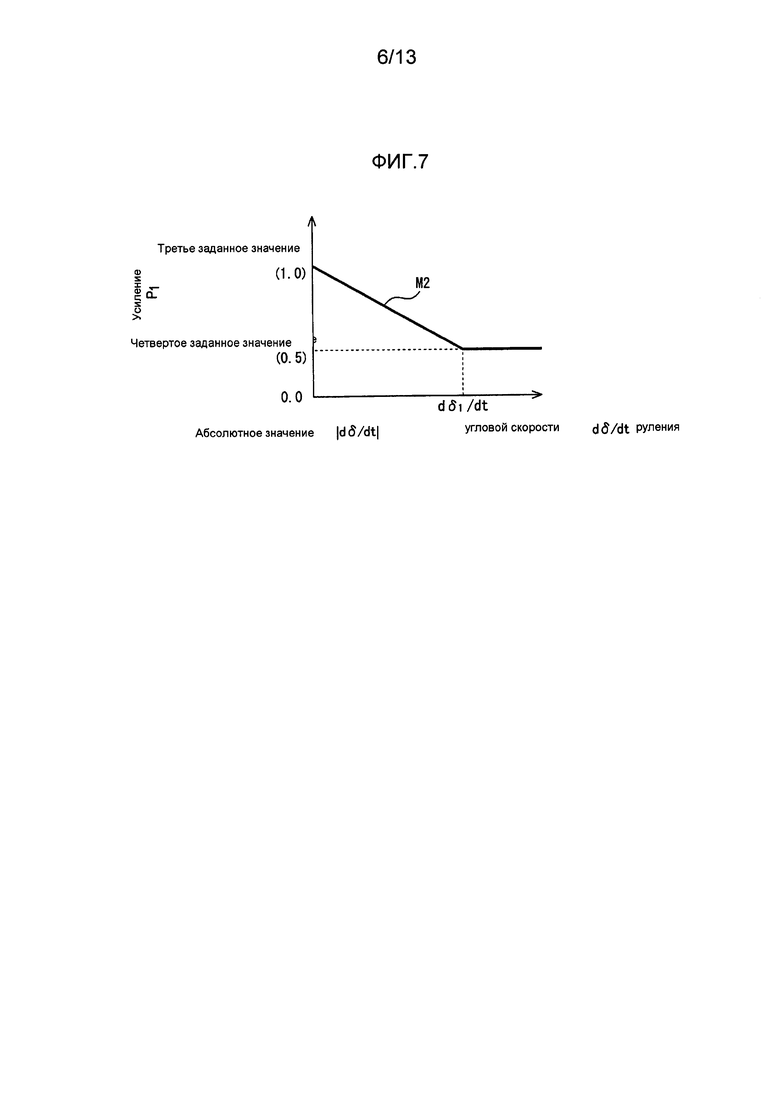
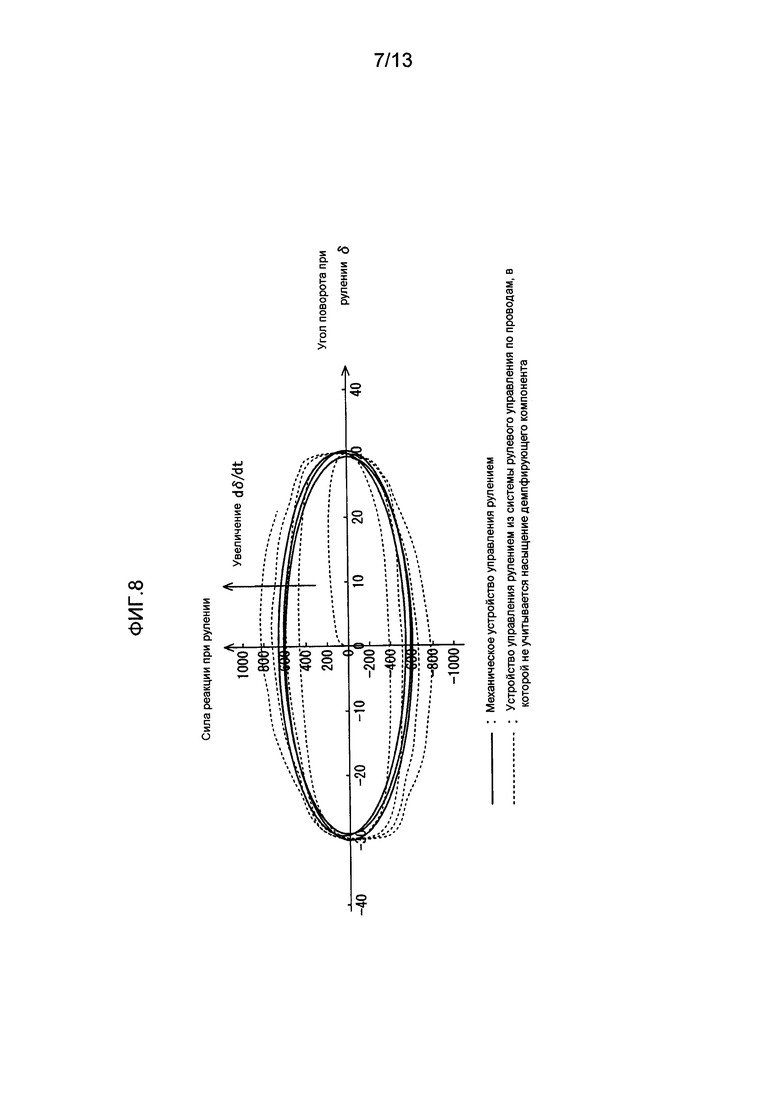
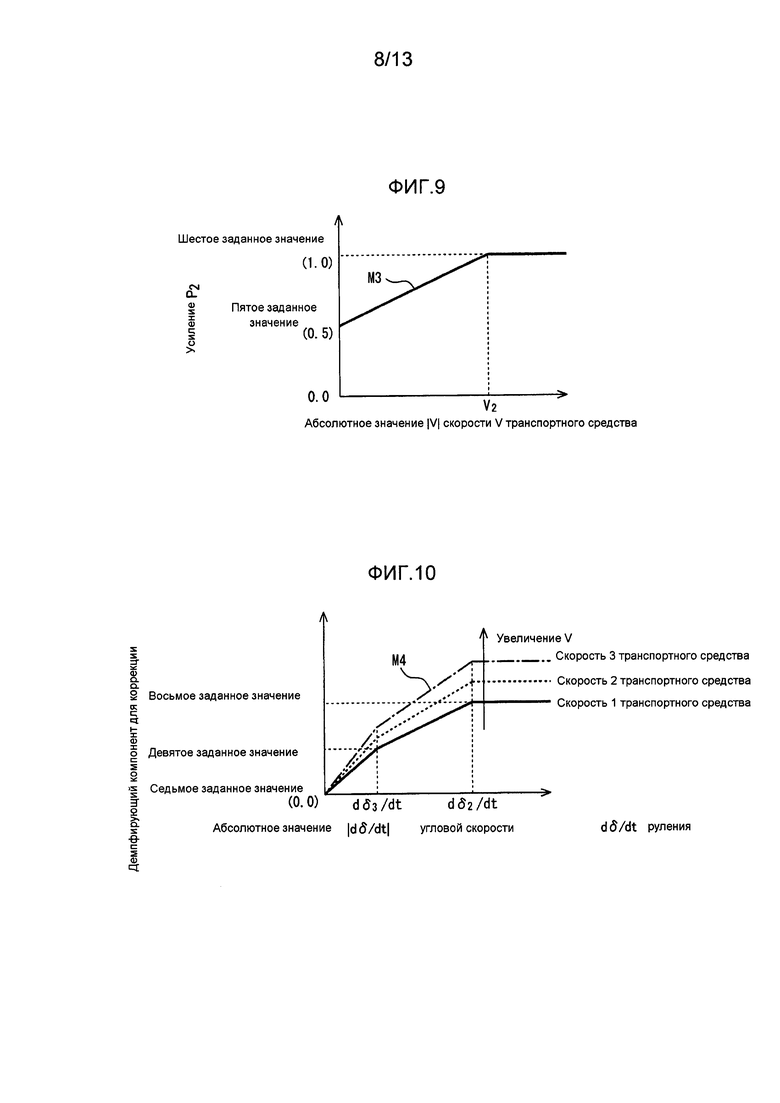
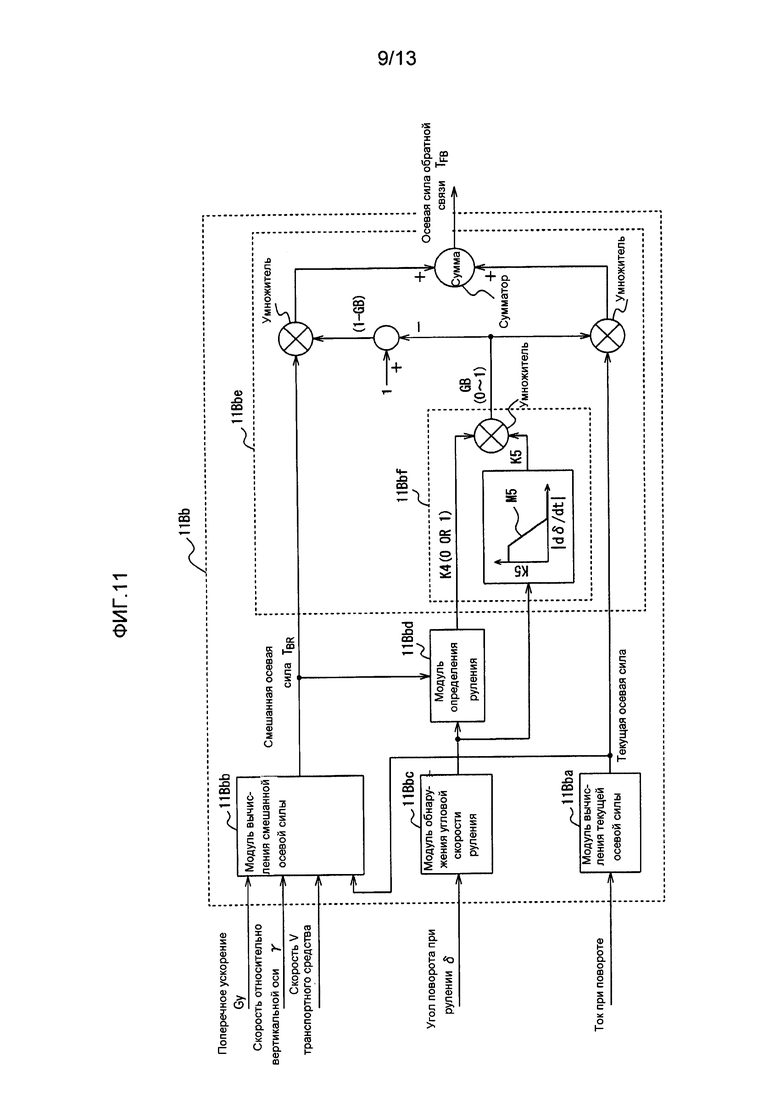
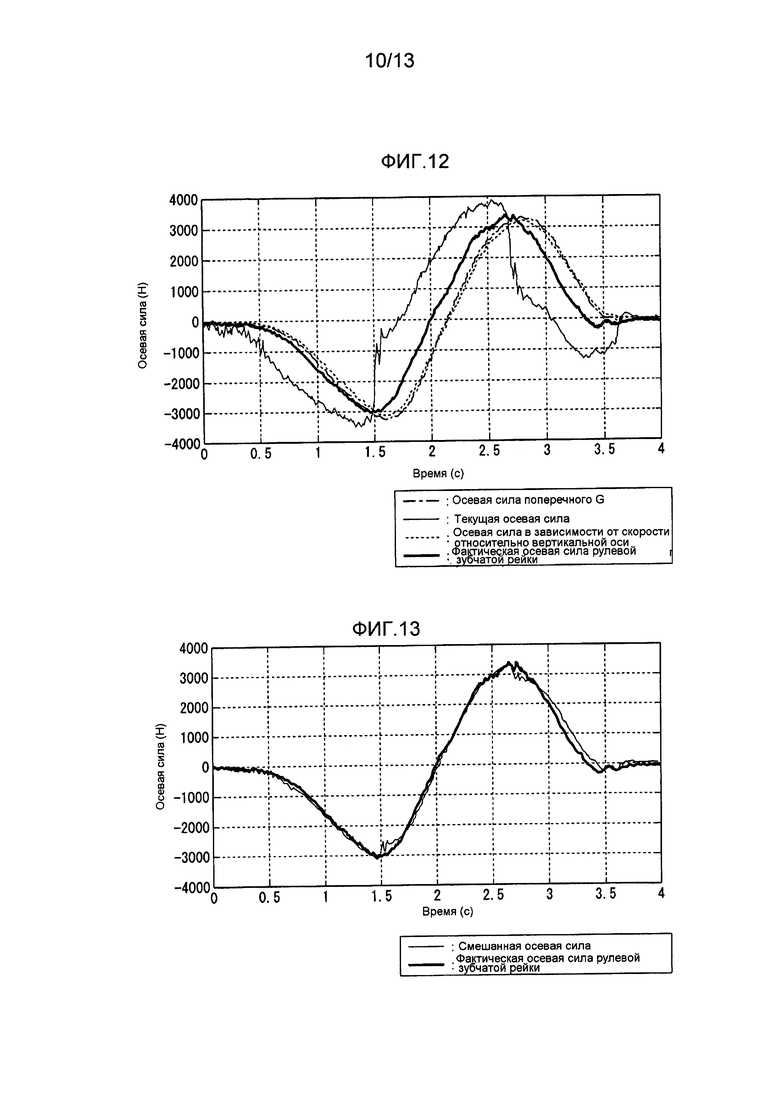
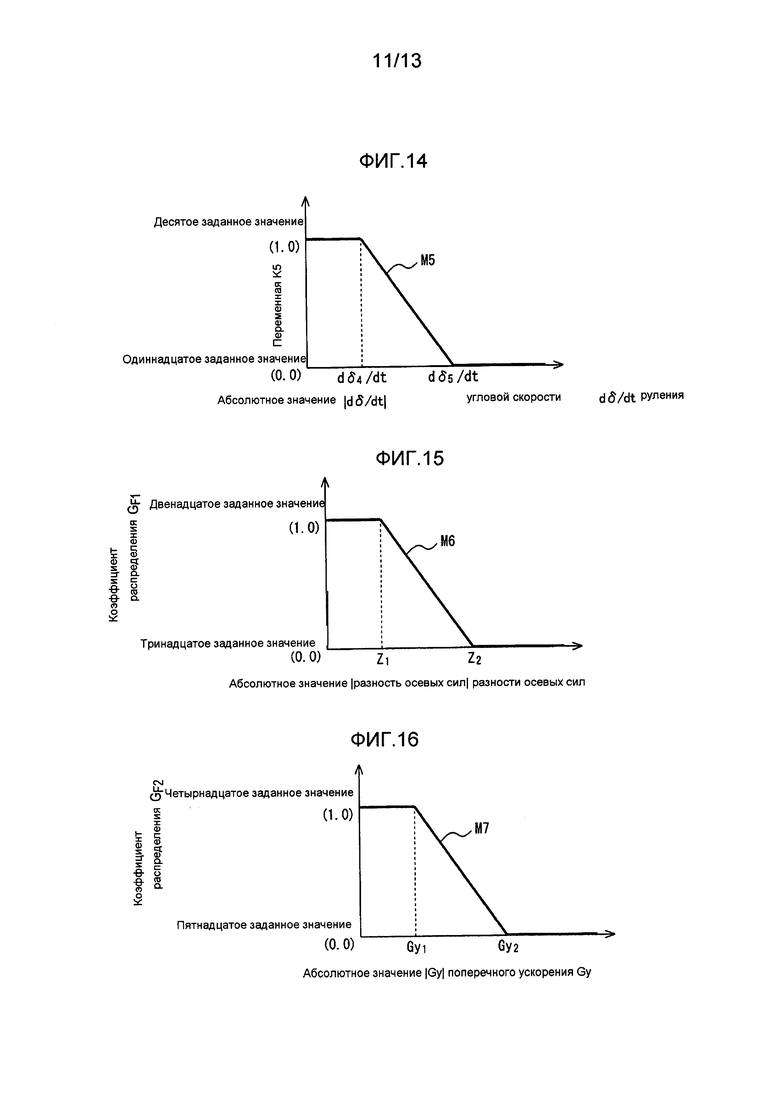
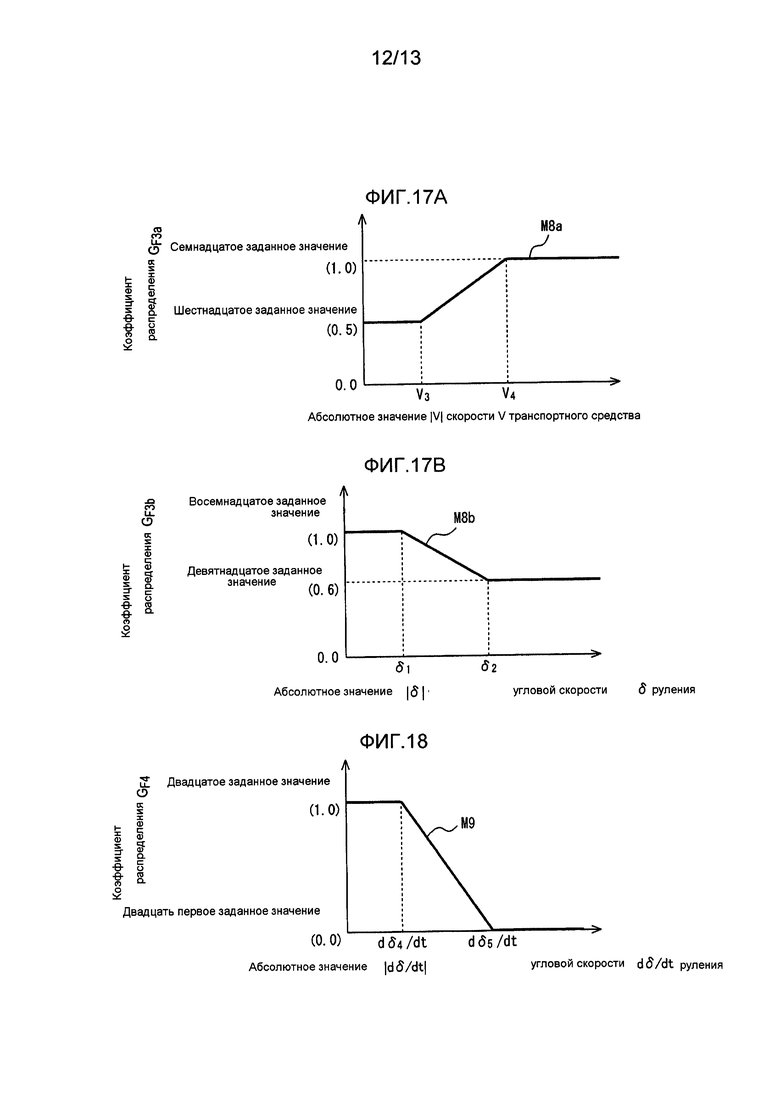
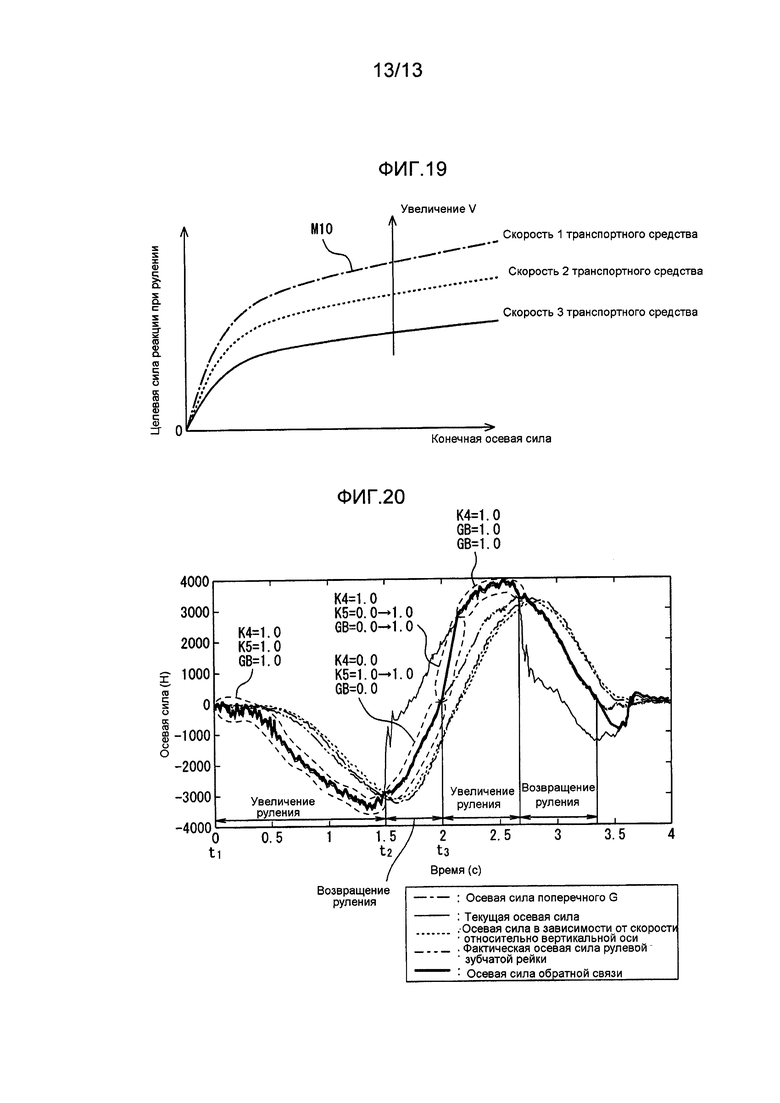
Изобретение относится к области транспортного машиностроения. Устройство управления рулением содержит руль, поворотный актуатор, модуль обнаружения тока при повороте, модуль вычисления текущей осевой силы, модуль вычисления осевой силы поперечного G, модуль вычисления силы реакции при рулении и актуатор силы реакции. Модуль обнаружения тока при повороте обнаруживает ток при повороте, протекающий через поворотный актуатор. Модуль вычисления текущей осевой силы вычисляет текущую осевую силу рулевой зубчатой рейки на основе тока при повороте. Модуль вычисления осевой силы поперечного G вычисляет осевую силу поперечного G рулевой зубчатой рейки на основе поперечного ускорения, действующего на транспортное средство. Модуль вычисления силы реакции при рулении вычисляет силу реакции при рулении на основе текущей осевой силы во время операции увеличивающегося руления руля и вычисляет силу реакции при рулении на основе текущей осевой силы и осевой силы поперечного G во время операции возвратного руления руля. Достигается возможность определения осевой силы зубчатой рейки. 6 з.п. ф-лы, 21 ил.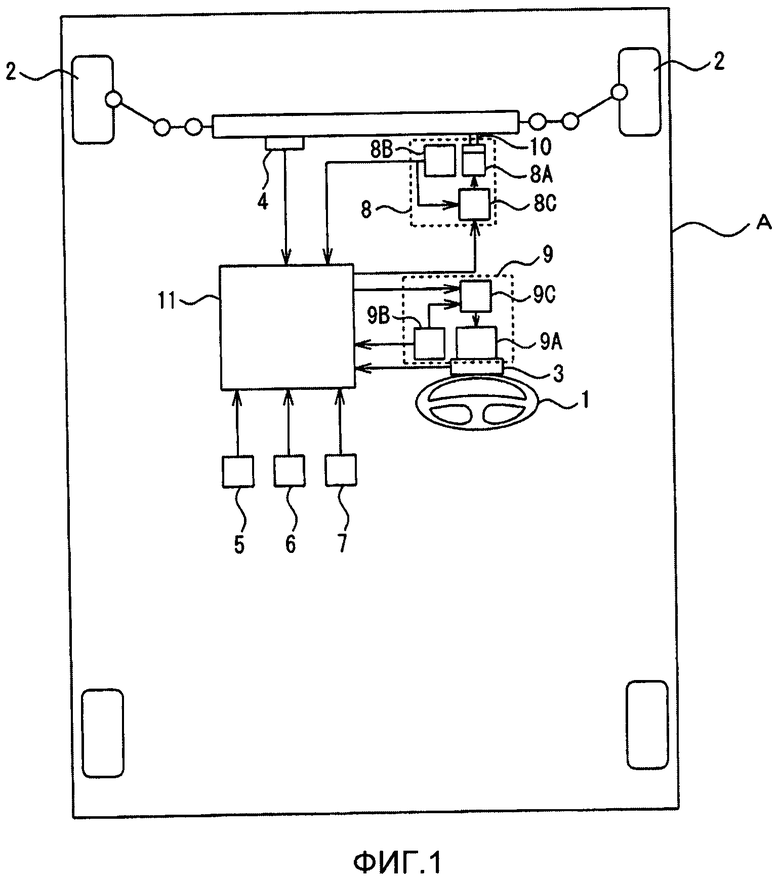
1. Устройство управления рулением, содержащее:
- руль, механически отделенный от управляемых колес;
- поворотный актуатор, выполненный с возможностью поворачивать управляемые колеса в соответствии с рабочей величиной для руля;
- модуль обнаружения тока при повороте, выполненный с возможностью обнаруживать ток при повороте, протекающий через поворотный актуатор;
- модуль вычисления текущей осевой силы, выполненный с возможностью вычислять текущую осевую силу рулевой зубчатой рейки на основе тока при повороте;
- модуль вычисления осевой силы поперечного G, выполненный с возможностью вычислять осевую силу поперечного G рулевой зубчатой рейки на основе поперечного ускорения, действующего на транспортное средство;
- модуль вычисления силы реакции при рулении, выполненный с возможностью вычислять силу реакции при рулении на основе, по меньшей мере, либо текущей осевой силы, вычисленной посредством модуля вычисления текущей осевой силы, либо осевой силы поперечного G, вычисленной посредством модуля вычисления осевой силы поперечного G; и
- актуатор силы реакции, выполненный с возможностью прикладывать силу реакции при рулении, вычисленную посредством модуля вычисления силы реакции при рулении,
- при этом модуль вычисления силы реакции при рулении выполнен с возможностью вычислять силу реакции при рулении на основе текущей осевой силы во время операции увеличивающегося руления руля и вычислять силу реакции при рулении на основе текущей осевой силы и осевой силы поперечного G во время операции возвратного руления руля, так что распределение осевой силы поперечного G во время операции возвратного руления превышает распределение осевой силы поперечного G во время операции увеличивающегося руления.
2. Устройство управления рулением по п.1, в котором во время операции возвратного руления руля модуль вычисления силы реакции при рулении выполнен с возможностью вычислять силу реакции при рулении на основе смешанной осевой силы, в которой текущая осевая сила и осевая сила поперечного G распределяются с предварительно установленным коэффициентом распределения.
3. Устройство управления рулением по п.2, в котором модуль вычисления силы реакции при рулении выполнен с возможностью включать в себя модуль вычисления осевой силы обратной связи, выполненный с возможностью вычислять осевую силу обратной связи на основе только текущей осевой силы в случае, если определяется то, что абсолютное значение угловой скорости руления руля меньше заданного значения во время операции увеличивающегося руления руля; и модуль выполнения вычисления силы реакции при рулении, выполненный с возможностью вычислять силу реакции при рулении на основе осевой силы обратной связи, вычисленной посредством модуля вычисления осевой силы обратной связи.
4. Устройство управления рулением по п.3, в котором в случае, если определяется то, что абсолютное значение угловой скорости руления руля равно или превышает заданное значение во время операции увеличивающегося руления руля, модуль вычисления осевой силы обратной связи выполнен с возможностью вычислять осевую силу обратной связи посредством распределения текущей осевой силы и смешанной осевой силы и увеличивать коэффициент распределения текущей осевой силы по мере того, как становится меньшим абсолютное значение угловой скорости руления.
5. Устройство управления рулением по п.3, дополнительно содержащее модуль вычисления осевой силы прямой связи, выполненный с возможностью вычислять осевую силу прямой связи на основе угла поворота руля при рулении и скорости транспортного средства транспортного средства, при этом модуль выполнения вычисления силы реакции при рулении выполнен с возможностью распределять, с предварительно установленным коэффициентом распределения, осевую силу обратной связи, вычисленную посредством модуля вычисления осевой силы обратной связи, и осевую силу прямой связи, вычисленную посредством модуля вычисления осевой силы прямой связи, и вычислять силу реакции при рулении.
6. Устройство управления рулением по п.1, дополнительно содержащее модуль обнаружения поперечного ускорения, выполненный с возможностью обнаруживать поперечное ускорение транспортного средства, при этом модуль вычисления осевой силы поперечного G выполнен с возможностью вычислять осевую силу поперечного G на основе поперечного ускорения, обнаруженного посредством модуля обнаружения поперечного ускорения.
7. Устройство управления рулением по п.4, дополнительно содержащее модуль вычисления осевой силы прямой связи, выполненный с возможностью вычислять осевую силу прямой связи на основе угла поворота руля при рулении и скорости транспортного средства транспортного средства, при этом модуль выполнения вычисления силы реакции при рулении выполнен с возможностью распределять, с предварительно установленным коэффициентом распределения, осевую силу обратной связи, вычисленную посредством модуля вычисления осевой силы обратной связи, и осевую силу прямой связи, вычисленную посредством модуля вычисления осевой силы прямой связи, и вычислять силу реакции при рулении.
| JP 2007137287 A, 07.06.2007 | |||
| JP 2008189107 A, 21.08.2008 | |||
| АДАПТИВНАЯ СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2002 |
|
RU2239576C2 |

