Изобретение относится к устройствам обнаружения объектов из металла, проносимых проверяемыми лицами через контрольное пространство.
Известен патент RU 49287 U1, опубликован 10.11.2005 г., «Металлообнаружитель». Металлообнаружитель выполнен в виде двух вертикальных стоек, внутри которых установлены две намагничивающие катушки и две приемные катушки, причем намагничивающие катушки соединены между собой последовательно и подключены к генератору, а две приемные катушки, соединены между собой последовательно и подключены к усилителю, выход которого подключен к первому входу синхронного детектора, выход которого соединен с входом анализатора, выход которого соединен со входом блока индикации, устройство управления, первый выход которого соединен с входом генератора, а второй выход соединен со вторым входом синхронного детектора, дополнительно намагничивающие катушка установлены ортогонально в центре одной из стоек, при этом одна из намагничивающих катушек установлена вертикально, а вторая горизонтально перпендикулярно плоскости зоны контроля и приемные катушки установлены симметрично горизонтально и встречно в другой стойке, причем расстояние между приемными катушками выбирается в зависимости от ширины зоны контроля. Недостатком данного металлообнаружителя является отсутствие многозонности.
Известен патент RU 2251125 C1, опубликован 27.04.2005 г., «Селективный металлодетектор с гармоническим возбуждением». Селективный металлодетектор содержит две приемные катушки, фазовращатель, передающую катушку, генератор, синхронные детекторы, вычислительный блок и блок индикации. Вычислительный блок выполнен в виде процессора, а генератор выполнен в виде преобразователя. Недостатком данного металлообнаружителя является отсутствие многозонности.
Известен патент US 5680103(A) взятый за прототип, опубликован 21.10.1997 г, «Metal detection system» («Система обнаружения металла»). Система обнаружения металла содержащая: генератор, катушку генерации поля, соединенную и возбуждаемую генератором, для генерирования электромагнитного поля равномерной плотности, которое нарушается при наличии в нем металлических предметов, множество первых приемных катушек, установленных вертикально на одной стороне прохода, множество вторых приемных катушек, установленных вертикально на другой стороне прохода, каждая из приемных катушек соединена с отдельной цепью детектора, каждый детектор включает средство для обнаружения нарушения электромагнитного поля, принимаемого соответствующей приемной катушкой, и выдачи сигнала обнаружения; обработка выходных сигналов обнаружения от цепей детектора для генерации сигнала положения, указывающего приближенное горизонтальное и вертикальное расположение каждого отдельного объекта из металла и сигнала о массе объекта; средство для сравнения каждого сигнала с пороговым значением и средство для вывода индикации тревоги.
Известны статьи,
1) Березанский Д.П. «Металлодетекторы - обнаружители оружия. Обзор принципов действия». Специальная техника, 1998, №4-5.
2) Синелыциков Г.А. «Зарубежные арочные металлодетекторы: осознанный выбор». Специальная техника, 1999, №1-2.
Техническая задача заключается в расширении арсенала технических средств того же назначения, создание многозонного металлообнаружителя, способного определять местоположение объектов из металла в контрольном пространстве.
Техническая задача в металлообнаружителе многозонном содержащем передающие катушки, установленные вертикально на одной стороне прохода, приемные катушки, установленные вертикально на другой стороне прохода, блок индикации, блок управления, соединенный с передающими и приемными катушками и генерирующий сигнал о наличии и местоположении объектов из металла в контрольном пространстве на блок индикации, достигается тем, что блок управления определяет местоположение объекта из металла путем последовательного включения каждой из передающих катушек для генерации электромагнитного поля в части контрольного пространства, одновременной при этом обработки сигнала каждой приемной катушки, включающей определение наличия объекта из металла в каждой зоне обнаружения между передающей и каждой приемной катушкой, вычисления местоположения объектов из металла в контрольном пространстве на основе данных о наличии объектов из металла в каждой зоне обнаружения.
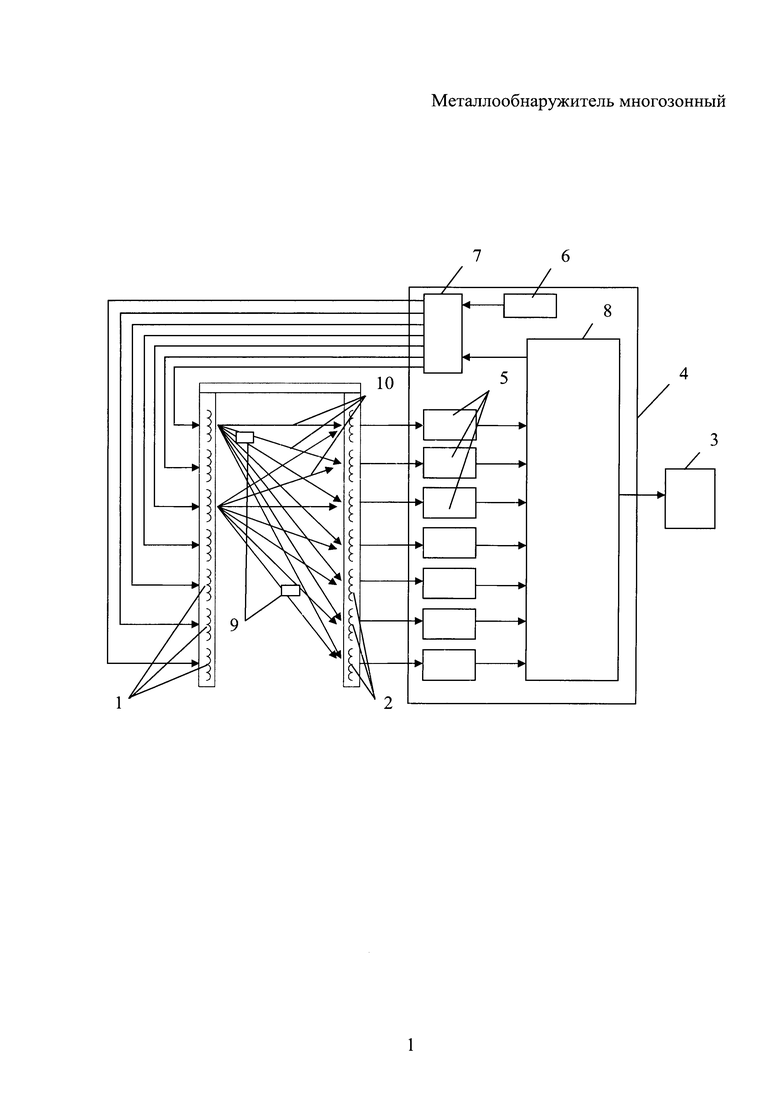
На чертеже изображена общая схема многозонного металлообнаружителя.
Металлообнаружитель содержит передающие катушки 1, приемные катушки 2, блок индикации 3, соединенные с блоком управления 4.
Передающие катушки 1 и приемные катушки 2 установлены вертикально с одной и другой стороны прохода и формируют контрольное пространство. Каждая из передающих 1 и приемных 2 катушек выполнена в виде двух круглых катушек, соединенных в противофазе, что позволяет повысить защищенность передающих и приемных сигналов от внешних помех. Каждая передающая катушка 1 при включении формирует электромагнитное поле в части контрольного пространства, при этом вектор электромагнитного поля будет направлен от передающей катушки 1 к приемным катушкам 2. Таким образом, каждая передающая катушка 1 и каждая приемная катушка 2 образуют между собой локальную зону обнаружения 10 (на чертеже показано схематично). Локальная зона обнаружения 10 физически подобна лучу проходящему от каждой передающей катушки 1 к каждой приемной катушке 2, при этом ширина луча аппроксимируется и равна ширине катушек.
Блок индикации 3 может быть выполнен в виде светодиодной панели или жидкокристалического дисплея и дополнен устройством звукового оповещения, и предназначен для отображения и звукового оповещения сигнала о наличии и местоположении объектов из металла в контрольном пространстве. Блок индикации 3 может быть установлен в панели металлообнаружителся или в раме, соединяющей панели металлообнаружителя в арочную конструкцию (не показано).
Блок управления 4 выполнен на базе программируемой логической интегральной схемы (ПЛИС). ПЛИС позволяет производить параллельную многоканальную цифровую и математическую обработку сигналов, при этом электрическая принципиальная схема разрабатывается в отладочной среде или программированием на специальных языках программирования, например Verilog, VHDL, AHDL - языки описания аппаратуры интегральных схем. Такая программа компилируется и прошивается в ПЛИС, в результате чего ПЛИС становится электронным цифровым устройством с определенным программой функционалом.
Блок управления 4 содержит генератор 6, соединенный с демультиплексором 7, выходы которого соединены с передающими катушками 1; цепи детектирования 5 сигнала каждой приемной катушки 2; модуль управления 8, принимающий сигналы от цепей детектирования 5 и соединенный с демультиплексором 7 для управления.
Демультиплексор 7 обеспечивает передачу сигнала от генератора 6 к одной из передающих катушек, реализуя последовательное включение каждой из передающих катушек 1, для генерации электромагнитного поля в части контрольного пространства.
Каждая приемная катушка 2 соединена с соответствующей цепью детектирования 5, для параллельной обработки сигнала каждой приемной катушки. Цепь детектирования 5 состоит из последовательно соединенных первого усилителя, сумматора, аналого-цифрового преобразователя, второго усилителя, полосового фильтра, узла свертки, интегратора, пикового детектора, дополнительно опорный сигнал подается на узел свертки и через цифроаналоговый преобразователь - на сумматор (не показаны). Выше рассмотрен один из примеров реализации цепи детектирования, позволяющей выделить отклонение амплитудной и фазовой составляющей сигнала приемной катушки 2, возникающее при нахождении объекта из металла 9 в локальной зоне обнаружения 10. Анализ значения амплитудной и фазовой составляющей сигнала и отношения их значений позволяет определить тип металла, из которого сделаны объекты, находящиеся в контрольной зоне, определить массу или объем металла, а также обеспечить селективность обнаружения по массе или по типу металла, то есть обеспечить «не обнаружение» заданных объектов, например личных вещей из металла, телефонов, ключей и др. Таким образом, каждая цепь детектирования 5 выдает сигнал о нахождении объекта из металла в соответствующей локальной зоне обнаружения 10 между соответствующей передающей и приемной катушкой.
Модуль управления 8 обеспечивает последовательное включение передающих катушек 1, принимает и обрабатывает сигналы с цепей детектирования 5, вычисляет местоположение объектов из металла в контрольном пространстве, передает сигналы о наличии и местоположении объектов из металла в контрольном пространстве на блок индикации 3.
Металлообнаружитель многозонный работает следующим образом.
Блок управления 4 последовательно включает каждую из передающих катушек 1, при этом модуль управления 8 подает сигнал управления демультиплексору 7, который перенаправляет сигнал от генератора 6 на одну из передающих катушек 1.
Включенная передающая катушка 1 генерирует электромагнитное поле в части контрольного пространства металлообнаружителя. Наведенный электродвижущей силой (ЭДС) сигнал в каждой приемной катушке 2 поступает на вход соответствующей цепи детектора 5, где усиливается первым усилителем, складывается в сумматоре с сигналом компенсации, сформированным ЦАП из опорного сигнала, и преобразуется с помощью АЦП в цифровой вид. Далее сигнал поступает на второй усилитель, затем полосовым фильтром выделяется основная гармоника рабочей частоты, после чего сигнал подвергается функции математической свертки в узле свертки. Свертка сигнала осуществляется с опорным сигналом и его сдвинутой на 90° копией, что позволяет выделить амплитуду и фазу сигнала. Далее амплитудная и фазовая составляющие сигнала проходят через интегратор, где выделяется, в том числе отклонение амплитудной и фазовой составляющей сигнала от среднего значения покоя, и проходят через пиковый детектор, чтобы отделить девиацию амплитуды и фазы сигнала от шумовой составляющей. Девиация амплитуды и фазы сигнала на приемной катушке 2 возникают при нахождении объекта из металла 9 в локальной зоне обнаружения 10 между передающей и приемной катушкой. После анализа наведенной ЭДС в каждой приемной катушке 2 модуль управления 8 включает следующую передающую катушку 1 и вновь анализирует сигналы с приемных катушек 2. Таким образом, блок управления 4 определяет наличие объекта из металла в каждой локальной зоне обнаружения 10 независимо от другой зоны.
Блок управления 4 вычисляет местоположение объекта из металла 9 в контрольном пространстве следующим образом. Каждая передающая катушка 1 и каждая приемная катушка 2 формируют между собой локальную зону обнаружения 10, таким образом, при включении одной передающей катушки 1 будет сформировано несколько локальных зон обнаружения 10 по отношению к каждой приемной катушке 2. Локальные зоны обнаружения 10 формируемые разными передающими катушками 1 пересекаются в контрольном пространстве.
Контрольное пространство металлообнаружителя в электронном виде можно представить как двухмерный массив пикселей. Геометрические размеры и расположение каждой локальной зоны обнаружения 10 в контрольном пространстве известны, поскольку известны размеры контрольного пространства и размеры катушек. Тогда каждой локальной зоне обнаружения 10 будет соответствовать определенный набор пикселей, при этом один и тот же пиксель может принадлежать нескольким локальным зонам обнаружения 10, так как они пересекаются в контрольном пространстве.
Каждый перемещаемый через контрольное пространство металлический объект 9, вызовет девиации амплитуды и фазы сигнала в нескольких локальных зонах обнаружения 10. Если «подсветить» пиксели зон обнаружения 10, в которых были обнаружены металлические объекты 9, а затем «погасить» пиксели зон обнаружения 10, в которых не было обнаружено металлических объектов 9, то в итоге, в двумерном массиве пикселей, будут «подсвечены» только области пикселей, которые указывают местоположение металлических объектов 9 в контрольном пространстве, что и требовалось вычислить.
После вычисления блок управления 4 выводит информацию о местоположении объекта(ов) из металла в контрольном пространстве на блок индикации 3.
Металлообнаружитель многозонный вычисляет местоположение объектов из металла в контрольном пространстве на основе данных о наличии объектов из металла в каждой локальной зоне обнаружения, решая поставленную техническую задачу.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕТАЛЛООБНАРУЖИТЕЛЬ МНОГОЗОННЫЙ МНОГОЧАСТОТНЫЙ С ГАРМОНИЧЕСКИМ ВОЗБУЖДЕНИЕМ | 2018 |
|
RU2672162C1 |
| СПОСОБ ОБНАРУЖЕНИЯ МЕТАЛЛИЧЕСКИХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ - МЕТАЛЛООБНАРУЖИТЕЛЬ | 2017 |
|
RU2671914C1 |
| ОБНАРУЖИТЕЛЬ ФЕРРОМАГНИТНЫХ ОБЪЕКТОВ | 2017 |
|
RU2668317C1 |
| МЕТАЛЛООБНАРУЖИТЕЛЬ МНОГОЗОННЫЙ | 2018 |
|
RU2680854C1 |
| Металлодетектор многозонный | 2022 |
|
RU2789988C1 |
| Многозонный металлообнаружитель | 2023 |
|
RU2796199C1 |
| СЕЛЕКТИВНЫЙ МЕТАЛЛОДЕТЕКТОР С ГАРМОНИЧЕСКИМ ВОЗБУЖДЕНИЕМ | 2004 |
|
RU2251125C1 |
| РУЧНОЙ ДЕТЕКТОР С БЕСПРОВОДНОЙ ПЕРЕДАЧЕЙ И ПРИЕМОМ ДАННЫХ | 2019 |
|
RU2714524C1 |
| СИСТЕМЫ ОБНАРУЖЕНИЯ | 2008 |
|
RU2460098C2 |
| Металлоискатель с бесконтактной связью с измерительным датчиком | 2023 |
|
RU2805004C1 |
Изобретение относится к устройствам обнаружения объектов из металла, проносимых проверяемыми лицами через контрольное пространство. Технический результат заключается в расширении технических возможностей многозонного металлообнаружителя при обнаружении объектов из металла в контрольном пространстве. Металлообнаружитель многозонный содержит передающие и приемные катушки, установленные с одной и другой стороны прохода, блок индикации и блок управления. Определение местоположения объекта из металла осуществляется путем последовательного включения каждой из передающих катушек для генерации электромагнитного поля в части контрольного пространства, обработки сигнала каждой приемной катушки, включающей определение наличия объекта из металла в каждой зоне обнаружения между передающей и приемной катушкой, вычисления местоположения объектов из металла в контрольном пространстве на основе данных о наличии объектов из металла в каждой зоне обнаружения. 1 ил.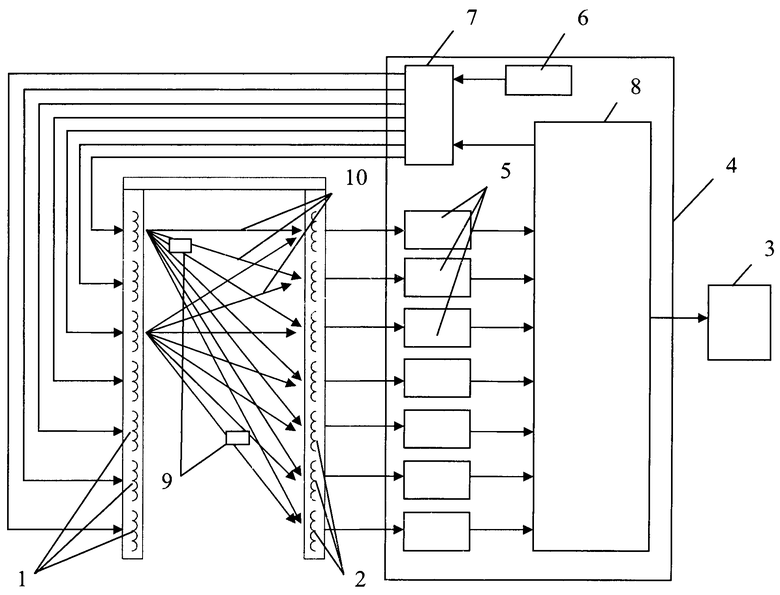
Металлообнаружитель многозонный, содержащий передающие катушки, установленные вертикально на одной стороне прохода, приемные катушки, установленные вертикально на другой стороне прохода, блок индикации, блок управления, соединенный с передающими и приемными катушками и генерирующий сигнал о наличии и местоположении объектов из металла в контрольном пространстве на блок индикации, отличающийся тем, что блок управления определяет местоположение объекта из металла путем последовательного включения каждой из передающих катушек для генерации электромагнитного поля в части контрольного пространства, одновременной при этом обработки сигнала каждой приемной катушки, включающей определение наличия объекта из металла в каждой зоне обнаружения между передающей и каждой приемной катушкой, вычисления местоположения объектов из металла в контрольном пространстве на основе данных о наличии объектов из металла в каждой зоне обнаружения.
| US 5680103 A1, 21.10.1997 | |||
| ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО, ПРЕЖДЕ ВСЕГО ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ МЕТАЛЛИЧЕСКИХ ПРЕДМЕТОВ | 2011 |
|
RU2595644C2 |
| ПЕРЕНОСНОЕ УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ПОДЗЕМНЫХ МЕТАЛЛИЧЕСКИХ ОБЪЕКТОВ И ОПРЕДЕЛЕНИЯ ИХ МЕСТОПОЛОЖЕНИЯ | 2002 |
|
RU2233460C1 |
| US 7671596 B2, 02.03.2010 | |||
| US 7759939 B2, 20.07.2010. | |||

