Изобретение предназначено для обнаружения металлических объектов как, например, огнестрельного или холодного оружия, их частей и осколочных материалов, скрытых под одеждой или в багаже в местах организованного прохода людей - таких как, например, вестибюли метро, вокзалы, аэропорты, стадионы и другие.
Известны аналоги - металлообнаружитель многозонный многочастотный с гармоническим возбуждением патент РФ на изобретение RU 2672162, металлообнаружитель многозонный патент РФ на изобретение RU 2643672, взятый за прототип, и металлообнаружитель многозонный патент РФ на изобретение RU 2680854. Как следует из описания изобретений, данные металлообнаружители используют комбинаторный метод вычисления местоположения металлического объекта в двумерной плоскости прохода, основанный на сопоставлении сработавших и несработавших локальных зон обнаружения, при этом каждая локальная зона обнаружения линейно аппроксимируется в виде луча. Общими недостатками данных аналогов является неспособность к достоверной локализации - способности металлодетектора указывать местоположение обнаруженных предметов - нескольких металлических объектов, одновременно или с небольшим интервалом времени перемещаемых через контрольное пространство, в силу очень большой нелинейности диаграммы направленности электромагнитного поля любой излучающей катушкой, сравнимой размерами с объектом поиска. Вследствие этого, такие металлообнаружители могут указывать место обнаружения лишь максимального по массе из двух и более металлических объектов, особенно если разница в массе между ними существенна и особенно, если объекты имеют существенную разницу в линейных размерах, сопоставимых с размерами катушек. Металлообнаружитель многозонный RU 2680854 использует одновременное включение нескольких пар передающих катушек. Вследствие этого, металлический объект, перемещаемый вблизи одной пары, будет давать ложные сработки в другой паре, включённой одновременной с ней. Кроме того, как следует из описания изобретений, использующих последовательное включение катушек - сигнал обнаружения в каждой локальной зоне пропускается через полосовые фильтры, которые выделяют основную гармонику рабочей частоты. Все полосовые фильтры имеют свою постоянную времени выхода на стабильный режим при переключении катушек, что приводит к необходимости выдержки времени включенного состояния локальной зоны равной, как минимум, 40-ка периодам рабочей частоты. При низкой рабочей частоте 0,5-4 кГц на полный опрос плоскости детектирования одного металлодетектора потребуется как минимум 80 миллисекунд, при возможном времени перемещения объекта поиска при стандартной пешеходной скорости человека, пересекающего металлодетектор глубиной 0,4 м, составляющем 288 миллисекунд. Таким образом, пока человек проходит через рамку - такой металлодетектор успеет провести лишь 3 полных цикла сканирования, что недостаточно для определения формы обнаруженных объектов поиска и корректировку чувствительности обнаружения в связи с той или иной формой. При увеличении же частоты работы, уменьшается глубина проникновения электромагнитного поля вглубь металлических объектов, что влечёт за собой ухудшение селективных свойств металлодетектора и к возможности его «обмануть», замаскировав объект поиска под несколькими слоями, например, медной или свинцовой фольги.
Также общим недостатком существующих на данный момент и применяющихся при антитеррористических мерах металлодетекторов является подверженность эффекту ориентации, при котором искажение электромагнитного поля, вызванное перемещением одного и того же плоского или вытянутого в длину объекта поиска, будет существенно разным при перемещении объекта через металлодетектор в трёх разных плоскостях. Вследствие того, что тревожная сработка металлодетектором создаётся именно на основе оценки амплитуды искажений электромагнитного поля, а фазовое искажение будет одно и то же для одного и того же объекта - то, чтобы гарантированно обнаруживать такие объекты поиска, приходится увеличивать чувствительность металлодетектора, что приводит к необходимости досматриваемым лицам выкладывать отдельно для осмотра телефоны, ключи, массивные часы и прочие предметы личного пользования. Данные недостатки ведут к ухудшению культуры досмотра, к снижению его скорости, к отсутствию возможности эксплуатации металлодетекторов без оператора в интегрированных системах безопасности и, как следствие - к снижению уровня антитеррористической безопасности.
Технической задачей изобретения является повышение достоверности локализации обнаружения многозонного металлодетектора при перемещении через контрольное пространство металлодетектора нескольких металлических объектов, в том числе и с существенной разницей в массе, в том числе и с существенной разницей в линейных размерах.
Технический результат предлагаемого изобретения заключается в возможности достоверной локализации обнаружения многозонного металлодетектора при перемещении через контрольное пространство металлодетектора нескольких металлических объектов, в том числе и с существенной разницей в массе, в том числе и с существенной разницей в линейных размерах - в создании трёхмерной карты расположения всех перемещаемых через металлодетектор металлических объектов с указанием их ориентации в контрольном объёме металлодетектора.
Решение технической задачи в способе обнаружения металлических объектов, включающем формирование электромагнитного поля в части контрольного пространства путём последовательного включения катушек и одновременной при этом обработки сигнала катушек с вычислением местоположения объектов из металла и подачей сигнала о наличии и местоположении объектов из металла в контрольном пространстве на блок индикации достигается тем, что в каждый момент времени в горизонтальной части контрольного пространства формируют двунаправленные несинфазные импульсы электромагнитного поля двумя независимыми, противоположно расположенными по обе стороны прохода катушками, с которых одновременно снимают приёмные сигналы, пропускают их через управляемые интеграторы, накапливают в сдвиговых регистрах и параллельно подают вместе с предыдущими текущему моменту отсчётами на нейросетевой вычислитель, который генерирует на блоке индикации трёхмерную карту расположения и ориентации обнаруженных металлических предметов, находящихся в текущий момент в контрольной зоне.
Решение технической задачи в устройстве для обнаружения металлических объектов - металлодетекторе многозонном, содержащем катушки, установленные вертикально с двух сторон прохода, блок управления, соединённый с катушками и генерирующий сигнал о наличии и местоположении объектов из металла в контрольном пространстве на блок индикации, включенный в блок управления, достигается тем, что все катушки с левой стороны прохода соединены одним концом и подключены этим концом к первому конденсатору, а вторым концом подключены независимо к своим электронным ключам, первые входы которых соединены и подключены к источнику питания постоянного тока, а вторые входы подключены независимо к блоку управления,
все выводы катушек с левой стороны прохода, соединенные с электронными ключами, соединены также с первым входом первого управляемого интегратора, выход которого подключен ко входу первого сдвигового регистра, выходы которого подключены независимо к первой группе входов нейросетевого вычислителя, причём второй вход первого управляемого интегратора подключен к блоку управления,
все катушки с правой стороны прохода соединены одним концом и подключены этим концом ко второму конденсатору, а вторым концом подключены независимо к своим электронным ключам, первые входы которых соединены и подключены к источнику питания постоянного тока, а вторые входы подключены независимо к блоку управления,
все выводы катушек с правой стороны прохода, соединенные с электронными ключами, соединены также с первым входом второго управляемого интегратора, выход которого подключен ко входу второго сдвигового регистра, выходы которого подключены независимо ко второй группе входов нейросетевого вычислителя, причём второй вход управляемого интегратора подключен к блоку управления,
а выход нейросетевого вычислителя подключен к микроконтроллеру, выход которого подключен ко входу блока индикации.
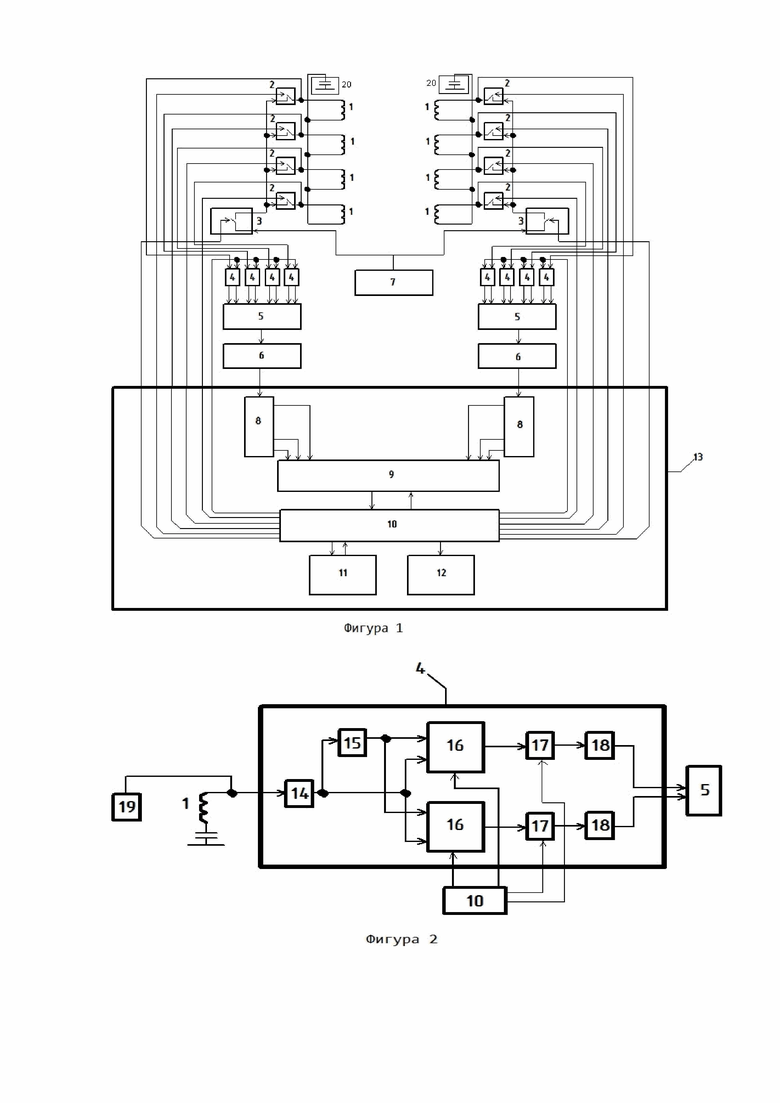
На фиг. 1 изображена схема металлообнаружителя, состоящего из
Катушек 1, электронных ключей 2 и электронных ключей 3, цепей управляемого интегрирования 4, мультиплексоров 5, аналого-цифровых преобразователей АЦП 6, источника питания постоянного тока 7, блока управления 13, содержащего сдвиговые регистры 8, нейросетевой вычислитель 9, микроконтроллер 10, дисплей с сенсорным управлением 11, тревожный извещатель 12, конденсаторы 20. Для исключения потери информативности, на фиг. 1 приведена схема с реализацией 4-х горизонтальных пар катушек, но предлагаемый металлодетектор может включать произвольное число таких пар.
На фиг. 2 изображена схема цепи управляемого интегрирования 4, состоящая из разделителя 14, инвертора 15, мультиплексоров 16, управляемого интегратора 17, усилителя постоянного напряжения 18. К цепи управляемого интегратора подключаются либо катушки 1, либо магниторезистивные датчики 19.
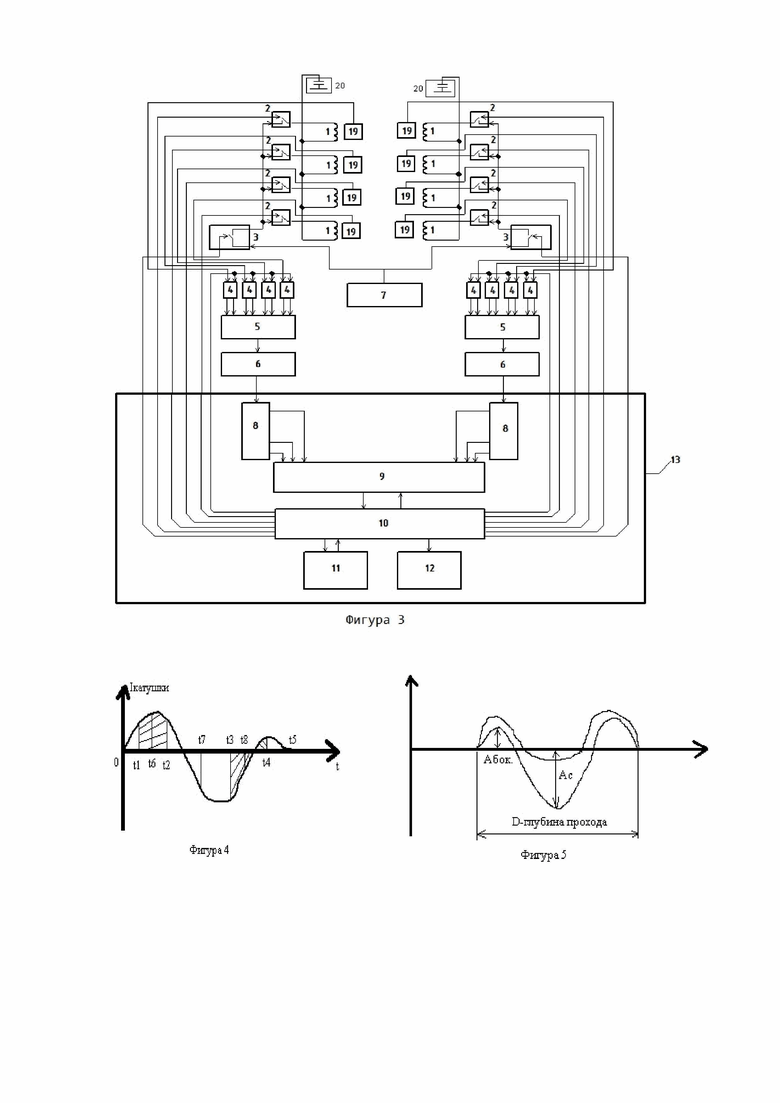
На фиг. 3 изображена схема металлобнаружителя, включающего в свой состав магниторезистивные датчики 19.
На фиг. 4 изображена временная развертка работы управляемого интегратора.
На фиг. 5 изображена временная развертка сигнала катушки при перемещении металлического объекта через контрольное пространство металлодетектора глубиной D.
Рассмотрим пример конкретной реализации металлодетектора, состоящего из двух вертикальных панелей, в которые устанавливаются катушки 1, соединённые с блоком управления, расположенного в перекладине, соединяющей панели или в одной из панелей.
Катушки 1 соединяются одним концом с конденсатором 20. Конденсатор 20 последовательно с включенной в текущий момент времени катушкой 1 образовывает последовательный колебательный контур, на который с помощью электронных ключей 2 и 3 подключено постоянное напряжение источника постоянного тока. Электронные ключи могут быть реализованы на MOSFET-транзисторах, обладающих достаточным быстродействием. Суммарное сопротивление открытого состояния ключей 2 и 3 выбирается таким образом, чтобы подача постоянного напряжения на колебательный контур приводила к апериодическому переходному процессу в катушке в виде быстрозатухающего импульса с длительностью равной два-четыре периода резонансной частоты колебательного контура. Таким образом, при резонансной частоте контура, равной 3 КГц, время, требуемое на включенное состояние одной катушки не превышает 1,25 миллисекунд при количестве периодов, равным 4, а полный цикл сканирования не превышает 10 миллисекунд, что позволяет за один проход человека через рамку металлодетектора произвести 20-30 циклов опроса сканирования, что напрямую связано с достижением технической задачи, как это будет показано далее. В то же время, колебательный контур обеспечивает такой характер изменения тока в катушках 1, электромагнитное поле которых воздействует на металлический объект поиска между катушками 1, при котором электромагнитное поле переизлучения, вызываемого объектом поиска, будет возникать преимущественно на основной гармонике, равной резонансной частоте колебательного контура, а не в широкой полосе частот, что напрямую связано с достижением технической задачи, как это будет показано далее. В соответствии со схемой металлодетектора, приёмный тракт подключен к тем же катушкам 1, которые и формируют электромагнитное поле. Приёмный тракт включает разделитель 14, исключающий выход из строя низковольтовой электроники приёмного тракта, который смещает постоянное напряжение на катушке в область низких напряжений, инвертор 15, мультиплексоры 16 и управляемые интеграторы 17. Разделитель может быть реализован на высоковольтном операционном усилителе в дифференциальном включении. Инвертор 15 предназначен для смещения выходного напряжения управляемого интегратора в область положительных напряжений, в случае, если будет применена однополярная схема питания приёмного тракта. Управляемые интеграторы представляют собой интегрирующие цепочки, имеющие возможность мгновенной принудительной установки начального состояния в ноль в любой момент времени. Такие интеграторы могут быть реализованы в виде простейшей RC-цепи, конденсатор которой шунтирован MOSFET-транзистором с низким сопротивлением канала, мгновенно разряжающим конденсатор в нужный момент времени. Выходы управляемых интеграторов подключены к усилителям постоянного напряжения 18, которые усиливают разницу между выходами интеграторов и постоянным напряжением смещения (на схеме Фиг. 2 подача напряжения смещения не показана чтобы не перегружать её информативность). Выход усилителей постоянного напряжения подключены через аналого-цифровой преобразователь (АЦП) 5 ко входам сдвиговых регистров 8, которые содержат все отсчёты приёмного сигнала за прошедшее время Т, которое выбирается исходя из минимально возможной скорости прохода через металлодетектор, а размер сдвигового регистра определяется длиной цикла опроса всех катушек t и временем Т. Так, при длительности цикла опроса 10 миллисекунд и при максимальной длительности прохода равной 3 секунды (очень медленное передвижение через рамку металлодетектора) длина регистров 8 будет равна N=(T/t)=300 отсчётов на каждый из 4-х временных интервалов одной катушки 1.
Все выходы сдвиговых регистров 8 параллельно подключены к нейросетевому вычислителю 9, который подключен к микроконтроллеру 10, подключенный к дисплею 11 и тревожному извещателю 12. Нейросетевой вычислитель может быть выполнен на базе так называемой системы-на-кристалле - СнК, включающей в одной микросхеме как аппаратные, так и программные вычислительные средства, оптимизированные под нейросетевую реализацию. Возможным примером такой СнК - платформа Zynq UltraScale+ производства Xilinx. Тревожный извещатель 12 включает в свой состав звуковой извещатель и индикаторные полоски, указывающие местоположение обнаруженные объектов на торцевых частях боковых панелей металлодетектора по всей высоте панелей.
Рассмотрим пример реализации способа обнаружения металлических предметов. Металлодетектор в примере конкретной реализации используется для проверки наличия огнестрельного и холодного оружия, а также их металлических частей и осколочных материалов под одеждой или в багаже.
В нулевой момент времени включаются электронные ключи 2 верхней левой и верхней правой катушек 1, остальные электронные ключи 2 выключены. После чего кратковременно 1-3 раза включается левый электронный ключ 3 с периодом резонансной частоты колебательного контура, образованного левой катушкой 1 и левым конденсатором 20 и правый электронный ключ 3 с периодом резонансной частоты колебательного контура, образованного правой катушкой 1 и правым конденсатором 20. Резонансные частоты колебательных контуров выбираются близкими, но не равными, что приводит к наложению апериодических импульсов, как от катушек, так и импульсов переизлучения объектами поиска. Апериодические импульсы выделяются теми же катушками 1. Включение левых и правых электронных ключей 3 производится в противофазе, что обуславливает слабое влияние правой катушки 1 на приёмную цепь сигнала левой катушки 1, если считывание приёмного сигнала левой катушки 1 производится в момент времени, когда правый ключ 3 выключен и наоборот. Применение двунаправленных катушек позволяет сформировать двунаправленное несинфазное импульсное электромагнитное поле в локальной горизонтальной части контрольного объёма, что делает возможным локализацию объектов поиска вблизи любой катушки независимо от того, есть ли другие объекты поиска возле противоположной катушки или нет, что, в свою очередь, исключает необходимость применения комбинаторных сопоставлений сработавших локальных зон.
Таким образом, искажения сигнала, вносимые металлическими объектами, помещёнными между данными конкретными левой и правой катушками 1, считываемого с левой катушки 1 в момент времени, когда левый электронный ключ включен, характеризуют наличие металлического объекта в ближней к левой катушке зоне, а искажения сигнала, считываемого с правой катушки 1 в момент времени, когда правый электронный ключ включен, характеризуют наличие металлического объекта в ближней к правой катушке зоне. В то же время, сумма искажений сигнала левой катушки 1 в момент времени, когда левый электронный ключ 3 выключен и правой катушки 1 в момент времени, когда правый электронный ключ 3 выключен, несет информацию о суммарной массе металла между этими двумя конкретными катушками. Далее оценка энергии искажения приёмных сигналов производится в управляемых интеграторах. На фигуре 4 показана временная развертка одного импульса сигнала, снимаемого с одной из двух катушек 1, включенных в текущий момент времени. Интервалы времени t1-t2 и t6-t7 находятся в области включенного электронного ключа 3. Интервалы времени t3-t4 и t8-t5 находятся в области выключенного электронного ключа 3. Длительность импульса составляет t5<=1,25 миллисекунд. В момент времени t1 первый управляемый интегратор 17 приводится принудительно в нулевое состояние, а в момент времени t2 он содержит энергию импульса в временном диапазоне t1-t2, после чего сигнал интегратора оцифровывается и запоминается в сдвиговом регистре. В момент времени t6 второй управляемый интегратор принудительно приводится в нулевое состояние, а в момент времени t7 он содержит энергию импульса в временном диапазоне t6-t7, после чего сигнал второго интегратора оцифровывается и запоминается в сдвиговом регистре. Аналогичным образом сигнал вырезается и интегрируется во временных диапазонах t3-t4 и t8-t5 соответственно. В совокупности, энергии сигналов на указанных промежутках в виде множеств LEFT={At12, At67, At34, At85} левой катушки и RIGHT={At12, At67, At34, At85} несут полную информацию о массе металла вблизи левой катушки, о массе металла вблизи правой катушки и о суммарной массе металла между правой и левой катушками. Соотношения At12 и At67, At34 и At85 соответствуют конкретному металлу или сплаву, из которого сделаны металлические объекты, что достигается лишь в случае существенного преобладания в сигнале переизлучения металлического объекта одной частотной гармоники, что обусловлено применением конденсаторов 20 в резонансной цепи. В случае широкополосного прямоугольного или трапецеидального импульса пришлось бы производить фазовый частотный анализ посредством преобразования Фурье, что повлекло бы дополнительное время на обработку сигнала и дополнительные вычислительные мощности.
После этого производится аналогичный порядок действий со следующей горизонтальной парой из левой и правой катушек 1. Таким образом, применение управляемого интегратора позволяет оценить искажения электромагнитных импульсов, вносимые металлическими объектами, за интервал времени не более 1,25 миллисекунд на катушку. При числе катушек - по 8 катушек с каждой стороны прохода, цикл опроса будет занимать не более 10 миллисекунд, что означает, что за время прохода досматриваемого лица через рамку металлодетектора, алгоритмом его работы предусмотрено не менее, чем 20 циклов сканирования при очень быстрой скорости прохода и не менее, чем 300 циклов при очень медленной скорости прохода.
Выходы сдвиговых регистров содержат все отсчеты сигналов катушки, предшествующие текущему моменты времени с интервалом в 1 полный цикл сканирования, а форма сигнала, образованная всеми отсчётами, несёт информацию о геометрической форме металлического объекта. На фиг. 5 приведены эпюры временной развертки формы изменения сигнала одной из катушек 1, вызванные одним и тем же объектом - металлическим ножом. Верхняя эпюра показывает форму сигнала при перемещении ножа вертикально, например, в ножнах, спрятанных на ноге злоумышленника под брюками. Нижняя эпюра показывает форму сигнала при перемещении ножа горизонтально и соосно направлению перемещения, например, в чемодане, находящемся в руках. Как видно из эпюр - соотношения энергии сигнала в боковых лепестках эпюры и в центральной её части различаются для каждой ориентации объекта поиска. Таким образом, анализ формы сигнала, получаемого со сдвиговых регистров, позволяет оценить направление перемещения и ориентацию объектов поиска с существенной разницей в линейных размерах и отобразить расположение объекта поиска на трёхмерной карте обнаруженных объектов. Достоверный анализ формы возможен лишь при количестве точек, составляющих эпюру, не менее 15-ти точек, поэтому задача достоверной 3-х мерной локализации объектов поиска решаема лишь при очень быстром полном цикле опроса, что, в свою очередь, решается применением управляемого интегратора.
После того, как был произведён полный цикл опроса катушек, данные со сдвиговых регистров поступают в предварительно обученный нейросетевой вычислитель. Применение нейросетевого вычислителя обусловлено следующими причинами. Энергии сигналов LEFT={At12, At67, At34, At85} левой катушки и RIGHT={At12, At67, At34, At85} правой катушки несут полную информацию о массе металлических объектов поиска, их геометрии и взаимного расположения между правой и левой катушками. Однако, задача локализации обнаружения объектов поиска, тождественно равная задаче определения координат объектов поиска в трёхмерном объёме контрольного пространства, сводится к решению системы нелинейных уравнений 3-го порядка, что было рассмотрено, к примеру, в описании к патенту US00568O103A, с бесконечным множеством краевых условий, зависящих от количества объектов, от их формы, массы, типа металла, скорости перемещения через металлодетектор, от порядка поступления в металлодетектор. Например, один объект поиска может быть спрятан на спине, а второй - в носке ботинка досматриваемого субъекта и объект, расположенный в носке ботинка попадает в металлодетектор первым, а расположенный на спине - через некоторый промежуток времени, что вызывает изменения каждого из значений LEFT={At12, At67, At34, At85} и RIGHT={At12, At67, At34, At85} в каждый текущий момент времени. Кроме того, в носке ботинка объект поиска перемещается через металлодетектор по сложной траектории, что накладывает свой отпечаток на множества LEFT и RIGHT. Единой формулы решения такой системы нелинейных уравнений даже для ограниченного количества краевых условий не существует, а аппроксимация решения с использованием базового набора объектов обнаружения и комбинаторного сопоставления их откликов неизбежно приводит к тому, что чувствительность металлодетектора приходится увеличивать, чтобы не пропустить какую-нибудь непроверенную и неучтённую в аппроксимационной формуле комбинацию объектов поиска, что приводит к снижению культуры досмотра и сводит на нет основное преимущество многозонных металлодетекторов в виде локализации объектов обнаружения. Между тем, корреляция значений LEFT={At12, At67, At34, At85}, RIGHT={At12, At67, At34, At85} и комбинации объектов поиска, вызвавшей такие значения, с учётом массы, размеров и геометрического взаиморасположения объектов поиска близка к 100%. Наличие двух разных комбинаций объектов поиска, вызывающих схожее искажение сигналов LEFT={At12, At67, At34, At85} и RIGHT={At12, At67, At34, At85} не представляется возможным. А применение современных обучаемых нейросетевых вычислителей даёт устойчивые, достоверные результаты в большом кластере задач корреляционного поиска речевых фраз, фрагментов фото и видео, задач классификации и группировки объектов. С применением нейросетевых вычислителей становится возможным достоверное решение поставленной перед вычислителем задачи на всём множестве возможных комбинаций входных сигналов. При этом, для обучения вычислителя используется лишь конечный, ограниченный набор стимулирующих данных, которого, тем не менее, достаточно для создания во внутренней структуре нейросетевого вычислителя необходимых наборов корреляционных функций, решающих задачу на всём множестве входных данных.
Как было описано выше - решаемая настоящим изобретением задача относится к тому же кластеру задач. Есть бесконечное число комбинаций множеств входных данных LEFT={At12, At67, At34, At85} и RIGHT={At12, At67, At34, At85}, которым нужно поставить в соответствие комбинацию объектов поиска, вызвавшую такие данные. Обучение нейросетевого вычислителя производится лишь на ограниченном множестве комбинаций объектов поиска. На практике - это несколько десятков-сотен проходов с разным набором металлических предметов через металлодетектор с передачей в нейровычислитель на этапе обучения трёхмерной координатной сетки с указанием точек перемещения металлических предметов, их массы, типа металла и ориентации в контрольном объёме после каждого прохода. После обучения внутренняя структура обученного нейросетевого вычислителя может быть считана и тиражирована в серийно выпускаемых изделиях.
После того, как множество входных данных LEFT={At12, At67, At34, At85} и RIGHT={At12, At67, At34, At85} для каждой горизонтальной пары катушек 1 за заданный промежуток времени с выходов сдвиговых регистров 8 поступает в нейросетевой вычислитель 9, на выходе вычислителя образуется трехмерная карта обнаруженных объектов поиска с указанием их ориентации в контрольном объёме, массогабаритных параметров и типа металла, которая считывается микроконтроллером 10 и затем выводится на дисплей 11. Одновременно с этим, в случае если объекты поиска были расценены как опасные, в соответствии с настройками пользователя, микроконтроллер 10 подаёт сигнал звуковой и световой индикации на тревожный извещатель 12.
В целях дополнительного повышения достоверности локализации, возможен вариант реализации устройства металлодетектора с дополнительным применением магниторезистивных датчиков 19, устанавливаемых рядом или в центре катушек 1, как это показано на Фиг. 3. Поскольку магниторезистивные датчики аналогичным катушке образом регистрируют переменное электромагнитное поле и кроме того обладают большой чувствительностью к изменению постоянного магнитного поля Земли, их применение позволит достоверно локализовывать даже такие мелкие металлические объекты, как лезвия бритв, которые катушками зарегистрировать не представляется возможным. Кроме того, для магниторезистивных датчиков характерно наличие одного или двух независимых осевых направлений регистрируемых силовых линий магнитного поля. Это, в свою очередь, обуславливает то, что постоянный уровень выходного сигнала магниторезистивного датчика будет зависеть от ориентации металлического объекта по отношению к магнитному полю Земли - т.е. характеризовать угол наклона объекта по отношению к каждой оси датчика, что повышает достоверность отображения ориентации объекта на трехмерной карте, решая поставленную техническую задачу.
Таким образом, технический результат изобретения в способе обнаружения металлических объектов достигается благодаря тому, что
• Одновременно формируют двунаправленные импульсы электромагнитного поля двумя независимыми, противоположно расположенными по обе стороны прохода катушками, образующими в текущий момент времени локальную горизонтальную зону обнаружения;
• с тех же катушек одновременно снимают и приёмные сигналы, что позволяет получить набор данных, находящихся в высокой корреляционной взаимосвязи с комбинацией объектов поиска, образовавшей такие данные;
• пропускают их через управляемые интеграторы, позволяющие за короткий интервал времени измерить энергию приёмного сигнала в выделенном временном домене;
• накапливают сигналы в сдвиговых регистрах, формируя количество выборок, достаточных для построения эпюр изменения приёмных сигналов при перемещении объекта поиска через контрольный объём, что позволяет установить ориентацию объектов поиска в контрольном объёме;
• параллельно подают вместе с предыдущими текущему моменту отсчётами на нейросетевой вычислитель, который генерирует на блоке индикации трёхмерную карту расположения и ориентации обнаруженных металлических предметов, находящихся в текущий момент в контрольной зоне;
Технический результат изобретения в устройстве для обнаружения металлических предметов достигается благодаря тому, что
• все катушки с левой стороны прохода соединены одним концом и подключены этим концом к первому конденсатору, а вторым концом подключены независимо к своим электронным ключам, первые входы которых соединены и подключены к источнику питания постоянного тока, а вторые входы подключены независимо к блоку управления;
• все выводы катушек с левой стороны прохода, соединённые с электронными ключами, соединены также с первым входом первого управляемого интегратора, выход которого подключен ко входу первого сдвигового регистра, выходы которого подключены независимо к первой группе входов нейросетевого вычислителя, причём второй вход первого управляемого интегратора подключен к блоку управления;
• все катушки с правой стороны прохода соединены одним концом и подключены этим концом ко второму конденсатору, а вторым концом подключены независимо к своим электронным ключам, первые входы которых соединены и подключены к источнику питания постоянного тока, а вторые входы подключены независимо к блоку управления;
• все выводы катушек с правой стороны прохода, соединенные с электронными ключами, соединены также с первым входом второго управляемого интегратора, выход которого подключен ко входу второго сдвигового регистра, выходы которого подключены независимо ко второй группе входов нейросетевого вычислителя, причём второй вход управляемого интегратора подключен к блоку управления;
• выход нейросетевого вычислителя подключен к микроконтроллеру, выход которого подключен ко входу блока индикации;
• дополнительно к катушкам, могут быть установлены магниторезистивные датчики, выходы которых подключены к управляемому интегратору.
| название | год | авторы | номер документа |
|---|---|---|---|
| СЕЛЕКТИВНЫЙ МЕТАЛЛОДЕТЕКТОР С ГАРМОНИЧЕСКИМ ВОЗБУЖДЕНИЕМ | 2004 |
|
RU2251125C1 |
| Металлообнаружитель многозонный | 2017 |
|
RU2643672C1 |
| МЕТАЛЛООБНАРУЖИТЕЛЬ МНОГОЗОННЫЙ МНОГОЧАСТОТНЫЙ С ГАРМОНИЧЕСКИМ ВОЗБУЖДЕНИЕМ | 2018 |
|
RU2672162C1 |
| МЕТАЛЛООБНАРУЖИТЕЛЬ МНОГОЗОННЫЙ | 2018 |
|
RU2680854C1 |
| АМПЛИТУДНО-ФАЗОВЫЙ СПОСОБ ОБНАРУЖЕНИЯ МЕТАЛЛОСОДЕРЖАЩИХ ОБЪЕКТОВ И РАДИОЧАСТОТНЫЙ ИЛИ СВЧ-МЕТАЛЛОДЕТЕКТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2276391C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ЯДЕРНЫХ МАТЕРИАЛОВ И РАДИОАКТИВНЫХ ВЕЩЕСТВ | 2008 |
|
RU2364890C1 |
| СПОСОБ ОБНАРУЖЕНИЯ МЕТАЛЛИЧЕСКИХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ - МЕТАЛЛООБНАРУЖИТЕЛЬ | 2017 |
|
RU2671914C1 |
| МЕТАЛЛОДЕТЕКТОР С ПРОСТРАНСТВЕННЫМ РАЗРЕШЕНИЕМ | 2015 |
|
RU2702912C2 |
| МЕТАЛЛОДЕТЕКТОР | 2001 |
|
RU2237255C2 |
| УЛУЧШЕННОЕ СРЕДСТВО МЕТАЛЛОБНАРУЖЕНИЯ ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ МЕТАЛЛИЧЕСКИХ ОБЪЕКТОВ | 2020 |
|
RU2789658C1 |
Изобретение предназначено для обнаружения металлических объектов, например огнестрельного или холодного оружия, их частей и осколочных материалов, скрытых под одеждой или в багаже в местах организованного прохода людей. Технический результат: повышение достоверности локализации обнаруженных металлических предметов, в том числе при обнаружении нескольких металлических предметов одновременно и с существенной разницей в массе и в геометрической форме. Сущность: в каждый момент времени в горизонтальной части контрольного пространства формируют двунаправленные несинфазные импульсы электромагнитного поля двумя независимыми противоположно расположенными по обе стороны прохода катушками, с которых одновременно снимают приёмные сигналы. Пропускают сигналы через управляемые интеграторы, накапливают в сдвиговых регистрах и параллельно подают вместе с предыдущими текущему моменту отсчётами на нейросетевой вычислитель. Нейросетевой вычислитель генерирует на блоке индикации трёхмерную карту расположения и ориентации обнаруженных металлических предметов, находящихся в текущий момент в контрольной зоне. Металлодетектор содержит катушки, установленные вертикально с двух сторон прохода, блок управления, соединенный с катушками. Вторые выводы катушек подключены к цепям управляемого интегрирования. Блок управления содержит микроконтроллер, сдвиговые регистры, нейросетевой вычислитель, блок индикации. 2 н. и 1 з.п. ф-лы, 5 ил.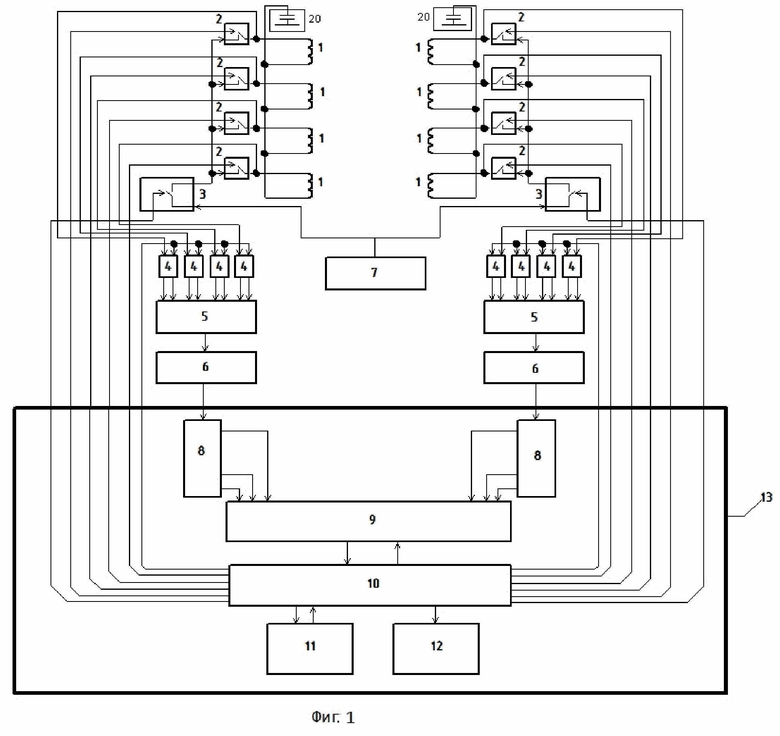
1. Способ обнаружения металлических объектов, включающий формирование электромагнитного поля в части контрольного пространства путем последовательного включения катушек и одновременной при этом обработки сигнала катушек с вычислением местоположения объектов из металла и подачей сигнала о наличии и местоположении объектов из металла в контрольном пространстве на блок индикации, отличающийся тем, что в каждый момент времени в горизонтальной части контрольного пространства формируют двунаправленные несинфазные импульсы электромагнитного поля двумя независимыми, противоположно расположенными по обе стороны прохода катушками, с которых одновременно снимают приемные сигналы, пропускают их через управляемые интеграторы, накапливают в сдвиговых регистрах и параллельно подают вместе с предыдущими текущему моменту отсчетами на нейросетевой вычислитель, который затем генерирует на блоке индикации трехмерную карту расположения и ориентации обнаруженных металлических предметов, находящихся в текущий момент в контрольном объеме.
2. Устройство для обнаружения металлических объектов - металлодетектор многозонный, содержащий катушки, установленные вертикально с двух сторон прохода, блок управления, соединенный с катушками и генерирующий сигнал о наличии и местоположении объектов из металла в контрольном пространстве на блок индикации, включенный в блок управления, отличающийся тем, что
блок управления дополнительно содержит микроконтроллер, сдвиговые регистры и нейросетевой вычислитель,
а вторые выводы катушек подключены к цепям управляемого интегрирования, каждые из которых содержат
разделитель,
инвертор, к входу которого подключен выход разделителя,
первый и второй мультиплексоры цепи управляемого интегрирования, первые входы которых подключены к выходу разделителя, вторые входы подключены к выходу инвертора, а третьи входы подключены независимо к микроконтроллеру блока управления,
первый и второй управляемые интеграторы, первые входы которых подключены к выходам первого и второго мультиплексоров цепи управляемого интегрирования, соответственно, а вторые входы подключены независимо к микроконтроллеру блока управления, а также
первый и второй усилители постоянного напряжения, входы которых подключены к выходам первого и второго управляемых интеграторов соответственно,
при этом все катушки с левой стороны прохода соединены первым выводом и подключены этим выводом к первому конденсатору, а вторым выводом подключены независимо к выходам собственных электронных ключей, первые входы которых соединены и подключены к источнику питания постоянного тока, а вторые входы подключены независимо к микроконтроллеру блока управления,
а все катушки с правой стороны прохода соединены первым выводом и подключены этим выводом ко второму конденсатору, а вторым выводом подключены независимо к выходам собственных электронных ключей, первые входы которых соединены и подключены к источнику питания постоянного тока, а вторые входы подключены независимо к микроконтроллеру блока управления,
при этом каждый вывод катушек с левой стороны прохода, соединенный с электронным ключом, независимо подключен к входу разделителя собственной цепи управляемого интегрирования, а все выходы усилителей постоянного напряжения собственных цепей управляемого интегрирования подключены независимо к входам первого мультиплексора,
а каждый вывод катушек с правой стороны прохода, соединенный с электронным ключом, независимо подключен к входу разделителя собственной цепи управляемого интегрирования, а все выходы усилителей постоянного напряжения собственных цепей управляемого интегрирования подключены независимо к входам второго мультиплексора,
при этом выходы первого и второго мультиплексоров подключены к входам первого и второго аналого-цифровых преобразователей соответственно, а выходы первого и второго аналого-цифровых преобразователей подключены к входам первого и второго сдвиговых регистров блока управления соответственно, а выходы первого и второго сдвиговых регистров подключены к входам нейросетевого вычислителя блока управления, выход которого подключен к микроконтроллеру блока управления, выход которого подключен к блоку индикации.
3. Металлодетектор многозонный селективный по п.2, отличающийся тем, что устройство содержит магниторезистивные датчики, расположенные вертикально с каждой стороны прохода, подключенные независимо к входам разделителей собственных цепей управляемого интегрирования.
| Металлообнаружитель многозонный | 2017 |
|
RU2643672C1 |
| МЕТАЛЛООБНАРУЖИТЕЛЬ МНОГОЗОННЫЙ МНОГОЧАСТОТНЫЙ С ГАРМОНИЧЕСКИМ ВОЗБУЖДЕНИЕМ | 2018 |
|
RU2672162C1 |
| МЕТАЛЛООБНАРУЖИТЕЛЬ МНОГОЗОННЫЙ | 2018 |
|
RU2680854C1 |
| CN 111580171 A, 25.08.2020 | |||
| CN 111580172 A, 25.08.2020 | |||
| US 2008054893 A1, 06.03.2008. | |||

