Изобретение относится к устройствам обнаружения объектов из металла, используемым при досмотровых операциях в местах организованного прохода людей.
Известен патент RU 49287U1, опубликован 10.11.2005 г., «Металлообнаружитель». Металлообнаружитель выполнен в виде двух вертикальных стоек, внутри которых установлены две намагничивающие катушки и две приемные катушки, причем намагничивающие катушки соединены между собой последовательно и подключены к генератору, а две приемные катушки, соединены между собой последовательно и подключены к усилителю, выход которого подключен к первому входу синхронного детектора, выход которого соединен со входом анализатора, выход которого соединен со входом блока индикации, устройство управления, первый выход которого соединен со входом генератора, а второй выход соединен со вторым входом синхронного детектора, дополнительно намагничивающие катушка установлены ортогонально в центре одной из стоек, при этом одна из намагничивающих катушек установлена вертикально, а вторая горизонтально перпендикулярно плоскости зоны контроля и приемные катушки установлены симметрично горизонтально и встречно в другой стойке, причем расстояние между приемными катушками выбирается в зависимости от ширины зоны контроля. Недостатком данного металлообнаружителя является отсутствие многозонности.
Известен патент RU 2251125С1, опубликован 27.04.2005 г., «Селективный металлодетектор с гармоническим возбуждением». Селективный металлодетектор содержит две приемные катушки, фазовращатель, передающую катушку, генератор, синхронные детекторы, вычислительный блок и блок индикации. Вычислительный блок выполнен в виде процессора, а генератор выполнен в виде преобразователя. Недостатком данного металлообнаружителя является отсутствие многозонности.
Известен патент US 5680103(A) взятый за прототип, опубликован 21.10.1997 г, «Metal detection system» («Система обнаружения металла»). Система обнаружения металла содержащая: генератор, катушку генерации поля, соединенную и возбуждаемую генератором, для генерирования электромагнитного поля равномерной плотности, которое нарушается при наличии в нем металлических предметов, множество первых приемных катушек, установленных вертикально на одной стороне прохода, множество вторых приемных катушек, установленных вертикально на другой стороне прохода, каждая из приемных катушек соединена с отдельной цепью детектора, каждый детектор включает средство для обнаружения нарушения электромагнитного поля, принимаемого соответствующей приемной катушкой, и выдачи сигнала обнаружения; обработка выходных сигналов обнаружения от цепей детектора для генерации сигнала положения, указывающего приближенное горизонтальное и вертикальное расположение каждого отдельного объекта из металла и сигнала о массе объекта; средство для сравнения каждого сигнала с пороговым значением и средство для вывода индикации тревоги.
Известны статьи,
1) Березанский Д.П. «Металлодетекторы - обнаружители оружия. Обзор принципов действия». Специальная техника, 1998, №4-5.
2) Синелыциков Г.А. «Зарубежные арочные металлодетекторы: осознанный выбор». Специальная техника, 1999, №1-2.
Техническая задача заключается в расширении арсенала технических средств того же назначения, создание многозонного металлообнаружителя, способного определять местоположение объектов из металла в контрольном пространстве регулируемой пользователем ширины.
Техническая задача в металлообнаружителе многозонном, содержащем передающие катушки, установленные вертикально на одной стороне прохода, приемные катушки, установленные вертикально на другой стороне прохода, блок индикации, блок управления, соединенный с передающими и приемными катушками и генерирующий сигнал о наличии и местоположении объектов из металла в контрольном пространстве на блок индикации достигается тем, что блок управления определяет геометрическое местоположение объекта из металла путем деления контрольного пространства на две и более независимых друг от друга локальных зоны обнаружения и вычисления местоположения объектов из металла в контрольном пространстве на основе данных о наличии объектов из металла в каждой такой локальной зоне обнаружения, причем локальные зоны обнаружения создаются параллельным одновременным возбуждением каждой передающей катушки гармоническим сигналом синусоидальной формы заданной частоты, при этом для каждой передающей катушки устанавливается своя собственная частота сигнала, с одновременной параллельной обработкой сигнала каждой приемной катушки, фильтрацией и выделением в ней амплитуды и фазы сигналов частот, наведенных каждой из передающих катушек, включающей определение наличия объекта из металла в каждой локальной зоне обнаружения между передающей и каждой приемной катушкой.
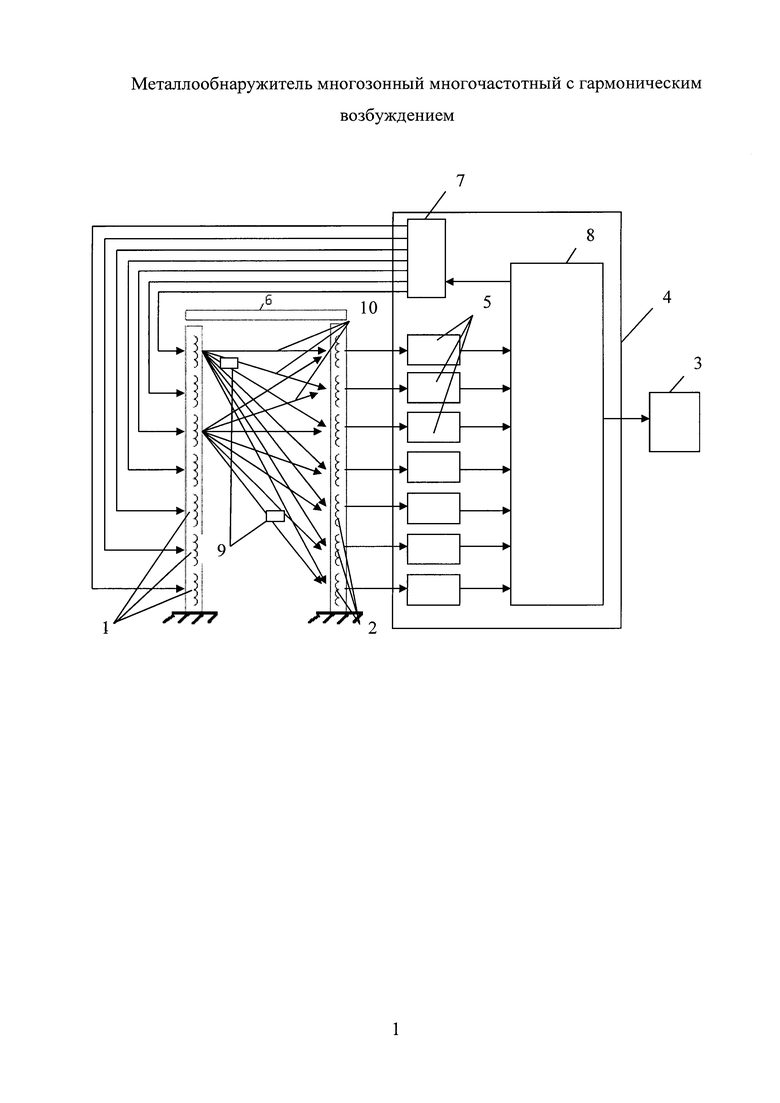
На чертеже изображена общая схема многозонного металлообнаружителя.
Металлообнаружитель содержит передающие катушки 1, приемные катушки 2, блок индикации 3, соединенные с блоком управления 4. Металлообнаружитель может устанавливаться как с перекладиной 6 для придания жесткости конструкции, так и устанавливаться без перекладины в случае необходимости оперативной регулировки ширины прохода путем изменения расстояния между передающими и приемными катушками в пределах 0,6-2.1 метра.
Передающие катушки 1 и приемные катушки 2 установлены вертикально с одной и другой стороны прохода и образуют контрольное пространство. Каждая из передающих 1 и приемных 2 катушек может быть выполнена в виде двух круглых катушек, соединенных последовательно как в противофазе, что позволяет повысить защищенность приемных сигналов от внешних помех и подавить электромагнитное влияние металлообнаружителя на возможные располагающиеся в непосредственной близости от металлобнаружителя электронные устройства, так и синфазно, для увеличения чувствительности обнаружения. Каждая передающая катушка 1 при включении формирует электромагнитное поле в части контрольного пространства, при этом вектор электромагнитного поля будет направлен от передающей катушки 1 к приемным катушкам 2. Таким образом, каждая передающая катушка 1 и каждая приемная катушка 2 образуют между собой локальную зону обнаружения 10 (на чертеже показано схематично). Локальная зона обнаружения 10 физически подобна лучу проходящему от каждой передающей катушки 1 к каждой приемной катушке 2, при этом ширина луча аппроксимируется и равна ширине катушек. При этом локальные зоны обнаружения каждой из передающих катушек не зависимы от локальных зон обнаружения других передающих катушек вследствие того, что каждая передающая катушка излучает на своей собственной, отличной от других передающих катушках, частоте.
Блок индикации 3 может быть выполнен в виде светодиодной панели или жидкокристаллического дисплея и дополнен устройством звукового оповещения, и предназначен для отображения и звукового оповещения сигнала о наличии и местоположении объектов из металла в контрольном пространстве. Блок индикации 3 может быть установлен в панели металлообнаружителя, в перекладине 6, соединяющей панели металлообнаружителя в арочную конструкцию, а также может быть вынесен удаленно каким-либо из проводных интерфейсов.
Блок управления 4 выполнен на базе программируемой логической интегральной схемы (ПЛИС). ПЛИС позволяет производить параллельную многоканальную цифровую и математическую обработку сигналов, при этом электрическая принципиальная схема разрабатывается в отладочной среде или программированием на специальных языках программирования, например Verilog, VHDL, AHDL - языки описания аппаратуры интегральных схем. Такая программа компилируется и прошивается в ПЛИС, в результате чего ПЛИС становится электронным цифровым устройством с определенным программой функционалом.
Блок управления 4 содержит генератор 7, выходы которого соединены с передающими катушками 1; цепи детектирования 5 сигнала каждой приемной катушки 2; модуль управления 8 принимающий сигналы от цепей детектирования 5 и соединенный с генератором 7 для управления.
Генератор 7 обеспечивает одновременное параллельное возбуждение передающих катушек сигналом синусоидальной формы собственной, для каждой передающей катушки, частоты.
Каждая приемная катушка 2 соединена с соответствующей цепью детектирования 5, для обработки сигнала приемной катушки. Цепь детектирования 5 состоит из последовательно соединенных первого усилителя, сумматора, аналого-цифрового преобразователя, второго усилителя, полосовых фильтров (количество устанавливается равным количеству передающих катушек и, соответственно, количеству используемых частот), узлов свертки (количество устанавливается равным количеству передающих катушек и, соответственно, количеству используемых частот), интегратора, пикового детектора, дополнительно опорный сигнал подается на узлы свертки и через цифро-аналоговый преобразователь на сумматор (не показаны). Выше рассмотрен один из примеров реализации цепи детектирования, позволяющей выделить отклонение амплитудной и фазовой составляющей для каждой из используемых частот в сигнале приемной катушки 2, возникающей при нахождении объекта из металла 9 в локальной зоне обнаружения 10. Анализ значения амплитудной и фазовой составляющей сигнала и отношения их значений позволяет определить тип металла, из которого сделаны объекты, находящиеся в контрольной зоне, определить массу или объем металла, а так же обеспечить селективность обнаружения по массе или по типу металла, то есть обеспечить «не обнаружение» заданных объектов, например личных вещей из металла, телефонов, ключей и др. Таким образом, каждая цепь детектирования 5 выдает сигнал о нахождении объекта из металла в соответствующей локальной зоне обнаружения 10 между соответствующей передающей и приемной катушкой.
Модуль управления 8 принимает и обрабатывает сигналы с цепей детектирования 5, вычисляет местоположение объектов из металла в контрольном пространстве, передает сигналы о наличии и местоположении объектов из металла в контрольном пространстве на блок индикации 3.
Металлообнаружитель многозонный работает следующим образом.
Блок управления 4 осуществляет одновременное параллельное возбуждение передающих катушек, при этом модуль управления 8 подает сигнал управления генератору 7, который возбуждает каждую передающую катушку собственной частотой.
Каждая передающая катушка 1 генерирует электромагнитное поле синусоидальной формы собственной частоты в части контрольного пространства металлообнаружителя. Наведенный электродвижущей силой (ЭДС) сигнал в каждой приемной катушке 2, представляющий собой сумму синусоидальных сигналов используемых частот, поступает на вход соответствующей цепи детектора 5, где усиливается первым усилителем, складывается в сумматоре с сигналом компенсации, сформированным ЦАП из опорного сигнала, и преобразуется с помощью АЦП в цифровой вид.
Далее сигнал поступает на второй усилитель, затем параллельными полосовыми фильтрами выделяются сигналы каждой из используемых частот.
Сигналы каждой частоты параллельно поступают на свои узлы свертки, где подвергаются функции математической свертки.
Свертка сигнала осуществляется с опорным сигналом и его сдвинутой на 90 градусов копией, что позволяет выделить амплитуду и фазу сигнала. Далее амплитудная и фазовая составляющие сигналов каждой частоты проходят через интегратор, где выделяется, в том числе отклонение амплитудной и фазовой составляющей сигнала от среднего значения покоя и проходят через пиковый детектор, чтобы отделить полезную девиацию амплитуды и фазы сигналов каждой частоты от шумовой составляющей. Девиация амплитуды и фазы сигнала на приемной катушке 2 возникают при нахождении объекта из металла 9 в локальной зоне обнаружения 10 между передающей и приемной катушкой. Таким образом, используя многочастотную генерацию и параллельные фильтрацию и обработку поступающих от приемных катушек сигналов, блок управления 4 определяет наличие объекта из металла в каждой локальной зоне обнаружения 10 независимо от другой зоны.
Блок управления 4 вычисляет местоположение объекта из металла 9 в контрольном пространстве следующим образом. Каждая передающая катушка 1 и каждая приемная катушка 2 формируют между собой локальную зону обнаружения 10 своей частоты, таким образом, каждой передающей катушкой 1 будет сформировано несколько локальных зон обнаружения 10 по отношению к каждой приемной катушке 2. Локальные зоны обнаружения 10 формируемые разными передающими катушками 1 и, соответственно, образованных сигналами разных частот, пересекаются в контрольном пространстве.
Контрольное пространство металлообнаружителя в электронном виде можно представить в виде двумерного массива пикселей. Геометрические размеры и расположение каждой локальной зоны обнаружения 10 в контрольном пространстве известны, поскольку известны размеры контрольного пространства и размеры катушек. Тогда каждой локальной зоне обнаружения 10 будет соответствовать определенный набор пикселей, при этом один и тот же пиксель может принадлежать нескольким локальным зонам обнаружения 10, так как они пересекаются в контрольном пространстве.
Каждый перемещаемый через контрольное пространство металлический объект 9, вызовет девиации амплитуды и фазы сигнала в нескольких локальных зонах обнаружения 10. Если «подсветить» пиксели зон обнаружения 10, в которых были обнаружены металлические объекты 9, а затем «погасить» пиксели зон обнаружения 10, в которых не было обнаружено металлических объектов 9, то в итоге, в двумерном массиве пикселей, будут «подсвечены» только области пикселей, которые указывают местоположение металлических объектов 9 в контрольном пространстве, что и требовалось вычислить.
После вычисления блок управления 4 выводит информацию о местоположении объекта(ов) из металла в контрольном пространстве на блок индикации 3.
Металлообнаружитель многозонный вычисляет геометрическое местоположение объектов из металла в контрольном пространстве на основе данных о наличии объектов из металла в каждой локальной зоне обнаружения, решая поставленную техническую задачу.
| название | год | авторы | номер документа |
|---|---|---|---|
| Металлообнаружитель многозонный | 2017 |
|
RU2643672C1 |
| СПОСОБ ОБНАРУЖЕНИЯ МЕТАЛЛИЧЕСКИХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ - МЕТАЛЛООБНАРУЖИТЕЛЬ | 2017 |
|
RU2671914C1 |
| ОБНАРУЖИТЕЛЬ ФЕРРОМАГНИТНЫХ ОБЪЕКТОВ | 2017 |
|
RU2668317C1 |
| МЕТАЛЛООБНАРУЖИТЕЛЬ МНОГОЗОННЫЙ | 2018 |
|
RU2680854C1 |
| Металлодетектор многозонный | 2022 |
|
RU2789988C1 |
| Многозонный металлообнаружитель | 2023 |
|
RU2796199C1 |
| СЕЛЕКТИВНЫЙ МЕТАЛЛОДЕТЕКТОР С ГАРМОНИЧЕСКИМ ВОЗБУЖДЕНИЕМ | 2004 |
|
RU2251125C1 |
| РУЧНОЙ ДЕТЕКТОР С БЕСПРОВОДНОЙ ПЕРЕДАЧЕЙ И ПРИЕМОМ ДАННЫХ | 2019 |
|
RU2714524C1 |
| РУЧНОЙ МЕТАЛЛОДЕТЕКТОР | 2005 |
|
RU2300788C2 |
| СИСТЕМЫ ОБНАРУЖЕНИЯ | 2008 |
|
RU2460098C2 |
Металлообнаружитель многозонный многочастотный с гармоническим возбуждением относится к устройствам обнаружения объектов из металла, проносимых проверяемыми лицами через контрольное пространство. Техническая задача заключается в создании многозонного металлообнаружителя, способного определять местоположение объектов из металла в контрольном пространстве. Металлообнаружитель многозонный содержит передающие и приемные катушки, установленные с одной и другой стороны прохода, блок индикации и блок управления. Определение местоположения объекта из металла осуществляется путем деления контрольного пространства между приемными и передающими катушками на локальные зоны обнаружения и вычисления геометрического местоположения объектов из металла в контрольном пространстве на основе данных о наличии объектов из металла в каждой локальной зоне обнаружения, причем локальные зоны обнаружения образуются параллельным одновременным возбуждением каждой передающей катушки гармоническим сигналом синусоидальной формы заданной частоты, при этом для каждой передающей катушки устанавливается своя собственная частота сигнала, с одновременной параллельной обработкой сигнала каждой приемной катушки, фильтрацией и выделением в ней амплитуды и фазы сигналов частот, наведенных каждой из передающих катушек, включающей определение наличия объекта из металла в каждой локальной зоне обнаружения между передающей и каждой приемной катушкой. 1 н.п. ф-лы, 1 ил.
Металлообнаружитель многозонный многочастотный с гармоническим возбуждением, содержащий передающие катушки, установленные вертикально на одной стороне прохода, приемные катушки, установленные вертикально на другой стороне прохода, блок индикации, блок управления, соединенный с передающими и приемными катушками и генерирующий сигнал о наличии и местоположении объектов из металла в контрольном пространстве на блок индикации отличающийся тем, что блок управления определяет местоположение объекта из металла путем деления контрольного пространства между приемными и передающими катушками на локальные зоны обнаружения и вычисления геометрического местоположения объектов из металла в контрольном пространстве на основе данных о наличии объектов из металла в каждой локальной зоне обнаружения, причем локальные зоны обнаружения образуются параллельным одновременным возбуждением каждой передающей катушки гармоническим сигналом синусоидальной формы заданной частоты, при этом для каждой передающей катушки устанавливается своя собственная частота сигнала, с одновременной параллельной обработкой сигнала каждой приемной катушки, фильтрацией и выделением в ней амплитуды и фазы сигналов частот, наведенных каждой из передающих катушек, включающей определение наличия объекта из металла в каждой локальной зоне обнаружения между передающей и каждой приемной катушкой.
| Прибор для разбивки откоса насыпи или выемки второго пути | 1935 |
|
SU49287A1 |
| СЕЛЕКТИВНЫЙ МЕТАЛЛОДЕТЕКТОР С ГАРМОНИЧЕСКИМ ВОЗБУЖДЕНИЕМ | 2004 |
|
RU2251125C1 |
| US 5680103 A1, 21.10.1997 | |||
| СИСТЕМЫ ОБНАРУЖЕНИЯ | 2008 |
|
RU2460098C2 |
| US 5994897 A1, 30.11.1999 | |||
| US 8159225 B2, 17.04.2012. | |||

