Настоящее изобретение относится к магнитным системам обнаружения, включающим в себя электромагнитные системы обнаружения, и имеет конкретное применение в охранных системах обнаружения, включая проходные детекторы.
Известны проходные металлодетекторы, содержащие решетку передающих катушек и решетку детекторных катушек. Они работают при использовании связи между парами катушек, обеспечивая многозонную систему с парой катушек для каждой зоны, при этом каждая пара работает как независимый металлодетектор. В существующих системах передающие катушки обычно могут быть расположены на одной панели, тогда как приемные катушки находятся на противоположной панели.
Такие известные системы могут обнаруживать присутствие металлических объектов, но имеют очень низкую эффективность распознавания различий между объектами различных видов.
Поэтому настоящим изобретением представляется система обнаружения, содержащая множество генераторов магнитного поля и множество детекторов магнитного поля, которыми могут быть приемные катушки, расположенные вокруг зоны обнаружения, и систему управления, которая может быть выполнена с возможностью возбуждения магнитного поля, например, путем создания электрического тока в передающих катушках, и также может быть выполнена с возможностью измерения магнитного поля в каждом из детекторов, например, путем обнаружения наведенных сигналов в приемных катушках. Система может также содержать обрабатывающее средство, выполненное с возможностью обработки измерений возбуждаемого поля, например, измерением наведенных сигналов, для образования набора данных, характеризующего зону обнаружения.
Генераторы могут быть электрическими проводниками, то есть катушками, через которые может пропускаться электрический ток для возбуждения магнитного поля. Детекторы могут быть электрическими проводниками, то есть катушками, в которых электрический ток будет генерироваться при изменениях магнитного поля, благодаря чему обеспечивается возможность обнаружения поля. В качества варианта можно использовать магнитные детекторы других видов, например полупроводниковые магнитометры.
Данные могут быть данными изображения, выполненными с возможностью формирования изображения зоны обнаружения. Изображение может быть двумерным изображением двумерной зоны обнаружения или трехмерным изображением трехмерной зоны обнаружения. В качестве варианта или наряду с этим данные могут быть характеризующими данными, характеризующими зону обнаружения, и в этом случае обрабатывающее средство может быть выполнено с возможностью анализа данных, например, для обнаружения присутствия объекта заранее заданного вида объекта.
Если данные представляют собой данные изображения, зону обнаружения можно разделить на зоны, которые представлены пикселами и вокселами в изображении, и данные от пикселов или вокселов можно объединить для формирования данных изображения. Если данные представляют собой точные характеризующие данные, то они могут также быть выполнены с возможностью установления связи между множеством зон в пределах зоны обнаружения. Поэтому система может быть выполнена с возможностью формирования сигнала тревоги для конкретной зоны, но с повышенной эффективностью различения между крупными объектами на большом расстоянии от генераторов или детекторов и небольшими объектами вблизи генераторов или детекторов.
Система обнаружения может быть охранной системой обнаружения, в которой катушки установлены на опорном средстве, выполненном с возможностью, позволяющей человеку проходить через зону формирования изображения.
Обрабатывающее средство может быть выполнено с возможностью образования множества наборов данных, когда объект перемещается через зону формирования изображения, и объединения наборов данных для формирования результирующего набора данных. Объектом может быть, например, человек вместе с его одеждой и любыми предметами, переносимыми им.
Система обнаружения может содержать средство восприятия перемещения или средство восприятия положения, выполненное с возможностью измерения положения и/или изменений положения, по меньшей мере, части объекта, например, относительно любых генераторов или детекторов, или другой части объекта, и оно может быть выполненным с возможностью использования изменений положения при объединении наборов данных. Средство восприятия перемещения может быть видеокамерой или другой системой формирования изображения, или может содержать датчики других видов, такие как светочувствительные датчики, в которых прерывание светового пучка объектом используется для обнаружения положения объекта.
Обрабатывающее средство может быть выполнено с возможностью объединения наборов данных для получения набора томографических данных, представляющего томографическую модель или изображение объекта.
Система обнаружения может содержать средство восприятия смещения, выполненное с возможностью обнаружения части объекта на расстоянии от опорного положения и внесения поправки на смещение при объединении наборов данных. Это средство восприятия смещения также может содержать систему формирования изображения, такую как видеокамеру, но также может содержать датчики других видов.
Опорное положение может быть положением относительно, по меньшей мере, части объекта. Смещение может быть смещением относительно, по меньшей мере, части объекта. Теперь предпочтительные осуществления настоящего изобретения будут описаны только для примера с обращением к сопровождающим чертежам, на которых:
фигура 1 - схематическое представление системы обнаружения согласно осуществлению изобретения;
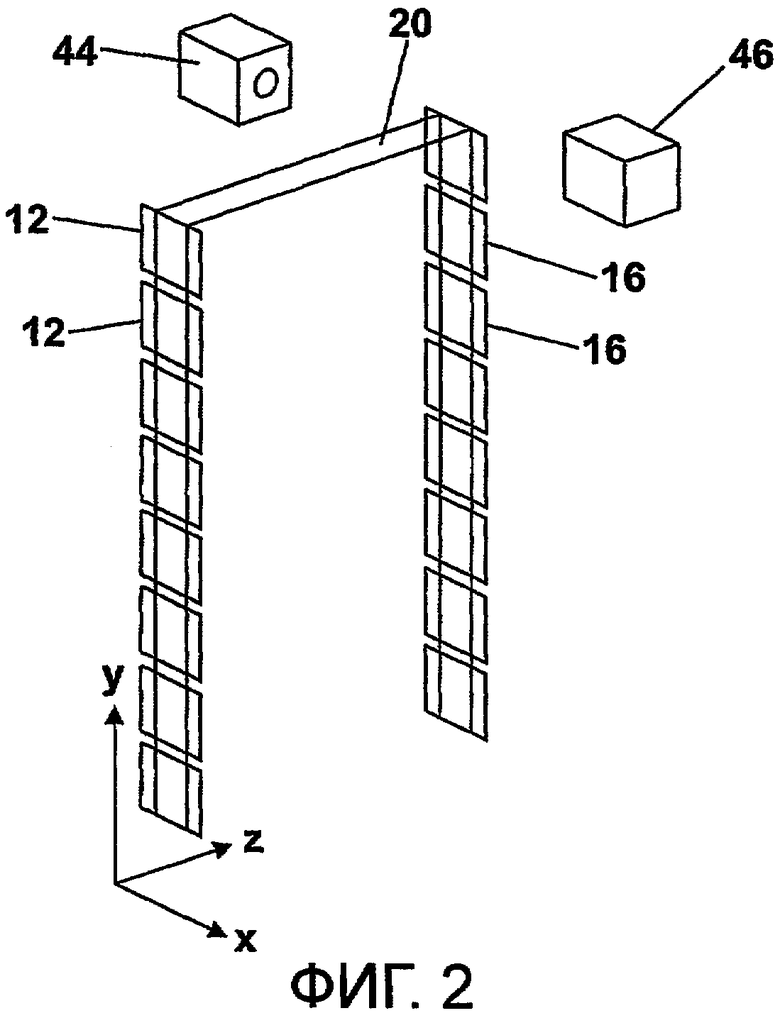
фигура 2 - перспективный вид решетки катушек системы обнаружения из фигуры 1;
фигура 3 - схема, иллюстрирующая вычисление магнитного поля, создаваемого катушками из фигуры 1;
фигуры 4а и 4b - карты чувствительности для определенных пар катушек системы из фигуры 2;
фигура 5 - схематическое представление, иллюстрирующее работу системы из фигуры 1 в одном режиме работы;
фигура 6 - дополнительное схематическое представление системы из фигуры 1 в том же самом режиме работы;
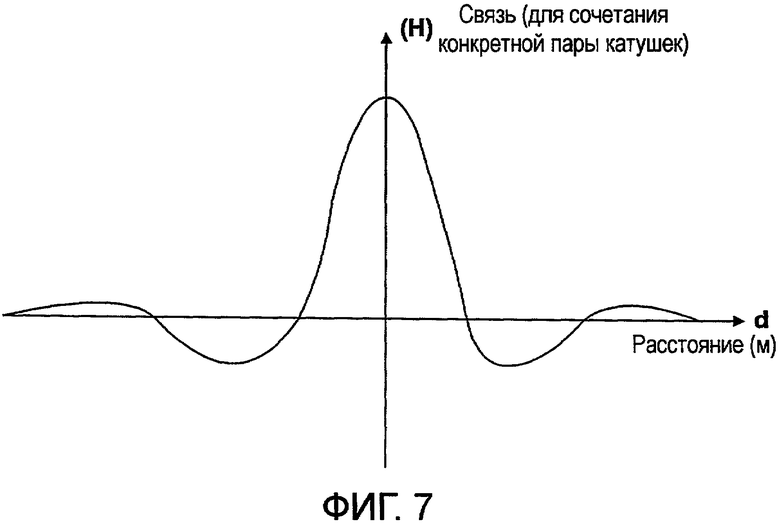
фигура 7 - график, иллюстрирующий, каким образом связь пары катушек системы из фигуры 1 изменяется с расстоянием от катушек этой системы;
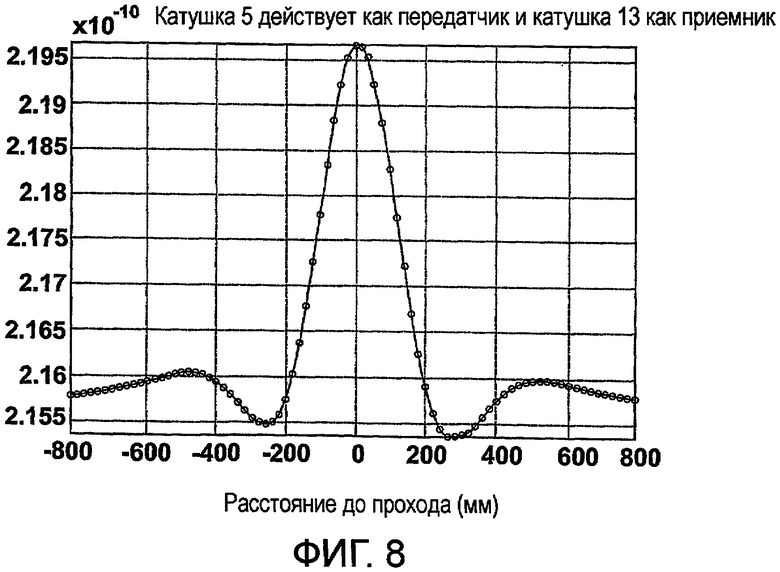
фигура 8 - конкретный пример графика, аналогичного графику из фигуры 7, для конкретной пары катушек системы из фигуры 1;
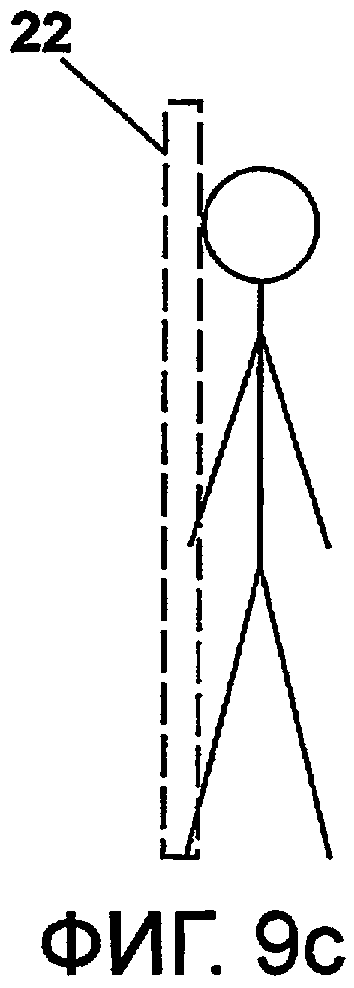
фигуры 9a, 9b и 9с - виды системы из фигуры 1 в первом режиме работы;
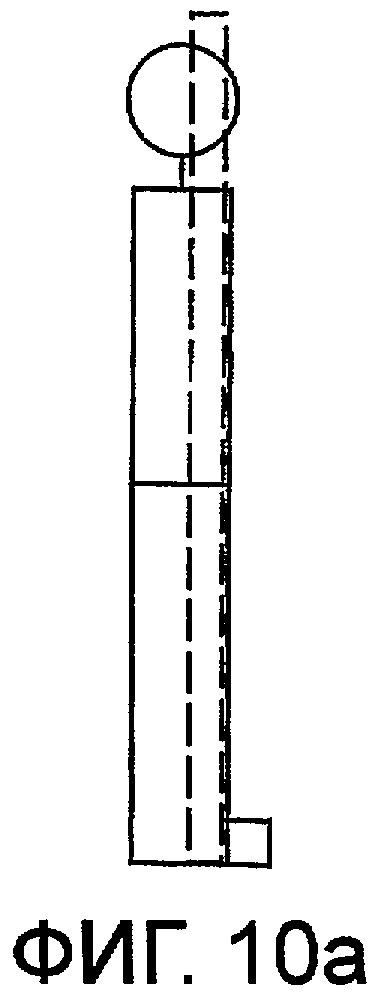
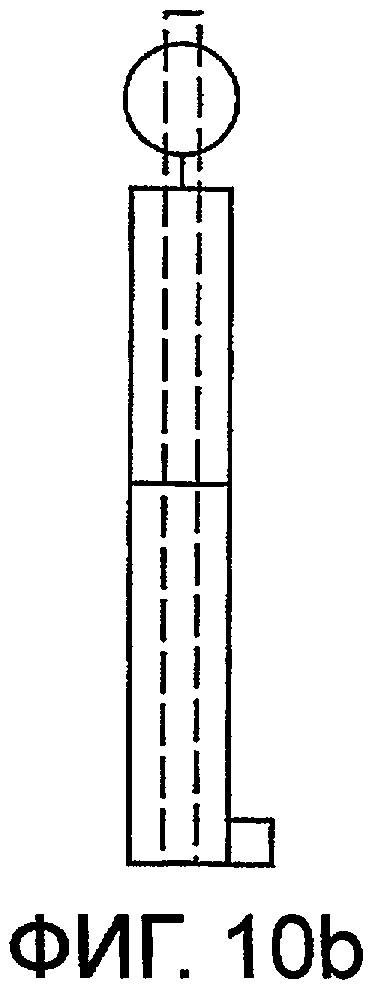
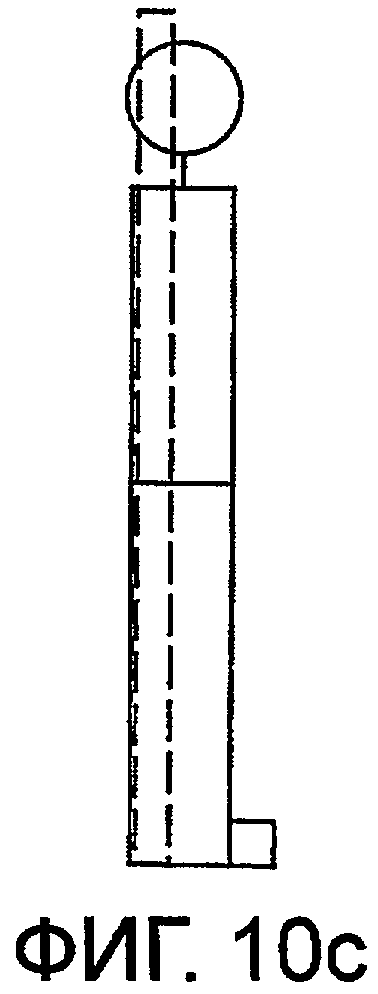
фигуры 10a, 10b и 10с - виды системы из фигуры 1 во втором режиме работы; и
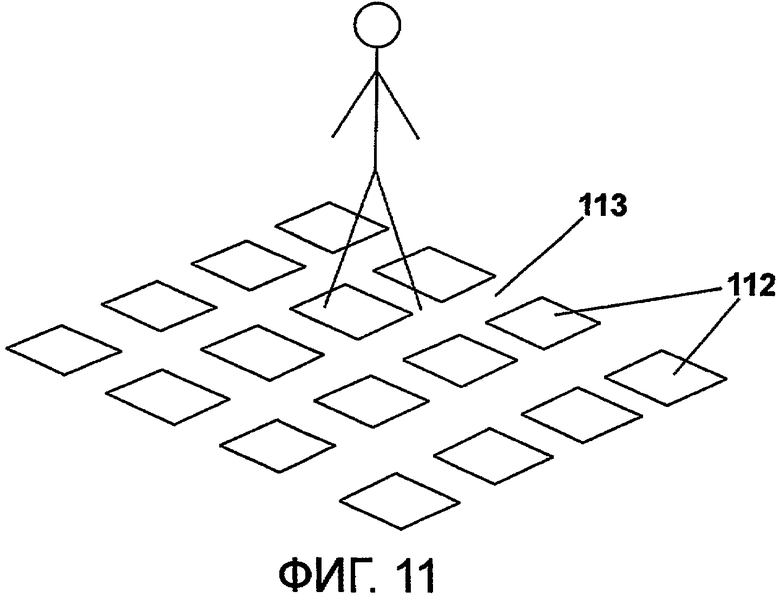
фигура 11 - схематический вид системы обнаружения согласно второму осуществлению изобретения.
Обратимся к фигурам 1 и 2, где система обнаружения содержит линейную решетку 10 передающих катушек 12 и линейную решетку 14 приемных катушек 16. Решетки 10, 14 расположены по обеим сторонам опорной рамы 18, которая определяет арку или проход 20, в пределах которого имеется зона 22 формирования изображения, через которую может проходить человек. Имеются одинаковые количества передающих и приемных катушек, в этом случае по восемь каждого вида, при этом каждая передающая катушка 12 находится на одном уровне и напротив соответствующей приемной катушки 16.
Система 30 управления выполнена с возможностью создания и управления изменяющегося электрического тока независимо в каждой из передающих катушек 12 для возбуждения магнитных полей и при наличии поля, возбуждаемого каждой передающей катушкой, для измерения сигналов в виде электрических токов, создаваемых в каждой из приемных катушек 16. Размеры прохода составляют 220 мм по глубине, 2026 мм по высоте и 860 мм по ширине, при этом они предполагаются совпадающими с осями x, y и z, соответственно.
Простые квадратные катушки используют для передающих и приемных катушек, при этом каждая имеет размер 220 мм на 220 мм сторон квадрата и глубину 1 мм. Для сохранения симметрии катушки располагают на обеих панелях равномерно с интервалами 38 мм, что делает томографический анализ более легким. Центральную плоскость при x=0 мм принимают за исследуемую плоскость с размером (0, 0, -380)~(0, 2026, 380).
Управляющая система также включает в себя электронику 40 для получения и предварительного формирования данных, выполненную с возможностью сбора данных с приемных катушек 16, и обрабатывающую систему 42 в виде хост-компьютера, выполненного с возможностью выполнения обработки предварительно сформированных сигналов с приемных катушек 16 для образования изображений и выполнения алгоритмов обнаружения.
Кроме того, предусмотрены две видеокамеры 44, 46, по одной на каждой стороне прохода 20, ориентированные так, что они обе воспроизводят зону формирования изображения под различными углами. Видеокамеры 44, 46 также соединены с компьютером 42. Компьютер 42 выполнен с возможностью обработки сигналов видеоизображений, которые он принимает с видеокамер 44, 46, и индукционных сигналов, которые он принимает с приемных катушек 16, и обработки их так, как будет описано более подробно ниже.
Результат измерения можно получать при возбуждении одной из передающих катушек 12 изменяющимся по синусоиде сигналом переменного тока, посредством которого создается магнитное поле. Это магнитное поле видоизменяется электропроводными или ферромагнитными объектами в поле, и результирующие изменения поля измеряют с помощью решетки катушек 16 обнаружения. Если ряд передающих катушек 12 будут возбуждать последовательно вокруг объекта и для каждой передающей катушки измерять поле каждой из приемных катушек, то можно формировать изображение объекта, используя адекватное программное обеспечение для восстановления, путем объединения результирующих детектируемых сигналов. Количество и местоположения катушек обнаружения оказывают существенное влияние на качество изображения.
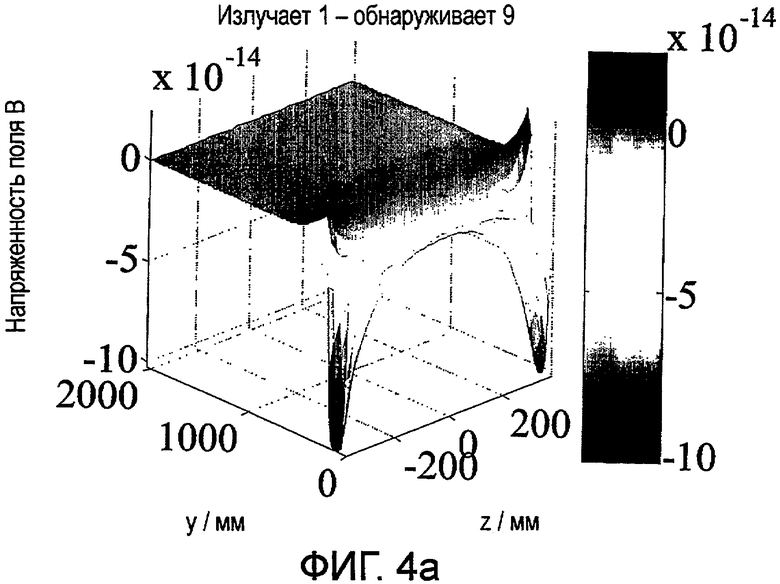
Можно образовать карты чувствительности, которые показывают пространственную чувствительность конкретного сочетания катушек возбуждения-обнаружения к возмущениям пикселов в пределах объектного пространства, то есть к возмущениям в каждом пикселе зоны формирования изображения. Карты чувствительности широко используют для решения обратных задач при восстановлении изображений, поскольку они однозначно описывают распределение удельной проводимости по отношению к возмущениям пикселов для данной матрицы датчиков. Эти карты могут быть вычислены на основании результатов непосредственных измерений, аналитическим приближением или численными способами. В данном случае карты чувствительности были получены по скалярному произведению значений поля В , теоретически вычисленных с использованием закона Био-Савара на основании упрощенной модели, и было осуществлено сравнение их с результатами моделирования методом конечных элементов с использованием программного обеспечения Maxwell Ansoft.
Как показано на фигуре 3, из закона Био-Савара следует, что магнитное поле В будет создаваться коротким отрезком dL провода, пропускающего ток I , в соответствии со следующей формулой:
где направление dL является направлением тока, а вектор r направлен от короткого отрезка тока к точке Р наблюдения, в которой вычисляют магнитное поле. В случае тока, протекающего в катушке, всегда требуется интегрирование, чтобы найти в точке полное магнитное поле, создаваемое всем контуром катушки. Постоянная µ 0 является магнитной проницаемостью свободного пространства, то есть 4π×10-7 Н/м.
Для пары катушек чувствительность между катушками может быть вычислена как пропорциональная выражению B i· B j, где B i и B j представляют собой плотности магнитного поля, получаемые в случае, когда катушка (i) возбуждения и воспринимающая катушка (j) возбуждаются соответственно единичным током.
Программа может быть реализована для поля В и затем осуществлено вычисление карты чувствительности для пары квадратных катушек с использованием следующих этапов.
Задание катушек решетки датчиков, главным образом координат (x, y, z) точек перегиба катушек.
Разделение катушки на некоторое количество небольших токовых элементов и затем определение начального и конечного положений (x, y, z) каждого элемента.
Вычисление составляющих x, y и z магнитного поля B в точке P(x, y, z) с использованием уравнения (1).
Вычисление продолжают до тех пор, пока поля В во всех точках на воспринимающей плоскости не будут вычислены для катушки возбуждения и катушки обнаружения.
Определение карты чувствительности для этой конкретной пары катушек путем получения скалярного произведения полей, создаваемых катушкой возбуждения и катушкой обнаружения.
Время вычисления для образования карты в основном определяется числом пикселов, распределенных по воспринимающей плоскости. С учетом компромисса между временем вычисления и разрешающей способностью высоту (по оси y) и ширину (по оси z) прохода в равной степени подразделяют на сетку координат 51 на 20, соответственно, образуя 1020 пикселов для каждой карты чувствительности. В этом осуществлении при таком разбиении разрешающая способность карты будет около 4 см на 4 см.
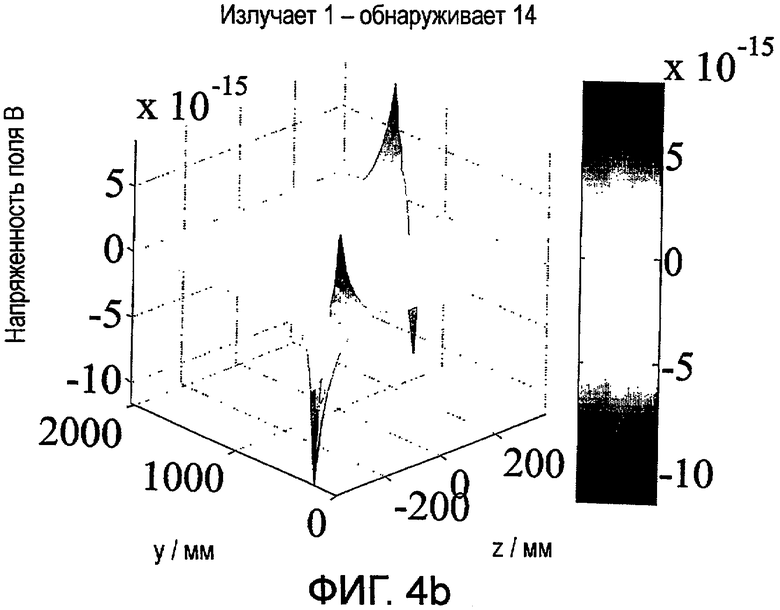
На фигуре 4а показана одна первичная карта системы, полученная способом, описанным в предшествующем разделе, когда нижняя передающая катушка, катушка 1, возбуждается, а приемная катушка непосредственно напротив нее, катушка 9, действует как детектор. На фигуре 4b показана карта в случае, когда катушка 1 возбуждается, а приемная катушка, шестая от низа, катушка 16, действует как детектор. Здесь не даны другие карты, но их общий формат можно представить из этих карт. Для адекватного представления карты получают, используя переходную функцию из 20×51 пикселов.
Распределения карт проявляют общие тенденции. Общая чувствительность уменьшается по мере дополнительного разнесения катушек возбуждения и обнаружения в соответствии с изменениями сигналов, показанными в виде напряженности поля В . Для каждой пары катушек, как показано абсолютным значением, чувствительность возрастает в области, приближающейся к катушкам, вследствие усиленной связи магнитного поля в этих положениях.
Характеристика решетки катушек является в значительной степени трехмерной, зависящей от воспринимающей плоскости.
В предположении, что материалы объекта являются линейными и изотропными по электрическим и магнитным свойствам для случаев возбуждения синусоидальным сигналом физический принцип задач электромагнитной индукции можно описать уравнением распространения, записанным через магнитный векторный потенциал А ,

Здесь J катушки обозначает плотность (А/м2) тока источника, протекающего через катушку возбуждения. Имея полученный векторный потенциал А , поле В можно вычислить, используя В =∇× А . В одном осуществлении был использован численный метод анализа, который можно выполнять, используя электромагнитный метод конечных элементов.
Геометрию датчиков моделировали, используя коммерческий пакет программ для трехмерного анализа методом конечных элементов, который обеспечивает кусочное решение для полевых задач путем разделения задачи на ряд небольших тетраэдральных элементов, в пределах которых аппроксимируют значения поля. Чтобы гарантировать, что приложенные граничные условия не будут чрезмерно ограничивать решение, было найдено решение для области задачи, которая в 9 раз превышает объем модели датчиков. Окружающий воздух был определен свойством материала вакуума.
В модели датчиков катушки были упрощенными в виде одиночного проводника с квадратным поперечным сечением 10 мм на 10 мм. Всего 59053 тетраэдральных элемента были объединены в ячейки, чтобы гарантировать схождение результатов моделирования с заданной погрешностью 0,25% после 13 вычислительных проходов. Время для моделирования возбуждения одной катушкой составляло около 2 ч, вследствие чего потребовалось в целом 32 ч в случае возбуждения 16 катушек (восьми передающих и восьми приемных).
Первичные карты чувствительности, вычисленные в зависимости от полей В , извлеченных из результатов моделирования, аналогичны картам чувствительности из фигур 4а и 4b. Проводник с квадратным поперечным сечением 1 см2 в методе конечных элементов эквивалентен катушке со 100 витками в подходе Био-Савара. Обе карты для одной и той же пары катушек, показанные на фигуре 4 и фигуре 6, хорошо согласуются при величине погрешности в пределах 8%.
Обратная задача для электромагнитного метода заключается в преобразовании зарегистрированных данных в изображение, которое представляет распределение удельной проводимости. Обычно она является некорректно поставленной и плохо обусловленной задачей, поскольку количество независимых измерений обычно гораздо меньше, чем количество пикселов для изображения. Восстановление дополнительно усложняется слабыми эффектами поля, в результате чего изменения материала объекта проявляются в амплитуде и направлении опрашивающего поля.
Однако в случае небольших изменений значений пикселов можно осуществлять линейное приближение в соответствии с D=SD, где D представляет собой вектор измерения (длиной М, где М является числом передающих/приемных пар), Р представляет собой вектор пикселов изображения (длиной N, где N является числом пикселов) и матрица S известна как матрица чувствительности (также называемая матрицей Якоби) вида M×N. Матрицу Якоби S можно образовать с помощью коэффициентов чувствительности релевантных пар катушек. Например, в этом осуществлении матрица S является матрицей 64×1020, где число 64 представляет 8×8 измерений и число 1020 представляет пикселы изображения. Матрицу А обычно не обращают, поскольку она в общем случае не является квадратной и в любом случае является слабо обусловленной.
Вместо нахождения решения для Р методом наименьших квадратов, которое будет неустойчивым вследствие слабой обусловленности S, необходима некоторая регуляризация. В одном осуществлении используют регуляризованное решение Тихонова, P=(STS+αI)-1STD, которое является минимумом ||D·A·P||2+α2||D||2, где  и верхний индекс Т обозначает транспозицию. I является единичной матрицей. Здесь α>0 представляет собой параметр регуляризации, который регулирует компромисс между аппроксимацией данных и гладкостью решения.
и верхний индекс Т обозначает транспозицию. I является единичной матрицей. Здесь α>0 представляет собой параметр регуляризации, который регулирует компромисс между аппроксимацией данных и гладкостью решения.
Другие осуществления включают в себя другие методы регуляризации, в том числе итерационные методы решения (например, решение методом Ландвебера или сопряженное градиентное решение методом наименьших квадратов), регуляризацию полной вариации, усеченное разложение по особым значениям. К тому же диапазон значений пикселов может быть ограниченным. Равным образом можно использовать другие способы восстановления.
Следовательно, используя некоторое количество различных способов, можно формировать двумерное изображение из отображаемой зоны по сигналам от измерительных катушек 16.
В случае, когда изображение не требуется, но необходима повышенная точность обнаружения объектов определенного размера в конкретных зонах, описанный выше способ видоизменяют таким образом, что пикселы заменяются зонами, и решение системы уравнений для объема электропроводного материала в каждой зоне находят вычислением, используя данные, измеренные от множества возбужденных и воспринимающих катушек.
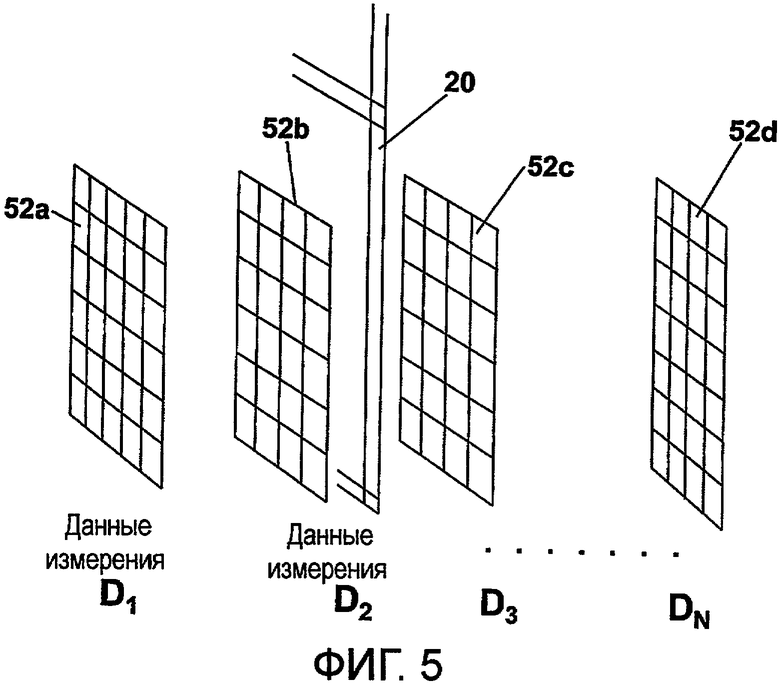
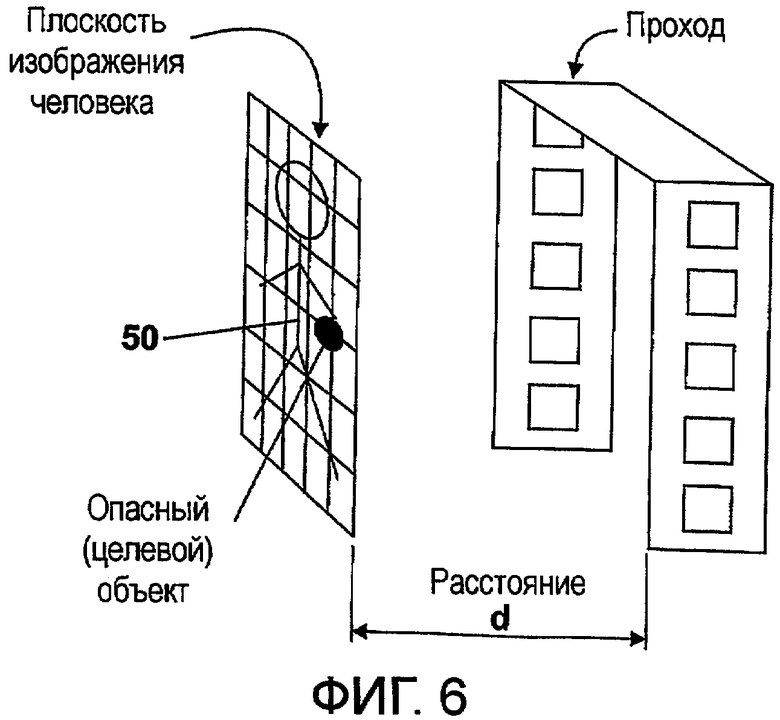
Обратимся к фигурам 5 и 6, где в одном режиме работы система управления выполнена с возможностью формирования плоского изображения человека 50, когда он проходит через проход 20. Чтобы сделать это, выполняют некоторое количество сканирований, когда человек 50 продвигается через проход 20, и для каждого сканирования определяют положение человека, используя видеокамеры 44, 46, а система управления определяет номинальные плоскости 52а, 52b, 52c, 52d изображения, в которых человек находится, и какая формируется плоскость изображения в случае этого сканирования. Поэтому, если данные D1, D2, D3 изображений могут быть получены, то для каждого сканирования будет отдельный набор, при этом каждый набор включает в себя значение для каждого пиксела двумерного изображения.
Когда общее количество N наборов данных получено, они могут быть объединены системой управления для образования единственного набора объединенных данных. Он представляет собой набор данных плоского изображения, при этом данные для каждого пиксела являются объединением соответствующих значений из каждого из наборов изображений, то есть
DT новые=[DT 1, DT 2, DT 3,…DT N]
Затем систему приспосабливают для нахождения значений Р пикселов с использованием:
Dновые=SноваяP
Здесь Sновая является трехмерной матрицей чувствительности, определяющей чувствительности для каждого пиксела изображения для каждого положения плоскости изображения, для каждой пары передающей/приемной катушек. Используя методы, описанные ранее, это соотношение можно обратить для нахождения изображения Р, пользуясь результатами измерений от сочетаний катушек и профилем сигнала, когда человек проходит через детектор.
Обратимся к фигуре 7, где чувствительность для каждой пары передающей/приемной катушек изменяется в зависимости от расстояния d в некоторой степени, которую можно вычислить или измерить. На фигуре 8 показан пример для одной из пар катушек в системе из фигур 1 и 2.
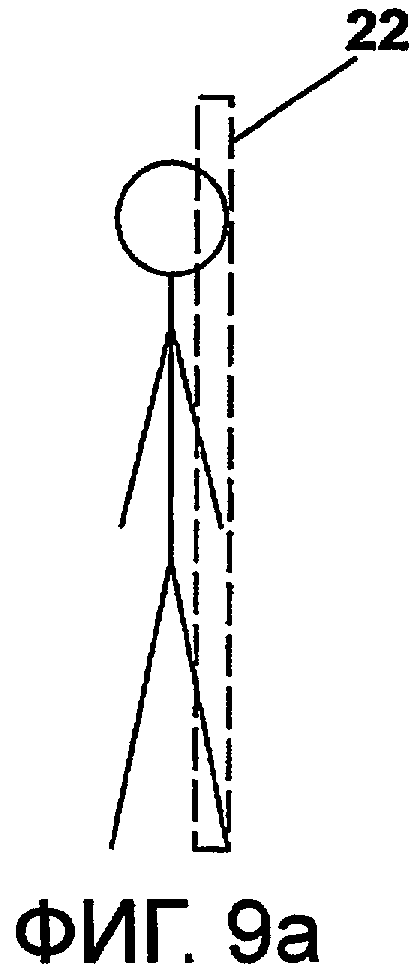
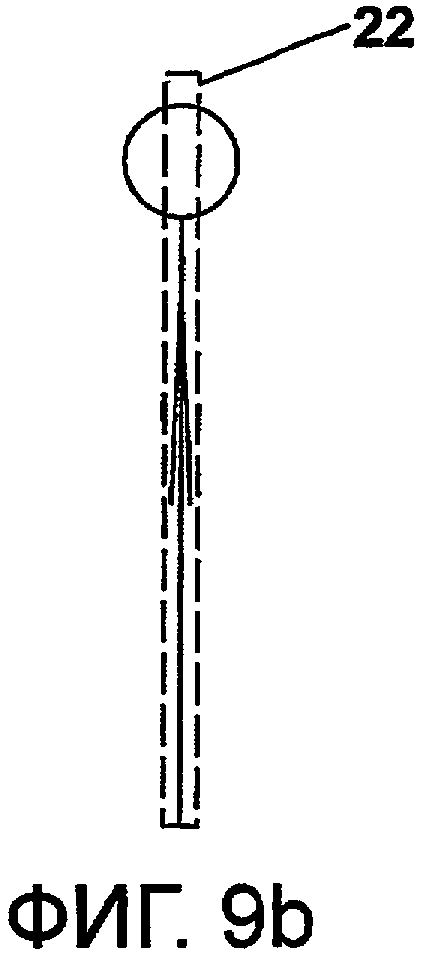
Обратимся к фигурам 9а, 9b и 9с, где в другом режиме работы система управления выполнена с возможностью повторяющегося управления сигналами для передающих катушек 12 и отслеживания сигналов от приемных катушек 16 с тем, чтобы формировать последовательность плоских изображений из зоны 22 формирования изображения, когда человек 50 проходит через раму 20 и, следовательно, через зону формирования изображения. Для каждого плоского изображения каждую из передающих катушек 12 активируют в свою очередь в соответствующий период передачи и во время каждого периода передачи сигналы от каждой из детекторных катушек 16 измеряют и регистрируют. Эти результаты измерений для всех сочетаний передающей катушки и детекторной катушки объединяют для образования матрицы измерения. Затем ее совместно с матрицей чувствительности используют для определения векторов пикселов для пикселов изображения, создающих плоское изображение.
В модификации этого осуществления мультиплексирования с разделением времени, чтобы сократить времена сканирования и, следовательно, чтобы иметь возможность увеличить количество сканируемых данных, которые могут быть собраны для одного человека, проходящего через сканер, используют частотное мультиплексирование. Оно может быть в дополнение или вместо мультиплексирования с разделением времени. В этом случае две или большее количество передающих катушек 12 выполняют с возможностью одновременной передачи, при этом каждая излучает на своей собственной частоте. Эти одновременные передачи будут создавать сигнал в каждой из приемных катушек 12, который включает в себя составляющие от каждой из активных передающих катушек. Эти составляющие можно разделять или различать на основании их различных частот, используя подходящую фильтрацию, так что измерения для множества передающих/приемных пар можно осуществлять одновременно. В общем случае для различения связи между конкретными сочетаниями катушек можно использовать другие схемы модуляции.
В режиме работы, описанном выше, система выполнена с возможностью построения двумерного изображения человека 50. Однако когда человек продвигается через раму 20, его руки 52 и ноги 54 перемещаются в продольном направлении x относительно его тела 56, и поэтому центральная вертикальная плоскость через тело 56 человека будет содержать различные части тела человека, когда он движется. Поэтому обратимся к фигурам 9а, 9b и 9с, где в еще одном режиме работы процессор 42 выполнен с возможностью анализа кадра видеоизображения человека, регистрируемого в каждый момент времени, когда формируется электромагнитное изображение от катушек 12, 16, для идентификации, какие части человека 50 находятся в пределах одной плоскости формирования изображения и, следовательно, в пределах этого электромагнитного изображения, и насколько далеко эти части смещены в направлении x относительно центральной плоскости через человека. Данные изображения, относящиеся к каждой части человека из каждого из плоских изображений, затем могут быть объединены для построения набора данных изображения, относящихся к человеку в нейтральном положении вместе с обеими руками и обеими ногами, расположенными в одной плоскости. Например, электромагнитное изображение, полученное в случае, когда находящиеся впереди рука и нога человека входят в зону формирования изображения, как показано на фигуре 9а, будет содержать данные, относящиеся к этой руке и этой ноге, а электромагнитное изображение, полученное в случае, когда находящиеся сзади рука и нога человека оставляют зону формирования изображения, как показано на фигуре 9c, будет содержать данные, относящиеся к этой руке и этой ноге. Эти данные могут быть объединены с данными из электромагнитного изображения, формируемого в случае, когда человек расположен по центру в пределах зоны 22 формирования изображения, как показано на фигуре 9b, для построения набора данных, включающего в себя данные, относящиеся ко всем частям человека, в том числе к любым предметам, переносимым им. Этот набор данных можно использовать для формирования изображения, предназначенного для наблюдения человеком, и его также можно анализировать с помощью подходящих алгоритмов обработки изображений для определения, не содержит ли оно характерных признаков, представляющих опасность, например, когда данные предполагают наличие оружия или ножа, проносимого человеком.
Должно быть понятно, что в этом режиме, когда конечный набор данных изображения представляет собой плоское изображение, видеоизображения используют для определения смещения каждого воспроизводимого характерного признака в каждом электромагнитном изображении относительно опорного положения в пределах этой плоскости, а процессор 42 выполняют с возможностью сдвига каждого характерного признака обратно в его опорное положение. В дополнение к смещениям в направлении x при формировании конечного набора данных также можно обнаруживать и корректировать смещения в направлениях y и z.
Обратимся к фигурам 10a, 10b и 10с, где в еще одном режиме работы процессор 42 выполнен с возможностью анализа видеоизображений для определения положения человека 50 относительно зоны 22 формирования изображения и катушек 12, 16 и, следовательно, для идентификации различных плоскостей через человека, которые воспроизводятся электромагнитными изображениями, и их относительных положений в пределах человека 50. Затем процессор 42 выполняют с возможностью объединения наборов данных плоских электромагнитных изображений, чтобы сформировать трехмерный набор данных томографического изображения человека, в том числе любых предметов, которые он несет с собой. И опять его можно использовать для отображения изображения и анализа с помощью подходящих алгоритмов обработки изображений, чтобы идентифицировать любые возможные опасности.
Обратимся к фигуре 11, где во втором осуществлении изобретения сканирующая система содержит единственную решетку катушек 112, которые расположены, по существу, в пределах единственной плоскости в структуре 113 пола, по которому может проходить человек, подлежащий сканированию. В этом случае каждая из катушек может иметь ток, пропускаемый через нее с помощью системы управления, так что она действует как передающая катушка, и также может иметь ток, проходящий через нее, измеряемый системой управления, так что она может действовать как приемная катушка. Когда человек идет в пределах сканера, получают последовательность наборов данных изображений, которые в этом случае являются трехмерными, при этом каждый набор соответствует единственному кадру трехмерного изображения. Поэтому каждое изображение будет содержать некоторое количество объемных элементов или вокселов. Для каждого кадра изображения каждую из катушек по очереди возбуждают как передающую катушку, а для каждой излучающей катушки сигналы, получаемые в каждой из других катушек, которые в таком случае действуют как приемные катушки, измеряют и регистрируют. Этим образуют набор или матрицу измерений, по одной для каждой передающей и приемной пары, которые можно использовать совместно с матрицей чувствительности для образования наборов данных изображений или других наборов данных для анализа, как в первом осуществлении. Как и в первом осуществлении, наборы данных изображений из кадров изображений могут быть объединены. И опять формирование видеоизображений можно использовать для определения положения человека и различных частей человека в каждом кадре, так что изменения этих положений между кадрами можно корректировать при объединении кадров.
В модификации этого осуществления плоскую решетку катушек 112 используют только в качестве передающих катушек, а плоскую решетку детекторных катушек или другие детекторы располагают в настиле поверх катушек 112. Эти передающая и приемная решетки работают аналогично линейным решеткам из фигуры 2, но каждый набор данных изображения представляет трехмерное изображение. Когда систему используют для получения данных, предназначенных для анализа, а не формирования изображения, наборы данных содержат данные, относящиеся к некоторому количеству объемных элементов или вокселов сканируемого или воспроизводимого пространства, через которое проходит человек. В дополнительных модификациях решетки передатчиков и приемников могут быть расположены на стенках, на противоположных сторонах от сканируемого или воспроизводимого пространства, или в оборудовании здания, или фактически в разнообразных формах.
Изобретение относится к магнитным системам обнаружения, включающим в себя электромагнитные системы обнаружения. Сущность изобретения заключается в том, что магнитная система обнаружения содержит множество генераторов магнитного поля и множество детекторов магнитного поля, расположенных вблизи зоны обнаружения, и систему управления, выполненную с возможностью возбуждения магнитного поля с использованием генераторов, и измерений возбуждаемого магнитного поля для каждого из генераторов с использованием каждого из детекторов, обрабатывающее средство, выполненное с возможностью обработки измерений для формирования множества наборов данных, характеризующих зону обнаружения, когда объект перемещается через зону обнаружения, и объединения наборов данных для формирования результирующего набора данных, и средство определения смещения, выполненное с возможностью детектирования смещения части объекта от опорного положения, при этом обрабатывающее средство выполнено с возможностью внесения поправки на смещение при объединении наборов данных. Технический результат - повышение качества изображения. 2 н. и 16 з.п. ф-лы, 10 ил.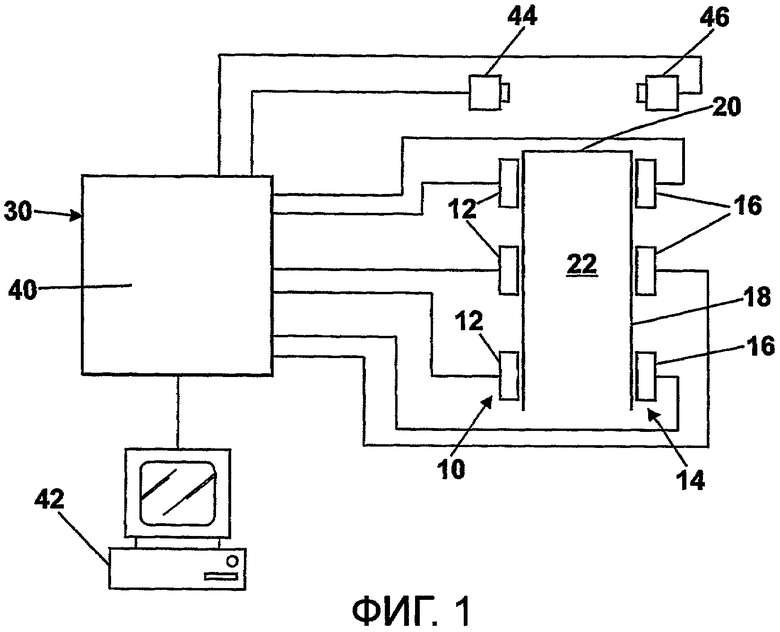
1. Магнитная система обнаружения, содержащая множество генераторов магнитного поля и множество детекторов магнитного поля, расположенных вблизи зоны обнаружения, и систему управления, выполненную с возможностью возбуждения магнитного поля с использованием генераторов, и измерений возбуждаемого магнитного поля для каждого из генераторов с использованием каждого из детекторов, обрабатывающее средство, выполненное с возможностью обработки измерений для формирования множества наборов данных, характеризующих зону обнаружения, когда объект перемещается через зону обнаружения, и объединения наборов данных для формирования результирующего набора данных, и средство определения смещения, выполненное с возможностью детектирования смещения части объекта от опорного положения, при этом обрабатывающее средство выполнено с возможностью внесения поправки на смещение при объединении наборов данных.
2. Магнитная система обнаружения по п.1, которая представляет собой охранную систему обнаружения, в которой генераторы и детекторы установлены на опорном средстве, выполненном с возможностью, позволяющей человеку проходить через зону формирования изображения.
3. Магнитная система обнаружения по п.1 или 2, содержащая средство восприятия перемещения, выполненное с возможностью измерения изменений положения, по меньшей мере, части объекта относительно генераторов и детекторов и использования изменений положения при объединении наборов данных.
4. Магнитная система обнаружения по п.3, в которой наборы данных объединяются для формирования объединенного набора данных, который включает в себя данные для каждого элемента в плоскости элементов, при этом данные для каждого элемента включают в себя данные из каждого набора данных.
5. Магнитная система обнаружения по п.4, в которой обрабатывающее средство выполнено с возможностью объединения наборов данных для получения набора томографических данных, представляющих объект.
6. Магнитная система обнаружения по любому из пп.1, 2, 4, 5, в которой опорное положение является положением относительно, по меньшей мере, части объекта и смещение является смещением относительно, по меньшей мире, части объекта.
7. Магнитная система по любому из пп.1, 2, 4, 5, в которой детекторы содержат детекторные катушки, при этом система управления выполнена с возможностью осуществления измерений путем детектирования электрических сигналов, наводимых в детекторных катушках.
8. Магнитная система по любому из пп.1, 2, 4, 5, в которой генераторы содержат генераторные катушки, при этом система управления выполнена с возможностью возбуждения магнитного поля путем генерирования электрического тока в генераторных катушках.
9. Магнитная система по любому из пп.1, 2, 4, 5, в которой, по меньшей мере, один из генераторов выполнен с возможностью работы также в качестве детектора.
10. Магнитная система по любому из пп.1, 2, 4, 5, в которой, по меньшей мере, часть генераторов или детекторов размещена в планарной решетке.
11. Магнитная система по любому из пп.1, 2, 4, 5, в которой генераторы и детекторы расположены в полу, или стене, или оборудовании здания.
12. Способ магнитного обнаружения объекта, содержащий этапы, на которых предусматривают множество генераторов магнитного поля и множество детекторов магнитного поля, расположенных вокруг зоны обнаружения, возбуждают магнитное поле, используя каждый из генераторов, измеряют магнитное поле, формируемое каждым из генераторов, используя каждый из детекторов, и обрабатывают измеренные данные для формирования множества наборов данных, характеризующих зону обнаружения, когда объект перемещается через зону обнаружения, и объединяют наборы данных для формирования результирующего набора данных, при этом способ дополнительно содержит этап, на котором детектируют смещение части объекта от опорного положения, и вносят поправки на смещение при объединении наборов данных.
13. Способ по п.12, в котором генераторы и детекторы устанавливают на опорном средстве, выполненном с возможностью, позволяющей человеку проходить через зону обнаружения.
14. Способ по п.12, в котором дополнительно измеряют изменения положения, по меньшей мере, части объекта относительно генераторов и детекторов и используют изменения положения при объединении наборов данных.
15. Способ по п.14, в котором объединяют наборы данных для формирования набора томографических данных, представляющих объект.
16. Способ по любому из пп.12-15, в котором опорное положение является положением относительно, по меньшей мере, части объекта и смещение является смещением относительно, по меньшей мере, части объекта.
17. Способ по любому из пп.12-15, в котором генераторы содержат генераторные катушки и магнитные поля возбуждают путем генерирования электрического тока в генераторных катушках.
18. Способ по любому из пп.12-15, в котором детекторы содержат детекторные катушки и магнитные поля измеряют путем измерения наведенных сигналов в детекторных катушках.
| Бесколесный шариковый ход для железнодорожных вагонов | 1917 |
|
SU97A1 |
| DE 19907758 А1, 26.08.1999 | |||
| JP 2004279035 А, 07.10.2004 | |||
| СЕЛЕКТИВНЫЙ МЕТАЛЛОДЕТЕКТОР С ГАРМОНИЧЕСКИМ ВОЗБУЖДЕНИЕМ | 2004 |
|
RU2251125C1 |
| Четырехтактный двигатель внутреннего горения двукратного расширения | 1935 |
|
SU49631A1 |

