ОБЛАСТЬ ИССЛЕДОВАНИЯ
[0001] Рассматриваемые варианты изобретения предлагают способ для увеличения возможности улучшить безопасность с помощью стратегии вождения поезда, где используются путевые сигналы, соответствующей требованиям Системы "Автоматического Обеспечения Защиты Движения Поезда" (АТР).
УРОВЕНЬ ТЕХНИКИ
[0002] Различные известные системы обеспечения безопасности движения поезда разрабатываются во всем мире с целью предоставить технические железнодорожные устройства для обеспечения безопасной эксплуатации в случае ошибке по вине человека.
[0003] Положительный Контроль Движения Поезда (РТС) относится к известной технологии, которая разработана для предотвращения столкновения между поездами, схода с рельсов из-за превышения скорости, несчастных случаев или ранений работников железнодорожного полотна, работающих в пределах разрешенных ограничений, в результате несанкционированного вторжения поезда, и также предотвратить движения поездов по стрелке, оставленной в неправильном положении. Хотя системы РТС сильно различаются в сложности и степени детализации, основанной на уровне автоматизации и функционала, который они выполняют, используемой архитектуре системы и уровню контроля поезда, которому они могут соответствовать, системы РТС нетерпимы к противоречиям, в том, что это системы сигнализации и контроля поездов на базе процессора (см. Заголовок 49 Свода нормативных актов, Часть 236, Глава Н), которые используют и компьютерные, и радио каналы связи для осуществления функций РТС, таких как наблюдение и контроль за движениями поезда для обеспечения повышенной безопасности.
[0004] Более конкретно, РТС предусматривает, что поезд получает информацию о своем местоположении и том, где разрешен безопасный проезд, т.е. "команду на движение". Оборудование в поезде улучшает эти команды на движение и при этом препятствует небезопасному движению. Системы РТС часто используют Глобальную Спутниковую Навигационную систему (GPS) для отслеживания движения поезда, или задействуют другой механизм для расчета своего местонахождения. Таким образом, РТС используется для обеспечения интервального регулирования поездов или предотвращения столкновений, контроля максимальной скорости, временного ограничения скорости и гарантии безопасности работников железнодорожного полотна.
[0005] Однако другие различные преимущества могут быть получены в результате использования РТС; например, информация, полученная и проанализированная РТС системой, может разрешить встроенным или внешним системам контролировать поезд и входящий в его состав локомотив для увеличения топливной эффективности и осуществления диагностики локомотива для улучшения защиты. Так как данные, используемые РТС системой, передаются беспроводным способом, другие приложения также могут использовать эти данные.
[0006] Ранее системы обеспечения безопасности движения поезда обозначались как "остановки поезда", что до сих пор используется в различных системах метрополитена. В таких вариантах осуществления, помимо того, что каждый сигнал представляет собой подвижной зажим, который контактирует с клапаном проходящего мимо поезда, если сигнал красный, и открывает тормозную магистраль, таким образом позволяя поезду экстренно затормозить; если сигнал зеленый, зажим развернут в другую сторону и не препятствует движению поезда.
[0007] Другие системы включают в себя систему Integra-Signum, где на поезда оказывается воздействие только в определенном местоположении, например, даже если поезд игнорирует красный сигнал, применяется система экстренного торможения, и двигатели локомотива прекращают работу. Также, такие системы часто требуют, чтобы машинист подтвердил предупредительные сигналы (например, Непрерывная Автоматическая Система Оповещения, CAWS), показывающие знаки "стоп" или "внимание"; если машинист не ответит на сигнал, произойдет остановка поезда. Такой вариант осуществления обеспечивает соответствующую длину тормозного пути для поездов, следующих друг за другом; однако, такие системы на основе подтверждения не всегда предотвращают аварии на станциях, где пересекаются железнодорожные пути, так как расстояние от красного сигнала до следующего препятствия может быть слишком короткое, чтобы поезд успел затормозить до полной остановки.
[0008] Более усовершенствованные системы, например PZB или Indusi, представляют прерывистую локомотивную сигнализацию и систему обеспечения безопасности движения поезда, которая рассчитывает тормозную кривую, которая определяет, остановится ли поезд до следующего красного сигнала, и, если поезд не может этого сделать, тормозит. Один недостаток в этом подходе заключается в том, что если сигнал переключается на зеленый, не допускается ускорение поезда перед сигналом. Для решения этой проблемы, некоторые системы, такие как Linienzugbeeinflussung, разрешают размещение дополнительных магнитов между предупреждающими и проходными сигналами, или непрерывную передачу данных от системы сигнализации на встроенный компьютер.
[0009] Новейшие известные системы обеспечения безопасности движения поезда РТС используют локомотивную сигнализацию, отличающуюся тем, что поезда постоянно получают информацию об их взаимном расположении относительно других поездов. В таких системах встроенные процессоры используют программное обеспечение, показывающее машинисту с какой скоростью он может вести поезд, вместо того, чтобы он полагался на внешние сигналы. Системы такого типа используются повсеместно для высокоскоростных поездов, где скорость поездов затрудняет или не позволяет машинисту прочитать внешние сигналы, а длины составов или расстояний между предупреждающими и проходными сигналами слишком коротки, чтобы поезд мог затормозить.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0010] Рассматриваемые варианты осуществления предлагают способ, где сигналы системы защиты поезда улавливаются и обрабатываются компьютерным алгоритмом, работающим на одном или нескольких процессорах внутри поезда или доступным для системы управления движением поезда, контроля поезда и системы помощи машинисту, чтобы составить команды и инструкции для оптимизации движения поезда. В результате, поезда, контролируемые системой управления движения поезда, контроля поезда и системой помощи машинисту, разработанными в соответствии с рассматриваемыми вариантами осуществления, не нарушают никаких правил системы общей защиты поезда.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0011] Подробное описание, в частности, относится к сопровождающим фигурам, где:
[0012] ФИГ. 1 представляет собой иллюстрацию систему поездов, где путевая система безопасности, например система Автоматического Обеспечения Защиты Движения Поезда, взаимодействует с поездом и его встроенной интеллектуальной системой.
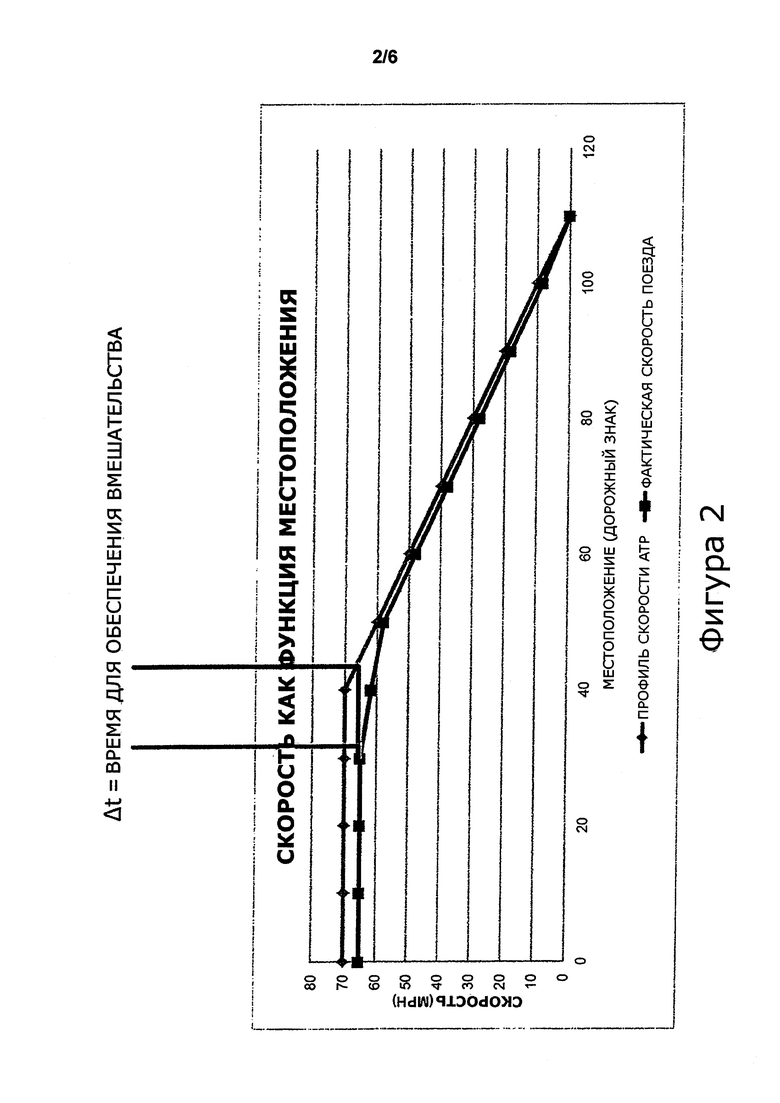
[0013] ФИГ. 2 иллюстрирует профиль скорости системы безопасности и последующий фактический профиль скорости поезда, где сигнал о времени для обеспечения вмешательства используется в соответствии с рассматриваемыми вариантами осуществления.
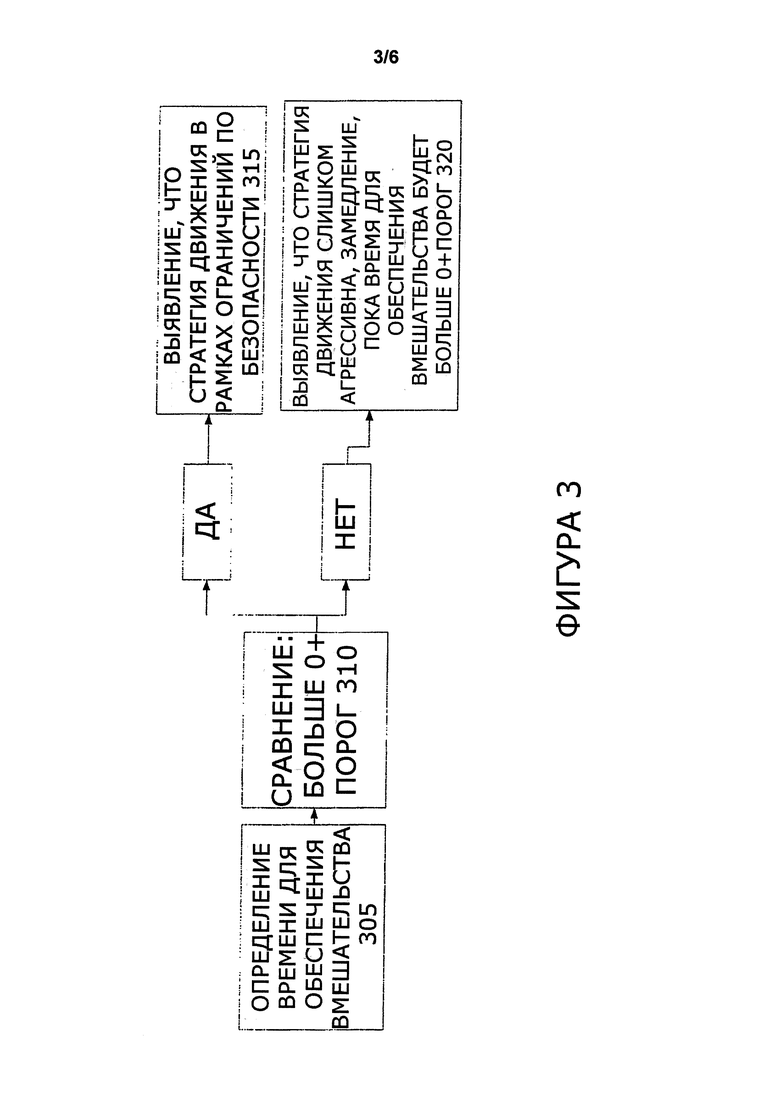
[0014] ФИГ. 3 иллюстрирует операции, представленные для того, чтобы определить, находится ли текущая стратегия движения в пределах безопасности, основываясь на данных, представленных сигналом о времени для обеспечения вмешательства.
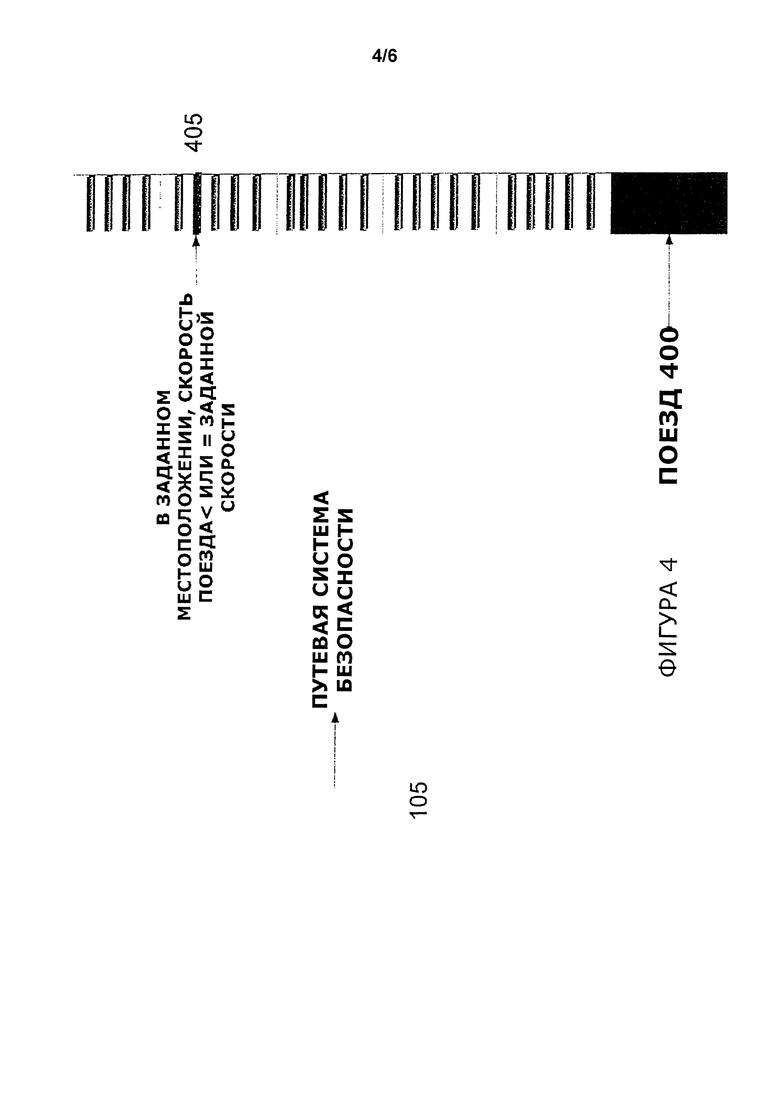
[0015] ФИГ. 4 иллюстрирует то, как реализуются заданная позиция скорости и последующая заданная скорость, когда определена подходящая стратегия движения в соответствии с рассматриваемыми вариантами осуществления.
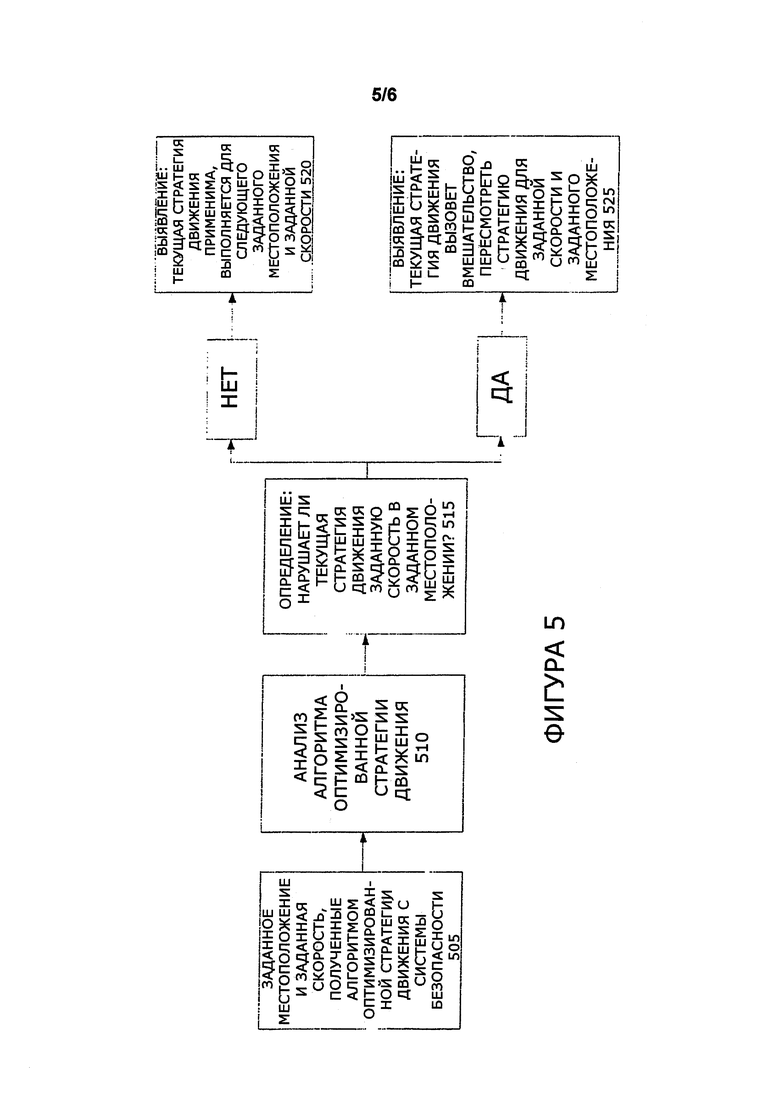
[0016] ФИГ. 5 иллюстрирует данную концепцию с той точки зрения, как использовать заданную позицию и скорость для обеспечения подходящей стратегии движения.
[0017] ФИГ. 6 иллюстрирует вариант устройства, которое может использоваться для обеспечения рассматриваемых вариантов осуществления.
ПОДРОБНОЕ ОПИСАНИЕ
[0018] Рассматриваемые варианты осуществления предлагают способ для обеспечения оптимизации стратегии движения поезда, соответствуя критериям таких систем защиты поезда, как системы Положительного Контроля Движения Поезда (РТС) и "Автоматического Обеспечения Защиты Движения Поезда" (АТР). Должно быть понятно, что настоящие рассматриваемые варианты осуществления могут использоваться вместе с системами АТР и/или другими системами РТС, используемыми во всем мире. Так, любая отсылка к особенностям как АТР, так и РТС системы, только лишь иллюстративна, и не ограничивает практическую ценность настоящих рассматриваемых вариантов осуществления.
[0019] Рассматриваемые варианты осуществления предлагают способ, где сигналы общей системы защиты поезда улавливаются встроенным оборудованием поезда и обрабатываются компьютерными алгоритмами, работающими на одном или нескольких встроенных процессорах, расположенных в поезде, и включенных в систему управления поездом, контроля поезда и систему помощи машинисту (например, коммерчески доступные системы марки New York Air Brake торговой марки "LEADER"). Сигналы защиты поезда обрабатываются и используются для составления команд и инструкций для оптимизации движения поезда, они создаются и выдаются системой управления поездом, контроля поезда и системой помощи машинисту. В результате поезда, контролируемые системой управления движения поезда, контроля поезда и системой помощи машинисту, разработанными в соответствии с рассматриваемыми вариантами осуществления, не нарушают никаких правил системы общей защиты поезда.
[0020] Рассматриваемые варианты изобретения могут применяться для увеличения возможности улучшить безопасность с помощью стратегии вождения поезда, где используются путевые сигналы, соответствующей требованиям Системы "Автоматического Обеспечения Защиты Движения Поезда" (АТР). Таким образом, путевые сигналы улавливаются системой управления поездом, контроля поезда и системой помощи машинисту.
[0021] Известные системы путевого сигнализирования, используемые общими системами безопасности, служат для контроля скорости поезда и указания маршрутов поезда, с помощью прочного путевого оборудования, через ламповое сигнализирование. Однако существует ряд установленных различных правил, требующих беспроводную передачу таких сигналов на поезда через, например, РТС. Более конкретно, используя РТС, путевая система антенн может быть использована для передачи данных с различных частей используемого оборудования, например, рельсовых цепей, ламп и т.д., в виде цифрового сигнала на поезд, и, более конкретно, на один или несколько локомотивов поезда, где работает система управления поездом, контроля поезда и система помощи машинисту, представленная с функционалом настоящих рассматриваемых вариантов осуществления.
[0022] Соответственно, рассматриваемые варианты осуществления предлагают систему управления поездом, контроля поезда и систему помощи машинисту, которые получают сведения о данных, предупреждениях и направлении с путевой системы безопасности, помимо того, что данная информация может быть визуально представлена машинисту.
[0023] Если машинист не в состоянии выполнить задачу, рекомендуемую, указанную или требуемую общей системой безопасности, система управления поездом, контроля поезда и система помощи машинисту могут принудительно выполнить задачу для обеспечения безопасности. Дополнительно, при возможности системы управления поездом, контроля поезда и системы помощи машинисту доступа к информации, показывающей данные, предупреждения и направление с путевой системы безопасности, система управления поездом, контроля поезда и система помощи машинисту может принять эти данные во внимание, предлагая оптимизированное направление движения поезда.
[0024] Например, как показано на ФИГ. 1, внутри системы железнодорожных путей 100, поезд 105 может идти по пути, включающему различные маршруты. Рассматриваемые варианты осуществления реализуют связь между сигналами с помощью системы антенн 110 для улавливания информации, которая создается и сохраняется в путевой системе безопасности.
[0025] Известные системы путевого сигнализирования, используемые общими системами безопасности, служат для контроля скорости поезда и указания маршрутов поезда, с помощью прочного путевого оборудования, через ламповое сигнализирование. Однако, существует ряд установленных различных правил, требующих беспроводную передачу таких сигналов на поезда через, например, РТС. Более конкретно, используя РТС, путевая антенна 115 на ФИГ. 1 передает данные с различных частей используемого оборудования, например, рельсовых цепей, ламп и т.д., в виде цифрового сигнала на поезд 105, и, более конкретно, на один или несколько локомотивов поезда, где работает система управления поездом, контроля поезда и система помощи машинисту, представленная с функционалом настоящих рассматриваемых вариантов осуществления.
[0026] Соответственно, рассматриваемые варианты осуществления предлагают систему управления поездом, контроля поезда и систему помощи машинисту, которые получают сведения о данных, предупреждениях и направлении с путевой системы безопасности, помимо того, что данная информация может быть визуально представлена машинисту.
[0027] Если машинист не в состоянии выполнить задачу, рекомендуемую, указанную или требуемую общей системой безопасности, система управления поездом, контроля поезда и система помощи машинисту могут принудительно выполнить задачу для обеспечения безопасности. Дополнительно, при возможности системы управления поездом, контроля поезда и системы помощи машинисту доступа к информации, показывающей данные, предупреждения и направление с путевой системы безопасности, система управления поездом, контроля поезда и система помощи машинисту может принять эти данные во внимание, предлагая оптимизированное направление движения поезда.
[0028] Как показано на ФИГ. 1, под управлением системы АТР 100, поезд 105 может идти по пути, включающему различные маршруты. Рассматриваемые варианты осуществления используют сигналы, полученные с системы антенн 110 (включая путевую антенну и антенну, встроенную или соединенную с системой управления поездом, контроля поезда и системой помощи машинисту 115). В этом случае, система управления поездом, контроля поезда и система помощи машинисту 115, размещенная в поезде 105, может улавливать информацию, созданную и сохраненную системой АТР.
[0029] Обычные системы путевого сигнализирования, используемые общими системами безопасности, служат для контроля скорости поезда и указания маршрута поезда с помощью прочного путевого оборудования через ламповое сигнализирование. Однако существует ряд установленных различных правил, требующих беспроводную передачу таких сигналов на поезда через, например, РТС. Более конкретно, используя РТС, система антенн 110 на ФИГ. 1 позволяет передавать и получать данные с различных частей используемого оборудования, например рельсовых цепей, ламп и т.д., в виде цифрового сигнала на поезд 105, и, более конкретно, на один или несколько локомотивов поезда 105, где работает система управления поездом, контроля поезда и система помощи машинисту 115, представленная с функционалом настоящих рассматриваемых вариантов осуществления.
[0030] Соответственно, рассматриваемые варианты осуществления предлагают систему управления поездом, контроля поезда и систему помощи машинисту, которые получают сведения о данных, предупреждениях и направлении с путевой системы безопасности, даже несмотря на то что данная информация может быть представлена визуально машинисту.
[0031] Если машинист не в состоянии выполнить задачу, рекомендуемую, указанную или требуемую общей системой безопасности, система управления поездом, контроля поезда и система помощи машинисту могут принудительно выполнить задачу для обеспечения безопасности. Дополнительно, при возможности системы управления поездом, контроля поезда и системы помощи машинисту доступа к информации, показывающей данные, предупреждения и направление с путевой системы безопасности, система управления поездом, контроля поезда и система помощи машинисту может принять эти данные во внимание, предлагая оптимизированное направление движения поезда.
[0032] Рассматриваемые варианты осуществления предлагают способ, позволяющий оптимизировать стратегию движения поезда, будучи под колпаком безопасности Системы АТР или другой такой же системы. Для того чтобы сделать это, сигналы Системы АТР улавливаются системой управления поездом, контроля поезда и системой помощи машинисту и учитываются алгоритмами, работающими в системе управления поездом, контроля поезда и системе помощи машинисту, которая контролирует или предлагает рекомендации или указания машинистам поездов, так что поезд не нарушает никаких правил по общей системе безопасности, в то время как рекомендации или применения оптимизированной стратегии движения сокращают расход топлива, повышают безопасность и т.д.
[0033] Для эффективной работы системе необходимо избегать вмешательств, вызванных системой АТР. Система АТР эффективно отслеживает местоположение поезда и гарантирует, что поезд не проходит свой Предел полномочий (LOA), что представляет собой самое дальнее местоположение на текущем маршруте, до которого поезд намеревается дойти. Дополнительно, система АТР также проверяет, что поезд не превышает никакие ограничения по скорости на всем протяжении сети путей. Если поезд превышает параметры системы АТР, система АТР может активировать либо штрафное включение тормоза для замедления хода поезда, либо экстренное вмешательство, в зависимости от обстоятельств.
[0034] Рассматриваемые варианты осуществления предлагают по крайней мере два способа, которые дополняют данную характеристику.
[0035] В первом способе рассматриваемого варианта осуществления сигнал "время для обеспечения вмешательства" предоставляется системой защиты поезда, например системой РТС или системой АТР. Этот сигнал, наряду с другими типами сигналов, передается с путевой сигнальной антенны (включенной в систему сигнальных антенн 110), расположенной рядом с путем, по которому следует поезд. Эта передача принимается антенной на поезде (включенной в систему сигнальных антенн 110) и обрабатывается системой управления поездом, контроля поезда и системой помощи машинисту 115 для определения оптимизированной стратегии движения поезда. Более конкретно, оптимизированная стратегия движения поезда осуществляется механизмом стратегии движения 135, который основан на различных данных, включая, например, текущую динамику движения поезда 120, прогнозированные данные о динамике движения поезда 125 и данные о времени для обеспечения вмешательства, которые включены в передаваемый сигнал, посылаемый системой безопасности (например, АТР, РТС или другой такой же системы) 100.
[0036] Время для обеспечения вмешательства представляет собой единицу времени, при текущей скорости поезда, с которой система управления поездом, контроля поезда и система помощи машинисту могут применять прекращение действий или штрафное торможение для изменения действий поезда.
[0037] ФИГ. 2 иллюстрирует профиль скорости системы безопасности (например, Профиль Скорости АТР) и последующий фактический профиль скорости поезда (Фактическая Скорость Поезда). Сигнал о времени для обеспечения вмешательства включает в себя время для обеспечения вмешательства, рассчитанное как разница во времени (Δt), до того как фактический профиль скорости поезда нарушает профиль скорости системы безопасности.
[0038] ФИГ. 3 иллюстрирует операции, представленные для того, чтобы определить, находится ли текущая стратегия движения в пределах безопасности, основываясь на данных, представленных сигналом о времени для обеспечения вмешательства. Как показано в ФИГ. 3, фрагмент 305, определение осуществляется в соответствии со временем для обеспечения вмешательства, основываясь на переданном сигнале с системы безопасности на систему управления поездом, контроля поезда и систему помощи машинисту; в реализации это определение может основываться только лишь на данных, полученных с сигнала о времени для обеспечении вмешательства, полученного с путевой системы безопасности.
[0039] На фрагменте 310 определяется, является ли время для обеспечения вмешательства больше нуля плюс пороговое значение. Эта пороговое значение представляет собой настраиваемый параметр и измеряется в секундах; при возможности настроить значение машинист поезда или системы АТР имеет возможность улучшить степень безопасности во избежание обеспечения вмешательства, которое могло произойти, то есть установка меньшего числа допускает больший риск в стратегии движения, так как предоставляет меньший "буфер" в обработке. Так, ясно, что целью является избежать обеспечения вмешательства АТР, увеличив буфер между принятой стратегией и точкой обеспечения вмешательства, что теоретически сокращает риск такого вмешательства. Также снижение буфера или порогового значения дает возможность системе работать более энергично и предлагать стратегии, которые ближе к точке активизации обеспечения вмешательства.
[0040] Если при сравнении выявляется, что время для обеспечения вмешательства больше, чем пороговое значение, тогда производится определение того, что стратегия движения находится в рамках ограничений по безопасности. Соответственно, выявление этого факта показано на фрагменте 315. Однако, если при сравнении выявляется, что время для обеспечения вмешательства меньше, чем пороговое значение, тогда производится определение того, что стратегия движения не находится в рамках ограничений по безопасности. Соответственно, выявление этого факта показано на фрагменте 320. Эти выявления могут применяться просто как данные, вводимые в алгоритмы программного обеспечения в системе управления поездом, контроля поезда и системе помощи машинисту, и работают как двойная проверка или подтверждение того, что используемая в настоящий момент стратегия движения оптимальна, и можно избежать обеспечения вмешательства путевой системы безопасности. С другой стороны, данные могут использоваться другими приложениями и/или выдаваться машинисту поезда или передаваться на общую систему безопасности каким-либо способом для обеспечения или выявления рассмотренных требований, или в соответствии с требованиями системы.
[0041] Во втором способе рассматриваемого варианта осуществления устанавливаются и применяются заданная позиция скорости и последующая заданная скорость. [0036] Более конкретно, как показано на ФИГ. 4, путевая система безопасности передает заданную скорость и местоположение заданной скорости 405 на поезд 400 с помощью системы антенн 110; таким образом, антенна путевой системы безопасности передает эти данные на антенну, расположенную на поезде или встроенную в систему управления поездом, контроля поезда и систему помощи машинисту поезда. Система управления поездом, контроля поезда и система помощи машинисту использует переданное значение скорости в качестве максимальной разрешенной скорости в заданном местоположении 405, то есть заданной позиции скорости. Система управления поездом, контроля поезда и система помощи машинисту использует функцию предвидения "Look Ahead", чтобы сделать прогноз относительно различных параметров, включая скорость поезда и заданной позиции. Система управления поездом, контроля поезда и система помощи машинисту также определяет другие различные изменения поезда, включая ускорение, тормозные силы и внутрипоездные силы, установленные текущими настройками поезда (то есть, настройками тормоза, реостатного тормоза и пневматического тормоза) и их последующее сравнение с параметрами пути (то есть, указаниями по ограничениям скорости и параметрами движения системы безопасности). В этом случае, система управления поездом, контроля поезда и система помощи машинисту имеет возможность также гарантировать, что настоящая используемая стратегия движения поезда находится в рамках ограничений по безопасности.
[0042] ФИГ. 5 иллюстрирует данную концепцию с той точки зрения, как использовать заданную позицию и скорость для обеспечения подходящей стратегии движения. Как показано в ФИГ. 5, заданное местоположение и заданная скорость в данном местоположении получены алгоритмом оптимизированной стратегии движения (частью системы управления поездом, защиты поезда и системы помощи машинисту) с системы безопасности 505. Эти данные получены через систему антенн. Затем алгоритм оптимизированной стратегии движения обрабатывает данные и использует их в качестве максимальной разрешенной скорости для сравнения с прогнозом программы Look Ahead на фрагменте 510. В результате, на фрагменте 515 производится определение, нарушает ли текущая стратегия движения заданную скорость в заданном местоположении.
[0043] Если нет, тогда производится определение того, что стратегия движения находится в рамках ограничений по безопасности. Соответственно, выявление этого факта показано на фрагменте 520. Однако, если при сравнении выявляется, что скоростной максимум будет превышен текущей стратегией движения, тогда производится определение того, что стратегия движения не находится в рамках ограничений по безопасности. Соответственно, выявление этого факта показано на фрагменте 525. Эти выявления могут применяться просто как данные, вводимые в алгоритмы программного обеспечения в системе управления поездом, контроля поезда и системе помощи машинисту, и работают как двойная проверка или подтверждение того, что используемая в настоящий момент стратегия движения оптимальна, и можно избежать обеспечения вмешательства путевой системы безопасности. С другой стороны, данные могут использоваться другими приложениями и/или выдаваться машинисту поезда или передаваться на общую систему безопасности каким-либо способом для обеспечения или выявления рассмотренных требований, или в соответствии с требованиями системы.
[0044] Рассматриваемые варианты осуществления могут быть реализованы совместно с различными системами управления поездом, контроля поезда и системами помощи машинисту и их компонентами. Таким образом, должно быть понятно, что рассматриваемые варианты могут быть включены в систему управления поездом, контроля поезда и систему помощи машинисту, например, модуля системы РТС, который может включать аппаратное оборудование, программное обеспечение, встроенное ПО или какие-либо их комбинации, которые предусматривают индикацию скорости, регулятор скорости, по крайней мере либо на локомотиве, либо на поезде, компонент, который динамически информирует регулятор скорости об изменении маршрута или состояний сигнала, и встроенную навигационную систему и базу данных профиля маршрута, применяемых для обеспечения установленных пределов скорости на всем маршруте следования поезда, связь в диалоговом режиме, настроенную для того, чтобы информировать сигнальное оборудование о наличии поезда так, чтобы поддерживать связь с центральными системами РТС, которые настроены на прямой результат команды на движение поездам.
[0045] Таким образом, вышеуказанные параметры могут применяться в различных комбинациях вышеуказанного аппаратного оборудования, программного обеспечения и встроенного ПО. Соответственно, чтобы осуществить данные типы задач, интеллектуальная система поезда, созданная для осуществления этих задач, может включать (но не ограничиваясь) оборудование, изображенное на ФИГ. 6. Как показано в этой фигуре, интеллектуальная система поезда 600 может присутствовать в поезде 105 (показано в ФИГ. 1). Относительно реализации, интеллектуальная система поезда 600 может включать один или несколько компьютерных блоков обработки данных 605, которые могут быть соединены с памятью 610 (применяемой в качестве общеизвестных и коммерчески доступных программируемых и/или доступных только для чтения или перепрограммированных устройств памяти). Память 610 может служить для хранения компьютерных инструкций, связанных с или реализующих и контроль программного обеспечения 615 и операционной системы, или окружающей среды 620 для предоставления задач, включенных в одно или несколько компьютерных приложений, и закодированный пакет программного обеспечения и/или различные названные или включенные подпрограммы. Эти инструкции могут использоваться для осуществления инструкций, включенных в способы и определения, описанные выше.
[0046] Более того, интеллектуальная система поезда может также включать один или несколько коммуникационных портов 625, что позволяет и принимать, и передавать сообщения и сигналы (такие как сигналы, полученные с придорожных ретрансляторов), данные и диспетчерские команды в соответствии с рассматриваемыми вариантами осуществления. Далее, интеллектуальная систем поезда 600 может включать человеко-машинный интерфейс 630, который может включать, например, дисплей, позволяющий оператору получать и просматривать данные, используемые или выработанные интеллектуальной системой поезда 600, предоставлять инструкцию или вводить указания для контроля над программным обеспечением 615, получать доступ к данным, включенным в память 610, и т.д. В результате, человеко-машинный интерфейс 630 может также включать другие общеизвестные характеристики, включая клавиатуру, мышь, сенсорную панель, различные кнопки и переключатели и т.д.
| название | год | авторы | номер документа |
|---|---|---|---|
| Описание схемы параллельных путей | 2013 |
|
RU2676597C2 |
| Устройство контроля за управлением локомотивом и бдительностью машиниста | 2021 |
|
RU2766936C1 |
| Динамически измеряемая распределенная гетерогенная платформа реляционной базы данных | 2013 |
|
RU2639940C2 |
| СИСТЕМА И СПОСОБ ДЛЯ ОПТИМИЗАЦИИ РАБОТЫ ПОЕЗДА С УЧЕТОМ ПАРАМЕТРОВ ВАГОНА | 2007 |
|
RU2605648C2 |
| Система автоматизированного регулирования скорости локомотива в зоне сближения с неохраняемыми и необслуживаемыми переездами | 2018 |
|
RU2696046C1 |
| Устройство контроля за управлением локомотивом | 2022 |
|
RU2790738C1 |
| ЦЕНТРАЛЬНАЯ УПРАВЛЯЮЩАЯ СИСТЕМА КОНТРОЛЯ БЕЗОПАСНОСТИ И СВЯЗИ ПАССАЖИРСКОГО ПОЕЗДА | 2009 |
|
RU2405699C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ И УСТРОЙСТВО КОНТРОЛЯ СОСТОЯНИЙ ПУТЕВЫХ УЧАСТКОВ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2739086C1 |
| СИСТЕМА И СПОСОБ ДЛЯ ОПТИМИЗАЦИИ РАБОТЫ ПОЕЗДА С УЧЕТОМ ПАРАМЕТРОВ ВАГОНА | 2007 |
|
RU2470814C2 |
| СИСТЕМА ПЕРЕДАЧИ ОТВЕТСТВЕННОЙ ИНФОРМАЦИИ ОТ ПОСТОВОЙ АППАРАТУРЫ В БОРТОВЫЕ УСТРОЙСТВА БЕЗОПАСНОСТИ | 2015 |
|
RU2582323C1 |


Изобретение относится к области железнодорожной автоматики и телемеханики для управления движением поездом. Навигационная система поезда включает систему управления поездом для встраивания в поезд и установления стратегии движения поезда, система управления поезда включает процессор и антенну, соединенную с процессором для приема сигнала защиты поезда, содержащий время для обеспечения вмешательства с придорожного ретранслятора. Причем процессор запрограммирован на определение того, соответствует ли стратегия движения поезда сигналу защиты поезда при приеме антенной от придорожного ретранслятора. Достигается повышение безопасности движения поездов. 2 н. и 15 з.п. ф-лы, 6 ил.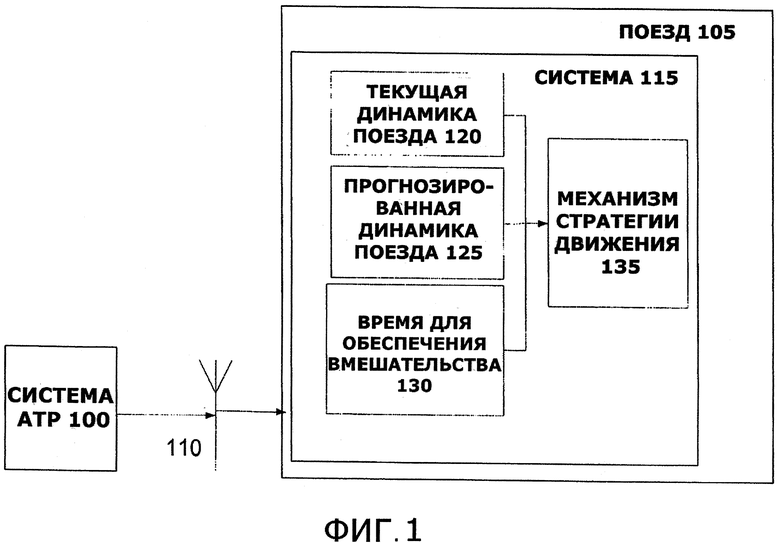
1. Навигационная система поезда, которая включает:
систему управления поездом для встраивания в поезд и установления стратегии движения поезда, причем система управления поезда включает процессор и антенну, соединенную с процессором для приема сигнала защиты поезда, содержащий время для обеспечения вмешательства с придорожного ретранслятора;
где процессор запрограммирован на определение того, соответствует ли стратегия движения поезда сигналу защиты поезда при приеме антенной от придорожного ретранслятора.
2. Навигационная система поезда по п. 1, отличающаяся тем, что если процессором определено, что стратегия движения поезда не соответствует сигналу защиты поезда, принятому от придорожного ретранслятора, процессор дополнительно запрограммирован на активацию включения тормоза.
3. Навигационная система поезда, по п. 1, отличающаяся тем, что сигнал защиты поезда содержит время для обеспечения вмешательства.
4. Навигационная система поезда по п. 3, отличающаяся тем, что сигнал о времени для обеспечения вмешательства представляет собой единицу времени, при текущей скорости поезда, с которой система управления поездом должна применять прекращение действий или штрафное торможение для изменения действий поезда.
5. Навигационная система поезда по п. 3, отличающаяся тем, что процессор запрограммирован на определение того, больше ли время для обеспечения вмешательства, чем нулевое значение плюс пороговое значение, измеряемое в секундах.
6. Навигационная система поезда по п. 1, отличающаяся тем, что сигнал защиты поезда содержит данные о заданной скорости и заданном местоположении скорости.
7. Навигационная система поезда по п. 6, отличающаяся тем, что процессор запрограммирован на вычисление прогноза скорости поезда в заданном местоположении на основе стратегии движения и на определение того, превышает ли прогноз заданную скорость в заданном местоположении скорости.
8. Навигационная система поезда по п. 1, отличающаяся тем, что процессор определяет местоположение поезда, используя данные Глобальной Спутниковой Системы.
9. Навигационная система поезда по п. 1, которая также включает интерфейс пользователя, соединенный с процессором, где процессор запрограммирован на составление и выдачу рекомендации по управлению поездом машинисту поезда через интерфейс пользователя.
10. Навигационная система поезда по п. 9, отличающаяся тем, что рекомендация по управлению поездом принимает к сведению ограничения по скорости на приближающихся участках пути согласно с текущим профилем пути.
11. Способ управления поездом, способ включает этапы:
обеспечения системы управления поездом для встраивания в поезд и установления стратегии движения поезда, причем система управления поезда включает процессор и антенну, соединенную с процессором для приема сигнала, содержащего сигнал защиты поезда, от придорожного ретранслятора, где процессор запрограммирован на определение того, соответствует ли стратегия движения поезда любому сигналу защиты поезда, принятому от придорожного ретранслятора, где сигнал защиты поезда содержит время для обеспечения вмешательства, которое обрабатывается процессором совместно с текущей динамикой движения поезда и прогнозированными данными о динамике движения поезда для определения оптимизированной стратегии движения;
получение сигнала, содержащего сигнал защиты поезда, от придорожного ретранслятора;
определение того, соответствует ли стратегия движения поезда сигналу защиты поезда, принятого от придорожного ретранслятора, вызывая изменение стратегии движения поезда, если стратегия движения поезда не соответствует сигналу защиты поезда, принятому с придорожного ретранслятора, так что обеспечение прерывания не активизируется по правилам системы защиты поезда.
12. Способ по п. 11, отличающийся тем, что если стратегия движения поезда не соответствует сигналу защиты поезда, процессор запрограммирован на активацию штрафного включения тормоза для замедления хода поезда или экстренного вмешательства.
13. Способ по п. 11, отличающийся тем, что сигнал защиты поезда содержит время для обеспечения вмешательства, который обрабатывается процессором совместно с текущей динамикой движения поезда и прогнозированными данными о динамике движения поезда для того, чтобы определить оптимизированную стратегию движения.
14. Способ по п. 13, отличающийся тем, что время для обеспечения вмешательства является мерой времени, при текущей скорости поезда, при которой система управления поездом должна применять вмешательство или штрафное торможение для изменения задачи поезда.
15. Способ по п. 13, отличающийся тем, что процессор запрограммирован на определение того, больше ли время для обеспечения вмешательства, чем нулевое значение плюс пороговое значение, измеряемое в секундах.
16. Способ по п. 13, отличающийся тем, что сигнал защиты поезда содержит данные о заданной скорости и заданном местоположении скорости.
17. Способ по п. 16, отличающийся тем, что процессор запрограммирован на вычисление прогноза скорости поезда в заданном местоположении на основе стратегии движения и на определение того, превышает ли прогноз заданную скорость в заданном местоположении скорости.
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |

