Система автоматизированного регулирования скорости локомотива в зоне сближения с неохраняемыми и необслуживаемыми переездами
Предполагаемая система относится к области железнодорожного транспорта и может быть использована в составе комплексного локомотивного устройства безопасности в локомотиве подвижного состава.
Из уровня техники известен безопасный локомотивный объединенный комплекс (патент на изобретение RU 2474507 С2 МПК B61L 25/04, опубликовано: 10.02.2013). Здесь предусматривается функция автоматического прицельного служебного торможения перед местом препятствия (переезд, граница блок-участка и т.п.). Эта функция реализуется на основе использования информации о текущей скорости и ординате поезда в зоне автоматического торможения, которая поступает от локомотивного электромеханического датчика пути и скорости. Кроме этого в состав системы входят: вычислитель системы автоматического управления торможением и модуль центрального обработчика. Вычислитель системы обеспечивает высисление программной кривой автоматического регулирования скорости в зоне сближения с препятствием с учетом плана и профиля пути в данной зоне и коэффициента сцепления «колесо-рельс». В модуле центрального обработчика производится сравнение фактической скорости движения поезда с программной скоростью в данной ординате пути в зоне сближения с препятствием. В случае обнаружения недопустимого отклонения между фактической и программной скоростью в модуле центрального обработчика формируется одна из двух команд: команда экстренного торможения или команда служебного торможения, которые далее отрабатываются исполнительными механизмами тормозной системы локомотива.
Модуль спутниковой навигационной системы с электронной картой пути также входит в состав безопасного локомотивного объединенного комплекса. Информация об измеренных радионавигационных и навигационных параметрах, полученная с помощью этого модуля, фактически используется только для индикации факта проследования путевых ординат объектов, которые зафиксированы в электронной карте, на табло машиниста, а также для оценки текущего времени при контроле исполненного графика движения. Информация с выхода модуля спутниковой навигационной системы не используется в процессе автоматического регулирования скорости движения в зоне сближения с препятствием.
Таким образом, недостатками указанного комплекса являются:
- аппаратура ГЛОНАСС/GPS (т.е. модуль спутниковой навигационной системы) не используются собственно в процессе автоматического регулирования скорости и оценки зоны автоматического торможения;
- высокая стоимость серийного оборудования локомотивов (по состоянию на настоящее время системой БЛОК оборудованно 1500 единиц локомотивов из 16000).
Известно технического решение - устройство предупреждения столкновения поездов и подобных транспортных систем (патент на изобретение RU 2 333 860 С2 МПК B61L 27/00, опубликовано: 20.09.2008), в котором с поезда производится автоматическая подача звукового сигнала в сторону переезда для оповещения о приближающемся поезде. Изобретение содержит устройство центрального процессора в виде блока контроля и управления, приемник со спутниковой антенной для приема сигналов глобальной системы позиционирования GPS, интерфейс локомотивной бригады требуемой мощности и диапазона с направленной антенной и системой ввода/вывода, устройство включения тормозного механизма, связанное с тормозным механизмом для управления скоростью локомотива, устройство отображения сообщений, имеющее средство аудио- и (или) визуальной сигнализации, и систему питания, предпочтительно состоящую из аккумуляторной батареи и трансформатора, все блоки и устройства системы функционально взаимосвязаны.
Данное техническое решение предполагает установку устройств предупреждения столкновений в локомотиве и тормозном вагоне, а также установку устройства предупреждения столкновений на переезде. Функция предупреждения столкновений реализуется за счет взаимодействия указанных устройств по радиоканалу с передачей необходимых команд управления в исполнительную часть тормозной системы поезда. Приемник сигналов спутниковой навигационной системы GPS с антенной используется для получения информации об исполненном графике движения, фактическом расстоянии между локомотивами разных поездов и если обнаружено движение локомотивов по одному пути, то указанная информация используется для автоматического аудио-визуального оповещения машинистов об опасной ситуации и автоматического включения торможения.
Недостатком этого технического решения является то, что предполагается использование дополнительно устройств предупреждения столкновения на охраняемых и неохраняемых переездах, что приводит к дополнительным нерациональным затратам на обслуживание объектов инфраструктуры на переездах.
Известен сигнально-контролирующий комплекс железнодорожного переезда (патент на полезную модель РФ №119 314, МПК B61L 29/00, опубликовано: 20.08.2012). Комплекс состоит из предупреждающего знака, видеокамер и опор горизонтальных красных огней, с дополнительно установленными вертикальными желтым и зелеными огнями в качестве заграждающе-предупредительных и контролирующих устройств со стороны автодороги. Комплекс обеспечивает безопасность движения через переезд за счет увеличения бдительности водителей транспортных средств.
Недостатками являются: высокая степень влияния субъективного фактора на безопасность движения на переезде; невозможность автоматизации контроля скорости подвижного состава при приближении к переезду; затраты на установку и обслуживание опор переездных светофоров на неохраняемых и необслуживаемых переездах.
Известна система защиты железнодорожных переездов (патент на полезную модель РФ №134889, МПК B61L 29/00, опубликовано: 27.11.2013). Система состоит из переездных светофоров, системы электромеханических заграждающих устройств, блока обнаружения препятствий, локомотивного речевого информатора, напольного громкоговорителя, путевой коробки и видеокамеры.
Недостатками являются: затраты на оборудование переезда системой контролирующих и заграждающих устройств и путевых датчиков, невозможность предотвращения тяжелых последствий при выезде автотранспорта на переезд с застреванием на путях; невозможность реализации автоматического регулирования скорости подвижного состава на участке приближения к переезду; высокая степень влияния субъективного фактора на безопасность движения на переезде.
Известен электротехнический комплекс для предупреждения аварийных ситуаций на железнодорожных переездах (патент на полезную модель РФ №94202, МПК B61L 29/00, опубликовано: 20.05.2010). Комплекс состоит из видеокамер с блоком обработки изображения с шумоподавлением для фиксации наличия (отсутствия) препятствия на переезде и для оценки ожидаемого времени вступления автотранспортного средства на переезд, блока управления переездной сигнализацией, блока регистрации поезда для определения скорости поезда и ожидаемого времени его вступления на переезд, блока анализа ситуации, в котором оценивается степень опасности текущей ситуации в зоне переезда и передатчика. Кроме этого комплекс дополнен локомотивными устройствами: приемником сигналов от переездной части, тремя светоиндикаторами предупредительной заградительной сигнализации (зеленый - переезд свободен, желтый - рекомендовано снижение скорости и красный - экстренное торможение перед переездом) и блоком регистрации аварийных ситуаций.
Недостатками являются: техническая сложность и высокая стоимость комплекса, что делает нецелесообразным его использование на неохряняемых и необслуживаемых переездах; недостаточный уровень безопасности движения в зоне переезда, как для автотранспорта, так и для подвижного состава; высокое влияние субъективного фактора на безопасность движения в зоне переезда; отсутствие функции автоматизации процесса регулирования скорости движения поезда на участке приближения к переезду.
Из представленных полезных моделей, следует вывод, что указанные методы и способы обеспечения безопасности на переездах имеют ряд общих недостатков: высокая степень влияния субъективного фактора на безопасность движения на переезде; отсутствие функции автоматизации регулирования скорости подвижного состава при приближении к переезду; большие затраты на установку и обслуживание дополнительных устройств и систем на неохраняемых и необслуживаемых переездах.
Наиболее близким по техническим решениям, выбранным в качестве прототипа, использовано последнее (патент на полезную модель РФ №134889, МПК B61L 29/00, опубликовано: 27.11.2013), поскольку в нем заложен принцип переноса основной ответственности за процесс регулирования скорости движения в зоне переезда с пути на локомотив. Это потенциально может быть использовано для снижения затрат на оборудование неохраняемых переездов и в то же время автоматизировать процесс регулирования движения в зоне переезда со снижением степени влияния субъективного фактора на безопасность движения на неохраняемых и необслуживаемых переездах.
Задача предлагаемой системы автоматизированного регулирования скорости локомотива в зоне сближения с неохраняемыми и необслуживаемыми переездами заключается в обеспечении безопасности движения на нерегулируемых и необслуживаемых переездах, за счет автоматизированного снижения скорости подвижного состава на участке приближения к переезду, в зависимости от текущей ситуации на переезде, без установки на переезде дополнительных устройств, за счет использования средств спутниковой радионавигационной системы.
Указанная задача решается следующим образом.
Система автоматизированного регулирования скорости локомотива в зоне сближения с неохраняемыми и необслуживаемыми переездами, включает в себя блок памяти, в котором хранится цифровая карта пути, с ординатами переездов и контрольных точек на участке приближения к переезду, программу автоматического регулирования скорости, аппаратуру спутниковой радионавигационной системы ГЛОНАСС/GPS, с помощью которой определяют текущую путевую ординату и скорость, и блок управления, формирующий аналоговый сигнал управления для исполнительного механизма тормозной системы поезда; функция обеспечения безопасности движения через переезд полностью реализуется на локомотиве через блок управления путем автоматизированного снижения скорости на участке приближения к переезду до безопасного уровня на основе использования путевой ординаты и скорости, определенных с помощью аппаратуры ГЛОНАСС/GPS; используется подача автоматического звукового сигнала в сторону переезда, с проверкой контроля бдительности машиниста, и переход в полуавтоматический режим ведения локомотива в зоне прямой видимости переезда, с учетом фактической ситуации на переезде и принятием окончательного ситуационного решения машинистом в зоне переезда.
Предложенную систему поясняют чертежи.
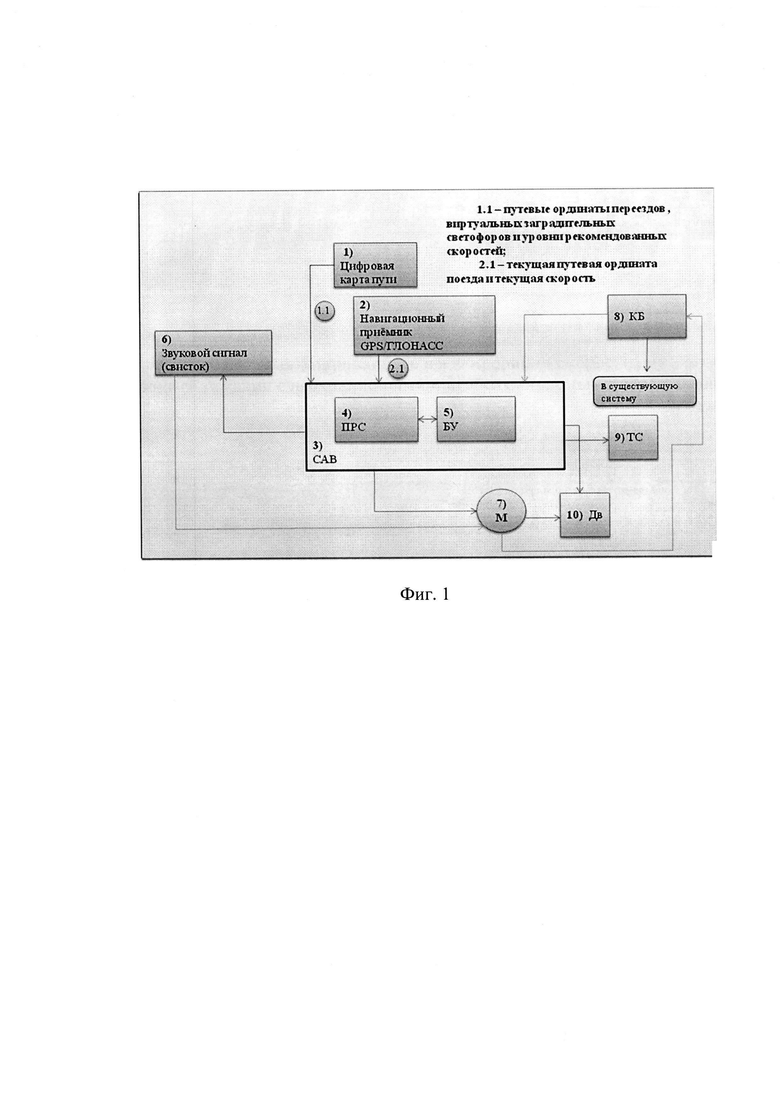
На фиг. 1 представлена блок-схема последовательного функционирования системы автоматизированного регулирования скорости. На фиг. 1 обозначено: 1)- цифровая карта пути, включающая в себя 1.1 - путевые ординаты переездов, виртуальных заградительных светофоров и уровни рекомендованных скоростей; 2) навигационный приемник GPS - ГЛОНАСС, включающий в себя 2.1 текущие путевые ординаты поезда и его текущую скорость; 3) система автоведения; 4) программа регулирования скорости; 5) блок управления; 6) звуковой сигнал (свисток); 7) машинист локомотива; 8) контроль бдительности; 9) тормозная система; 10) двигатель локомотива.
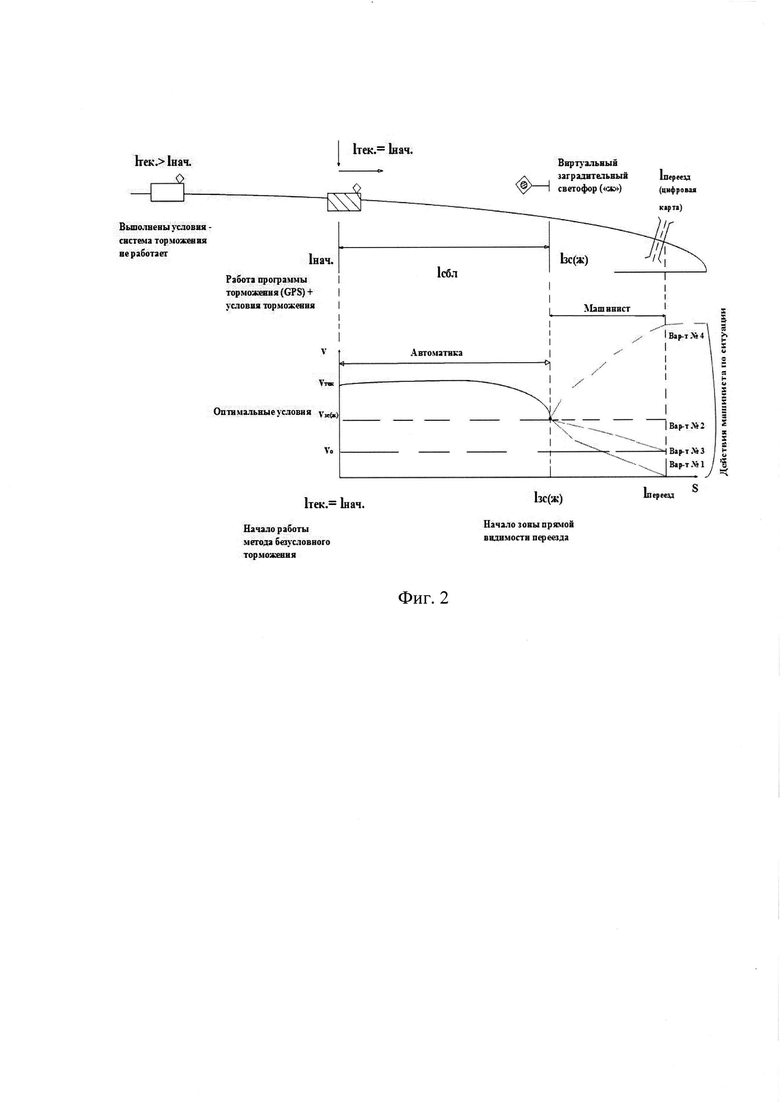
На фиг. 2 показана схема движения локомотива к переезду с графиком изменения скорости подвижного состава. На фиг. 2 обозначено: - текущая путевая ордината подвижного состава; - начальная ордината подвижного состава; - - зона сближения с переездом; - - зона прямой видимости переезда; график регулирования скорости подвижного состава под действием автоматики и машиниста; варианты регулирования скорости, в зависимости от ситуации на переезде.
Объекты инфраструктуры и железнодорожные пути, а также зоны сближения с переездами и контрольные точки регулирования и снижения скорости переносятся на цифровую карту пути 1, которая хранится в блоке памяти системы автоматического регулирования скорости 3. Текущая путевая ордината поезда и скорость его движения оценивается в непрерывном времени с помощью аппаратуры спутниковой радионавигационной системы ГЛОНАСС 2. Блоком управления 5 системы оценивается текущее местоположение поезда, его скорость и принимается решение о начале и окончании автоматического торможения поезда, а также выполняется оповещение машиниста о необходимости вмешаться в процесс ведения поезда, посредством запуска устройства контроля бдительности машиниста 8 с автоматической подачей звукового сигнала 6 (1 длинный свисток) в сторону переезда для оповещения водителей автотранспортных средств. На машиниста 7 возлагается принятие окончательного решения о начале увеличения скорости при проследовании переезда, либо о необходимости торможения перед переездом средствами служебного торможения в конце автоматического снижения скорости движения перед переездом до безопасного уровня. Таким образом, функция обеспечения безопасности движения переносится с переездных устройств на локомотив с автоматизацией автоматического снижения скорости перед переездом и с возможностью окончательного контроля ситуации на переезде машинистом.
Система автоматизированного регулирования скорости локомотива в зоне сближения с неохраняемыми и необслуживаемыми переездами математически опробована и графически выражена в приложении для математических и инженерных вычислений Mathcad.
В результате применения системы автоматизированного снижения скорости локомотива обеспечивается безопасность движения на переездах, увеличение пропускной способности на неохраняемых и необслуживаемых переездах и снижение тяжести последствий дорожно-транспортных происшествий на переездах.
| название | год | авторы | номер документа |
|---|---|---|---|
| УНИФИЦИРОВАННЫЙ ВЫЧИСЛИТЕЛЬНЫЙ КОМПЛЕКС СИСТЕМЫ ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ | 2009 |
|
RU2405702C1 |
| Система интервального регулирования движения поездов на основе спутниковых навигационных средств и цифрового радиоканала с координатным методом контроля | 2016 |
|
RU2618659C1 |
| УСТРОЙСТВО ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ПОЕЗДОВ И ПОДОБНЫХ ТРАНСПОРТНЫХ СИСТЕМ | 2002 |
|
RU2333860C2 |
| ЦЕНТРАЛИЗОВАННАЯ СИСТЕМА ОПОВЕЩЕНИЯ РАБОТАЮЩИХ НА ЖЕЛЕЗНОДОРОЖНЫХ ПУТЯХ ПЕРЕГОНА | 2012 |
|
RU2511750C1 |
| СИСТЕМА ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА ПЕРЕГОНЕ | 2012 |
|
RU2513883C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ И МАНЕВРОВЫХ СОСТАВОВ С ПОМОЩЬЮ ЭВМ БЕЗ ОПАСНЫХ ОТКАЗОВ | 2017 |
|
RU2673315C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ ПОЕЗДОВ КОМПЛЕКСНАЯ | 2019 |
|
RU2732495C1 |
| БЕЗОПАСНЫЙ ЛОКОМОТИВНЫЙ ОБЪЕДИНЕННЫЙ КОМПЛЕКС | 2011 |
|
RU2474507C2 |
| КОМПЛЕКСНОЕ УСТРОЙСТВО КОНТРОЛЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДА | 2011 |
|
RU2475397C1 |
| БЕЗОПАСНЫЙ ЛОКОМОТИВНЫЙ ОБЪЕДИНЕННЫЙ КОМПЛЕКС | 2011 |
|
RU2475396C1 |
Изобретение относится к области железнодорожной автоматики для регулирования скорости локомотива в зоне сближения с неохраняемыми и необслуживаемыми переездами. Система включает блок памяти, в котором хранится цифровая карта пути с ординатами переездов и контрольных точек на участке приближения к переезду, программу автоматического регулирования скорости, аппаратуру спутниковой радионавигационной системы ГЛОНАСС/GPS, с помощью которой определяют текущую путевую ординату и скорость, блок управления, формирующий сигнал управления для исполнительного механизма тормозной системы поезда, При этом функция обеспечения безопасности движения через переезд полностью реализуется на локомотиве посредством блока управления путем автоматизированного снижения скорости на участке приближения к переезду до безопасного уровня на основе использования путевой ординаты и скорости, определенных с помощью аппаратуры ГЛОНАСС/GPS, подачи автоматического звукового сигнала в сторону переезда, проверки контроля бдительности машиниста и перехода в полуавтоматический режим ведения локомотива в зоне прямой видимости переезда, предоставляющий машинисту возможность принятия окончательного ситуационного решения в зоне переезда на основе учета фактической ситуации. Достигается повышение безопасности движения на неохраняемых и необслуживаемых переездах. 2 ил.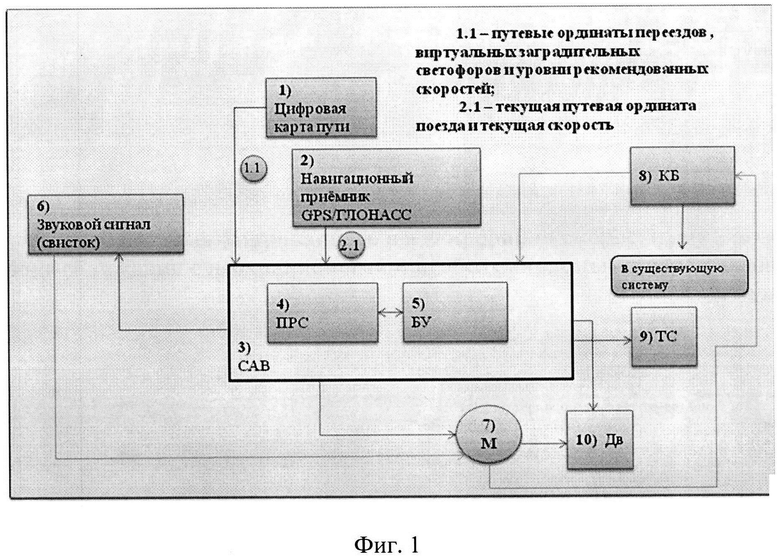
Система автоматизированного регулирования скорости локомотива в зоне сближения с неохраняемыми и необслуживаемыми переездами, включающая в себя блок памяти, в котором хранится цифровая карта пути, с ординатами переездов и контрольных точек на участке приближения к переезду, программу автоматического регулирования скорости, аппаратуру спутниковой радионавигационной системы ГЛОНАСС/GPS, с помощью которой определяют текущую путевую ординату и скорость, и блок управления, формирующий аналоговый сигнал управления для исполнительного механизма тормозной системы поезда, отличающаяся тем, что функция обеспечения безопасности движения через переезд полностью реализуется на локомотиве через блок управления путем автоматизированного снижения скорости на участке приближения к переезду до безопасного уровня на основе использования путевой ординаты и скорости, определенных с помощью аппаратуры ГЛОНАСС/GPS, подачи автоматического звукового сигнала в сторону переезда, проверки контроля бдительности машиниста и перехода в полуавтоматический режим ведения локомотива в зоне прямой видимости переезда с учетом фактической ситуации на переезде и принятием окончательного ситуационного решения машинистом в зоне переезда.
| БЕЗОПАСНЫЙ ЛОКОМОТИВНЫЙ ОБЪЕДИНЕННЫЙ КОМПЛЕКС | 2011 |
|
RU2474507C2 |
| УСТРОЙСТВО ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ПОЕЗДОВ И ПОДОБНЫХ ТРАНСПОРТНЫХ СИСТЕМ | 2002 |
|
RU2333860C2 |
| БОРТОВОЙ ИНФОРМАЦИОННО-УПРАВЛЯЮЩИЙ КОМПЛЕКС ВЫСОКОСКОРОСТНОГО ПОЕЗДА | 2003 |
|
RU2238208C1 |
| БЕЗОПАСНЫЙ ЛОКОМОТИВНЫЙ ОБЪЕДИНЕННЫЙ КОМПЛЕКС | 2011 |
|
RU2475396C1 |
| ЛОКОМОТИВНАЯ СИСТЕМА ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДОВ | 2013 |
|
RU2554912C2 |
| Стартовый пистолет | 1951 |
|
SU94202A1 |

