Область техники, к которой относится изобретение
Изобретение относится к области железнодорожной автоматики и телемеханики и может быть использовано для регулирования движения поездов.
Уровень техники
Известно устройство контроля состояний путевых участков, заключающееся в том, что в рельсовую линию подают сигнал тональной частоты, текущее значение сигнала сравнивают с пороговыми значениями, по результатам сравнения определяют состояния путевого участка, пороговые значения определяют с учетом текущих значений сигнала, в рельсовые линии в смежных циклах опроса подают разные частоты для контроля целостности рельсовых нитей и свободности путевых участков, что позволяет параллельным колебательным контурам, расположенным по концам рельсовой линии, переключаться с режима КЗ на режим XX на каждой из двух частот, при свободной и исправной рельсовой линии фиксируется текущее значение сигнала (тока питающего конца), которое позволяет определить пороговые значения токов контрольного и шунтового режимов, пороговое значение контрольного режима определяется умножением значения текущего тока на коэффициент Кк, который меньше единицы, а пороговое значение шунтового режима определяется умножением значения текущего тока на коэффициент Кш, который больше единицы, если текущее значение тока питающего конца в режиме контроля целостности рельсов меньше порогового значения, то рельсовая линия неисправна, если текущее значение тока питающего конца в режиме контроля свободности рельсовой линии больше порогового значения, то рельсовая линия занята, пороговые значения сохраняют в памяти при занятой или неисправной рельсовой линии, а при свободной и исправной рельсовой линии они постепенно корректируются с учетом значения тока питающего конца, т.е. с учетом значения сопротивления изоляции, при исправных и свободных впереди лежащих рельсовых линиях на локомотив по цифровому радиоканал передается сигнал, разрешающий движение со скоростью, соответствующей количеству свободных участков [Патент №2671605 РФ, Способ контроля состояний путевого участка двухчастотной рельсовой цепью. Полевой Ю.И., Горелик А.В. Опубл. 02. 11. 2018. Бюл. №31, МПК B61L 23/16].
Недостатком устройства является использование напольных приборов рельсовой цепи с несколькими несущими и модулирующими частотами.
Известен способ регулирования движения поездов системой автоблокировки с централизованным размещением аппаратуры, основанный на контроле состояний рельсовых линий, передаче на подвижной состав информации о количестве свободных впереди лежащих рельсовых линий и параметрах маршрута приема (пропуска), отличающийся тем, что напряжение сигнальной частоты от транспортного модуля непрерывно подается в первую линейную цепь для осуществления питания через согласующие устройства в попарно соединенные рельсовые линии в интервалы времени, отведенные для контроля этих линий, к другим концам которых также через согласующие устройства, посредством второй и третьей линейных цепей подключаются путевые приемники на постах ЭЦ, в следующие временные интервалы контролируются другие пары рельсовых линий, временные интервалы задаются с помощью тактовых генераторов с кварцевой стабилизацией, делителей частоты и счетчиков тактов, синхронизация которых осуществляется сигналами цикловой синхронизации, которые формируются в четвертой линейной цепи, в качестве таких сигналов используются кратковременные интервалы между длительными интервалами подачи питания на линейные установки, сигналы цикловой синхронизации формируются в транспортабельном модуле сразу на два направления, подключение напряжения сигнальной частоты к первой линии происходит в транспортабельном модуле, там же формируется и синхроинтервал, подключение согласующих элементов к первой, второй и третьей линейным цепям осуществляется в линейных установках посредством электронных ключей, которые управляются счетными схемами, в которые входят тактовые генераторы, делители частоты и счетчики, входы которых подсоединены к электронным ключам так, чтобы обеспечить поочередный контроль состояний всех рельсовых цепей, на входы путевых приемников на постах ЭЦ поступают аналоговые сигналы, которые затем передаются на ЭВМ поста ЭЦ для обработки по алгоритму работы адаптивной рельсовой цепи, фазы сигналов на входах путевых приемников в смежных промежутках времени отличаются на 180° для того, чтобы снизить влияние инерционности фильтров, этому же способствует сокращение длительности стробирующего импульса, передаваемого от ЭВМ на путевой приемник [Н.Г. Егоренков, В.А. Кононов. Устройства телеуправления диспетчерской централизации системы «ЛУЧ». - М.: Транспорт, 1998, - 304 с.], это улучшает условия приема сигнала путевыми приборами при неполной синхронизации работы счетчиков на посту ЭЦ и линейных установках, полученная информация о состоянии рельсовых линий обрабатывается программой ЭВМ и совместно с информацией о номере пути приема (сквозного или безостановочного пропуска) по радиоканалу передается на подвижной состав, находящийся в зоне управления ЭВМ постов ЭЦ, зоной управления является участок от середины одного перегона до середины другого с расширением его в обе стороны на расстояние тормозного пути, расстояние, соответствующее времени восприятия сигнала, подготовки к торможению, инерционности действия тормозов и др. параметров поезда и пути (при длине рельсовой цепи 0, 5 км этот интервал составляет примерно восемь рельсовых цепей), с подвижного состава на посты ЭЦ ближайших станций поступает информация о координате головы подвижного состава, на подвижном составе с учетом принятой информации по радиоканалам с постов ЭЦ, а также информации, хранящейся в памяти подвижного состава о параметрах пути, путевого развития станций и поезда, с помощью ЭВМ определяется допустимая и оптимальная скорость движения поезда для каждой точки пути и выводится на экран локомотивного навигатора в виде кривых скоростей с отметками мест контроля бдительности, подготовки к торможению, начала торможения и места остановки поезда, а также выводятся на экран рекомендованные позиции органов управления, которые устанавливаются посредством механических устройств управления скоростью движения поезда, вся информация записывается в «черный ящик» для последующего анализа при сбое в регулировании скорости движения поезда, а также для реализации функции самообучения, во время движения поезда машинист контролирует совпадение рекомендованной и фактической скорости движения. [Патент №2662313 РФ, Способ регулирования движения поездов системой автоблокировки с централизованным размещением аппаратуры, Полевой Ю.И., Горелик А.В. Опубл. 25. 07. 2018. Бюл. №21, МПК B61L 23/16].
Недостатками способа являются использование напольных приборов рельсовых цепей, кабельных линий для обмена информацией между станциями.
Данное техническое решение выбрано в качестве прототипа.
Раскрытие изобретения
Результатом, на достижение которого направлено данное техническое решение, является упразднение путевых приборов и кабельных линий на перегоне, повышение достоверности контроля состояний перегонных путевых участков, снижение капитальных и эксплуатационных затрат на строительство и эксплуатацию устройств автоматики и телемеханики.
Способ регулирования движения поездов, основанный на контроле состояний путевых перегонных участков с участием локомотивных и станционной радиостанции, установленной на станции приема, с локомотивов, находящихся в зоне связи со станционной радиостанцией, на посты ЭЦ передается информация о координате головы поезда, на локомотивы с поста ЭЦ передается информация о состоянии впереди лежащих путевых участков, установленных маршрутах на впереди лежащих станциях, локомотивные ЭВМ с учетом принятой информации и информации, хранящейся в памяти о параметрах поезда и пути, путевого развития станций определяют оптимальную скорость движения поезда, а также рекомендуемые позиции локомотивного контроллера и крана машиниста, которые устанавливаются электромеханическим устройством, отличающийся тем, что
обмен информацией между локомотивами, хвостовыми тележками и постами ЭЦ станции отправления и станции приема осуществляют тогда, когда поезд находится на станции, а также на участках приближения или удаления от этих станций, затем связь со станциями осуществляют через ретрансляторы (вышки сотовой связи), размещенные на переездах, локомотивах поездов, идущих по перегону, или стационарных ретрансляторах (вышки сотовой связи);
инициализация подключения и отключения локомотивных радиостанций и радиостанций на прицепных тележках от станционных радиостанций осуществляется по сигналам с приемника ГЛОНАСС на границах зон устойчивой радиосвязи, а так же при движении в зоне неустойчивой радиосвязи через мобильные локомотивные ретрансляторы поездов, идущих вслед или перед поездом;
с радиостанций прицепных тележек на станционные радиостанции передается информация о местонахождении тележки и состоянии путевых участков за хвостом поезда;
прерывание передачи информации не вызывает опасных последствий для движения поездов, происходит только задержка поездов;
обмен информацией между постами ЭЦ станции отправления и станции приема о состоянии перегонных путевых участках, об изменении направления движения на перегоне, а также передаче информации на переезды о приближении поезда, передачи информации с переездов о его работе осуществляется по оптоволоконному кабелю между станциями и переездами.
Устройство контроля состояний путевых участков для осуществления регулирования движения поездов с обменом информацией между локомотивными и станционными радиостанциями, основанное на подаче в рельсовую линию сигнала тональной частоты, сравнении текущего значения сигнала с пороговым значением, которое определяется как произведение коэффициента контрольного режима Кк<1 на усредненное значение текущего тока, измеренного за 5 с до обнаружения повреждения рельсовой нити, пороговое значение сохраняется в памяти при занятой или неисправной рельсовой линии, а при свободной и исправной рельсовой линии его непрерывно корректируют с учетом значения тока питающего конца, при превышении порогового значения сигнала над текущим фиксируют повреждение рельсовой нити;
к хвостовому вагону прицепляют одноосную тележку ТЛ с энергогенератором ЭГ, контрольным блоком КБ, первой и второй приемными катушками ПК1 и ПК2;
в КБ размещены: выпрямитель ВП с аккумуляторной батареей Акк, приемник ГЛОНАСС ПГЛ, электронно-вычислительная машина тележки ЭВМТ, радиостанция тележки РСТ, мобильный приемник рельсовой цепи ПРЦ, мобильный генератор рельсовой цепи ГРЦ, которые соединены меду собой и с клеммами П блока КБ внутриблочными соединениями;
КБ предназначен для контроля целостности рельсовых нитей посредством ГРЦ и ПРЦ на мобильном контрольно-путевом участке КПУ, который расположен между колесной парой тележки и последней колесной парой хвостового вагона, определения и фиксации места повреждения рельсовых нитей с участием ПГЛ и ЭВМТ, передачи информации о координатах места повреждения и контрольно-обводного шунта КОШ (имитатор повреждения рельсовой нити) на посты ЭЦ станции приема и отправления посредством радиостанции тележки РСТ;
узлы и клеммы П КБ соединены между собой следующим образом: клеммы П1 и П2 соединены с выводами 1 и 2 выпрямителя ВП соответственно; клеммы П3 и П4 - с выводами 1 и 2 ГРЦ; клеммы П5, П6 и П7 - с выводами 3, 4 и 5 ПРЦ; клеммы П8 и П9 - с выводами 1 ПГЛ и РСТ; выводы 3 и 4 ВП - с выводами Акк, которые являются полюсами П и М; вывод 2 ПГЛ - с выводом 1 ЭВМТ; выводы 2 ЭВМТ и РСТ - между собой; выводы 1 и 2 ПРЦ - с выводами 3 и 4 ЭВМТ соответственно;
клеммы П КБ соединены с внешними узлами следующим образом: клеммы П1 и П2 соединены соединителями с выводами энергогенератора ЭГ; клеммы П3 и П4 - с фрагментами автосцепки тележки и хвостового вагона соответственно; клеммы П5, П6 и П7 - с выводом ПК2, выводами 2 ПК1 и ПК2, выводом 1 ПК1 соответственно; клеммы П8 и П9 - с антенной приемника ГЛОНАСС ПГЛ АП и с антенной радиостанции РСТ АР соответственно;
выводы 1 и 2 входа приемника ПРЦ соединены с выводами 3 и 4 ЭВМТ, вывод 1 ПК1 - с выводом 1 полосового фильтра ФП1, вывод 2 ПК1 - с выводом 2 ФП1 и выводом 1 полосового фильтра ФП2; вывод 1 ПК2 - с выводом 2 ФП2, вывод 2 ПК2 - с выводом 1 ФП2 и выводом 2 ФП1; выводы 3 и 4 ФП1 соединены с выводами 1 и 2 усилителя У1, выводы 3 и 4 которого - с выводами 1 и 2 выпрямителя В1, выводы 3 и 4 которого - с выводами 1 и 2 аналого-цифрового преобразователя АЦП1, вывод 3 которого - с выводом 3 ЭВМТ; выводы 3 и 4 ФП2 соединены с выводами 1 и 2 усилителя У2, выводы 3 и 4 которого - с выводами 1 и 2 выпрямителя В2, выводы 3 и 4 которого - с выводами 1 и 2 аналого-цифрового преобразователя АЦП2, вывод 3 которого -с выводом 4 ЭВМТ;
приемные катушки ПК1 и ПК2 установлены в непосредственной близости от головок рельсов по следу колес, они имеют Г-образный сердечник и защитную пластину от случайного соприкосновения катушек с головкой рельса;
ток от ГРЦ протекает по рельсам под катушками ПК1 и ПК2 и наводит в них ЭДС, затем ток от наведенной ЭДС в ПРЦ фильтруется ФП, усиливается У, выпрямляется В и преобразуется АЦП в цифровой сигнал;
при перемещении ПК1 над контрольно-обходным шунтом КОШ ЭВМТ фиксирует повреждение рельсовой нити из-за того, что снижается ток в рельсе за счет оттока части тока по КОШ, при этом РСТ передает радиосигнал на одну из прилегающих к перегону ж.д. станций, где ЭВМС сверяет полученную координату с координатой установки КОШ, которая хранится в памяти ЭВМС, в случае совпадения координат фиксируется исправная работа мобильных устройств контроля целостности рельсовых нитей и свободности путевых участков за хвостом поезда;
контроль свободности путевых участков за хвостом поезда осуществляется путем сравнения длины поезда, информация о которой хранится в памяти ЭВМС станций прилегающих к перегону, и длины поезда, которая рассчитывается с учетом полученных координат головы и хвоста поезда.
Краткое описание чертежей
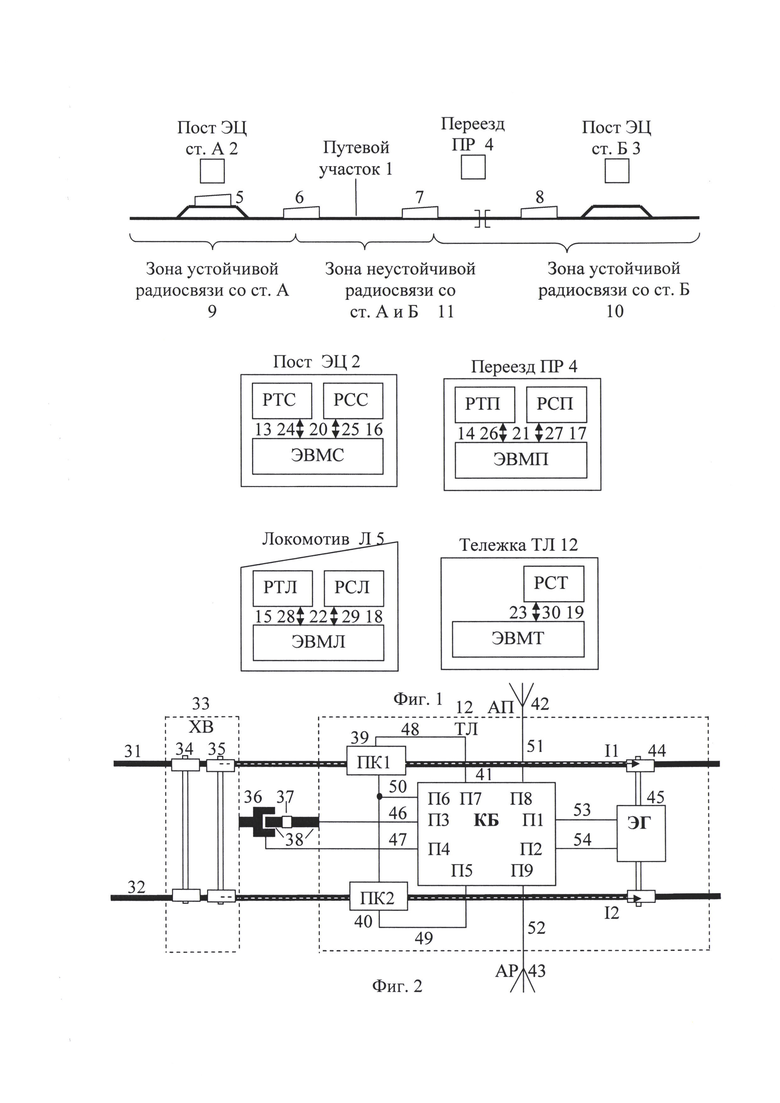
На фиг. 1 представлено путевое развитие участка ж.д. с поездами и фрагменты структурных схем соединений приборов поста ЭЦ, переезда, локомотива и прицепной тележки, на фиг. 2 - структурная схема соединений приборов и узлов прицепной тележки; на фиг. 3 - структурная схема соединений приборов и узлов контрольного блока прицепной тележки; на фиг. 4 - внешний вид приемной катушки; на фиг. 5 - структурная схема соединений узлов мобильного приемника рельсовой цепи; на фиг. 6 - путевой участок с контрольными обводными шунтами.
Описание изобретения
На фиг. 1-6 приведены следующие условные обозначения:
1 - путевое развитие участка ПРУ;
2 и 3 - посты ЭЦ станции А и Б;
4 - переезд ПЕР;
5, 6, 7 и 8 - поезда;
9 и 10 - зоны устойчивой радиосвязи;
11 - зона неустойчивой радиосвязи;
12 - прицепная тележка ТЛ;
13, 14 и 15 - ретранслятор РТС поста ЭЦ, переезда РТП и локомотива РТЛ соответственно;
16, 17, 18 и 19 - радиостанции поста ЭЦ РСС, переезда РТП, локомотива РТЛ и тележки РЛЛ соответственно;
20, 21, 22 и 23 - ЭВМ поста ЭЦ ЭВМС, переезда ЭВМП, локомотива ЭВМЛ и тележки ЭВМТ соответственно;
24, 25, 26, 27, 28, 29 и 30 - соединения между ЭВМС и РТС, ЭВМС и РСС поста ЭЦ, соединения между ЭВМП и РТП, ЭВМП и РСП переезда, ЭВМЛ и РТЛ локомотива, ЭВМЛ и РСЛ, ЭВМТ и РСТ тележки соответственно;
31 и 32 - первый и второй рельсы;
33 - хвостовой вагон ХВ;
34 и 35 - колесные пары ХВ;
36 - фрагмент автосцепки ХВ;
37 - изолятор в фрагменте автосцепки ТЛ;
38 - фрагменты автосцепки ТЛ;
39 и 40 - первая и вторая приемные катушки ПК1 и ПК2 соответственно;
41 - контрольный блок КБ;
42 и 43 - антенны приемника ГЛОНАСС АП и радиостанции АР соответственно;
44 - колесная пара ТЛ;
45 - энергогенератор ТЛ;
46 и 47 - соединения между КБ и фрагментами автосцепок ХВ и ТЛ;
48, 49 и 50 - соединения между КБ и ПК1, ПК2;
51 и 52 - соединения между КБ и АП, КБ и АР соответственно;
53 и 54 - соединения между КБ и ЭГ;
55 - выпрямитель ВП;
56 - аккумуляторная батарея Акк;
57 - приемник ГЛОНАСС ПГЛ;
58 - приемник рельсовой цепи ПРЦ;
59 - генератор рельсовой цепи ГРЦ;
60 - плюсовой полюс источника питания П;
61 - минусовой полюс источника питания М;
62, 63, 64 - соединения между узлами КБ;
65 - сердечник приемной катушки;
66 - защитная пластина;
67 и 68 - первый и второй полосовые фильтры ФП1 и ФП2;
69 и 70 - первый и второй усилители У1 и У2;
71 и 72 - первый и второй выпрямители В1 и В2;
73 и 74 - первый и второй аналого-цифровые преобразователи АЦП1 и АЦП2.
75, 76 и 77 - первый, второй и третий контрольно-обходные шунты КОШ1, КОШ2 и КОШ3 соответственно.
В тексте описания имеются следующие сокращения:
I1 и I2 - ток первого и второго рельсов; АЦП - аналого-цифровой преобразователь; В - выпрямитель, КОШ - контрольно обходной шунт; КПУ - контрольно-путевой участок; П1, П2, П3, П4, П5, П6, П7, П8 и П9 - клеммы блока КБ; PC - радиостанция, РТ - ретранслятор; У - усилитель; ФП - полосовой фильтр; ЭВМ - электронно-вычислительная машина.
Способ регулирования движения поездов основан на контроле состояний путевых перегонных участков с участием локомотивных и станционных радиостанций, установленных на станциях приема и отправления. С локомотивов, находящихся в зоне связи со станционной радиостанцией, на посты ЭЦ передается информация о координатах головы поезда, на локомотивы с постов ЭЦ передается информация о состоянии впереди лежащих путевых участков, установленных маршрутах на впереди лежащих станциях. Локомотивные ЭВМ с учетом принятой информации и информации, хранящейся в памяти о параметрах поезда и пути, путевого развития станций определяют оптимальную скорость движения поезда, а также рекомендуемые позиции локомотивного контроллера и крана машиниста, которые устанавливаются электромеханическим устройством.
С прицепных тележек на посты ЭЦ передается информация о местонахождении тележек и состоянии путевых участков за хвостом поезда.
Обмен информацией между локомотивом, прицепной тележкой и постами ЭЦ станции отправления и станции приема осуществляется тогда, когда локомотив находится на одной из станций, а также на участках приближения или удаления от этих станций (зоны устойчивой радиосвязи), затем связь со станциями осуществляется через ретрансляторы (вышки сотовой связи), размещенные на переездах, локомотивах поездов следующих по перегону (в зоне неустойчивой радиосвязи), или специально установленных стационарных ретрансляторах (вышки сотовой связи, на фигурах не представлены).
Инициализация подключений и отключений локомотивной радиостанции от станционных радиостанций осуществляется по сигналам с приемника ГЛОНАСС на границах зон устойчивой радиосвязи, а также при движении в зоне неустойчивой радиосвязи через мобильные локомотивные ретрансляторы поездов, идущих следом или перед поездом, а также через мобильные локомотивные ретрансляторы поездов, идущих по пути встречного направления.
При перерыве (прерывании) передачи информации опасных последствий для движения поездов не возникает (появляется информация об остановке подвижного состава), происходит только задержка поездов.
Обмен информацией между постами ЭЦ станции отправления и станции приема о состоянии перегонных участках, об изменении направления движения на перегоне, а также передача информации на переезды о приближении поездов и передача информации с переездов о его работе осуществляется по оптоволоконному кабелю, проложенному между станциями.
На фиг. 1 представлен путевой план перегона 1 между станциями А 2 и Б 3, переезд ПР 4, поезда 5, 6, 7 и 8, зоны устойчивой радиосвязи 9 и 10 и зона неустойчивой радиосвязи 11. Зонами устойчивой радиосвязи являются станции, участки приближения и удаления от станций и переездам, а также окрестности вышек сотовой связи (ретрансляторы, на фиг. 1 не показаны). Остальные участки являются зонами неустойчивой связи. На линиях с интенсивным движением, а также на двухпутных и многопутных участках в качестве ретрансляторов могут использоваться мобильные ретрансляторы, установленные на локомотивах встречного направления движения.
На фиг. 1 изображены фрагменты структурных схем соединений приборов поста ЭЦ 2, переезда ПР 4, локомотива Л 5 и прицепной тележки ТЛ 12. На посту ЭЦ 2, переезде ПР 4, Л 5 и ТЛ 12 размещены РСС 16, РСП 17, РСЛ 18 и РСТ 19, ЭВМС 20, ЭВМП 21, ЭВМЛ 22 и ЭВМТ, которые соединены связями 25, 27, 29 и 30, кроме того на посту ЭЦ 2, ПР 4 и Л 5 размещены РТС 13, РТП 14 и РТЛ 15, которые соединены с ЭВМ связями 24, 26 и 28. РТ являются ретрансляторами для обеспечения связи между РСЛ 18 с РСС 16. Радиостанции осуществляют обмен информацией между постом ЭЦ 2, ПР 4, Л 5 и ТЛ 12. Благодаря PC с Л 5 на пост ЭЦ 2 передается информация о местонахождении локомотива, хвостового вагона поезда, состоянии путевых участков за хвостом поезда; с поста ЭЦ 2 на Л передается информация о состоянии путевых участков перегонов и станций, установленных маршрутах.
Мобильное устройство контроля состояний путевых участков для осуществления регулирования движения поездов с обменом информацией между локомотивными и станционными радиостанциями, основанное на подаче в рельсовую линию сигнала тональной частоты, сравнении текущего значения сигнала с пороговым значением, которое определяется как произведения коэффициента контрольного режима Кк<1 на усредненное значения текущего тока, измеренного за 5 с до обнаружения повреждения рельсовой нити. Пороговое значение сохраняется в памяти при занятой или неисправной рельсовой линии, а при свободной и исправной рельсовой линии его непрерывно корректируют с учетом значения тока питающего конца. При превышении порогового значения сигнала над текущим значением фиксируют повреждение рельсовой нити.
К хвостовому вагону прицепляется одноосная тележка ТЛ 12 (фиг. 2) с энергогенератором ЭГ 45, контрольным блоком КБ 41, первой и второй приемными катушками ПК1 39 и ПК2 40. В КБ 41 размещены: выпрямитель ВП 55 (фиг. 3) с аккумуляторной батареей Акк 56, приемник ГЛОНАСС ПГЛ 57, электронно-вычислительная машина тележки ЭВМТ 23, радиостанция тележки РСТ 19, мобильный приемник рельсовой цепи ПРЦ 58, мобильный генератор рельсовой цепи ГРЦ 59; которые соединены меду собой и с клеммами П блока КБ внутриблочными соединениями 30, 60, 61, 62, 63, 64. КБ 41 предназначен для контроля целостности рельсовых нитей посредством ГРЦ 59 и ПРЦ 58 на контрольно-путевом участке КПУ, который расположен между колесной парой тележки 44 и последней колесной парой хвостового вагона 35, определения и фиксации места повреждения рельсовых нитей посредством ПГЛ 57 (фиг. 2) и ЭВМТ 23, передаче информации о повреждении, координатах места повреждения и контрольно-обводного шунта КОШ 75 (76, 77) (фиг. 6) (КОШ - имитатор повреждения рельсовой нити) на пост ЭЦ 2 (фиг. 1) станции приема или пост ЭЦ 3 станции отправления посредством РСТ 19. Узлы и клеммы П КБ 41 (фиг. 3) соединены между собой следующим образом: клеммы Ш и П2 соединены соединителями 53 и 54 с выводами 1 и 2 выпрямителя ВП 55 соответственно; клеммы П3 и П4 - соединителями 46 и 47 с выводами 1 и 2 ГРЦ; клеммы П5, П6 и П7 - соединителями 49, 50 и 48 с выводами 3, 4 и 5 ПРЦ; клеммы П8 и П9 - соединителями 51 и 52 с выводами 1 ПГЛ и РСТ; выводы 3 и 4 ВП - соединителями 60 и 61 с выводами Акк 56, которые являются полюсами П и М; вывод 2 ПГЛ - соединителем 62 с выводом 1 ЭВМТ; выводы 2 ЭВМТ и РСТ - между собой соединителем 30; выводы 1 и 2 ПРЦ - соединителями 63 и 64 с выводами 3 и 4 ЭВМТ соответственно. Клеммы П КБ соединены с внешними узлами следующим образом: клеммы П1 и П2 соединены соединителями 53 и 54 (фиг. 2 и 3) с выводами энергогенератора ЭГ 45; клеммы П3 и П4 - соединителями 46 и 47 с фрагментами автосцепки тележки 38 и хвостового вагона 36 соответственно; клеммы П5, П6 и П7 - соединителями 49, 50 и 48 с выводом 1 ПК2 40, выводами 2 ПК1 39 и ПК2 40, выводом 1 ПК1 39 соответственно; клеммы П8 и П9 - соединителями 51 и 52 с антенной приемника ГЛОНАСС ПГЛ АП 42 и с антенной радиостанции РСТ АР 43. Выводы 5, 4 и 3 входа приемника ПРЦ 58 (фиг. 3, 4 и 5) соединены с выводами ПК1 39 и ПК2 40 соединителями 48, 50 и 49, а выводы 1 и 2 выхода -с выводами 3 и 4 ЭВМТ соединителями 63и 64; вывод 1 ПК1 39 соединен с выводом 1 полосового фильтра ФП1 67, вывод 2 ПК1 - с выводом 2 ФП1 67 и выводом 1 полосового фильтра ФП2 68; вывод 1 ПК2 40 - с выводом 2 ФП2 68, вывод 2 ПК2 40 - с выводом 1 ФП2 68 и выводом 2 ФП1 67; выводы 3 и 4 ФП1 67 соединены с выводами 1 и 2 усилителя У1 69, выводы 3 и 4 которого -с выводами 1 и 2 выпрямителя В1 71, выводы 3 и 4 которого - с выводами 1и 2 аналого-цифрового преобразователя АЦП1 73, вывод 3 которого - с выводом 3 ЭВМТ 23; выводы 3 и 4 ФП2 68 - с выводами 1 и 2 усилителя У2, выводы 3 и 4 которого - с выводами 1 и 2 выпрямителя В2 72, выводы 3 и 4 которого - с выводами 1 и 74 2 аналого-цифрового преобразователя АЦП2, вывод 3 которого - с выводом 4 ЭВМТ 23.
Приемные катушки ПК1 39 (фиг. 4) и ПК2 40 установлены в непосредственной близости к головкам рельсов 31 и 32 по следу колес, имеют Г-образный сердечник 65 и защитную пластину 66 от случайного соприкосновения катушки 39 с головкой рельса 31. Токи от ГРЦ 59 I1 и I2 (фиг. 2) протекают по рельсам 31 и 32 под катушками ПК1 39 и ПК2 40 (фиг. 4 и 5) и наводят в них ЭДС. Токи от наведенных ЭДС в ПРЦ 58 отфильтровываются ФП1 67 и ФП2 68, усиливаются У1 69 и У2 70, выпрямляются В1 71 и В2 72, и аналого-цифровыми преобразователями АЦП1 73 и АЦП2 74 преобразуется в цифровой сигнал, который и по соединениям 63 и 64 воздействует на ЭВМТ 23. При перемещении ПК1 над контрольно обходным шунтом КОШ 75 (76, 77) (фиг. 6) ЭВМТ 23 (фиг. 5) фиксирует повреждение рельсовой нити из-за того, что снижается ток в рельсе за счет оттока части тока по КОШ 75, при этом РСТ передает радиосигнал на одну из прилегающих к перегону станций, где ЭВМС сверяет полученную координату с координатой установки КОШ, которая хранится в памяти ЭВМС. В случае совпадения координат фиксируется исправная работа мобильных устройств контроля целостности рельсовых нитей, исправность рельс и свободности путевых участков за хвостом поезда. Контроль свободности путевых участков за хвостом поезда осуществляется путем сравнения информации о длине поезда, которая хранится в памяти ЭВМС и информации о длины поезда, которая рассчитывается с помощью координат головы и хвоста поезда, которые поступают на станции, прилегающие к перегону.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ | 2020 |
|
RU2729753C1 |
| УСТРОЙСТВО РЕЗЕРВНОГО КОНТРОЛЯ СОСТОЯНИЙ ПУТЕВЫХ УЧАСТКОВ | 2020 |
|
RU2751830C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ ЦЕЛОСТНОСТИ РЕЛЬСОВЫХ НИТЕЙ | 2020 |
|
RU2727427C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ | 2021 |
|
RU2770034C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ДЛИННОСОСТАВНЫХ ПОЕЗДОВ | 2022 |
|
RU2781702C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА ПЕРЕГОНЕ | 2020 |
|
RU2730699C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ | 2020 |
|
RU2732181C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА УЧАСТКАХ С ЭЛЕКТРИЧЕСКОЙ ТЯГОЙ | 2020 |
|
RU2738487C1 |
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ О СОСТОЯНИИ РЕЛЬСОВЫХ ЦЕПЕЙ НА СКОРОСТНЫЕ ПОЕЗДА | 2022 |
|
RU2781704C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ | 2018 |
|
RU2694679C1 |

Техническое решение относится к средствам контроля состояний путевых участков и регулирования движения поездов. В предложенном решении к поезду подсоединяется одноосная прицепная тележка с аппаратурой мобильного контроля целостности рельсовых нитей и свободности путевых участков за хвостом поезда, на тележке устанавливается генератор для питания приборов, приемник ГЛОНАСС и радиостанция, на локомотиве также устанавливается радиостанция. Обе радиостанции обеспечивают связь с ближайшими станциями с помощью ретрансляторов, установленных на всех локомотивах. Инициализация подключения и отключения локомотивных радиостанций и радиостанций на прицепных тележках от станционных радиостанций осуществляется по сигналам с приемника ГЛОНАСС на границах зон устойчивой радиосвязи, а также при движении в зоне неустойчивой радиосвязи через мобильные локомотивные ретрансляторы поездов, идущих вслед или перед поездом. Достигается повышение достоверности контроля состояний перегонных путевых участков. 2 н.п. ф-лы, 6 ил.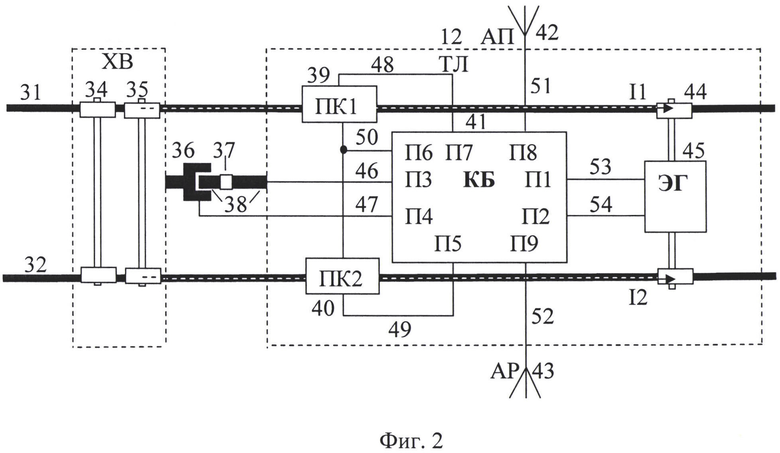
1. Способ регулирования движения поездов, основанный на контроле состояний путевых перегонных участков с участием локомотивных и станционной радиостанции, установленной на станции приема, с локомотивов, находящихся в зоне связи со станционной радиостанцией, на посты ЭЦ передается информация о координате головы поезда, на локомотивы с поста ЭЦ передается информация о состоянии впереди лежащих путевых участков, установленных маршрутах на впереди лежащих станциях, локомотивные ЭВМ с учетом принятой информации и информации, хранящейся в памяти о параметрах поезда и пути, путевого развития станций определяют оптимальную скорость движения поезда, а также рекомендуемые позиции локомотивного контроллера и крана машиниста, которые устанавливаются электромеханическим устройством, отличающийся тем, что обмен информацией между локомотивами, хвостовыми тележками и постами ЭЦ станции отправления и станции приема осуществляют тогда, когда поезд находится на станции, а также на участках приближения или удаления от этих станций, затем связь со станциями осуществляют через ретрансляторы, размещенные на переездах, локомотивах поездов, идущих по перегону, или стационарных ретрансляторах; инициализация подключения и отключения локомотивных радиостанций и радиостанций на прицепных тележках от станционных радиостанций осуществляется по сигналам с приемника ГЛОНАСС на границах зон устойчивой радиосвязи, а также при движении в зоне неустойчивой радиосвязи через мобильные локомотивные ретрансляторы поездов, идущих вслед или перед поездом; с радиостанций прицепных тележек на станционные радиостанции передается информация о местонахождении тележки и состоянии путевых участков за хвостом поезда; прерывание передачи информации не вызывает опасных последствий для движения поездов, происходит только задержка поездов; обмен информацией между постами ЭЦ станции отправления и станции приема о состоянии перегонных путевых участках, об изменении направления движения на перегоне, а также передаче информации на переезды о приближении поезда, передача информации с переездов о его работе осуществляется по оптоволоконному кабелю между станциями и переездами.
2. Устройство контроля состояний путевых участков для осуществления регулирования движения поездов с обменом информацией между локомотивными и станционными радиостанциями, основанное на подаче в рельсовую линию сигнала тональной частоты, сравнении текущего значения сигнала с пороговым значением, которое определяется как произведение коэффициента контрольного режима Кк<1 на усредненное значение текущего тока, измеренного за 5 с до обнаружения повреждения рельсовой нити, пороговое значение сохраняется в памяти при занятой или неисправной рельсовой линии, а при свободной и исправной рельсовой линии его непрерывно корректируют с учетом значения тока питающего конца, при превышении порогового значения сигнала над текущим значением фиксируют повреждение рельсовой нити; к хвостовому вагону прицепляют одноосную тележку ТЛ (12) с энергогенератором ЭГ (45), контрольным блоком КБ (41), первой и второй приемными катушками ПК1(39) и ПК2 (40); в КБ (41) размещены: выпрямитель ВП (55) с аккумуляторной батареей Акк (56), приемник ГЛОНАСС ПГЛ (57), электронно-вычислительная машина тележки ЭВМТ (23), радиостанция тележки РСТ (19), мобильный приемник рельсовой цепи ПРЦ (58), мобильный генератор рельсовой цепи ГРЦ (59), которые соединены меду собой и с клеммами П блока КБ (41) внутриблочными соединениями; КБ (41) предназначен для контроля целостности рельсовых нитей посредством ГРЦ (59) и ПРЦ (58) на мобильном контрольно-путевом участке КПУ, который расположен между колесной парой тележки и последней колесной парой хвостового вагона, определения и фиксации места повреждения рельсовых нитей с участием ПГЛ (57) и ЭВМТ (23), передачи информации о координатах места повреждения и контрольно-обводного шунта КОШ (75), (76) и (77) на посты ЭЦ (2) станции приема и отправления посредством радиостанции тележки РСТ (19); узлы и клеммы П КБ (41) соединены между собой следующим образом: клеммы Ш и П2 соединены с выводами 1 и 2 выпрямителя ВП (55) соответственно; клеммы П3 и П4 - с выводами 1 и 2 ГРЦ; клеммы П5, П6 и П7 - с выводами 3, 4 и 5 ПРЦ (59); клеммы П8 и П9 - с выводами 1 ПГЛ (57) и РСТ (19); выводы 3 и 4 ВП (55) - с выводами Акк (56), которые являются полюсами П и М; вывод 2 ПГЛ (57) - с выводом 1 ЭВМТ (23); выводы 2 ЭВМТ (23) и РСТ (19) - между собой; выводы 1 и 2 ПРЦ (58) - с выводами 3 и 4 ЭВМТ (23) соответственно; клеммы П (КБ 41) соединены с внешними узлами следующим образом: клеммы П1 и П2 соединены соединителями с выводами энергогенератора ЭГ (45); клеммы П3 и П4 - с фрагментами автосцепки тележки и хвостового вагона соответственно; клеммы П5, П6 и П7 - с выводом ПК2 (40), выводами 2 ПК1 (39) и ПК2 (40), выводом 1 ПК1 (39) соответственно; клеммы П8 и П9 - с антенной приемника ГЛОНАСС ПГЛ АП (42) и с антенной радиостанции РСТ АР (43) соответственно; выводы 1 и 2 входа приемника ПРЦ (58) соединены с выводами 3 и 4 ЭВМТ (23), вывод 1 ПК1 (39) - с выводом 1 полосового фильтра ФП1 (67), вывод 2 ПК1 (39) - с выводом 2 ФП1 (67) и выводом 1 полосового фильтра ФП2 (68); вывод 1 ПК2 - с выводом 2 ФП2, вывод 2 ПК2 - с выводом 1 ФП2 и выводом 2 ФШ (67); выводы 3 и 4 ФП1(67) соединены с выводами 1 и 2 усилителя У1 (69), выводы 3 и 4 которого - с выводами 1 и 2 выпрямителя В1 (71), выводы 3 и 4 которого - с выводами 1 и 2 аналого-цифрового преобразователя АЦП1 (73), вывод 3 которого - с выводом 3 ЭВМТ (23); выводы 3 и 4 ФП2 (68) соединены с выводами 1 и 2 усилителя У2 (70), выводы 3 и 4 которого - с выводами 1 и 2 выпрямителя В2 (72), выводы 3 и 4 которого - с выводами 1 и 2 аналого-цифрового преобразователя АЦП2 (74), вывод 3 которого - с выводом 4 ЭВМТ (23); приемные катушки ПК1 (39) и ПК2 (40) установлены в непосредственной близости от головок рельсов по следу колес, они имеют Г-образный сердечник и защитную пластину от случайного соприкосновения катушек с головкой рельса; ток от ГРЦ (59) протекает по рельсам под катушками ПК1 (39) и ПК2 (40) и наводит в них ЭДС, затем ток от наведенной ЭДС в ПРЦ (58) фильтруется ФП, усиливается У, выпрямляется В и преобразуется АЦП в цифровой сигнал; при перемещении ПК1 (39) над контрольно-обходным шунтом КОШ (75), (76) и (77) ЭВМТ (23) фиксирует повреждение рельсовой нити из-за того, что снижается ток в рельсе за счет оттока части тока по КОШ (75), (76) и (77), при этом РСТ (19) передает радиосигнал на одну из прилегающих к перегону ж.д. станций, где ЭВМС (20) сверяет полученную координату с координатой установки КОШ (75), (76) и (77), которая хранится в памяти ЭВМС (20), в случае совпадения координат фиксируется исправная работа мобильных устройств контроля целостности рельсовых нитей и свободности путевых участков за хвостом поезда; контроль свободности путевых участков за хвостом поезда осуществляется путем сравнения длины поезда, информация о которой хранится в памяти ЭВМС (20) станций, прилегающих к перегону, и длины поезда, которая рассчитывается с учетом полученных координат головы и хвоста поезда.
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА ПЕРЕГОНЕ БЕЗ НАПОЛЬНЫХ УСТРОЙСТВ ЖЕЛЕЗНОДОРОЖНОЙ АВТОМАТИКИ | 2019 |
|
RU2712364C1 |
| СПОСОБ КОНТРОЛЯ ЦЕЛОСТНОСТИ РЕЛЬСОВЫХ НИТЕЙ ПО СООТНОШЕНИЮ ЗНАЧЕНИЙ ТОКОВ В РЕЛЬСАХ | 2019 |
|
RU2706607C1 |
| Устройство для автоматической электрической сигнализации о разрыве поезда | 1947 |
|
SU71193A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ СИСТЕМОЙ АВТОБЛОКИРОВКИ С ЦЕНТРАЛИЗОВАННЫМ РАЗМЕЩЕНИЕМ АППАРАТУРЫ | 2017 |
|
RU2662313C1 |
| Н | |||
| Г | |||
| Егоренков, В | |||
| А Кононов | |||
| Устройства телеуправления диспетчерской централизации системы "ЛУЧ" | |||
| М.: Транспорт, 1998 г., 306 с. | |||

