Устройство относится к области железнодорожной автоматики и телемеханики и может быть использовано в устройствах контроля за управлением локомотивом и бдительностью машиниста.
Известно устройство контроля за управлением локомотивом и бдительностью машиниста, содержащее межмодульный интерфейс, усилитель электропневматического клапана, выход которого соединен с входом электропневматического клапана, а вход - с выходом безопасной схемы контроля, входы которой соединены с выходами двух модулей центральной обработки информации, которые соединены между собой и подключены к межмодульному интерфейсу, к которому подключены два модуля измерения параметров движения, входы которых соединены с датчиками пути и скорости, два модуля непрерывных каналов внешних устройств, входы которых соединены с приемными катушками АЛСН и АЛС-ЕН, модуль маршрута, соединенный с первым выходом приемника спутниковой навигации, соединенного с антенной спутниковой навигации, и модуль радиоканала, первый порт которого соединен с радиомодемом, выход которого соединен с радиоантенной, блок кодирования/декодирования сообщений, содержащий координатно-временную информацию, блок интерфейса машиниста и блок контроля бдительности, причем выход приемника спутниковой навигации соединен с входом блока кодирования/декодирования сообщений, первый порт которого соединен с блоком интерфейса машиниста, а второй порт подключен к межмодульному интерфейсу, блок контроля бдительности соединен с межмодульным интерфейсом и рукояткой бдительности, которая подключена к блоку интерфейса машиниста (RU 106206, B61L 25/04, 10.07.2011).
Известное устройство не осуществляет мониторинг препятствий на пути движения поезда (оказавшиеся на пути предметы, люди и животные), которые не обнаруживаются устройствами контроля свободности путевых участков от подвижного состава. По этой причине известное устройство не обеспечивает необходимый уровень безопасности движения.
В качестве прототипа выбрано устройство контроля за управлением локомотивом и бдительностью машиниста, содержащее межмодульный интерфейс, усилитель электропневматического клапана, выход которого соединен с входом электропневматического клапана, а вход - с выходом безопасной схемы контроля, входы которой соединены с выходами двух модулей центральной обработки информации, которые соединены между собой и подключены к межмодульному интерфейсу, к которому подключены два модуля измерения параметров движения, входы которых соединены с датчиками пути и скорости, два модуля непрерывных каналов внешних устройств, входы которых соединены с приемными катушками АЛСН и АЛС-ЕН, модуль маршрута, соединенный с первым выходом приемника спутниковой навигации, модуль радиоканала, первый порт которого соединен с радиомодемом, блок кодирования/декодирования сообщений и блок контроля бдительности, второй выход приемника спутниковой навигации соединен с входом блока кодирования/декодирования сообщений, первый порт которого соединен с блоком интерфейса машиниста, а второй порт подключен к межмодульному интерфейсу, блок контроля бдительности соединен с рукояткой бдительности, которая подключена к блоку интерфейса машиниста, блок цифровой обработки сигналов, первый и второй порты которого подключены соответственно к портам цифровой видеокамеры и радиолокационного измерителя дальности и скорости, а его третий порт соединен с межмодульным интерфейсом (RU133799, B61L 25/04, 27.10.2013).
Недостатком известного устройства является ограниченность области применения, обусловленная отсутствием возможности беспилотного вождения поездов.
Технический результат заключается в расширении области применения за счет обеспечения возможности беспилотного вождения поездов.
Технический результат достигается тем, что устройство контроля за управлением локомотивом и бдительностью машиниста, содержащее межмодульный интерфейс, усилитель электропневматического клапана, выход которого соединен с входом электропневматического клапана, а вход - с выходом безопасной схемы контроля, входы которой соединены с соответствующими выходами двух модулей центральной обработки информации, которые соединены между собой и подключены своими портами к межмодульному интерфейсу, к которому подключены два модуля измерения параметров движения, входы которых соединены с блоком датчиков пути и скорости, два модуля непрерывных каналов внешних устройств, входы которых соединены с приемными катушками АЛСН и АЛС-ЕН, модуль маршрута, соединенный с первым выходом приемника спутниковой навигации, модуль радиоканала, порт которого соединен с радиомодемом и блок кодирования/декодирования сообщений, блок контроля бдительности, второй выход приемника спутниковой навигации соединен с входом блока кодирования/декодирования сообщений, первый порт которого соединен с блоком интерфейса машиниста, а второй порт подключен к межмодульному интерфейсу, причем блок контроля бдительности соединен с рукояткой бдительности, которая подключена к блоку интерфейса машиниста, согласно изобретению оно снабжено блоком поддержки беспилотного режима ведения поезда, состоящего из подключенных к внутреннему интерфейсу связи двух блоков датчиков обнаружения и позиционирования препятствий на пути перед поездом и модуля памяти с записанной в нем базой данных актуальной истории движения по маршрутам следования поезда, порт связи каждого блока датчиков обнаружения и позиционирования препятствий на пути перед поездом подключен к порту связи соответствующего процессора обработки паттернов сигналов отраженных от возможных препятствий и от выделенных объектов придорожной инфраструктуры, к другим портам связи которого подключены соответственно модуль контролируемых искусственных нейронных сетей распознавания препятствий и паттернов эксплуатационных ситуаций по управлению движением поезда и модуль жесткого логического контроля качества расчёта, при этом модули соединены между собой линией связи, дополнительный порт связи каждого процессора обработки паттернов сигналов отраженных от возможных препятствий и от выделенных объектов придорожной инфраструктуры подключен к внутреннему интерфейсу связи, который соединен с межмодульным интерфейсом устройства.
На чертеже приведена схема устройство контроля за управлением локомотивом и бдительностью машиниста.
Устройство контроля за управлением локомотивом и бдительностью машиниста содержит межмодульный интерфейс 1, усилитель 2 электропневматического клапана, выход которого соединен с входом электропневматического клапана 3 (ЭПК), а вход - с выходом безопасной схемы 4 контроля, входы которой соединены с соответствующими выходами двух модулей 5 и 6 центральной обработки информации (МЦО), которые соединены между собой и подключены своими портами к межмодульному интерфейсу 1, к которому подключены два модуля 7 и 8 измерения параметров движения, входы которых соединены с блоком 9 датчиков пути и скорости, два модуля 10 и 11 непрерывных каналов внешних устройств (ВУ), входы которых соединены с приемными катушками 12 АЛСН и АЛС-ЕН, модуль 13 маршрута, соединенный с первым выходом приемника 14 спутниковой навигации, модуль 15 радиоканала, порт которого соединен с радиомодемом 16, блок 17 кодирования/декодирования сообщений и блок 18 контроля бдительности, второй выход приемника 14 спутниковой навигации соединен с входом блока 17 кодирования/декодирования сообщений, первый порт которого соединен с блоком 19 интерфейса машиниста, а второй порт подключен к межмодульному интерфейсу 1, причем блок 18 контроля бдительности соединен с рукояткой 20 бдительности, которая подключена к блоку 19 интерфейса машиниста, блок 21 поддержки беспилотного режима ведения поезда, состоит из подключенных к внутреннему интерфейсу 22 связи двух блоков 23 и 24 датчиков обнаружения и позиционирования препятствий на пути перед поездом (включающие оптические, и/или радио локационные, и/или ультразвуковые датчики обнаружения и позиционирования препятствий) и модуля 25 памяти с записанной в нем базой данных актуальной истории движения по маршрутам следования поезда, порт связи каждого блока 23 (24) датчиков обнаружения и позиционирования препятствий на пути перед поездом подключен к порту связи соответствующего процессора 26 (27) обработки паттернов сигналов отраженных от возможных препятствий и от выделенных объектов придорожной инфраструктуры, к другим портам связи которого подключены соответственно модуль 28 (29) контролируемых искусственных нейронных сетей распознавания препятствий и паттернов эксплуатационных ситуаций по управлению движением поезда и модуль 30 (31) жесткого логического контроля качества расчёта, при этом модули 28 и 30 (29 и 31) соединены между собой линией связи, дополнительный порт связи каждого процессора 26 (27) обработки паттернов сигналов отраженных от возможных препятствий и от выделенных объектов придорожной инфраструктуры подключен к внутреннему интерфейсу 22 связи, который соединен с межмодульным интерфейсом 1 устройства.
Устройство контроля за управлением локомотивом и бдительностью машиниста работает следующим образом.
Перед каждой поездкой в базы данных модуля 13 маршрута и в модуль 25 памяти с записанной в нем базой данных актуальной истории движения по маршрутам следования поезда заносят актуальные данные для управления движением поезда для каждой координаты маршрута движения поезда.
Сигналы АЛСН и АЛС-ЕН, через приемные катушки 12, поступают в модули 10 и 11 непрерывных каналов внешних устройств и дешифрируются для отображения на индикаторе блока 19 интерфейса машиниста состояния впереди расположенных участков пути и показаний путевых светофоров, а также для сообщения машинисту допустимой скорости движения поезда.
Допустимая скорость движения рассчитывается в модулях 5 и 6 центральной обработки информации, связанных с модулями 10 и 11 непрерывных каналов внешних устройств через межмодульный интерфейс 1 (например, типа CAN). Сигналы от блока 9 датчиков пути и скорости, связанных с колесами локомотива, поступают в модули 7 и 8 измерения параметров движения, которые формируют значения фактической скорости и пройденного пути. Сигналы от приемника 14 спутниковой навигации через модуль 13 маршрута поступают в модули 7 и 8 измерения параметров движения, которые на основании этих сигналов и данных из электронной карты маршрута, хранящейся в модуле 13 маршрута, определяют местоположение поезда и расстояние до мест ограничения скорости или до мест остановки перед препятствием. По этим данным модули 5 и 6 центральной обработки информации вычисляют скоростной режим движения поезда, сравнивают с допустимой скоростью и принимают, при необходимости, решения о режиме торможения.
Информация, касающаяся безопасности движения поезда, дублируется в модулях 5 и 6 центральной обработки информации, и циклически проверяется на соответствие безопасной схемой 4 контроля. При нарушении соответствия, безопасная схема 4 контроля воздействует на усилитель 2 электропневматического клапана 3 и, отключая питание электропневматического клапана 3, обеспечивает экстренное торможение поезда. Если в модулях 5 и 6 центральной обработки информации нет информации о получении разрешения проезда границы занятого участка пути, то после пересечения границы занятого участка пути они также воздействуют на усилитель 2 электропневматического клапана 3 и отключением его питания вызывают экстренное торможение поезда.
В процессе движения поезда блок 18 контроля бдительности, через межмодульный интерфейс 1 и блок 17 кодирования/декодирования сообщений, выдает на блок 19 интерфейса машиниста сигнал на подтверждение бдительности. Машинист подтверждает свою бдительность нажатием рукоятки 20 бдительности, сигналы с выходов которой поступают на вход блока 18 контроля бдительности и на блок 19 интерфейса машиниста, который через блок 17 кодирования/декодирования сообщений и межмодульный интерфейс 1 передает эту информацию в модули 5 и 6 центральной обработки информации. При отсутствии подтверждения бдительности безопасная схема 4 контроля воздействует на усилитель 2 электропневматического клапана 3. При отключении питания электропневматического клапана 3 происходит экстренное торможение поезда. В процессе управления поездом машинист запрашивает разрешение диспетчера на выполнение стандартных действий по управлению движением поезда, в предусмотренных инструкциями ситуациях, путем нажатия соответствующих клавиш функциональной клавиатуры, входящей в состав блока 19 интерфейса машиниста.
Радиосигналы через радиомодем 16 поступают в модуль 15 радиоканала, который выделяет из них кодированную цифровую информацию, передаваемую из диспетчерского центра управления движением. В обратном направлении в диспетчерский центр управления поступает кодированная информация, связанная с передачей параметров движения поезда и с запросами к поездному диспетчеру от машиниста поезда. В частности, при запросе от машиниста к поездному диспетчеру на разрешение проезда границы занятого путевого участка, на первый вход блока 17 кодирования/декодирования сообщений, содержащего координатно-временную информацию, поступает команда от блока 19 интерфейса машиниста. По команде на втором входе блока 17 кодирования/декодирования сообщений с выхода приемника спутниковой навигации 14 считывается координата и текущее время соответствующие моменту нажатия клавиши функциональной клавиатуры. Они используются блоком 17 кодирования/декодирования сообщений как часть кодированного запроса, который блок 17 кодирования/декодирования сообщений формирует и через межмодульный интерфейс 1, модуль радиоканала 15 и радиомодем 16 передает в центр диспетчерского управления. При декодировании сообщения в аппаратуре центра диспетчерского управления эта часть информации сопоставляется с информацией о местонахождении поезда в текущий момент времени, получаемой от напольных устройств ДЦ (рельсовые цепи, счетчики осей, считыватели номеров вагонов и т.д.). Этим обеспечивается дополнительный контроль правильности приходящей с локомотива информации. При передаче команды разрешающей проследование границы занятого блок - участка координата и текущее время из запроса служит ключом для кодирования сообщения. Одновременно с разрешением на локомотив поступает информация о длительности периода времени, в течение которого разрешение действует. При этом отсчет времени производится от момента времени передачи исходного запроса с поезда. На локомотиве блок 17 кодирования/декодирования сообщений, содержащий координатно-временную информацию, получает сообщение от поездного диспетчера и использует координатно-временную информацию из исходного запроса в качестве ключа для декодирования ответа от диспетчера.
Модули 5 и 6 центральной обработки информации определяют скорость сближения с препятствием, вид и поведение препятствия для отображения ситуации машинисту блоком 19 интерфейса машиниста. В зависимости от выбранных алгоритмов эти данные используются для информирования машиниста с проверкой его бдительности, например, посредством требований нажатия рукоятки 20 бдительности и/или для подачи предупредительных гудков и речевых и световых сигналов (или, например, специальных сигналов отпугивания крупных животных), и/или активизации средств предупреждения столкновения (подушки безопасности, выдвижные бамперы и т.д.), и/или автоматического экстренного торможения поезда. Аналогичные действия выполняются устройством автоматически при беспилотным режиме ведения поезда.
Процессоры 26 и 27 в блоке 21 поддержки беспилотного режима ведения поезда управляют работой первого 23 и второго 24 блоков датчиков обнаружения и позиционирования препятствий на пути перед поездом, а также модулей 28 и 29 контролируемых искусственных нейронных сетей (ИНС) и модулей 30, 31 жесткого логического контроля качества расчёта ИНС, а также управляют обменом информацией этих модулей с соответствующими модулями 5 и 6 центральной обработки информации.
Блок 21 поддержки беспилотного режима ведения поезда автоматически распознает препятствия на пути движения поезда, вычисляет их координаты и распознает эксплуатационные ситуации для выработки исторически оправданных режимов ведения, используя при этом данные хранящиеся в модуле 25 памяти, в котором записана база данных актуальной истории движения по маршрутам следования поезда.
Модули 28 и 29 контролируемых ИНС по синхронным периодическим запросам от модулей 5 и 6 центральной обработки информации МЦО, не реже чем каждые 0.25 сек, выдают пакеты цифровых данных с результатами своей работы для дальнейшего использования в модулях 5 и 6 центральной обработки информации. Модули 28 и 29 контролируемых ИНС выдают эти данные только при условии разрешений от соответствующих первого 30 и второго 31 модулей жесткого логического контроля качества расчёта ИНС. Модули 30 и 31 каждый раз перед выдачей разрешений соответствующим модулям 28 и 29 контролируемых ИНС тестируют правильность их работы на наборах данных полученных при распознавании выделенных опорных объектов придорожной инфраструктуры по маршрутам движения и образцовых паттернов управления движением поезда, выработанных заранее при тренировочных и реальных исторических эксплуатационных ситуациях. Эти наборы данных хранятся в базе данных модуля 25 памяти.
Если пакеты данных, полученные модулями 5 и 6 центральной обработки информации из блока 21 проходят проверку на совпадение безопасной схемой 4 контроля, то полученная от блока 21 модулями 5 и 6 информация используется для управления движением поезда, а если не проходят проверку, то эта информация отклоняется.
В беспилотном режиме ведения поезда, в процессе работы блока 21, модули 28 и 29 контролируемых ИНС выдают результаты своей работы для дальнейшего использования в модулях 5 и 6 центральной обработки информации с добавлением проверочной информации от соответствующих модулей 30, 31. Эти данные синхронно запрашиваются из блока 21 поддержки беспилотного режима ведения поезда модулями 5 и 6 центральной обработки информации, например, не реже чем каждые 0.25 сек. По этим запросам результаты работы модулей в блоке 21 поддержки беспилотного режима ведения поезда синхронно передаются в интерфейс 1 в виде кодовых векторов, содержащих рабочую и контрольную информацию. Алгоритмы обработки информации процессорами 26 и 27 также как и структуры и алгоритмы работы управляемых ими модулей 28-31 и используемые ими данные из базы данных модуля 25 памяти для достижения требований полноты безопасности выполнены максимально различными и не зависимыми друг от друга на всех программных и аппаратных путях преобразования их к конечному результату, являются разными и максимально независимыми друг от друга. Это обеспечивает возможность до синхронной проверки полного совпадения этих векторов модулями 5 и 6 центральной обработки информации вместе с безопасной схемой 4 контроля, снизить вероятность одинаковых ошибок в каналах обработки информации, вызывающих опасные отказы до требований полноты безопасности на уровне SIL4. Только конечные результаты работы блока 21, передаваемые в модули 5 и 6 центральной обработки информации, для возможности проверки на совпадение безопасной схемой 4 контроля приводятся к сопоставимому виду.
После синхронной проверки полного совпадения этих данных, они в каждом очередном цикле между проверками независимо могут использоваться модулями 5 и 6 центральной обработки информации для решения задач беспилотного режима ведения поезда.
Таким образом, предлагаемое изобретение позволяет расширить область применения за счет обеспечения возможности беспилотного вождения поездов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство контроля за управлением локомотивом | 2022 |
|
RU2790738C1 |
| Система контроля за управлением локомотивом попутно следующих поездов | 2024 |
|
RU2823661C1 |
| Система обеспечения безопасности на железнодорожном транспорте | 2020 |
|
RU2761763C1 |
| Способ управления рельсовым транспортным средством и система для его реализации | 2024 |
|
RU2830326C1 |
| Устройство контроля за управлением поезда и бдительностью машиниста | 2019 |
|
RU2718621C1 |
| УСТРОЙСТВО КОНТРОЛЯ ЗА УПРАВЛЕНИЕМ ПОЕЗДА И БДИТЕЛЬНОСТЬЮ МАШИНИСТА | 2009 |
|
RU2423269C1 |
| УСТРОЙСТВО КОНТРОЛЯ ЗА УПРАВЛЕНИЕМ ПОЕЗДА И БДИТЕЛЬНОСТЬЮ МАШИНИСТА | 2011 |
|
RU2499713C2 |
| УСТРОЙСТВО КОНТРОЛЯ ЗА УПРАВЛЕНИЕМ ПОЕЗДА И БДИТЕЛЬНОСТЬЮ МАШИНИСТА | 2012 |
|
RU2497704C2 |
| СПОСОБ УПРАВЛЕНИЯ РЕЛЬСОВЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2518670C2 |
| Система управления движением поездов в режиме виртуальной сцепки | 2024 |
|
RU2828911C1 |
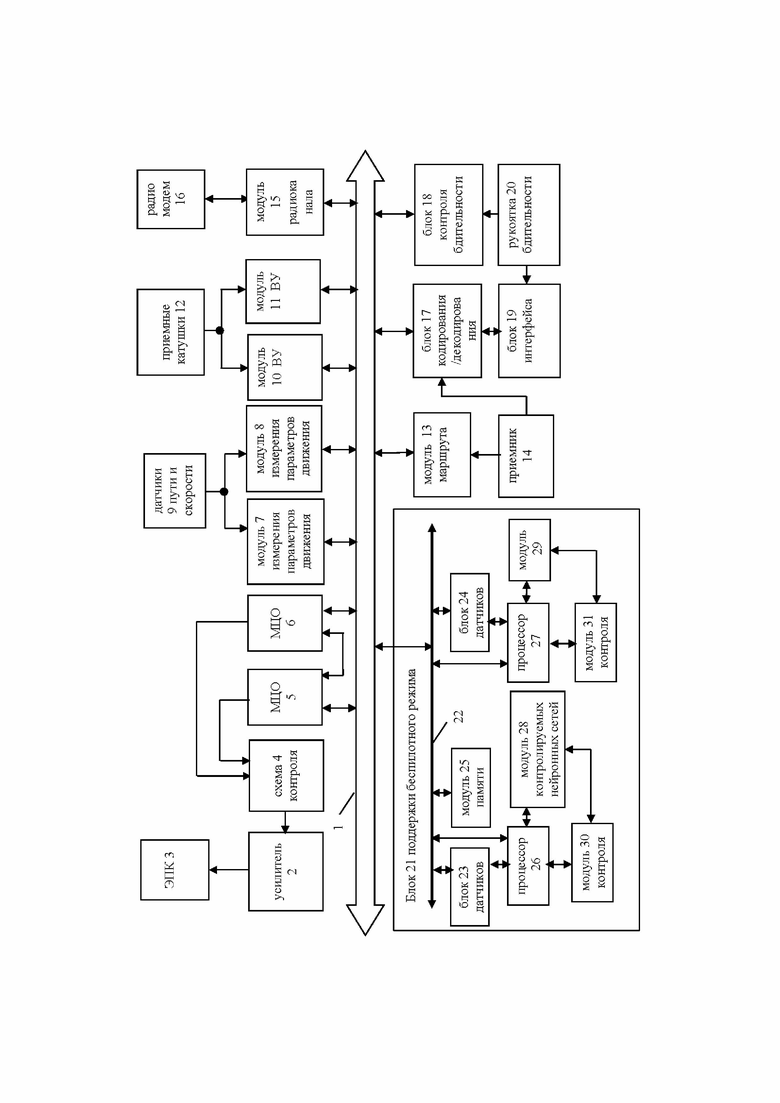
Изобретение относится к средствам управления локомотивом и контроля за бдительностью машиниста. Устройство содержит межмодульный интерфейс (1), усилитель (2) электропневматического клапана (3) (ЭПК), безопасную схему (4) контроля, модули (5) и (6) центральной обработки информации (МЦО), два модуля (7) и (8) измерения параметров движения, блок (9) датчиков пути и скорости, два модуля (10) и (11) непрерывных каналов внешних устройств (ВУ), приемные катушки (12) АЛСН и АЛС-ЕН, модуль (13) маршрута, приемник (14) спутниковой навигации, модуль (15) радиоканала, радиомодем (16), блок (17) кодирования/декодирования сообщений, блок (18) контроля бдительности, блок (19) интерфейса машиниста, рукоятку (20) бдительности, блок (21) поддержки беспилотного режима ведения поезда, состоящий из подключенных к внутреннему интерфейсу (22) связи двух блоков (23) и (24) датчиков обнаружения и позиционирования препятствий на пути перед поездом, и модуля (25) памяти с записанной в нем базой данных актуальной истории движения по маршрутам следования поезда, процессоры (26) и (27) обработки паттернов сигналов, отраженных от возможных препятствий и от выделенных объектов придорожной инфраструктуры, модули (28) и (29) контролируемых искусственных нейронных сетей распознавания препятствий и паттернов эксплуатационных ситуаций по управлению движением поезда, модули (30) и (31) жесткого логического контроля качества расчёта. Достигается расширение функциональных возможностей за счет обеспечения беспилотного вождения поездов. 1 ил.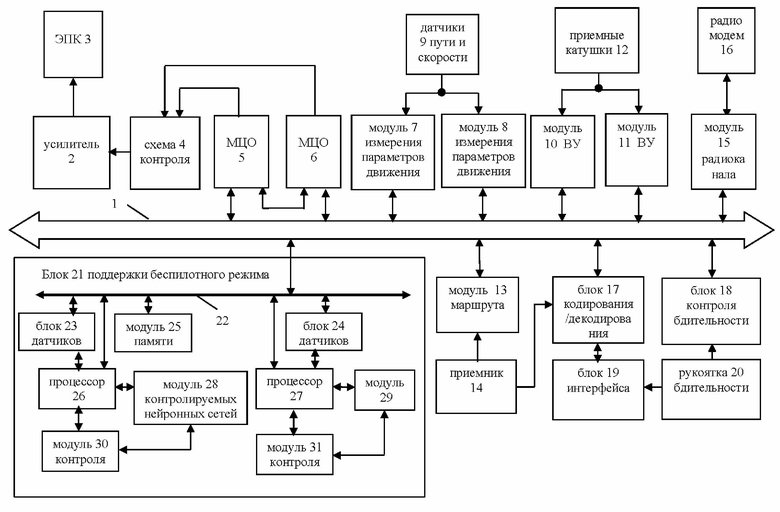
Устройство контроля за управлением локомотивом и бдительностью машиниста, содержащее межмодульный интерфейс, усилитель электропневматического клапана, выход которого соединен с входом электропневматического клапана, а вход - с выходом безопасной схемы контроля, входы которой соединены с соответствующими выходами двух модулей центральной обработки информации, которые соединены между собой и подключены своими портами к межмодульному интерфейсу, к которому подключены два модуля измерения параметров движения, входы которых соединены с блоком датчиков пути и скорости, два модуля непрерывных каналов внешних устройств, входы которых соединены с приемными катушками АЛСН и АЛС-ЕН, модуль маршрута, соединенный с первым выходом приемника спутниковой навигации, модуль радиоканала, порт которого соединен с радиомодемом, блок кодирования/декодирования сообщений и блок контроля бдительности, второй выход приемника спутниковой навигации соединен с входом блока кодирования/декодирования сообщений, первый порт которого соединен с блоком интерфейса машиниста, а второй порт подключен к межмодульному интерфейсу, причем блок контроля бдительности соединен с рукояткой бдительности, которая подключена к блоку интерфейса машиниста, отличающееся тем, что оно снабжено блоком поддержки беспилотного режима ведения поезда, состоящего из подключенных к внутреннему интерфейсу связи двух блоков датчиков обнаружения и позиционирования препятствий на пути перед поездом и модуля памяти с записанной в нем базой данных актуальной истории движения по маршрутам следования поезда, порт связи каждого блока датчиков обнаружения и позиционирования препятствий на пути перед поездом подключен к порту связи соответствующего процессора обработки паттернов сигналов, отраженных от возможных препятствий и от выделенных объектов придорожной инфраструктуры, к другим портам связи которого подключены соответственно модуль контролируемых искусственных нейронных сетей распознавания препятствий и паттернов эксплуатационных ситуаций по управлению движением поезда и модуль жесткого логического контроля качества расчёта, при этом модули соединены между собой линией связи, дополнительный порт связи каждого процессора обработки паттернов сигналов, отраженных от возможных препятствий и от выделенных объектов придорожной инфраструктуры, подключен к внутреннему интерфейсу связи, который соединен с межмодульным интерфейсом устройства.
| Устройство для контроля величины дуги упругого скольжения ленты на приводном барабане ленточного конвейера | 1960 |
|
SU133799A1 |
| СПОСОБ, УСТРОЙСТВО И ЖЕЛЕЗНОДОРОЖНОЕ ТРАНСПОРТНОЕ СРЕДСТВО, В ЧАСТНОСТИ РЕЛЬСОВОЕ ТРАНСПОРТНОЕ СРЕДСТВО, ДЛЯ АНАЛИЗА ИЗОБРАЖЕНИЙ НА БАЗЕ КОЛЕИ В ЖЕЛЕЗНОДОРОЖНОМ СООБЩЕНИИ, В ЧАСТНОСТИ ДЛЯ АНАЛИЗА ИЗОБРАЖЕНИЙ НА БАЗЕ РЕЛЬСОВОГО ПУТИ В РЕЛЬСОВОМ СООБЩЕНИИ | 2017 |
|
RU2720303C1 |
| WO 2018104454 A2, 14.06.2018 | |||
| WO 2018104460 A1, 14.06.2018. | |||

