ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
[0001] Данная заявка испрашивает приоритет на заявку поданную 20 ноября 2015 г. в США №62/257861, которая полностью включена в данный документ посредством ссылки.
УРОВЕНЬ ТЕХНИКИ
[0002] Область изобретения
[0003] Изобретение в целом относится к линейным двигателям с постоянными магнитами, а более конкретно к средствам для контроля усилия, создаваемого линейным двигателем с постоянными магнитами, определения существования условия срыва подачи и управления двигателем для предотвращения удара плунжера насоса по жидкости, вызванного срывом подачи.
[0004] Предшествующий уровень техники
[0005] При добыче нефти из скважин часто возникает необходимость использования системы насосно-компрессорной добычи для поддержания потока нефти. В системах насосно-компрессорной добычи для подъема нефти из скважины могут использоваться насосы различных типов. Например, в некоторых обычных установках используются штанговые подъемные системы, в которых для приведения в действие линейного насоса в скважине, двигатель, расположенный на поверхности, возвратно-поступательно перемещает насосную штангу вверх и вниз. В других установках используются погружные электронасосы (ПЭН), в которых двигатель и насос расположены в скважине для нагнетания нефти из скважины.
[0006] В системе насосно-компрессорной добычи, в которой для подъема нефти из скважины используется линейный двигатель с постоянными магнитами, может оказаться полезным определять величину усилия, которое будет создаваться системой. Данная информация может использоваться, например, для регулировки скорости, с которой работает двигатель системы. Величина усилия, создаваемого двигателем, также может использоваться для определения того, столкнулся ли насос с газовой порой или приближается состояние срыва подачи. Срыв подачи происходит из-за изменения объема флюида в скважине в процессе эксплуатации. Данное изменение объема флюида в скважине является закономерным явлением и может возникать по нескольким причинам, таким как изменение уровня нефтеносного пласта, искусственное стимулирование скважины в течение длительного времени и т.д. Во время срыва подачи большая часть столба флюида может быть заполнена газом, а не жидкостью/нефтью. В таких условиях движитель может столкнуться с участками пустых пространственных/газовых пор, через которые он будет двигаться как свободно падающее тело, прежде чем он столкнется с какой-либо жидкостью, что будет происходить с большим, чем ожидалось, ударом или усилием. Внезапное резкое изменение усилий/ нагрузки в пределах хода (называемое ударом плунжера насоса по жидкости) может вызвать значительные нагрузки на колонну ПЭН, а также может повредить двигатель или сократить его эксплуатационный срок службы.
[0007] В обычной насосной системе, в которой используется насосная штанга, в состав системы для измерения нагнетательного усилия необходимо включить тензометрический датчик или какой-либо другой датчик механической нагрузки. Для данного компонента измерения нагрузки системы необходимо устройство для измерения усилия, а также физический узел на штанговом скважинном насосе. Это делает всю систему более громоздкой и дорогостоящей.
[0008] Поэтому было бы желательно обеспечить системы и способы для определения силы, создаваемой ПЭН, который управляется линейным двигателем с постоянными магнитами, обнаружения условий срыва подачи на основании усилия и управления двигателем для предотвращения удара плунжера насоса по жидкости, который может возникнуть в результате срыва подачи.
КРАТКОЕ ОПИСАНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[0009] Данное изобретение относится к системам и способам для определения существования условия срыва подачи в системе ПЭН путем контроля тока, потребляемого двигателем ПЭН, определения мгновенного усилия, создаваемого двигателем, и определения условия срыва подачи на основе относительно внезапных уменьшений создаваемого усилия. Затем двигателем управляют, чтобы предотвратить возникновение удара плунжера насоса по жидкости, который обычно возникает из-за условия срыва подачи.
[0010] Одним вариантом реализации изобретения является система ПЭН, установленная в скважине. Система содержит электрический привод, расположенный на поверхности скважины, и кабель электропитания, подключенный между электрическим приводом и ПЭН. Электрический привод содержит датчики тока, установленные на его выходе, для измерения тока каждой фазы выходной мощности переменного тока, подаваемой на линейный двигатель ПЭН. Привод содержит контроллер, который принимает результаты измерений мгновенного тока от датчиков тока и определяет вектор мгновенного тока для каждой из фаз выходной мощности. Затем контроллер определяет мгновенное усилие, создаваемое двигателем, на основании векторов мгновенного тока. Например, контроллер может определить мгновенное усилие путем вычисления среднеквадратичного значения векторов мгновенного тока и умножения этого значения на постоянный коэффициент мощности.
[0011] Во время рабочего хода линейного двигателя контроллер вычисляет мгновенное усилие в каждый из множества моментов времени и определяет, существует ли условие срыва подачи. В ответ на определение, что существует условие срыва подачи, контроллер повторно включает линейный двигатель. В одном варианте реализации изобретения контроллер определяет, существует ли условие срыва подачи путем определения того, является ли мгновенное усилие в соответствующий момент времени меньше заданного порогового значения (например, 35% от мгновенного усилия, созданного двигателем в указанный предыдущий момент времени). Можно также определить условие срыва подачи, когда мгновенное усилие находится между первым пороговым значением усилия и немного более высоким пороговым значением (например, 75% мгновенного усилия, создаваемого двигателем в предыдущий момент времени), причем двигатель не находится в фазе ускорения рабочего хода. Если мгновенное усилие находится между этими пороговыми значениями, и двигатель не находится в фазе ускорения, контроллер может увеличить счетчик сбоев при малом усилии и повторно включить линейный двигатель в случае, когда счетчик сбоев при малом усилии достигнет порогового значения. В качестве варианта, контроллер может определять, что существует условие срыва подачи в случае, когда мгновенное усилие, создаваемое двигателем в фазе ускорения, меньше минимального усилия, зарегистрированного в течение времени задержки двигателя. Когда контроллер повторно включает двигатель, он может осуществлять шаговое движение линейного двигателя на протяжении оставшейся части рабочего хода в управляемом режиме до повторного включения двигателя. Контроллер может осуществить установку двигателя в положение в конце рабочего хода и обеспечить задержку в течение заданного интервала времени в конце рабочего хода (например, в несколько раз больше обычного времени задержки) до начала повторного включения двигателя.
[0012] Также возможны многочисленные другие варианты реализации изобретения.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
[0013] Другие объекты и преимущества изобретения могут стать очевидными после прочтения нижеследующего подробного описания и со ссылкой на прилагаемые графические материалы.
[0014] На Фиг. 1 проиллюстрирован чертеж, поясняющий иллюстративную насосную систему в соответствии с одним вариантом реализации изобретения.
[0015] На Фиг. 2 проиллюстрирован чертеж, поясняющий иллюстративный линейный двигатель в соответствии с одним вариантом реализации изобретения, который был бы подходящим для использования в насосной системе на Фиг. 1.
[0016] На Фиг. 3 проиллюстрирована функциональная блок-схема, поясняющая структуру системы управления для линейного двигателя в соответствии с одним вариантом реализации изобретения.
[0017] На Фиг. 4 проиллюстрирована блок-схема, поясняющая способ обнаружения условий срыва подачи в ПЭН и управления двигателем ПЭН для предотвращения удара плунжера насоса по жидкости в соответствии с одним вариантом реализации изобретения.
[0018] На Фиг. 5А и 5В проиллюстрированы блок-схемы, поясняющие более подробно способ, проиллюстрированный на Фиг. 4.
[0019] Хотя изобретение подвержено различным модификациям и альтернативным формам, его конкретные варианты реализации проиллюстрированы в качестве примера на графических материалах и в прилагаемом подробном описании. Однако следует понимать, что графические материалы и подробное описание не предназначены для ограничения изобретения конкретным описанным вариантом реализации. Напротив, данное изобретение предназначено для того, чтобы охватить все модификации, эквиваленты и альтернативные варианты, попадающие в рамки объема данного изобретения, как определено в прилагаемой формуле изобретения. Кроме того, графические материалы могут быть выполнены без соблюдения масштаба и на них может быть увеличен один или большее количество компонентов, чтобы облегчить понимание различных признаков, описанных в данной заявке.
ПОДРОБНОЕ ОПИСАНИЕ ПРИМЕРНЫХ ВАРИАНТОВ РЕАЛИЗАЦИИ ИЗОБРЕТЕНИЯ
[0020] Далее описываются один или большее количество иллюстративных вариантов реализации изобретения. Следует отметить, что эти и любые другие описанные ниже варианты реализации изобретения, являются иллюстративными и предназначены для пояснения изобретения, а не для его ограничения.
[0021] Как описано в данной заявке, различные варианты реализации изобретения включают системы и способы для предотвращения удара плунжера насоса по жидкости в системе ПЭН, в которой используется линейный двигатель с постоянными магнитами и поршневой насос. Это включает в себя определение усилия, создаваемого двигателем в заданный момент времени, на основании векторов мгновенного тока мощности, подаваемой на двигатель, путем сравнения усилия в двух или более точках рабочего хода двигателя для определения изменений, которые указывают на условия срыва подачи, и управления двигателем в ответ на обнаружение условий срыва подачи, чтобы предотвратить удар плунжера насоса по жидкости.
[0022] В одном варианте реализации изобретения двигатель приводится в действие с помощью трехфазной мощности, получаемой от системы привода на поверхности скважины. Система привода контролирует ток, потребляемый двигателем. Мгновенные значения тока для каждой из трех фаз определяются с использованием аналого-цифровых преобразователей (АЦП), а квадратный корень извлекают из суммы квадратов этих мгновенных фазных токов, разделенных на три. Это создает вектор мгновенного тока (ICV), который умножают на постоянный коэффициент усилия, связанный с рассматриваемым двигателем, чтобы получить мгновенное значение усилия. Усилие может быть определено таким образом для любого момента времени и, в данном варианте реализации изобретения, вычисляется при каждом переходе сигнала датчика Холла, принимаемого от двигателя, в новое состояние. Вычисления усилия для последовательных переходов сигнала датчика Холла в новое состояние сравниваются, чтобы определить, уменьшается ли усилие более чем на определенную процентную величину (например, 65 процентов). В случае, когда обнаружено такое уменьшение усилия в сочетании с положением движителя в пределах хода, это может указывать на условие срыва подачи, при этом двигатель работает в управляемом режиме (например, вместо автоматического переключения осуществляется шаговое движение движителя вниз с пониженной скоростью), чтобы предотвратить перемещение движителя и/или насоса с высокой скоростью в контакте с жидкостью и/или остановкой с резким торможением, что позволяет предотвратить удар плунжера насоса по жидкости.
[0023] Настоящие системы и способы для обнаружения срыва подачи и предотвращения удара плунжера насоса по жидкости имеют ряд преимуществ по сравнению с предшествующим уровнем техники. Например, в данных системах и способах нет необходимости в физических датчиках нагрузки или других физических узлах, необходимых в традиционных системах с насосными штангами. Таким образом, настоящие системы и способы являются более простыми и менее дорогостоящими, по сравнению с обычными системами с насосными штангами. Настоящие системы и способы могут быть реализованы в системах электрического привода, причем способы могут выполняться посредством системы управления приводом без вмешательства человека. Поэтому способы могут выполняться более быстро и эффективно, по сравнению с обычными способами.
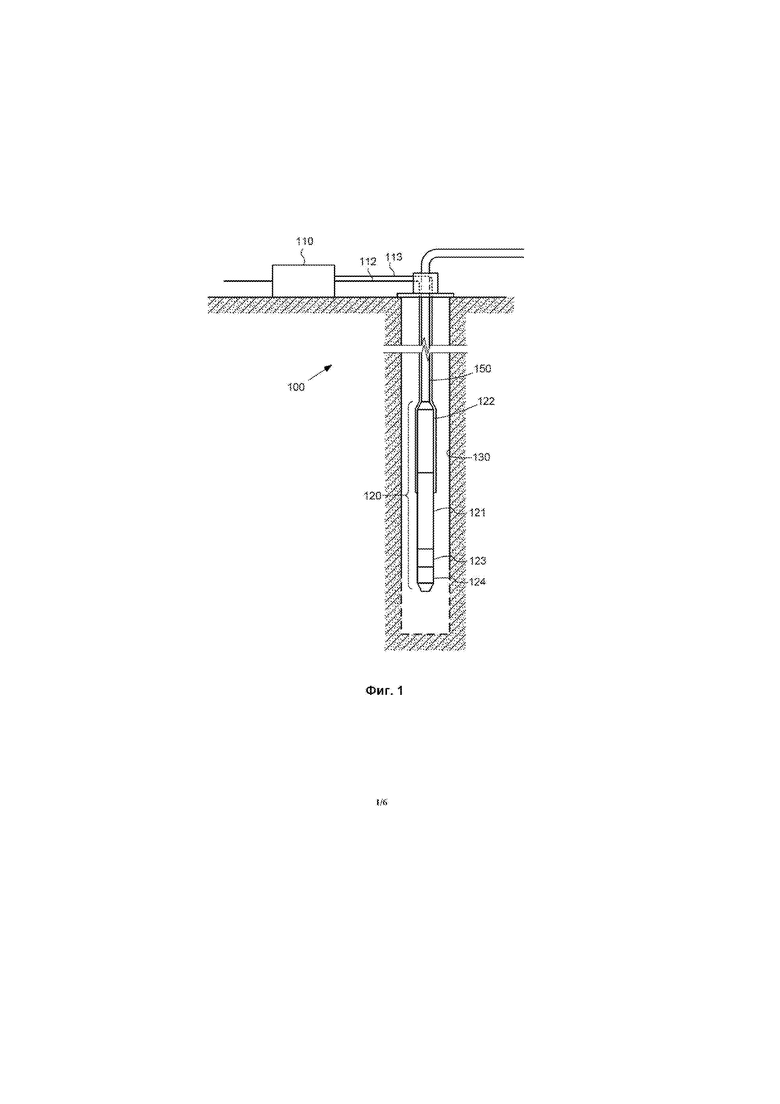
[0024] Со ссылкой на Фиг. 1 проиллюстрирован чертеж, поясняющий иллюстративную насосную систему 100 в соответствии с одним вариантом реализации данного изобретения. Ствол скважины 130 пробурен в нефтеносной геологической структуре, при этом ствол скважины обсажен обсадной колонной. Обсадная колонна в стволе скважины 130 перфорирована в продуктивной зоне скважины, чтобы обеспечить протекание нефти из пласта в скважину. Насосная система 120 расположена в продуктивной зоне скважины. Насосная система 120 соединена с эксплуатационной насосно-компрессорной колонной 150, посредством которой система откачивает нефть из скважины. Система управления 110 расположена на поверхности скважины. Система управления 110 соединена с насосом 120 посредством кабеля электропитания 112 и комплекта электрических линий передачи данных 113, которые могут передавать данные датчиков и данные управления различных типов между системой скважинных насосов и наземным оборудованием управления. Кабель электропитания 112 и электрические линии ИЗ проходят по стволу скважины вдоль колонны насосно-компрессорных труб 150.
[0025] Насос 120 содержит секцию электродвигателя 121 и секцию насоса 122. В данном варианте реализации изобретения система содержит расширительную камеру 123 и комплект приборов 124. (Насосная система 120 может содержать различные другие компоненты, которые в данной заявке не будут описаны подробно, поскольку они хорошо известны из предшествующего уровня техники и не важны для обсуждения изобретения). Секция электродвигателя 121 получает питание от системы управления 110 и приводит в действие секцию насоса 122, которая нагнетает нефть через насосно-компрессорную колонну и из скважины.
[0026] В данном варианте реализации изобретения секция электродвигателя 121 является линейным двигателем с постоянными магнитами. Система управления 110 принимает входную мощность переменного тока от внешнего источника, такого как генератор (не показан на фигуре), выпрямляет входную мощность переменного тока и затем преобразует мощность постоянного тока для создания трехфазной выходной мощности переменного тока, которая подходит для приведения в действие линейного двигателя управляемым способом. Выходная мощность, генерируемая системой управления 110, частично зависит от положения движителя внутри статора линейного двигателя. Датчики положения в двигателе определяют положение движителя и передают эту информацию через электрические линии 113 к системе управления 110 так, чтобы движитель двигался в соответствующем направлении (как будет более подробно описано ниже). Выходная мощность, генерируемая системой управления 110, подается в насосную систему 120 через кабель электропитания 112.
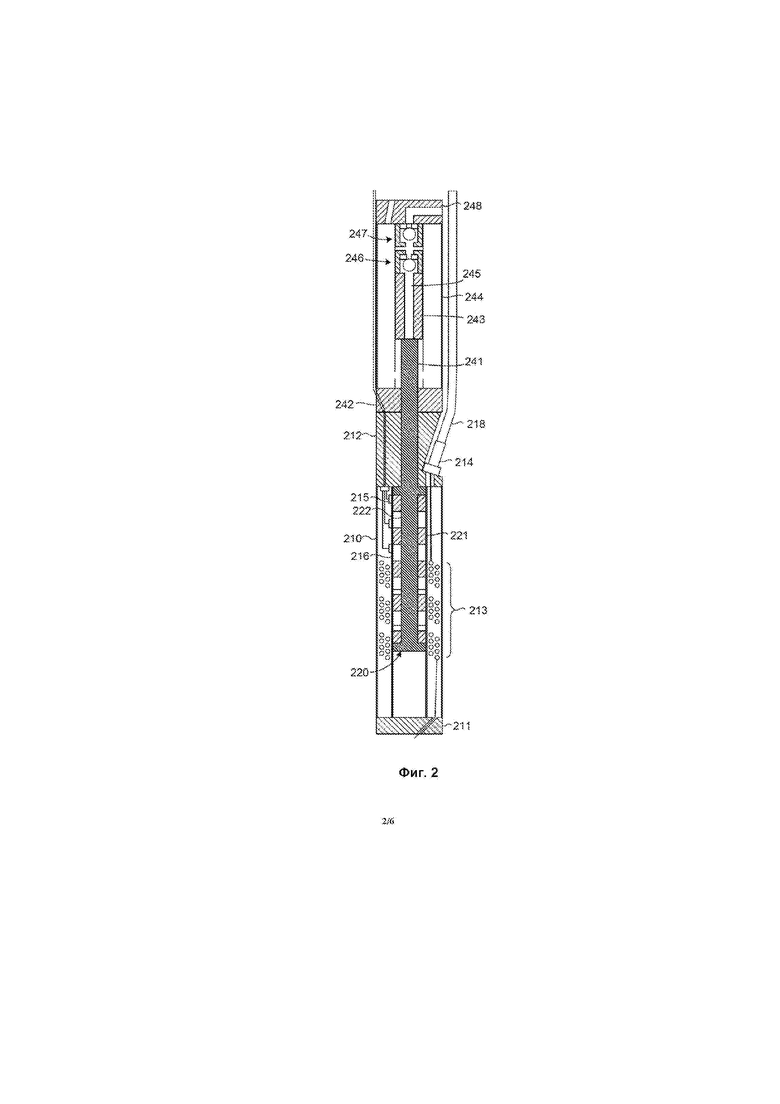
[0027] Со ссылкой на Фиг. 2, проиллюстрирован чертеж, поясняющий работу иллюстративного линейного двигателя и насоса, которые пригодны для использования в системе, проиллюстрированной на Фиг. 1. Следует отметить, что в альтернативных вариантах реализации изобретения могут использоваться различные конструкции двигателя и насоса. В данном варианте реализации изобретения линейный двигатель 200 содержит цилиндрический статор 210, который по центру имеет отверстие. Основание 211 соединено с нижним концом статора 210, чтобы закрыть нижний конец отверстия, при этом головка 212 соединена с верхним концом статора. Головка двигателя 212 содержит сквозное отверстие, которое обеспечивает прохождение вала 222 движителя 220 к насосу 240. В данном варианте реализации изобретения насос выполнен с возможностью втягивать флюид в насос при движении поршня вверх и вытеснять флюид при движении поршня вниз. Иными словами, движение поршня вниз - это рабочий ход, а движение поршня вверх - обратный ход.
[0028] Статор 210 содержит несколько катушек (например, 213) из электропроводящего обмоточного провода, которые расположены вокруг внутреннего опорного сердечника 216, который образует отверстие статора. Катушки образуют множество полюсов внутри статора. Количество катушек и количество полюсов может варьироваться от одного варианта реализации изобретения к другому. Концы обмоток соединены (например, посредством соединительного разъема 214) с проводниками кабеля электропитания 218. Хотя силовой кабель имеет отдельные проводники, которые передают энергию к двигателю, для простоты и ясности на фигуре проводники не показаны отдельно.
[0029] На обмотки поочередно подается ток, принимаемый через кабель электропитания, для генерации магнитных полей внутри статора. Эти магнитные поля взаимодействуют с постоянными магнитами 221 на валу 222 движителя 220, вызывая перемещение движителя 220 вверх и вниз внутри двигателя. Форма сигнала, подаваемого приводом через кабель электропитания, управляется движителем привода 220, совершающим возвратно-поступательное движение внутри отверстия статора 210. Статор 210 может содержать один или большее количество датчиков эффекта Холла 215 для контроля электрического положения движителя 220 в статоре 210.
[0030] Насос 240 является поршневым насосом плунжерного типа, который приводится в действие двигателем 200. Насос имеет основание 242, которое прикреплено к головке двигателя 212. Основание насоса 242 соединено с нижним концом внешнего корпуса 244, а головка двигателя 248 соединена с верхним концом корпуса. Внутренний цилиндр 245 насоса расположен внутри внешнего корпуса 244. Соединительная штанга 241 проходит от движителя 220 через основание насоса 242 во внутренний цилиндр 245. Плунжер 243 соединен с верхним концом соединительной штанги. Плунжер 243 содержит нагнетательный клапан 246, который открывается, когда плунжер перемещается вверх и закрывается, когда плунжер перемещается вниз. Всасывающий клапан 247 открывается, когда плунжер перемещается вниз и закрывается, когда плунжер перемещается вверх.
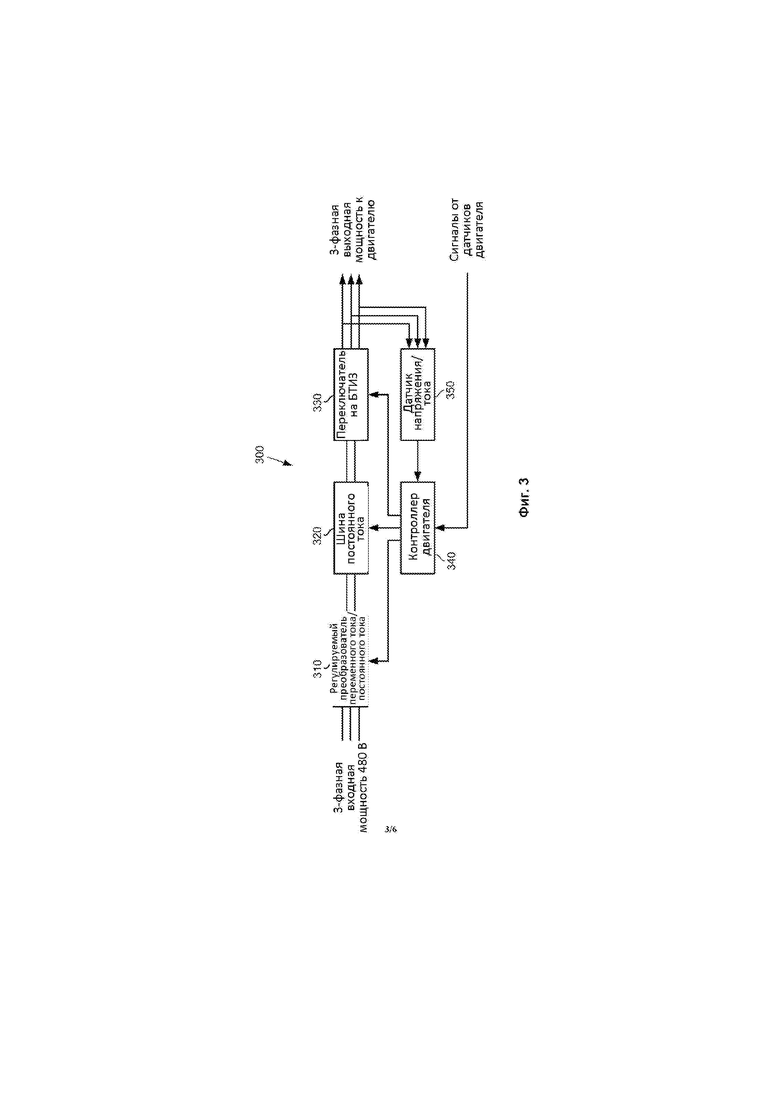
[0031] Со ссылкой на Фиг. 3 проиллюстрирована функциональная блок-схема, поясняющая структуру системы управления для линейного двигателя в соответствии с одним вариантом реализации изобретения. Система управления выполнена как единое целое с системой привода для линейного двигателя. Система привода принимает входную мощность переменного тока от внешнего источника и генерирует трехфазную мощность переменного тока, которая подается на линейный двигатель. Система привода также контролирует ток, потребляемый двигателем, и использует векторы мгновенного тока для определения мгновенной силы, создаваемой двигателем. Если мгновенное усилие указывает на то, что имеет место удар плунжера насоса по жидкости, контроллер изменяет конфигурацию коммутации двигателя на более контролируемую, что влияет на нормальную работу двигателя (например, шаговое движение двигателя на протяжении всего рабочего хода).
[0032] Как проиллюстрировано на Фиг. 3, система 300 привода содержит регулируемый преобразователь переменного тока/постоянного тока, который принимает входную мощность переменного тока от внешнего источника питания. Входная мощность может быть, например, трехфазной мощностью напряжения 480 В. Схема 310 преобразует принятую мощность переменного тока в мощность постоянного тока и сохраняет эту мощность в шине постоянного тока 320. Мощность постоянного тока подается на вход секции инвертора 330, которая может использовать, например, переключатели на биполярных транзисторах с изолированным затвором (БТИЗ) для получения трехфазной выходной мощности с требуемым напряжением и частотой. Выходная мощность, создаваемая инвертором 330, передается в линейный двигатель скважины посредством кабеля электропитания.
[0033] Выходная мощность инвертора 330 контролируется датчиками напряжения и тока 350, установленными на выходе привода. Датчики 350 обеспечивают сигнал, который указывает значение тока, потребляемого линейным двигателем, в качестве входного сигнала для контроллера двигателя 340. Контроллер электродвигателя 340 может также принимать информацию от скважинного линейного двигателя (например, сигналы положения от датчиков эффекта Холла в двигателе) и/или другого оборудования, расположенного в скважине. Эта информация может быть предоставлена оператору, а также используется контроллером электродвигателя 340 для управления выходной мощностью, которая генерируется системой привода 300.
[0034] Контроллер двигателя 340 выполнен с возможностью определения моментального усилия, которое создается двигателем. Усилие может быть вычислено в любой момент времени. Вычисления усилия могут быть выполняться многократно и с очень короткими интервалами. В одном варианте реализации изобретения усилие вычисляется при каждом переходе сигнала Холла в новое состояние, хотя оно также может вычисляться и в другие моменты времени. В данной системе значения усилия, вычисленные для последовательных переходов Холла в новое состояние, сравниваются друг с другом, чтобы определить, усилие падает/внезапно возрастает. Например, хотя могут быть некоторые относительно небольшие изменения усилия, создаваемого двигателем во время рабочего хода, когда флюид подается насосом вверх по стволу скважины, внезапное относительно большое падение усилия указывает на то, что насос не полностью заполнен с жидкостью, тем самым снижая темп добычи (т.е. существует условие срыва подачи). В ответ на обнаружение большого падения вычисленного усилия контроллер двигателя запускает управляемый режим работы (например, шаговое движение двигателя на протяжении всего рабочего хода), чтобы предотвратить удар плунжера насоса по жидкости и повреждение, которое может быть вызвано ударом плунжера насоса по жидкости, а также смещение из заданного положения.
[0035] Со ссылкой на Фиг. 4, проиллюстрирована блок-схема, кратко поясняющая работу контроллера в отношении обнаружения срыва подачи в одном варианте реализации изобретения. Более подробная блок-схема данного процесса проиллюстрирована на Фиг. 5А и 5В.
[0036] Как проиллюстрировано на Фиг. 4, условия срыва подачи обнаруживаются только на протяжении рабочего хода. Во время обратного хода отсутствует риск повреждения из-за удара плунжера насоса по жидкости. Таким образом, процесс начинается с определения того, осуществляется ли рабочий ход/ход под нагрузкой двигателя (410). Во время рабочего хода контроллер контролирует усилие, создаваемое двигателем, и, в зависимости от усилия, определяет, существует ли условие срыва подачи (430). Это происходит в нескольких точках рабочего хода. Если условие срыва подачи не определяется, двигатель завершает рабочий ход и продолжает обратный ход (440). Если условие срыва подачи определяется контроллером, он повторно включает двигатель (450). После повторного включения двигателя возобновляется работа двигателя, при этом усилие, создаваемое двигателем во время рабочего хода, контролируется для определения условия срыва подачи.
[0037] Со ссылкой на Фиг. 5А и 5В, процесс обнаружения срыва подачи на протяжении рабочего хода двигателя в одном варианте реализации изобретения проиллюстрирован более подробно. Фиг. 5А иллюстрирует обнаружение условия срыва подачи, в то время как на Фиг. 5В проиллюстрировано повторное включение, которое инициализируется при обнаружении условия срыва подачи.
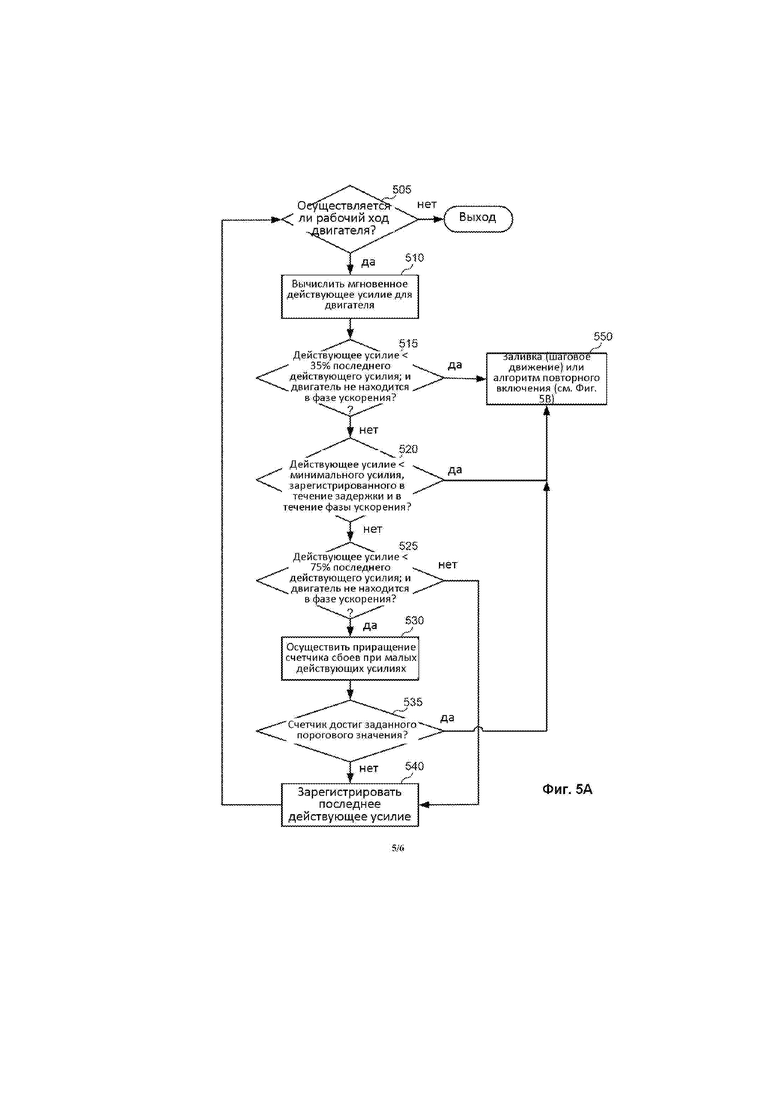
[0038] Со ссылкой на Фиг. 5А, процесс начинается с определения того, осуществляется ли рабочий ход двигателя (505). Как отмечено выше, обнаружение срыва подачи происходит только на протяжении рабочего хода, а не обратного хода. Если не осуществляется рабочий ход двигателя, алгоритм завершается. Если осуществляется рабочий ход двигателя, контроллер вычисляет усилие, которое в данный момент времени создается двигателем (510). В данном варианте реализации изобретения контроллер принимает комбинированный сигнал датчика Холла от двигателя, и усилие вычисляется каждый раз, когда происходит переход сигнала датчика Холла в новое состояние, что равносильно регулярным интервалам перемещения движителя. В других вариантах реализации изобретения усилие может быть вычислено в разные моменты или интервалы времени или в ответ на различные сигналы.
[0039] В данном варианте реализации изобретения контроллер контролирует ток, потребляемый линейным двигателем. Контроллер получает мгновенные значения тока для каждой из трех фаз выходной мощности и вычисляет среднеквадратичное значение этих мгновенных значений тока, как показано в приведенной ниже формуле 1.

где:
ICV = вектор мгновенного тока;
Ainst = мгновенный фазовый ток для фазы А;
Binst = мгновенный фазовый ток для фазы В;
Cinst = мгновенный фазовый ток для фазы С.
[0040] Затем среднеквадратичное значение умножают на постоянный коэффициент усилия для получения мгновенного усилия, создаваемого линейным двигателем. Это показано в приведенной ниже формуле 2.

где:
Kf = постоянный коэффициент усилия (или постоянная двигателя).
[0041] Каждый раз, при вычислении мгновенного усилия, создаваемого двигателем (текущее усилие), оно сохраняется таким образом, что его можно сравнить со следующим текущим значением усилия. Изменение вычисленного текущего значения усилия при переходе состояния датчика эффекта Холла из одного состояния к следующему используется для определения того, существует ли условие срыва подачи/удара плунжера насоса по жидкости. Это достигается путем выполнения нескольких проверок. Во-первых, определяют, является ли настоящее текущее значение усилие меньше заданной процентной величины от последнего текущего значения усилия, причем двигатель не находится в фазе ускорения (515). В данном случае этот нижний порог составляет 35%. Если вычисленное текущее значение усилия меньше 35% от последнего текущего значения усилия, усилие снижается на очень значительную величину (около двух третей или более), что указывает на то, что насос не нагнетает флюид, а вместо этого столкнулся с пустым столбом, заполненный газом - условие срыва подачи. Если усилие существенно снижается, контроллер инициализирует алгоритм заливки насоса (550). Данный алгоритм может, например, осуществлять шаговое движение движителя вниз на протяжении оставшейся части рабочего хода, дождаться заполнения столба флюида или отвести газ и повторно включить двигатель, как будет более подробно описано ниже в связи с Фиг. 5В.
[0042] Как отмечено выше, проверка на этапе 515 учитывает, находится ли двигатель в фазе ускорения. Это связано с тем, что во время ускорения двигатель может создавать гораздо более большие усилия, чем на протяжении оставшейся части рабочего хода. Поэтому контроллер позволяет двигателю завершить фазу ускорения перед сравнением вычисленных значений текущего усилия. Однако контроллер сравнивает вычисленное текущее значение усилия с минимальным усилием, которое измеряется во время интервалов времени задержки двигателя (520) во время фазы ускорения. Интервалы времени задержки - это интервалы времени в конце каждого хода, во время которых направление движителя изменяется на противоположное. Если текущее усилие во время ускорения меньше этого минимального усилия, то считается, что существует условие удара плунжера насоса по жидкости, и контроллер инициализирует алгоритм заливки/ повторного включения (550).
[0043] Контроллер также может обнаруживать условия срыва подачи, которые являются менее жесткими по сравнению с описанными выше условиями. Например, на этапе 525, если двигатель не находится в фазе ускорения, и текущее вычисленное значение действующего усилия падает до верхнего порогового значения 75% от последнего текущего значения усилия, но не меньше первого нижнего порогового значения (в данном примере - 35%), контроллер осуществляет приращение счетчика (530). Если счетчик достигает или превышает заданное число (535), тогда контроллер начнет алгоритм заливки/повторного включения (550). Если счетчик еще не достиг заданного числа, то контроллер обновляет последнее текущее значение усилия в соответствии с текущим значением действующего усилия (540) и продолжает контролировать усилие, создаваемое двигателем.
[0044] Следует также отметить, что в случае, когда ни одна из проверок срыва подачи не инициализирует алгоритм повторного включения, контроллер обновляет последнее текущее значение усилия в соответствии с текущим значением действующего усилия (540) и продолжает контролировать усилие двигателя, на протяжении рабочего хода двигателя.
[0045] Со ссылкой на Фиг. 5В, проиллюстрирована блок-схема, поясняющая иллюстративный алгоритм повторного включения. В данном примере алгоритм адаптирован для повторной инициализации системы после обнаружения срыва подачи, поэтому контроллер сначала проверяет, было ли вызвано повторное включение условием срыва подачи (560). Если нет, то двигатель повторно включается в соответствии с алгоритмом без срыва подачи (555). Если повторное включение было вызвано условием срыва подачи, двигатель осуществляет шаговое движение на протяжении оставшейся части хода (565). Когда он достигает конца хода вместо того, чтобы ожидать нормального времени задержки, контроллер удерживает двигатель в конце его хода в течение длительного времени задержки (570). В одном варианте реализации изобретения нормальное время задержки может составлять порядка тысячных долей секунды, а длительное время задержки может в три или более раз превышать обычное время задержки (обычно не более одной секунды). В альтернативном варианте реализации изобретения контроллер может осуществлять шаговое движение двигателя до конца обратного хода и удерживать его в данном состоянии в течение длительного времени задержки.
[0046] После того как контроллер находился в ожидании в течение продолжительного периода времени задержки, он повторно включает двигатель (575). Затем контроллер определяет, было ли повторное включение успешным (580). Если да, то контроллер возобновляет процесс контроля усилия, создаваемого двигателем во время рабочего хода, и определения условий срыва подачи, как, например, проиллюстрировано на Фиг. 5А. Если повторное включение не было успешным, контроллер определяет, было ли достигнуто пороговое количество попыток повторного включения (585). Например, контроллер может быть ограничен пятью попытками. Если пороговое количество не было достигнуто, контроллер может подождать в течение заданного интервала времени (590), прежде чем снова попытаться повторно включить двигатель (575). Если было достигнуто пороговое количество попыток повторного включения, контроллер уведомляет оператора (595) посредством оповещения об отказе с отключением, и оператор затем может вручную перезапустить систему.
[0047] Данные системы и способы предоставляют различные преимущества в отношении обычных методов определения условий срыва подачи в насосной системе и управления системой для предотвращения удара плунжера насоса по жидкости. Например, данные системы и способы не требуют применения тензометрических датчиков и насосных узлов, которые необходимы в традиционных скважинных насосах. Кроме того, обычные системы ПЭН не обладают функциональной возможностью вычислять мгновенное усилие, создаваемое двигателем и, следовательно, изменения усилия, которые указывают на условия срыва подачи. У данных систем и способов могут быть и другие преимущества.
[0048] Предшествующее описание раскрытых вариантов реализации изобретения предоставлено для того, чтобы любой специалист в данной области техники мог реализовать или использовать данное изобретение. Специалисты в данной области техники без труда увидят различные модификации в этих вариантах реализации изобретения. Например, функции, описанные выше в связи с контроллером двигателя, могут быть распределены между одним или большим количеством других компонентов системы привода. Кроме того, альтернативные варианты реализации изобретения могут включать различные этапы для достижения требуемого обнаружения срыва подачи, исходя из анализа усилия, и могут использовать различные пороговые значения усилия, значения счетчика и т.д. Следовательно, общие принципы, определенные в данной заявке, могут применяться и к другим вариантам реализации изобретения без отступления от сущности или объема данного изобретения. Таким образом, данное изобретение не предназначено для ограничения вариантами реализации, проиллюстрированными в данной заявке, а должно предоставляться в самом широком объеме, согласующемся с принципами и новыми признаками, раскрытыми в данном документе.
[0049] Улучшения и преимущества, которые могут быть обеспечены данным изобретением, описаны выше в отношении конкретных вариантов реализации изобретения. Эти улучшения и преимущества, а также любые элементы или ограничения, которые могут вызвать их возникновение или более явное выражение, не должны быть истолкованы как решающие, необходимые или существенные конструктивные особенности любого или всех описанных вариантов реализации изобретения. Используемые в данной заявке термины «содержит», «содержащий» или любые другие их варианты, должны быть истолкованы как не исключительные, включая элементы или ограничения, которые следуют за этими терминами. Соответственно, система, способ или другой вариант реализации изобретения, которые включают набор элементов, не ограничиваются только этими элементами, а могут включать другие элементы, не перечисленные в явном виде или свойственные для описанного варианта реализации изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ ПЕРЕМЕЩЕНИЕМ ШТОКА В СИСТЕМЕ ОТКАЧКИ ФЛЮИДА ИЗ СКВАЖИНЫ | 2005 |
|
RU2381384C1 |
| СИСТЕМА И СПОСОБ ОПРЕДЕЛЕНИЯ МОМЕНТА ДОСТИЖЕНИЯ ЛИНЕЙНЫМ ДВИГАТЕЛЕМ КОНЦЕВЫХ УПОРОВ | 2016 |
|
RU2652266C2 |
| Насосная установка нефтедобывающей скважины | 2020 |
|
RU2754053C1 |
| СИСТЕМА ГИДРАВЛИЧЕСКОГО НАСОСА ДЛЯ СКВАЖИННОГО ИНСТРУМЕНТА (ВАРИАНТЫ), СПОСОБ УПРАВЛЕНИЯ УКАЗАННЫМ НАСОСОМ И СПОСОБ ЭКСПЛУАТАЦИИ НАСОСНОЙ СИСТЕМЫ ДЛЯ СКВАЖИННОГО ИНСТРУМЕНТА | 2007 |
|
RU2442021C2 |
| СПОСОБ УПРАВЛЕНИЯ НАСОСНЫМ УЗЛОМ | 2006 |
|
RU2362039C2 |
| Установка плунжерная с линейным двигателем | 2024 |
|
RU2837176C1 |
| КОНТРОЛЛЕР БАЛАНСА В ПАРКЕ НАСОСОВ ПРИ ВЫПОЛНЕНИИ ОПЕРАЦИЙ РАЗРЫВА ПЛАСТА | 2019 |
|
RU2776144C1 |
| УПРАВЛЕНИЕ ОПЕРАЦИЯМИ РАЗРЫВА ПЛАСТА | 2019 |
|
RU2776140C1 |
| Контроллер и способ управления штанговой насосной установкой | 2018 |
|
RU2749236C2 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ УРАВНОВЕШЕННОСТИ СТАНКОВ-КАЧАЛОК ШТАНГОВЫХ НАСОСНЫХ УСТАНОВОК | 1995 |
|
RU2129666C1 |


Изобретение относится к линейным двигателям с постоянными магнитами и относится к средствам для контроля усилия, создаваемого линейным двигателем, и определения существования условия срыва подачи и управления двигателем для предотвращения удара плунжера насоса по жидкости, вызванного срывом подачи. Контролируется ток, потребляемый двигателем погружного электронасоса во время рабочего хода. На основании мгновенного тока определяются мгновенные усилия, создаваемые двигателем. На условия срыва подачи могут указывать непредвиденные значительные уменьшения создаваемого усилия, меньшие уменьшения усилия, которое возникает в течение более длительного периода времени, или усилия, которые являются меньше тех, которые наблюдаются в течение времени задержки. В ответ на обнаружение условия срыва подачи может осуществляться шаговое движение двигателя на протяжении оставшейся части хода, временная остановка и повторное включение. Тем самым предотвращается возникновение разрушающего удара плунжера насоса по жидкости, который в противном случае был бы результатом выполнения условия срыва подачи. 3 н. и 12 з.п. ф-лы, 6 ил.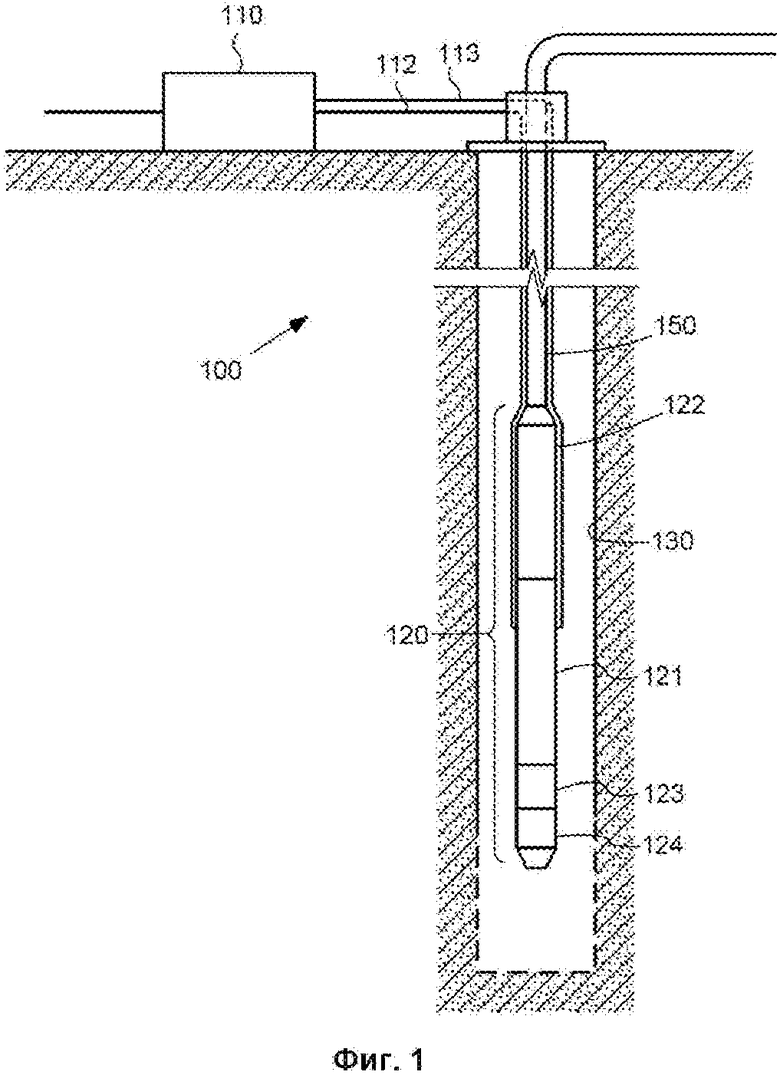
1. Система, содержащая погружной электронасос (ПЭН), установленный в скважине, электрический привод, расположенный на поверхности скважины, и кабель электропитания, подключенный между электрическим приводом и ПЭН, при этом электрический привод содержит один или большее количество датчиков тока, соединенных с выходом электрического привода, при этом датчики измеряют величину одного или большего количества токов выходной мощности переменного тока, подаваемых электрическим приводом к какому-нибудь линейному двигателю, при этом электрический привод содержит контроллер, который получает результаты измерений мгновенного тока от датчиков тока, определяет вектор мгновенного тока для каждой из одной или более фаз выходной мощности переменного тока на основании измеренных мгновенных токов и определяет мгновенное усилие на основании векторов мгновенного тока, при этом во время рабочего хода линейного двигателя контроллер вычисляет мгновенное усилие, созданное двигателем в каждый из множества моментов времени, в зависимости от векторов мгновенного тока, в соответствующие моменты времени и для одного или большего количества моментов времени, в которые контроллер определяет, существует ли условие срыва подачи и повторно включает линейный двигатель в ответ на определение того, что существует условие срыва подачи, при этом контроллер определяет, существует ли условие срыва подачи в соответствующий момент времени путем определения того, является ли мгновенное усилие, созданное двигателем в соответствующий момент времени, меньше заданной процентной величины от мгновенного усилия, созданного двигателем в предыдущий момент времени, и при этом контроллер определяет мгновенное усилие для каждого момента времени путем измерения векторов мгновенного тока каждой из трех фаз выходной мощности для соответствующего момента времени и вычисляет мгновенное усилие как среднеквадратичное значение векторов мгновенного тока, умноженное на постоянный коэффициент мощности.
2. Способ управления линейным двигателем, включающий приведение в действие линейного двигателя, измерение тока, потребляемого двигателем во время рабочего хода линейного двигателя в каждый из множества моментов времени, и вычисление мгновенного усилия, созданного двигателем в каждый из множества моментов времени, в зависимости от соответствующего тока, потребляемого двигателем, определение того, существует ли условие срыва подачи в каждый из моментов времени после первого одного из моментов времени, при этом линейный двигатель повторно включают, если существует условие срыва подачи, и продолжают приводить в движение линейный двигатель, если отсутствует условие срыва подачи, и при этом определение существования условия срыва подачи в соответствующий момент времени включает определение того, является ли мгновенное усилие, созданное двигателем в соответствующий момент времени, меньше заданной процентной величины от мгновенного усилия, созданного двигателем в предыдущий момент времени.
3. Способ по п. 2, отличающийся тем, что определение мгновенного усилия для каждого момента времени включает измерение векторов мгновенного тока каждой из трех фаз мощности, потребляемой линейным двигателем в соответствующий момент времени, и вычисление мгновенного усилия как среднеквадратичного значения векторов мгновенного тока, умноженного на постоянный коэффициент мощности.
4. Способ по п. 2, отличающийся тем, что определение того, существует ли условие срыва подачи в соответствующий момент времени, включает определение того, является ли мгновенное усилие, созданное двигателем в соответствующий момент времени, меньше 35% от мгновенного усилия, созданного двигателем в предыдущий момент времени; причем линейный двигатель не находится в фазе ускорения рабочего хода.
5. Способ по п. 2, дополнительно включающий повторное включение линейного двигателя, когда мгновенное усилие, созданное двигателем в соответствующий момент времени в фазе ускорения линейного двигателя, меньше минимального усилия, зарегистрированного в течение времени задержки линейного двигателя.
6. Способ по п. 2, дополнительно включающий шаговое движение линейного двигателя на протяжении оставшейся части рабочего хода в управляемом режиме до повторного включения линейного двигателя.
7. Способ по п. 2, дополнительно включающий после определения того, что существует условие срыва подачи, задержку в течение заданного интервала времени перед начальным повторным включением линейного двигателя.
8. Способ по п. 2, отличающийся тем, что определение того, существует ли условие срыва подачи в соответствующий момент времени, включает определение, составляет ли мгновенное усилие, создаваемое двигателем в соответствующий момент времени, от 35 до 75% мгновенного усилия, создаваемого двигателем в предыдущий момент времени, причем линейный двигатель не находится в фазе ускорения рабочего хода; если мгновенное усилие, создаваемое двигателем в соответствующий момент времени, составляет от 35 до 75% мгновенного усилия, создаваемого двигателем в предыдущий момент времени, и линейный двигатель не находится в фазе ускорения рабочего хода, осуществляют приращение счетчика сбоев при малом усилии и повторно включают линейный двигатель, если счетчик сбоев при малом усилии достигает порогового значения.
9. Система, содержащая линейный двигатель и электрический привод, соединенный с линейным двигателем для обеспечения выходной мощности, тем самым приводящий в движение линейный двигатель, при этом электрический привод измеряет ток выходной мощности и во время рабочего хода линейного двигателя вычисляет мгновенное усилие, создаваемое двигателем в каждый из множества моментов времени, в зависимости от тока, потребляемого двигателем в соответствующие моменты времени, при этом для одного или большего числа моментов времени электрический привод определяет, существует ли условие срыва подачи, и повторно включает линейный двигатель в ответ на определение того, что существует условие срыва подачи, и при этом электрический привод определяет, существует ли условие срыва подачи в соответствующий момент времени путем определения того, является ли мгновенное усилие, созданное двигателем в соответствующий момент времени, меньше заданной процентной величины от мгновенного усилия, созданного двигателем в предыдущий момент времени.
10. Система по п. 9, отличающаяся тем, что электрический привод определяет мгновенное усилие для каждого момента времени путем измерения векторов мгновенного тока каждой из трех фаз выходной мощности для соответствующего момента времени и вычисляет мгновенное усилие как среднеквадратичное значение векторов мгновенного тока, умноженное на постоянный коэффициент мощности.
11. Система по п. 9, отличающаяся тем, что электрический привод определяет, существует ли условие срыва подачи в соответствующий момент времени, посредством определения, является ли мгновенное усилие, созданное двигателем в соответствующий момент времени, меньше 35% от мгновенного усилия, созданного двигателем в предыдущий момент времени; причем линейный двигатель не находится в фазе ускорения рабочего хода.
12. Система по п. 9, отличающаяся тем, что электрический привод повторно включает линейный двигатель, когда мгновенное усилие, созданное двигателем в соответствующий момент времени в фазе ускорения линейного двигателя, меньше минимального усилия, зарегистрированного в течение времени задержки линейного двигателя.
13. Система по п. 9, отличающаяся тем, что в ответ на определение, что существует условие срыва подачи, электрический привод осуществляет шаговое движение линейного двигателя на протяжении оставшейся части рабочего хода в управляемом режиме до повторного включения линейного двигателя.
14. Система по п. 9, отличающаяся тем, что электрический привод после определения того, что существует условие срыва подачи, устанавливает в заданное положение двигатель в конце рабочего хода и задерживает его в течение заданного интервала времени в конце рабочего хода до начала повторного включения линейного двигателя.
15. Система по п. 9, отличающаяся тем, что электрический привод определяет, существует ли условие срыва подачи в соответствующий момент времени, посредством определения того, составляет ли мгновенное усилие, создаваемое двигателем в соответствующий момент времени, от 35 до 75% мгновенного усилия, создаваемого двигателем в предыдущий момент времени, причем линейный двигатель не находится в фазе ускорения рабочего хода; если мгновенное усилие, создаваемое двигателем в соответствующий момент времени, составляет от 35 до 75% мгновенного усилия, создаваемого двигателем в предыдущий момент времени, и линейный двигатель не находится в фазе ускорения рабочего хода, осуществляют приращение счетчика сбоев при малом усилии и повторно включают линейный двигатель, если счетчик сбоев при малом усилии достигает порогового значения.
| US 20090256519 A1, 15.10.2009 | |||
| US 6599095 B1, 29.07.2003 | |||
| US2004062657 A1, 01.04.2004 | |||
| СПОСОБ ЭКСПЛУАТАЦИИ СКВАЖИНЫ НАСОСНОЙ УСТАНОВКОЙ С ЧАСТОТНО-РЕГУЛИРУЕМЫМ ПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2522565C1 |
| СПОСОБ ЭКСПЛУАТАЦИИ МАЛОДЕБИТНОЙ СКВАЖИНЫ ЭЛЕКТРОНАСОСОМ С ЧАСТОТНО-РЕГУЛИРУЕМЫМ ПРИВОДОМ | 1997 |
|
RU2119578C1 |
| СПОСОБ ЭКСПЛУАТАЦИИ СКВАЖИНЫ ПОГРУЖНЫМ ЭЛЕКТРОНАСОСОМ С ЧАСТОТНО-РЕГУЛИРУЕМЫМ ПРИВОДОМ | 2003 |
|
RU2250357C2 |

